Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return
|
|
|
- Tiffany Wells
- 6 years ago
- Views:
Transcription

1 Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011
2 Contents Scope Introduction The SFR mission Concept SFR and the MSR Mission Architecture SFR Mission Operational Baseline Rover System Design Drivers Rover Design Philosophies Selected System concepts: Mobility Locomotion System GNC Baseline Down-Selection Conclusion & Wrap-up -2
3 Scope Introduce the SFR mission concept, design drivers and mass reduction philosophies Concentrate on Mobility issues and first preliminary concepts Introduction Study objectives To carry out an assessment study of a lightweight rover for fetching cached samples on Mars and return them to a Mars Ascent Vehicle (MAV). Challenges Very stringent mass constraints: target 60 kg, (ExoMars is ~ 300kg) Compact 1 x 1 x 0.7m stowed envelope Must traverse 15 km in 180 sols mission Design Highlight interleaved aspects of environmental and operational requirements Identify and thoroughly understand of ripple effects through the subsystems design. Identify enabling technologies and future developments -3




















4 Introduction - The Team -4
5 MSR Mission Architecture NASA/ESA Joint Mars Exploration Programme The caching rover will collect and deposit a sample cache onto the Martian surface to be collected by SFR

6 MSR Mission Architecture Baseline Architecture : MAV and SFR deployed together Rover begins operations in September 2025 Ls 133 NASA concept allocates 150 kg to a single purpose fetch rover The rover shall fit in a 1 x 1 x 0.7 m envelope to transfer to Mars Need to investigate alternative deployment concepts in case of MAV mass growth ( ESA Mars Precision Lander) NASA -6


7 Mission Operational Baseline Mission Nominal Operational Scenario : Navigate and traverse to the location of a sample cache deposited by a previous rover mission Retrieve the sample cache Deliver it to the MSR Ascent Vehicle and cooperate in transferring the sample cache to the MSR lander A compressed mission timeline : 180 sol mission Accounting for post landing operations, checkouts and dust storm contingencies Only 125 sols remaining for egress Minimum traverse of 120m/sol for a 6-month mission If mission is to be done before the dust season ~170m/sol MAX-C End MSR Lander Cache MAX-C Start Traverse Distance = 14 km straight line -7
8 Mission Environment Environment Similar to ExoMars/Caching Rover Same location, however Mission operation from Ls 133 to 212 shortly before Dust season Different illumination conditions and thermal environment Terrain Conditions At worst, SFR should be compatible with ExoMars terrain, At best, the cache is deposited in a more benign location (fewer/smaller rocks and slopes, better characterised terrain, etc) -8
9 SFR Rover - Rover System Design Drivers - -9
10 Rover System Design Drivers The SFR design presents significant challenges in the areas of Mass : Target mass for the rover platform is 60 kg - 1/5 Exomars The four major contributors to mass (90%) are locomotion, structure, power and harness. Data Handling Communication Power Harness Structure Performance : Accumulated ground track of at least 15km Nominal 180 sol mission baseline 125 sol traverse SFR highly dependent on robust mobility system. Thermal Control Deployable Mast Navigation Locomotion Risk : Overall MSR mission architecture high degree of risk. No Rover return No samples -10
11 Rover System Design Drivers SFR Design Drivers, Dependencies and Ultimate Impact on Mass -11
12 Approaches to Design Evolution Solution Type Heritage Modified Alternative Radical Displacement Approach Optimise existing Altered heritage solution New development Same functions Thinking out of the box Remove the need for a solution Comments / issues Optimisation of heritage Low risk / high confidence Good retention of TRL Based on heritage item medium uncertainty / risk Same functions but re-development from scratch Design needs validation and qualification Novel architecture & technology Innovative & ground breaking Full Validation and qualification reqd usually high risk Remove the need for the solution from the design Not usually practical severe loss of functionality -12


13 Proposed Rover Design Philosophies Stripped out approach Removes any mass that is not essential for the achievement of the major goals of the mission. Each element of the rover is pared down to its minimum required functionality/performance. Sub-systems can be de-scoped and performance traded to achieve a lower mass solution, but component redundancy must be maintained. Ready-To-Go Seeks to remove any deployments or mechanisms that are not essential i.e. utilisation of fixed solar arrays, fixed mast, no wheel deployment etc. This approach removes rover complexity reducing risk during the commissioning phase. The gain of removing mechanisms must be carefully traded against the impact on performance and the reciprocal effects on the system design. E.g. a rover with a fixed solar panel may have a small total array size due to the constraints imposed by the lander. -13



14 Proposed Rover Design Philosophies Cold Skeleton The rover is stripped down to it fundamental structures and uses minimum thermal control to save structure mass and packaging Involves the use of cold electronics and mechanisms Limited by battery temperature requirements Locomotion Optimisation The design is driven by the optimisation of the locomotion system. Potential to alleviate GNC load Rover is designed around the Locomotion Sub-System ensuring mobility is not compromised at any stage in the design. -14

15 Proposed Rover Design Philosophies 24/7 Rover Not Possible A perpetual power supply the rover Achieved by a power system not constrained by solar flux such as RTG and SRG But Very low TRL and energy density of current radioisotopes too low for small rovers The SFR Mission currently baselines photovoltaics Day Rover Not Possible The rover only operates during daylight and only from the power of the solar arrays No battery Some mass saving and lower thermal requirements as per Cold skeleton But Mission requires a night communication window -15
16 SFR Rover - Locomotion Sub-System - -16
17 Locomotion Overview Terrain topography and its physical properties play a critical role in the design and performance of the LSS The soil properties - rover slope traverse capability, power requirements, grousers size, number of wheels. Size of the rocks - design of the suspension system, the wheel size, power requirements. Rock distribution - mean free path of the rover which influences GNC. Slope - minimum gradeability, the static stability of the rover and power requirements. -17



18 Locomotion System Options Extensive locomotion system concepts review 20 configurations 4,5,6,8 wheels Preliminary trade-off: Mechanical and actuation complexity, Ground clearance Redundancy, Risk and TRL, Stowage and deployment,. Wheel Types and Constructions Rigid Semi-rigid Flexible NASA AMSTL NASA -18

19 Locomotion System Candidates Heritage and redundancy 6WD 3 bogies Simpler, lower mass 4WD +diff Lowest mass, Lowest TRL 4WD -19
20 SFR Rover Concepts and Trade-Offs - Guidance Navigation and Control - -20
21 GNC Sub-System Functional specification Key to rapid traverse (15km-120m/sol) However Unlike past missions a wealth of local terrain data will be potentially available to the platform Key design drivers -21
 SLAM and Obstacle Avoidance Continuous Drive Set off in the target direction and avoid obstacles along the way Can")
22 GNC Sub-System Navigation Options: Stop-Go Stop to image the way ahead and process the data to derive a safe path Used on MER and ExoMars Requires heavy processing, Provide careful path planning and dead-reckoning Holds up the progress of the traverse (Processing power limitations) SLAM and Obstacle Avoidance Continuous Drive Set off in the target direction and avoid obstacles along the way Can be time (and therefore power) inefficient as the navigation seeks a path continuously through obstacles -22
23 GNC Sub-System An alternative Navigation Concept: Hybrid Architecture Current missions are relying on direct-drive with some operational autonomy for obstacle avoidance In the timeframe of SFR Wealth of data gathered of the ExoMars and MSR landing sites Unprecedented opportunity to perform a preliminary route mapping to the cache Obital imagery, altimetry and shape from shading may identify obstacles - HiRISE already provides 0.3m pixel sizes on the ground It is possible to envisage that high resolution digital terrain models (DTM) will be available -23
24 GNC Sub-System GNC architecture Using High res DTMs Localisation: Visual feature matching Navigation and Path planning: - Identification of all the main obstacles in the path large scale nav map (uploaded in manageable chunks. However, specific terrain data such as the soil condition will be missing. On-board replanning required to find altrenative path. Control: The DTM could be used in conjunction of the Structure from Motion techniques to improve the control and accuracy of the rover along the prescribed path. -24
25 SFR Rover - Baseline Downselection - -25
26 Baseline Candidates - Discussion Candidates mass comparison The concepts range from ~72kg (4WD_diff) to ~79kg (Exomars based, flexi wheels) Mainly relates to mass savings in: Locomotion System OBDH mass reduction scheme However: Not as large a difference as initially anticipated Limited by Power sub-system and Solar Array Size and deployment Structure Mass 80 SFR Baseline Candidates Mass 78 Mass [kg] ExoLight ExoEvo 4WD_diff 4WD_XLW_300 4WD_XLW_400-26

 1.")



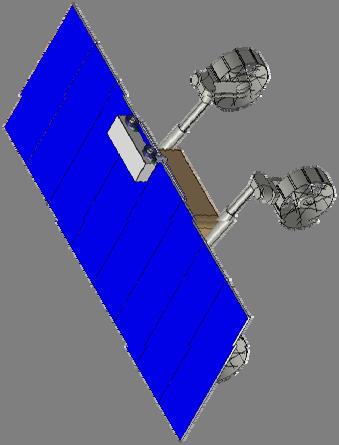
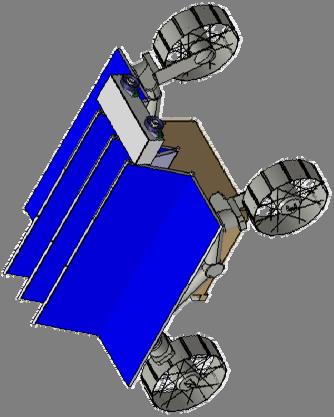
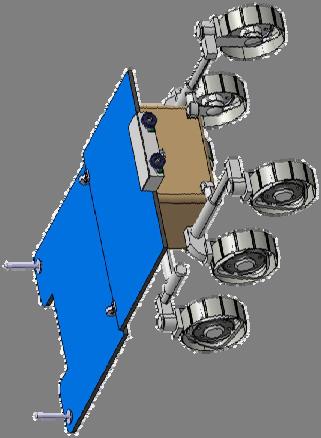
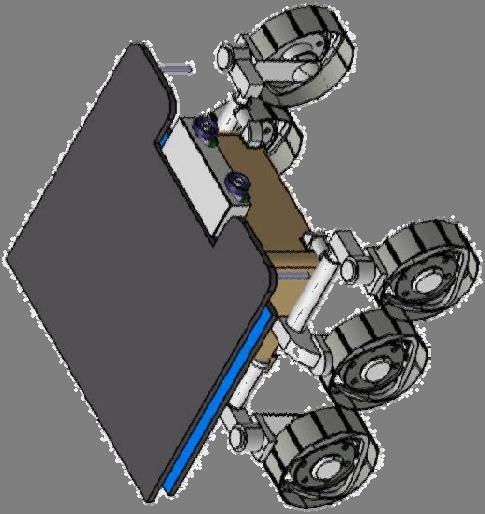
27 Preliminary Baseline Based on Trade-off exercise, a 6WD 3 bogies configuration selected Higher redundancy than 4WD concepts Heritage in a smaller package evolution of the ExoMars configuration (not necessarily implementation) 1.4m2 array (configuration TBC) Large area in the front for Cache Acquisition System Stowed envelope fits into the allowable volume Footprint deployed 1500x1000mm ~75kg (with 300mm spoke/mesh wheels) However: Mass > target of ~60kg, but will be optimised in next phase Alternative locomotion formula and their performance will be investigated i.e. from 6x6x6 down to 6x4x4 Wheel construction and dimensions TBC Rigid Vs flexible, mm Innovative lightweight solutions for collateral systems to be investigated e.g. OBDH, Comms, Power -27
28 SFR Rover Concepts and Trade-Offs - Conclusion & Wrap-up - -28
29 Conclusion This activity is looking at a wide range of architecture, system and sub-system options for the Sample Fetch Rover Mobility subsystem critical to mission success Based on the current mission constraints and following this preliminary review and trades: None of the concepts proposed currently fit into the 60kg target mass envelope (~75kg). Preliminary analysis showed that it is difficult to drastically reduce the mass of the main mass drivers further, but other system may be optimised Rover must be compatible with ExoMars environment drives locomotion and power systems The preliminary rover concept draws on heritage, but leaves open a number of options for actual implementation The next phase Will see further definition and mass optimisation of the rover subsystems Careful evaluation of GNC scheme and Locomotion system sizing. Preliminary design of the rover concept -29
30 Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T. Jorden, N.Patel, A. Ratcliffe ASTRA 2011 ESTEC 14 April 2011
From MARS To MOON. V. Giorgio Director of Italian Programs. Sorrento, October, All rights reserved, 2007, Thales Alenia Space
 From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
The European Lunar Lander Mission
 The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
NEXT Exploration Science and Technology Mission. Relevance for Lunar Exploration
 NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
European Lunar Lander: System Engineering Approach
 human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012
 Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity
 The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
Mars 2018 Mission Status and Sample Acquisition Issues
 Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
Chassis Concepts for the ExoMars Rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science
 Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Long-Range Rovers for Mars Exploration and Sample Return
 2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
Innovative Mars exploration rover using inflatable or unfolding wheels
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems
 www.dlr.de\rm Chart 1 > ASTRA 2013 - Pan/Tilt-Unit as a Perception Module 16.05.2013 Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems DLR-RMC Robotic and Mechatronic
www.dlr.de\rm Chart 1 > ASTRA 2013 - Pan/Tilt-Unit as a Perception Module 16.05.2013 Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems DLR-RMC Robotic and Mechatronic
Human Exploration of the Lunar Surface
 International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
Improved Traversal for Planetary Rovers through Forward Acquisition of Terrain Trafficability
 Improved Traversal for Planetary Rovers through Forward Acquisition of Terrain Trafficability Planetary Rovers Workshop, ICRA 2013 Yashodhan Nevatia Space Applications Services May, 9th 2013 Co-authors
Improved Traversal for Planetary Rovers through Forward Acquisition of Terrain Trafficability Planetary Rovers Workshop, ICRA 2013 Yashodhan Nevatia Space Applications Services May, 9th 2013 Co-authors
An Overview of CSA s s Space Robotics Activities
 An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
AFG Project Update Spring 2006 Semester 02/15/2006
 AFG Project Update Spring 2006 Semester 02/15/2006 Proposal: Unmanned Ground Vehicle Alternative Energy and Sensors Research Under this research program, the recipient will design, build, and test the
AFG Project Update Spring 2006 Semester 02/15/2006 Proposal: Unmanned Ground Vehicle Alternative Energy and Sensors Research Under this research program, the recipient will design, build, and test the
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, GMT
 Friday, October 30, GMT") Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Lunar Architecture and LRO
 Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Light-Lift Rocket II
 Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
ITD Systems Core Partners Wave 04
 ITD Systems Core Partners Wave 04 JTI-CS2-2016-CPW04-SYS Innovation Takes Off Not legally binding Network Solutions for future cockpit communications General Information Key information Topic: Networking
ITD Systems Core Partners Wave 04 JTI-CS2-2016-CPW04-SYS Innovation Takes Off Not legally binding Network Solutions for future cockpit communications General Information Key information Topic: Networking
Europa Lander. Mission Concept Update 3/29/2017
 Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
Propeller Blade Bearings for Aircraft Open Rotor Engine
 NTN TECHNICAL REVIEW No.84(2016) [ New Product ] Guillaume LEFORT* The Propeller Blade Bearings for Open Rotor Engine SAGE2 were developed by NTN-SNR in the frame of the Clean Sky aerospace programme.
NTN TECHNICAL REVIEW No.84(2016) [ New Product ] Guillaume LEFORT* The Propeller Blade Bearings for Open Rotor Engine SAGE2 were developed by NTN-SNR in the frame of the Clean Sky aerospace programme.
Lunette: A Global Network of Small Lunar Landers
 Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
ASTRIUM. Lunar Lander Concept for LIFE. Hansjürgen Günther TOB 11. Bremen, 23/
 Lunar Lander Concept for LIFE Hansjürgen Günther TOB 11 Bremen, 23/24.11.2006 This document is the property of EADS SPACE. It shall not be communicated to third parties without prior written agreement.its
Lunar Lander Concept for LIFE Hansjürgen Günther TOB 11 Bremen, 23/24.11.2006 This document is the property of EADS SPACE. It shall not be communicated to third parties without prior written agreement.its
On the feasibility of a fast track return to Mars
 On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
Planetary Surface Transportation and Site Development
 Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
PRELIMINARY DESIGN REVIEW
 PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
Rocketry Projects Conducted at the University of Cincinnati
 Rocketry Projects Conducted at the University of Cincinnati 2009-2010 Grant Schaffner, Ph.D. (Advisor) Rob Charvat (Student) 17 September 2010 1 Spacecraft Design Course Objectives Students gain experience
Rocketry Projects Conducted at the University of Cincinnati 2009-2010 Grant Schaffner, Ph.D. (Advisor) Rob Charvat (Student) 17 September 2010 1 Spacecraft Design Course Objectives Students gain experience
RIMRES: A project summary
 RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
Mars Surface Mobility Proposal
 Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
Adrestia. A mission for humanity, designed in Delft. Challenge the future
 Adrestia A mission for humanity, designed in Delft 1 Adrestia Vision Statement: To inspire humanity by taking the next step towards setting a footprint on Mars Mission Statement Our goal is to design an
Adrestia A mission for humanity, designed in Delft 1 Adrestia Vision Statement: To inspire humanity by taking the next step towards setting a footprint on Mars Mission Statement Our goal is to design an
Canadian Lunar & Planetary Rover. Development
 Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Rover development status
 EXOMARS PROJECT 2018 Mission Rover development status ASTRA Workshop 15-17 May 2013 P. Baglioni & the EXM Rover Team Progress on the 2018 Mission Following EXM Program approvals from the Council and IPC
EXOMARS PROJECT 2018 Mission Rover development status ASTRA Workshop 15-17 May 2013 P. Baglioni & the EXM Rover Team Progress on the 2018 Mission Following EXM Program approvals from the Council and IPC
SPARTAN. Date: All rights reserved 2011, Thales Alenia Space. Business Unit Space Infrastructures & Transportation
 SPARTAN Date: Business Unit Space Infrastructures & Transportation February the 17 2011 All rights reserved 2011, Thales Alenia Space Project Overview 2 From 3 rd Fp7 Space Call Grant Agreement n. 262837
SPARTAN Date: Business Unit Space Infrastructures & Transportation February the 17 2011 All rights reserved 2011, Thales Alenia Space Project Overview 2 From 3 rd Fp7 Space Call Grant Agreement n. 262837
Development of Legged, Wheeled, and Hybrid Rover Mobility Models to Facilitate Planetary Surface Exploration Mission Analysis
 Development of Legged, Wheeled, and Hybrid Rover Mobility Models to Facilitate Planetary Surface Exploration Mission Analysis by Scott H. McCloskey B.S., Aerospace Engineering University of Arizona, 2005
Development of Legged, Wheeled, and Hybrid Rover Mobility Models to Facilitate Planetary Surface Exploration Mission Analysis by Scott H. McCloskey B.S., Aerospace Engineering University of Arizona, 2005
Challenges of Designing the MarsNEXT Network
 Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Approach for determining WLTPbased targets for the EU CO 2 Regulation for Light Duty Vehicles
 Approach for determining WLTPbased targets for the EU CO 2 Regulation for Light Duty Vehicles Brussels, 17 May 2013 richard.smokers@tno.nl norbert.ligterink@tno.nl alessandro.marotta@jrc.ec.europa.eu Summary
Approach for determining WLTPbased targets for the EU CO 2 Regulation for Light Duty Vehicles Brussels, 17 May 2013 richard.smokers@tno.nl norbert.ligterink@tno.nl alessandro.marotta@jrc.ec.europa.eu Summary
Heavy Duty Vehicles - Land
 Heavy Duty Vehicles - Land #ETI10 Welcome and Introduction HDV Project Manager David Butler Agenda Introduction and welcome Programme overview High Efficiency Selective Catalytic Reduction Project Heavy
Heavy Duty Vehicles - Land #ETI10 Welcome and Introduction HDV Project Manager David Butler Agenda Introduction and welcome Programme overview High Efficiency Selective Catalytic Reduction Project Heavy
Research Brief. Simulation and verification of results from 125mph current collection modelling for two pantographs. T841 - January 2011.
 Research Brief Simulation and verification of results from 125mph current collection modelling for two pantographs Overview On behalf of the Vehicle / Train Energy System Interface Committee (V/TE SIC),
Research Brief Simulation and verification of results from 125mph current collection modelling for two pantographs Overview On behalf of the Vehicle / Train Energy System Interface Committee (V/TE SIC),
Space Robotics Planetary Exploration - a DLR Perspective
 Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Development of the ExoMars Chassis and Locomotion Subsystem
 Development of the ExoMars Chassis and Locomotion Subsystem S. Michaud (1), A. Gibbesch (2), T. Thueer (3), A. Krebs (3), C. Lee (4), B. Despont (1), B. Schäfer (2), R. Slade (5) (1) Oerlikon Space AG
Development of the ExoMars Chassis and Locomotion Subsystem S. Michaud (1), A. Gibbesch (2), T. Thueer (3), A. Krebs (3), C. Lee (4), B. Despont (1), B. Schäfer (2), R. Slade (5) (1) Oerlikon Space AG
Photovoltaic Assemblies For The Power Generation Of The Exomars Missions
 E3S Web of Conferences 16, 04002 (2017) Photovoltaic Assemblies For The Generation Of The Exomars Missions Emanuele Ferrando (1), Pietro Zanella (1), Stefano Riva (1), Giulia Damonte (1), Romano Romani
E3S Web of Conferences 16, 04002 (2017) Photovoltaic Assemblies For The Generation Of The Exomars Missions Emanuele Ferrando (1), Pietro Zanella (1), Stefano Riva (1), Giulia Damonte (1), Romano Romani
Critical Chain Project Management (CCPM)
") Critical Chain Project Management (CCPM) Sharing of concepts and deployment strategy Ashok Muthuswamy April 2018 1 Objectives Why did we implement CCPM at Tata Chemicals? Provide an idea of CCPM, its concepts
Critical Chain Project Management (CCPM) Sharing of concepts and deployment strategy Ashok Muthuswamy April 2018 1 Objectives Why did we implement CCPM at Tata Chemicals? Provide an idea of CCPM, its concepts
EUROBOT EVA-assistant robot for ISS
 In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 EUROBOT EVA-assistant robot for
In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 EUROBOT EVA-assistant robot for
Heat Shield Design Project
 Name Class Period Heat Shield Design Project The heat shield is such a critical piece, not just for the Orion mission, but for our plans to send humans into deep space. Final Points Earned Class Participation/Effort
Name Class Period Heat Shield Design Project The heat shield is such a critical piece, not just for the Orion mission, but for our plans to send humans into deep space. Final Points Earned Class Participation/Effort
An Integrated Process for FDIR Design in Aerospace
 An Integrated Process for FDIR Design in Aerospace Fondazione Bruno Kessler, Trento, Italy Benjamin Bittner, Marco Bozzano, Alessandro Cimatti, Marco Gario Thales Alenia Space,France Regis de Ferluc Thales
An Integrated Process for FDIR Design in Aerospace Fondazione Bruno Kessler, Trento, Italy Benjamin Bittner, Marco Bozzano, Alessandro Cimatti, Marco Gario Thales Alenia Space,France Regis de Ferluc Thales
CALL FOR IDEAS FOR THE RE-USE OF THE MARS EXPRESS PLATFORM PLATFORM CAPABILITIES. D. McCoy
 Mars Express Reuse: Call for Ideas CALL FOR IDEAS FOR THE RE-USE OF THE MARS EXPRESS PLATFORM PLATFORM CAPABILITIES D. McCoy PARIS 23 MARCH 2001 page 1 Mars Express Reuse: Call for Ideas PRESENTATION CONTENTS
Mars Express Reuse: Call for Ideas CALL FOR IDEAS FOR THE RE-USE OF THE MARS EXPRESS PLATFORM PLATFORM CAPABILITIES D. McCoy PARIS 23 MARCH 2001 page 1 Mars Express Reuse: Call for Ideas PRESENTATION CONTENTS
Exomars Orbiter Module Bus OMB
 Exomars Orbiter Module Bus OMB TAS-F 23rd Sept 2010 Exomars Industrial day- Turin 1 Exomars OMB definition Exomars OMB will: serve as a carrier to deliver the EDM at the right landing latitude in the 2016
Exomars Orbiter Module Bus OMB TAS-F 23rd Sept 2010 Exomars Industrial day- Turin 1 Exomars OMB definition Exomars OMB will: serve as a carrier to deliver the EDM at the right landing latitude in the 2016
Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics.
 Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics. http://dx.doi.org/10.3991/ijoe.v11i6.5033 Matthew Bastin* and R Peter
Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics. http://dx.doi.org/10.3991/ijoe.v11i6.5033 Matthew Bastin* and R Peter
Development of an Extended Range, Large Caliber, Modular Payload Projectile
 1 Development of an Extended Range, Large Caliber, Modular Payload Projectile April 12th, 2011 Miami, Florida, USA 46 th Annual Gun & Missile Systems Conference & Exhibition Speaker: Pierre-Antoine Rainville
1 Development of an Extended Range, Large Caliber, Modular Payload Projectile April 12th, 2011 Miami, Florida, USA 46 th Annual Gun & Missile Systems Conference & Exhibition Speaker: Pierre-Antoine Rainville
lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow
 lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow John Connolly Lunar Lander Project Office 1 Components of Program Constellation Earth Departure Stage Ares V - Heavy
lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow John Connolly Lunar Lander Project Office 1 Components of Program Constellation Earth Departure Stage Ares V - Heavy
Landing Targets and Technical Subjects for SELENE-2
 Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Reference Science Scenario for SDT Report
 MARS 2007 SMART LANDER Reference Science Scenario for SDT Report 9/17/01 Jennifer Mindock Leslie Tamppari Daniel Limonadi Sue Smrekar Reference Mission Big Picture Total duration of mission = 180 sols
MARS 2007 SMART LANDER Reference Science Scenario for SDT Report 9/17/01 Jennifer Mindock Leslie Tamppari Daniel Limonadi Sue Smrekar Reference Mission Big Picture Total duration of mission = 180 sols
NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration
 National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
BATTERY FOR EXTENDED TEMPERATURE RANGE EXOMARS ROVER MISSION
 BATTERY FOR EXTENDED TEMPERATURE RANGE EXOMARS ROVER MISSION Steve AMOS (1), Paul BROCHARD (2) (1) AIRBUS Defence and Space, Gunnels Wood Road, Stevenage United Kingdom, Email: stephen.amos@airbus.com
BATTERY FOR EXTENDED TEMPERATURE RANGE EXOMARS ROVER MISSION Steve AMOS (1), Paul BROCHARD (2) (1) AIRBUS Defence and Space, Gunnels Wood Road, Stevenage United Kingdom, Email: stephen.amos@airbus.com
EPIC Workshop 2017 SES Perspective on Electric Propulsion
 EPIC Workshop 2017 SES Perspective on Electric Propulsion PRESENTED BY Eric Kruch PRESENTED ON 24 October 2017 SES Proprietary SES Perspective on Electric Propulsion Agenda 1 Electric propulsion at SES
EPIC Workshop 2017 SES Perspective on Electric Propulsion PRESENTED BY Eric Kruch PRESENTED ON 24 October 2017 SES Proprietary SES Perspective on Electric Propulsion Agenda 1 Electric propulsion at SES
Next Steps in Human Exploration: Cislunar Systems and Architectures
 Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES
 FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
Test & Validation Challenges Facing ADAS and CAV
 Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
A NOVEL IN-FLIGHT SPACE BATTERY HEALTH ASSESSMENT SYSTEM Brandon Buergler (1), François Bausier (1)
, François Bausier (1)") A NOVEL IN-FLIGHT SPACE BATTERY HEALTH ASSESSMENT SYSTEM Brandon Buergler (1), François Bausier (1) (1) ESA-ESTEC, Keplerlaan 1, 2200 AG Noordwijk, NL, Email: brandon.buergler@esa.int, francois.bausier@esa.int
A NOVEL IN-FLIGHT SPACE BATTERY HEALTH ASSESSMENT SYSTEM Brandon Buergler (1), François Bausier (1) (1) ESA-ESTEC, Keplerlaan 1, 2200 AG Noordwijk, NL, Email: brandon.buergler@esa.int, francois.bausier@esa.int
Mobile Payload Element (MPE)
") Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
Variable Valve Drive From the Concept to Series Approval
 Variable Valve Drive From the Concept to Series Approval New vehicles are subject to ever more stringent limits in consumption cycles and emissions. At the same time, requirements in terms of engine performance,
Variable Valve Drive From the Concept to Series Approval New vehicles are subject to ever more stringent limits in consumption cycles and emissions. At the same time, requirements in terms of engine performance,
ReachMars 2024 A Candidate Large-Scale Technology Demonstration Mission as a Precursor to Human Mars Exploration
 ReachMars 2024 A Candidate Large-Scale Technology Demonstration Mission as a Precursor to Human Mars Exploration 1 October 2014 Toronto, Canada Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
ReachMars 2024 A Candidate Large-Scale Technology Demonstration Mission as a Precursor to Human Mars Exploration 1 October 2014 Toronto, Canada Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
Bi-Axial Solar Array Drive Mechanism: Design, Build and Environmental Testing
 Bi-Axial Solar Array Drive Mechanism: Design, Build and Environmental Testing Noémy Scheidegger*, Mark Ferris* and Nigel Phillips * Abstract The development of the Bi-Axial Solar Array Drive Mechanism
Bi-Axial Solar Array Drive Mechanism: Design, Build and Environmental Testing Noémy Scheidegger*, Mark Ferris* and Nigel Phillips * Abstract The development of the Bi-Axial Solar Array Drive Mechanism
Resource Prospector Traverse Planning
 Resource Prospector Traverse Planning Jennifer Heldmann (NASA Ames / NASA Headquarters) Anthony Colaprete (NASA Ames Research Center) Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters)
Resource Prospector Traverse Planning Jennifer Heldmann (NASA Ames / NASA Headquarters) Anthony Colaprete (NASA Ames Research Center) Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters)
Venus Entry Options Venus Upper Atmosphere Investigations Science and Technical Interchange Meeting (STIM)
") Venus Entry Options Venus Upper Atmosphere Investigations Science and Technical Interchange Meeting (STIM) January 24, 2013 at the Ohio Aerospace Institute Peter Gage, Gary Allen, Dinesh Prabhu, Ethiraj
Venus Entry Options Venus Upper Atmosphere Investigations Science and Technical Interchange Meeting (STIM) January 24, 2013 at the Ohio Aerospace Institute Peter Gage, Gary Allen, Dinesh Prabhu, Ethiraj
Analysis of Power Storage Media for the Exploration of the Moon
 Analysis of Power Storage Media for the Exploration of the Moon Michael Loweth, Rachel Buckle ICEUM 9 22-26 th October 2007 ABSL Space Products 2005 2007 Servicing USA and the ROW UNITED KINGDOM Culham
Analysis of Power Storage Media for the Exploration of the Moon Michael Loweth, Rachel Buckle ICEUM 9 22-26 th October 2007 ABSL Space Products 2005 2007 Servicing USA and the ROW UNITED KINGDOM Culham
Sciences for Maneuver Campaign
 Mr. Eric Spero Sciences for Maneuver Campaign U.S. Army Research Laboratory Ground Air Sciences for Maneuver Campaign Science & Technology enabled air and ground platform capabilities to significantly
Mr. Eric Spero Sciences for Maneuver Campaign U.S. Army Research Laboratory Ground Air Sciences for Maneuver Campaign Science & Technology enabled air and ground platform capabilities to significantly
Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics: Results and Roadmaps
 National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
RIIO-T2 Energy Scenarios
 RIIO-T2 Load 20 th September 2018 RIIO-T2 Energy Scenarios 1 RIIO-T2 Energy Scenarios RIIO-T2 Context Jim Sutherland RIIO-T2 Project Director 2 The RIIO Framework Ofgem s framework for setting price controls
RIIO-T2 Load 20 th September 2018 RIIO-T2 Energy Scenarios 1 RIIO-T2 Energy Scenarios RIIO-T2 Context Jim Sutherland RIIO-T2 Project Director 2 The RIIO Framework Ofgem s framework for setting price controls
The Design of an Omnidirectional All-Terrain Rover Chassis
 The Design of an Omnidirectional All-Terrain Rover Chassis Abstract Submission for TePRA 2011: the 3rd Annual IEEE International Conference on Technologies for Practical Robot Applications Timothy C. Lexen,
The Design of an Omnidirectional All-Terrain Rover Chassis Abstract Submission for TePRA 2011: the 3rd Annual IEEE International Conference on Technologies for Practical Robot Applications Timothy C. Lexen,
Proposed Dounreay - Mybster 275 kv / 132 kv
 Background Scottish Hydro-Electric Transmission Ltd (SHETL) is proposing a new 275 kilovolt (kv) (1 kilovolt = 1000volts) double circuit overhead line (OHL) between the Dounreay sub station and the new
Background Scottish Hydro-Electric Transmission Ltd (SHETL) is proposing a new 275 kilovolt (kv) (1 kilovolt = 1000volts) double circuit overhead line (OHL) between the Dounreay sub station and the new
Robo$cs Mission Experience from Mars. Brian Wilcox Mark Maimone Andy Mishkin 5 August 2009
 Robo$cs Mission Experience from Mars Brian Wilcox Mark Maimone Andy Mishkin 5 August 2009 MER Mobility Hardware Wide FOV stereo HAZCAMs (front & rear) for on-board hazard detection Stereo NAVCAMS & PANCAMS
Robo$cs Mission Experience from Mars Brian Wilcox Mark Maimone Andy Mishkin 5 August 2009 MER Mobility Hardware Wide FOV stereo HAZCAMs (front & rear) for on-board hazard detection Stereo NAVCAMS & PANCAMS
A Systematic Approach to Weight Saving of Trailer Towing Systems at Land Rover
 A Systematic Approach to Weight Saving of Trailer Towing Systems at Land Rover 2015 UK Altair Technology Conference Andrew Blows Technical Specialist - BCAE Strength & Durability ablows@jaguarlandrover.com
A Systematic Approach to Weight Saving of Trailer Towing Systems at Land Rover 2015 UK Altair Technology Conference Andrew Blows Technical Specialist - BCAE Strength & Durability ablows@jaguarlandrover.com
Compatibility of STPA with GM System Safety Engineering Process. Padma Sundaram Dave Hartfelder
 Compatibility of STPA with GM System Safety Engineering Process Padma Sundaram Dave Hartfelder Table of Contents Introduction GM System Safety Engineering Process Overview Experience with STPA Evaluation
Compatibility of STPA with GM System Safety Engineering Process Padma Sundaram Dave Hartfelder Table of Contents Introduction GM System Safety Engineering Process Overview Experience with STPA Evaluation
Effect of Compressor Inlet Temperature on Cycle Performance for a Supercritical Carbon Dioxide Brayton Cycle
 The 6th International Supercritical CO2 Power Cycles Symposium March 27-29, 2018, Pittsburgh, Pennsylvania Effect of Compressor Inlet Temperature on Cycle Performance for a Supercritical Carbon Dioxide
The 6th International Supercritical CO2 Power Cycles Symposium March 27-29, 2018, Pittsburgh, Pennsylvania Effect of Compressor Inlet Temperature on Cycle Performance for a Supercritical Carbon Dioxide
Autonomous Sample Acquisition for the ExoMars Rover
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Autonomous Sample Acquisition for
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Autonomous Sample Acquisition for
Palamede, more than a microsatellite. Workshop on University Micro Satellites in Italy Rome, July 27, 2005
 Palamede, more than a microsatellite The Palamede Team (represented by Franco Bernelli and Roberto Armellin) Workshop on University Micro Satellites in Italy Rome, July 27, 2005 Outline Mission and educational
Palamede, more than a microsatellite The Palamede Team (represented by Franco Bernelli and Roberto Armellin) Workshop on University Micro Satellites in Italy Rome, July 27, 2005 Outline Mission and educational
THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS. Nagin Cox
 THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS Nagin Cox Jet Propulsion Laboratory National Air & Space Administration/California Institute of Technology Email: nagin@jpl.nasa.gov Abstract: Since
THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS Nagin Cox Jet Propulsion Laboratory National Air & Space Administration/California Institute of Technology Email: nagin@jpl.nasa.gov Abstract: Since
MARTIAN HABITAT DESIGN
 MARTIAN HABITAT DESIGN MARS OR BUST, INC. UNIVERSITY OF COLORADO, BOULDER AEROSPACE ENGINEERING SCIENCES ASEN 4158/5158 MOB DECEMBER 17, 2003 TABLE OF CONTENTS 1 MISSION SUMMARY... 8 1.1 CONTEXT OF THIS
MARTIAN HABITAT DESIGN MARS OR BUST, INC. UNIVERSITY OF COLORADO, BOULDER AEROSPACE ENGINEERING SCIENCES ASEN 4158/5158 MOB DECEMBER 17, 2003 TABLE OF CONTENTS 1 MISSION SUMMARY... 8 1.1 CONTEXT OF THIS
Dr Mark White Chief Engineer, Body Complete, Jaguar Land Rover Product Development
 Right Material for the Right Part Identify Cost Effective Routes To Achieving Scalable Solutions For Mass-Market Product - Optimal Multi-Material Combinations Including Aluminium, Magnesium & Composites
Right Material for the Right Part Identify Cost Effective Routes To Achieving Scalable Solutions For Mass-Market Product - Optimal Multi-Material Combinations Including Aluminium, Magnesium & Composites
MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region
 MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region David Willson (david.willson@au.tenovagroup.com) and Jonathan D. A. Clarke (jon.clarke@bigpond.com), Mars Society Australia The centrepiece
MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region David Willson (david.willson@au.tenovagroup.com) and Jonathan D. A. Clarke (jon.clarke@bigpond.com), Mars Society Australia The centrepiece
REDUCING THE OCCURRENCES AND IMPACT OF FREIGHT TRAIN DERAILMENTS
 REDUCING THE OCCURRENCES AND IMPACT OF FREIGHT TRAIN DERAILMENTS D-Rail Final Workshop 12 th November - Stockholm Monitoring and supervision concepts and techniques for derailments investigation Antonella
REDUCING THE OCCURRENCES AND IMPACT OF FREIGHT TRAIN DERAILMENTS D-Rail Final Workshop 12 th November - Stockholm Monitoring and supervision concepts and techniques for derailments investigation Antonella
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE
 INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
SUMMARY OF THE IMPACT ASSESSMENT
 COMMISSION OF THE EUROPEAN COMMUNITIES Brussels, 13.11.2008 SEC(2008) 2861 COMMISSION STAFF WORKING DOCUMT Accompanying document to the Proposal for a DIRECTIVE OF THE EUROPEAN PARLIAMT AND OF THE COUNCIL
COMMISSION OF THE EUROPEAN COMMUNITIES Brussels, 13.11.2008 SEC(2008) 2861 COMMISSION STAFF WORKING DOCUMT Accompanying document to the Proposal for a DIRECTIVE OF THE EUROPEAN PARLIAMT AND OF THE COUNCIL
Results of the Airbus DS led e.deorbit Phase B1 ESA study. Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, October 2017
 Results of the Airbus DS led e.deorbit Phase B1 ESA study Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, 24-26 October 2017 2 e.deorbit Mission Final rendezvous and capture phase Phase B1 Team
Results of the Airbus DS led e.deorbit Phase B1 ESA study Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, 24-26 October 2017 2 e.deorbit Mission Final rendezvous and capture phase Phase B1 Team
UNCLASSIFIED FY 2017 OCO. FY 2017 Base
 Exhibit R-2, RDT&E Budget Item Justification: PB 2017 Air Force Date: February 2016 3600: Research, Development, Test & Evaluation, Air Force / BA 2: Applied Research COST ($ in Millions) Prior Years FY
Exhibit R-2, RDT&E Budget Item Justification: PB 2017 Air Force Date: February 2016 3600: Research, Development, Test & Evaluation, Air Force / BA 2: Applied Research COST ($ in Millions) Prior Years FY
Case Studies on NASA Mars Rover s Mobility System
 Case Studies on NASA Mars Rover s Mobility System Shih-Liang (Sid) Wang 1 Abstract Motion simulation files based on Working Model 2D TM are developed to simulate Mars rover s mobility system. The rover's
Case Studies on NASA Mars Rover s Mobility System Shih-Liang (Sid) Wang 1 Abstract Motion simulation files based on Working Model 2D TM are developed to simulate Mars rover s mobility system. The rover's
ENERGY ANALYSIS OF A POWERTRAIN AND CHASSIS INTEGRATED SIMULATION ON A MILITARY DUTY CYCLE
 U.S. ARMY TANK AUTOMOTIVE RESEARCH, DEVELOPMENT AND ENGINEERING CENTER ENERGY ANALYSIS OF A POWERTRAIN AND CHASSIS INTEGRATED SIMULATION ON A MILITARY DUTY CYCLE GT Suite User s Conference: 9 November
U.S. ARMY TANK AUTOMOTIVE RESEARCH, DEVELOPMENT AND ENGINEERING CENTER ENERGY ANALYSIS OF A POWERTRAIN AND CHASSIS INTEGRATED SIMULATION ON A MILITARY DUTY CYCLE GT Suite User s Conference: 9 November
Potential of Intelligent Transport Systems to reduce greenhouse gas emissions in road freight transport
 Potential of Intelligent Transport Systems to reduce greenhouse gas emissions in road freight transport Andrew Winder Project Manager, Clean Mobility ERTICO, Brussels Contents Background and scope In-vehicle
Potential of Intelligent Transport Systems to reduce greenhouse gas emissions in road freight transport Andrew Winder Project Manager, Clean Mobility ERTICO, Brussels Contents Background and scope In-vehicle
Q&A ON EMISSIONS TESTING
 Q&A ON EMISSIONS TESTING 1. How does ACEA react to the VW situation?... 1 2. How does the current lab test work?... 1 3. Why are there differences between the lab tests and real-world emissions?... 3 4.
Q&A ON EMISSIONS TESTING 1. How does ACEA react to the VW situation?... 1 2. How does the current lab test work?... 1 3. Why are there differences between the lab tests and real-world emissions?... 3 4.
CDF STUDY REPORT. MarsFAST. Assessment of an ESA Fast Mobility Mars Rover
 CDF STUDY REPORT MarsFAST Assessment of an ESA Fast Mobility Mars Rover CDF-148(C)Public page 1 of 224 CDF Study Report MarsFAST Assessment of an ESA Fast Mobility Mars Rover page 2 of 224 This study is
CDF STUDY REPORT MarsFAST Assessment of an ESA Fast Mobility Mars Rover CDF-148(C)Public page 1 of 224 CDF Study Report MarsFAST Assessment of an ESA Fast Mobility Mars Rover page 2 of 224 This study is
Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers
 Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers Instructions You have just been notified that NASA is planning to launch another Mars Rover Mission and you are going to design
Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers Instructions You have just been notified that NASA is planning to launch another Mars Rover Mission and you are going to design
The topic of exhaust emission regulation and reduction is extremely complex. In order to comply with the permissible emission values, increasingly
 READY? We are! 2 By way of numerous patents and INNOVATIONS, we at DEUTZ have played a definitive part in co-determining the development of the modern diesel engine, and as a result have always been a
READY? We are! 2 By way of numerous patents and INNOVATIONS, we at DEUTZ have played a definitive part in co-determining the development of the modern diesel engine, and as a result have always been a
Siemens PLM Software develops advanced testing methodologies to determine force distribution and visualize body deformation during vehicle handling.
 Automotive and transportation Product LMS LMS Engineering helps uncover the complex interaction between body flexibility and vehicle handling performance Business challenges Gain insight into the relationship
Automotive and transportation Product LMS LMS Engineering helps uncover the complex interaction between body flexibility and vehicle handling performance Business challenges Gain insight into the relationship
Balancing operability and fuel efficiency in the truck and bus industry
 Balancing operability and fuel efficiency in the truck and bus industry Realize innovation. Agenda The truck and bus industry is evolving Model-based systems engineering for truck and bus The voice of
Balancing operability and fuel efficiency in the truck and bus industry Realize innovation. Agenda The truck and bus industry is evolving Model-based systems engineering for truck and bus The voice of
Support for the revision of the CO 2 Regulation for light duty vehicles
 Support for the revision of the CO 2 Regulation for light duty vehicles and #3 for - No, Maarten Verbeek, Jordy Spreen ICCT-workshop, Brussels, April 27, 2012 Objectives of projects Assist European Commission
Support for the revision of the CO 2 Regulation for light duty vehicles and #3 for - No, Maarten Verbeek, Jordy Spreen ICCT-workshop, Brussels, April 27, 2012 Objectives of projects Assist European Commission
LUNAR WHEEL TEAM TEAM: ADAM ANDERSON DAN BARRET RICHARD FREDRICKSON KRISTINA LYNN RAMOS ERIC SOLIS. ADVISORS: Dr. COLIN BRITCHER Dr.
 LUNAR WHEEL TEAM TEAM: ADAM ANDERSON DAN BARRET RICHARD FREDRICKSON KRISTINA LYNN RAMOS ERIC SOLIS ADVISORS: Dr. COLIN BRITCHER Dr. SEBASTIAN BAWAB OBJECTIVE design a wheel that would be resistant to the
LUNAR WHEEL TEAM TEAM: ADAM ANDERSON DAN BARRET RICHARD FREDRICKSON KRISTINA LYNN RAMOS ERIC SOLIS ADVISORS: Dr. COLIN BRITCHER Dr. SEBASTIAN BAWAB OBJECTIVE design a wheel that would be resistant to the
# Gun Tube Wear Reduction for 105 mm Artillery
 #10595 - Gun Tube Wear Reduction for 105 mm Artillery May 18 th, 2010 Thomas Boncompain Project engineer 450-581-3080 ext. 8507 PRESENTATION SUMMARY Initial Problem Gun Wear Mechanism Technical Approach
#10595 - Gun Tube Wear Reduction for 105 mm Artillery May 18 th, 2010 Thomas Boncompain Project engineer 450-581-3080 ext. 8507 PRESENTATION SUMMARY Initial Problem Gun Wear Mechanism Technical Approach