Canadian Lunar & Planetary Rover. Development
|
|
|
- Augustine Charles
- 6 years ago
- Views:
Transcription


1 Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng. Argo/Ontario Drive & Gear Nadeem Ghafoor Canadensys Aerospace Corp. Howard Jones Canadensys Aerospace Corp.



")

2 Ontario Drive & Gear Ltd. ODG Gear Division (transmissions & gears) ARGO Vehicle Division (extreme terrain amphibious vehicles) Space/Robotics Division (lunar/planetary & terrestrial robotic vehicles)




3 ODG Space/Robotics Division Est Concept Generation Design & Analysis Manufacturing & Assembly Deployment & Support




4 Canadensys Aerospace Space systems company based in Toronto, Ontario, Canada Staff drawn from across Canadian space industry landscape with extensive flight heritage from big & small space Focus on Accessible Space Small exploration systems & commercial space Participative science & exploration Canadensys HQ, Toronto ON Optical & RF payloads Enabling technologies for New Exploration Micro / Nano platforms Lunar surface instruments Lunar environment robustness Lunar night survival Thermal & Energy storage Low temperature systems Role on Current Rover Programs Path-to-flight design Thermal design & analysis Lunar environmental qualification Mobility & Lunar Night Survival
 Lunar Rover Night Survival Canadensys (ODG-Argo) Lunar Rover GN&C MDA, NDG Small Lunar Rover Development ODG-Argo (Canadensys, Bombardier Rec.")
5 Lunar Rover Development in Canada Current Projects Midsize Rover Development (TRL-6 Drivetrain) ODG-Argo (Canadensys, Bombardier Rec.) Lunar Rover Night Survival Canadensys (ODG-Argo) Lunar Rover GN&C MDA, NDG Small Lunar Rover Development ODG-Argo (Canadensys, Bombardier Rec.) Soil Hazard Detection Mission Control (ODG-Argo, Canadensys) Lunar Rover Wheel ODG-Argo





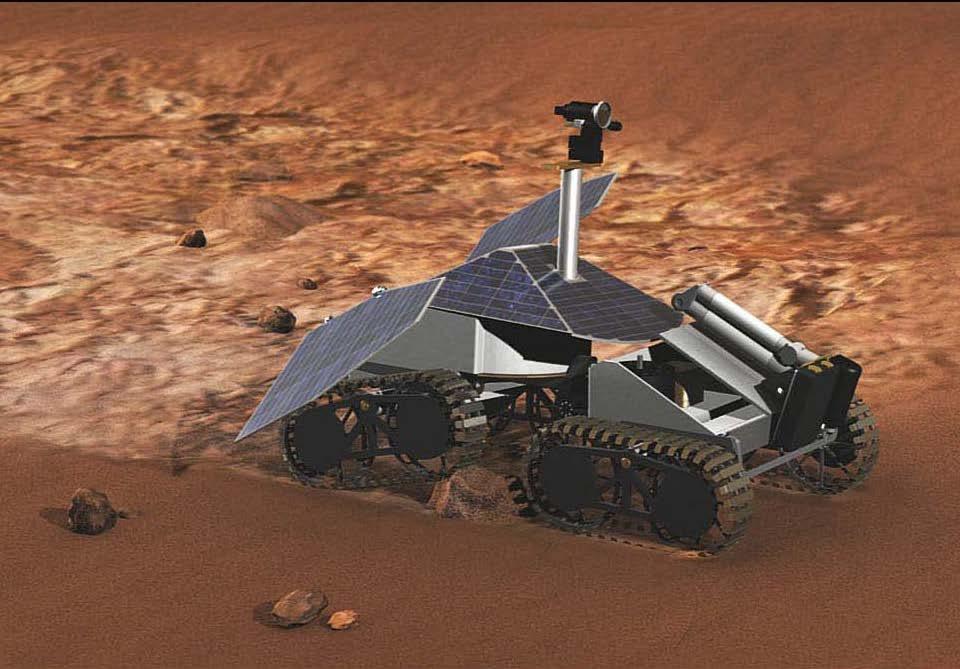
6 Lunar Rover Development at ODG First became involved in lunar rover prototype development for the Canadian Space Agency in 2008 CSA was looking to inject terrestrial off-road vehicle design expertise into lunar rover program Led mobility platform design for six generations of rovers, including prime on two current programs Juno Juno II Artemis Artemis Jr. LRPDP SPRP


7 Rover Traction Systems Two generations of metallic tracks for Canadian Space Agency Five generations of compliant metallic wheels


8 Rover Traction Systems Lab testing in GRC-1 simulant Over 100 km of real world testing in analogue terrain Scalable: ~ cm Traction Coefficient Comparison : Traction Coefficient Vs Slip Rate TIRELESS irings Runamuk - 4psi ARGO 22'' - 4psi ARGO 24'' - 4psi Slip Rate %



9 March 2016 TRL-6 Drivetrain 120 kg platform mass 280 kg launch mass

10

11

12 Apollo Valley Hawaii MMAMA testing - Rover - Wheel - Rough terrain mobility - Power system

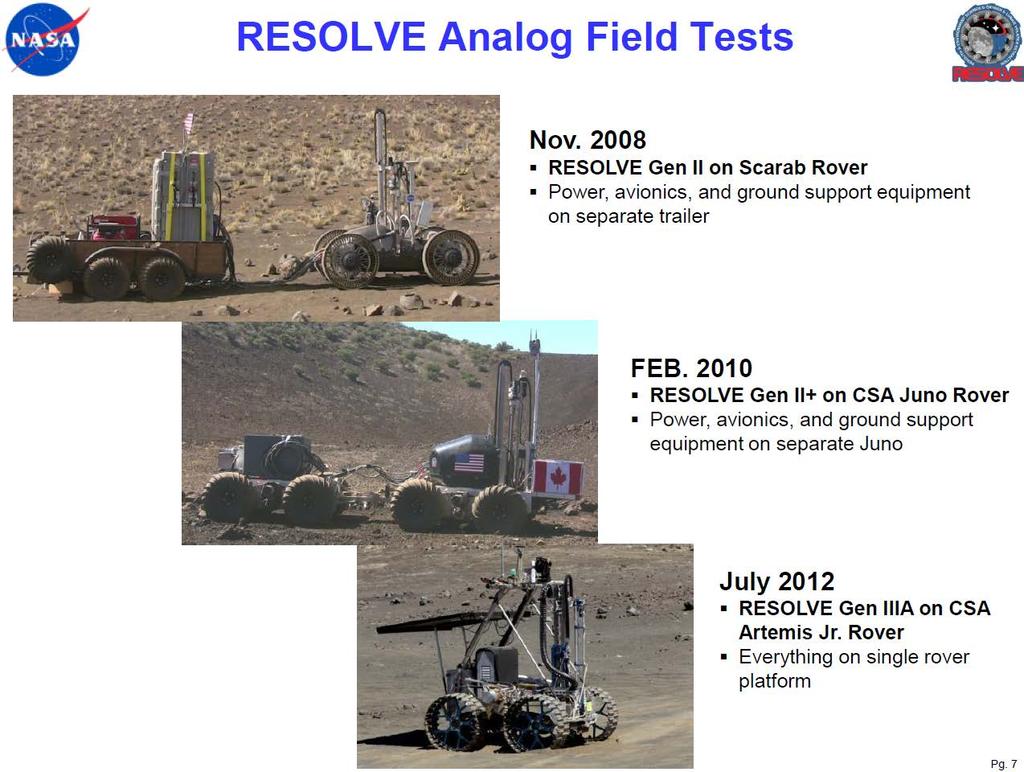
13 Mauna Kea Hawaii RESOLVE test - Wheel - Drive system - Power system - De-landering
 Fewer parts 2 inboard motors with chain drive vs.")


14 ODG Rover Design Philosophy: K.I.S.S. (Keep It Simple, Scientist) Fewer parts 2 inboard motors with chain drive vs. 12 outboard motors Reduced mass Lower cost Skid steering Typical for terrestrial vehicles operating with low ground pressure Reduces envelope of vehicle, allows for bigger wheels Modular Self-contained drive system Accommodates multiple payloads Multiple mission compatibility Highly Mobile High terrainability reduces risk and reliance on navigation Ability to enter PSR s
 at NASA-GRC in Nov.")
15 Current Activity Leading two CSA contracts on development of rover technology Lunar Rover Platform and Drivetrain Prototype (LRPDP) includes drivetrain to be qualified to TRL-6 in dirty TVAC test (simultaneous vacuum, temperature & regolith exposure) at NASA-GRC in Nov Next-Generation Lunar Wheel Development Small Planetary Rover Platform (SPRP) Key technologies for ISECG Roadmap


16 Dimensions LRPDP (aka Lunar Rover Drivetrain Vacuum And Dust Rated) 120 kg base mass 1.6 X 1.6 meters 55 cm wheels Modular payload interface Large, central payload Up to 160 kg High mobility Enables operation in and around PSR s 50 cm/s Obstacles up to 450mm high Rejected acronymical name Canadian Lunar Initiative for Volatile Extraction LRD-VADR


17 Rover Drivetrain Central Motor Thermal and contamination protection Multi-stage non-contact dust seal Minimal drag Minimal wear Eliminates dust ingress into wheel bearing Minimal complexity/mass Reduced number of failure points Optimized for terrainability Slopes Rocks Soft/deep regolith


18 TRL-6 Drivetrain TRL6 Design Lunar Thermal Lunar Dust Environmental Design & Test Radiation; Vacuum Drivetrain unit 1 motor, 2 chains, sprockets, bearings, housing Exposed to vacuum & Chenobi regolith simulant in NASA Glenn VF-13 dirty TVAC chamber Operated over temp range of -70 C to +130 C Exposed to cold survival temp of -180 C Total test time approximately 15 days
 used to distribute simulant over drivetrain")
19 TRL-6 Drivetrain Environmental Testing Test rig for VF13 dirty TVAC test Based filled with Chenobi regolith simulant Conveyor system (external sprockets, chains and scoops) used to distribute simulant over drivetrain unit


20 Test profile Reversing load 25 degree slope equivalent Vehicle speed 0-50 cm/s Start/stop TRL-6 Drivetrain Environmental Testing
 1.2 X 1.")

21 Small Lunar Rover (SPRP Small Planetary Rover Platform) 1.2 X 1.2 meter High mobility TRL-6 compatible drivetrain 90 kg base mass 50 cm compliant wheels Q delivery Scaled technology from LRD-VADR
 Longer endurance total distance travelled > 25 km Longer-duration wear effects of lunar regolith High mobility Take your rover, and put it where the sun don t")
22 Future Work Lunar night survival up to 14 days in shadow (less in polar regions) Long-duration survival of electronics in extreme cold temps (down to -233 C) Longer mission duration (> 14 days) Longer endurance total distance travelled > 25 km Longer-duration wear effects of lunar regolith High mobility Take your rover, and put it where the sun don t shine.
23 Thank You Questions?





24 This is a duplicate slide to ensure that if I click accidentally I don t go to my backup slide without meaning to. Thank You Questions?


25 Rover Commercialization Development of terrestrial rover ARGO J5 Improved dust/thermal protection Multiple battery options Multiple traction options Applications Agricultural Security Military Industrial
An Overview of CSA s s Space Robotics Activities
 An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE
 INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
European Lunar Lander: System Engineering Approach
 human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
Two Related Primary Challenges for Successful Renewed Lunar Exploration
 Two Related Primary Challenges for Successful Renewed Lunar Exploration October 10, 2017 Presented By Ron Creel Retired Apollo Lunar Roving Vehicle Team Member OUTLINE Challenge 1 Coping with Exposure
Two Related Primary Challenges for Successful Renewed Lunar Exploration October 10, 2017 Presented By Ron Creel Retired Apollo Lunar Roving Vehicle Team Member OUTLINE Challenge 1 Coping with Exposure
Lunette: A Global Network of Small Lunar Landers
 Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing
 Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing Therese Griebel NASA Glenn Research Center 1 Overview Current developments in technology that could meet NASA, DOD and commercial
Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing Therese Griebel NASA Glenn Research Center 1 Overview Current developments in technology that could meet NASA, DOD and commercial
The European Lunar Lander Mission
 The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity
 The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, GMT
 Friday, October 30, GMT") Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Lunar Architecture and LRO
 Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
NEXT Exploration Science and Technology Mission. Relevance for Lunar Exploration
 NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
Planetary Surface Transportation and Site Development
 Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
Cygnus Payload Accommodations: Supporting ISS Utilization
 The Space Congress Proceedings 2018 (45th) The Next Great Steps Feb 27th, 1:30 PM Cygnus Payload Accommodations: Supporting ISS Utilization Frank DeMauro Vice President and General Manager, Advanced Programs
The Space Congress Proceedings 2018 (45th) The Next Great Steps Feb 27th, 1:30 PM Cygnus Payload Accommodations: Supporting ISS Utilization Frank DeMauro Vice President and General Manager, Advanced Programs
Suitability of reusability for a Lunar re-supply system
 www.dlr.de Chart 1 Suitability of reusability for a Lunar re-supply system Etienne Dumont Space Launcher Systems Analysis (SART) Institut of Space Systems, Bremen, Germany Etienne.dumont@dlr.de IAC 2016
www.dlr.de Chart 1 Suitability of reusability for a Lunar re-supply system Etienne Dumont Space Launcher Systems Analysis (SART) Institut of Space Systems, Bremen, Germany Etienne.dumont@dlr.de IAC 2016
Landing Targets and Technical Subjects for SELENE-2
 Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Lunar Robotics. Dr. Rob Ambrose, NASA JSC December Dr. Robert O. Ambrose
 Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
PRELIMINARY DESIGN, FABRICATION AND TESTING OF THE FW-350 LUNAR FLEXIBLE WHEEL PROTOTYPE
 PRELIMINARY DESIGN, FABRICATION AND TESTING OF THE FW-350 LUNAR FLEXIBLE WHEEL PROTOTYPE ESA/ESTEC, NOORDWIJK, THE NETHERLANDS / 12 14 APRIL 2011 Mohamad Farhat (1), Erick Dupuis (2), Stephen Lake (3),
PRELIMINARY DESIGN, FABRICATION AND TESTING OF THE FW-350 LUNAR FLEXIBLE WHEEL PROTOTYPE ESA/ESTEC, NOORDWIJK, THE NETHERLANDS / 12 14 APRIL 2011 Mohamad Farhat (1), Erick Dupuis (2), Stephen Lake (3),
Europa Lander. Mission Concept Update 3/29/2017
 Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
VACCO ChEMS Micro Propulsion Systems Advances and Experience in CubeSat Propulsion System Technologies
 VACCO ChEMS Micro Propulsion Systems Advances and Experience in CubeSat Propulsion System Technologies May 1 st, 2018 VACCO Proprietary Data Shall Not Be Disclosed Without Written Permission of VACCO VACCO
VACCO ChEMS Micro Propulsion Systems Advances and Experience in CubeSat Propulsion System Technologies May 1 st, 2018 VACCO Proprietary Data Shall Not Be Disclosed Without Written Permission of VACCO VACCO
Next Steps in Human Exploration: Cislunar Systems and Architectures
 Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES
 FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
Traction Performance of Wheel and Track for Soft-Soil Traversal
 ICRA 10 Planetary Rovers Workshop May 3rd, 2010 Traction Performance of Wheel and Track for Soft-Soil Traversal Kazuya Yoshida, Keiji Nagatani, Junya Yusa Tohoku University, Japan Traction Performance
ICRA 10 Planetary Rovers Workshop May 3rd, 2010 Traction Performance of Wheel and Track for Soft-Soil Traversal Kazuya Yoshida, Keiji Nagatani, Junya Yusa Tohoku University, Japan Traction Performance
ABI Cooler System Protoflight Performance
 ABI Cooler System Protoflight Performance R. Colbert, G. Pruitt, T. Nguyen, J. Raab Northrop Grumman Space Technology Redondo Beach, CA, USA 90278 S. Clark, P. Ramsey ITT Industries Space Systems Division
ABI Cooler System Protoflight Performance R. Colbert, G. Pruitt, T. Nguyen, J. Raab Northrop Grumman Space Technology Redondo Beach, CA, USA 90278 S. Clark, P. Ramsey ITT Industries Space Systems Division
Qualification of Lockheed Martin Micro Pulse Tube Cryocooler to TRL6
 #29 42 1 Qualification of Lockheed Martin Micro Pulse Tube Cryocooler to TRL6 T. C. Nast, E. Roth, J. R. Olson, P. Champagne, D. Frank Lockheed Martin Space Technology and Research (STAR) Lab, Palo Alto,
#29 42 1 Qualification of Lockheed Martin Micro Pulse Tube Cryocooler to TRL6 T. C. Nast, E. Roth, J. R. Olson, P. Champagne, D. Frank Lockheed Martin Space Technology and Research (STAR) Lab, Palo Alto,
Analysis of Power Storage Media for the Exploration of the Moon
 Analysis of Power Storage Media for the Exploration of the Moon Michael Loweth, Rachel Buckle ICEUM 9 22-26 th October 2007 ABSL Space Products 2005 2007 Servicing USA and the ROW UNITED KINGDOM Culham
Analysis of Power Storage Media for the Exploration of the Moon Michael Loweth, Rachel Buckle ICEUM 9 22-26 th October 2007 ABSL Space Products 2005 2007 Servicing USA and the ROW UNITED KINGDOM Culham
Cryocooler with Cold Compressor for Deep Space Applications
 36 1 Cryocooler with Cold Compressor for Deep Space Applications T.C. Nast 1, B.P.M. Helvensteijn 2, E. Roth 2, J.R. Olson 1, P. Champagne 1, J. R. Maddocks 2 1 Lockheed Martin Space Technology and Research
36 1 Cryocooler with Cold Compressor for Deep Space Applications T.C. Nast 1, B.P.M. Helvensteijn 2, E. Roth 2, J.R. Olson 1, P. Champagne 1, J. R. Maddocks 2 1 Lockheed Martin Space Technology and Research
Space Robotics Planetary Exploration - a DLR Perspective
 Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
RIMRES: A project summary
 RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability
 Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability 2007 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar
Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability 2007 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar
DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN
 Ready 12th Symposium on Advance Space Technologies in Robotics and Automation, ESA / ESTEC, Noordwijk, The Nethelands DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN Shivesh Kumar, Raghavendra
Ready 12th Symposium on Advance Space Technologies in Robotics and Automation, ESA / ESTEC, Noordwijk, The Nethelands DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN Shivesh Kumar, Raghavendra
NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration
 National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
PRELIMINARY DESIGN REVIEW
 PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
Some Thoughts on Simulations in Terramechanics
 Some Thoughts on Simulations in Terramechanics J.Y. Wong Professor Emeritus and Distinguished Research Professor Carleton University and Vehicle Systems Development Corporation Ottawa, Canada Copyright
Some Thoughts on Simulations in Terramechanics J.Y. Wong Professor Emeritus and Distinguished Research Professor Carleton University and Vehicle Systems Development Corporation Ottawa, Canada Copyright
Lunar Science and Infrastructure with the Future Lunar Lander
 ICEUM9 Sorrento Lunar Science and Infrastructure with the Future Lunar Lander Session 9: Next steps for Robotic Landers, Rovers and Outposts ICEUM9 Sorrento, Oct. 26, 2007 Hansjürgen Günther 26/10/2007
ICEUM9 Sorrento Lunar Science and Infrastructure with the Future Lunar Lander Session 9: Next steps for Robotic Landers, Rovers and Outposts ICEUM9 Sorrento, Oct. 26, 2007 Hansjürgen Günther 26/10/2007
From MARS To MOON. V. Giorgio Director of Italian Programs. Sorrento, October, All rights reserved, 2007, Thales Alenia Space
 From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems
 www.dlr.de\rm Chart 1 > ASTRA 2013 - Pan/Tilt-Unit as a Perception Module 16.05.2013 Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems DLR-RMC Robotic and Mechatronic
www.dlr.de\rm Chart 1 > ASTRA 2013 - Pan/Tilt-Unit as a Perception Module 16.05.2013 Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems DLR-RMC Robotic and Mechatronic
Human Exploration of the Lunar Surface
 International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce
 Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce Dr. Allison Zuniga, Mark Turner and Dr. Dan Rasky NASA Ames Research Center Space Portal Office Mike
Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce Dr. Allison Zuniga, Mark Turner and Dr. Dan Rasky NASA Ames Research Center Space Portal Office Mike
The Common Spacecraft Bus and Lunar Commercialization
 The Common Spacecraft Bus and Lunar Commercialization Alex MacDonald NASA Ames Research Center alex.macdonald@balliol.ox.ac.uk Will Marshall NASA Ames Research Center william.s.marshall@nasa.gov Summary
The Common Spacecraft Bus and Lunar Commercialization Alex MacDonald NASA Ames Research Center alex.macdonald@balliol.ox.ac.uk Will Marshall NASA Ames Research Center william.s.marshall@nasa.gov Summary
Formation Flying Experiments on the Orion-Emerald Mission. Introduction
 Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science
 Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Field Experiments in Mobility and Navigation with a Lunar Rover Prototype
 Field Experiments in Mobility and Navigation with a Lunar Rover Prototype David Wettergreen 1, Dominic Jonak, David Kohanbash, Scott Moreland, Spencer Spiker, and James Teza Abstract Scarab is a prototype
Field Experiments in Mobility and Navigation with a Lunar Rover Prototype David Wettergreen 1, Dominic Jonak, David Kohanbash, Scott Moreland, Spencer Spiker, and James Teza Abstract Scarab is a prototype
Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics: Results and Roadmaps
 National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return
 Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012
 Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE
 LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE ABSTRACT With 1 rover, 2 astronauts and 3 days, the Apollo 17 Mission covered over 30 km, setup
LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE ABSTRACT With 1 rover, 2 astronauts and 3 days, the Apollo 17 Mission covered over 30 km, setup
Jay Gundlach AIAA EDUCATION SERIES. Manassas, Virginia. Joseph A. Schetz, Editor-in-Chief. Blacksburg, Virginia. Aurora Flight Sciences
 Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
NanoRacks External Payload Platform
 NanoRacks External Payload Platform Introduction NanoRacks has developed a hosted payload service, NanoRacks External Payload Platform (NREP) NREP will be installed on the JEM EF Hosted payloads will utilize
NanoRacks External Payload Platform Introduction NanoRacks has developed a hosted payload service, NanoRacks External Payload Platform (NREP) NREP will be installed on the JEM EF Hosted payloads will utilize
Future NASA Power Technologies for Space and Aero Propulsion Applications. Presented to. Workshop on Reforming Electrical Energy Systems Curriculum
 Future NASA Power Technologies for Space and Aero Propulsion Applications Presented to Workshop on Reforming Electrical Energy Systems Curriculum James F. Soeder Senior Technologist for Power NASA Glenn
Future NASA Power Technologies for Space and Aero Propulsion Applications Presented to Workshop on Reforming Electrical Energy Systems Curriculum James F. Soeder Senior Technologist for Power NASA Glenn
Light-Lift Rocket II
 Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Name: Space Exploration PBL
 Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Exploration Architecture Update
 Exploration Architecture Update Doug Cooke Deputy Associate Administrator Exploration Systems Mission Directorate John Connolly Vehicle Engineering and Integration Lunar Lander Project Office March 14,
Exploration Architecture Update Doug Cooke Deputy Associate Administrator Exploration Systems Mission Directorate John Connolly Vehicle Engineering and Integration Lunar Lander Project Office March 14,
Abstract #1756. English. French. Author(s) and Co Author(s) ispace & Team Hakuto s 2017 Lunar Mission
 and Co Author(s) ispace & Team Hakuto s 2017 Lunar Mission") 4/25/2017 CIM TPMS Abstract #1756 English ispace & Team Hakuto s 2017 Lunar Mission This presentation will introduce ispace, a lunar exploration company headquartered in Tokyo, Japan, and Team Hakuto,
4/25/2017 CIM TPMS Abstract #1756 English ispace & Team Hakuto s 2017 Lunar Mission This presentation will introduce ispace, a lunar exploration company headquartered in Tokyo, Japan, and Team Hakuto,
Innovative Mars exploration rover using inflatable or unfolding wheels
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
OMOTENASHI. (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor)
") SLS EM-1 secondary payload OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) The smallest moon lander launched by the most powerful rocket in the world * Omotenashi
SLS EM-1 secondary payload OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) The smallest moon lander launched by the most powerful rocket in the world * Omotenashi
MIRI Cooler System Design Update
 1 MIRI Cooler System Design Update M. Petach, D. Durand, M. Michaelian, J. Raab, and E. Tward Northrop Grumman Aerospace Systems Redondo Beach, CA 90278 ABSTRACT The Mid InfraRed Instrument (MIRI) for
1 MIRI Cooler System Design Update M. Petach, D. Durand, M. Michaelian, J. Raab, and E. Tward Northrop Grumman Aerospace Systems Redondo Beach, CA 90278 ABSTRACT The Mid InfraRed Instrument (MIRI) for
On Orbit Refueling: Supporting a Robust Cislunar Space Economy
 On Orbit Refueling: Supporting a Robust Cislunar Space Economy Courtesy of NASA 3 April 2017 Copyright 2014 United Launch Alliance, LLC. All Rights Reserved. Atlas V Launch History ULA s Vision: Unleashing
On Orbit Refueling: Supporting a Robust Cislunar Space Economy Courtesy of NASA 3 April 2017 Copyright 2014 United Launch Alliance, LLC. All Rights Reserved. Atlas V Launch History ULA s Vision: Unleashing
The Advanced Instrumentation and Technology Centre (AITC)
") The Advanced Instrumentation and Technology Centre (AITC) ACSER CUBESAT2017: Launching CubeSats for and from Australia 19 th -20 th April 2017 QB50 Test Campaign and CubeSat testing at the AITC Mike Petkovic
The Advanced Instrumentation and Technology Centre (AITC) ACSER CUBESAT2017: Launching CubeSats for and from Australia 19 th -20 th April 2017 QB50 Test Campaign and CubeSat testing at the AITC Mike Petkovic
Resource Prospector Traverse Planning
 Resource Prospector Traverse Planning Jennifer Heldmann (NASA Ames / NASA Headquarters) Anthony Colaprete (NASA Ames Research Center) Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters)
Resource Prospector Traverse Planning Jennifer Heldmann (NASA Ames / NASA Headquarters) Anthony Colaprete (NASA Ames Research Center) Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters)
WHAT WE WILL DISCUSS IN THIS VIDEO
 WHAT WE WILL DISCUSS IN THIS VIDEO What is Chandrayaan 2 all about? Why is it special? Have we entered the The Asian space race? Where do China, Japan and India stand? What is the importance of the moon?
WHAT WE WILL DISCUSS IN THIS VIDEO What is Chandrayaan 2 all about? Why is it special? Have we entered the The Asian space race? Where do China, Japan and India stand? What is the importance of the moon?
NASA s Choice to Resupply the Space Station
 RELIABILITY SpaceX is based on the philosophy that through simplicity, reliability and low-cost can go hand-in-hand. By eliminating the traditional layers of management internally, and sub-contractors
RELIABILITY SpaceX is based on the philosophy that through simplicity, reliability and low-cost can go hand-in-hand. By eliminating the traditional layers of management internally, and sub-contractors
Ironless Core DC Motors for Aerospace
 Ironless Core DC Motors for Aerospace Market segments covered by AS/EN9100 Support equipment Space shuttle & re entry vehicles Aviation Commercial passenger aircraft Light aircraft Cabin equipment Science
Ironless Core DC Motors for Aerospace Market segments covered by AS/EN9100 Support equipment Space shuttle & re entry vehicles Aviation Commercial passenger aircraft Light aircraft Cabin equipment Science
QinetiQ Electric Propulsion
 QinetiQ Electric Propulsion Gridded Ion Thruster developments Kevin Hall EPIC Madrid, Spain 24 th & 25 th October, 2017 QinetiQ Introduction QinetiQ employs over 6,000 experts in the fields of defence,
QinetiQ Electric Propulsion Gridded Ion Thruster developments Kevin Hall EPIC Madrid, Spain 24 th & 25 th October, 2017 QinetiQ Introduction QinetiQ employs over 6,000 experts in the fields of defence,
In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led
 was founded by current company President Alexander Zakharov, since then he has led") A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
Rover - Remote Operated Vehicle for Extraction and Reconnaissance
 IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 9, Issue 4 (Nov. - Dec. 2013), PP 38-42 Rover - Remote Operated Vehicle for Extraction and Reconnaissance
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 9, Issue 4 (Nov. - Dec. 2013), PP 38-42 Rover - Remote Operated Vehicle for Extraction and Reconnaissance
Lunar Escape: Development of Astronaut Recovery Rover Program
 Lunar Escape: Development of Astronaut Recovery Rover Program Nicholas Wade-Mayhue, Dan Janke, Kyle Kilgore, Mohammed Alzohay, Samad Qureshi Colorado School of Mines Advisor: Dr. Knecht nwademay@mines.edu
Lunar Escape: Development of Astronaut Recovery Rover Program Nicholas Wade-Mayhue, Dan Janke, Kyle Kilgore, Mohammed Alzohay, Samad Qureshi Colorado School of Mines Advisor: Dr. Knecht nwademay@mines.edu
July 28, ULA Rideshare Capabilities
 July 28, 2011 ULA Rideshare Capabilities Jake Szatkowski Business Development & Advanced Programs Copyright 2011 United Launch Alliance, LLC. All Rights Reserved. Rideshare Missions ULA's family of ependable
July 28, 2011 ULA Rideshare Capabilities Jake Szatkowski Business Development & Advanced Programs Copyright 2011 United Launch Alliance, LLC. All Rights Reserved. Rideshare Missions ULA's family of ependable
Mars Surface Mobility Proposal
 Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
Mars 2018 Mission Status and Sample Acquisition Issues
 Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
Performance Evaluation of Wheeled Rover by Analysis and Test
 Performance Evaluation of Wheeled Rover by Analysis and Test Gaurav Sharma, Srividhya G., Shamrao, K. Balaji, G. Nagesh, C.D. Sridhara Abstract Rovers provide a mobile platform for exploring planetary
Performance Evaluation of Wheeled Rover by Analysis and Test Gaurav Sharma, Srividhya G., Shamrao, K. Balaji, G. Nagesh, C.D. Sridhara Abstract Rovers provide a mobile platform for exploring planetary
Mega Engineering vehicles. the next generation of advanced apc
 Mega Engineering vehicles the next generation of advanced apc Raptor Mega armored military vehicles is division of Mega Engineering Vehicles INC. Raptor the latest design by MEGA, the most advanced American
Mega Engineering vehicles the next generation of advanced apc Raptor Mega armored military vehicles is division of Mega Engineering Vehicles INC. Raptor the latest design by MEGA, the most advanced American
Advanced Cooling Technologies, Inc. Low-Cost Radiator for Fission Power Thermal Control NETS Conference
 Advanced Cooling Technologies, Inc. Low-Cost Radiator for Fission Power Thermal Control 2015 NETS Conference Advanced Cooling Technologies, Inc. Taylor Maxwell Calin Tarau Bill Anderson Vanguard Space
Advanced Cooling Technologies, Inc. Low-Cost Radiator for Fission Power Thermal Control 2015 NETS Conference Advanced Cooling Technologies, Inc. Taylor Maxwell Calin Tarau Bill Anderson Vanguard Space
Lunar Missions by Year - All Countries. Mission count dropped as we transitioned from politically driven missions to science driven missions
 n Lunar Missions by Year - All Countries Key: All Mission Attempts Mission Successes Mission count dropped as we transitioned from politically driven missions to science driven missions Capability Driven
n Lunar Missions by Year - All Countries Key: All Mission Attempts Mission Successes Mission count dropped as we transitioned from politically driven missions to science driven missions Capability Driven
Challenges of Designing the MarsNEXT Network
 Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Venus Entry Options Venus Upper Atmosphere Investigations Science and Technical Interchange Meeting (STIM)
") Venus Entry Options Venus Upper Atmosphere Investigations Science and Technical Interchange Meeting (STIM) January 24, 2013 at the Ohio Aerospace Institute Peter Gage, Gary Allen, Dinesh Prabhu, Ethiraj
Venus Entry Options Venus Upper Atmosphere Investigations Science and Technical Interchange Meeting (STIM) January 24, 2013 at the Ohio Aerospace Institute Peter Gage, Gary Allen, Dinesh Prabhu, Ethiraj
lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow
 lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow John Connolly Lunar Lander Project Office 1 Components of Program Constellation Earth Departure Stage Ares V - Heavy
lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow John Connolly Lunar Lander Project Office 1 Components of Program Constellation Earth Departure Stage Ares V - Heavy
A New Facility for Lander Touchdown and Rover Mobility Testing at DLR
 A New Facility for Lander Touchdown and Rover Mobility Testing at DLR Lutz Richter, Antje Brucks, Lars Witte DLR Institute of Space Systems, Bremen, Germany New DLR Institute of Space Systems Systems Analysis
A New Facility for Lander Touchdown and Rover Mobility Testing at DLR Lutz Richter, Antje Brucks, Lars Witte DLR Institute of Space Systems, Bremen, Germany New DLR Institute of Space Systems Systems Analysis
The Mobility System Wheel Design for NASA s Mars Science Laboratory Mission
 The Mobility System Wheel Design for NASA s Mars Science Laboratory Mission S. Haggart; J. Waydo Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA, USA 1. Abstract / Introduction
The Mobility System Wheel Design for NASA s Mars Science Laboratory Mission S. Haggart; J. Waydo Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA, USA 1. Abstract / Introduction
NASA - USLI Presentation 1/23/2013. University of Minnesota: USLI CDR 1
 NASA - USLI Presentation 1/23/2013 2013 USLI CDR 1 Final design Key features Final motor choice Flight profile Stability Mass Drift Parachute Kinetic Energy Staged recovery Payload Integration Interface
NASA - USLI Presentation 1/23/2013 2013 USLI CDR 1 Final design Key features Final motor choice Flight profile Stability Mass Drift Parachute Kinetic Energy Staged recovery Payload Integration Interface
HYDROS Development of a CubeSat Water Electrolysis Propulsion System
 HYDROS Development of a CubeSat Water Electrolysis Propulsion System Vince Ethier, Lenny Paritsky, Todd Moser, Jeffrey Slostad, Robert Hoyt Tethers Unlimited, Inc 11711 N. Creek Pkwy S., Suite D113, Bothell,
HYDROS Development of a CubeSat Water Electrolysis Propulsion System Vince Ethier, Lenny Paritsky, Todd Moser, Jeffrey Slostad, Robert Hoyt Tethers Unlimited, Inc 11711 N. Creek Pkwy S., Suite D113, Bothell,
Chassis Concepts for the ExoMars Rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
Hydrogen Station Equipment Performance Device (HyStEP Device) Specification
 Specification") Hydrogen Station Equipment Performance Device (HyStEP Device) Specification Overview Policies and technology solutions need to be developed and implemented to help reduce the time from when a new hydrogen
Hydrogen Station Equipment Performance Device (HyStEP Device) Specification Overview Policies and technology solutions need to be developed and implemented to help reduce the time from when a new hydrogen
Development of the Descent Brake Mechanism for the Mars Science Laboratory
 Development of the Descent Brake Mechanism for the Mars Science Laboratory David Dowen *, Jeff Moser** and Jeff Mobley** Abstract This paper will describe the design and testing of an electromechanical
Development of the Descent Brake Mechanism for the Mars Science Laboratory David Dowen *, Jeff Moser** and Jeff Mobley** Abstract This paper will describe the design and testing of an electromechanical
Long-Range Rovers for Mars Exploration and Sample Return
 2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
Modular Reconfigurable Spacecraft Small Rocket/Spacecraft Technology Platform SMART
 Modular Reconfigurable Spacecraft Small Rocket/Spacecraft Technology Platform SMART Micro-Spacecraft Prototype Demonstrates Modular Open Systems Architecture for Fast Life-Cycle Missions Jaime Esper *,
Modular Reconfigurable Spacecraft Small Rocket/Spacecraft Technology Platform SMART Micro-Spacecraft Prototype Demonstrates Modular Open Systems Architecture for Fast Life-Cycle Missions Jaime Esper *,
A First Principles-based Li-Ion Battery Performance and Life Prediction Model Based on Single Particle Model Equations
 A First Principles-based Li-Ion Battery Performance and Life Prediction Model Based on Single Particle Model Equations NASA Battery Workshop Huntsville, Alabama November 17-19, 19, 2009 by Gerald Halpert
A First Principles-based Li-Ion Battery Performance and Life Prediction Model Based on Single Particle Model Equations NASA Battery Workshop Huntsville, Alabama November 17-19, 19, 2009 by Gerald Halpert
Aeroquip Sure-Mate Couplings
 Aeroquip Sure-Mate Couplings Positive locking fingers Blunt start ACME threads for easy connection Lighter weight compared to previous thread-together couplings Low pressure drop across the connector Minimal
Aeroquip Sure-Mate Couplings Positive locking fingers Blunt start ACME threads for easy connection Lighter weight compared to previous thread-together couplings Low pressure drop across the connector Minimal
Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection
 Journal of Asian Electric Vehicles, Volume 7, Number 2, December 2009 Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection Koiro
Journal of Asian Electric Vehicles, Volume 7, Number 2, December 2009 Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection Koiro
Future NASA Multi-kilowatt Free Piston Stirling Applications
 Future NASA Multi-kilowatt Free Piston Stirling Applications Henry W. Brandhorst, Jr. Space Research Institute, Auburn University, Auburn University, AL 36849-5320 This paper describes the preliminary
Future NASA Multi-kilowatt Free Piston Stirling Applications Henry W. Brandhorst, Jr. Space Research Institute, Auburn University, Auburn University, AL 36849-5320 This paper describes the preliminary
AMBR* Engine for Science Missions
 AMBR* Engine for Science Missions NASA In Space Propulsion Technology (ISPT) Program *Advanced Material Bipropellant Rocket (AMBR) April 2010 AMBR Status Information Outline Overview Objectives Benefits
AMBR* Engine for Science Missions NASA In Space Propulsion Technology (ISPT) Program *Advanced Material Bipropellant Rocket (AMBR) April 2010 AMBR Status Information Outline Overview Objectives Benefits
Development of a Low Cost Suborbital Rocket for Small Satellite Testing and In-Space Experiments
 Development of a Low Cost Suborbital Rocket for Small Satellite Testing and In-Space Experiments Würzburg, 2015-09-15 (extended presentation) Dr.-Ing. Peter H. Weuta Dipl.-Ing. Neil Jaschinski WEPA-Technologies
Development of a Low Cost Suborbital Rocket for Small Satellite Testing and In-Space Experiments Würzburg, 2015-09-15 (extended presentation) Dr.-Ing. Peter H. Weuta Dipl.-Ing. Neil Jaschinski WEPA-Technologies
Europa Lander Mission Overview and Update
 Europa Lander Mission Overview and Update Steve Sell 15 th International Planetary Probe Workshop, Boulder CO June 2018 2018 California Institute of Technology. Government sponsorship acknowledged. Predecisional
Europa Lander Mission Overview and Update Steve Sell 15 th International Planetary Probe Workshop, Boulder CO June 2018 2018 California Institute of Technology. Government sponsorship acknowledged. Predecisional
Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon
 , Germany Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori
, Germany Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori
UNDERWATER SOLUTIONS WORLDWIDE
 UNDERWATER SOLUTIONS WORLDWIDE Payload Autonomy on the Phoenix International Artemis AUV MOOS-DAWG 2015 July 22-23 Peter McKibbin IRAD/Special Projects Manager pmckibbin@phnx-international.com Brief Company
UNDERWATER SOLUTIONS WORLDWIDE Payload Autonomy on the Phoenix International Artemis AUV MOOS-DAWG 2015 July 22-23 Peter McKibbin IRAD/Special Projects Manager pmckibbin@phnx-international.com Brief Company
2012 Cubesat Workshop. ULA Rideshare Update APR 19, 2012
 2012 Cubesat Workshop ULA Rideshare Update APR 19, 2012 Jake Szatkowski gerard.p.szatkowski@ulalaunch.com Major Travis Willco will brief status of the NRO L-36 Mission On Friday Copyright 2011 United Launch
2012 Cubesat Workshop ULA Rideshare Update APR 19, 2012 Jake Szatkowski gerard.p.szatkowski@ulalaunch.com Major Travis Willco will brief status of the NRO L-36 Mission On Friday Copyright 2011 United Launch
Component and System Level Modeling of a Two-Phase Cryogenic Propulsion System for Aerospace Applications
 Component and System Level Modeling of a Two-Phase Cryogenic Propulsion System for Aerospace Applications J. LoRusso, B. Kalina, M. Van Benschoten, Roush Industries GT Users Conference November 9, 2015
Component and System Level Modeling of a Two-Phase Cryogenic Propulsion System for Aerospace Applications J. LoRusso, B. Kalina, M. Van Benschoten, Roush Industries GT Users Conference November 9, 2015
Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers
 Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers Kojiro Iizuka and Takashi Kubota 2 International Young Researchers Empowerment Center, Shinshu University, iizuka@shinshu-u.ac.jp 2
Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers Kojiro Iizuka and Takashi Kubota 2 International Young Researchers Empowerment Center, Shinshu University, iizuka@shinshu-u.ac.jp 2
AFG Project Update Spring 2006 Semester 02/15/2006
 AFG Project Update Spring 2006 Semester 02/15/2006 Proposal: Unmanned Ground Vehicle Alternative Energy and Sensors Research Under this research program, the recipient will design, build, and test the
AFG Project Update Spring 2006 Semester 02/15/2006 Proposal: Unmanned Ground Vehicle Alternative Energy and Sensors Research Under this research program, the recipient will design, build, and test the
Analysts/Fund Managers Visit 19 April Autonomous Systems and Future Capability Mark Kane
 Analysts/Fund Managers Visit 19 April 2007 Autonomous Systems and Future Capability Mark Kane The Rationale for UAVs The Rationale for UAVs UAVs generally seen to carry out the dull, dirty, and dangerous
Analysts/Fund Managers Visit 19 April 2007 Autonomous Systems and Future Capability Mark Kane The Rationale for UAVs The Rationale for UAVs UAVs generally seen to carry out the dull, dirty, and dangerous