The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity
|
|
|
- Meagan Henderson
- 6 years ago
- Views:
Transcription
1 The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D Cologne, Germany 2: Contraves Space, CH-8052 Zurich, Switzerland 3: ESA-ESTEC TOS-MMM, NL-2200 Noordwijk AG, The Netherlands
2 On-going technology development within ESA TRP: several technology development activities for small vehicles for planetary surface mobility one of these: MIDD (Mobile Instrument Deployment Device): mechanical components for small wheeled devices, and the study of general planetary surface locomotion problems: how can tractive performance reliably be predicted, taking into account available data on planetary soils and the gravity level? how can rover chassis be sized to account for rock distributions in the terrain? following development & environmental testing (dust, temperature, vacuum) of critical drive train mechanisms ( timeframe), MIDD has produced: tractive theory for small wheels as well as the system design & BB model of a small 4- wheeler for a Mars reference application, to be used for systemlevel locomotion investigations
3 MIDD reference scenario short range (a few 10 s of m), tethered mobile platform for deployment of surface and subsurface instruments and subsurface sampling equipment ( Mole ) on Mars; overall mass including instrumentation: 4 kg MIDD to carry 2 spectrometers for rock & soil studies close-up imager for rock studies dust removal device to support rock studies self-penetrating subsurface sampler ( Mole ) for acquisition of soil samples and transfer to lander corresponding vehicle system design - utilizing the previously developed component technologies - based on: instrument accommodation, planetary surface properties, theory for predicting tractive performance of small wheels
4 Surface properties: rock distributi- on Observed rock separations for Moon & Mars (Moon: LUNOKHOD observations; Mars: VL-2 site, being rockier than 95 % of Martian surface) Lunar, type A Mars, VL Rock size D [cm]
5 Surface properties: soil Martian soil mechanical simulant at : n [-] Determined mechanical parameters relevant for tractive predictions: P arameter k ϕ [Nm -(n+2) ] k c [Nm -(n+1) ] V al ue * *10 3 c [Pa] 441 φ [ ] 17.8 K [mm] 0.33 ρ [gcm -3 ] Grain size [µm]
6 Mean straight path for given chassis (ground clearance, number of axles, axle articulation, wheel diameter) and given rock distribution: Mean Straight Path (MSP) that can be driven before an insurmountable rock is encountered for a given rock distribution, required MSP linked to: specified total vehicle path length and mission duration (thus to mean motion speed in the terrain) degree of vehicle intelligence for autonomous obstacle avoidance frequency of communication links to Earth required for commanded obstacle avoidance the shorter the required MSP, the more simple (and more lightweight!) the chassis can be mobile device for Mars with mission duration of 90 days and one communications session with Earth per 24 h, with required total driven distance of 50 m and no autonomous obstacle avoidance: MSP of only cm required
7 MIDD chassis layout sized to offer MSP of 50 cm in VL-2 rock distribution chassis: 4 rigid wheels with rigid suspension front wheels on articulated levers for instrument pointing, stowage, vehicle re-righting skid-steering motion speed 1 mm/s wheel dimensions: ø 160 mm, b=22 mm stowage envelope: 350 mm L x 260 mm W x 380 mm height wheels and front wheel levers individually driven by brushless DC motors central thermal enclosure for protecting electronics and drives from ambient temperature cycles ( -80 C/0 C) tether link to lander for power supply and communications: flex circuit segments, extracted through vehicle motion
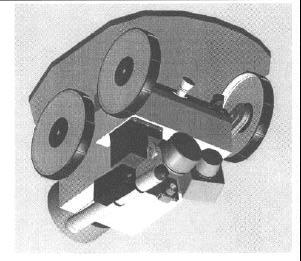
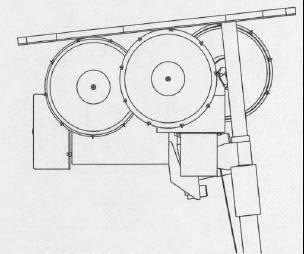
8 Vehicle configuration & articulation
9 Chassis detailed design mechanism technology based on Study s Slice I ( 96-97) which had involved Thermal Vacuum testing & dust sealing tests (simulated airborne fines of Martian atmosphere)
10 Wheel performance verification key performance parameters: sinkage rolling resistance gross pull vs. slip skid behavior Testing of MIDD wheel in soil channel performance is verified by single wheel testing in a soil channel at at representative wheel loading in soil simulant strength of soil simulant: dependence on gravity is predictable, but small (due to fine-grained clay/silt-like material) test data compared to predictions using theory for small wheels & small wheel loads
11 Predicted vehicle performance under Martian gravity using the developed, experimentally verified tractive theory for small wheels, slope climbing capability of the vehicle - with all four wheels driven - is predicted on Martian soil at Mars gravity, for different vehicle masses: Effect of gravity on soil neglected Effect of gravity on soil taken into account Max. negotiable slope on Mars soil [ ] M=3.2 kg M=4.5 kg M=6.5 kg Max. negotiable slope on Mars soil [ ] M=3.2 kg M=4.5 kg M=6.5 kg Wheel slip i* [-] Wheel slip i* [-] performance can be further enhanced by: higher wheel grousers; introduction of flexible wheels
12 Conclusions experimentally validated tractive theory for small wheeled planetary vehicles has been developed tractive performance of small wheels at small wheel loads can be reliably predicted the effect of gravity on the soil material can be predicted chassis sizing for a given terrain (soil properties & rock distribution, gravity level) and given mission requirements can be rationally performed by applying the developed tractive theory specification of an appropriate Mean Straight Path MIDD BB model serves as testbed for system-level locomotion testing and as a viable example of a short-range mobile device for in-situ measurements on planetary surface and subsurface materials and for subsurface sampling
Innovative Mars exploration rover using inflatable or unfolding wheels
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
A New Facility for Lander Touchdown and Rover Mobility Testing at DLR
 A New Facility for Lander Touchdown and Rover Mobility Testing at DLR Lutz Richter, Antje Brucks, Lars Witte DLR Institute of Space Systems, Bremen, Germany New DLR Institute of Space Systems Systems Analysis
A New Facility for Lander Touchdown and Rover Mobility Testing at DLR Lutz Richter, Antje Brucks, Lars Witte DLR Institute of Space Systems, Bremen, Germany New DLR Institute of Space Systems Systems Analysis
Chassis Concepts for the ExoMars Rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
Some Thoughts on Simulations in Terramechanics
 Some Thoughts on Simulations in Terramechanics J.Y. Wong Professor Emeritus and Distinguished Research Professor Carleton University and Vehicle Systems Development Corporation Ottawa, Canada Copyright
Some Thoughts on Simulations in Terramechanics J.Y. Wong Professor Emeritus and Distinguished Research Professor Carleton University and Vehicle Systems Development Corporation Ottawa, Canada Copyright
Light-Lift Rocket II
 Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return
 Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
Development of the ExoMars Chassis and Locomotion Subsystem
 Development of the ExoMars Chassis and Locomotion Subsystem S. Michaud (1), A. Gibbesch (2), T. Thueer (3), A. Krebs (3), C. Lee (4), B. Despont (1), B. Schäfer (2), R. Slade (5) (1) Oerlikon Space AG
Development of the ExoMars Chassis and Locomotion Subsystem S. Michaud (1), A. Gibbesch (2), T. Thueer (3), A. Krebs (3), C. Lee (4), B. Despont (1), B. Schäfer (2), R. Slade (5) (1) Oerlikon Space AG
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, GMT
 Friday, October 30, GMT") Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN
 Ready 12th Symposium on Advance Space Technologies in Robotics and Automation, ESA / ESTEC, Noordwijk, The Nethelands DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN Shivesh Kumar, Raghavendra
Ready 12th Symposium on Advance Space Technologies in Robotics and Automation, ESA / ESTEC, Noordwijk, The Nethelands DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN Shivesh Kumar, Raghavendra
European Lunar Lander: System Engineering Approach
 human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science
 Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection
 Journal of Asian Electric Vehicles, Volume 7, Number 2, December 2009 Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection Koiro
Journal of Asian Electric Vehicles, Volume 7, Number 2, December 2009 Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection Koiro
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
An Overview of CSA s s Space Robotics Activities
 An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
Space Robotics Planetary Exploration - a DLR Perspective
 Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
The European Lunar Lander Mission
 The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
Robots to Support a Human Mars Mission
 Robots to Support a Human Mars Mission 1 W. Naumann, P. Hofmann, A. v. Richter Kayser-Threde GmbH Wolfratshauser Str. 48, D-81379 München email: andreas.von.richter@kayser-threde.com 7th Workshop ASTRA
Robots to Support a Human Mars Mission 1 W. Naumann, P. Hofmann, A. v. Richter Kayser-Threde GmbH Wolfratshauser Str. 48, D-81379 München email: andreas.von.richter@kayser-threde.com 7th Workshop ASTRA
Canadian Lunar & Planetary Rover. Development
 Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
RESULTS of ESA/ESTEC and VNII Transmash & RCL joint ACTIVITIES AIMED at PLANETARY ROVERS DEVELOPMENT
 In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 RESULTS of and VNII Transmash &
In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 RESULTS of and VNII Transmash &
Design of Mobility System for Ground Model of Planetary Exploration Rover
 Technical Paper J. Astron. Space Sci. 29(4), 413-422 (2012) Design of Mobility System for Ground Model of Planetary Exploration Rover Younkyu Kim 1, Wesub Eom 1, Joo-Hee Lee 1, 2, and Eun-Sup Sim 1 1 Aerospace
Technical Paper J. Astron. Space Sci. 29(4), 413-422 (2012) Design of Mobility System for Ground Model of Planetary Exploration Rover Younkyu Kim 1, Wesub Eom 1, Joo-Hee Lee 1, 2, and Eun-Sup Sim 1 1 Aerospace
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012
 Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
From MARS To MOON. V. Giorgio Director of Italian Programs. Sorrento, October, All rights reserved, 2007, Thales Alenia Space
 From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers
 Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers Kojiro Iizuka and Takashi Kubota 2 International Young Researchers Empowerment Center, Shinshu University, iizuka@shinshu-u.ac.jp 2
Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers Kojiro Iizuka and Takashi Kubota 2 International Young Researchers Empowerment Center, Shinshu University, iizuka@shinshu-u.ac.jp 2
Wheeled Robotic Mobility. Dimi Apostolopoulos
 Wheeled Robotic Mobility Dimi Apostolopoulos Significance of Mobility Move Position Transport Employ instruments and tools React to work loads in a controllable fashion ROBOTIC MOBILITY Dimi Apostolopoulos
Wheeled Robotic Mobility Dimi Apostolopoulos Significance of Mobility Move Position Transport Employ instruments and tools React to work loads in a controllable fashion ROBOTIC MOBILITY Dimi Apostolopoulos
Performance Evaluation of Wheeled Rover by Analysis and Test
 Performance Evaluation of Wheeled Rover by Analysis and Test Gaurav Sharma, Srividhya G., Shamrao, K. Balaji, G. Nagesh, C.D. Sridhara Abstract Rovers provide a mobile platform for exploring planetary
Performance Evaluation of Wheeled Rover by Analysis and Test Gaurav Sharma, Srividhya G., Shamrao, K. Balaji, G. Nagesh, C.D. Sridhara Abstract Rovers provide a mobile platform for exploring planetary
On the feasibility of a fast track return to Mars
 On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
Autonomous Sample Acquisition for the ExoMars Rover
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Autonomous Sample Acquisition for
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Autonomous Sample Acquisition for
PLANETARY ROVERS WITH MECANUM WHEELS martin.
 PLANETARY ROVERS WITH MECANUM WHEELS Stephen Ransom (1), Olaf Krömer (2) and Martin Lückemeier (3) (1) SRConsultancy, Kiebitzstrasse 31, 28816 Stuhr, Germany e-mail: srconsultancy@freenet.de (2) DLR Institute
PLANETARY ROVERS WITH MECANUM WHEELS Stephen Ransom (1), Olaf Krömer (2) and Martin Lückemeier (3) (1) SRConsultancy, Kiebitzstrasse 31, 28816 Stuhr, Germany e-mail: srconsultancy@freenet.de (2) DLR Institute
ParcelBot A Tracked Parcel Transporter with High Obstacle Negotiation Capabilities
 Research Collection Conference Paper ParcelBot A Tracked Parcel Transporter with High Obstacle Negotiation Capabilities Author(s): Hoepflinger, Mark H.; Baschung, David; Remy, C. D.; Hutter, Marco; Siegwart,
Research Collection Conference Paper ParcelBot A Tracked Parcel Transporter with High Obstacle Negotiation Capabilities Author(s): Hoepflinger, Mark H.; Baschung, David; Remy, C. D.; Hutter, Marco; Siegwart,
Mobile Payload Element (MPE)
") Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil
 Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil By Brian Edwards, Vehicle Dynamics Group, Pratt and Miller Engineering, USA 22 Engineering Reality Magazine Multibody Dynamics
Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil By Brian Edwards, Vehicle Dynamics Group, Pratt and Miller Engineering, USA 22 Engineering Reality Magazine Multibody Dynamics
Field Robotics Center, The Robotics Institute Carnegie Mellon University Pittsburgh PA Phone: (412) ; Fax: (412)
 ; Fax: (412)") Effect of Tire Design and Steering Mode on Robotic Mobility in Barren Terrain Ben Shamah, Dimi Apostolopoulos, Michael Wagner, William Red Whittaker email: {bshamah, da1v, mwagner, red}@ri.cmu.edu Field
Effect of Tire Design and Steering Mode on Robotic Mobility in Barren Terrain Ben Shamah, Dimi Apostolopoulos, Michael Wagner, William Red Whittaker email: {bshamah, da1v, mwagner, red}@ri.cmu.edu Field
EVALUATION OF INFLUENCE OF WHEEL SURFACE SHAPES ON TRACTIVE EFFICIENCIES OF PLANETARY ROVERS IN VARIOUS SOIL ENVIRONMENTS
 EVALUATION OF INFLUENCE OF WHEEL SURFACE SHAPES ON TRACTIVE EFFICIENCIES OF PLANETARY ROVERS IN VARIOUS SOIL ENVIRONMENTS Masataku Sutoh, Kenji Nagaoka, Keiji Nagatani, and Kazuya Yoshida Department of
EVALUATION OF INFLUENCE OF WHEEL SURFACE SHAPES ON TRACTIVE EFFICIENCIES OF PLANETARY ROVERS IN VARIOUS SOIL ENVIRONMENTS Masataku Sutoh, Kenji Nagaoka, Keiji Nagatani, and Kazuya Yoshida Department of
NEXT Exploration Science and Technology Mission. Relevance for Lunar Exploration
 NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration
 National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
Robots from Junk. Vocabulary autonomous, center of mass, lander, robotics, rover
 Robots from Junk Teacher Background The Pathfinder rover, Sojourner, was once called the "Microrover Flight Experiment." It was designed to test the design and performance of rovers, as well as to do some
Robots from Junk Teacher Background The Pathfinder rover, Sojourner, was once called the "Microrover Flight Experiment." It was designed to test the design and performance of rovers, as well as to do some
EUROBOT EVA-assistant robot for ISS
 In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 EUROBOT EVA-assistant robot for
In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 EUROBOT EVA-assistant robot for
T1255 TERRAIN LEVELER
 T H E V E R M E E R D E A L E R N E T W O R K : R E L I A B L E S U P P O R T, A L L O V E R T H E W O R L D. Vermeer Asia Pacific Singapore 608586 Phone: +65 6516 9560 Fax: +65 6515 9218 Vermeer Corporation
T H E V E R M E E R D E A L E R N E T W O R K : R E L I A B L E S U P P O R T, A L L O V E R T H E W O R L D. Vermeer Asia Pacific Singapore 608586 Phone: +65 6516 9560 Fax: +65 6515 9218 Vermeer Corporation
Benefit of Push-pull Locomotion for Planetary Rover Mobility
 Benefit of Push-pull Locomotion for Planetary Rover Mobility C. Creager 1, S. Moreland 2, K. Skonieczny 3, K. Johnson 4, V. Asnani 5, R. Gilligan 6 1 NASA Glenn Research Center, Mail Stop 23-3, 21000 Brookpark
Benefit of Push-pull Locomotion for Planetary Rover Mobility C. Creager 1, S. Moreland 2, K. Skonieczny 3, K. Johnson 4, V. Asnani 5, R. Gilligan 6 1 NASA Glenn Research Center, Mail Stop 23-3, 21000 Brookpark
T1255 TERRAIN LEVELER SEM T1255 TERRAIN LEVELER
 T1255 TERRAIN LEVELER SEM T1255 TERRAIN LEVELER S U R F A C E E X C A V A T I O N M A C H I N E CUTTING EDGE 2 v e r m e e r. c o m TECHNOLOGY: Vermeer trenchers are the benchmark when it comes to cutting
T1255 TERRAIN LEVELER SEM T1255 TERRAIN LEVELER S U R F A C E E X C A V A T I O N M A C H I N E CUTTING EDGE 2 v e r m e e r. c o m TECHNOLOGY: Vermeer trenchers are the benchmark when it comes to cutting
ELASTIC LOOP MOBILITY SYSTEM : THE CONCEPT AND FUTURE PROSPECTS FOR ROVER MOBILITY ON MARS
 1 ELASTIC LOOP MOBILITY SYSTEM : THE CONCEPT AND FUTURE PROSPECTS FOR ROVER MOBILITY ON MARS Nildeep Patel, Alex Ellery, Chris Welch, Andy Curley, Michael Van Winnendael* Astronautics and Space Systems
1 ELASTIC LOOP MOBILITY SYSTEM : THE CONCEPT AND FUTURE PROSPECTS FOR ROVER MOBILITY ON MARS Nildeep Patel, Alex Ellery, Chris Welch, Andy Curley, Michael Van Winnendael* Astronautics and Space Systems
Japanese Rover Test-bed for Lunar Exploration
 Japanese Rover Test-bed for Lunar Exploration Takashi Kubota*, Yasuharu Kunii**, Yoji Kuroda***, Masatsygu Otsuki* *ISAS/JAXA, 3-1-1, Yoshinodai, Sagamihara 229-8510, JAPAN **Chuo University, 1-13-27,
Japanese Rover Test-bed for Lunar Exploration Takashi Kubota*, Yasuharu Kunii**, Yoji Kuroda***, Masatsygu Otsuki* *ISAS/JAXA, 3-1-1, Yoshinodai, Sagamihara 229-8510, JAPAN **Chuo University, 1-13-27,
Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing
 Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing Therese Griebel NASA Glenn Research Center 1 Overview Current developments in technology that could meet NASA, DOD and commercial
Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing Therese Griebel NASA Glenn Research Center 1 Overview Current developments in technology that could meet NASA, DOD and commercial
Test Facility for Sampler Drills and Distribution Tools
 Aerospace Engineering Department Test Facility for Sampler Drills and Distribution Tools C. Dainese, F. Malnati, A. Ercoli Finzi, G. Sangiovanni The past Small Sample Acquisition and Distribution Tool
Aerospace Engineering Department Test Facility for Sampler Drills and Distribution Tools C. Dainese, F. Malnati, A. Ercoli Finzi, G. Sangiovanni The past Small Sample Acquisition and Distribution Tool
Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability
 Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability 2007 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar
Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability 2007 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar
 Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
Name: Space Exploration PBL
 Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Integrated Simulation Technologies Pvt Ltd
 UHC System Sizing to Eliminate Engine Overheating when Grill and Radiator Fronts are Partially Blocked by Mud & Dirt Integrated Simulation Technologies Pvt Ltd Subir Mandal IST India GT-SUITE Conference
UHC System Sizing to Eliminate Engine Overheating when Grill and Radiator Fronts are Partially Blocked by Mud & Dirt Integrated Simulation Technologies Pvt Ltd Subir Mandal IST India GT-SUITE Conference
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES
 FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
An Innovative Space Rover with Extended Climbing Abilities T. Estier 1, Y. Crausaz 1, B. Merminod 1, M. Lauria 1, R. Piguet 1, R.
 An Innovative Space Rover with Extended Climbing Abilities T. Estier 1, Y. Crausaz 1, B. Merminod 1, M. Lauria 1, R. Piguet 1, R. Siegwart 1 Abstract Autonomous mobile robots have become a key technology
An Innovative Space Rover with Extended Climbing Abilities T. Estier 1, Y. Crausaz 1, B. Merminod 1, M. Lauria 1, R. Piguet 1, R. Siegwart 1 Abstract Autonomous mobile robots have become a key technology
Mars Surface Mobility Proposal
 Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
Results of the Inflatable Robotic Rover Testbed
 Results of the Inflatable Robotic Rover Testbed CMU-RI-TR-03-18 Dimitrios Apostolopoulos, Michael D. Wagner, Stuart Heys and James Teza Robotics Institute Carnegie Mellon University 5000 Forbes Avenue
Results of the Inflatable Robotic Rover Testbed CMU-RI-TR-03-18 Dimitrios Apostolopoulos, Michael D. Wagner, Stuart Heys and James Teza Robotics Institute Carnegie Mellon University 5000 Forbes Avenue
Challenges of Designing the MarsNEXT Network
 Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
ANALYSIS ON MECHANICAL PARAMETERS OF LUNAR ROVER WHEEL
 ANALYSIS ON MECHANICAL PARAMETERS OF LUNAR ROVER WHEEL 1,2 DAWEI JIN, 1 JIANQIAO LI, 3 JIANXIN ZHU, 3 CHUNHUA ZHANG 1 Key laboratary of Bionic Engineering (Ministry of Education), Jilin University, Changchu
ANALYSIS ON MECHANICAL PARAMETERS OF LUNAR ROVER WHEEL 1,2 DAWEI JIN, 1 JIANQIAO LI, 3 JIANXIN ZHU, 3 CHUNHUA ZHANG 1 Key laboratary of Bionic Engineering (Ministry of Education), Jilin University, Changchu
Nomad: A Demonstration of the Transforming Chassis E. Rollins, J. Luntz, B. Shamah, and W. Whittaker Carnegie Mellon University Abstract During the Su
 Nomad: A Demonstration of the Transforming Chassis E. Rollins, J. Luntz, B. Shamah, and W. Whittaker Carnegie Mellon University Abstract During the Summer of 1997 - Nomad - a planetary-relevant mobile
Nomad: A Demonstration of the Transforming Chassis E. Rollins, J. Luntz, B. Shamah, and W. Whittaker Carnegie Mellon University Abstract During the Summer of 1997 - Nomad - a planetary-relevant mobile
A NOVEL IN-FLIGHT SPACE BATTERY HEALTH ASSESSMENT SYSTEM Brandon Buergler (1), François Bausier (1)
, François Bausier (1)") A NOVEL IN-FLIGHT SPACE BATTERY HEALTH ASSESSMENT SYSTEM Brandon Buergler (1), François Bausier (1) (1) ESA-ESTEC, Keplerlaan 1, 2200 AG Noordwijk, NL, Email: brandon.buergler@esa.int, francois.bausier@esa.int
A NOVEL IN-FLIGHT SPACE BATTERY HEALTH ASSESSMENT SYSTEM Brandon Buergler (1), François Bausier (1) (1) ESA-ESTEC, Keplerlaan 1, 2200 AG Noordwijk, NL, Email: brandon.buergler@esa.int, francois.bausier@esa.int
Four-Wheel Rover Performance Analysis at Lunar Analog Test
 Four-Wheel Rover Performance Analysis at Lunar Analog Test Nathan Britton, John Walker, Kazuya Yoshida, Toshiro Shimuzu, Tommaso Paniccia, and Kei Nakata Abstract A high fidelity field test of a four-wheeled
Four-Wheel Rover Performance Analysis at Lunar Analog Test Nathan Britton, John Walker, Kazuya Yoshida, Toshiro Shimuzu, Tommaso Paniccia, and Kei Nakata Abstract A high fidelity field test of a four-wheeled
DYNAMIC LOAD IN OPERATION OF HIGH-SPEED TRACKED VEHICLES
 Journal of KONES Powertrain and Transport, Vol. 16, No. 4 29 DYNAMIC LOAD IN OPERATION OF HIGH-SPEED TRACKED VEHICLES Wac aw Borkowski, Piotr Rybak Military University of Technology S. Kaliskiego Street
Journal of KONES Powertrain and Transport, Vol. 16, No. 4 29 DYNAMIC LOAD IN OPERATION OF HIGH-SPEED TRACKED VEHICLES Wac aw Borkowski, Piotr Rybak Military University of Technology S. Kaliskiego Street
Suitability of reusability for a Lunar re-supply system
 www.dlr.de Chart 1 Suitability of reusability for a Lunar re-supply system Etienne Dumont Space Launcher Systems Analysis (SART) Institut of Space Systems, Bremen, Germany Etienne.dumont@dlr.de IAC 2016
www.dlr.de Chart 1 Suitability of reusability for a Lunar re-supply system Etienne Dumont Space Launcher Systems Analysis (SART) Institut of Space Systems, Bremen, Germany Etienne.dumont@dlr.de IAC 2016
ReachMars 2024 A Candidate Large-Scale Technology Demonstration Mission as a Precursor to Human Mars Exploration
 ReachMars 2024 A Candidate Large-Scale Technology Demonstration Mission as a Precursor to Human Mars Exploration 1 October 2014 Toronto, Canada Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
ReachMars 2024 A Candidate Large-Scale Technology Demonstration Mission as a Precursor to Human Mars Exploration 1 October 2014 Toronto, Canada Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
1 Summary PROPORTIONAL RESPONSE TECHNICAL SUMMARY. Contents
 HABIT WHITE PAPER PROPORTIONAL RESPONSE TECHNICAL SUMMARY Contents 1 Summary 1 2 Suspension for Mountain Bikes 2 3 Proportional Response 10 4 Experimental Validation of Suspension Response 12 5 Size Specific
HABIT WHITE PAPER PROPORTIONAL RESPONSE TECHNICAL SUMMARY Contents 1 Summary 1 2 Suspension for Mountain Bikes 2 3 Proportional Response 10 4 Experimental Validation of Suspension Response 12 5 Size Specific
T1255III TERRAIN LEVELER
 T H E V E R M E E R D E A L E R N E T W O R K : R E L I A B L E S U P P O R T, A L L O V E R T H E W O R L D. Vermeer Asia Pacific Singapore 608586 Phone: +65 6516 9560 Fax: +65 6515 9218 Vermeer Corporation
T H E V E R M E E R D E A L E R N E T W O R K : R E L I A B L E S U P P O R T, A L L O V E R T H E W O R L D. Vermeer Asia Pacific Singapore 608586 Phone: +65 6516 9560 Fax: +65 6515 9218 Vermeer Corporation
Boombot: Low Friction Coefficient Stair Climbing Robot Using Rotating Boom and Weight Redistribution
 Boombot: Low Friction Coefficient Stair Climbing Robot Using Rotating Boom and Weight Redistribution Sartaj Singh and Ramachandra K Abstract Boombot comprising four wheels and a rotating boom in the middle
Boombot: Low Friction Coefficient Stair Climbing Robot Using Rotating Boom and Weight Redistribution Sartaj Singh and Ramachandra K Abstract Boombot comprising four wheels and a rotating boom in the middle
Loads, Structures, and Mechanisms Design Project ENAE 483 Fall 2012
 Loads, Structures, and Mechanisms Design Project Fall 2012 Stephanie Bilyk Leah Krombach Josh Sloane Michelle Sultzman Mission Specifications Design vehicle for lunar exploration mission 10 day mission
Loads, Structures, and Mechanisms Design Project Fall 2012 Stephanie Bilyk Leah Krombach Josh Sloane Michelle Sultzman Mission Specifications Design vehicle for lunar exploration mission 10 day mission
Traction Performance of Wheel and Track for Soft-Soil Traversal
 ICRA 10 Planetary Rovers Workshop May 3rd, 2010 Traction Performance of Wheel and Track for Soft-Soil Traversal Kazuya Yoshida, Keiji Nagatani, Junya Yusa Tohoku University, Japan Traction Performance
ICRA 10 Planetary Rovers Workshop May 3rd, 2010 Traction Performance of Wheel and Track for Soft-Soil Traversal Kazuya Yoshida, Keiji Nagatani, Junya Yusa Tohoku University, Japan Traction Performance
LUNAR INDUSTRIAL RESEARCH BASE. Yuzhnoye SDO proprietary
 LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics: Results and Roadmaps
 National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
UNCLASSIFIED FY 2017 OCO. FY 2017 Base
 Exhibit R-2, RDT&E Budget Item Justification: PB 2017 Air Force Date: February 2016 3600: Research, Development, Test & Evaluation, Air Force / BA 2: Applied Research COST ($ in Millions) Prior Years FY
Exhibit R-2, RDT&E Budget Item Justification: PB 2017 Air Force Date: February 2016 3600: Research, Development, Test & Evaluation, Air Force / BA 2: Applied Research COST ($ in Millions) Prior Years FY
The Mars Express Mission A Continuing Challenge. Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner
 The Mars Express Mission A Continuing Challenge Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner Mars Society, Munich, 13 October, 2012 The Mars Express Mission - a First in
The Mars Express Mission A Continuing Challenge Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner Mars Society, Munich, 13 October, 2012 The Mars Express Mission - a First in
Lunar Science and Infrastructure with the Future Lunar Lander
 ICEUM9 Sorrento Lunar Science and Infrastructure with the Future Lunar Lander Session 9: Next steps for Robotic Landers, Rovers and Outposts ICEUM9 Sorrento, Oct. 26, 2007 Hansjürgen Günther 26/10/2007
ICEUM9 Sorrento Lunar Science and Infrastructure with the Future Lunar Lander Session 9: Next steps for Robotic Landers, Rovers and Outposts ICEUM9 Sorrento, Oct. 26, 2007 Hansjürgen Günther 26/10/2007
MOONBUGGY REPORT. Submitted by Galgotias College of Engineering and Technology Team 1 1, Knowledge Park-2 Greater Noida, Uttar Pradesh INDIA
 MOONBUGGY REPORT Submitted by Galgotias College of Engineering and Technology Team 1 1, Knowledge Park-2 Greater Noida, Uttar Pradesh INDIA TEAM DETAILS Our Moonbuggy design consists of its suspension
MOONBUGGY REPORT Submitted by Galgotias College of Engineering and Technology Team 1 1, Knowledge Park-2 Greater Noida, Uttar Pradesh INDIA TEAM DETAILS Our Moonbuggy design consists of its suspension
Adrestia. A mission for humanity, designed in Delft. Challenge the future
 Adrestia A mission for humanity, designed in Delft 1 Adrestia Vision Statement: To inspire humanity by taking the next step towards setting a footprint on Mars Mission Statement Our goal is to design an
Adrestia A mission for humanity, designed in Delft 1 Adrestia Vision Statement: To inspire humanity by taking the next step towards setting a footprint on Mars Mission Statement Our goal is to design an
Low Power Mobility System for Micro Planetary Rover Micro5
 i-sairas 99, ESTEC, Noordwijk, The Netherlands, June 1-3 1999 Low Power Mobility System for Micro Planetary Rover Micro5 Yoji KURODA*, Koji KONDO*, Kazuaki NAKAMURA*, Yasuharu KUNII**, and Takashi KUBOTA***
i-sairas 99, ESTEC, Noordwijk, The Netherlands, June 1-3 1999 Low Power Mobility System for Micro Planetary Rover Micro5 Yoji KURODA*, Koji KONDO*, Kazuaki NAKAMURA*, Yasuharu KUNII**, and Takashi KUBOTA***
Europa Lander. Mission Concept Update 3/29/2017
 Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
A MOBILITY CONCEPT FOR MARTIAN EXPLORATION Nicholas C. Costes 1, F. ASCE and Stein Sture 2
 (INCOMPLETE--Scanned Text, missing figures) A MOBILITY CONCEPT FOR MARTIAN EXPLORATION Nicholas C. Costes 1, F. ASCE and Stein Sture 2 ABSTRACT Soil mechanics and geological investigations on Mars or the
(INCOMPLETE--Scanned Text, missing figures) A MOBILITY CONCEPT FOR MARTIAN EXPLORATION Nicholas C. Costes 1, F. ASCE and Stein Sture 2 ABSTRACT Soil mechanics and geological investigations on Mars or the
A Grouser Spacing Equation for Determining Appropriate Geometry of Planetary Rover Wheels
 A Grouser Spacing Equation for Determining Appropriate Geometry of Planetary Rover Wheels Krzysztof Skonieczny, Scott J. Moreland, and David S. Wettergreen Abstract Grousers, sometimes called lugs, are
A Grouser Spacing Equation for Determining Appropriate Geometry of Planetary Rover Wheels Krzysztof Skonieczny, Scott J. Moreland, and David S. Wettergreen Abstract Grousers, sometimes called lugs, are
Planetary Surface Transportation and Site Development
 Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
Chapter 4. Vehicle Testing
 Chapter 4 Vehicle Testing The purpose of this chapter is to describe the field testing of the controllable dampers on a Volvo VN heavy truck. The first part of this chapter describes the test vehicle used
Chapter 4 Vehicle Testing The purpose of this chapter is to describe the field testing of the controllable dampers on a Volvo VN heavy truck. The first part of this chapter describes the test vehicle used
Deployment and Flight Test of Inflatable Membrane Aeroshell using Large Scientific Balloon
 1 Deployment and Flight Test of Inflatable Membrane Aeroshell using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori Nagata, Masashi Koyama (The
1 Deployment and Flight Test of Inflatable Membrane Aeroshell using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori Nagata, Masashi Koyama (The
DEVELOPMENT OF AN EUROPEAN EDDY CURRENT DAMPER (ECD-100)
") DEVELOPMENT OF AN EUROPEAN EDDY CURRENT DAMPER (ECD-100) 1 ABSTRACT Authors M. Hofer & M. Humphries Oerlikon Space AG, Schaffhauserstr. 580 CH-8052 Zürich-Seebach Switzerland Oerlikon Space have been designing
DEVELOPMENT OF AN EUROPEAN EDDY CURRENT DAMPER (ECD-100) 1 ABSTRACT Authors M. Hofer & M. Humphries Oerlikon Space AG, Schaffhauserstr. 580 CH-8052 Zürich-Seebach Switzerland Oerlikon Space have been designing
Landing Targets and Technical Subjects for SELENE-2
 Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
SPARTAN. Date: All rights reserved 2011, Thales Alenia Space. Business Unit Space Infrastructures & Transportation
 SPARTAN Date: Business Unit Space Infrastructures & Transportation February the 17 2011 All rights reserved 2011, Thales Alenia Space Project Overview 2 From 3 rd Fp7 Space Call Grant Agreement n. 262837
SPARTAN Date: Business Unit Space Infrastructures & Transportation February the 17 2011 All rights reserved 2011, Thales Alenia Space Project Overview 2 From 3 rd Fp7 Space Call Grant Agreement n. 262837
SESSION 2 Powertrain. Why real driving simulation facilitates the development of new propulsion systems
 SESSION 2 Powertrain Why real driving facilitates the development of new propulsion systems CO 2 /Fuel Consumption, Pollutant Emissions, EV Range The real driving values are more and more in the public
SESSION 2 Powertrain Why real driving facilitates the development of new propulsion systems CO 2 /Fuel Consumption, Pollutant Emissions, EV Range The real driving values are more and more in the public
EXOMARS MSA. TEST HDRM DEVELOPMENT FOR SEPARATION PERFORMANCE VERIFICATION
 EXOMARS MSA. TEST HDRM DEVELOPMENT FOR SEPARATION PERFORMANCE VERIFICATION L. Caldirola (1), B. Schmid (1), M. Cattaneo (1), A. Schiaffini (1) (1) RUAG Schweiz AG, RUAG Space, Schaffhauserstrasse 8, 82
EXOMARS MSA. TEST HDRM DEVELOPMENT FOR SEPARATION PERFORMANCE VERIFICATION L. Caldirola (1), B. Schmid (1), M. Cattaneo (1), A. Schiaffini (1) (1) RUAG Schweiz AG, RUAG Space, Schaffhauserstrasse 8, 82
w. David Carrier, III
 BOARD OF TRUSTEES Brig. Gen. Charles M. Duke, Jr. USAF Ret. Apollo 16 Astronaut Dr. Valery V. Gromov Mobile Vehicle Engineering St. Petersburg, Russia Dr. Grant Heiken University or California Los Alamos
BOARD OF TRUSTEES Brig. Gen. Charles M. Duke, Jr. USAF Ret. Apollo 16 Astronaut Dr. Valery V. Gromov Mobile Vehicle Engineering St. Petersburg, Russia Dr. Grant Heiken University or California Los Alamos
Analysis of Grouser Performance to Develop Guidelines for Design for Planetary Rovers
 Analysis of Grouser Performance to Develop Guidelines for Design for Planetary Rovers Hiroaki Inotsume*, Krzysztof Skonieczny* 1, David S. Wettergreen* *Field Robotics Center, Carnegie Mellon University,
Analysis of Grouser Performance to Develop Guidelines for Design for Planetary Rovers Hiroaki Inotsume*, Krzysztof Skonieczny* 1, David S. Wettergreen* *Field Robotics Center, Carnegie Mellon University,
Description of the Locomotion Control Architecture on the ExoMars Rover Breadboard
 Research Collection Conference Paper Description of the Locomotion Control Architecture on the ExoMars Rover Breadboard Author(s): Hoepflinger, Markus; Krebs, Ambroise; Pradalier, Cedric; Lee, C.; Obstei,
Research Collection Conference Paper Description of the Locomotion Control Architecture on the ExoMars Rover Breadboard Author(s): Hoepflinger, Markus; Krebs, Ambroise; Pradalier, Cedric; Lee, C.; Obstei,
REDUCING THE OCCURRENCES AND IMPACT OF FREIGHT TRAIN DERAILMENTS
 REDUCING THE OCCURRENCES AND IMPACT OF FREIGHT TRAIN DERAILMENTS D-Rail Final Workshop 12 th November - Stockholm Monitoring and supervision concepts and techniques for derailments investigation Antonella
REDUCING THE OCCURRENCES AND IMPACT OF FREIGHT TRAIN DERAILMENTS D-Rail Final Workshop 12 th November - Stockholm Monitoring and supervision concepts and techniques for derailments investigation Antonella
Microbots for Large-Scale Planetary Surface and Subsurface Exploration
 Microbots for Large-Scale Planetary Surface and Subsurface Exploration Steven Dubowsky, Principal Investigator Karl Iagnemma, Co-Investigator Field and Space Robotics Laboratory Massachusetts Institute
Microbots for Large-Scale Planetary Surface and Subsurface Exploration Steven Dubowsky, Principal Investigator Karl Iagnemma, Co-Investigator Field and Space Robotics Laboratory Massachusetts Institute
Mars 2018 Mission Status and Sample Acquisition Issues
 Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
Mobility Assessment of Wheeled Robots Operating on Soft Terrain
 Mobility Assessment of Wheeled Robots Operating on Soft Terrain Bahareh Ghotbi, Francisco González, József Kövecses, and Jorge Angeles Abstract Optimizing the vehicle mobility is an important goal in the
Mobility Assessment of Wheeled Robots Operating on Soft Terrain Bahareh Ghotbi, Francisco González, József Kövecses, and Jorge Angeles Abstract Optimizing the vehicle mobility is an important goal in the
Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon
 , Germany Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori
, Germany Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori
PRELIMINARY DESIGN REVIEW
 PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
RECONNAISSANCE SURVEILLANCE AND TARGETING VEHICLE (RST-V) Mike Byerly Naval Surface Warfare Center
 Mike Byerly Naval Surface Warfare Center") RECONNAISSANCE SURVEILLANCE AND TARGETING VEHICLE (RST-V) Mike Byerly Naval Surface Warfare Center System Concept hhybrid Electric Drive - Improved Fuel Economy - Improved Range - Extended Silent Watch
RECONNAISSANCE SURVEILLANCE AND TARGETING VEHICLE (RST-V) Mike Byerly Naval Surface Warfare Center System Concept hhybrid Electric Drive - Improved Fuel Economy - Improved Range - Extended Silent Watch
STUDY OF AN ARTICULATED BOOM LIFT BY CO- SIMULATION OF BODIES FLEXIBILITY, VEHICLE DYNAMICS AND HYDRAULIC ACTUATION
 Georgia Institute of Technology Marquette University Milwaukee School of Engineering North Carolina A&T State University Purdue University University of California, Merced University of Illinois, Urbana-Champaign
Georgia Institute of Technology Marquette University Milwaukee School of Engineering North Carolina A&T State University Purdue University University of California, Merced University of Illinois, Urbana-Champaign
CHAPTER 4 : RESISTANCE TO PROGRESS OF A VEHICLE - MEASUREMENT METHOD ON THE ROAD - SIMULATION ON A CHASSIS DYNAMOMETER
 CHAPTER 4 : RESISTANCE TO PROGRESS OF A VEHICLE - MEASUREMENT METHOD ON THE ROAD - SIMULATION ON A CHASSIS DYNAMOMETER 1. Scope : This Chapter describes the methods to measure the resistance to the progress
CHAPTER 4 : RESISTANCE TO PROGRESS OF A VEHICLE - MEASUREMENT METHOD ON THE ROAD - SIMULATION ON A CHASSIS DYNAMOMETER 1. Scope : This Chapter describes the methods to measure the resistance to the progress
Development and Testing of the Mars Rover Mobility Platform for Educational and Research Purposes
 Development and Testing of the Mars Rover Mobility Platform for Educational and Research Purposes Luiz Filipe Barbosa 1, Jevgenijs Trunins 2, Yahya H Zweiri 3, Malcolm Claus 4, Niklaus Kamm 5 1, 2, 3 School
Development and Testing of the Mars Rover Mobility Platform for Educational and Research Purposes Luiz Filipe Barbosa 1, Jevgenijs Trunins 2, Yahya H Zweiri 3, Malcolm Claus 4, Niklaus Kamm 5 1, 2, 3 School
AFG Project Update Spring 2006 Semester 02/15/2006
 AFG Project Update Spring 2006 Semester 02/15/2006 Proposal: Unmanned Ground Vehicle Alternative Energy and Sensors Research Under this research program, the recipient will design, build, and test the
AFG Project Update Spring 2006 Semester 02/15/2006 Proposal: Unmanned Ground Vehicle Alternative Energy and Sensors Research Under this research program, the recipient will design, build, and test the
Traveling Performance Evaluation of Planetary Rovers on Loose Soil
 Traveling Performance Evaluation of Planetary Rovers on Loose Soil Masataku Sutoh Department of Aerospace Engineering Tohoku University Aoba 6-6-, Sendai 98-8579, Japan sutoh@astro.mech.tohoku.ac.jp Tsuyoshi
Traveling Performance Evaluation of Planetary Rovers on Loose Soil Masataku Sutoh Department of Aerospace Engineering Tohoku University Aoba 6-6-, Sendai 98-8579, Japan sutoh@astro.mech.tohoku.ac.jp Tsuyoshi
ISO 8379 INTERNATIONAL STANDARD. Rough terrain trucks Stability tests. Chariots élévateurs tous terrains à fourches Essais de stabillité
 INTERNATIONAL STANDARD ISO 8379 First edition 1998-07-01 Rough terrain trucks Stability tests Chariots élévateurs tous terrains à fourches Essais de stabillité A Reference number Provläsningsexemplar /
INTERNATIONAL STANDARD ISO 8379 First edition 1998-07-01 Rough terrain trucks Stability tests Chariots élévateurs tous terrains à fourches Essais de stabillité A Reference number Provläsningsexemplar /