Robo$cs Mission Experience from Mars. Brian Wilcox Mark Maimone Andy Mishkin 5 August 2009
|
|
|
- Harvey Parsons
- 6 years ago
- Views:
Transcription

1 Robo$cs Mission Experience from Mars Brian Wilcox Mark Maimone Andy Mishkin 5 August 2009
 for attitude determination during motion Six wheel rockerbogie mobility")
2 MER Mobility Hardware Wide FOV stereo HAZCAMs (front & rear) for on-board hazard detection Stereo NAVCAMS & PANCAMS used by ground team for planning. PANCAM used for sun based attitude update No bumpers/contact sensors on rover body or solar panels IMU(internal) for attitude determination during motion Six wheel rockerbogie mobility system, steering at four corners IDD
3 MER Driving Speeds Directed ( blind ): 120 m/hr. Gear ra$os limit top mechanical speed to 5 cm/sec (180 m/hr), but nominally no more than 3.7 cm/sec (133 m/ hr, less cool off/re steer periods). Hazard avoidance ( AutoNav ): m/hr. Rover moves in 50 cm steps, but only images every 1.5 m (Spirit) or 2 m (Opportunity) in benign terrain. When obstacles are nearby, imaging occurs at each step. Visual Odometry ( VisOdom ): 12 m/hr. Desire is to have 60% image overlap; in NAVCAMs pointed nearby, that limits mo$ons to at most 60cm forward or 18 degrees turning in place.
4 Drive Constraints Typically only enough power to drive 4 hours/day Rover generally sleeps from ; humans plan next day's ac$vi$es while it sleeps, e.g. human terrain assessment enables a blind drive A single VisOdom or AutoNav imaging step takes between 2 and 3 minutes (20MHz CPU, 90+ tasks) Onboard terrain analysis only performs geometric assessment; humans must decide when to use VisOdom instead of/in addi$on to AutoNav Placement of Arm requires O(10cm) precision vehicle posi$oning, ofen with heading constraint

5 Spirit Sol 106: Avoiding a 21cm rock NASA/JPL Caltech

6 Visual Odometry Processing VisOdom enables precise posi$on es$mates, even in the presence of slip, and enables Slip Checks and Keep out zone reac$ve checks


7 Lessons Learned: Opportunity Slip Check On B 446, 50 meters of blind driving made only 2 meters progress, burying the wheels. Recovery Bme: 5 weeks. On B 603, 5 meters of blind driving made 4 meters progress (stopped by Visodom with 44% slip). Recovery Bme: 1 day.

")
8 Slip Check Prevents Digging In Next day Opportunity drove directly out of the sand ripple. A great improvement over the similar situation on Sol 446 (which, without VisOdom, took over a month to resolve) NASA/JPL Caltech NASA/JPL Caltech


9 Lessons Learned: Spirit Slip Check On A 345, Spirit stalled because a potato sized rock had gonen wedged inside a wheel. Recovery Bme: 1 week. On A 454, Spirit detected 90% slip and stopped with rocks poised to enter the wheel. Recovery Bme: 1 day.
10 Opportunity Drive Modes in first 410 Sols Data from rover's onboard position estimate
11 Opportunity Tilt History through Sol 380
12 Spirit Drive History through Sol 588 Drive toward Columbia Hills Bonneville Crater Rim Outcrop! Data from rover's onboard position estimate
13 Benefits of Onboard Terrain Assessment Terrain Assessment Extends Drive Range Safely Human drivers plan directed drives as far as groundbased imagery and range data allow, (typically at most meters at speeds up to 120 m/hr) then let the onboard system use the rest of the available drive Bme (12 35 m/hr) Extra insurance against unexpected events Faster to plan than directed drives Op$mis$c IDD use Enabled by Guarded Arcs and Go and Touch stereo vision as of R9.2
14 Benefits of Visual Odometry VisOdom Increases Science Return Provides robust mid drive poinbng; even if you slip, the proper target can sbll be imaged Enables difficult approaches to targets in fewer Sols; drive sequences condibonal on posibon VisOdom improves Rover Safety Keep out zones; if you slide too close to known hazards, abort the drive Slip checks; if you're not making enough forward process, abort the drive


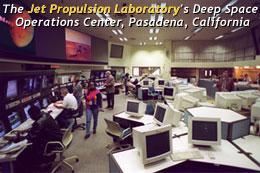






15 National Aeronautics and Space Administration Jet Propulsion Laboratory California Institute of Technology Pasadena, California MER Daily Surface Ops Cycle (early prime mission) Execute Assess & Analyze Plan Observations & Measurements Communicate Generate Data Products ~18 hour planning cycle 7 days a week Mars-time Prepare Command Products Integrate Activity Plan Mishkin 15 Sequence & Simulate Test (if needed)
16 National Aeronautics and Space Administration Jet Propulsion Laboratory California Institute of Technology Pasadena, California Sample Issues for Planning a Sol How choose rock? Traverse plan safe? Target in IDD (rover arm) workspace? Plan within rover resources? Trade comm pass for science? Complexity of plan within human resources? Tactical Operations Technical Challenges Critical data fits into downlink? Instrument conflicts w/uhf comm Position rover to maximize solar energy? Enough energy for next sol? Turn rover for comm feasible? 16
17 National Aeronautics and Space Administration Jet Propulsion Laboratory California Institute of Technology Pasadena, California Drivers on the Original MER Operations Design Limited Lifetime Dust accumulation on solar arrays and seasonal changes expected to end rovers useful surface mission lives Reactive Operations Rover plan for tomorrow depends on results from today Traverse uncertainties (autonomous hazard avoidance, wheel slippage) Science targets identified via telemetry from local rover observations Resource Constraints (energy, data, time) Communications Constraints Limited uplink opportunities (~1/sol) ~20Mbit per/sol direct-to-earth downlink each Mars afternoon Time Delay ~6 to 40-minute roundtrip communications time delays No joysticking possible Every-sol Commanding 7-day-a-week 18-hour command turnaround process Mars-Time Rovers and operations team slaved to Mars day-night cycle Workshifts begin 40 minutes later every day 17
18 National Aeronautics and Space Administration Jet Propulsion Laboratory California Institute of Technology Pasadena, California Why Work Mars Time? Provides maximum number of usable workhours between afternoon downlink and morning uplink Allows maximum resilience for teams in early surface mission (phase of maximum uncertainty) Minimizes required level of cross-training across teams Key spacecraft and ground events are tightly coordinated Sol n afternoon downlink triggers uplink planning process (downlink analysis, science planning meetings, activity plan approval, command and radiation approval) which must complete in time for sol n+1 uplink Spacecraft and ground activities happen at a consistent time on the Mars clock Personnel have clear understanding of when spacecraft events will occur Easy to know what s happening on Mars right now Contributes to team building 18
19 National Aeronautics and Space Administration Jet Propulsion Laboratory California Institute of Technology Pasadena, California Extended Mission #1: Returning to Earth Mars-time not sustainable Never intended to support long-duration mission How to get operations team off of Mars-time? Reduce tactical process duration (produces time margin) Additional automation for increased process efficiency Increased team experience Buildup of command sequence libraries Spend time margin to eliminate night shifts Problem: Downlink now walks through Earth-day workshift Solution: Sliding Earth-time schedule Nominal sols: Downlink received before start of workday Workday ~0800 to ~1700 Slide sols: Downlink received early in workday (<1300) Start of workday shifts as late as 1300 Restricted sols: Downlink received too late in day (>1300), or uplink is too early in day (<1600) Plan using 1-sol-old telemetry Restricts rover driving to every-other-sol Tight sols: Uplink occurs near end of workshift ( ) Minimal or no time margin Start workday at 0700 or
20 National Aeronautics and Space Administration Jet Propulsion Laboratory California Institute of Technology Pasadena, California Extended Mission #2: Distributed Operations Drivers on distributed operations for science team Allows return of scientists to home institutions (and families) Potential reductions in operations costs Reduces facility requirements Enablers Nearly paperless process for original fast tactical operations provided information distribution capability for distributed team Webcams, open teleconference lines, web-based reports and online documentation all supported remote team participation Workstations configured with key activity planning and command sequencing tools installed at remote sites Engineering team remains co-located at JPL 20

21 Fast Waypoint Designa$on In 1988, JPL modified a HMMWV for waypoint designa$on in a stereo display. Objec$ve was to reduce designa$on $me to 3 10 seconds. 10 seconds was achievable; 3 seconds was not.
22 National Aeronautics and Space Administration Jet Propulsion Laboratory California Institute of Technology Pasadena, California Continuing Evolution Aging rovers Process and software workarounds Additional operations complexity New flight software Fixes that simplify operations New capabilities/technology experiments that increase risk and complexity Changing Martian seasons Summer: Thermal constraints Winter: Energy availability Rover survivability Additional consequence: Downlink data volume limitations, challenging onboard data management Changing operations environment at Mars Competition for communications resources Over-subscribed DSN MRO mission frequently consumes Spirit rover communications opportunities on short notice MER responses Process for forward link commanding through Mars Odyssey orbiter Multi-sol plans to make maximum use of available uplink opportunities 22
Mars Exploration Rover Surface Operations: Driving Spirit at Gusev Crater
 Mars Exploration Rover Surface Operations: Driving Spirit at Gusev Crater P. Chris Leger, Ashitey Trebi-Ollennu, John R. Wright, Scott A. Maxwell, Robert G. Bonitz, Jeffrey J. Biesiadecki, Frank R. Hartman,
Mars Exploration Rover Surface Operations: Driving Spirit at Gusev Crater P. Chris Leger, Ashitey Trebi-Ollennu, John R. Wright, Scott A. Maxwell, Robert G. Bonitz, Jeffrey J. Biesiadecki, Frank R. Hartman,
This is Ground Control... Professor Derek Long Department of Informatics King s College London
 This is Ground Control... Professor Derek Long Department of Informatics King s College London Deep in Space... Rosetta and Philae 67P/Churyumov-Gerasimenko Launch 2004, arrive 2014 Mars Express 2003 Mars
This is Ground Control... Professor Derek Long Department of Informatics King s College London Deep in Space... Rosetta and Philae 67P/Churyumov-Gerasimenko Launch 2004, arrive 2014 Mars Express 2003 Mars
THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS. Nagin Cox
 THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS Nagin Cox Jet Propulsion Laboratory National Air & Space Administration/California Institute of Technology Email: nagin@jpl.nasa.gov Abstract: Since
THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS Nagin Cox Jet Propulsion Laboratory National Air & Space Administration/California Institute of Technology Email: nagin@jpl.nasa.gov Abstract: Since
Tradeoffs Between Directed and Autonomous Driving on the Mars Exploration Rovers
 Tradeoffs Between Directed and Autonomous Driving on the Mars Exploration Rovers Jeffrey J. Biesiadecki, Chris Leger, and Mark W. Maimone Jet Propulsion Laboratory California Institute of Technology Pasadena,
Tradeoffs Between Directed and Autonomous Driving on the Mars Exploration Rovers Jeffrey J. Biesiadecki, Chris Leger, and Mark W. Maimone Jet Propulsion Laboratory California Institute of Technology Pasadena,
Formation Flying Experiments on the Orion-Emerald Mission. Introduction
 Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Lunette: A Global Network of Small Lunar Landers
 Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Tradeoffs Between Directed and Autonomous Driving on the Mars Exploration Rovers
 Tradeoffs Between Directed and Autonomous Driving on the Mars Exploration Rovers Jeffrey J. Biesiadecki and Chris Leger and Mark W. Maimone Jet Propulsion Laboratory California Institute of Technology
Tradeoffs Between Directed and Autonomous Driving on the Mars Exploration Rovers Jeffrey J. Biesiadecki and Chris Leger and Mark W. Maimone Jet Propulsion Laboratory California Institute of Technology
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science
 Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration
 National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, GMT
 Friday, October 30, GMT") Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Smart Robots on Mars: Deciding Where to Go and. What to See
 Smart Robots on Mars: Deciding Where to Go and What to See Kiri L. Wagstaff September 16, 2008 INTRODUCTION T he planet Mars has much in common with the Earth, including a similar rocky composition and
Smart Robots on Mars: Deciding Where to Go and What to See Kiri L. Wagstaff September 16, 2008 INTRODUCTION T he planet Mars has much in common with the Earth, including a similar rocky composition and
 Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
Light-Lift Rocket II
 Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
LUNAR INDUSTRIAL RESEARCH BASE. Yuzhnoye SDO proprietary
 LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
Challenges of Designing the MarsNEXT Network
 Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Next Steps in Human Exploration: Cislunar Systems and Architectures
 Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
DRIVING ON THE SURFACE OF MARS USING THE ROVER CONTROL WORKSTATION
 DRIVING ON THE SURFACE OF MARS USING THE ROVER CONTROL WORKSTATION Brian K. Cooper Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive Pasadena, CA 91109 818-354-6298 brian.k.cooper@jpl.nasa.gov
DRIVING ON THE SURFACE OF MARS USING THE ROVER CONTROL WORKSTATION Brian K. Cooper Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive Pasadena, CA 91109 818-354-6298 brian.k.cooper@jpl.nasa.gov
System Testing by Flight Operators the Rosetta Experience
 European Space Operations Center System Testing by Flight Operators the Rosetta Experience E. Montagnon, P. Ferri, L. O Rourke, A. Accomazzo, I. Tanco, J. Morales, M. Sweeney Spaceops 2004, Montréal, Canada,
European Space Operations Center System Testing by Flight Operators the Rosetta Experience E. Montagnon, P. Ferri, L. O Rourke, A. Accomazzo, I. Tanco, J. Morales, M. Sweeney Spaceops 2004, Montréal, Canada,
Mars Surface Mobility Proposal
 Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
Overview of Intelligent Power Controller Development for the Deep Space Gateway
 Overview of Intelligent Power Controller Development for the Deep Space Gateway Jeffrey Csank NASA Glenn Research Center Presented to Energy Tech 2017 Cleveland, Ohio Agenda Overview of NASA Vision Deep
Overview of Intelligent Power Controller Development for the Deep Space Gateway Jeffrey Csank NASA Glenn Research Center Presented to Energy Tech 2017 Cleveland, Ohio Agenda Overview of NASA Vision Deep
Lunar Architecture and LRO
 Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Lessons in Systems Engineering. The SSME Weight Growth History. Richard Ryan Technical Specialist, MSFC Chief Engineers Office
 National Aeronautics and Space Administration Lessons in Systems Engineering The SSME Weight Growth History Richard Ryan Technical Specialist, MSFC Chief Engineers Office Liquid Pump-fed Main Engines Pump-fed
National Aeronautics and Space Administration Lessons in Systems Engineering The SSME Weight Growth History Richard Ryan Technical Specialist, MSFC Chief Engineers Office Liquid Pump-fed Main Engines Pump-fed
Heat Shield Design Project
 Name Class Period Heat Shield Design Project The heat shield is such a critical piece, not just for the Orion mission, but for our plans to send humans into deep space. Final Points Earned Class Participation/Effort
Name Class Period Heat Shield Design Project The heat shield is such a critical piece, not just for the Orion mission, but for our plans to send humans into deep space. Final Points Earned Class Participation/Effort
The Mars Express Mission A Continuing Challenge. Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner
 The Mars Express Mission A Continuing Challenge Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner Mars Society, Munich, 13 October, 2012 The Mars Express Mission - a First in
The Mars Express Mission A Continuing Challenge Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner Mars Society, Munich, 13 October, 2012 The Mars Express Mission - a First in
The Common Spacecraft Bus and Lunar Commercialization
 The Common Spacecraft Bus and Lunar Commercialization Alex MacDonald NASA Ames Research Center alex.macdonald@balliol.ox.ac.uk Will Marshall NASA Ames Research Center william.s.marshall@nasa.gov Summary
The Common Spacecraft Bus and Lunar Commercialization Alex MacDonald NASA Ames Research Center alex.macdonald@balliol.ox.ac.uk Will Marshall NASA Ames Research Center william.s.marshall@nasa.gov Summary
Adrestia. A mission for humanity, designed in Delft. Challenge the future
 Adrestia A mission for humanity, designed in Delft 1 Adrestia Vision Statement: To inspire humanity by taking the next step towards setting a footprint on Mars Mission Statement Our goal is to design an
Adrestia A mission for humanity, designed in Delft 1 Adrestia Vision Statement: To inspire humanity by taking the next step towards setting a footprint on Mars Mission Statement Our goal is to design an
SUBJECT AREA(S): Amperage, Voltage, Electricity, Power, Energy Storage, Battery Charging
: Amperage, Voltage, Electricity, Power, Energy Storage, Battery Charging") Solar Transportation Lesson 4: Designing a Solar Charger AUTHOR: Clayton Hudiburg DESCRIPTION: In this lesson, students will further explore the potential and challenges related to using photovoltaics
Solar Transportation Lesson 4: Designing a Solar Charger AUTHOR: Clayton Hudiburg DESCRIPTION: In this lesson, students will further explore the potential and challenges related to using photovoltaics
Name: Space Exploration PBL
 Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
NEXT Exploration Science and Technology Mission. Relevance for Lunar Exploration
 NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
Europa Lander. Mission Concept Update 3/29/2017
 Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
Industrial-and-Research Lunar Base
 Industrial-and-Research Lunar Base STRATEGY OF LUNAR BASE CREATION Phase 1 Preparatory: creation of international cooperation, investigation of the Moon by unmanned spacecraft, creation of space transport
Industrial-and-Research Lunar Base STRATEGY OF LUNAR BASE CREATION Phase 1 Preparatory: creation of international cooperation, investigation of the Moon by unmanned spacecraft, creation of space transport
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
Landing Targets and Technical Subjects for SELENE-2
 Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Unmanned Surface Vessels - Opportunities and Technology
 Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
The European Lunar Lander Mission
 The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
Resource Prospector Traverse Planning
 Resource Prospector Traverse Planning Jennifer Heldmann (NASA Ames / NASA Headquarters) Anthony Colaprete (NASA Ames Research Center) Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters)
Resource Prospector Traverse Planning Jennifer Heldmann (NASA Ames / NASA Headquarters) Anthony Colaprete (NASA Ames Research Center) Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters)
Human Exploration of the Lunar Surface
 International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
CHAPTER 1 INTRODUCTION
 CHAPTER 1 INTRODUCTION The development of Long March (LM) launch vehicle family can be traced back to the 1960s. Up to now, the Long March family of launch vehicles has included the LM-2C Series, the LM-2D,
CHAPTER 1 INTRODUCTION The development of Long March (LM) launch vehicle family can be traced back to the 1960s. Up to now, the Long March family of launch vehicles has included the LM-2C Series, the LM-2D,
OMOTENASHI. (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor)
") SLS EM-1 secondary payload OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) The smallest moon lander launched by the most powerful rocket in the world * Omotenashi
SLS EM-1 secondary payload OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) The smallest moon lander launched by the most powerful rocket in the world * Omotenashi
FIDO ROVER FIELD TRIALS AS REHEARSAL FOR THE NASA 2003 MARS EXPLORATION ROVERS MISSION
 FIDO ROVER FIELD TRIALS AS REHEARSAL FOR THE NASA 2003 MARS EXPLORATION ROVERS MISSION Edward Tunstel, Terry Huntsberger, Hrand Aghazarian, Paul Backes, Eric Baumgartner, Yang Cheng, Michael Garrett, Brett
FIDO ROVER FIELD TRIALS AS REHEARSAL FOR THE NASA 2003 MARS EXPLORATION ROVERS MISSION Edward Tunstel, Terry Huntsberger, Hrand Aghazarian, Paul Backes, Eric Baumgartner, Yang Cheng, Michael Garrett, Brett
PEAK DEMAND MANAGEMENT IN NEW ENGLAND A DYNAMIC SOLUTION TO MANAGING PEAK DEMAND CHARGES
 PEAK DEMAND MANAGEMENT IN NEW ENGLAND A DYNAMIC SOLUTION TO MANAGING PEAK DEMAND CHARGES What are peak demand (capacity) charges? Every month your business is charged a fee called a capacity charge or
PEAK DEMAND MANAGEMENT IN NEW ENGLAND A DYNAMIC SOLUTION TO MANAGING PEAK DEMAND CHARGES What are peak demand (capacity) charges? Every month your business is charged a fee called a capacity charge or
Research Issues and Results to Date" on Robotic Exploration of Mars!
 Research Issues and Results to Date" on! Larry Matthies! Computer Vision Group! California Institute of Technology! Science Themes for Mars Exploration! W A T E R Look for Life Understand Climate Explore
Research Issues and Results to Date" on! Larry Matthies! Computer Vision Group! California Institute of Technology! Science Themes for Mars Exploration! W A T E R Look for Life Understand Climate Explore
Reference Science Scenario for SDT Report
 MARS 2007 SMART LANDER Reference Science Scenario for SDT Report 9/17/01 Jennifer Mindock Leslie Tamppari Daniel Limonadi Sue Smrekar Reference Mission Big Picture Total duration of mission = 180 sols
MARS 2007 SMART LANDER Reference Science Scenario for SDT Report 9/17/01 Jennifer Mindock Leslie Tamppari Daniel Limonadi Sue Smrekar Reference Mission Big Picture Total duration of mission = 180 sols
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
From MARS To MOON. V. Giorgio Director of Italian Programs. Sorrento, October, All rights reserved, 2007, Thales Alenia Space
 From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
SPACE LAUNCH SYSTEM. Steve Creech Manager Spacecraft/Payload Integration & Evolution August 29, 2017 A NEW CAPABILITY FOR DISCOVERY
 National Aeronautics and Space Administration 5... 4... 3... 2... 1... SPACE LAUNCH SYSTEM A NEW CAPABILITY FOR DISCOVERY Steve Creech Manager Spacecraft/Payload Integration & Evolution August 29, 2017
National Aeronautics and Space Administration 5... 4... 3... 2... 1... SPACE LAUNCH SYSTEM A NEW CAPABILITY FOR DISCOVERY Steve Creech Manager Spacecraft/Payload Integration & Evolution August 29, 2017
The DoD Space Test Program Standard Interface Vehicle (ESPA) Class Program
 Class Program") The DoD Space Test Program Standard Interface Vehicle (ESPA) Class Program Mr. Mike Marlow STP-SIV Program Manager Co-Authors Lt Col Randy Ripley Capt Chris Badgett Ms. Hallie Walden 20 th Annual AIAA/USU
The DoD Space Test Program Standard Interface Vehicle (ESPA) Class Program Mr. Mike Marlow STP-SIV Program Manager Co-Authors Lt Col Randy Ripley Capt Chris Badgett Ms. Hallie Walden 20 th Annual AIAA/USU
Development and Testing of a High Compact Stepper Motor Mechanism
 Development and Testing of a High Compact Stepper Motor Mechanism Jörg Schmidt * and Greg Wright ** Abstract The Laboratory for Atmospheric and Space Physics (LASP) has developed for the Mars Atmosphere
Development and Testing of a High Compact Stepper Motor Mechanism Jörg Schmidt * and Greg Wright ** Abstract The Laboratory for Atmospheric and Space Physics (LASP) has developed for the Mars Atmosphere
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012
 Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
FlexCore Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft
 FlexCore Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft Dan Hegel Director, Advanced Development Blue Canyon Technologies hegel@bluecanyontech.com BCT Overview BCT
FlexCore Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft Dan Hegel Director, Advanced Development Blue Canyon Technologies hegel@bluecanyontech.com BCT Overview BCT
Design and evaluate vehicle architectures to reach the best trade-off between performance, range and comfort. Unrestricted.
 Design and evaluate vehicle architectures to reach the best trade-off between performance, range and comfort. Unrestricted. Introduction Presenter Thomas Desbarats Business Development Simcenter System
Design and evaluate vehicle architectures to reach the best trade-off between performance, range and comfort. Unrestricted. Introduction Presenter Thomas Desbarats Business Development Simcenter System
1 Evaluation of Power Control System for Micro and Nano Satellites by Hardware-in-the-Loop Simulator
 1 Evaluation of Power Control System for Micro and Nano Satellites by Hardware-in-the-Loop Simulator Yuji Sakamoto, Toshinori Kuwahara, et al. Tohoku University, Japan 16 AUG 2012 Small Satellite Conference
1 Evaluation of Power Control System for Micro and Nano Satellites by Hardware-in-the-Loop Simulator Yuji Sakamoto, Toshinori Kuwahara, et al. Tohoku University, Japan 16 AUG 2012 Small Satellite Conference
Autonomous Sample Acquisition for the ExoMars Rover
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Autonomous Sample Acquisition for
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Autonomous Sample Acquisition for
VISION-BASED NAVIGATION TECHNIQUES IN PLANETARY ROVERS
 REPORT 15.12.2010 VISION-BASED NAVIGATION TECHNIQUES IN PLANETARY ROVERS Hans Baumgartner 6153583 CONTENTS ABBREVIATIONS... 3 1. INTRODUCTION... 4 2. PLANETARY ROVERS... 5 2.1 History... 5 2.2 Sensors
REPORT 15.12.2010 VISION-BASED NAVIGATION TECHNIQUES IN PLANETARY ROVERS Hans Baumgartner 6153583 CONTENTS ABBREVIATIONS... 3 1. INTRODUCTION... 4 2. PLANETARY ROVERS... 5 2.1 History... 5 2.2 Sensors
MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region
 MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region David Willson (david.willson@au.tenovagroup.com) and Jonathan D. A. Clarke (jon.clarke@bigpond.com), Mars Society Australia The centrepiece
MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region David Willson (david.willson@au.tenovagroup.com) and Jonathan D. A. Clarke (jon.clarke@bigpond.com), Mars Society Australia The centrepiece
TacSat-4 I&T, Launch Processing, and Early Flight Operations Experience
 TacSat-4 I&T, Launch Processing, and Early Flight Operations Experience 26 th Small Satellite Conference Bill Raynor US Naval Research Laboratory Naval Center for Space Technology Naval Research Laboratory
TacSat-4 I&T, Launch Processing, and Early Flight Operations Experience 26 th Small Satellite Conference Bill Raynor US Naval Research Laboratory Naval Center for Space Technology Naval Research Laboratory
Le développement technique des véhicules autonomes
 Shaping the future Le développement technique des véhicules autonomes Renaud Dubé, Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Fribourg, 23 Juin 2016 Renaud Dubé 23.06.2016 1 Content
Shaping the future Le développement technique des véhicules autonomes Renaud Dubé, Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Fribourg, 23 Juin 2016 Renaud Dubé 23.06.2016 1 Content
An Overview of CSA s s Space Robotics Activities
 An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
European Lunar Lander: System Engineering Approach
 human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
Jay Gundlach AIAA EDUCATION SERIES. Manassas, Virginia. Joseph A. Schetz, Editor-in-Chief. Blacksburg, Virginia. Aurora Flight Sciences
 Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Design and Testing of a Sample Container to Preserve Rock Cores for Proposed Mars Sample Return
 Design and Testing of a Sample Container to Preserve Rock Cores for Proposed Mars Sample Return Mimi Parker Mechanical Engineering Undergrad, UC Berkeley mimiaudiaparker@gmail.com Mentors: Charles Budney
Design and Testing of a Sample Container to Preserve Rock Cores for Proposed Mars Sample Return Mimi Parker Mechanical Engineering Undergrad, UC Berkeley mimiaudiaparker@gmail.com Mentors: Charles Budney
Deep Learning Will Make Truly Self-Driving Cars a Reality
 Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Power Team Mission Day Instructions
 Overview Power Team Mission Day Instructions Every 90 minutes the space station orbits the earth, passing into and out of the sun s direct light. The solar arrays and batteries work together to provide
Overview Power Team Mission Day Instructions Every 90 minutes the space station orbits the earth, passing into and out of the sun s direct light. The solar arrays and batteries work together to provide
INTRODUCTION Team Composition Electrical System
 IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
LOW DENSITY SUPERSONIC DECELERATOR. Kolby Javinar Department of Electrical Engineering University of Hawai i at Mānoa Honolulu, HI ABSTRACT
 LOW DENSITY SUPERSONIC DECELERATOR Kolby Javinar Department of Electrical Engineering University of Hawai i at Mānoa Honolulu, HI 96822 ABSTRACT During the summer of 2014, NASA planned on testing two new
LOW DENSITY SUPERSONIC DECELERATOR Kolby Javinar Department of Electrical Engineering University of Hawai i at Mānoa Honolulu, HI 96822 ABSTRACT During the summer of 2014, NASA planned on testing two new
Running the Electric Power Grid
 Running the Electric Power Grid Your electricity needs never stop, and neither do we. We keep power flowing across New England. Inside Our Control Room Before electricity is delivered to your street, it
Running the Electric Power Grid Your electricity needs never stop, and neither do we. We keep power flowing across New England. Inside Our Control Room Before electricity is delivered to your street, it
NERC Load Modeling Activities. Ryan D. Quint, PhD, PE Senior Engineer, System Analysis, NERC MRO Fall Reliability Conference November 2016
 NERC Load Modeling Activities Ryan D. Quint, PhD, PE Senior Engineer, System Analysis, NERC MRO Fall Reliability Conference November 2016 Introduction Kickoff January 2016 LMTF webpage Chair: Dmitry Kosterev,
NERC Load Modeling Activities Ryan D. Quint, PhD, PE Senior Engineer, System Analysis, NERC MRO Fall Reliability Conference November 2016 Introduction Kickoff January 2016 LMTF webpage Chair: Dmitry Kosterev,
OLEV AN ON-ORBIT SERVICING PROGRAM FOR COMMERCIAL SPACECRAFTS IN GEO
 Von der Erde ins All. Und zurück. Intelligente Lösungen für Industrie und Wissenschaft. From Earth to Space. And back. Intelligent solutions for industry and science. E a r t h S p a c e & F u t u r e
Von der Erde ins All. Und zurück. Intelligente Lösungen für Industrie und Wissenschaft. From Earth to Space. And back. Intelligent solutions for industry and science. E a r t h S p a c e & F u t u r e
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity
 The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
Solutions for Smarter Power Markets
 Solutions for Smarter Power Markets Eric GOUTARD Alstom Grid 6-8 March 2011 GRID 1 ALSTOM APEx- APAC Regional Meet 2011, 6th -8th March 2011, New Delhi Key Drivers for Smart Grids 1. Maximize CO2 free
Solutions for Smarter Power Markets Eric GOUTARD Alstom Grid 6-8 March 2011 GRID 1 ALSTOM APEx- APAC Regional Meet 2011, 6th -8th March 2011, New Delhi Key Drivers for Smart Grids 1. Maximize CO2 free
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return
 Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
Results of the Airbus DS led e.deorbit Phase B1 ESA study. Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, October 2017
 Results of the Airbus DS led e.deorbit Phase B1 ESA study Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, 24-26 October 2017 2 e.deorbit Mission Final rendezvous and capture phase Phase B1 Team
Results of the Airbus DS led e.deorbit Phase B1 ESA study Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, 24-26 October 2017 2 e.deorbit Mission Final rendezvous and capture phase Phase B1 Team
Written Exam Public Transport + Answers
 Faculty of Engineering Technology Written Exam Public Transport + Written Exam Public Transport (195421200-1A) Teacher van Zuilekom Course code 195421200 Date and time 7-11-2011, 8:45-12:15 Location OH116
Faculty of Engineering Technology Written Exam Public Transport + Written Exam Public Transport (195421200-1A) Teacher van Zuilekom Course code 195421200 Date and time 7-11-2011, 8:45-12:15 Location OH116
Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers
 Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers Instructions You have just been notified that NASA is planning to launch another Mars Rover Mission and you are going to design
Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers Instructions You have just been notified that NASA is planning to launch another Mars Rover Mission and you are going to design
WHITE PAPER. Preventing Collisions and Reducing Fleet Costs While Using the Zendrive Dashboard
 WHITE PAPER Preventing Collisions and Reducing Fleet Costs While Using the Zendrive Dashboard August 2017 Introduction The term accident, even in a collision sense, often has the connotation of being an
WHITE PAPER Preventing Collisions and Reducing Fleet Costs While Using the Zendrive Dashboard August 2017 Introduction The term accident, even in a collision sense, often has the connotation of being an
Shaping the future of the TWV Fleet
 U.S. ARMY TANK AUTOMOTIVE RESEARCH, DEVELOPMENT AND ENGINEERING CENTER Shaping the future of the TWV Fleet Dr. Paul Rogers Director, TARDEC, Distribution A Who is TARDEC? MISSION: Develop, integrate and
U.S. ARMY TANK AUTOMOTIVE RESEARCH, DEVELOPMENT AND ENGINEERING CENTER Shaping the future of the TWV Fleet Dr. Paul Rogers Director, TARDEC, Distribution A Who is TARDEC? MISSION: Develop, integrate and
RESILIENT SOLAR CASE STUDY: SUNY New Paltz NYPA Integrated Grid Pilot
 PROJECTS UNDER DEVELOPMENT PROJECT SNAPSHOTS Location: SUNY New Paltz, NYS System Owners: Direct Purchase SUNY New Paltz Campus Project Goal: Resilience, energy savings, grid services, and research System
PROJECTS UNDER DEVELOPMENT PROJECT SNAPSHOTS Location: SUNY New Paltz, NYS System Owners: Direct Purchase SUNY New Paltz Campus Project Goal: Resilience, energy savings, grid services, and research System
Historical Perspectives: Evolution of Recent Mars EDL Systems Development. 6th International Planetary Probe Workshop June 2008 Erisa K Hines
 Historical Perspectives: Evolution of Recent Mars EDL Systems Development 6th International Planetary Probe Workshop 23-27 June 2008 Erisa K Hines Overview An examination of the EDL system engineering
Historical Perspectives: Evolution of Recent Mars EDL Systems Development 6th International Planetary Probe Workshop 23-27 June 2008 Erisa K Hines Overview An examination of the EDL system engineering
Park Smart. Parking Solution for Smart Cities
 Park Smart Parking Solution for Smart Cities Finding a car parking often becomes a real problem that causes loss of time, increasing pollution and traffic. According to the insurer Allianz in industrialized
Park Smart Parking Solution for Smart Cities Finding a car parking often becomes a real problem that causes loss of time, increasing pollution and traffic. According to the insurer Allianz in industrialized
ME 455 Lecture Ideas, Fall 2010
 ME 455 Lecture Ideas, Fall 2010 COURSE INTRODUCTION Course goal, design a vehicle (SAE Baja and Formula) Half lecture half project work Group and individual work, integrated Design - optimal solution subject
ME 455 Lecture Ideas, Fall 2010 COURSE INTRODUCTION Course goal, design a vehicle (SAE Baja and Formula) Half lecture half project work Group and individual work, integrated Design - optimal solution subject
ONE FLEET SOLUTION. Combining noon reports with automated data. ORKA SUMMIT September September
 ONE FLEET SOLUTION Combining noon reports with automated data ORKA SUMMIT September 2015 15 September 2015 1 AGENDA Introduction to Nordic Tankers Motivation for Performance Management in Nordic Tankers
ONE FLEET SOLUTION Combining noon reports with automated data ORKA SUMMIT September 2015 15 September 2015 1 AGENDA Introduction to Nordic Tankers Motivation for Performance Management in Nordic Tankers
EPIC Workshop 2017 SES Perspective on Electric Propulsion
 EPIC Workshop 2017 SES Perspective on Electric Propulsion PRESENTED BY Eric Kruch PRESENTED ON 24 October 2017 SES Proprietary SES Perspective on Electric Propulsion Agenda 1 Electric propulsion at SES
EPIC Workshop 2017 SES Perspective on Electric Propulsion PRESENTED BY Eric Kruch PRESENTED ON 24 October 2017 SES Proprietary SES Perspective on Electric Propulsion Agenda 1 Electric propulsion at SES
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF
 AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
PG&E s Energy Landscape. Gregg Lemler, vice president, electric transmission i-pcgrid Workshop March 28 30, 2018
 PG&E s Energy Landscape Gregg Lemler, vice president, electric transmission i-pcgrid Workshop March 28 30, 2018 Implications Drivers The energy landscape is changing Policy Changes Market Trends Business
PG&E s Energy Landscape Gregg Lemler, vice president, electric transmission i-pcgrid Workshop March 28 30, 2018 Implications Drivers The energy landscape is changing Policy Changes Market Trends Business
Robotic Rovers Aid Mars Surface Exploration
 Robotic Rovers Aid Mars Surface Exploration Dr. Antal K. Bejczy Senior Research Scientist JPL/CALTECH (retiree) Pasadena, California, USA antbej@earthlink.net Abstract The twin robotic rovers, Spirit and
Robotic Rovers Aid Mars Surface Exploration Dr. Antal K. Bejczy Senior Research Scientist JPL/CALTECH (retiree) Pasadena, California, USA antbej@earthlink.net Abstract The twin robotic rovers, Spirit and
CONNECTED PROPULSION - THE FUTURE IS NOW
 MOTOR & UMWELT 2018 ENGINE & ENVIRONMENT 2018 CONNECTED PROPULSION - THE FUTURE IS NOW Larry Nitz General Motors 9 We re at a transformative time in automotive history, but a lot of innovation is already
MOTOR & UMWELT 2018 ENGINE & ENVIRONMENT 2018 CONNECTED PROPULSION - THE FUTURE IS NOW Larry Nitz General Motors 9 We re at a transformative time in automotive history, but a lot of innovation is already
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Rocketry Projects Conducted at the University of Cincinnati
 Rocketry Projects Conducted at the University of Cincinnati 2009-2010 Grant Schaffner, Ph.D. (Advisor) Rob Charvat (Student) 17 September 2010 1 Spacecraft Design Course Objectives Students gain experience
Rocketry Projects Conducted at the University of Cincinnati 2009-2010 Grant Schaffner, Ph.D. (Advisor) Rob Charvat (Student) 17 September 2010 1 Spacecraft Design Course Objectives Students gain experience
AUTONOMOUS ROVER TECHNOLOGY FOR MARS SAMPLE RETURN
 AUTONOMOUS ROVER TECHNOLOGY FOR MARS SAMPLE RETURN Charles R. Weisbin, Guillermo Rodriguez, Paul S. Schenker, Hari Das, Samad A. Hayati, Eric T. Baumgartner, Mark Maimone, Issa A. Nesnas, Richard A. Volpe
AUTONOMOUS ROVER TECHNOLOGY FOR MARS SAMPLE RETURN Charles R. Weisbin, Guillermo Rodriguez, Paul S. Schenker, Hari Das, Samad A. Hayati, Eric T. Baumgartner, Mark Maimone, Issa A. Nesnas, Richard A. Volpe
How To Build A Solar Wind Turbine: Solar Powered Wind Turbine Plans
 How To Build A Solar Wind Turbine: Solar Powered Wind Turbine Plans If you are searching for the book How To Build a Solar Wind Turbine: Solar Powered Wind Turbine Plans in pdf form, then you've come to
How To Build A Solar Wind Turbine: Solar Powered Wind Turbine Plans If you are searching for the book How To Build a Solar Wind Turbine: Solar Powered Wind Turbine Plans in pdf form, then you've come to
Li-ion battery and super-capacitor Hybrid energy system for low temperature SmallSat applications
 Li-ion battery and super-capacitor Hybrid energy system for low temperature SmallSat applications K.B. Chin*, M.C. Smart, E.J. Brandon, G.S. Bolotin, N.K. Palmer Jet Propulsion Laboratory, California Institute
Li-ion battery and super-capacitor Hybrid energy system for low temperature SmallSat applications K.B. Chin*, M.C. Smart, E.J. Brandon, G.S. Bolotin, N.K. Palmer Jet Propulsion Laboratory, California Institute
Two Related Primary Challenges for Successful Renewed Lunar Exploration
 Two Related Primary Challenges for Successful Renewed Lunar Exploration October 10, 2017 Presented By Ron Creel Retired Apollo Lunar Roving Vehicle Team Member OUTLINE Challenge 1 Coping with Exposure
Two Related Primary Challenges for Successful Renewed Lunar Exploration October 10, 2017 Presented By Ron Creel Retired Apollo Lunar Roving Vehicle Team Member OUTLINE Challenge 1 Coping with Exposure
Good afternoon. We're going to be talking today about frontiers of imagination in space exploration
 Good afternoon. We're going to be talking today about frontiers of imagination in space exploration First, though, I want to introduce myself. My name is Loretta Hall, and I'm a space buff. I've been a
Good afternoon. We're going to be talking today about frontiers of imagination in space exploration First, though, I want to introduce myself. My name is Loretta Hall, and I'm a space buff. I've been a
Simulation of Robotic Regolith Mining for Base Construction on Mars. Eric Halbach, Vadim A. Zhmud, Aarne Halme
 Simulation of Robotic Regolith Mining for Base Construction on Mars Eric Halbach, Vadim A. Zhmud, Aarne Halme eric.halbach@aalto.fi May 17, 2013 Motivation Image: SpaceX Image: James Cameron Manned landings
Simulation of Robotic Regolith Mining for Base Construction on Mars Eric Halbach, Vadim A. Zhmud, Aarne Halme eric.halbach@aalto.fi May 17, 2013 Motivation Image: SpaceX Image: James Cameron Manned landings
Technology for the Future of Vertical Lift
 Presented to: Italian Vertical Lift Community Technology for the Future of Vertical Lift Approved for public release; distribution unlimited. Review completed by the AMRDEC Public Affairs Office 15 Nov
Presented to: Italian Vertical Lift Community Technology for the Future of Vertical Lift Approved for public release; distribution unlimited. Review completed by the AMRDEC Public Affairs Office 15 Nov
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
Microgrid solutions Delivering resilient power anywhere at any time
 Microgrid solutions Delivering resilient power anywhere at any time 2 3 Innovative and flexible solutions for today s energy challenges The global energy and grid transformation is creating multiple challenges
Microgrid solutions Delivering resilient power anywhere at any time 2 3 Innovative and flexible solutions for today s energy challenges The global energy and grid transformation is creating multiple challenges
Drive Essentials. robot. -Andy Baker
 Drive Essentials The best drive train is more important than anything else on the robot meets your strategy goals can be built with your resources rarely needs maintenance can be fixed within 4 minutes
Drive Essentials The best drive train is more important than anything else on the robot meets your strategy goals can be built with your resources rarely needs maintenance can be fixed within 4 minutes
Low and medium voltage service. Power Care Customer Support Agreements
 Low and medium voltage service Power Care Customer Support Agreements Power Care Power Care is the best, most convenient and guaranteed way of ensuring electrification system availability and reliability.
Low and medium voltage service Power Care Customer Support Agreements Power Care Power Care is the best, most convenient and guaranteed way of ensuring electrification system availability and reliability.
ORBITAL EXPRESS Space Operations Architecture Program 17 th Annual AIAA/USU Conference on Small Satellites August 12, 2003
 ORBITAL EXPRESS Space Operations Architecture Program 17 th Annual AIAA/USU Conference on Small Satellites August 12, 2003 Major James Shoemaker, USAF, Ph.D. DARPA Orbital Express Space Operations Program
ORBITAL EXPRESS Space Operations Architecture Program 17 th Annual AIAA/USU Conference on Small Satellites August 12, 2003 Major James Shoemaker, USAF, Ph.D. DARPA Orbital Express Space Operations Program