Research Issues and Results to Date" on Robotic Exploration of Mars!
|
|
|
- Emory York
- 6 years ago
- Views:
Transcription

1 Research Issues and Results to Date" on! Larry Matthies! Computer Vision Group! California Institute of Technology!

2 Science Themes for Mars Exploration! W A T E R Look for Life Understand Climate Explore Geology When Where Form Amount Prepare for Human Exploration

3 Signs of Past Water on Mars! Viking orbiter photo!



4 Mars Landing Sites! -8! 0! +12 km! Phoenix 70! 60! VL2 50! VL1 MPF Opportunity Spirit 40! 30! 20! 10! 0! -10! -20! -30! -40! -50! -60! -180! -120! -60! -70! 0! 60! 120! 180!


5 Gullies in Crater and Canyon Walls!

6 Glacier-like Flows in Mid-Latitudes!

7 Fossil Delta! Interpreted as exhumed river delta with a meander! Mars Global Surveyor photo!

8 Distribution of Modern Water!

9 Mars Climate History! 4.5 Ga! 3.9! 3.1! 0!



10 Climate Cycles and Layered Terrain!

11 Recent and Future NASA Mars Surface Vehicles 20 MHz! ~ 120 MHz! 2 MHz! lhm - 11
12 Mars Mission Capabilities! Mars Pathfinder (MPF)! 2 MHz processor clock! Structured light obstacle detection! Reactive obstacle avoidance (no map)! Stayed close to lander! Terrain mapping from lander stereo! Mars Exploration Rover (MER)! 20 MHz processor clock! Stereo-based (SAD1) obs. det.! Local map-based obs. avoidance! Visual odometry (3D to 3D pose)! Lander horizontal velocity estimation! Global route planning (D*)! Target tracking! Dust devil and cloud detection! Localization relative to orbital imagery! Mars Phoenix! Landing site rock distribution from orbit! Mars Science Lab (MSL)! Basically same navigation as MER! Work in progress! Improved sample acquisition! Higher performance computing! Precision landing! Landing hazard avoidance! Sink, slip prediction! Rough terrain path planning! Steep terrain access!
![Sojourner s Drive Path: 0.1 km in 0.3 years [Mishkin AERO 1998]!](/docs-images/74/71038990/images/13-2.jpg "[Wilcox ICES 1998]! [Matijevic JGR 1997]! [Matthies AURO 1995]!")
13 Sojourner s Drive Path: 0.1 km in 0.3 years [Mishkin AERO 1998]! [Wilcox ICES 1998]! [Matijevic JGR 1997]! [Matthies AURO 1995]! lhm - 13

14 Mars Exploration Rover Mission! Pancams! Hazcams! Navcams! Driving modes:! Blind: 120 m/hr! ODOA: < 35 m/hr! VO: 10 m/hr! Hazcams! Microscopic imager! ODOA+VO: 5 m/hr!



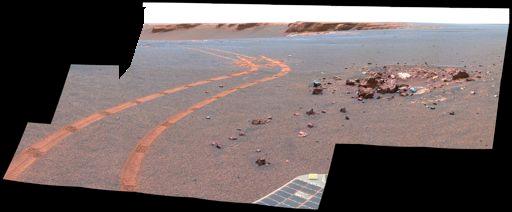
15 Opportunity s Drive Path: 20.8 km in 6.4 years Victoria Crater! lhm - 15

16 Rover Mobility Challenge: Steep Terrain lhm - 16

17 Spirit s Drive Path: 7.7 km in 6.4 years lhm - 17




18 Rover Mobility Challenge: Soft Soil!




19 Obstacle Detection and Avoidance! [Goldberg AERO 2002, Biesiadecki AERO 2006]!





![2005]!](/docs-images/74/71038990/images/20-8.jpg "[Maimone JFR 2007,")
![Johnson ICRA 2008]!](/docs-images/74/71038990/images/20-9.jpg "[Castano MVA 2008]!")
20 Other Capabilities Onboard MER Rovers! Stereo visual odometry, 3D to 3D pose on successive pairs! 1375 m run: red, GPS; MSL-VO (< 3% error in 100 m)! [Lindemann SMC 2005]! [Maimone JFR 2007, Johnson ICRA 2008]! [Castano MVA 2008]! [Kim JFR 2009]! 9.65 m 6.11 m! 3.05 m! 1.92 m!

21 Rover Global Localization! Bundle adjustment plus mosaic registration to orbital imagery! [Di ISPRS 2008]!


22 MER Descent Image Motion Estimation System" [Johnson IJCV 2007]!
23 Spirit Terminal Descent Reconstruction!



24 Shadow-based Rock Detection" for Phoenix Landing Site Selection!




25 Shadow-based Rock Detection" for Phoenix Landing Site Selection! Auto-counted 10 million rocks in 1500 km 2! [Golombek JGR 2008]!
 ~ 20 x 10 km!")
26 Precision Landing Roadmap! 1 st Generation EDL (MER) 80 x 10 km! 3 rd Generation EDL 200 m! 2 nd Generation EDL (MSL) ~ 20 x 10 km!

27 MSL Entry, Descent, and Landing Scenario!

28 Map Matching for Precision Landing! Prior information:! Imagery and elevation map of the terrain, optionally with albedo map! Lat/long and time of landing! Other onboard sensing:! IMU => good attitude knowledge! Radar altimeter => good altitude knowledge! Problem reduces to estimating horizontal position by image matching with known scale, orientation, and lighting! Two phases:! High position uncertainty: FFT correlation of entire descent image against map image! Low position uncertainty: spatial domain correlation of multiple small descent image patches against map image! Descent image features Matches in map image
 Filter!")

![[Mourikis TRO 2009]!](/docs-images/74/71038990/images/29-2.jpg "Descent# Images!")




29 ST9 Vision Aided Inertial Navigation (VISINAV) Filter! Descent" Camera! [Johnson AIAA 2007]! [Mourikis TRO 2009]! Descent# Images! Prior Reconnaissance! Image! Elevation# Map! Map! Feature Tracking Map Matching Inertial! Measurement" Unit! 2D image to 2D image matches angular rates and accelerations VISINAV Kalman Filter 2D image to 3D map matches altitudes Radar" Altimeter! Lander position, velocity, attitude IMU gyro and accelerometer biases



30 ST9 Data Collection Flight" White Sands Missile Range, April 2006! Produced descent imagery at 30 Hz from 4000 m above ground to landing, with 50 Hz IMU data and ground truth position via GPS at 10 Hz! cameras [Thurman AIAA 2007]!

! Map with 0.")
31 ST9 Multi-Feature Map Matching Results! Images from 1600m to 300m AGL! Images once a second! Image resolutions range from 1.5m to 0.3m (5x change in scale)! Map with 0.9m/pixel, 5 years old! Image Features Map Matches


32 parachute deployment /s roll rates! ST9 Feature Tracking Results! near touchdown - 2x change in scale!
33 ST9 VISINAV Results! Position Error at Touchdown (m)! North! East! Down! IMU Propagation! -1400! 6900! 5900! VISINAV! -1.7! 0.1! -6.2! Velocity Error at Touchdown (m/s)! North! East! Down! IMU Propagation! -3.1! 30! 11! VISINAV! 0.13! 0.06! -0.07! Remaining issues:! Shadows at low sun elevation! Large altitude uncertainty before radar lock-up!
34

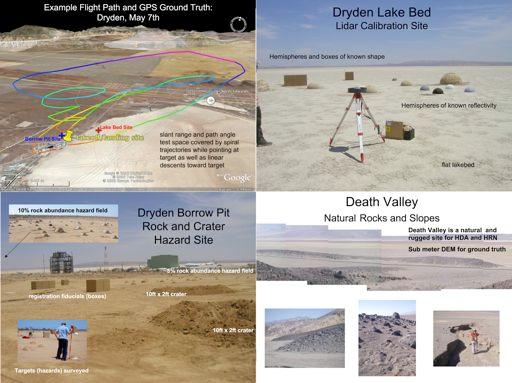
35 FT1: HDA and HRN! Test Platform! Test Platform" Gimbal with! Flash Lidar" Terrain Relative Navigation Cameras"
36





37 3D Points! Example Flash " Lidar Image! 128x128 pixels! 430m Range! 7 Off Nadir! Elevation Map! 2x2x1m box! 1x1x1m box! Top View! 0.9m radius" hemispheres! 0.6 radius" hemispheres! [Johnson AERO 2010]! 20m Oblique View! Side View!
! [Villalpando AERO 2010]!")
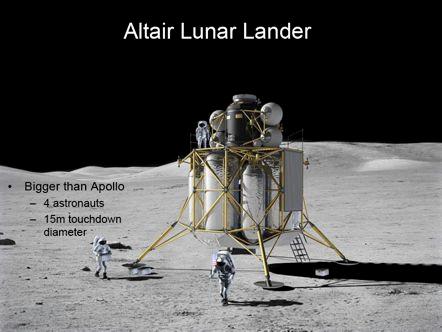
38 Lander and Orbiter Processing:" Multi-core Mesh Architecture (Tilera)! [Villalpando AERO 2010]!
39 ??? FPGA Rover Co-Processor:" Anticipated Benefit! MER driving modes:! Blind: 120 m/hr! ODOA: < 35 m/hr! VO: 10 m/hr! ODOA+VO: 5 m/hr! [Villalpando MAPLD 2006]!




40 Applications for Better Terrain Classification" and Slip/Sink Prediction on Mars!

![[Angelova JFR 2007]!](/docs-images/74/71038990/images/41-3.jpg "Terrain classifier fbedrock")


:!")
41 Learning Slip Prediction: Approach! [Angelova JFR 2007]! Terrain classifier fbedrock fcoh. soil fsand Slip modeling Nonlinear regression Slip Texton based approach! Build dictionary of texture elements (textons):! Slope from sand from gravel Build statistics of texton responses:!




42 Without Slip Prediction! Learning Slip Prediction:! End-to-End Demonstration! With Slip Prediction! Slip %! bedrock! soil! rock! [Helmick JFR 2009]!

43 ExoMars Rover!

44 ExoMars Rover Rear View!

45 Potential Future Mission Set!
46 Summary of (Some) Challenges! Ongoing work! " High performance computing! " Precision landing with hazard avoidance! " Sample acquisition, sample return! " Steep terrain access: rappelling systems! Future work! " Sensing soft soil ahead! " Steep terrain access: other systems?! " Deep subsurface access!
47 References! [Angelova JFR 2007] A. Angelova, L. Matthies, D. Helmick, P. Perona, Learning and prediction of slip from visual information, Journal of Field Robotics, 24(3), 2007! [Ansar IROS 2009] A. Ansar, L. Matthies, Multi-model image registration for localization in Titan$s atmosphere, IROS 2009! [Biesiadecki AERO 2006] J. Biesiadecki, M. Maimone, The Mars Exploration Rover surface mobility flight software: driving ambition, IEEE Aerospace Conference, 2006! [Castano MVA 2008] A. Castano et al., Automatic detection of dust devils and clouds on Mars, Machine Vision and Applications J., Oct. 2008! [Cheng AAS 2003] Y. Cheng, A.E. Johnson, C. Olson, L. Matthies, Optical landmark detection for spacecraft navigation, 13 th Annual AAS/AIAA Space Flight Mechanics Meeting, 2003! [Di ISPRS 2008] K. Di et al., Photogrammetric processing of rover imagery of the 2003 Mars Exploration Rover mission, ISPRS Journal of Photogrammetry and Remote Sensing, 2008! [Goldberg AERO 2002] S. Goldberg, M. Maimone, L. Matthies, Stereo vision and rover navigation software for planetary exploration, IEEE Aerospace Conference, 2002! [Golombek JGR 2008] M.P. Golombek et al., Size-frequency distributions of rocks on the northern plains of Mars with special reference to Phoenix landing surfaces, Journal of Geophysical Research Planets, 2008! [Helmick JFR 2009] D. Helmick, A. Angelova, L. Matthies, Terrain adaptive navigation for planetary rovers, Journal of Field Robotics, 26(4), 2009! [Johnson ICRA 2005] A.E. Johnson, J. Montgomery, L. Matthies, Vision-guided landing of an autonomous helicopter in hazardous terrain, ICRA 2005! [Johnson IJCV 2007] A. Johnson et al., Design through operation of an image-based velocity estimation system for Mars landing, Int#l J. Computer Vision, 2007!
48 References! [Johnson AIAA 2007] A. Johnson et al., A general approach to terrain relative navigation for planetary landing, AIAA Infotech at Aerospace Conference, 2007! [Johnson ICRA 2008] A.E. Johnson, S.B. Goldberg, Y. Cheng, L.H. Matthies, Robust and efficient stereo feature tracking for visual odometry, ICRA, 2008! [Johnson AERO 2010] A.E. Johnson, J.A. Keim, T. Ivanov, Analysis of flash lidar field test data for safe lunar landing, IEEE Aerospace Conference, 2010! [Kim JFR 2009] W.S. Kim et al., Targeted driving using visual tracking on Mars: from research to flight, Journal of Field Robotics, 26(3), 2009! [Di ISPRS 2008] K. Di et al., Photogrammetric processing of rover imagery of the 2003 Mars Exploration Rover mission, ISPRS Journal of Photogrammetry and Remote Sensing, 2008! [Lindemann SMC 2005] R. Lindemann, C. Voorhees, Mars Exploration Rover mobility assembly design, test, and performance, IEEE Conf. on Systems, Man, and Cybernetics, 2005! [Maimone JFR 2007] M. Maimone, Y. Cheng, L. Matthies, Two years of visual odometry on the Mars Exploration Rovers, Journal of Field Robotics, 24(3), 2007! [Matthies AURO 1995] L. Matthies, E. Gat, R. Harrison, B. Wilcox, R. Volpe, T. Litwin, Mars microrover navigation: performance evaluation and enhancement, Autonomous Robots, 2(4), 1995! [Matijevic JGR 1997] J.R. Matijevic et al., The Pathfinder Microrover, Journal of Geophysical Research Planets, Feb 1997! [Mishkin AERO 1998] A.H. Mishkin, J.C. Morrison, T.T. Nguyen, H.W. Stone, B.K. Cooper, B.H. Wilcox, Experiences with operations and autonomy of the Mars Pathfinder Microrover, IEEE Aerospace Conference, 1998! [Mourikis TRO 2009] A.I. Mourikis et al., Vision-aided inertial navigation for spacecraft entry, descent, and landing, IEEE Transactions on Robotic and Automation, 25(2), 2009!
49 References! [Thurman AIAA 2007] S. Thurman, L. Matthies, J.M. Corliss, R.K. Johnson, Space flight testing of vision-guided planetary landing system, AIAA Infotech at Aerospace Conference, 2007! [Villalpando MAPLD 2006] C. Villalpando, Acceleration of stereo correlation in Verilog, 9 th Military and Aerospace Programmable Logic Devices Int#l Conference, 2006! [Villalpando AERO 2010] C.Y. Villalpando, A.E. Johnson, R. Some, J. Oberlin, Investigation of the Tilera processor for real time hazard detection and avoidance on the Altair lunar lander, IEEE Aerospace Conference, 2010! [Wilcox ICES 1998] B. Wilcox, T. Nguyen, Sojourner on Mars and lessons learned for future planetary rovers, 28 th Int#l Conf. on Environmental Systems, July 1998! [Wilcox AERO 2010] B.H. Wilcox, ATHLETE: lunar cargo unloading from a high deck, IEEE Aerospace Conference, 2010! [Williams APL 2002] B.G. Williams, Technical challenges and results for navigation of NEAR Shoemaker, Johns Hopkins APL Technical Digest, 23(1), 2002!
Long-Range Rovers for Mars Exploration and Sample Return
 2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
Robo$cs Mission Experience from Mars. Brian Wilcox Mark Maimone Andy Mishkin 5 August 2009
 Robo$cs Mission Experience from Mars Brian Wilcox Mark Maimone Andy Mishkin 5 August 2009 MER Mobility Hardware Wide FOV stereo HAZCAMs (front & rear) for on-board hazard detection Stereo NAVCAMS & PANCAMS
Robo$cs Mission Experience from Mars Brian Wilcox Mark Maimone Andy Mishkin 5 August 2009 MER Mobility Hardware Wide FOV stereo HAZCAMs (front & rear) for on-board hazard detection Stereo NAVCAMS & PANCAMS
 Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
From MARS To MOON. V. Giorgio Director of Italian Programs. Sorrento, October, All rights reserved, 2007, Thales Alenia Space
 From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
VISION-BASED NAVIGATION TECHNIQUES IN PLANETARY ROVERS
 REPORT 15.12.2010 VISION-BASED NAVIGATION TECHNIQUES IN PLANETARY ROVERS Hans Baumgartner 6153583 CONTENTS ABBREVIATIONS... 3 1. INTRODUCTION... 4 2. PLANETARY ROVERS... 5 2.1 History... 5 2.2 Sensors
REPORT 15.12.2010 VISION-BASED NAVIGATION TECHNIQUES IN PLANETARY ROVERS Hans Baumgartner 6153583 CONTENTS ABBREVIATIONS... 3 1. INTRODUCTION... 4 2. PLANETARY ROVERS... 5 2.1 History... 5 2.2 Sensors
NEXT Exploration Science and Technology Mission. Relevance for Lunar Exploration
 NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
European Lunar Lander: System Engineering Approach
 human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
Landing Targets and Technical Subjects for SELENE-2
 Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
The European Lunar Lander Mission
 The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
Lunar Architecture and LRO
 Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
An Overview of CSA s s Space Robotics Activities
 An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS. Nagin Cox
 THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS Nagin Cox Jet Propulsion Laboratory National Air & Space Administration/California Institute of Technology Email: nagin@jpl.nasa.gov Abstract: Since
THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS Nagin Cox Jet Propulsion Laboratory National Air & Space Administration/California Institute of Technology Email: nagin@jpl.nasa.gov Abstract: Since
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, GMT
 Friday, October 30, GMT") Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Smart Robots on Mars: Deciding Where to Go and. What to See
 Smart Robots on Mars: Deciding Where to Go and What to See Kiri L. Wagstaff September 16, 2008 INTRODUCTION T he planet Mars has much in common with the Earth, including a similar rocky composition and
Smart Robots on Mars: Deciding Where to Go and What to See Kiri L. Wagstaff September 16, 2008 INTRODUCTION T he planet Mars has much in common with the Earth, including a similar rocky composition and
Unmanned Surface Vessels - Opportunities and Technology
 Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Tradeoffs Between Directed and Autonomous Driving on the Mars Exploration Rovers
 Tradeoffs Between Directed and Autonomous Driving on the Mars Exploration Rovers Jeffrey J. Biesiadecki, Chris Leger, and Mark W. Maimone Jet Propulsion Laboratory California Institute of Technology Pasadena,
Tradeoffs Between Directed and Autonomous Driving on the Mars Exploration Rovers Jeffrey J. Biesiadecki, Chris Leger, and Mark W. Maimone Jet Propulsion Laboratory California Institute of Technology Pasadena,
Historical Perspectives: Evolution of Recent Mars EDL Systems Development. 6th International Planetary Probe Workshop June 2008 Erisa K Hines
 Historical Perspectives: Evolution of Recent Mars EDL Systems Development 6th International Planetary Probe Workshop 23-27 June 2008 Erisa K Hines Overview An examination of the EDL system engineering
Historical Perspectives: Evolution of Recent Mars EDL Systems Development 6th International Planetary Probe Workshop 23-27 June 2008 Erisa K Hines Overview An examination of the EDL system engineering
On the feasibility of a fast track return to Mars
 On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
Tradeoffs Between Directed and Autonomous Driving on the Mars Exploration Rovers
 Tradeoffs Between Directed and Autonomous Driving on the Mars Exploration Rovers Jeffrey J. Biesiadecki and Chris Leger and Mark W. Maimone Jet Propulsion Laboratory California Institute of Technology
Tradeoffs Between Directed and Autonomous Driving on the Mars Exploration Rovers Jeffrey J. Biesiadecki and Chris Leger and Mark W. Maimone Jet Propulsion Laboratory California Institute of Technology
A New Facility for Lander Touchdown and Rover Mobility Testing at DLR
 A New Facility for Lander Touchdown and Rover Mobility Testing at DLR Lutz Richter, Antje Brucks, Lars Witte DLR Institute of Space Systems, Bremen, Germany New DLR Institute of Space Systems Systems Analysis
A New Facility for Lander Touchdown and Rover Mobility Testing at DLR Lutz Richter, Antje Brucks, Lars Witte DLR Institute of Space Systems, Bremen, Germany New DLR Institute of Space Systems Systems Analysis
CHANGING ENTRY, DESCENT, AND LANDING PARADIGMS FOR HUMAN MARS LANDER
 National Aeronautics and Space Administration CHANGING ENTRY, DESCENT, AND LANDING PARADIGMS FOR HUMAN MARS LANDER Alicia Dwyer Cianciolo NASA Langley Research Center 2018 International Planetary Probe
National Aeronautics and Space Administration CHANGING ENTRY, DESCENT, AND LANDING PARADIGMS FOR HUMAN MARS LANDER Alicia Dwyer Cianciolo NASA Langley Research Center 2018 International Planetary Probe
Curiosity lands on Mars
 Curiosity lands on Mars Early Monday morning (August 6, 2012), the Mars rover named Curiosity successfully landed on the surface of Mars. The rover launched on November 26 th, 2011 and traveled for 8 ½
Curiosity lands on Mars Early Monday morning (August 6, 2012), the Mars rover named Curiosity successfully landed on the surface of Mars. The rover launched on November 26 th, 2011 and traveled for 8 ½
Subsonic Parachutes for Future Mars Missions
 Subsonic Parachutes for Future Mars Missions John C. Underwood, Arrun Saunders, Steven B. Rogers, J. Stephen Lingard Vorticity Ltd Lionel Marraffa, Luca Ferracina European Space Agency 1 Mars Parachutes
Subsonic Parachutes for Future Mars Missions John C. Underwood, Arrun Saunders, Steven B. Rogers, J. Stephen Lingard Vorticity Ltd Lionel Marraffa, Luca Ferracina European Space Agency 1 Mars Parachutes
Lunette: A Global Network of Small Lunar Landers
 Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Light-Lift Rocket II
 Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Challenges of Designing the MarsNEXT Network
 Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Introduction Projects Basic Design Perception Motion Planning Mission Planning Behaviour Conclusion. Autonomous Vehicles
 Dipak Chaudhari Sriram Kashyap M S 2008 Outline 1 Introduction 2 Projects 3 Basic Design 4 Perception 5 Motion Planning 6 Mission Planning 7 Behaviour 8 Conclusion Introduction Unmanned Vehicles: No driver
Dipak Chaudhari Sriram Kashyap M S 2008 Outline 1 Introduction 2 Projects 3 Basic Design 4 Perception 5 Motion Planning 6 Mission Planning 7 Behaviour 8 Conclusion Introduction Unmanned Vehicles: No driver
On Orbit Refueling: Supporting a Robust Cislunar Space Economy
 On Orbit Refueling: Supporting a Robust Cislunar Space Economy Courtesy of NASA 3 April 2017 Copyright 2014 United Launch Alliance, LLC. All Rights Reserved. Atlas V Launch History ULA s Vision: Unleashing
On Orbit Refueling: Supporting a Robust Cislunar Space Economy Courtesy of NASA 3 April 2017 Copyright 2014 United Launch Alliance, LLC. All Rights Reserved. Atlas V Launch History ULA s Vision: Unleashing
Autonomous Sample Acquisition for the ExoMars Rover
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Autonomous Sample Acquisition for
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Autonomous Sample Acquisition for
Mobile Payload Element (MPE)
") Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
Name: Space Exploration PBL
 Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Analysis of Power Storage Media for the Exploration of the Moon
 Analysis of Power Storage Media for the Exploration of the Moon Michael Loweth, Rachel Buckle ICEUM 9 22-26 th October 2007 ABSL Space Products 2005 2007 Servicing USA and the ROW UNITED KINGDOM Culham
Analysis of Power Storage Media for the Exploration of the Moon Michael Loweth, Rachel Buckle ICEUM 9 22-26 th October 2007 ABSL Space Products 2005 2007 Servicing USA and the ROW UNITED KINGDOM Culham
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
Mars Exploration Rover Surface Operations: Driving Spirit at Gusev Crater
 Mars Exploration Rover Surface Operations: Driving Spirit at Gusev Crater P. Chris Leger, Ashitey Trebi-Ollennu, John R. Wright, Scott A. Maxwell, Robert G. Bonitz, Jeffrey J. Biesiadecki, Frank R. Hartman,
Mars Exploration Rover Surface Operations: Driving Spirit at Gusev Crater P. Chris Leger, Ashitey Trebi-Ollennu, John R. Wright, Scott A. Maxwell, Robert G. Bonitz, Jeffrey J. Biesiadecki, Frank R. Hartman,
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE
 INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers
 Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers Instructions You have just been notified that NASA is planning to launch another Mars Rover Mission and you are going to design
Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers Instructions You have just been notified that NASA is planning to launch another Mars Rover Mission and you are going to design
Space Robotics Planetary Exploration - a DLR Perspective
 Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science
 Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
DRIVING ON THE SURFACE OF MARS USING THE ROVER CONTROL WORKSTATION
 DRIVING ON THE SURFACE OF MARS USING THE ROVER CONTROL WORKSTATION Brian K. Cooper Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive Pasadena, CA 91109 818-354-6298 brian.k.cooper@jpl.nasa.gov
DRIVING ON THE SURFACE OF MARS USING THE ROVER CONTROL WORKSTATION Brian K. Cooper Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive Pasadena, CA 91109 818-354-6298 brian.k.cooper@jpl.nasa.gov
FIDO ROVER FIELD TRIALS AS REHEARSAL FOR THE NASA 2003 MARS EXPLORATION ROVERS MISSION
 FIDO ROVER FIELD TRIALS AS REHEARSAL FOR THE NASA 2003 MARS EXPLORATION ROVERS MISSION Edward Tunstel, Terry Huntsberger, Hrand Aghazarian, Paul Backes, Eric Baumgartner, Yang Cheng, Michael Garrett, Brett
FIDO ROVER FIELD TRIALS AS REHEARSAL FOR THE NASA 2003 MARS EXPLORATION ROVERS MISSION Edward Tunstel, Terry Huntsberger, Hrand Aghazarian, Paul Backes, Eric Baumgartner, Yang Cheng, Michael Garrett, Brett
Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability
 Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability 2007 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar
Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability 2007 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar
Lunar Missions by Year - All Countries. Mission count dropped as we transitioned from politically driven missions to science driven missions
 n Lunar Missions by Year - All Countries Key: All Mission Attempts Mission Successes Mission count dropped as we transitioned from politically driven missions to science driven missions Capability Driven
n Lunar Missions by Year - All Countries Key: All Mission Attempts Mission Successes Mission count dropped as we transitioned from politically driven missions to science driven missions Capability Driven
Design and Navigation of Flying Robots
 Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
Design of Mobility System for Ground Model of Planetary Exploration Rover
 Technical Paper J. Astron. Space Sci. 29(4), 413-422 (2012) Design of Mobility System for Ground Model of Planetary Exploration Rover Younkyu Kim 1, Wesub Eom 1, Joo-Hee Lee 1, 2, and Eun-Sup Sim 1 1 Aerospace
Technical Paper J. Astron. Space Sci. 29(4), 413-422 (2012) Design of Mobility System for Ground Model of Planetary Exploration Rover Younkyu Kim 1, Wesub Eom 1, Joo-Hee Lee 1, 2, and Eun-Sup Sim 1 1 Aerospace
This is Ground Control... Professor Derek Long Department of Informatics King s College London
 This is Ground Control... Professor Derek Long Department of Informatics King s College London Deep in Space... Rosetta and Philae 67P/Churyumov-Gerasimenko Launch 2004, arrive 2014 Mars Express 2003 Mars
This is Ground Control... Professor Derek Long Department of Informatics King s College London Deep in Space... Rosetta and Philae 67P/Churyumov-Gerasimenko Launch 2004, arrive 2014 Mars Express 2003 Mars
Copyright 2016 by Innoviz All rights reserved. Innoviz
 Innoviz 0 Cutting Edge 3D Sensing to Enable Fully Autonomous Vehicles May 2017 Innoviz 1 Autonomous Vehicles Industry Overview Innoviz 2 Autonomous Vehicles From Vision to Reality Uber Google Ford GM 3
Innoviz 0 Cutting Edge 3D Sensing to Enable Fully Autonomous Vehicles May 2017 Innoviz 1 Autonomous Vehicles Industry Overview Innoviz 2 Autonomous Vehicles From Vision to Reality Uber Google Ford GM 3
THE HISTORY OF MARS EXPLORATION
 THE HISTORY OF MARS EXPLORATION Philippe Masson 1st Mars Express Science Conference (ESTEC, February 21-25, 2005) Mars Observers: The European Pioneers Nicolaus Copernicus: described the motion of the
THE HISTORY OF MARS EXPLORATION Philippe Masson 1st Mars Express Science Conference (ESTEC, February 21-25, 2005) Mars Observers: The European Pioneers Nicolaus Copernicus: described the motion of the
Four-Wheel Rover Performance Analysis at Lunar Analog Test
 Four-Wheel Rover Performance Analysis at Lunar Analog Test Nathan Britton, John Walker, Kazuya Yoshida, Toshiro Shimuzu, Tommaso Paniccia, and Kei Nakata Abstract A high fidelity field test of a four-wheeled
Four-Wheel Rover Performance Analysis at Lunar Analog Test Nathan Britton, John Walker, Kazuya Yoshida, Toshiro Shimuzu, Tommaso Paniccia, and Kei Nakata Abstract A high fidelity field test of a four-wheeled
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity
 The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
The Mars Express Mission A Continuing Challenge. Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner
 The Mars Express Mission A Continuing Challenge Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner Mars Society, Munich, 13 October, 2012 The Mars Express Mission - a First in
The Mars Express Mission A Continuing Challenge Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner Mars Society, Munich, 13 October, 2012 The Mars Express Mission - a First in
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012
 Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Reentry Demonstration Plan of Flare-type Membrane Aeroshell for Atmospheric Entry Vehicle using a Sounding Rocket
 AIAA ADS Conference 2011 in Dublin 1 Reentry Demonstration Plan of Flare-type Membrane Aeroshell for Atmospheric Entry Vehicle using a Sounding Rocket Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki
AIAA ADS Conference 2011 in Dublin 1 Reentry Demonstration Plan of Flare-type Membrane Aeroshell for Atmospheric Entry Vehicle using a Sounding Rocket Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki
Red Team. DARPA Grand Challenge Technical Paper. Revision: 6.1 Submitted for Public Release. April 8, 2004
 Red Team DARPA Grand Challenge Technical Paper Revision: 6.1 Submitted for Public Release April 8, 2004 Team Leader: William Red L. Whittaker Email address: red@ri.cmu.edu Mailing address: Carnegie Mellon
Red Team DARPA Grand Challenge Technical Paper Revision: 6.1 Submitted for Public Release April 8, 2004 Team Leader: William Red L. Whittaker Email address: red@ri.cmu.edu Mailing address: Carnegie Mellon
UNIVERSITÉ DE MONCTON FACULTÉ D INGÉNIERIE. Moncton, NB, Canada PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY
 FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
Improved Traversal for Planetary Rovers through Forward Acquisition of Terrain Trafficability
 Improved Traversal for Planetary Rovers through Forward Acquisition of Terrain Trafficability Planetary Rovers Workshop, ICRA 2013 Yashodhan Nevatia Space Applications Services May, 9th 2013 Co-authors
Improved Traversal for Planetary Rovers through Forward Acquisition of Terrain Trafficability Planetary Rovers Workshop, ICRA 2013 Yashodhan Nevatia Space Applications Services May, 9th 2013 Co-authors
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
RIMRES: A project summary
 RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
Phoenix Lander Implications on in situ resource utilization for robotic exploration of Mars
 Phoenix Landing Site May 2008 Phoenix Lander Implications on in situ resource utilization for robotic exploration of Mars LEAG-ICEUM-SRR (2008) Cape Canaveral, FL Robert L. Ash October 29, 2008 Aerospace
Phoenix Landing Site May 2008 Phoenix Lander Implications on in situ resource utilization for robotic exploration of Mars LEAG-ICEUM-SRR (2008) Cape Canaveral, FL Robert L. Ash October 29, 2008 Aerospace
Next Steps in Human Exploration: Cislunar Systems and Architectures
 Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Marine Robotics. Alfredo Martins. Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016
 Marine Robotics Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016 INESC TEC / ISEP Portugal alfredo.martins@inesctec.pt Multiple autonomous vehicles at sea 2 Multiple coordinated
Marine Robotics Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016 INESC TEC / ISEP Portugal alfredo.martins@inesctec.pt Multiple autonomous vehicles at sea 2 Multiple coordinated
Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers
 Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers Kojiro Iizuka and Takashi Kubota 2 International Young Researchers Empowerment Center, Shinshu University, iizuka@shinshu-u.ac.jp 2
Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers Kojiro Iizuka and Takashi Kubota 2 International Young Researchers Empowerment Center, Shinshu University, iizuka@shinshu-u.ac.jp 2
Mars 2018 Mission Status and Sample Acquisition Issues
 Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
LUNAR INDUSTRIAL RESEARCH BASE. Yuzhnoye SDO proprietary
 LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
DYNAMIC SIMULATION OF MARS-03 ENTRY, DESCENT AND LANDING SYSTEM
 DYNAMIC SIMULATION OF MARS-03 ENTRY, DESCENT AND LANDING SYSTEM Chia-Yen Peng and Walter Tsuha Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive Pasadena, CA 91109 ABSTRACT.
DYNAMIC SIMULATION OF MARS-03 ENTRY, DESCENT AND LANDING SYSTEM Chia-Yen Peng and Walter Tsuha Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive Pasadena, CA 91109 ABSTRACT.
Ironless Core DC Motors for Aerospace
 Ironless Core DC Motors for Aerospace Market segments covered by AS/EN9100 Support equipment Space shuttle & re entry vehicles Aviation Commercial passenger aircraft Light aircraft Cabin equipment Science
Ironless Core DC Motors for Aerospace Market segments covered by AS/EN9100 Support equipment Space shuttle & re entry vehicles Aviation Commercial passenger aircraft Light aircraft Cabin equipment Science
Coupled Aero-Structural Modelling and Optimisation of Deployable Mars Aero-Decelerators
 Coupled Aero-Structural Modelling and Optimisation of Deployable Mars Aero-Decelerators Lisa Peacocke, Paul Bruce and Matthew Santer International Planetary Probe Workshop 11-15 June 2018 Boulder, CO,
Coupled Aero-Structural Modelling and Optimisation of Deployable Mars Aero-Decelerators Lisa Peacocke, Paul Bruce and Matthew Santer International Planetary Probe Workshop 11-15 June 2018 Boulder, CO,
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Development of Legged, Wheeled, and Hybrid Rover Mobility Models to Facilitate Planetary Surface Exploration Mission Analysis
 Development of Legged, Wheeled, and Hybrid Rover Mobility Models to Facilitate Planetary Surface Exploration Mission Analysis by Scott H. McCloskey B.S., Aerospace Engineering University of Arizona, 2005
Development of Legged, Wheeled, and Hybrid Rover Mobility Models to Facilitate Planetary Surface Exploration Mission Analysis by Scott H. McCloskey B.S., Aerospace Engineering University of Arizona, 2005
THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA.
 GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
Resource Prospector Traverse Planning
 Resource Prospector Traverse Planning Jennifer Heldmann (NASA Ames / NASA Headquarters) Anthony Colaprete (NASA Ames Research Center) Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters)
Resource Prospector Traverse Planning Jennifer Heldmann (NASA Ames / NASA Headquarters) Anthony Colaprete (NASA Ames Research Center) Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters)
Leveraging AI for Self-Driving Cars at GM. Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel
 Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
Unmanned autonomous vehicles in air land and sea
 based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
Sophisticated Mapping for Increasing Railway Capacity
 Sophisticated Mapping for Increasing Railway Capacity April 17, 2012 Engineering Architecture Design-Build Surveying GeoSpatial Solutions Workshop Agenda Introductions Corporate Overview Market Drivers
Sophisticated Mapping for Increasing Railway Capacity April 17, 2012 Engineering Architecture Design-Build Surveying GeoSpatial Solutions Workshop Agenda Introductions Corporate Overview Market Drivers
IMAGING LIDAR TECHNOLOGY Development of a 3D-LIDAR Elegant Breadboard for Rendezvous & Docking, Test Results, Prospect to Future Sensor Application
 B. Moebius Jena-Optronik/ Germany, M. Pfennigbauer Riegl Measurement Systems/ Austria, J. Pereira do Carmo ESTEC/ The Netherlands IMAGING LIDAR TECHNOLOGY Development of a 3D-LIDAR Elegant Breadboard for
B. Moebius Jena-Optronik/ Germany, M. Pfennigbauer Riegl Measurement Systems/ Austria, J. Pereira do Carmo ESTEC/ The Netherlands IMAGING LIDAR TECHNOLOGY Development of a 3D-LIDAR Elegant Breadboard for
Suborbital Flight Opportunities for Cubesat-Class Experiments Aboard NLV Test Flights
 Suborbital Flight Opportunities for Cubesat-Class Experiments Aboard NLV Test Flights Christopher Bostwick John Garvey Garvey Spacecraft 9th ANNUAL CUBESAT DEVELOPERS WORKSHOP April 18-20, 2012 Cal Poly
Suborbital Flight Opportunities for Cubesat-Class Experiments Aboard NLV Test Flights Christopher Bostwick John Garvey Garvey Spacecraft 9th ANNUAL CUBESAT DEVELOPERS WORKSHOP April 18-20, 2012 Cal Poly
Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing
 Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing Therese Griebel NASA Glenn Research Center 1 Overview Current developments in technology that could meet NASA, DOD and commercial
Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing Therese Griebel NASA Glenn Research Center 1 Overview Current developments in technology that could meet NASA, DOD and commercial
Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon
 , Germany Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori
, Germany Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori
ORYX 2.0: Joseph L. Amato Jon J. Anderson Thomas J. Carlone. Michael E. Fagan
 ORYX 2.0: A Planetary Exploration Mobility Platform A Major Qualifying Project Report submitted to the Faculty of WORCESTER POLYTECHNIC INSTITUTE in partial fulfilment of the requirements for the Degree
ORYX 2.0: A Planetary Exploration Mobility Platform A Major Qualifying Project Report submitted to the Faculty of WORCESTER POLYTECHNIC INSTITUTE in partial fulfilment of the requirements for the Degree
Low Power Mobility System for Micro Planetary Rover Micro5
 i-sairas 99, ESTEC, Noordwijk, The Netherlands, June 1-3 1999 Low Power Mobility System for Micro Planetary Rover Micro5 Yoji KURODA*, Koji KONDO*, Kazuaki NAKAMURA*, Yasuharu KUNII**, and Takashi KUBOTA***
i-sairas 99, ESTEC, Noordwijk, The Netherlands, June 1-3 1999 Low Power Mobility System for Micro Planetary Rover Micro5 Yoji KURODA*, Koji KONDO*, Kazuaki NAKAMURA*, Yasuharu KUNII**, and Takashi KUBOTA***
In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led
 was founded by current company President Alexander Zakharov, since then he has led") A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
Canadian Lunar & Planetary Rover. Development
 Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
MEMS Sensors for automotive safety. Marc OSAJDA, NXP Semiconductors
 MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
University of Michigan s Work Toward Autonomous Cars
 University of Michigan s Work Toward Autonomous Cars RYAN EUSTICE NAVAL ARCHITECTURE & MARINE ENGINEERING MECHANICAL ENGINEERING, AND COMPUTER SCIENCE AND ENGINEERING Roadmap Why automated driving? Next
University of Michigan s Work Toward Autonomous Cars RYAN EUSTICE NAVAL ARCHITECTURE & MARINE ENGINEERING MECHANICAL ENGINEERING, AND COMPUTER SCIENCE AND ENGINEERING Roadmap Why automated driving? Next
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS
 MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
Small UAV A French MoD perspective and planning
 Small UAV A French MoD perspective and planning French ISTAR segmentation portable transportable infrastructure System volume Tactical Small UAV Contact Combat Helicopters (MTI) Fighter Aircrafts Land
Small UAV A French MoD perspective and planning French ISTAR segmentation portable transportable infrastructure System volume Tactical Small UAV Contact Combat Helicopters (MTI) Fighter Aircrafts Land
The Design of an Omnidirectional All-Terrain Rover Chassis
 The Design of an Omnidirectional All-Terrain Rover Chassis Abstract Submission for TePRA 2011: the 3rd Annual IEEE International Conference on Technologies for Practical Robot Applications Timothy C. Lexen,
The Design of an Omnidirectional All-Terrain Rover Chassis Abstract Submission for TePRA 2011: the 3rd Annual IEEE International Conference on Technologies for Practical Robot Applications Timothy C. Lexen,
SOLERO: SOLAR-POWERED EXPLORATION ROVER
 SOLERO: SOLAR-POWERED EXPLORATION ROVER S.Michaud (1), A. Schneider (2), R.Bertrand (2), P.Lamon (1), R.Siegwart (1), M. Van Winnendael (3), A. Schiele (3) 1 Autonomous Systems Lab, Swiss Federal Institute
SOLERO: SOLAR-POWERED EXPLORATION ROVER S.Michaud (1), A. Schneider (2), R.Bertrand (2), P.Lamon (1), R.Siegwart (1), M. Van Winnendael (3), A. Schiele (3) 1 Autonomous Systems Lab, Swiss Federal Institute
Deep Learning Will Make Truly Self-Driving Cars a Reality
 Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return
 Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
Europa Lander. Mission Concept Update 3/29/2017
 Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
Automated Driving: Design and Verify Perception Systems
 Automated Driving: Design and Verify Perception Systems Giuseppe Ridinò 2015 The MathWorks, Inc. 1 Some common questions from automated driving engineers 1011010101010100101001 0101010100100001010101 0010101001010100101010
Automated Driving: Design and Verify Perception Systems Giuseppe Ridinò 2015 The MathWorks, Inc. 1 Some common questions from automated driving engineers 1011010101010100101001 0101010100100001010101 0010101001010100101010
Human Exploration of the Lunar Surface
 International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics: Results and Roadmaps
 National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
Over-Snow Rovers for Polar Science Campaigns
 Over-Snow Rovers for Polar Science Campaigns J.H. Lever 1, L.E. Ray 2, A.M. Morlock 2, A.M. Burzynski 1, R.M. Williams 2 1 Cold Regions Research and Engineering Laboratory, Hanover, NH 2 Thayer School
Over-Snow Rovers for Polar Science Campaigns J.H. Lever 1, L.E. Ray 2, A.M. Morlock 2, A.M. Burzynski 1, R.M. Williams 2 1 Cold Regions Research and Engineering Laboratory, Hanover, NH 2 Thayer School
The Mobility System Wheel Design for NASA s Mars Science Laboratory Mission
 The Mobility System Wheel Design for NASA s Mars Science Laboratory Mission S. Haggart; J. Waydo Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA, USA 1. Abstract / Introduction
The Mobility System Wheel Design for NASA s Mars Science Laboratory Mission S. Haggart; J. Waydo Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA, USA 1. Abstract / Introduction
Towards Realizing Autonomous Driving Based on Distributed Decision Making for Complex Urban Environments
 Towards Realizing Autonomous Driving Based on Distributed Decision Making for Complex Urban Environments M.Sc. Elif Eryilmaz on behalf of Prof. Dr. Dr. h.c. Sahin Albayrak Digital Mobility Our vision Intelligent
Towards Realizing Autonomous Driving Based on Distributed Decision Making for Complex Urban Environments M.Sc. Elif Eryilmaz on behalf of Prof. Dr. Dr. h.c. Sahin Albayrak Digital Mobility Our vision Intelligent
UAV Magnetometry for Mineral Exploration
 UAV Magnetometry for Mineral Exploration Case Study: Île Calumet, QC JC Ricard, CEO Devbrio Géophysique C. Mercier, Jr. Eng. J. Blanchard, M.Sc. Geophysics Devbrio UAV magnetometer 1 Developed by Devbrio
UAV Magnetometry for Mineral Exploration Case Study: Île Calumet, QC JC Ricard, CEO Devbrio Géophysique C. Mercier, Jr. Eng. J. Blanchard, M.Sc. Geophysics Devbrio UAV magnetometer 1 Developed by Devbrio