RIMRES: A project summary
|
|
|
- Roxanne Weaver
- 5 years ago
- Views:
Transcription



1 RIMRES: A project summary at ICRA Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße Bremen 1

2 Acknowledgements RIMRES has been sponsored by the Space Agency of the German Aerospace Center with federal funds of the Federal Ministry of Economics and Technology in accordance with the parliamentary resolution of the German Parliament. Project partner: Contributors: 2
3 Outline System Overview System Composition Rover: Sherpa Electro-Mechanical-Interface and Payload-Items Scout: CREX Software Framework Lessons learnt & Summary Ongoing and Future Developments 3
4 System Overview and Mission Scenario 4




5 Overview RIMRES addresses several aspects of a robotic lunar surface mission: Robotic surface mobility: Combination of various locomotion principles Cooperation of heterogeneous robots Reconfigurability on different system levels Modularity Autonomy Multi-robot system, consisting of Wheeled Rover with active suspension system and manipulator arm Six-Legged scout robot Different types of so called Payload-Items Can be stacked to form payloads Can be used to extend the capabilities of the mobile units Demonstration in an artificial crater environment in DFKI laboratories 5



 Deploy scientific")





6 Aspired Mission Scenario Lunar Polar Crater Exploration Search for volatile substances in permanently shaded regions Landing in regions with high illumination Transport of scout system to crater rim (wheeled rover) Deploy scientific instruments and/or simple communication infrastructure elements (modular payload-items) Deployment of scout at site of application Exploration of shaded regions by highly mobile scout system Example at lunar south pole: Illumination and hight map of Shakelton crater. Picture taken from on_pages/lro/news/crate r-ice.html 6

7 System composition 7
8 Rover: Sherpa 8


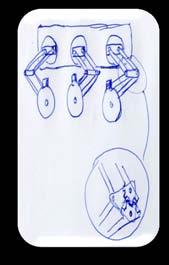


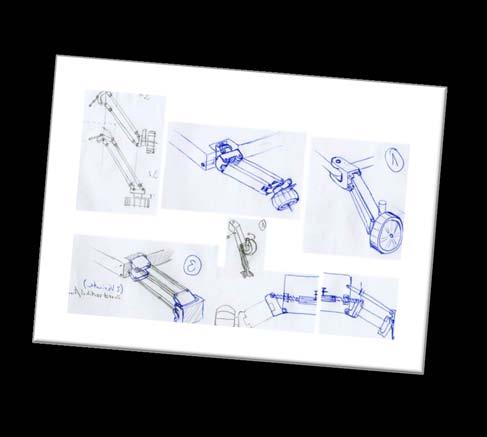
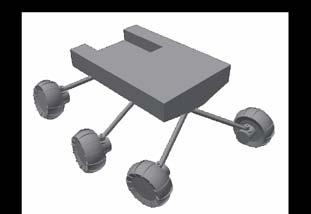




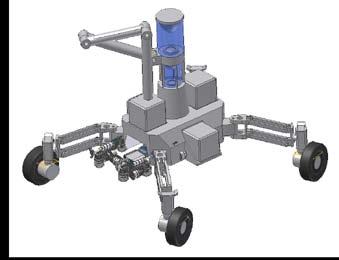



9 Rover concepts From draft to 9



10 to final design and implementation 10
11 Key characteristics Description Max. ground clearance Min. ground clearance (wheels above body) Square-shaped footprint in cross stance Mass (w/o scout or payload-items, incl. manipulator) Mass of manipulator Length of fully stretched arm Max. static load on stretched arm (stretched wrist) Max. static load on stretched arm (hanging wrist) Value 711 mm 189 mm 2100 mm (high stance) to 2500 mm (body low) approx. 160 kg 25 kg 1955 mm 183 N 537 N 11

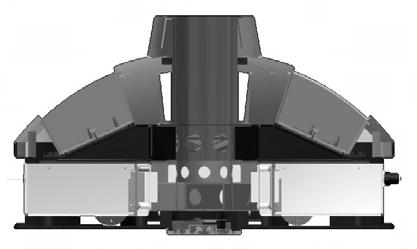


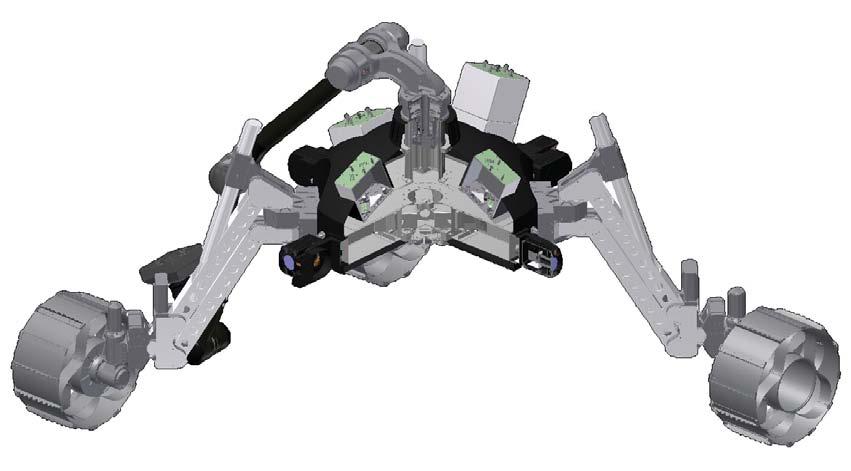

12 Modularity of construction Mechanical Construction legged-wheels EMI receptors compartments for electronics manipulator adapter wheel steering unit camera housing Support of operation locomotion platform manipulator 12

 Locomotion")

13 Manipulator General manipulation 6 DOF Interface as partial P/L-Item Stacking 6-DOF FT-Sensor Payload dynamic 25kg, static 45kg DOF 5 with vertical orientation 60kg Lifting from and deploying to body 100kg (reduced workspace) Locomotion support 5 th leg System-Inspection using interface camera DOF 5 DOF 3 DOF 6 F/T-Sensor DOF 4 Manipulator- Interface DOF 2 DOF 1 13
14 Manipulator for locomotion (1) Video: Sherpa uses manipulator as support to lift two legs 14
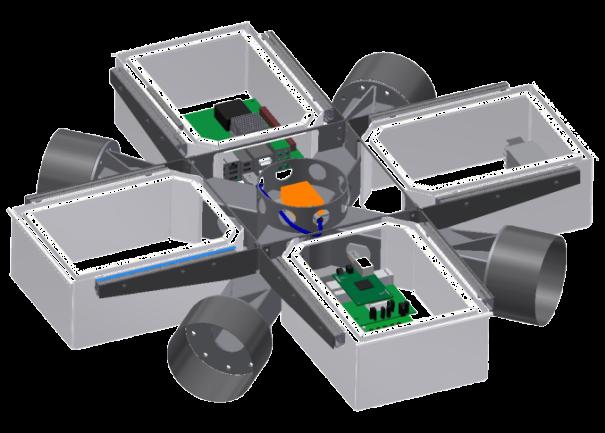
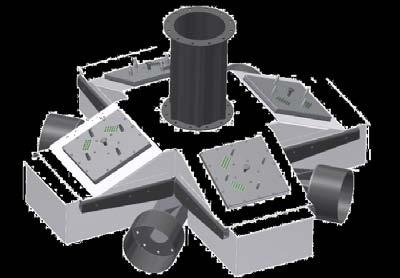
15 EMI and Payload-Items 15

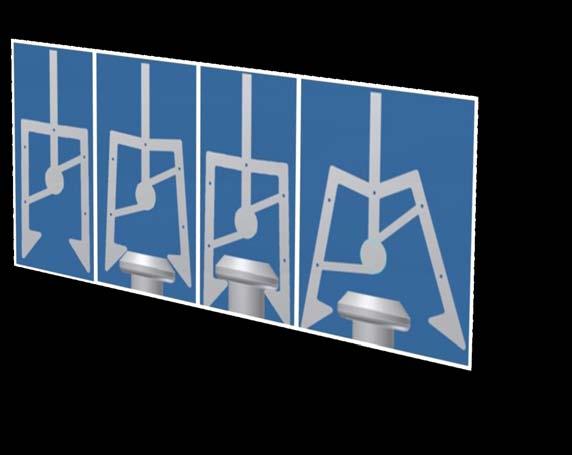
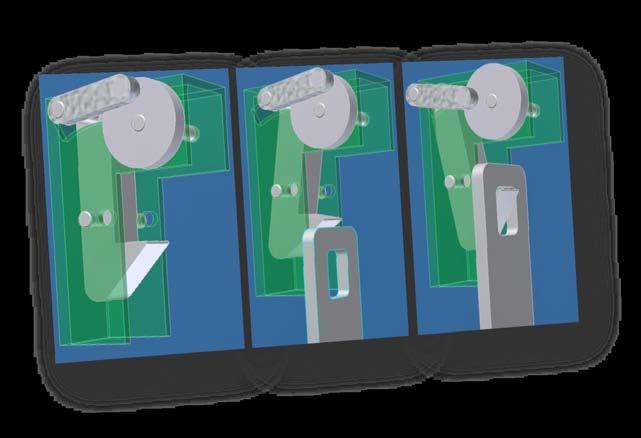

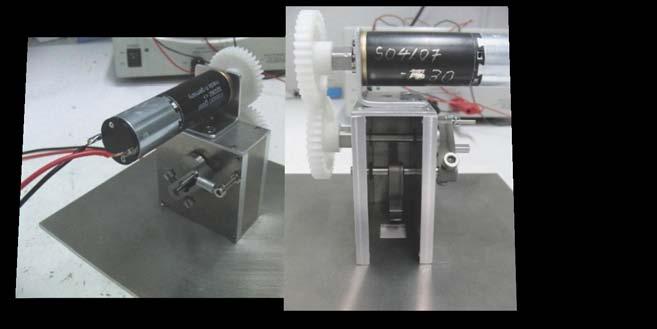


16 EMI Iterations: Mechanical 16
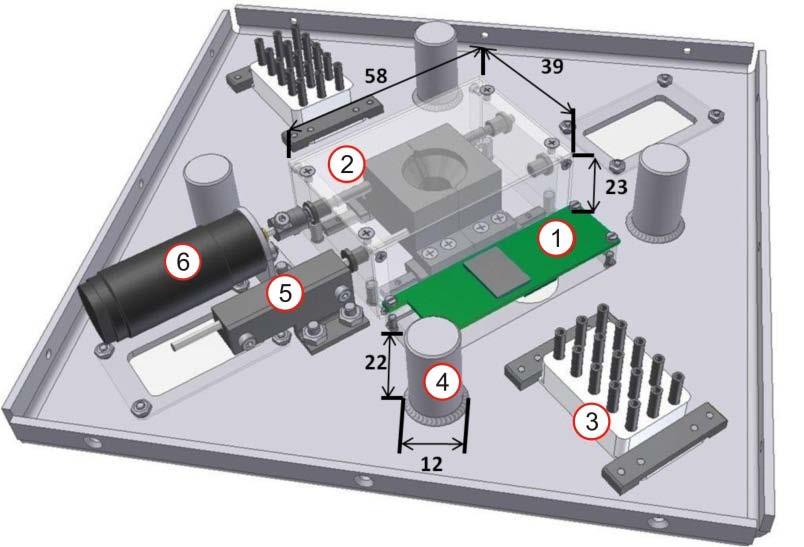
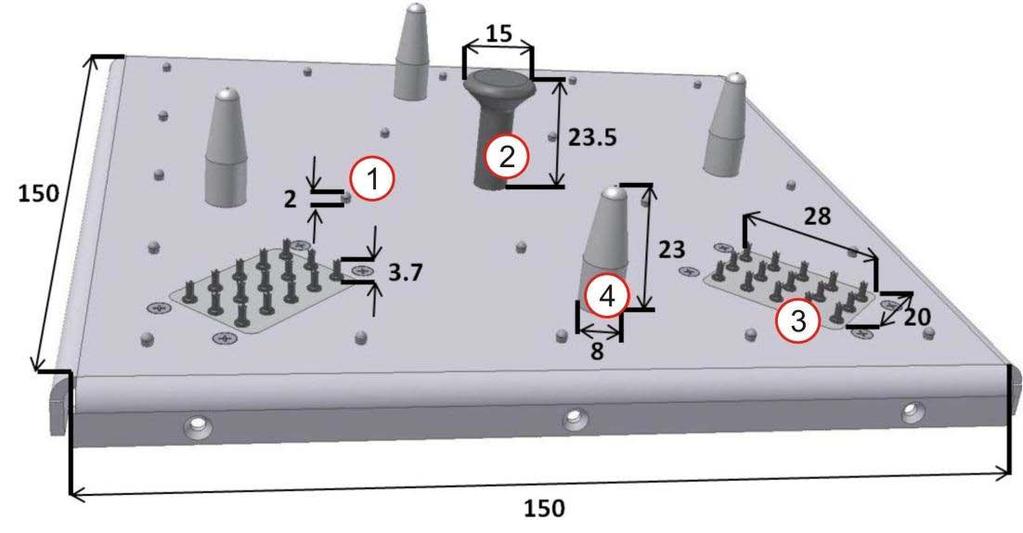
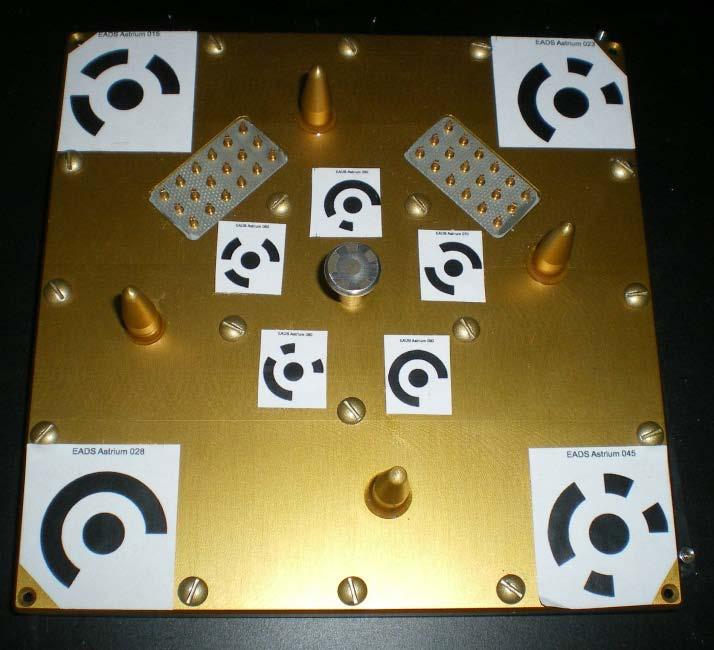
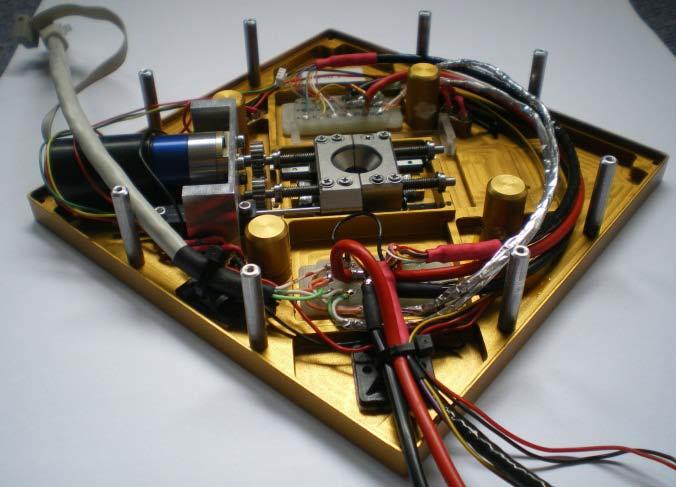



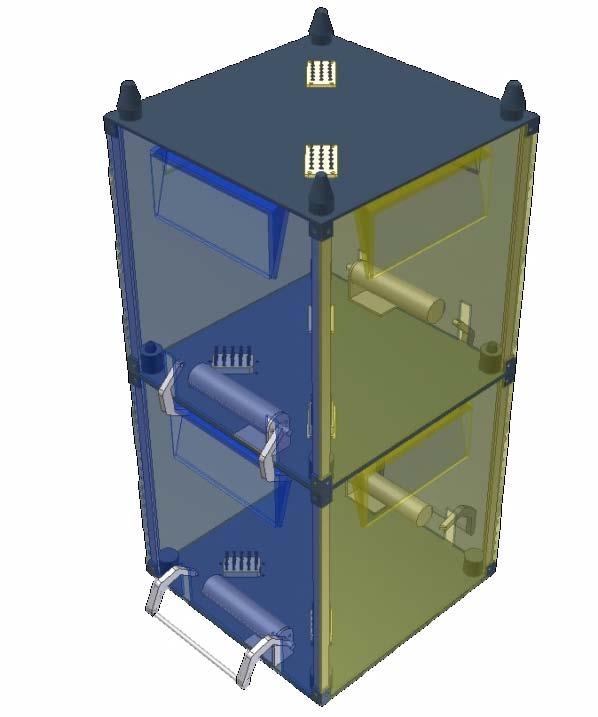
17 Final mechanical design EMI Bottom EMI Top EMI 17


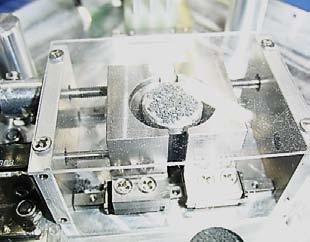
18 EMI Experiments Simulation of lunar dust accumulation, to measure effects on EMI functionality Mechanical locking CREX with a weight of 27 kg Function can be maintain up to 40 kg in 30 deg, 60 kg in 0 deg Power transfer across pair of pins up 200W constant transfer current implementation splits transfer across two pairs of pins 18




")
19 Payload-Items Battery module houses a single 48V/2,4Ah battery pack allows for a second battery pack simulation of a energy storage, e.g. as part of a setup for solar energy harvesting Camera module Placeholder for data producing module (science module) Commendable and generating significant data volume, handled by high-level software framework 19
20 Manipulator for stacking Video: Sherpa uses manipulator for stacking 20
21 Scout: CREX 21

 Weight: approx 27kg 27 DOF in total Power consumption ca.")
22 CREX: Crater Explorer Six-legged scout for the RIMRES-system Provides high locomotion capabilities in difficult terrains such as steep crater environments Legs can be reconfigured as grippers or sensing devices Passive EMI on back Connection to rover Payload bay for equipping with additional functionalities Sensors Extra energy packs Sensor head with laser range finder and monocular camera System specifications 820x1000x220mm (standard posture) Weight: approx 27kg 27 DOF in total Power consumption ca. 85W standing/ 105W walking 22
23 CREX and manipulator Video: CREX is lifted from high level to ground level 23
24 System reconfiguration via docking 24
25 Docking Participating systems Sherpa EMI CREX 25
26 Docking - Subsystems PC Gumstix PC Suzaku- Board 26


27 Docking - Subsystems Marker detection Control command ACTION SET_POSTURE EXEC x yaw Response SUCCESS NO_SUCCESS Camera LEDs PC Suzaku- Board 27
28 Docking - Subsystems EMI Connection Camera PC Suzaku- Board 28
29 Communication dialog-based commanding MTA CORE supervision Control command ACTION SET_POSTURE EXEC x 0.01 yaw bottom_emi_ cam Response SUCCESS NO_SUCCESS MTA CORE Monster supervision Conversation Identifier ID: 1: _12:00:00-VisualServoing Protocol: RIMRES 29
30 System inspection in monolithic state Video: System inspection in monolithic state 30
31 Lessons learnt & Summary 31
32 Lessons learnt Hardware Seemingly small devices such as the EMI can be as complex as big systems and draw many resources Things that can break will break (including COTS) account for accessibility of all(!) systems (ideally), e.g. for changing electronics, checking fuses, wireless communication, Complexity of locomotion platform questionable, DOF not fully exploited Software Invest early in setting up of a proper, smooth workflow for all(!) involved system platforms Try generalized approach first, specialize late when deploying to individual systems Make all features and functions directly accessible for mission operation Integration requires hardware and software, finishing hardware late means less integration and testing time for software (if the deadline is on a fix date) maintain a component database, i.e. track hardware and installed builds 32
33 Summary Unique mechatronic system comprising a hybrid rover, sixlegged scout, and payload-items a further step towards developing heterogeneous, modular and reconfigurable systems capable of complex activities Development of a software framework to control the heterogeneous, modular robotic system model-based development, supporting modularity also at the software layer embedding EMI as central device for realizing reconfigurability Many lessons learned regarding system design and handling system heterogeneity at software level 33
34 Future and ongoing development at DFKI IMPERA April 2011 March 2014 Integrated Mission Planning for Distributed Robot Systems Multi-robot exploration strategies for space application Applicable approaches for a system like RIMRES A cooperation between DFKI Bremen and University of Kassel TransTerrA May 2013 February 2014 Semi-autonomous exploration of planetary surfaces to establish a logistic chain Explicit consideration of transferring technology to terrestrial applications Building on top of technology of RIMRES 34

35 Remarks, questions, 35
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science
 Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints
 Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints Lan Yue Ji, Sebatian Bartsch, Frank Kirchner DFKI Bremen & Universität Bremen Robotics Innovations Center Director:
Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints Lan Yue Ji, Sebatian Bartsch, Frank Kirchner DFKI Bremen & Universität Bremen Robotics Innovations Center Director:
An Overview of CSA s s Space Robotics Activities
 An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
Space Robotics Planetary Exploration - a DLR Perspective
 Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
The European Lunar Lander Mission
 The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
Lunar Architecture and LRO
 Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
European Lunar Lander: System Engineering Approach
 human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES
 FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
NEXT Exploration Science and Technology Mission. Relevance for Lunar Exploration
 NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
Mobile Payload Element (MPE)
") Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
RB-Mel-03. SCITOS G5 Mobile Platform Complete Package
 RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
From MARS To MOON. V. Giorgio Director of Italian Programs. Sorrento, October, All rights reserved, 2007, Thales Alenia Space
 From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
Robots to Support a Human Mars Mission
 Robots to Support a Human Mars Mission 1 W. Naumann, P. Hofmann, A. v. Richter Kayser-Threde GmbH Wolfratshauser Str. 48, D-81379 München email: andreas.von.richter@kayser-threde.com 7th Workshop ASTRA
Robots to Support a Human Mars Mission 1 W. Naumann, P. Hofmann, A. v. Richter Kayser-Threde GmbH Wolfratshauser Str. 48, D-81379 München email: andreas.von.richter@kayser-threde.com 7th Workshop ASTRA
 Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
MiR Hook. Technical Documentation
 MiR Hook Technical Documentation Version 1.7 Software release 1.7 Release date: 10.11.2016 Table of contents 1 Introduction...3 2 The MiR Hook hardware...3 3 Trolley specifications...4 4 Space requirements...5
MiR Hook Technical Documentation Version 1.7 Software release 1.7 Release date: 10.11.2016 Table of contents 1 Introduction...3 2 The MiR Hook hardware...3 3 Trolley specifications...4 4 Space requirements...5
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE
 INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
COYOTE III: DEVELOPMENT OF A MODULAR AND HIGHLY MOBILE MICRO ROVER
 COYOTE III: DEVELOPMENT OF A MODULAR AND HIGHLY MOBILE MICRO ROVER Roland U. Sonsalla 1, Joel Bessekon Akpo 1, and Frank Kirchner 1,2 1 DFKI Robotics Innovation Center, Robert-Hooke-Str. 1, 28359 Bremen,
COYOTE III: DEVELOPMENT OF A MODULAR AND HIGHLY MOBILE MICRO ROVER Roland U. Sonsalla 1, Joel Bessekon Akpo 1, and Frank Kirchner 1,2 1 DFKI Robotics Innovation Center, Robert-Hooke-Str. 1, 28359 Bremen,
Tank-Automotive Research, Development, and Engineering Center
 Tank-Automotive Research, Development, and Engineering Center Technologies for the Objective Force Mr. Dennis Wend Executive Director for the National Automotive Center Tank-automotive & Armaments COMmand
Tank-Automotive Research, Development, and Engineering Center Technologies for the Objective Force Mr. Dennis Wend Executive Director for the National Automotive Center Tank-automotive & Armaments COMmand
Avalanche Tower LS12-5
 Avalanche Tower LS12-5 Set up and function The Wyssen avalanche tower is designed to trigger avalanches prophylactically with remote-controlled blasting. To trigger an avalanche, a coded command is sent
Avalanche Tower LS12-5 Set up and function The Wyssen avalanche tower is designed to trigger avalanches prophylactically with remote-controlled blasting. To trigger an avalanche, a coded command is sent
Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics: Results and Roadmaps
 National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
DESIGN DEVELOPMENT ENGINEERING TECHNOLOGY INDUSTRIALIZATION
 COMPANY INTRODUCTION DESIGN DEVELOPMENT ENGINEERING TECHNOLOGY INDUSTRIALIZATION Lukas Stary February 7, 2017 LUSTACO Group www.lustaco.com February 7, 2017 1 OUTLINE BASIC DESCRIPTION STYLING & DESIGN
COMPANY INTRODUCTION DESIGN DEVELOPMENT ENGINEERING TECHNOLOGY INDUSTRIALIZATION Lukas Stary February 7, 2017 LUSTACO Group www.lustaco.com February 7, 2017 1 OUTLINE BASIC DESCRIPTION STYLING & DESIGN
Lunette: A Global Network of Small Lunar Landers
 Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Green Mobility Technology Roadmap
 Green Mobility Technology Roadmap Prof. Dr.-Ing. Horst E. Friedrich Institute of Vehicle Concepts German Aerospace Center (DLR) SCCER-Mobility 1st Annual Conference at ETH Zürich 11 th September 2014 www.dlr.de
Green Mobility Technology Roadmap Prof. Dr.-Ing. Horst E. Friedrich Institute of Vehicle Concepts German Aerospace Center (DLR) SCCER-Mobility 1st Annual Conference at ETH Zürich 11 th September 2014 www.dlr.de
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, GMT
 Friday, October 30, GMT") Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Lunar Science and Infrastructure with the Future Lunar Lander
 ICEUM9 Sorrento Lunar Science and Infrastructure with the Future Lunar Lander Session 9: Next steps for Robotic Landers, Rovers and Outposts ICEUM9 Sorrento, Oct. 26, 2007 Hansjürgen Günther 26/10/2007
ICEUM9 Sorrento Lunar Science and Infrastructure with the Future Lunar Lander Session 9: Next steps for Robotic Landers, Rovers and Outposts ICEUM9 Sorrento, Oct. 26, 2007 Hansjürgen Günther 26/10/2007
IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017
 IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017 AUTOMATED DRIVING OPENS NEW OPPORTUNITIES FOR CUSTOMERS AND COMMUNITY. MORE SAFETY MORE COMFORT MORE FLEXIBILITY MORE
IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017 AUTOMATED DRIVING OPENS NEW OPPORTUNITIES FOR CUSTOMERS AND COMMUNITY. MORE SAFETY MORE COMFORT MORE FLEXIBILITY MORE
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Planetary Surface Transportation and Site Development
 Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
Industrial-and-Research Lunar Base
 Industrial-and-Research Lunar Base STRATEGY OF LUNAR BASE CREATION Phase 1 Preparatory: creation of international cooperation, investigation of the Moon by unmanned spacecraft, creation of space transport
Industrial-and-Research Lunar Base STRATEGY OF LUNAR BASE CREATION Phase 1 Preparatory: creation of international cooperation, investigation of the Moon by unmanned spacecraft, creation of space transport
A First Principles-based Li-Ion Battery Performance and Life Prediction Model Based on Single Particle Model Equations
 A First Principles-based Li-Ion Battery Performance and Life Prediction Model Based on Single Particle Model Equations NASA Battery Workshop Huntsville, Alabama November 17-19, 19, 2009 by Gerald Halpert
A First Principles-based Li-Ion Battery Performance and Life Prediction Model Based on Single Particle Model Equations NASA Battery Workshop Huntsville, Alabama November 17-19, 19, 2009 by Gerald Halpert
OLEV AN ON-ORBIT SERVICING PROGRAM FOR COMMERCIAL SPACECRAFTS IN GEO
 Von der Erde ins All. Und zurück. Intelligente Lösungen für Industrie und Wissenschaft. From Earth to Space. And back. Intelligent solutions for industry and science. E a r t h S p a c e & F u t u r e
Von der Erde ins All. Und zurück. Intelligente Lösungen für Industrie und Wissenschaft. From Earth to Space. And back. Intelligent solutions for industry and science. E a r t h S p a c e & F u t u r e
China Intelligent Connected Vehicle Technology Roadmap 1
 China Intelligent Connected Vehicle Technology Roadmap 1 Source: 1. China Automotive Engineering Institute, , Oct. 2016 1 Technology Roadmap 1 General
China Intelligent Connected Vehicle Technology Roadmap 1 Source: 1. China Automotive Engineering Institute, , Oct. 2016 1 Technology Roadmap 1 General
The Role of the Infrastructure Investments in the New EU Road Mobility Package
 45 46 TH ASECAP STUDY STUDY & INFORMATION & INFORMATION DAYS DAYS 2017 The Role of the Infrastructure Investments in the New EU Road Mobility Package Grand Hotel Union, Ljubljana, Slovenia 6-8 June 2018
45 46 TH ASECAP STUDY STUDY & INFORMATION & INFORMATION DAYS DAYS 2017 The Role of the Infrastructure Investments in the New EU Road Mobility Package Grand Hotel Union, Ljubljana, Slovenia 6-8 June 2018
Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business. Real-time Mechanism and System Simulation To Support Flight Simulators
 Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business Real-time Mechanism and System Simulation To Support Flight Simulators Smarter decisions, better products. Contents Introduction
Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business Real-time Mechanism and System Simulation To Support Flight Simulators Smarter decisions, better products. Contents Introduction
PRELIMINARY DESIGN REVIEW
 PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
ASTRIUM. Lunar Lander Concept for LIFE. Hansjürgen Günther TOB 11. Bremen, 23/
 Lunar Lander Concept for LIFE Hansjürgen Günther TOB 11 Bremen, 23/24.11.2006 This document is the property of EADS SPACE. It shall not be communicated to third parties without prior written agreement.its
Lunar Lander Concept for LIFE Hansjürgen Günther TOB 11 Bremen, 23/24.11.2006 This document is the property of EADS SPACE. It shall not be communicated to third parties without prior written agreement.its
Canadian Lunar & Planetary Rover. Development
 Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN
 Ready 12th Symposium on Advance Space Technologies in Robotics and Automation, ESA / ESTEC, Noordwijk, The Nethelands DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN Shivesh Kumar, Raghavendra
Ready 12th Symposium on Advance Space Technologies in Robotics and Automation, ESA / ESTEC, Noordwijk, The Nethelands DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN Shivesh Kumar, Raghavendra
Palamede, more than a microsatellite. Workshop on University Micro Satellites in Italy Rome, July 27, 2005
 Palamede, more than a microsatellite The Palamede Team (represented by Franco Bernelli and Roberto Armellin) Workshop on University Micro Satellites in Italy Rome, July 27, 2005 Outline Mission and educational
Palamede, more than a microsatellite The Palamede Team (represented by Franco Bernelli and Roberto Armellin) Workshop on University Micro Satellites in Italy Rome, July 27, 2005 Outline Mission and educational
UNDERWATER SOLUTIONS WORLDWIDE
 UNDERWATER SOLUTIONS WORLDWIDE Payload Autonomy on the Phoenix International Artemis AUV MOOS-DAWG 2015 July 22-23 Peter McKibbin IRAD/Special Projects Manager pmckibbin@phnx-international.com Brief Company
UNDERWATER SOLUTIONS WORLDWIDE Payload Autonomy on the Phoenix International Artemis AUV MOOS-DAWG 2015 July 22-23 Peter McKibbin IRAD/Special Projects Manager pmckibbin@phnx-international.com Brief Company
Results of the Airbus DS led e.deorbit Phase B1 ESA study. Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, October 2017
 Results of the Airbus DS led e.deorbit Phase B1 ESA study Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, 24-26 October 2017 2 e.deorbit Mission Final rendezvous and capture phase Phase B1 Team
Results of the Airbus DS led e.deorbit Phase B1 ESA study Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, 24-26 October 2017 2 e.deorbit Mission Final rendezvous and capture phase Phase B1 Team
MASCOT Asteroid Lander with innovative Mobility Mechanism
 www.dlr.de Slide 1 MASCOT Asteroid Lander with innovative Mobility Mechanism Dr. Josef Reill German Aerospace Center - DLR Institute of Robotics and Mechatronics Team-Members: Josef Reill Hans-Jürgen Sedlmayr
www.dlr.de Slide 1 MASCOT Asteroid Lander with innovative Mobility Mechanism Dr. Josef Reill German Aerospace Center - DLR Institute of Robotics and Mechatronics Team-Members: Josef Reill Hans-Jürgen Sedlmayr
Resource Prospector Traverse Planning
 Resource Prospector Traverse Planning Jennifer Heldmann (NASA Ames / NASA Headquarters) Anthony Colaprete (NASA Ames Research Center) Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters)
Resource Prospector Traverse Planning Jennifer Heldmann (NASA Ames / NASA Headquarters) Anthony Colaprete (NASA Ames Research Center) Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters)
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012
 Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
On the role of AI in autonomous driving: prospects and challenges
 On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
Offshore Application of the Flywheel Energy Storage. Final report
 Page of Offshore Application of the Flywheel Energy Storage Page 2 of TABLE OF CONTENTS. Executive summary... 2 2. Objective... 3 3. Background... 3 4. Project overview:... 4 4. The challenge... 4 4.2
Page of Offshore Application of the Flywheel Energy Storage Page 2 of TABLE OF CONTENTS. Executive summary... 2 2. Objective... 3 3. Background... 3 4. Project overview:... 4 4. The challenge... 4 4.2
Our Approach to Automated Driving System Safety. February 2019
 Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
Shaping the future of the TWV Fleet
 U.S. ARMY TANK AUTOMOTIVE RESEARCH, DEVELOPMENT AND ENGINEERING CENTER Shaping the future of the TWV Fleet Dr. Paul Rogers Director, TARDEC, Distribution A Who is TARDEC? MISSION: Develop, integrate and
U.S. ARMY TANK AUTOMOTIVE RESEARCH, DEVELOPMENT AND ENGINEERING CENTER Shaping the future of the TWV Fleet Dr. Paul Rogers Director, TARDEC, Distribution A Who is TARDEC? MISSION: Develop, integrate and
INCREASING ENERGY EFFICIENCY BY MODEL BASED DESIGN
 INCREASING ENERGY EFFICIENCY BY MODEL BASED DESIGN GREGORY PINTE THE MATHWORKS CONFERENCE 2015 EINDHOVEN 23/06/2015 FLANDERS MAKE Strategic Research Center for the manufacturing industry Integrating the
INCREASING ENERGY EFFICIENCY BY MODEL BASED DESIGN GREGORY PINTE THE MATHWORKS CONFERENCE 2015 EINDHOVEN 23/06/2015 FLANDERS MAKE Strategic Research Center for the manufacturing industry Integrating the
Autonomous Power Supply Uninterruptible Power Supply (UPS)
") 1.2 kw Fuel Cell Training System for System Design and Hybridization Autonomous Power Supply Uninterruptible Power Supply (UPS) Hands-on Instruction for Fuel Cell Technology The is a comprehensive tool
1.2 kw Fuel Cell Training System for System Design and Hybridization Autonomous Power Supply Uninterruptible Power Supply (UPS) Hands-on Instruction for Fuel Cell Technology The is a comprehensive tool
Lunar Robotics. Dr. Rob Ambrose, NASA JSC December Dr. Robert O. Ambrose
 Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
Podium Engineering complete race cars, vehicle prototypes high performance hybrid/electric powertrain
 Born in the firm belief that design quality, high project commitment and absolute respect of deadlines are key competitive factors for a consulting and engineering company, Podium Engineering is a dynamic
Born in the firm belief that design quality, high project commitment and absolute respect of deadlines are key competitive factors for a consulting and engineering company, Podium Engineering is a dynamic
EUROBOT EVA-assistant robot for ISS
 In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 EUROBOT EVA-assistant robot for
In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 EUROBOT EVA-assistant robot for
Adult Sized Humanoid Robot: Archie
 Adult Sized Humanoid Robot: Archie Jacky Baltes 1, Chi Tai Cheng 1, M.C. Lau 1, Ahmad Byagowi 2, Peter Kopacek 2, and John Anderson 1 1 Autonomous Agent Lab University of Manitoba Winnipeg, Manitoba Canada,
Adult Sized Humanoid Robot: Archie Jacky Baltes 1, Chi Tai Cheng 1, M.C. Lau 1, Ahmad Byagowi 2, Peter Kopacek 2, and John Anderson 1 1 Autonomous Agent Lab University of Manitoba Winnipeg, Manitoba Canada,
Robotic Motor Solutions
 Robotic Motor Solutions K O L L M O R G E N R O B O T I C S O L U T I O N S Rely on Kollmorgen Solutions We focus on motion so you don t have to. Our reputation for enabling robotic innovation continues
Robotic Motor Solutions K O L L M O R G E N R O B O T I C S O L U T I O N S Rely on Kollmorgen Solutions We focus on motion so you don t have to. Our reputation for enabling robotic innovation continues
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
Gavin Hannah - HND Electronic Engineering Graded Unit Solutions. Christian Hammond, City of Glasgow College. John Woods, City of Glasgow College
 Project Name: SARRRO (Search & Rescue Reconnaissance Rover) Customer: Supervisor: Engineer: Christian Hammond, City of Glasgow College John Woods, City of Glasgow College Gavin Hannah Project Solutions
Project Name: SARRRO (Search & Rescue Reconnaissance Rover) Customer: Supervisor: Engineer: Christian Hammond, City of Glasgow College John Woods, City of Glasgow College Gavin Hannah Project Solutions
Jay Gundlach AIAA EDUCATION SERIES. Manassas, Virginia. Joseph A. Schetz, Editor-in-Chief. Blacksburg, Virginia. Aurora Flight Sciences
 Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce
 Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce Dr. Allison Zuniga, Mark Turner and Dr. Dan Rasky NASA Ames Research Center Space Portal Office Mike
Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce Dr. Allison Zuniga, Mark Turner and Dr. Dan Rasky NASA Ames Research Center Space Portal Office Mike
Prototyping Collision Avoidance for suas
 Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
INTRODUCTION Team Composition Electrical System
 IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
Case Studies on NASA Mars Rover s Mobility System
 Case Studies on NASA Mars Rover s Mobility System Shih-Liang (Sid) Wang 1 Abstract Motion simulation files based on Working Model 2D TM are developed to simulate Mars rover s mobility system. The rover's
Case Studies on NASA Mars Rover s Mobility System Shih-Liang (Sid) Wang 1 Abstract Motion simulation files based on Working Model 2D TM are developed to simulate Mars rover s mobility system. The rover's
Thinking Outside the Cube
 CHANGING THE ECONOMICS OF SPACE Thinking Outside the Cube 34 th Space Symposium Colorado Springs Monday 16 th April 2018 Anita Bernie a.bernie@sstl.co.uk Commercial in Confidence. SSTL 2017 SpaceNews Home
CHANGING THE ECONOMICS OF SPACE Thinking Outside the Cube 34 th Space Symposium Colorado Springs Monday 16 th April 2018 Anita Bernie a.bernie@sstl.co.uk Commercial in Confidence. SSTL 2017 SpaceNews Home
Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems
 www.dlr.de\rm Chart 1 > ASTRA 2013 - Pan/Tilt-Unit as a Perception Module 16.05.2013 Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems DLR-RMC Robotic and Mechatronic
www.dlr.de\rm Chart 1 > ASTRA 2013 - Pan/Tilt-Unit as a Perception Module 16.05.2013 Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems DLR-RMC Robotic and Mechatronic
Improving co-operation between regional programs and the FCH Joint Undertaking: Hamburg. Heinrich Klingenberg
 Improving co-operation between regional programs and the FCH Joint Undertaking: Hamburg Heinrich Klingenberg 1 Climate Protection in Hamburg European Green Capital 2011 Promotion of energy efficient technologies
Improving co-operation between regional programs and the FCH Joint Undertaking: Hamburg Heinrich Klingenberg 1 Climate Protection in Hamburg European Green Capital 2011 Promotion of energy efficient technologies
UNCLASSIFIED FY 2017 OCO. FY 2017 Base
 Exhibit R-2, RDT&E Budget Item Justification: PB 2017 Air Force Date: February 2016 3600: Research, Development, Test & Evaluation, Air Force / BA 2: Applied Research COST ($ in Millions) Prior Years FY
Exhibit R-2, RDT&E Budget Item Justification: PB 2017 Air Force Date: February 2016 3600: Research, Development, Test & Evaluation, Air Force / BA 2: Applied Research COST ($ in Millions) Prior Years FY
Chassis Concepts for the ExoMars Rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
UNCLASSIFIED: Distribution Statement A. Approved for public release.
 April 2014 - Version 1.1 : Distribution Statement A. Approved for public release. INTRODUCTION TARDEC the U.S. Army s Tank Automotive Research, Development and Engineering Center provides engineering and
April 2014 - Version 1.1 : Distribution Statement A. Approved for public release. INTRODUCTION TARDEC the U.S. Army s Tank Automotive Research, Development and Engineering Center provides engineering and
Lunar Driving Simulator History
 1 of 20 Lunar Driving Simulator History Early NASA MSFC/Northrop MOLAB Concept. This vehicle concept evolved from the study contract NAS8-11096 in support of the early Apollo Logistic Support System studies
1 of 20 Lunar Driving Simulator History Early NASA MSFC/Northrop MOLAB Concept. This vehicle concept evolved from the study contract NAS8-11096 in support of the early Apollo Logistic Support System studies
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
CRUSADER. A full vehicle integration facility. Crossfunctional unique systemtest approach driven by entire relationships
 CRUSADER A full vehicle integration facility Crossfunctional unique systemtest approach driven by entire relationships An innovative vehicle-in-the-loop test bench We're talking about... CRUSADER an Unique
CRUSADER A full vehicle integration facility Crossfunctional unique systemtest approach driven by entire relationships An innovative vehicle-in-the-loop test bench We're talking about... CRUSADER an Unique
REU: Improving Straight Line Travel in a Miniature Wheeled Robot
 THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
ABB MEASUREMENT & ANALYTICS. Predictive Emission Monitoring Systems The new approach for monitoring emissions from industry
 ABB MEASUREMENT & ANALYTICS Predictive Emission Monitoring Systems The new approach for monitoring emissions from industry 2 P R E D I C T I V E E M I S S I O N M O N I T O R I N G S Y S T E M S M O N
ABB MEASUREMENT & ANALYTICS Predictive Emission Monitoring Systems The new approach for monitoring emissions from industry 2 P R E D I C T I V E E M I S S I O N M O N I T O R I N G S Y S T E M S M O N
Trial 3 Bus Demonstration. Spring 2018
 Trial Bus Demonstration Spring 018 What is VENTURER? Where did we do it? VENTURER is a 5m research and development project funded by government and industry and delivered by Innovate UK. Throughout the
Trial Bus Demonstration Spring 018 What is VENTURER? Where did we do it? VENTURER is a 5m research and development project funded by government and industry and delivered by Innovate UK. Throughout the
Design and Simulation of New Versions of Tube Launched UAV
 21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 Design and Simulation of New Versions of Tube Launched UAV Y. Zhou and
21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 Design and Simulation of New Versions of Tube Launched UAV Y. Zhou and
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Antares Rocket Launch recorded on 44 1 Beyond HD DDR recorders Controlled by 61 1 Beyond Systems total
 The 1 Beyond ultra-reliable Event DDR and Storage design won the NASA contract to supply the world s largest HD-DDR event recorder which is critical to the new Antares Rocket countdown and launch control
The 1 Beyond ultra-reliable Event DDR and Storage design won the NASA contract to supply the world s largest HD-DDR event recorder which is critical to the new Antares Rocket countdown and launch control
VALET project: how connected and automated driving will change urban parking? Proposition technique
 VALET project: how connected and automated driving will change urban parking? Proposition technique 1 AKKA Vision on the future of mobility EE architecture Powertrain Power storage New body design Robotised
VALET project: how connected and automated driving will change urban parking? Proposition technique 1 AKKA Vision on the future of mobility EE architecture Powertrain Power storage New body design Robotised
Landing Targets and Technical Subjects for SELENE-2
 Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Smart systems. Smart traffic. Siemens Intelligent Traffic Systems
 Smart systems. Smart traffic. Siemens Intelligent Traffic Systems Unrestricted Siemens AG 2019 siemens.com/traffic The world of mobility is facing tremendous challenges We are facing the next mobility
Smart systems. Smart traffic. Siemens Intelligent Traffic Systems Unrestricted Siemens AG 2019 siemens.com/traffic The world of mobility is facing tremendous challenges We are facing the next mobility
A Joint initiative by ProRail and Network Rail for ETCS Level 3 Hybrid Demonstration
 A Joint initiative by ProRail and Network Rail for ETCS Level 3 Hybrid Demonstration 59 60 41 46 Britain s railways are booming but are facing a capacity crunch Passenger numbers have doubled since 1996
A Joint initiative by ProRail and Network Rail for ETCS Level 3 Hybrid Demonstration 59 60 41 46 Britain s railways are booming but are facing a capacity crunch Passenger numbers have doubled since 1996
Design and Testing of the Spartan USV Mine Warfare Module
 Design and Testing of the Spartan USV Mine Warfare Module 14 June, 2005 Dr. Robert Mons Sr. Advisory Engineer Northrop Grumman Corporation Acknowledgement This work was sponsored by The Naval Undersea
Design and Testing of the Spartan USV Mine Warfare Module 14 June, 2005 Dr. Robert Mons Sr. Advisory Engineer Northrop Grumman Corporation Acknowledgement This work was sponsored by The Naval Undersea
Table of Contents. Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.
 Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.") March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
Advancing the TWV Fleet 10 May 2016
 U.S. ARMY TANK AUTOMOTIVE RESEARCH, DEVELOPMENT AND ENGINEERING CENTER Advancing the TWV Fleet 10 May 2016 Mr. Magid Athnasios, SES TARDEC Executive Director Systems Integration and Engineering Mission
U.S. ARMY TANK AUTOMOTIVE RESEARCH, DEVELOPMENT AND ENGINEERING CENTER Advancing the TWV Fleet 10 May 2016 Mr. Magid Athnasios, SES TARDEC Executive Director Systems Integration and Engineering Mission
Design Development and Testing of the Ground Renewable Expeditionary ENergy System
 Design Development and Testing of the Ground Renewable Expeditionary ENergy System Eric Shields, Alex Askari NSWC Carderock, 5/4/2011 1 Battery Technology Group Three Primary Work Areas Lithium Battery
Design Development and Testing of the Ground Renewable Expeditionary ENergy System Eric Shields, Alex Askari NSWC Carderock, 5/4/2011 1 Battery Technology Group Three Primary Work Areas Lithium Battery
Measurement made easy. Predictive Emission Monitoring Systems The new approach for monitoring emissions from industry
 Measurement made easy Predictive Emission Monitoring Systems The new approach for monitoring emissions from industry ABB s Predictive Emission Monitoring Systems (PEMS) Experts in emission monitoring ABB
Measurement made easy Predictive Emission Monitoring Systems The new approach for monitoring emissions from industry ABB s Predictive Emission Monitoring Systems (PEMS) Experts in emission monitoring ABB
Innovative Mars exploration rover using inflatable or unfolding wheels
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
Staff Report. Subject: Autonomous Shuttle Demonstration on CV Link in April Eric Cowle, Transportation Program Manager
 ITEM 7D Staff Report Subject: Autonomous Shuttle Demonstration on CV Link in April 2018 Contact: Eric Cowle, Transportation Program Manager (ecowle@cvag.org) Recommendation: Approve a not-to-exceed amount
ITEM 7D Staff Report Subject: Autonomous Shuttle Demonstration on CV Link in April 2018 Contact: Eric Cowle, Transportation Program Manager (ecowle@cvag.org) Recommendation: Approve a not-to-exceed amount
Akku4Future. (Acronym: Akku4Future Dis)
") Akku4Future (Acronym: Akku4Future Dis) E-Mobility Strategy Outline of the Akku4future project region A summary of potentials and strategies of South Tyrol (I) Veneto (I) Carinthia (A) Akku4Future (Acronym:
Akku4Future (Acronym: Akku4Future Dis) E-Mobility Strategy Outline of the Akku4future project region A summary of potentials and strategies of South Tyrol (I) Veneto (I) Carinthia (A) Akku4Future (Acronym:
Final Report. James Buttice B.L.a.R.R. EEL 5666L Intelligent Machine Design Laboratory. Instructors: Dr. A Antonio Arroyo and Dr. Eric M.
 Final Report James Buttice B.L.a.R.R. EEL 5666L Intelligent Machine Design Laboratory Instructors: Dr. A Antonio Arroyo and Dr. Eric M. Schwartz Teaching Assistants: Mike Pridgen and Thomas Vermeer Table
Final Report James Buttice B.L.a.R.R. EEL 5666L Intelligent Machine Design Laboratory Instructors: Dr. A Antonio Arroyo and Dr. Eric M. Schwartz Teaching Assistants: Mike Pridgen and Thomas Vermeer Table
Hybrid Nanopositioning Systems with Piezo Actuators
 Hybrid Nanopositioning Systems with Piezo Actuators Long Travel Ranges, Heavy Loads, and Exact Positioning Physik Instrumente (PI) GmbH & Co. KG, Auf der Roemerstrasse 1, 76228 Karlsruhe, Germany Page
Hybrid Nanopositioning Systems with Piezo Actuators Long Travel Ranges, Heavy Loads, and Exact Positioning Physik Instrumente (PI) GmbH & Co. KG, Auf der Roemerstrasse 1, 76228 Karlsruhe, Germany Page
Smart Cities Industry, Technology and Citizens. December 2017 Dr. Fritz Rettberg
 Smart Cities Industry, Technology and Citizens December 2017 Dr. Fritz Rettberg Institut Grid dynamics and stability Measurement and automation systems Transmission grid and energy markets Distribution
Smart Cities Industry, Technology and Citizens December 2017 Dr. Fritz Rettberg Institut Grid dynamics and stability Measurement and automation systems Transmission grid and energy markets Distribution
FRANKONIA. EDTC E-Drive Testing Chamber
 EDTC E-Drive Testing Chamber E-Drive Testing Chamber Frankonia s EMC testing solution for powertrain components and systems relating to hybrid, electric, fuel cell and battery drive systems FRANKONIA FRANKONIA
EDTC E-Drive Testing Chamber E-Drive Testing Chamber Frankonia s EMC testing solution for powertrain components and systems relating to hybrid, electric, fuel cell and battery drive systems FRANKONIA FRANKONIA
On the way to a leading Smart City in Europe
 On the way to a leading Smart City in Europe Christoph Münch On the way to a leading Smart City in Europe Future City 2025+ climate and emissions sustainable mobility transition to renewable energy Future
On the way to a leading Smart City in Europe Christoph Münch On the way to a leading Smart City in Europe Future City 2025+ climate and emissions sustainable mobility transition to renewable energy Future
Historical Perspectives: Evolution of Recent Mars EDL Systems Development. 6th International Planetary Probe Workshop June 2008 Erisa K Hines
 Historical Perspectives: Evolution of Recent Mars EDL Systems Development 6th International Planetary Probe Workshop 23-27 June 2008 Erisa K Hines Overview An examination of the EDL system engineering
Historical Perspectives: Evolution of Recent Mars EDL Systems Development 6th International Planetary Probe Workshop 23-27 June 2008 Erisa K Hines Overview An examination of the EDL system engineering
FTA Low Speed Magnetic Levitation Program
 U.S. DEPARTMENT OF FTA Low Speed Magnetic Levitation Program Fourth Plenary Meeting U.S. - Republic of Korea Transportation Experts January 26 Walter Kulyk, P. E. Federal Transit Administration U.S. Department
U.S. DEPARTMENT OF FTA Low Speed Magnetic Levitation Program Fourth Plenary Meeting U.S. - Republic of Korea Transportation Experts January 26 Walter Kulyk, P. E. Federal Transit Administration U.S. Department
Grid Impact of Electric Vehicles with Secondary Control Reserve Capability
 Grid Impact of Electric Vehicles with Secondary Control Reserve Capability Thomas Degner, Gunter Arnold, Ron Brandl, Julian Dollichon, Alexander Scheidler Division System Technology and Distribution Grids
Grid Impact of Electric Vehicles with Secondary Control Reserve Capability Thomas Degner, Gunter Arnold, Ron Brandl, Julian Dollichon, Alexander Scheidler Division System Technology and Distribution Grids
NEW ENERGY -4- MOBILITY TECHNOLOGIES
 April 2017 Anne Kleczka; BMW Group Hannover Fair 2017 BMW TECHNOLOGY FOCUS AREAS. BMW Group Technology Focus Areas. Powertrain Digitalization Efficient Dynamics NEXT E-Drive Hydrogen Connectivity Artificial
April 2017 Anne Kleczka; BMW Group Hannover Fair 2017 BMW TECHNOLOGY FOCUS AREAS. BMW Group Technology Focus Areas. Powertrain Digitalization Efficient Dynamics NEXT E-Drive Hydrogen Connectivity Artificial