Space Robotics Planetary Exploration - a DLR Perspective
|
|
|
- Roberta Summers
- 6 years ago
- Views:
Transcription

 AirTec - SpaceWorld,")
1 Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld, Frankfurt, 5-7 Nov 2013



2 Planetary Exploration Search for traces of past and present life Characterize planetary environment Prepare for human exploration Exploration technologies for Moon, Mars or other celestial bodies in our solar system. DLR Robotics and Mechatronics Center: We are contributing since many years to this ambitious endeavour. Folie 2
3 Major Topics of R&D: (1) Development of mission scenarios for robotic exploration (2) Mobility analyses and realizations for exploration in complex planetary surface topologies (3) Modelling, simulation and optimization of mobile system dynamics behaviour on uneven surfaces (4) Verification and validation of simulated dynamics and performance proving of optimized mobile systems in realistic ground-based testbeds (5) Autonomy increase while using in-house developed localization and navigation methods and algorithms based on visual odometry and others. Folie 3
4 Development and Utilization of Robotics Exploration Technologies with Example on Planetary Wheeled Rovers Folie 4
 Robotics based HRSC planetary processing based on innovative SGM image processing")

5 Localization and Navigation, Autonomy and Perception: DTM / DEM: 3D-Mapping of environment based on stereo cameras, accomodated on rover and on orbiter Visual odometry SGM algorithm (Semi-Global Matching) Robotics based HRSC planetary processing based on innovative SGM image processing Manipulability Positioning and deployment of scientific instruments on planetary surface; Acquisition, transport and handover of soil samples, for processing on rover; Set-up and assembly of modules Build a base station; Inspection Mobility Not only wheels: also legs, legs + wheels, hybrids, ExoMars Rover Folie 5
6 At DLR s RMC Developed Technologies to be Utilized for Exploration Folie 6
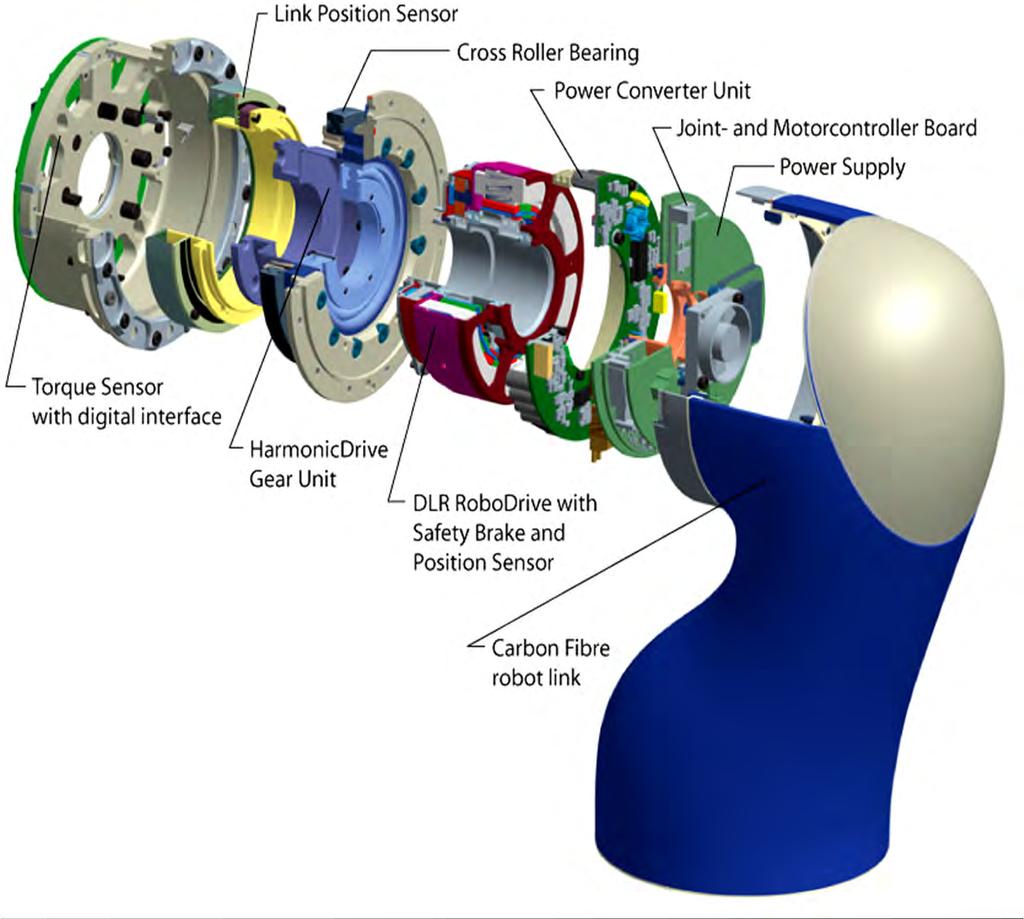
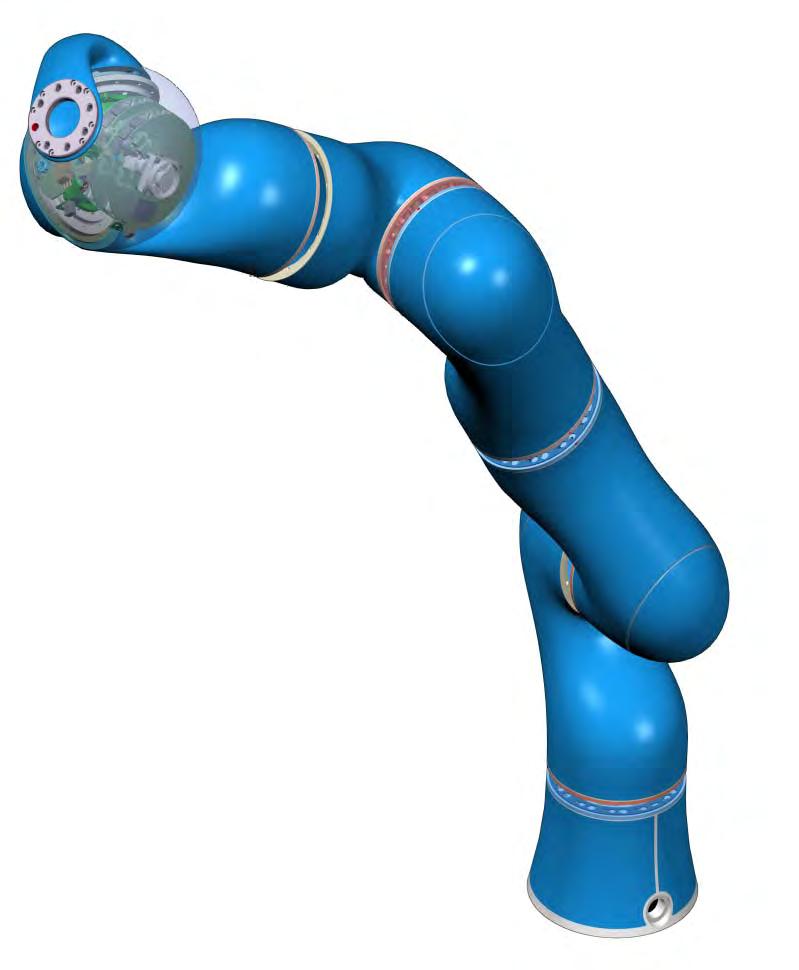
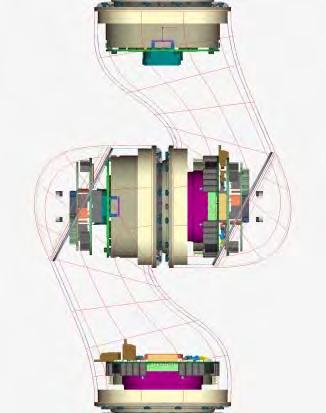
7 Motorization: Actuatorics & Sensorics LBR 3rd Generation Folie 7




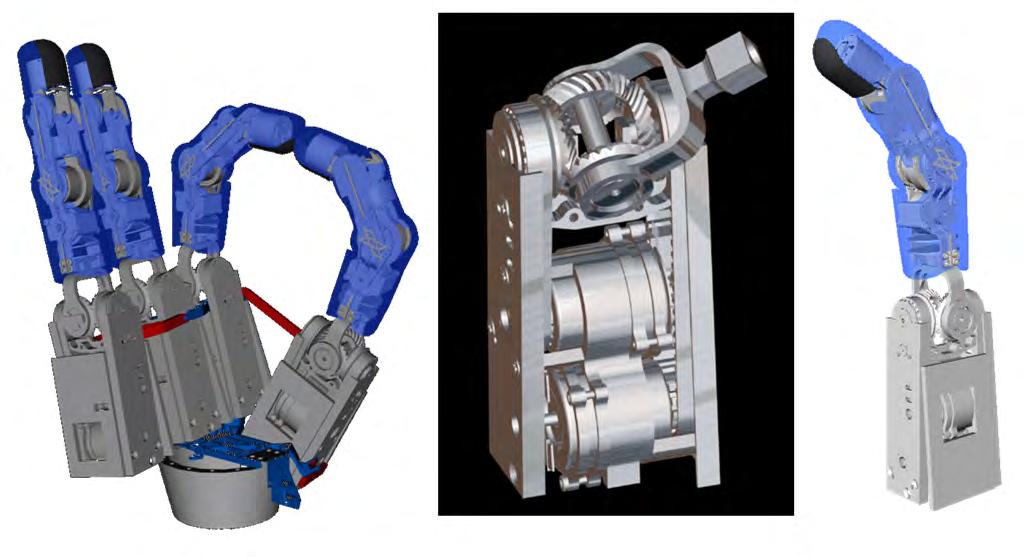
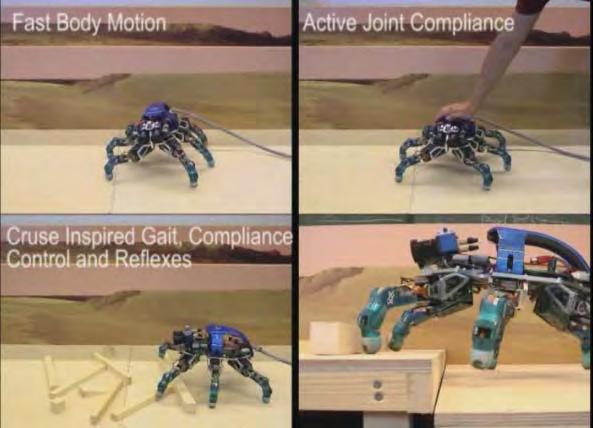
8 Some Selected (Terrestrial) R&D Applications Rovonaut - Simulation DLR 4-Finger Hand Rollin Justin with 51 DOF ExoMars BB1 DLR crawler, 6-legged Folie 8

9 Rollin-Justin Folie 9 Rollin-Justin-KinematicChain-Circle

10 Rovonaut = Rover + Astronaut Folie 10 RoverMitTorso_V3_MPEG4 - Verknüpfung

11 Autonomous Navigation: 3D Mapping and Self-localisation (egomotion) Visual odometry based on stereo camera overlayed with IMU and other sensors Folie 11

12 Folie 12 Vortrag > Autor > Dokumentname > Datum

13 Our Begin Mars Rover ExoMars (ESA 2018) Trafficability: Modelling, Simulation & Verification by Testing Movie: Planetary Exploration Lab - Mars Rover Testbed Folie 13



14 Planetary Exploration Lab PEL at DLR: Verification of Simulations for driveability dynamics etc. by testing in appropriate test facilities with almost realistic Moon and Mars soils, i.e. soil simulants Folie 14

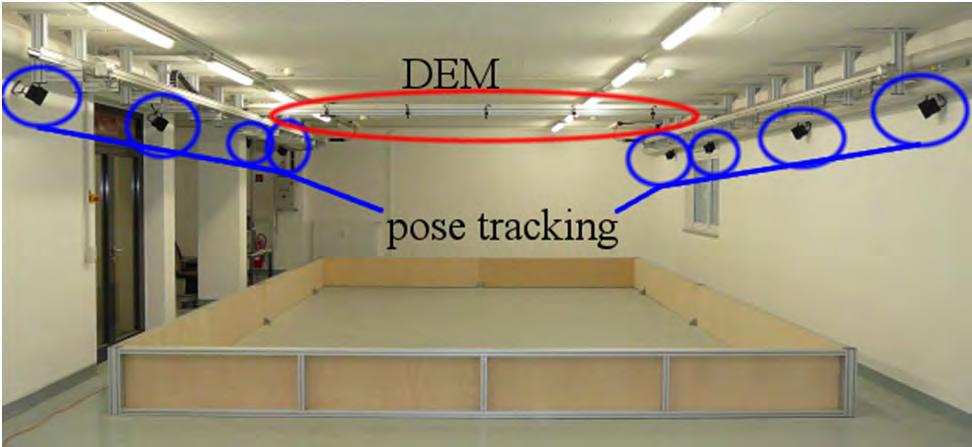
15 marker Folie 15
 integration into")

16 3D mapping (DEM) of testbed surface (SGM) integration into software simulation Folie 16 Bernd Schäfer Berlin 6-7 März 2012






17 Multibody System and Contact Dynamics PCM based on Elastic Foundation Model Multiple contacts MBS Multibody System Wheelsoil slip Deformable wheels Folie 17


18 Simulation of important driveability effects on soft and rigd soils: bulldozing + multipass + more generally compound terrains Folie 18


19 Rover driving over rigid and soft surfaces Folie 19



20 A different modeling approach: Particle based methods, mesh-free DEM Discrete Element Modeling of soft soils interacting with rigid wheels Folie 20
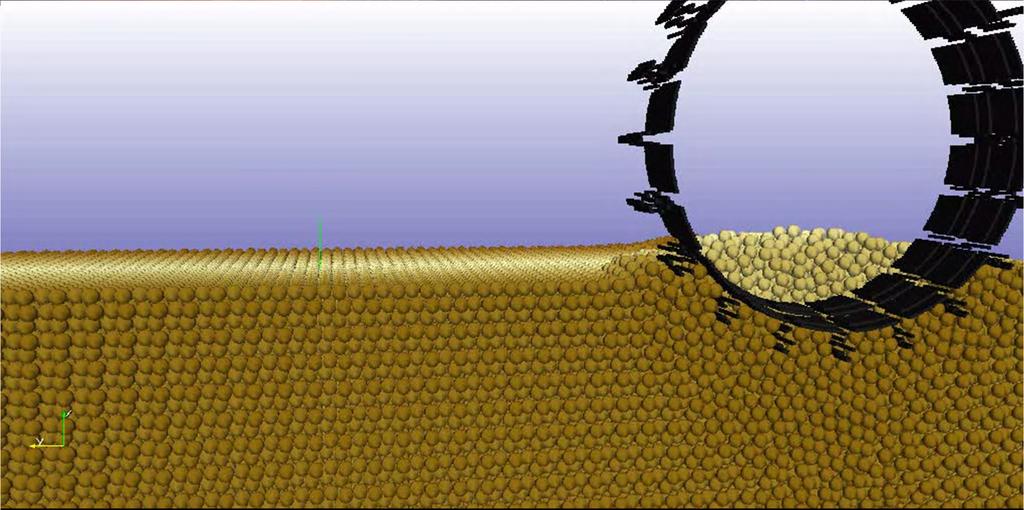
21 Folie 21
22 Basic Technologies Developed at RMC Participation in Planetary Exploration Applications Folie 22



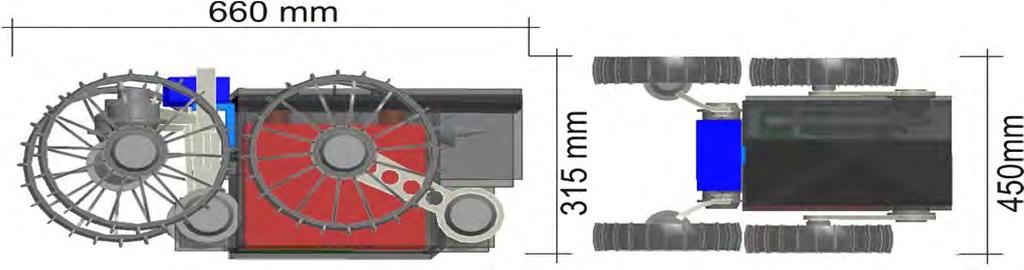
23 (1) Mobile Payload Element MPE Moon Rover ~ 15 kg (lead by KayserThrede) Stowed Configuration Folie 23

24 Movie: MPE Mobile Payload Element for Next Lunar Lander Mission Folie 24

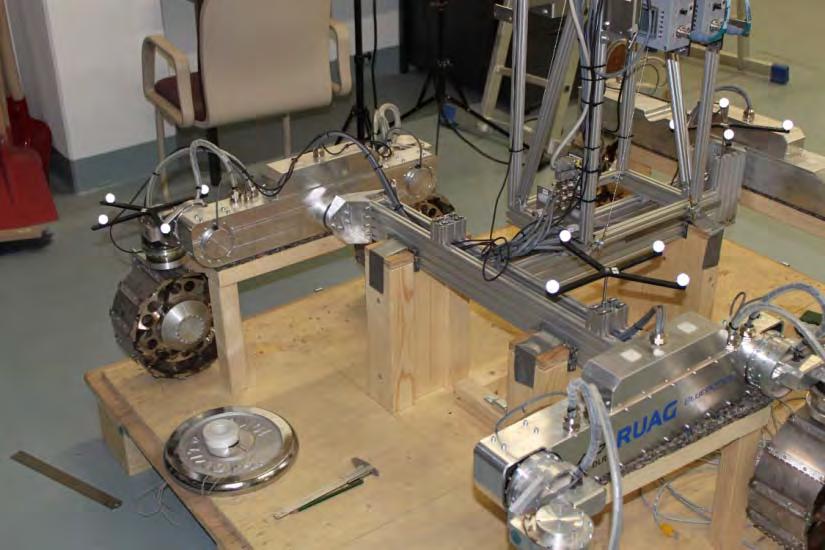
25 (2) Mars: ROV-E EU-Projekt ( years) Challenge: Reduce weight for all subsystems DLR-RMC: - responsible for innovative / optimized locomotion system - modelling, simulation, optimization of driveability performance - development & set-up of innovative actuator concept for wheel driving and steering; - torque and slip control. - breadboarding: single wheel or double wheel testing Folie 25



26 (3) MASCOT - Mobile Asteroid Surface Scout Mission (German payload on 2014/15 Hayabusa-2 Japanese mission) Provide mobility by 1. self-uprighting & 2. hopping over planetary surface Zero-g flight testing in Feb 2012: Parabola flights by NoveSpace Bordeaux Very low gravity: 10-5 g Folie 26




")
27 MASCOT First design approach: 2 excentric massesexzenter + 1 motor, controlled New design: only 1 excentric mass + motor, contr. Conventional concept: two arms (2 paddles) controlled Folie 27


28 (4) (Mars) Interior Exploration using Seismic = Investigations, Geodesy and Heat Transport - Phoenix mission lander - Launch: March 8 - March 27, Landing: September 20, Surface operations: 720 days - End of Mission: September 18, 2018 Goal: understanding the processes that shaped the rocky planets of the inner solar system Folie 28




29 DLR payload contribution (lead by DLR Inst. PF, Berlin): HP 3 Mole - Heat Flow and Physical Properties Package Folie 29



30 (5) ROBEX - visionary long-term cooperative (national) endeavour 5 years: Oct 2012 Sep Space and Deep Sea come together Folie 30


31 Benefit from each other: Autonomy Autonomous localization, mapping & navigation Autonomous vehicles Autonomous manipulation Docking / interfaces Energy supply Communications and more Partners: HG centers: DLR, AWI, Geomar Universities: TUKL, TUD, TUB, TUM, JUB, Marum DFKI ROBEX Pilot Scenario Deep Sea Folie 31



32 ROBEX Making use of capabilities for mobility and manipulability on Moon s surface Folie 32

33 Pilot scenario Moon: ASN Active Seismic Network Deployment Movie: ROBEX - ASN Visualization Folie 33
34 (6) Optimization - 2 well-known examples: ExoMars Rover (ESA) Rocker-Bogie Rover (NASA) ExoMars Rover Rocker-Bogie Rover Folie 34

35 Example of optimization process for rover geometric parameters Terrain scenario: first driving on soft soil and over a rock, then driving on hard soil a step downwards including a rock as obstacle Movie: Optimization of ExoMars rover locomotion subsystem - geometric and kinematic properties using genetic algorithms Folie 35

36 (7) Advanced Kinematics Concepts Legs and Wheels combined a first approach Design features: 6 articulated legs + 6 wheels 3 legs suspended in front and 3 legs in rear, passively central body coupled by differential gear each leg has 3 dof connecting plate for 3 legs attached to central body replaces bogie suspension in ExoMars type rovers Folie 36
")

37 Large ground clearance and high CoM (Center of Mass) Passive suspension on rough terrain with low CoM Folie 37

38 (8) Potential Exploration Scenarios on Moon: working vehicles manipulation skills energy and comms. stations docking and interface elements almost fully autonomous ops. Folie 38


39 ISECG Internat. Space Exploration Coordination Group DLR is partner in ISECG Folie 39 Bernd
RIMRES: A project summary
 RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
Mobile Payload Element (MPE)
") Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
An Overview of CSA s s Space Robotics Activities
 An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
From MARS To MOON. V. Giorgio Director of Italian Programs. Sorrento, October, All rights reserved, 2007, Thales Alenia Space
 From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
The European Lunar Lander Mission
 The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems
 www.dlr.de\rm Chart 1 > ASTRA 2013 - Pan/Tilt-Unit as a Perception Module 16.05.2013 Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems DLR-RMC Robotic and Mechatronic
www.dlr.de\rm Chart 1 > ASTRA 2013 - Pan/Tilt-Unit as a Perception Module 16.05.2013 Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems DLR-RMC Robotic and Mechatronic
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity
 The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
European Lunar Lander: System Engineering Approach
 human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science
 Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES
 FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
Chassis Concepts for the ExoMars Rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics: Results and Roadmaps
 National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, GMT
 Friday, October 30, GMT") Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Human Exploration of the Lunar Surface
 International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
OMOTENASHI. (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor)
") SLS EM-1 secondary payload OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) The smallest moon lander launched by the most powerful rocket in the world * Omotenashi
SLS EM-1 secondary payload OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) The smallest moon lander launched by the most powerful rocket in the world * Omotenashi
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012
 Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing
 Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing Therese Griebel NASA Glenn Research Center 1 Overview Current developments in technology that could meet NASA, DOD and commercial
Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing Therese Griebel NASA Glenn Research Center 1 Overview Current developments in technology that could meet NASA, DOD and commercial
Innovative Mars exploration rover using inflatable or unfolding wheels
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
NEXT Exploration Science and Technology Mission. Relevance for Lunar Exploration
 NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
A New Facility for Lander Touchdown and Rover Mobility Testing at DLR
 A New Facility for Lander Touchdown and Rover Mobility Testing at DLR Lutz Richter, Antje Brucks, Lars Witte DLR Institute of Space Systems, Bremen, Germany New DLR Institute of Space Systems Systems Analysis
A New Facility for Lander Touchdown and Rover Mobility Testing at DLR Lutz Richter, Antje Brucks, Lars Witte DLR Institute of Space Systems, Bremen, Germany New DLR Institute of Space Systems Systems Analysis
SPARTAN. Date: All rights reserved 2011, Thales Alenia Space. Business Unit Space Infrastructures & Transportation
 SPARTAN Date: Business Unit Space Infrastructures & Transportation February the 17 2011 All rights reserved 2011, Thales Alenia Space Project Overview 2 From 3 rd Fp7 Space Call Grant Agreement n. 262837
SPARTAN Date: Business Unit Space Infrastructures & Transportation February the 17 2011 All rights reserved 2011, Thales Alenia Space Project Overview 2 From 3 rd Fp7 Space Call Grant Agreement n. 262837
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return
 Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
Lunar Science and Infrastructure with the Future Lunar Lander
 ICEUM9 Sorrento Lunar Science and Infrastructure with the Future Lunar Lander Session 9: Next steps for Robotic Landers, Rovers and Outposts ICEUM9 Sorrento, Oct. 26, 2007 Hansjürgen Günther 26/10/2007
ICEUM9 Sorrento Lunar Science and Infrastructure with the Future Lunar Lander Session 9: Next steps for Robotic Landers, Rovers and Outposts ICEUM9 Sorrento, Oct. 26, 2007 Hansjürgen Günther 26/10/2007
MASCOT Asteroid Lander with innovative Mobility Mechanism
 www.dlr.de Slide 1 MASCOT Asteroid Lander with innovative Mobility Mechanism Dr. Josef Reill German Aerospace Center - DLR Institute of Robotics and Mechatronics Team-Members: Josef Reill Hans-Jürgen Sedlmayr
www.dlr.de Slide 1 MASCOT Asteroid Lander with innovative Mobility Mechanism Dr. Josef Reill German Aerospace Center - DLR Institute of Robotics and Mechatronics Team-Members: Josef Reill Hans-Jürgen Sedlmayr
Next Steps in Human Exploration: Cislunar Systems and Architectures
 Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Development of the ExoMars Chassis and Locomotion Subsystem
 Development of the ExoMars Chassis and Locomotion Subsystem S. Michaud (1), A. Gibbesch (2), T. Thueer (3), A. Krebs (3), C. Lee (4), B. Despont (1), B. Schäfer (2), R. Slade (5) (1) Oerlikon Space AG
Development of the ExoMars Chassis and Locomotion Subsystem S. Michaud (1), A. Gibbesch (2), T. Thueer (3), A. Krebs (3), C. Lee (4), B. Despont (1), B. Schäfer (2), R. Slade (5) (1) Oerlikon Space AG
Introduction to Robotics
 Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Research Center Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7,
Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Research Center Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7,
Test Facility for Sampler Drills and Distribution Tools
 Aerospace Engineering Department Test Facility for Sampler Drills and Distribution Tools C. Dainese, F. Malnati, A. Ercoli Finzi, G. Sangiovanni The past Small Sample Acquisition and Distribution Tool
Aerospace Engineering Department Test Facility for Sampler Drills and Distribution Tools C. Dainese, F. Malnati, A. Ercoli Finzi, G. Sangiovanni The past Small Sample Acquisition and Distribution Tool
Design of Mobility System for Ground Model of Planetary Exploration Rover
 Technical Paper J. Astron. Space Sci. 29(4), 413-422 (2012) Design of Mobility System for Ground Model of Planetary Exploration Rover Younkyu Kim 1, Wesub Eom 1, Joo-Hee Lee 1, 2, and Eun-Sup Sim 1 1 Aerospace
Technical Paper J. Astron. Space Sci. 29(4), 413-422 (2012) Design of Mobility System for Ground Model of Planetary Exploration Rover Younkyu Kim 1, Wesub Eom 1, Joo-Hee Lee 1, 2, and Eun-Sup Sim 1 1 Aerospace
Case Studies on NASA Mars Rover s Mobility System
 Case Studies on NASA Mars Rover s Mobility System Shih-Liang (Sid) Wang 1 Abstract Motion simulation files based on Working Model 2D TM are developed to simulate Mars rover s mobility system. The rover's
Case Studies on NASA Mars Rover s Mobility System Shih-Liang (Sid) Wang 1 Abstract Motion simulation files based on Working Model 2D TM are developed to simulate Mars rover s mobility system. The rover's
NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration
 National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
Robots to Support a Human Mars Mission
 Robots to Support a Human Mars Mission 1 W. Naumann, P. Hofmann, A. v. Richter Kayser-Threde GmbH Wolfratshauser Str. 48, D-81379 München email: andreas.von.richter@kayser-threde.com 7th Workshop ASTRA
Robots to Support a Human Mars Mission 1 W. Naumann, P. Hofmann, A. v. Richter Kayser-Threde GmbH Wolfratshauser Str. 48, D-81379 München email: andreas.von.richter@kayser-threde.com 7th Workshop ASTRA
Wheeled Robotic Mobility. Dimi Apostolopoulos
 Wheeled Robotic Mobility Dimi Apostolopoulos Significance of Mobility Move Position Transport Employ instruments and tools React to work loads in a controllable fashion ROBOTIC MOBILITY Dimi Apostolopoulos
Wheeled Robotic Mobility Dimi Apostolopoulos Significance of Mobility Move Position Transport Employ instruments and tools React to work loads in a controllable fashion ROBOTIC MOBILITY Dimi Apostolopoulos
Lunar Robotics. Dr. Rob Ambrose, NASA JSC December Dr. Robert O. Ambrose
 Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
EUROBOT EVA-assistant robot for ISS
 In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 EUROBOT EVA-assistant robot for
In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 EUROBOT EVA-assistant robot for
Lunar Architecture and LRO
 Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
John Klaus Robert Cooper Thilina Fernando Zoe Morozko
 Faculty Advisors: Dr. Dan Kirk Greg Peebles Justin Treptow Alex Morrese Alexis Mendez Casselle Russell John Klaus Robert Cooper Thilina Fernando Zoe Morozko Paul Martin Ben Burnett Damian Harasiuk 1 Launch
Faculty Advisors: Dr. Dan Kirk Greg Peebles Justin Treptow Alex Morrese Alexis Mendez Casselle Russell John Klaus Robert Cooper Thilina Fernando Zoe Morozko Paul Martin Ben Burnett Damian Harasiuk 1 Launch
Green Mobility Technology Roadmap
 Green Mobility Technology Roadmap Prof. Dr.-Ing. Horst E. Friedrich Institute of Vehicle Concepts German Aerospace Center (DLR) SCCER-Mobility 1st Annual Conference at ETH Zürich 11 th September 2014 www.dlr.de
Green Mobility Technology Roadmap Prof. Dr.-Ing. Horst E. Friedrich Institute of Vehicle Concepts German Aerospace Center (DLR) SCCER-Mobility 1st Annual Conference at ETH Zürich 11 th September 2014 www.dlr.de
Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints
 Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints Lan Yue Ji, Sebatian Bartsch, Frank Kirchner DFKI Bremen & Universität Bremen Robotics Innovations Center Director:
Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints Lan Yue Ji, Sebatian Bartsch, Frank Kirchner DFKI Bremen & Universität Bremen Robotics Innovations Center Director:
Autonomous Sample Acquisition for the ExoMars Rover
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Autonomous Sample Acquisition for
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Autonomous Sample Acquisition for
Long-Range Rovers for Mars Exploration and Sample Return
 2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
Canadian Lunar & Planetary Rover. Development
 Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
 Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
DLR s Free Piston Linear Generator FPLG Development of an Innovative Linear Power Unit
 DLR s Free Piston Linear Generator FPLG of an Innovative Linear Power Unit Florian Kock September 8, 2015 www.dlr.de Slide 1 > Kock > FKLG > 2015-09-08 FPLG Project Overview A Decade of Linear Power 2002
DLR s Free Piston Linear Generator FPLG of an Innovative Linear Power Unit Florian Kock September 8, 2015 www.dlr.de Slide 1 > Kock > FKLG > 2015-09-08 FPLG Project Overview A Decade of Linear Power 2002
Abstract #1756. English. French. Author(s) and Co Author(s) ispace & Team Hakuto s 2017 Lunar Mission
 and Co Author(s) ispace & Team Hakuto s 2017 Lunar Mission") 4/25/2017 CIM TPMS Abstract #1756 English ispace & Team Hakuto s 2017 Lunar Mission This presentation will introduce ispace, a lunar exploration company headquartered in Tokyo, Japan, and Team Hakuto,
4/25/2017 CIM TPMS Abstract #1756 English ispace & Team Hakuto s 2017 Lunar Mission This presentation will introduce ispace, a lunar exploration company headquartered in Tokyo, Japan, and Team Hakuto,
Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil
 Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil By Brian Edwards, Vehicle Dynamics Group, Pratt and Miller Engineering, USA 22 Engineering Reality Magazine Multibody Dynamics
Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil By Brian Edwards, Vehicle Dynamics Group, Pratt and Miller Engineering, USA 22 Engineering Reality Magazine Multibody Dynamics
On the feasibility of a fast track return to Mars
 On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
Name: Space Exploration PBL
 Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Landing Targets and Technical Subjects for SELENE-2
 Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
RESULTS of ESA/ESTEC and VNII Transmash & RCL joint ACTIVITIES AIMED at PLANETARY ROVERS DEVELOPMENT
 In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 RESULTS of and VNII Transmash &
In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 RESULTS of and VNII Transmash &
Japanese Rover Test-bed for Lunar Exploration
 Japanese Rover Test-bed for Lunar Exploration Takashi Kubota*, Yasuharu Kunii**, Yoji Kuroda***, Masatsygu Otsuki* *ISAS/JAXA, 3-1-1, Yoshinodai, Sagamihara 229-8510, JAPAN **Chuo University, 1-13-27,
Japanese Rover Test-bed for Lunar Exploration Takashi Kubota*, Yasuharu Kunii**, Yoji Kuroda***, Masatsygu Otsuki* *ISAS/JAXA, 3-1-1, Yoshinodai, Sagamihara 229-8510, JAPAN **Chuo University, 1-13-27,
System Testing by Flight Operators the Rosetta Experience
 European Space Operations Center System Testing by Flight Operators the Rosetta Experience E. Montagnon, P. Ferri, L. O Rourke, A. Accomazzo, I. Tanco, J. Morales, M. Sweeney Spaceops 2004, Montréal, Canada,
European Space Operations Center System Testing by Flight Operators the Rosetta Experience E. Montagnon, P. Ferri, L. O Rourke, A. Accomazzo, I. Tanco, J. Morales, M. Sweeney Spaceops 2004, Montréal, Canada,
Aditya.V Mechatronics, MGIT
 Unmanned Terrain with Rocker Bogie Suspension Aditya.V Mechatronics, MGIT Abstract: A rover is a vehicle for driving over rough terrain, especially one driven by remote control over extraterrestrial terrain.
Unmanned Terrain with Rocker Bogie Suspension Aditya.V Mechatronics, MGIT Abstract: A rover is a vehicle for driving over rough terrain, especially one driven by remote control over extraterrestrial terrain.
Traction Performance of Wheel and Track for Soft-Soil Traversal
 ICRA 10 Planetary Rovers Workshop May 3rd, 2010 Traction Performance of Wheel and Track for Soft-Soil Traversal Kazuya Yoshida, Keiji Nagatani, Junya Yusa Tohoku University, Japan Traction Performance
ICRA 10 Planetary Rovers Workshop May 3rd, 2010 Traction Performance of Wheel and Track for Soft-Soil Traversal Kazuya Yoshida, Keiji Nagatani, Junya Yusa Tohoku University, Japan Traction Performance
Experimental Validation of Stable Obstacle Climbing with a Four-Wheel Mobile Robot OpenWHEEL
 al Validation of Stable Obstacle with a Four-Wheel Mobile Robot OpenWHEEL i3r Jean-Christophe.Fauroux@ifma.fr Belhassen-Chedli.Bouzgarrou@ifma.fr Frederic.Chapelle@ifma.fr Clermont-Ferrand, France LaMI
al Validation of Stable Obstacle with a Four-Wheel Mobile Robot OpenWHEEL i3r Jean-Christophe.Fauroux@ifma.fr Belhassen-Chedli.Bouzgarrou@ifma.fr Frederic.Chapelle@ifma.fr Clermont-Ferrand, France LaMI
Control of Mobile Robots
 Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Lunar Missions by Year - All Countries. Mission count dropped as we transitioned from politically driven missions to science driven missions
 n Lunar Missions by Year - All Countries Key: All Mission Attempts Mission Successes Mission count dropped as we transitioned from politically driven missions to science driven missions Capability Driven
n Lunar Missions by Year - All Countries Key: All Mission Attempts Mission Successes Mission count dropped as we transitioned from politically driven missions to science driven missions Capability Driven
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE
 INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
Analysis of Power Storage Media for the Exploration of the Moon
 Analysis of Power Storage Media for the Exploration of the Moon Michael Loweth, Rachel Buckle ICEUM 9 22-26 th October 2007 ABSL Space Products 2005 2007 Servicing USA and the ROW UNITED KINGDOM Culham
Analysis of Power Storage Media for the Exploration of the Moon Michael Loweth, Rachel Buckle ICEUM 9 22-26 th October 2007 ABSL Space Products 2005 2007 Servicing USA and the ROW UNITED KINGDOM Culham
Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon
 , Germany Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori
, Germany Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori
Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection
 Journal of Asian Electric Vehicles, Volume 7, Number 2, December 2009 Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection Koiro
Journal of Asian Electric Vehicles, Volume 7, Number 2, December 2009 Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection Koiro
Philae : A made to measure battery. Richard Hague ESTEC AIM Workshop 22/23 Feb 2016
 Philae : A made to measure battery Richard Hague ESTEC AIM Workshop 22/23 Feb 2016 Agenda 1 SAFT s Space Heritage 2 Philae 3 ExoMars Rover AIM 2 presnetation 1 SAFT S SPACE HERITAGE 3 Space Satellites
Philae : A made to measure battery Richard Hague ESTEC AIM Workshop 22/23 Feb 2016 Agenda 1 SAFT s Space Heritage 2 Philae 3 ExoMars Rover AIM 2 presnetation 1 SAFT S SPACE HERITAGE 3 Space Satellites
MASCOT Marco Polo Surface Scout. Progress Report on Lander Package Study for Marco Polo
 MASCOT Marco Polo Surface Scout Progress Report on Lander Package Study for Marco Polo Lutz Richter 1, Lars Witte 1, Tra-Mi Ho 1, Stephan Ulamec 2, Jean-Pierre Bibring 3 1 DLR Bremen, 2 DLR Cologne, 3
MASCOT Marco Polo Surface Scout Progress Report on Lander Package Study for Marco Polo Lutz Richter 1, Lars Witte 1, Tra-Mi Ho 1, Stephan Ulamec 2, Jean-Pierre Bibring 3 1 DLR Bremen, 2 DLR Cologne, 3
Mars Surface Mobility Proposal
 Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
Rover development status
 EXOMARS PROJECT 2018 Mission Rover development status ASTRA Workshop 15-17 May 2013 P. Baglioni & the EXM Rover Team Progress on the 2018 Mission Following EXM Program approvals from the Council and IPC
EXOMARS PROJECT 2018 Mission Rover development status ASTRA Workshop 15-17 May 2013 P. Baglioni & the EXM Rover Team Progress on the 2018 Mission Following EXM Program approvals from the Council and IPC
Microbots for Large-Scale Planetary Surface and Subsurface Exploration
 Microbots for Large-Scale Planetary Surface and Subsurface Exploration Steven Dubowsky, Principal Investigator Karl Iagnemma, Co-Investigator Field and Space Robotics Laboratory Massachusetts Institute
Microbots for Large-Scale Planetary Surface and Subsurface Exploration Steven Dubowsky, Principal Investigator Karl Iagnemma, Co-Investigator Field and Space Robotics Laboratory Massachusetts Institute
Performance Evaluation of Wheeled Rover by Analysis and Test
 Performance Evaluation of Wheeled Rover by Analysis and Test Gaurav Sharma, Srividhya G., Shamrao, K. Balaji, G. Nagesh, C.D. Sridhara Abstract Rovers provide a mobile platform for exploring planetary
Performance Evaluation of Wheeled Rover by Analysis and Test Gaurav Sharma, Srividhya G., Shamrao, K. Balaji, G. Nagesh, C.D. Sridhara Abstract Rovers provide a mobile platform for exploring planetary
Aerial robots that interact with the environment
 Aerial robots that interact with the environment Guillermo Heredia*, Aníbal Ollero * Professor at University of Seville, Spain Robotics, Vision and Control group (GRVC) guiller@us.es Robotics, Vision and
Aerial robots that interact with the environment Guillermo Heredia*, Aníbal Ollero * Professor at University of Seville, Spain Robotics, Vision and Control group (GRVC) guiller@us.es Robotics, Vision and
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
VISION-BASED NAVIGATION TECHNIQUES IN PLANETARY ROVERS
 REPORT 15.12.2010 VISION-BASED NAVIGATION TECHNIQUES IN PLANETARY ROVERS Hans Baumgartner 6153583 CONTENTS ABBREVIATIONS... 3 1. INTRODUCTION... 4 2. PLANETARY ROVERS... 5 2.1 History... 5 2.2 Sensors
REPORT 15.12.2010 VISION-BASED NAVIGATION TECHNIQUES IN PLANETARY ROVERS Hans Baumgartner 6153583 CONTENTS ABBREVIATIONS... 3 1. INTRODUCTION... 4 2. PLANETARY ROVERS... 5 2.1 History... 5 2.2 Sensors
Pantheon Mission Profiles
 Pantheon Mission Profiles BACKGROUND Pantheon is the largest planet in the KRML Cluster. It has an atmosphere that can support human and plant life. Pantheon has drinkable water, but it currently lacks
Pantheon Mission Profiles BACKGROUND Pantheon is the largest planet in the KRML Cluster. It has an atmosphere that can support human and plant life. Pantheon has drinkable water, but it currently lacks
Last week we saw. Today: The Role of Locomotion : Robotics systems and science Lecture 4: Locomotion
 6.141: Robotics systems and science Lecture 4: Locomotion Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2009 Last week we saw Bang-bang control Open loop control Closed loop control: P, I, D Motors
6.141: Robotics systems and science Lecture 4: Locomotion Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2009 Last week we saw Bang-bang control Open loop control Closed loop control: P, I, D Motors
Results of the Airbus DS led e.deorbit Phase B1 ESA study. Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, October 2017
 Results of the Airbus DS led e.deorbit Phase B1 ESA study Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, 24-26 October 2017 2 e.deorbit Mission Final rendezvous and capture phase Phase B1 Team
Results of the Airbus DS led e.deorbit Phase B1 ESA study Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, 24-26 October 2017 2 e.deorbit Mission Final rendezvous and capture phase Phase B1 Team
Mars 2018 Mission Status and Sample Acquisition Issues
 Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE
 WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE Ilkka Leppänen, Sami Salmi and Aarne Halme Automation Technology Laboratory Helsinki University of Technology PL 3000, 02015 HUT, Finland E-mail
WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE Ilkka Leppänen, Sami Salmi and Aarne Halme Automation Technology Laboratory Helsinki University of Technology PL 3000, 02015 HUT, Finland E-mail
CONCEPT STUDY FOR THE FASTER MICRO SCOUT ROVER
 CONCEPT STUDY FOR THE FASTER MICRO SCOUT ROVER Roland U. Sonsalla, Martin Fritsche, Thomas Voegele, and Frank Kirchner DFKI Robotics Innovation Center, 28359 Bremen, Germany ABSTRACT In contrast to the
CONCEPT STUDY FOR THE FASTER MICRO SCOUT ROVER Roland U. Sonsalla, Martin Fritsche, Thomas Voegele, and Frank Kirchner DFKI Robotics Innovation Center, 28359 Bremen, Germany ABSTRACT In contrast to the
Light-Lift Rocket II
 Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Adrestia. A mission for humanity, designed in Delft. Challenge the future
 Adrestia A mission for humanity, designed in Delft 1 Adrestia Vision Statement: To inspire humanity by taking the next step towards setting a footprint on Mars Mission Statement Our goal is to design an
Adrestia A mission for humanity, designed in Delft 1 Adrestia Vision Statement: To inspire humanity by taking the next step towards setting a footprint on Mars Mission Statement Our goal is to design an
Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability
 Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability 2007 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar
Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability 2007 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar
Wheeled Mobile Robots
 Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
RB-Mel-03. SCITOS G5 Mobile Platform Complete Package
 RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
Experimental Verification of Low Emission Combustor Technology at DLR
 www.dlr.de Chart 1 > FORUM-AE Non-CO2 mitigation technology Workshop> Hassa > 2.7.2014 Experimental Verification of Low Emission Combustor Technology at DLR Christoph Hassa Institute of Propulsion Technology
www.dlr.de Chart 1 > FORUM-AE Non-CO2 mitigation technology Workshop> Hassa > 2.7.2014 Experimental Verification of Low Emission Combustor Technology at DLR Christoph Hassa Institute of Propulsion Technology
Challenges of Designing the MarsNEXT Network
 Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various
 25 6 18 In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various applications such as buildings maintenance, security and
25 6 18 In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various applications such as buildings maintenance, security and
Low Power Mobility System for Micro Planetary Rover Micro5
 i-sairas 99, ESTEC, Noordwijk, The Netherlands, June 1-3 1999 Low Power Mobility System for Micro Planetary Rover Micro5 Yoji KURODA*, Koji KONDO*, Kazuaki NAKAMURA*, Yasuharu KUNII**, and Takashi KUBOTA***
i-sairas 99, ESTEC, Noordwijk, The Netherlands, June 1-3 1999 Low Power Mobility System for Micro Planetary Rover Micro5 Yoji KURODA*, Koji KONDO*, Kazuaki NAKAMURA*, Yasuharu KUNII**, and Takashi KUBOTA***
Suitability of reusability for a Lunar re-supply system
 www.dlr.de Chart 1 Suitability of reusability for a Lunar re-supply system Etienne Dumont Space Launcher Systems Analysis (SART) Institut of Space Systems, Bremen, Germany Etienne.dumont@dlr.de IAC 2016
www.dlr.de Chart 1 Suitability of reusability for a Lunar re-supply system Etienne Dumont Space Launcher Systems Analysis (SART) Institut of Space Systems, Bremen, Germany Etienne.dumont@dlr.de IAC 2016
Formation Flying Experiments on the Orion-Emerald Mission. Introduction
 Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Development and Testing of the Mars Rover Mobility Platform for Educational and Research Purposes
 Development and Testing of the Mars Rover Mobility Platform for Educational and Research Purposes Luiz Filipe Barbosa 1, Jevgenijs Trunins 2, Yahya H Zweiri 3, Malcolm Claus 4, Niklaus Kamm 5 1, 2, 3 School
Development and Testing of the Mars Rover Mobility Platform for Educational and Research Purposes Luiz Filipe Barbosa 1, Jevgenijs Trunins 2, Yahya H Zweiri 3, Malcolm Claus 4, Niklaus Kamm 5 1, 2, 3 School
THE HISTORY OF MARS EXPLORATION
 THE HISTORY OF MARS EXPLORATION Philippe Masson 1st Mars Express Science Conference (ESTEC, February 21-25, 2005) Mars Observers: The European Pioneers Nicolaus Copernicus: described the motion of the
THE HISTORY OF MARS EXPLORATION Philippe Masson 1st Mars Express Science Conference (ESTEC, February 21-25, 2005) Mars Observers: The European Pioneers Nicolaus Copernicus: described the motion of the
Unmanned autonomous vehicles in air land and sea
 based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
ASTRIUM. Lunar Lander Concept for LIFE. Hansjürgen Günther TOB 11. Bremen, 23/
 Lunar Lander Concept for LIFE Hansjürgen Günther TOB 11 Bremen, 23/24.11.2006 This document is the property of EADS SPACE. It shall not be communicated to third parties without prior written agreement.its
Lunar Lander Concept for LIFE Hansjürgen Günther TOB 11 Bremen, 23/24.11.2006 This document is the property of EADS SPACE. It shall not be communicated to third parties without prior written agreement.its
Bild : Bernhard Mühr German Aerospace Center Flight Operations
 German Aerospace Center Flight Operations Bild : Bernhard Mühr www.wolkenatlas.de Introduction DLR is Germany s aerospace research center and space agency with about 4700 employees in 31 research institutes
German Aerospace Center Flight Operations Bild : Bernhard Mühr www.wolkenatlas.de Introduction DLR is Germany s aerospace research center and space agency with about 4700 employees in 31 research institutes
Europa Lander. Mission Concept Update 3/29/2017
 Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
Improved Traversal for Planetary Rovers through Forward Acquisition of Terrain Trafficability
 Improved Traversal for Planetary Rovers through Forward Acquisition of Terrain Trafficability Planetary Rovers Workshop, ICRA 2013 Yashodhan Nevatia Space Applications Services May, 9th 2013 Co-authors
Improved Traversal for Planetary Rovers through Forward Acquisition of Terrain Trafficability Planetary Rovers Workshop, ICRA 2013 Yashodhan Nevatia Space Applications Services May, 9th 2013 Co-authors
Presse-Information. The mycopter project points the way towards Personal Aerial Vehicles
 The mycopter project points the way towards Personal Aerial Vehicles Road congestion is a fact of everyday life for many people. A possible solution for the future is expanding personal transport to include
The mycopter project points the way towards Personal Aerial Vehicles Road congestion is a fact of everyday life for many people. A possible solution for the future is expanding personal transport to include
THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS. Nagin Cox
 THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS Nagin Cox Jet Propulsion Laboratory National Air & Space Administration/California Institute of Technology Email: nagin@jpl.nasa.gov Abstract: Since
THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS Nagin Cox Jet Propulsion Laboratory National Air & Space Administration/California Institute of Technology Email: nagin@jpl.nasa.gov Abstract: Since
Study on a Suspension of a Planetary Exploration Rover to Improve Driving Performance During Overcoming Obstacles
 Technical Paper J. Astron. Space Sci. 29(4), 381-387 (2012) http://dx.doi.org/10.5140/jass.2012.29.4.381 Study on a Suspension of a Planetary Exploration Rover to Improve Driving Performance During Overcoming
Technical Paper J. Astron. Space Sci. 29(4), 381-387 (2012) http://dx.doi.org/10.5140/jass.2012.29.4.381 Study on a Suspension of a Planetary Exploration Rover to Improve Driving Performance During Overcoming
Lunette: A Global Network of Small Lunar Landers
 Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Massachusetts Space Grant Consortium
 Massachusetts Space Grant Consortium Distinguished Lecturer Series NASA Administrator Dr. Michael Griffin NASA s Exploration Architecture March 8, 2006 Why We Explore Human curiosity Stimulates our imagination
Massachusetts Space Grant Consortium Distinguished Lecturer Series NASA Administrator Dr. Michael Griffin NASA s Exploration Architecture March 8, 2006 Why We Explore Human curiosity Stimulates our imagination