A New Facility for Lander Touchdown and Rover Mobility Testing at DLR
|
|
|
- Valerie Moore
- 6 years ago
- Views:
Transcription

1 A New Facility for Lander Touchdown and Rover Mobility Testing at DLR Lutz Richter, Antje Brucks, Lars Witte DLR Institute of Space Systems, Bremen, Germany
 Small satellite bus Advanced launcher upper stage")
 Surface mobility (lateral & vertical)")
2 New DLR Institute of Space Systems Systems Analysis (Concurrent Engineering Facility) Small satellite bus Advanced launcher upper stage R & D in precision attitude control Exploration technologies Landing systems (with local industry) Surface mobility (lateral & vertical) Mission studies
 Lunar Orbiter view of later A12 landing site (courtesy:")
3 Landing systems at DLR: timely activity to support future lunar landers (and possibly ExoMars) Lunar Orbiter view of later A12 landing site (courtesy: Astrium-ST)



4 Landing systems lunar soft landers Surveyor III, visited by Apollo 12 Downslope landing leg
 Impact attenuation & dynamics Challenging (and poorly known)")
5 Landing systems lunar soft landers Issues: Propulsion GNC (N.B.: vision systems affected by dust in final phase) Impact attenuation & dynamics Challenging (and poorly known) terrains for some missions (courtesy: Astrium-ST)
")

6 Landing systems Mars soft landers Phoenix (EDL: May 24, 2008) Implementations: Viking Lander Mars Polar Lander / Phoenix Mars Sample Return


7 Landing systems ESA Rosetta lander Philae Rapid dissipation of impact energy critical (low g environment)
8 Motivation for a new test facility at DLR Seize the opportunity of new DLR infrastructure build-up: approval of planetary landing and mobility test facility ( LAMA, Landing & Mobility Test Facility) High speed soil deformation as in landing impacts not amenable to faithful numerical simulation LAMA objectives: Realistically simulate touchdown dynamics and tip-over stability of lander spacecraft in presence of terrain slopes and lateral velocity component Realistically study mobility of rovers at their operational weight while moving on soils Feature configurable realistic terrain: granular material + rock coverage -> Requires offloading device to adapt weight of test object during dynamics phase to lunar/planetary one under study
9 LAMA side view y x z cardanic joint force torque sensor force torque sensor (tilteable) test surface 2-axis inclinometer and yaw angle sensor IMU industrial robot with translation system translation axis
10 Salient features (1) Industrial robot system moving alongside and above soil bin to provide real-time controlled offloading force to test object during dynamical phase (from contact onwards) Test objects need not be scaled but may (and should be) full mass and full size: afford realistic simulations of dynamics -> landing impact & rover mobility Allowable upper limit of test object mass ~500 kg (add: specification/requirements from quant. requirements doc ; results of deceleration computations)
11 Salient features (2) Provide lander impact conditions (+z along g vector): 0.1 m/s < v x < 1.0 m/s (TBC) 0.1 m/s < v y < 1.0 m/s (TBC) 0.5 m/s < v z < 2.0 m/s (TBC) During contact phase: Provide test object commandeable weight reduction Weight reduction force to follow test object motion Predicted durations of dynamical phase: 20 ms < T < 2000 ms Predicted movement of test object CoM during dynamical phase: 10 mm < s < 2000 mm
12 Salient features (3) Intended mass, weight, speed and soil properties are simultaneously met in a given test* Concepts with passive weight offloading considered for LAMA but discarded: passive offloading schemes with countermasses or buoyancy systems (balloons) introducing additional inertia -> may be counteracted by active elements, however leading to active system themselves Passive Russian weight reductor from Lunokhod era *effects of reduced g on soil properties: studied separately experimentally & numerically
13 LAMA geometry in ZARM high bay (December 07 late 09) (dimensions in m) (dimensions in cm)
 Mars: Gusev Crater ( Spirit, McMurdo")
14 Terrain simulation Moon: Descartes (Apollo 16) Mars: Gusev Crater ( Spirit, McMurdo pan)


15 Terrain simulation Relevant experience available at DLR from rover work physical planetary soil simulants (grain size distribution, bulk density) Only feasible in horizontal testbeds as in LAMA DLR single wheel testbed Previous rover testbed at DLR

16 LAMA build-up & initial usage schedule
17 Summary LAMA: unique facility Hereby extending invitation to users: Development tests on lander impact dynamics (for upcoming lunar landers: NEXT, SELENE-II, Chang e-2, Chandrayaan-2, ) Rover mobility tests Planning campaign supporting ExoMars rover Breadboard tests in 2008 Currently preparing for NEXT-related lander development tests
18 Backup material

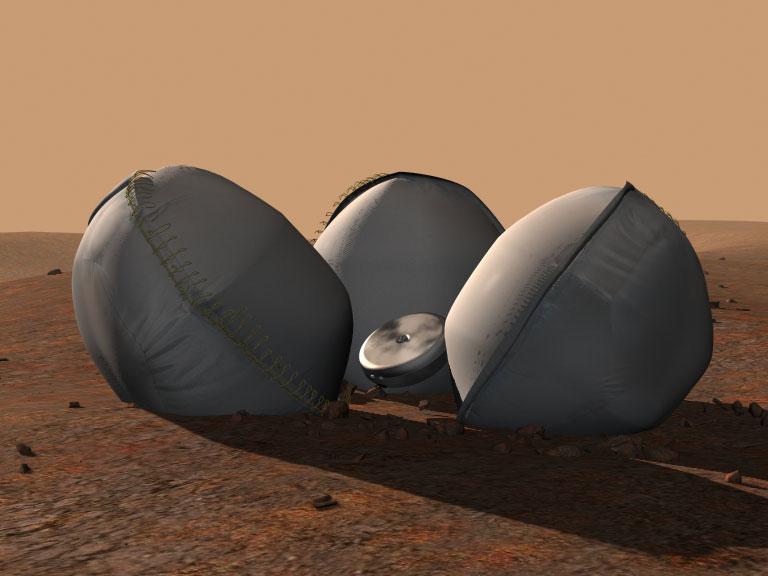
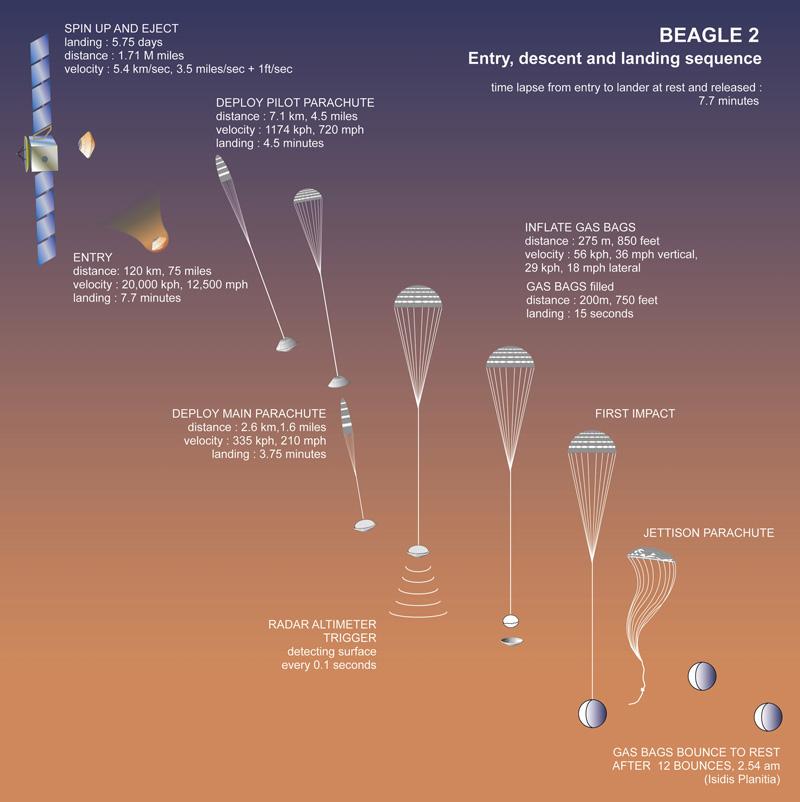
19 Airbag landers: Beagle 2

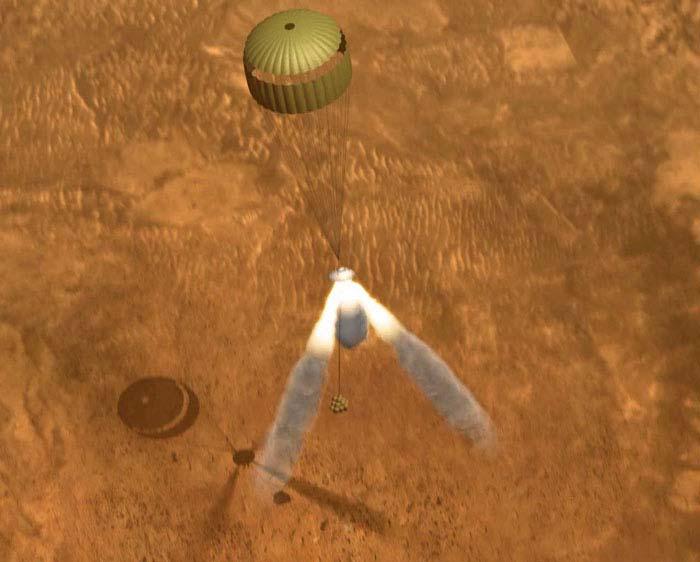


20 Airbag landers: MPF & MER

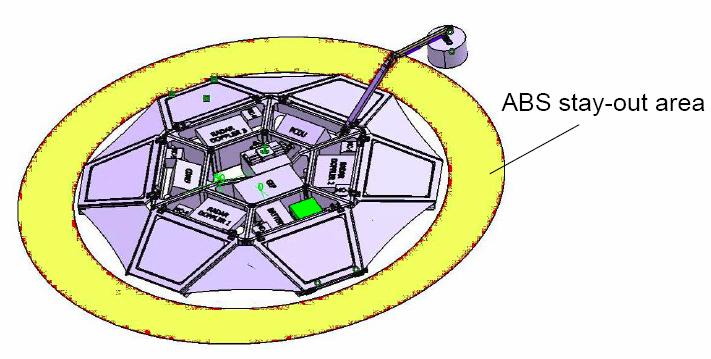
21 Airbag landers: ExoMars
 Flexibles Metallrad; aufbauend auf Vorarbeiten bei DLR-RS Demonstrator")
22 Ausgewählte Projekte: Radentwicklung Rover ESA- Mission ExoMars (Drittmittelprojekt: ESA-Auftrag) Flexibles Metallrad; aufbauend auf Vorarbeiten bei DLR-RS Demonstrator Bridget

23 Influence of rover weight on drawbar pull
![Test soil properties 22mm 30mm R^2 0.9996 0.9989 n [-] 0.854 0.](/docs-images/74/70396067/images/24-2.jpg "849 Vertical loading parameters k* [Nm -(n+2) ] 410865.807 379664.")
![508 = > k c [Nm -(n+1) ] k φ [Nm -(n+2) ] 1287.05 293861 Shear strength parameters c=40 Pa φ=25.](/docs-images/74/70396067/images/24-3.jpg "6 Shear Stress Tau [N/m^2] 450 400 350 300 250 200 150 100 50 0 Sigma vs.")
24 Test soil properties 22mm 30mm R^ n [-] Vertical loading parameters k* [Nm -(n+2) ] = > k c [Nm -(n+1) ] k φ [Nm -(n+2) ] Shear strength parameters c=40 Pa φ=25.6 Shear Stress Tau [N/m^2] Sigma vs. Tau Pressure Sigma [N/m^2] y = 0,4791x + 40,71 R 2 = 0,9349 Reihe1 Linear (Reihe1)
25 Predicted lander deceleration paths Assumption: level ground (worst case) E=R*s (R assumed to be constant along set s due to shallow penetration in most cases) Bernstein model for flat plate footprint radius [m]: 0.1 number of (equal) footprints [-]: 4 footprint area [m^2]: mass [kg]: 200 vertical impact speed [m/s]: 2 p = k * z n * k k = c + b k φ soil z [m] deceleration duration [s] mean force from soil per footing [N] DLR MSS-A DLR MSS-C DLR MSS-D MER 'loose' MER 'dense' Dry sand Sandy loam Clayey soil Deceleration distance to be = indentation depth from Bernstein model


 and loose")
26 Effect of g-level on soil strength e.g., Nakashima et al.: angle of repose of dense (left) and loose sand at 1/6 g
27 LAMA in context with proximity simulators Lander- Anflugphase Lander- Aufprallphase Satelliten AOCS? RDV & Docking EPOS+ LAMA angewiesen auf realistische Oberflächensimulation Rovertraktion, Fahrdynamik
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity
 The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
From MARS To MOON. V. Giorgio Director of Italian Programs. Sorrento, October, All rights reserved, 2007, Thales Alenia Space
 From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES
 FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
Analysis of Power Storage Media for the Exploration of the Moon
 Analysis of Power Storage Media for the Exploration of the Moon Michael Loweth, Rachel Buckle ICEUM 9 22-26 th October 2007 ABSL Space Products 2005 2007 Servicing USA and the ROW UNITED KINGDOM Culham
Analysis of Power Storage Media for the Exploration of the Moon Michael Loweth, Rachel Buckle ICEUM 9 22-26 th October 2007 ABSL Space Products 2005 2007 Servicing USA and the ROW UNITED KINGDOM Culham
NEXT Exploration Science and Technology Mission. Relevance for Lunar Exploration
 NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
On the feasibility of a fast track return to Mars
 On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
Human Exploration of the Lunar Surface
 International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, GMT
 Friday, October 30, GMT") Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
The European Lunar Lander Mission
 The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
THE SIMULATION OF ONE SIDE OF TETRAHEDRON AIRBAGS IMPACT ATTENUATION SYSTEM
 THE SIMULATION OF ONE SIDE OF TETRAHEDRON AIRBAGS IMPACT ATTENUATION SYSTEM Zhuo Wu (1) (1) Beijing Institution of Space Mechanics and Electrics, PB-9201-3, Beijing, China, Email:wuzhuo82@gmail.com ABSTRACT
THE SIMULATION OF ONE SIDE OF TETRAHEDRON AIRBAGS IMPACT ATTENUATION SYSTEM Zhuo Wu (1) (1) Beijing Institution of Space Mechanics and Electrics, PB-9201-3, Beijing, China, Email:wuzhuo82@gmail.com ABSTRACT
European Lunar Lander: System Engineering Approach
 human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
Suitability of reusability for a Lunar re-supply system
 www.dlr.de Chart 1 Suitability of reusability for a Lunar re-supply system Etienne Dumont Space Launcher Systems Analysis (SART) Institut of Space Systems, Bremen, Germany Etienne.dumont@dlr.de IAC 2016
www.dlr.de Chart 1 Suitability of reusability for a Lunar re-supply system Etienne Dumont Space Launcher Systems Analysis (SART) Institut of Space Systems, Bremen, Germany Etienne.dumont@dlr.de IAC 2016
Space Robotics Planetary Exploration - a DLR Perspective
 Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Lunar Science and Infrastructure with the Future Lunar Lander
 ICEUM9 Sorrento Lunar Science and Infrastructure with the Future Lunar Lander Session 9: Next steps for Robotic Landers, Rovers and Outposts ICEUM9 Sorrento, Oct. 26, 2007 Hansjürgen Günther 26/10/2007
ICEUM9 Sorrento Lunar Science and Infrastructure with the Future Lunar Lander Session 9: Next steps for Robotic Landers, Rovers and Outposts ICEUM9 Sorrento, Oct. 26, 2007 Hansjürgen Günther 26/10/2007
Wheeled Robotic Mobility. Dimi Apostolopoulos
 Wheeled Robotic Mobility Dimi Apostolopoulos Significance of Mobility Move Position Transport Employ instruments and tools React to work loads in a controllable fashion ROBOTIC MOBILITY Dimi Apostolopoulos
Wheeled Robotic Mobility Dimi Apostolopoulos Significance of Mobility Move Position Transport Employ instruments and tools React to work loads in a controllable fashion ROBOTIC MOBILITY Dimi Apostolopoulos
An Overview of CSA s s Space Robotics Activities
 An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration
 National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
Mobile Payload Element (MPE)
") Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
Lunar Architecture and LRO
 Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
MASCOT Marco Polo Surface Scout. Progress Report on Lander Package Study for Marco Polo
 MASCOT Marco Polo Surface Scout Progress Report on Lander Package Study for Marco Polo Lutz Richter 1, Lars Witte 1, Tra-Mi Ho 1, Stephan Ulamec 2, Jean-Pierre Bibring 3 1 DLR Bremen, 2 DLR Cologne, 3
MASCOT Marco Polo Surface Scout Progress Report on Lander Package Study for Marco Polo Lutz Richter 1, Lars Witte 1, Tra-Mi Ho 1, Stephan Ulamec 2, Jean-Pierre Bibring 3 1 DLR Bremen, 2 DLR Cologne, 3
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012
 Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
ANALYSIS ON MECHANICAL PARAMETERS OF LUNAR ROVER WHEEL
 ANALYSIS ON MECHANICAL PARAMETERS OF LUNAR ROVER WHEEL 1,2 DAWEI JIN, 1 JIANQIAO LI, 3 JIANXIN ZHU, 3 CHUNHUA ZHANG 1 Key laboratary of Bionic Engineering (Ministry of Education), Jilin University, Changchu
ANALYSIS ON MECHANICAL PARAMETERS OF LUNAR ROVER WHEEL 1,2 DAWEI JIN, 1 JIANQIAO LI, 3 JIANXIN ZHU, 3 CHUNHUA ZHANG 1 Key laboratary of Bionic Engineering (Ministry of Education), Jilin University, Changchu
Next Steps in Human Exploration: Cislunar Systems and Architectures
 Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection
 Journal of Asian Electric Vehicles, Volume 7, Number 2, December 2009 Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection Koiro
Journal of Asian Electric Vehicles, Volume 7, Number 2, December 2009 Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection Koiro
Loads, Structures, and Mechanisms Design Project ENAE 483 Fall 2012
 Loads, Structures, and Mechanisms Design Project Fall 2012 Stephanie Bilyk Leah Krombach Josh Sloane Michelle Sultzman Mission Specifications Design vehicle for lunar exploration mission 10 day mission
Loads, Structures, and Mechanisms Design Project Fall 2012 Stephanie Bilyk Leah Krombach Josh Sloane Michelle Sultzman Mission Specifications Design vehicle for lunar exploration mission 10 day mission
Innovative Mars exploration rover using inflatable or unfolding wheels
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science
 Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Light-Lift Rocket II
 Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability
 Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability 2007 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar
Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability 2007 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar
OMOTENASHI. (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor)
") SLS EM-1 secondary payload OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) The smallest moon lander launched by the most powerful rocket in the world * Omotenashi
SLS EM-1 secondary payload OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) The smallest moon lander launched by the most powerful rocket in the world * Omotenashi
Challenges of Designing the MarsNEXT Network
 Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil
 Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil By Brian Edwards, Vehicle Dynamics Group, Pratt and Miller Engineering, USA 22 Engineering Reality Magazine Multibody Dynamics
Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil By Brian Edwards, Vehicle Dynamics Group, Pratt and Miller Engineering, USA 22 Engineering Reality Magazine Multibody Dynamics
Traction Performance of Wheel and Track for Soft-Soil Traversal
 ICRA 10 Planetary Rovers Workshop May 3rd, 2010 Traction Performance of Wheel and Track for Soft-Soil Traversal Kazuya Yoshida, Keiji Nagatani, Junya Yusa Tohoku University, Japan Traction Performance
ICRA 10 Planetary Rovers Workshop May 3rd, 2010 Traction Performance of Wheel and Track for Soft-Soil Traversal Kazuya Yoshida, Keiji Nagatani, Junya Yusa Tohoku University, Japan Traction Performance
Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers
 Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers Kojiro Iizuka and Takashi Kubota 2 International Young Researchers Empowerment Center, Shinshu University, iizuka@shinshu-u.ac.jp 2
Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers Kojiro Iizuka and Takashi Kubota 2 International Young Researchers Empowerment Center, Shinshu University, iizuka@shinshu-u.ac.jp 2
Mars 2018 Mission Status and Sample Acquisition Issues
 Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics: Results and Roadmaps
 National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
CHANGING ENTRY, DESCENT, AND LANDING PARADIGMS FOR HUMAN MARS LANDER
 National Aeronautics and Space Administration CHANGING ENTRY, DESCENT, AND LANDING PARADIGMS FOR HUMAN MARS LANDER Alicia Dwyer Cianciolo NASA Langley Research Center 2018 International Planetary Probe
National Aeronautics and Space Administration CHANGING ENTRY, DESCENT, AND LANDING PARADIGMS FOR HUMAN MARS LANDER Alicia Dwyer Cianciolo NASA Langley Research Center 2018 International Planetary Probe
PLANETARY ROVERS WITH MECANUM WHEELS martin.
 PLANETARY ROVERS WITH MECANUM WHEELS Stephen Ransom (1), Olaf Krömer (2) and Martin Lückemeier (3) (1) SRConsultancy, Kiebitzstrasse 31, 28816 Stuhr, Germany e-mail: srconsultancy@freenet.de (2) DLR Institute
PLANETARY ROVERS WITH MECANUM WHEELS Stephen Ransom (1), Olaf Krömer (2) and Martin Lückemeier (3) (1) SRConsultancy, Kiebitzstrasse 31, 28816 Stuhr, Germany e-mail: srconsultancy@freenet.de (2) DLR Institute
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
THE HISTORY OF MARS EXPLORATION
 THE HISTORY OF MARS EXPLORATION Philippe Masson 1st Mars Express Science Conference (ESTEC, February 21-25, 2005) Mars Observers: The European Pioneers Nicolaus Copernicus: described the motion of the
THE HISTORY OF MARS EXPLORATION Philippe Masson 1st Mars Express Science Conference (ESTEC, February 21-25, 2005) Mars Observers: The European Pioneers Nicolaus Copernicus: described the motion of the
Some Thoughts on Simulations in Terramechanics
 Some Thoughts on Simulations in Terramechanics J.Y. Wong Professor Emeritus and Distinguished Research Professor Carleton University and Vehicle Systems Development Corporation Ottawa, Canada Copyright
Some Thoughts on Simulations in Terramechanics J.Y. Wong Professor Emeritus and Distinguished Research Professor Carleton University and Vehicle Systems Development Corporation Ottawa, Canada Copyright
Coupled Aero-Structural Modelling and Optimisation of Deployable Mars Aero-Decelerators
 Coupled Aero-Structural Modelling and Optimisation of Deployable Mars Aero-Decelerators Lisa Peacocke, Paul Bruce and Matthew Santer International Planetary Probe Workshop 11-15 June 2018 Boulder, CO,
Coupled Aero-Structural Modelling and Optimisation of Deployable Mars Aero-Decelerators Lisa Peacocke, Paul Bruce and Matthew Santer International Planetary Probe Workshop 11-15 June 2018 Boulder, CO,
SPARTAN. Date: All rights reserved 2011, Thales Alenia Space. Business Unit Space Infrastructures & Transportation
 SPARTAN Date: Business Unit Space Infrastructures & Transportation February the 17 2011 All rights reserved 2011, Thales Alenia Space Project Overview 2 From 3 rd Fp7 Space Call Grant Agreement n. 262837
SPARTAN Date: Business Unit Space Infrastructures & Transportation February the 17 2011 All rights reserved 2011, Thales Alenia Space Project Overview 2 From 3 rd Fp7 Space Call Grant Agreement n. 262837
Martian In Situ Investigations
 Mars MetNet Mission and Payload Precursors Martian In Situ Investigations Saariselkä, 30.3.2017 EuroPlanet Workshop Dr. Ari-Matti Harri Finnish Meteorological Institute Finnish Meteorological Institute,
Mars MetNet Mission and Payload Precursors Martian In Situ Investigations Saariselkä, 30.3.2017 EuroPlanet Workshop Dr. Ari-Matti Harri Finnish Meteorological Institute Finnish Meteorological Institute,
 Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
Name: Space Exploration PBL
 Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
RIMRES: A project summary
 RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
Formation Flying Experiments on the Orion-Emerald Mission. Introduction
 Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
ASTRIUM. Lunar Lander Concept for LIFE. Hansjürgen Günther TOB 11. Bremen, 23/
 Lunar Lander Concept for LIFE Hansjürgen Günther TOB 11 Bremen, 23/24.11.2006 This document is the property of EADS SPACE. It shall not be communicated to third parties without prior written agreement.its
Lunar Lander Concept for LIFE Hansjürgen Günther TOB 11 Bremen, 23/24.11.2006 This document is the property of EADS SPACE. It shall not be communicated to third parties without prior written agreement.its
Robots to Support a Human Mars Mission
 Robots to Support a Human Mars Mission 1 W. Naumann, P. Hofmann, A. v. Richter Kayser-Threde GmbH Wolfratshauser Str. 48, D-81379 München email: andreas.von.richter@kayser-threde.com 7th Workshop ASTRA
Robots to Support a Human Mars Mission 1 W. Naumann, P. Hofmann, A. v. Richter Kayser-Threde GmbH Wolfratshauser Str. 48, D-81379 München email: andreas.von.richter@kayser-threde.com 7th Workshop ASTRA
Planetary Surface Transportation and Site Development
 Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
Lunar Missions by Year - All Countries. Mission count dropped as we transitioned from politically driven missions to science driven missions
 n Lunar Missions by Year - All Countries Key: All Mission Attempts Mission Successes Mission count dropped as we transitioned from politically driven missions to science driven missions Capability Driven
n Lunar Missions by Year - All Countries Key: All Mission Attempts Mission Successes Mission count dropped as we transitioned from politically driven missions to science driven missions Capability Driven
How to Assess Heritage Systems in the Early Phases? Andreas M. Hein
 How to Assess Heritage Systems in the Early Phases? Andreas M. Hein SECESA 2014 11/8/2014 SECESA 2014 2 1. Motivation Sample mission success / cost & schedule overrun / failure attributed to heritage use:
How to Assess Heritage Systems in the Early Phases? Andreas M. Hein SECESA 2014 11/8/2014 SECESA 2014 2 1. Motivation Sample mission success / cost & schedule overrun / failure attributed to heritage use:
Canadian Lunar & Planetary Rover. Development
 Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
A Grouser Spacing Equation for Determining Appropriate Geometry of Planetary Rover Wheels
 A Grouser Spacing Equation for Determining Appropriate Geometry of Planetary Rover Wheels Krzysztof Skonieczny, Scott J. Moreland, and David S. Wettergreen Abstract Grousers, sometimes called lugs, are
A Grouser Spacing Equation for Determining Appropriate Geometry of Planetary Rover Wheels Krzysztof Skonieczny, Scott J. Moreland, and David S. Wettergreen Abstract Grousers, sometimes called lugs, are
Autonomous Sample Acquisition for the ExoMars Rover
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Autonomous Sample Acquisition for
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Autonomous Sample Acquisition for
Research Issues and Results to Date" on Robotic Exploration of Mars!
 Research Issues and Results to Date" on! Larry Matthies! Computer Vision Group! California Institute of Technology! Science Themes for Mars Exploration! W A T E R Look for Life Understand Climate Explore
Research Issues and Results to Date" on! Larry Matthies! Computer Vision Group! California Institute of Technology! Science Themes for Mars Exploration! W A T E R Look for Life Understand Climate Explore
Test Facility for Sampler Drills and Distribution Tools
 Aerospace Engineering Department Test Facility for Sampler Drills and Distribution Tools C. Dainese, F. Malnati, A. Ercoli Finzi, G. Sangiovanni The past Small Sample Acquisition and Distribution Tool
Aerospace Engineering Department Test Facility for Sampler Drills and Distribution Tools C. Dainese, F. Malnati, A. Ercoli Finzi, G. Sangiovanni The past Small Sample Acquisition and Distribution Tool
Landing Targets and Technical Subjects for SELENE-2
 Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE
 LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE ABSTRACT With 1 rover, 2 astronauts and 3 days, the Apollo 17 Mission covered over 30 km, setup
LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE ABSTRACT With 1 rover, 2 astronauts and 3 days, the Apollo 17 Mission covered over 30 km, setup
Curiosity lands on Mars
 Curiosity lands on Mars Early Monday morning (August 6, 2012), the Mars rover named Curiosity successfully landed on the surface of Mars. The rover launched on November 26 th, 2011 and traveled for 8 ½
Curiosity lands on Mars Early Monday morning (August 6, 2012), the Mars rover named Curiosity successfully landed on the surface of Mars. The rover launched on November 26 th, 2011 and traveled for 8 ½
Design of Mobility System for Ground Model of Planetary Exploration Rover
 Technical Paper J. Astron. Space Sci. 29(4), 413-422 (2012) Design of Mobility System for Ground Model of Planetary Exploration Rover Younkyu Kim 1, Wesub Eom 1, Joo-Hee Lee 1, 2, and Eun-Sup Sim 1 1 Aerospace
Technical Paper J. Astron. Space Sci. 29(4), 413-422 (2012) Design of Mobility System for Ground Model of Planetary Exploration Rover Younkyu Kim 1, Wesub Eom 1, Joo-Hee Lee 1, 2, and Eun-Sup Sim 1 1 Aerospace
DYNAMIC SIMULATION OF MARS-03 ENTRY, DESCENT AND LANDING SYSTEM
 DYNAMIC SIMULATION OF MARS-03 ENTRY, DESCENT AND LANDING SYSTEM Chia-Yen Peng and Walter Tsuha Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive Pasadena, CA 91109 ABSTRACT.
DYNAMIC SIMULATION OF MARS-03 ENTRY, DESCENT AND LANDING SYSTEM Chia-Yen Peng and Walter Tsuha Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive Pasadena, CA 91109 ABSTRACT.
Performance Evaluation of Wheeled Rover by Analysis and Test
 Performance Evaluation of Wheeled Rover by Analysis and Test Gaurav Sharma, Srividhya G., Shamrao, K. Balaji, G. Nagesh, C.D. Sridhara Abstract Rovers provide a mobile platform for exploring planetary
Performance Evaluation of Wheeled Rover by Analysis and Test Gaurav Sharma, Srividhya G., Shamrao, K. Balaji, G. Nagesh, C.D. Sridhara Abstract Rovers provide a mobile platform for exploring planetary
MASCOT Asteroid Lander with innovative Mobility Mechanism
 www.dlr.de Slide 1 MASCOT Asteroid Lander with innovative Mobility Mechanism Dr. Josef Reill German Aerospace Center - DLR Institute of Robotics and Mechatronics Team-Members: Josef Reill Hans-Jürgen Sedlmayr
www.dlr.de Slide 1 MASCOT Asteroid Lander with innovative Mobility Mechanism Dr. Josef Reill German Aerospace Center - DLR Institute of Robotics and Mechatronics Team-Members: Josef Reill Hans-Jürgen Sedlmayr
Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing
 Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing Therese Griebel NASA Glenn Research Center 1 Overview Current developments in technology that could meet NASA, DOD and commercial
Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing Therese Griebel NASA Glenn Research Center 1 Overview Current developments in technology that could meet NASA, DOD and commercial
WHAT WE WILL DISCUSS IN THIS VIDEO
 WHAT WE WILL DISCUSS IN THIS VIDEO What is Chandrayaan 2 all about? Why is it special? Have we entered the The Asian space race? Where do China, Japan and India stand? What is the importance of the moon?
WHAT WE WILL DISCUSS IN THIS VIDEO What is Chandrayaan 2 all about? Why is it special? Have we entered the The Asian space race? Where do China, Japan and India stand? What is the importance of the moon?
Resource Prospector Traverse Planning
 Resource Prospector Traverse Planning Jennifer Heldmann (NASA Ames / NASA Headquarters) Anthony Colaprete (NASA Ames Research Center) Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters)
Resource Prospector Traverse Planning Jennifer Heldmann (NASA Ames / NASA Headquarters) Anthony Colaprete (NASA Ames Research Center) Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters)
Historical Perspectives: Evolution of Recent Mars EDL Systems Development. 6th International Planetary Probe Workshop June 2008 Erisa K Hines
 Historical Perspectives: Evolution of Recent Mars EDL Systems Development 6th International Planetary Probe Workshop 23-27 June 2008 Erisa K Hines Overview An examination of the EDL system engineering
Historical Perspectives: Evolution of Recent Mars EDL Systems Development 6th International Planetary Probe Workshop 23-27 June 2008 Erisa K Hines Overview An examination of the EDL system engineering
Results of the Airbus DS led e.deorbit Phase B1 ESA study. Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, October 2017
 Results of the Airbus DS led e.deorbit Phase B1 ESA study Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, 24-26 October 2017 2 e.deorbit Mission Final rendezvous and capture phase Phase B1 Team
Results of the Airbus DS led e.deorbit Phase B1 ESA study Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, 24-26 October 2017 2 e.deorbit Mission Final rendezvous and capture phase Phase B1 Team
Chassis Concepts for the ExoMars Rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
This is Ground Control... Professor Derek Long Department of Informatics King s College London
 This is Ground Control... Professor Derek Long Department of Informatics King s College London Deep in Space... Rosetta and Philae 67P/Churyumov-Gerasimenko Launch 2004, arrive 2014 Mars Express 2003 Mars
This is Ground Control... Professor Derek Long Department of Informatics King s College London Deep in Space... Rosetta and Philae 67P/Churyumov-Gerasimenko Launch 2004, arrive 2014 Mars Express 2003 Mars
Development of Legged, Wheeled, and Hybrid Rover Mobility Models to Facilitate Planetary Surface Exploration Mission Analysis
 Development of Legged, Wheeled, and Hybrid Rover Mobility Models to Facilitate Planetary Surface Exploration Mission Analysis by Scott H. McCloskey B.S., Aerospace Engineering University of Arizona, 2005
Development of Legged, Wheeled, and Hybrid Rover Mobility Models to Facilitate Planetary Surface Exploration Mission Analysis by Scott H. McCloskey B.S., Aerospace Engineering University of Arizona, 2005
On the potential application of a numerical optimization of fatigue life with DoE and FEM
 On the potential application of a numerical optimization of fatigue life with DoE and FEM H.Y. Miao and M. Lévesque Département de Génie Mécanique, École Polytechnique de Montréal, Canada Abstract Shot
On the potential application of a numerical optimization of fatigue life with DoE and FEM H.Y. Miao and M. Lévesque Département de Génie Mécanique, École Polytechnique de Montréal, Canada Abstract Shot
Lunette: A Global Network of Small Lunar Landers
 Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Space Exploration Via Technology Demonstration and Small Satellite Missions Flown on Reusable Launch Vehicles SSC04-X-8.
 Space Exploration Via Technology Demonstration and Small Satellite Missions Flown on Reusable Launch Vehicles SSC04-X-8 Presented to: Utah State Small Satellite Conference Logan, Utah August 12, 2004 Debra
Space Exploration Via Technology Demonstration and Small Satellite Missions Flown on Reusable Launch Vehicles SSC04-X-8 Presented to: Utah State Small Satellite Conference Logan, Utah August 12, 2004 Debra
Ironless Core DC Motors for Aerospace
 Ironless Core DC Motors for Aerospace Market segments covered by AS/EN9100 Support equipment Space shuttle & re entry vehicles Aviation Commercial passenger aircraft Light aircraft Cabin equipment Science
Ironless Core DC Motors for Aerospace Market segments covered by AS/EN9100 Support equipment Space shuttle & re entry vehicles Aviation Commercial passenger aircraft Light aircraft Cabin equipment Science
Development of the ExoMars Chassis and Locomotion Subsystem
 Development of the ExoMars Chassis and Locomotion Subsystem S. Michaud (1), A. Gibbesch (2), T. Thueer (3), A. Krebs (3), C. Lee (4), B. Despont (1), B. Schäfer (2), R. Slade (5) (1) Oerlikon Space AG
Development of the ExoMars Chassis and Locomotion Subsystem S. Michaud (1), A. Gibbesch (2), T. Thueer (3), A. Krebs (3), C. Lee (4), B. Despont (1), B. Schäfer (2), R. Slade (5) (1) Oerlikon Space AG
Phoenix Lander Implications on in situ resource utilization for robotic exploration of Mars
 Phoenix Landing Site May 2008 Phoenix Lander Implications on in situ resource utilization for robotic exploration of Mars LEAG-ICEUM-SRR (2008) Cape Canaveral, FL Robert L. Ash October 29, 2008 Aerospace
Phoenix Landing Site May 2008 Phoenix Lander Implications on in situ resource utilization for robotic exploration of Mars LEAG-ICEUM-SRR (2008) Cape Canaveral, FL Robert L. Ash October 29, 2008 Aerospace
An Integrated Process for FDIR Design in Aerospace
 An Integrated Process for FDIR Design in Aerospace Fondazione Bruno Kessler, Trento, Italy Benjamin Bittner, Marco Bozzano, Alessandro Cimatti, Marco Gario Thales Alenia Space,France Regis de Ferluc Thales
An Integrated Process for FDIR Design in Aerospace Fondazione Bruno Kessler, Trento, Italy Benjamin Bittner, Marco Bozzano, Alessandro Cimatti, Marco Gario Thales Alenia Space,France Regis de Ferluc Thales
ULA Briefing to National Research Council. In-Space Propulsion Roadmap. March 22, Bernard Kutter. Manager Advanced Programs. File no.
 ULA Briefing to National Research Council In-Space Propulsion Roadmap March 22, 2011 Bernard Kutter Manager Advanced Programs File no. Copyright 2011 United Launch Alliance, LLC. All Rights Reserved. Key
ULA Briefing to National Research Council In-Space Propulsion Roadmap March 22, 2011 Bernard Kutter Manager Advanced Programs File no. Copyright 2011 United Launch Alliance, LLC. All Rights Reserved. Key
A combined Exobiology and Geophysics Mission to Mars
 A combined Exobiology and Geophysics Mission to Mars 2009 Colin Pillinger (OU) Mark Sims (Leicester) T. Spohn, L. Richter (DLR Germany) S. Hurst, R. Slade, S. Kemble (EADS Astrium) D. Northey, P. Taylor,
A combined Exobiology and Geophysics Mission to Mars 2009 Colin Pillinger (OU) Mark Sims (Leicester) T. Spohn, L. Richter (DLR Germany) S. Hurst, R. Slade, S. Kemble (EADS Astrium) D. Northey, P. Taylor,
DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN
 Ready 12th Symposium on Advance Space Technologies in Robotics and Automation, ESA / ESTEC, Noordwijk, The Nethelands DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN Shivesh Kumar, Raghavendra
Ready 12th Symposium on Advance Space Technologies in Robotics and Automation, ESA / ESTEC, Noordwijk, The Nethelands DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN Shivesh Kumar, Raghavendra
RESULTS of ESA/ESTEC and VNII Transmash & RCL joint ACTIVITIES AIMED at PLANETARY ROVERS DEVELOPMENT
 In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 RESULTS of and VNII Transmash &
In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 RESULTS of and VNII Transmash &
Fluidic Stochastic Modular Robotics: Revisiting the System Design
 Fluidic Stochastic Modular Robotics: Revisiting the System Design Viktor Zykov Hod Lipson Computational Synthesis Cornell University Grand Challenges in the Area of Self-Reconfigurable Modular Robots Self-repair
Fluidic Stochastic Modular Robotics: Revisiting the System Design Viktor Zykov Hod Lipson Computational Synthesis Cornell University Grand Challenges in the Area of Self-Reconfigurable Modular Robots Self-repair
Evaluation of sealing performance of metal. CRIEPI (Central Research Institute of Electric Power Industry)
") 0 Evaluation of sealing performance of metal gasket used in dual purpose metal cask subjected to an aircraft engine missile CRIEPI (Central Research Institute of Electric Power Industry) K. SHIRAI These
0 Evaluation of sealing performance of metal gasket used in dual purpose metal cask subjected to an aircraft engine missile CRIEPI (Central Research Institute of Electric Power Industry) K. SHIRAI These
Brüel & Kjær and LDS The Perfect Match SHORT FORM CATALOGUE
 Brüel & Kjær and LDS The Perfect Match SHORT FORM CATALOGUE 4 Aerospace For any aircraft, helicopter, space vehicle or ballistic device, reliability is the number one priority. By using our vibration test
Brüel & Kjær and LDS The Perfect Match SHORT FORM CATALOGUE 4 Aerospace For any aircraft, helicopter, space vehicle or ballistic device, reliability is the number one priority. By using our vibration test
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return
 Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
Research on Skid Control of Small Electric Vehicle (Effect of Velocity Prediction by Observer System)
") Proc. Schl. Eng. Tokai Univ., Ser. E (17) 15-1 Proc. Schl. Eng. Tokai Univ., Ser. E (17) - Research on Skid Control of Small Electric Vehicle (Effect of Prediction by Observer System) by Sean RITHY *1
Proc. Schl. Eng. Tokai Univ., Ser. E (17) 15-1 Proc. Schl. Eng. Tokai Univ., Ser. E (17) - Research on Skid Control of Small Electric Vehicle (Effect of Prediction by Observer System) by Sean RITHY *1
System Testing by Flight Operators the Rosetta Experience
 European Space Operations Center System Testing by Flight Operators the Rosetta Experience E. Montagnon, P. Ferri, L. O Rourke, A. Accomazzo, I. Tanco, J. Morales, M. Sweeney Spaceops 2004, Montréal, Canada,
European Space Operations Center System Testing by Flight Operators the Rosetta Experience E. Montagnon, P. Ferri, L. O Rourke, A. Accomazzo, I. Tanco, J. Morales, M. Sweeney Spaceops 2004, Montréal, Canada,
EVALUATION OF INFLUENCE OF WHEEL SURFACE SHAPES ON TRACTIVE EFFICIENCIES OF PLANETARY ROVERS IN VARIOUS SOIL ENVIRONMENTS
 EVALUATION OF INFLUENCE OF WHEEL SURFACE SHAPES ON TRACTIVE EFFICIENCIES OF PLANETARY ROVERS IN VARIOUS SOIL ENVIRONMENTS Masataku Sutoh, Kenji Nagaoka, Keiji Nagatani, and Kazuya Yoshida Department of
EVALUATION OF INFLUENCE OF WHEEL SURFACE SHAPES ON TRACTIVE EFFICIENCIES OF PLANETARY ROVERS IN VARIOUS SOIL ENVIRONMENTS Masataku Sutoh, Kenji Nagaoka, Keiji Nagatani, and Kazuya Yoshida Department of
LUNAR INDUSTRIAL RESEARCH BASE. Yuzhnoye SDO proprietary
 LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
The Common Spacecraft Bus and Lunar Commercialization
 The Common Spacecraft Bus and Lunar Commercialization Alex MacDonald NASA Ames Research Center alex.macdonald@balliol.ox.ac.uk Will Marshall NASA Ames Research Center william.s.marshall@nasa.gov Summary
The Common Spacecraft Bus and Lunar Commercialization Alex MacDonald NASA Ames Research Center alex.macdonald@balliol.ox.ac.uk Will Marshall NASA Ames Research Center william.s.marshall@nasa.gov Summary
Europa Lander. Mission Concept Update 3/29/2017
 Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
Hydraulic Flywheel Accumulator for Mobile Energy Storage
 Hydraulic Flywheel Accumulator for Mobile Energy Storage Paul Cronk University of Minnesota October 14 th, 2015 I. Overview Outline I. Background on Mobile Energy Storage II. Hydraulic Flywheel Accumulator
Hydraulic Flywheel Accumulator for Mobile Energy Storage Paul Cronk University of Minnesota October 14 th, 2015 I. Overview Outline I. Background on Mobile Energy Storage II. Hydraulic Flywheel Accumulator
Chapter 7: Thermal Study of Transmission Gearbox
 Chapter 7: Thermal Study of Transmission Gearbox 7.1 Introduction The main objective of this chapter is to investigate the performance of automobile transmission gearbox under the influence of load, rotational
Chapter 7: Thermal Study of Transmission Gearbox 7.1 Introduction The main objective of this chapter is to investigate the performance of automobile transmission gearbox under the influence of load, rotational
Long-Range Rovers for Mars Exploration and Sample Return
 2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
Analysis of Architectures for Long-Range Crewed Moon and Mars Surface Mobility
 AIAA SPACE 2008 Conference & Exposition 9-11 September 2008, San Diego, California AIAA 2008-7914 Analysis of Architectures for Long-Range Crewed Moon and Mars Surface Mobility Wilfried K. Hofstetter 1,
AIAA SPACE 2008 Conference & Exposition 9-11 September 2008, San Diego, California AIAA 2008-7914 Analysis of Architectures for Long-Range Crewed Moon and Mars Surface Mobility Wilfried K. Hofstetter 1,
The Mobility System Wheel Design for NASA s Mars Science Laboratory Mission
 The Mobility System Wheel Design for NASA s Mars Science Laboratory Mission S. Haggart; J. Waydo Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA, USA 1. Abstract / Introduction
The Mobility System Wheel Design for NASA s Mars Science Laboratory Mission S. Haggart; J. Waydo Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA, USA 1. Abstract / Introduction
The Mars Express Mission A Continuing Challenge. Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner
 The Mars Express Mission A Continuing Challenge Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner Mars Society, Munich, 13 October, 2012 The Mars Express Mission - a First in
The Mars Express Mission A Continuing Challenge Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner Mars Society, Munich, 13 October, 2012 The Mars Express Mission - a First in