Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability
|
|
|
- Hugh Parsons
- 5 years ago
- Views:
Transcription
1 Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability 2007 David L. Akin - All rights reserved
")
2 Lunar Highlands (as imagined in 1950 s)

3 Lunar Highlands (reality)
4 Lunar Regolith Broken down from larger pieces over time Major constituents Rock fragments Mineral fragments Glassy particles Local environment torr Meteorites at >10 5 m/sec Galactic cosmic rays, solar particles Temperature range +250 F -250 F
5 Regolith Creation Process Only weathering phenomenon on the moon is micrometeoritic impact! Weathering processes Comminution: breaking rocks and minerals into smaller particles Agglutination: welding fragments together with molten glass formed by impact energy Solar wind spallation and implantation (miniscule) Fire fountaining (dormant)
6 JSC-1 Simulant Ash vented from Merriam Crater in San Francisco volcano field near Flagstaff, AZ K-Ar dated at 150,000 years old ± 30,000 Major constituents SiO 2, TiO 2, Al 2 O 3, Fe 2 O 3, FeO, MgO, CaO, Na 2 O, other <1% Represents low-ti regolith from lunar mare MLS-1 simulant (U.Minn.) preferred for simulation of highland material

7 von Karman - Gabrielli Diagram

8 Surveyor Seven mission May January 1968 (5 successful) Mass about 625 lbs Surveyor 6 performed a hop November m peak altitude, 2.5 m lateral motion

9 Lunar Roving Vehicle Flown on Apollo 15, 16, 17 Empty weight 460 lbs Payload 1080 lbs Maximum range 65 km Total 1 HP Max speed 13 kph


10 Lunakhod 1 and 2 Soviet lunar rovers 2000 lbs 3 month design lifetime Lunakhod 1 November, km in 11 months Lunakhod 2 January, km in 2 months
 Total traverse")
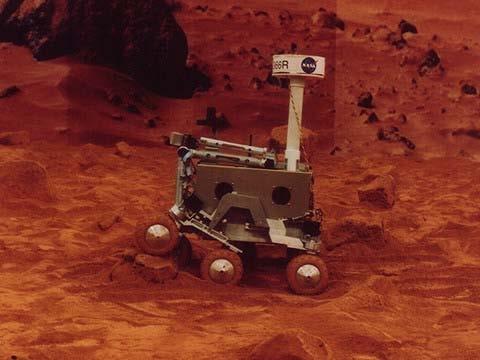
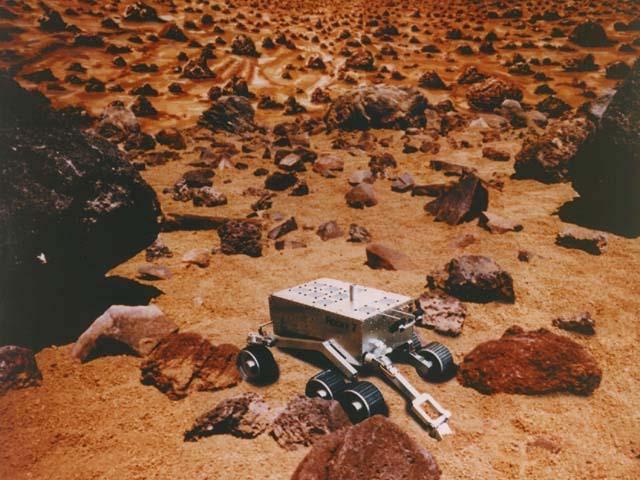
11 Mars Pathfinder Sojourner rover flown as engineering experiment 23 lbs, $25M Design life 1 week Survived for 83 sols (outlived lander vehicle) Total traverse ~100 m

12 Mars Exploration Rovers Two rovers landed on Mars in January 2004 Design lifetime 90 days, 1 km Both at 1-year mark Spirit 4030 m Opportunity 2075 m

13 Huygens Probe Titan entry January 2005 Descent imaging used to survey surface at different scales Wind motion provided horizontal traverse of surface

14 Skid-Steer Rover (ET) 14 Terramechanics Planetary Surface Robotics

15 Electric Tractor (JSC)

16 ET Suspension

17 ET in Hilly Terrain
")
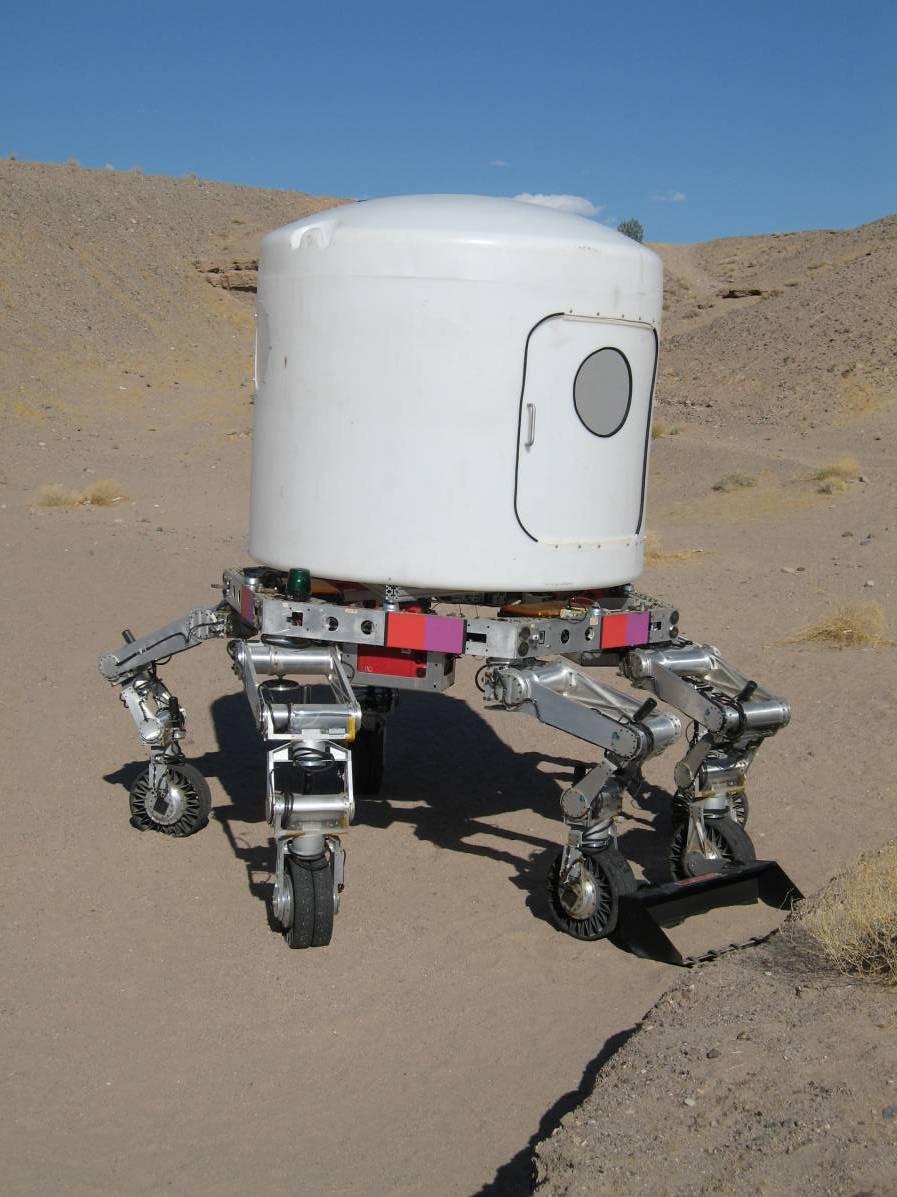
18 Nomad (CMU)

19 Nomad in Rough Terrain

20 Nomad Transforming Chassis
21 Nomad Chassis/Steering System

22 Steering Schemes

23 Nomad Steering Schemes

24 Marsokhod (in NASA Ames

25 Marsokhod Chassis
")
26 Robby (JPL)

27 Ratler (Sandia Labs)

28 Split-Body Rovers (Sanida Labs)
29 Rocky

30 Rocky 4
31 Rocky 7
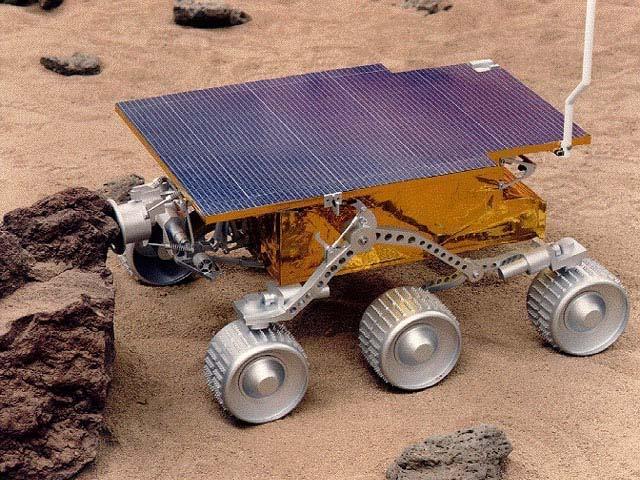
32 Sojourner
")
33 FIDO (JPL)

34 Field Trials for New Mobility Technologies
")
35 SCOUT (JSC)



36 Robonaut/Centaur (JSC)
")

37 ATHLETE (JPL)
38 Static and Dynamic Stability Envelope h = 1.75 m x t = 1.5 m x l = 1.0 m x t x l Stability Region h
39 Linear Acceleration 0-60 (sec) Accel (m/sec) Apparent G angle (Earth) Apparent G angle (Moon)
40 Linear Deceleration Stopping distance (m) Deceleration (m/sec^2) Apparent G angle (Earth) Apparent G angle (Moon)
41 Dynamic Stability Conditions θ crit,l = 29.7 deg θ crit,t = 40.6 deg m V 2 R m dv dt mg θ crit,l h mg θ crit,t
42 Effects of Slopes on Stability m V 2 R m dv dt mg mg θ crit,l θ crit,t
 Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
Name: Space Exploration PBL
 Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Landing Targets and Technical Subjects for SELENE-2
 Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, GMT
 Friday, October 30, GMT") Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Wheeled Robotic Mobility. Dimi Apostolopoulos
 Wheeled Robotic Mobility Dimi Apostolopoulos Significance of Mobility Move Position Transport Employ instruments and tools React to work loads in a controllable fashion ROBOTIC MOBILITY Dimi Apostolopoulos
Wheeled Robotic Mobility Dimi Apostolopoulos Significance of Mobility Move Position Transport Employ instruments and tools React to work loads in a controllable fashion ROBOTIC MOBILITY Dimi Apostolopoulos
Travel: Detailed Flight Plan
 DarkSide Logistics Lunar Spaceport Initiative Travel: Detailed Flight Plan The payload will be launched from Cape Canaveral Air Force Station Launch Complex 46 at 15:59:35 ET on January 25, 2010, using
DarkSide Logistics Lunar Spaceport Initiative Travel: Detailed Flight Plan The payload will be launched from Cape Canaveral Air Force Station Launch Complex 46 at 15:59:35 ET on January 25, 2010, using
Light-Lift Rocket II
 Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Lunar Robotics. Dr. Rob Ambrose, NASA JSC December Dr. Robert O. Ambrose
 Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
Phoenix Lander Implications on in situ resource utilization for robotic exploration of Mars
 Phoenix Landing Site May 2008 Phoenix Lander Implications on in situ resource utilization for robotic exploration of Mars LEAG-ICEUM-SRR (2008) Cape Canaveral, FL Robert L. Ash October 29, 2008 Aerospace
Phoenix Landing Site May 2008 Phoenix Lander Implications on in situ resource utilization for robotic exploration of Mars LEAG-ICEUM-SRR (2008) Cape Canaveral, FL Robert L. Ash October 29, 2008 Aerospace
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES
 FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
Lunar Architecture and LRO
 Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Aditya.V Mechatronics, MGIT
 Unmanned Terrain with Rocker Bogie Suspension Aditya.V Mechatronics, MGIT Abstract: A rover is a vehicle for driving over rough terrain, especially one driven by remote control over extraterrestrial terrain.
Unmanned Terrain with Rocker Bogie Suspension Aditya.V Mechatronics, MGIT Abstract: A rover is a vehicle for driving over rough terrain, especially one driven by remote control over extraterrestrial terrain.
Soviet Lunokhod 1 and 2 missions and things around
 Soviet Lunokhod 1 and 2 missions and things around Alexander Basilevsky Vernadsky Institute of Geochemistry and Analytical Chemistry Russian Academy of Sciences, Moscow, Russia and Department of Geological
Soviet Lunokhod 1 and 2 missions and things around Alexander Basilevsky Vernadsky Institute of Geochemistry and Analytical Chemistry Russian Academy of Sciences, Moscow, Russia and Department of Geological
WHAT WE WILL DISCUSS IN THIS VIDEO
 WHAT WE WILL DISCUSS IN THIS VIDEO What is Chandrayaan 2 all about? Why is it special? Have we entered the The Asian space race? Where do China, Japan and India stand? What is the importance of the moon?
WHAT WE WILL DISCUSS IN THIS VIDEO What is Chandrayaan 2 all about? Why is it special? Have we entered the The Asian space race? Where do China, Japan and India stand? What is the importance of the moon?
Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers
 Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers Kojiro Iizuka and Takashi Kubota 2 International Young Researchers Empowerment Center, Shinshu University, iizuka@shinshu-u.ac.jp 2
Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers Kojiro Iizuka and Takashi Kubota 2 International Young Researchers Empowerment Center, Shinshu University, iizuka@shinshu-u.ac.jp 2
Lunar Driving Simulator History
 1 of 20 Lunar Driving Simulator History Early NASA MSFC/Northrop MOLAB Concept. This vehicle concept evolved from the study contract NAS8-11096 in support of the early Apollo Logistic Support System studies
1 of 20 Lunar Driving Simulator History Early NASA MSFC/Northrop MOLAB Concept. This vehicle concept evolved from the study contract NAS8-11096 in support of the early Apollo Logistic Support System studies
LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE
 LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE ABSTRACT With 1 rover, 2 astronauts and 3 days, the Apollo 17 Mission covered over 30 km, setup
LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE ABSTRACT With 1 rover, 2 astronauts and 3 days, the Apollo 17 Mission covered over 30 km, setup
Lunar Missions by Year - All Countries. Mission count dropped as we transitioned from politically driven missions to science driven missions
 n Lunar Missions by Year - All Countries Key: All Mission Attempts Mission Successes Mission count dropped as we transitioned from politically driven missions to science driven missions Capability Driven
n Lunar Missions by Year - All Countries Key: All Mission Attempts Mission Successes Mission count dropped as we transitioned from politically driven missions to science driven missions Capability Driven
Nomad: A Demonstration of the Transforming Chassis E. Rollins, J. Luntz, B. Shamah, and W. Whittaker Carnegie Mellon University Abstract During the Su
 Nomad: A Demonstration of the Transforming Chassis E. Rollins, J. Luntz, B. Shamah, and W. Whittaker Carnegie Mellon University Abstract During the Summer of 1997 - Nomad - a planetary-relevant mobile
Nomad: A Demonstration of the Transforming Chassis E. Rollins, J. Luntz, B. Shamah, and W. Whittaker Carnegie Mellon University Abstract During the Summer of 1997 - Nomad - a planetary-relevant mobile
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science
 Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Mars Surface Mobility Proposal
 Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
Curiosity lands on Mars
 Curiosity lands on Mars Early Monday morning (August 6, 2012), the Mars rover named Curiosity successfully landed on the surface of Mars. The rover launched on November 26 th, 2011 and traveled for 8 ½
Curiosity lands on Mars Early Monday morning (August 6, 2012), the Mars rover named Curiosity successfully landed on the surface of Mars. The rover launched on November 26 th, 2011 and traveled for 8 ½
Case Studies on NASA Mars Rover s Mobility System
 Case Studies on NASA Mars Rover s Mobility System Shih-Liang (Sid) Wang 1 Abstract Motion simulation files based on Working Model 2D TM are developed to simulate Mars rover s mobility system. The rover's
Case Studies on NASA Mars Rover s Mobility System Shih-Liang (Sid) Wang 1 Abstract Motion simulation files based on Working Model 2D TM are developed to simulate Mars rover s mobility system. The rover's
Two Related Primary Challenges for Successful Renewed Lunar Exploration
 Two Related Primary Challenges for Successful Renewed Lunar Exploration October 10, 2017 Presented By Ron Creel Retired Apollo Lunar Roving Vehicle Team Member OUTLINE Challenge 1 Coping with Exposure
Two Related Primary Challenges for Successful Renewed Lunar Exploration October 10, 2017 Presented By Ron Creel Retired Apollo Lunar Roving Vehicle Team Member OUTLINE Challenge 1 Coping with Exposure
Long-Range Rovers for Mars Exploration and Sample Return
 2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
Challenges of Designing the MarsNEXT Network
 Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
OMOTENASHI. (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor)
") SLS EM-1 secondary payload OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) The smallest moon lander launched by the most powerful rocket in the world * Omotenashi
SLS EM-1 secondary payload OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) The smallest moon lander launched by the most powerful rocket in the world * Omotenashi
Microbots for Large-Scale Planetary Surface and Subsurface Exploration
 Microbots for Large-Scale Planetary Surface and Subsurface Exploration Steven Dubowsky, Principal Investigator Karl Iagnemma, Co-Investigator Field and Space Robotics Laboratory Massachusetts Institute
Microbots for Large-Scale Planetary Surface and Subsurface Exploration Steven Dubowsky, Principal Investigator Karl Iagnemma, Co-Investigator Field and Space Robotics Laboratory Massachusetts Institute
Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection
 Journal of Asian Electric Vehicles, Volume 7, Number 2, December 2009 Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection Koiro
Journal of Asian Electric Vehicles, Volume 7, Number 2, December 2009 Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection Koiro
Keywords: Mars rover, Flange, Deformation analysis, Stress distribution
 Applied Mechanics and Materials Submitted: 2014-05-14 ISSN: 1662-7482, Vol. 574, pp 253-258 Accepted: 2014-05-15 doi:10.4028/www.scientific.net/amm.574.253 Online: 2014-07-18 2014 Trans Tech Publications,
Applied Mechanics and Materials Submitted: 2014-05-14 ISSN: 1662-7482, Vol. 574, pp 253-258 Accepted: 2014-05-15 doi:10.4028/www.scientific.net/amm.574.253 Online: 2014-07-18 2014 Trans Tech Publications,
Canadian Lunar & Planetary Rover. Development
 Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Abstract #1756. English. French. Author(s) and Co Author(s) ispace & Team Hakuto s 2017 Lunar Mission
 and Co Author(s) ispace & Team Hakuto s 2017 Lunar Mission") 4/25/2017 CIM TPMS Abstract #1756 English ispace & Team Hakuto s 2017 Lunar Mission This presentation will introduce ispace, a lunar exploration company headquartered in Tokyo, Japan, and Team Hakuto,
4/25/2017 CIM TPMS Abstract #1756 English ispace & Team Hakuto s 2017 Lunar Mission This presentation will introduce ispace, a lunar exploration company headquartered in Tokyo, Japan, and Team Hakuto,
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity
 The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
Case Study: ParaShield
 Case Study: ParaShield Origin of ParaShield Concept ParaShield Flight Test Wind Tunnel Testing Future Applications U N I V E R S I T Y O F MARYLAND 2012 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu
Case Study: ParaShield Origin of ParaShield Concept ParaShield Flight Test Wind Tunnel Testing Future Applications U N I V E R S I T Y O F MARYLAND 2012 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu
Design and Fabrication of Rocker Bogie Mechanism using Solar Energy
 Design and Fabrication of Rocker Bogie Mechanism using Solar Energy Rajat Murambikar 1, Vinay Omase 2, Vivek Nayak 3, Karan Patil 4, Prof. Yogesh Mahulkar 5 1,2,3,4Bachelor of Engineering, Department of
Design and Fabrication of Rocker Bogie Mechanism using Solar Energy Rajat Murambikar 1, Vinay Omase 2, Vivek Nayak 3, Karan Patil 4, Prof. Yogesh Mahulkar 5 1,2,3,4Bachelor of Engineering, Department of
The Mobility System Wheel Design for NASA s Mars Science Laboratory Mission
 The Mobility System Wheel Design for NASA s Mars Science Laboratory Mission S. Haggart; J. Waydo Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA, USA 1. Abstract / Introduction
The Mobility System Wheel Design for NASA s Mars Science Laboratory Mission S. Haggart; J. Waydo Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA, USA 1. Abstract / Introduction
Traction Performance of Wheel and Track for Soft-Soil Traversal
 ICRA 10 Planetary Rovers Workshop May 3rd, 2010 Traction Performance of Wheel and Track for Soft-Soil Traversal Kazuya Yoshida, Keiji Nagatani, Junya Yusa Tohoku University, Japan Traction Performance
ICRA 10 Planetary Rovers Workshop May 3rd, 2010 Traction Performance of Wheel and Track for Soft-Soil Traversal Kazuya Yoshida, Keiji Nagatani, Junya Yusa Tohoku University, Japan Traction Performance
Coupled Aero-Structural Modelling and Optimisation of Deployable Mars Aero-Decelerators
 Coupled Aero-Structural Modelling and Optimisation of Deployable Mars Aero-Decelerators Lisa Peacocke, Paul Bruce and Matthew Santer International Planetary Probe Workshop 11-15 June 2018 Boulder, CO,
Coupled Aero-Structural Modelling and Optimisation of Deployable Mars Aero-Decelerators Lisa Peacocke, Paul Bruce and Matthew Santer International Planetary Probe Workshop 11-15 June 2018 Boulder, CO,
A New Facility for Lander Touchdown and Rover Mobility Testing at DLR
 A New Facility for Lander Touchdown and Rover Mobility Testing at DLR Lutz Richter, Antje Brucks, Lars Witte DLR Institute of Space Systems, Bremen, Germany New DLR Institute of Space Systems Systems Analysis
A New Facility for Lander Touchdown and Rover Mobility Testing at DLR Lutz Richter, Antje Brucks, Lars Witte DLR Institute of Space Systems, Bremen, Germany New DLR Institute of Space Systems Systems Analysis
From MARS To MOON. V. Giorgio Director of Italian Programs. Sorrento, October, All rights reserved, 2007, Thales Alenia Space
 From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
Industrial-and-Research Lunar Base
 Industrial-and-Research Lunar Base STRATEGY OF LUNAR BASE CREATION Phase 1 Preparatory: creation of international cooperation, investigation of the Moon by unmanned spacecraft, creation of space transport
Industrial-and-Research Lunar Base STRATEGY OF LUNAR BASE CREATION Phase 1 Preparatory: creation of international cooperation, investigation of the Moon by unmanned spacecraft, creation of space transport
Performance Evaluation of Wheeled Rover by Analysis and Test
 Performance Evaluation of Wheeled Rover by Analysis and Test Gaurav Sharma, Srividhya G., Shamrao, K. Balaji, G. Nagesh, C.D. Sridhara Abstract Rovers provide a mobile platform for exploring planetary
Performance Evaluation of Wheeled Rover by Analysis and Test Gaurav Sharma, Srividhya G., Shamrao, K. Balaji, G. Nagesh, C.D. Sridhara Abstract Rovers provide a mobile platform for exploring planetary
Ironless Core DC Motors for Aerospace
 Ironless Core DC Motors for Aerospace Market segments covered by AS/EN9100 Support equipment Space shuttle & re entry vehicles Aviation Commercial passenger aircraft Light aircraft Cabin equipment Science
Ironless Core DC Motors for Aerospace Market segments covered by AS/EN9100 Support equipment Space shuttle & re entry vehicles Aviation Commercial passenger aircraft Light aircraft Cabin equipment Science
THE HISTORY OF MARS EXPLORATION
 THE HISTORY OF MARS EXPLORATION Philippe Masson 1st Mars Express Science Conference (ESTEC, February 21-25, 2005) Mars Observers: The European Pioneers Nicolaus Copernicus: described the motion of the
THE HISTORY OF MARS EXPLORATION Philippe Masson 1st Mars Express Science Conference (ESTEC, February 21-25, 2005) Mars Observers: The European Pioneers Nicolaus Copernicus: described the motion of the
Low Power Mobility System for Micro Planetary Rover Micro5
 i-sairas 99, ESTEC, Noordwijk, The Netherlands, June 1-3 1999 Low Power Mobility System for Micro Planetary Rover Micro5 Yoji KURODA*, Koji KONDO*, Kazuaki NAKAMURA*, Yasuharu KUNII**, and Takashi KUBOTA***
i-sairas 99, ESTEC, Noordwijk, The Netherlands, June 1-3 1999 Low Power Mobility System for Micro Planetary Rover Micro5 Yoji KURODA*, Koji KONDO*, Kazuaki NAKAMURA*, Yasuharu KUNII**, and Takashi KUBOTA***
Suitability of reusability for a Lunar re-supply system
 www.dlr.de Chart 1 Suitability of reusability for a Lunar re-supply system Etienne Dumont Space Launcher Systems Analysis (SART) Institut of Space Systems, Bremen, Germany Etienne.dumont@dlr.de IAC 2016
www.dlr.de Chart 1 Suitability of reusability for a Lunar re-supply system Etienne Dumont Space Launcher Systems Analysis (SART) Institut of Space Systems, Bremen, Germany Etienne.dumont@dlr.de IAC 2016
THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS. Nagin Cox
 THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS Nagin Cox Jet Propulsion Laboratory National Air & Space Administration/California Institute of Technology Email: nagin@jpl.nasa.gov Abstract: Since
THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS Nagin Cox Jet Propulsion Laboratory National Air & Space Administration/California Institute of Technology Email: nagin@jpl.nasa.gov Abstract: Since
Lunette: A Global Network of Small Lunar Landers
 Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Resource Prospector Traverse Planning
 Resource Prospector Traverse Planning Jennifer Heldmann (NASA Ames / NASA Headquarters) Anthony Colaprete (NASA Ames Research Center) Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters)
Resource Prospector Traverse Planning Jennifer Heldmann (NASA Ames / NASA Headquarters) Anthony Colaprete (NASA Ames Research Center) Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters)
Japanese Rover Test-bed for Lunar Exploration
 Japanese Rover Test-bed for Lunar Exploration Takashi Kubota*, Yasuharu Kunii**, Yoji Kuroda***, Masatsygu Otsuki* *ISAS/JAXA, 3-1-1, Yoshinodai, Sagamihara 229-8510, JAPAN **Chuo University, 1-13-27,
Japanese Rover Test-bed for Lunar Exploration Takashi Kubota*, Yasuharu Kunii**, Yoji Kuroda***, Masatsygu Otsuki* *ISAS/JAXA, 3-1-1, Yoshinodai, Sagamihara 229-8510, JAPAN **Chuo University, 1-13-27,
Massachusetts Space Grant Consortium
 Massachusetts Space Grant Consortium Distinguished Lecturer Series NASA Administrator Dr. Michael Griffin NASA s Exploration Architecture March 8, 2006 Why We Explore Human curiosity Stimulates our imagination
Massachusetts Space Grant Consortium Distinguished Lecturer Series NASA Administrator Dr. Michael Griffin NASA s Exploration Architecture March 8, 2006 Why We Explore Human curiosity Stimulates our imagination
Analysis of Power Storage Media for the Exploration of the Moon
 Analysis of Power Storage Media for the Exploration of the Moon Michael Loweth, Rachel Buckle ICEUM 9 22-26 th October 2007 ABSL Space Products 2005 2007 Servicing USA and the ROW UNITED KINGDOM Culham
Analysis of Power Storage Media for the Exploration of the Moon Michael Loweth, Rachel Buckle ICEUM 9 22-26 th October 2007 ABSL Space Products 2005 2007 Servicing USA and the ROW UNITED KINGDOM Culham
Exploration Architecture Update
 Exploration Architecture Update Doug Cooke Deputy Associate Administrator Exploration Systems Mission Directorate John Connolly Vehicle Engineering and Integration Lunar Lander Project Office March 14,
Exploration Architecture Update Doug Cooke Deputy Associate Administrator Exploration Systems Mission Directorate John Connolly Vehicle Engineering and Integration Lunar Lander Project Office March 14,
Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce
 Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce Dr. Allison Zuniga, Mark Turner and Dr. Dan Rasky NASA Ames Research Center Space Portal Office Mike
Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce Dr. Allison Zuniga, Mark Turner and Dr. Dan Rasky NASA Ames Research Center Space Portal Office Mike
Study on a Suspension of a Planetary Exploration Rover to Improve Driving Performance During Overcoming Obstacles
 Technical Paper J. Astron. Space Sci. 29(4), 381-387 (2012) http://dx.doi.org/10.5140/jass.2012.29.4.381 Study on a Suspension of a Planetary Exploration Rover to Improve Driving Performance During Overcoming
Technical Paper J. Astron. Space Sci. 29(4), 381-387 (2012) http://dx.doi.org/10.5140/jass.2012.29.4.381 Study on a Suspension of a Planetary Exploration Rover to Improve Driving Performance During Overcoming
350 International Atlas of Lunar Exploration
 :UP/3-PAGINATION/IAW-PROOFS/3B2/978«52181«5(M.3D 3 5 0 [7428] 19.8.20073:28PM 350 International Atlas of Lunar Exploration 8 January 1973: Luna 21 and Lunokhod 2 (Soviet Union) The 4850 kg Luna 21 spacecraft
:UP/3-PAGINATION/IAW-PROOFS/3B2/978«52181«5(M.3D 3 5 0 [7428] 19.8.20073:28PM 350 International Atlas of Lunar Exploration 8 January 1973: Luna 21 and Lunokhod 2 (Soviet Union) The 4850 kg Luna 21 spacecraft
NEXT Exploration Science and Technology Mission. Relevance for Lunar Exploration
 NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
Lunar Science and Infrastructure with the Future Lunar Lander
 ICEUM9 Sorrento Lunar Science and Infrastructure with the Future Lunar Lander Session 9: Next steps for Robotic Landers, Rovers and Outposts ICEUM9 Sorrento, Oct. 26, 2007 Hansjürgen Günther 26/10/2007
ICEUM9 Sorrento Lunar Science and Infrastructure with the Future Lunar Lander Session 9: Next steps for Robotic Landers, Rovers and Outposts ICEUM9 Sorrento, Oct. 26, 2007 Hansjürgen Günther 26/10/2007
lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow
 lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow John Connolly Lunar Lander Project Office 1 Components of Program Constellation Earth Departure Stage Ares V - Heavy
lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow John Connolly Lunar Lander Project Office 1 Components of Program Constellation Earth Departure Stage Ares V - Heavy
CHANGING ENTRY, DESCENT, AND LANDING PARADIGMS FOR HUMAN MARS LANDER
 National Aeronautics and Space Administration CHANGING ENTRY, DESCENT, AND LANDING PARADIGMS FOR HUMAN MARS LANDER Alicia Dwyer Cianciolo NASA Langley Research Center 2018 International Planetary Probe
National Aeronautics and Space Administration CHANGING ENTRY, DESCENT, AND LANDING PARADIGMS FOR HUMAN MARS LANDER Alicia Dwyer Cianciolo NASA Langley Research Center 2018 International Planetary Probe
Adrestia. A mission for humanity, designed in Delft. Challenge the future
 Adrestia A mission for humanity, designed in Delft 1 Adrestia Vision Statement: To inspire humanity by taking the next step towards setting a footprint on Mars Mission Statement Our goal is to design an
Adrestia A mission for humanity, designed in Delft 1 Adrestia Vision Statement: To inspire humanity by taking the next step towards setting a footprint on Mars Mission Statement Our goal is to design an
LOW-COST TANKAGE PROVIDED FOR RECENT DISCOVERY MISSIONS
 Page 1 LOW-COST TANKAGE PROVIDED FOR RECENT DISCOVERY MISSIONS Walter H. Tam, Michael J. Debreceni, Charles D. Nye, and Michael S. Hersh Pressure Systems, Inc. ABSTRACT Several recent and up-coming planetary
Page 1 LOW-COST TANKAGE PROVIDED FOR RECENT DISCOVERY MISSIONS Walter H. Tam, Michael J. Debreceni, Charles D. Nye, and Michael S. Hersh Pressure Systems, Inc. ABSTRACT Several recent and up-coming planetary
Mobile Payload Element (MPE)
") Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
An Overview of CSA s s Space Robotics Activities
 An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
Historical Perspectives: Evolution of Recent Mars EDL Systems Development. 6th International Planetary Probe Workshop June 2008 Erisa K Hines
 Historical Perspectives: Evolution of Recent Mars EDL Systems Development 6th International Planetary Probe Workshop 23-27 June 2008 Erisa K Hines Overview An examination of the EDL system engineering
Historical Perspectives: Evolution of Recent Mars EDL Systems Development 6th International Planetary Probe Workshop 23-27 June 2008 Erisa K Hines Overview An examination of the EDL system engineering
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE
 INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
VACCO ChEMS Micro Propulsion Systems Advances and Experience in CubeSat Propulsion System Technologies
 VACCO ChEMS Micro Propulsion Systems Advances and Experience in CubeSat Propulsion System Technologies May 1 st, 2018 VACCO Proprietary Data Shall Not Be Disclosed Without Written Permission of VACCO VACCO
VACCO ChEMS Micro Propulsion Systems Advances and Experience in CubeSat Propulsion System Technologies May 1 st, 2018 VACCO Proprietary Data Shall Not Be Disclosed Without Written Permission of VACCO VACCO
Development of Legged, Wheeled, and Hybrid Rover Mobility Models to Facilitate Planetary Surface Exploration Mission Analysis
 Development of Legged, Wheeled, and Hybrid Rover Mobility Models to Facilitate Planetary Surface Exploration Mission Analysis by Scott H. McCloskey B.S., Aerospace Engineering University of Arizona, 2005
Development of Legged, Wheeled, and Hybrid Rover Mobility Models to Facilitate Planetary Surface Exploration Mission Analysis by Scott H. McCloskey B.S., Aerospace Engineering University of Arizona, 2005
On Orbit Refueling: Supporting a Robust Cislunar Space Economy
 On Orbit Refueling: Supporting a Robust Cislunar Space Economy Courtesy of NASA 3 April 2017 Copyright 2014 United Launch Alliance, LLC. All Rights Reserved. Atlas V Launch History ULA s Vision: Unleashing
On Orbit Refueling: Supporting a Robust Cislunar Space Economy Courtesy of NASA 3 April 2017 Copyright 2014 United Launch Alliance, LLC. All Rights Reserved. Atlas V Launch History ULA s Vision: Unleashing
Autonomous Sample Acquisition for the ExoMars Rover
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Autonomous Sample Acquisition for
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Autonomous Sample Acquisition for
DYNAMIC SIMULATION OF MARS-03 ENTRY, DESCENT AND LANDING SYSTEM
 DYNAMIC SIMULATION OF MARS-03 ENTRY, DESCENT AND LANDING SYSTEM Chia-Yen Peng and Walter Tsuha Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive Pasadena, CA 91109 ABSTRACT.
DYNAMIC SIMULATION OF MARS-03 ENTRY, DESCENT AND LANDING SYSTEM Chia-Yen Peng and Walter Tsuha Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive Pasadena, CA 91109 ABSTRACT.
RIMRES: A project summary
 RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
ORYX 2.0: Joseph L. Amato Jon J. Anderson Thomas J. Carlone. Michael E. Fagan
 ORYX 2.0: A Planetary Exploration Mobility Platform A Major Qualifying Project Report submitted to the Faculty of WORCESTER POLYTECHNIC INSTITUTE in partial fulfilment of the requirements for the Degree
ORYX 2.0: A Planetary Exploration Mobility Platform A Major Qualifying Project Report submitted to the Faculty of WORCESTER POLYTECHNIC INSTITUTE in partial fulfilment of the requirements for the Degree
Some Thoughts on Simulations in Terramechanics
 Some Thoughts on Simulations in Terramechanics J.Y. Wong Professor Emeritus and Distinguished Research Professor Carleton University and Vehicle Systems Development Corporation Ottawa, Canada Copyright
Some Thoughts on Simulations in Terramechanics J.Y. Wong Professor Emeritus and Distinguished Research Professor Carleton University and Vehicle Systems Development Corporation Ottawa, Canada Copyright
MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region
 MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region David Willson (david.willson@au.tenovagroup.com) and Jonathan D. A. Clarke (jon.clarke@bigpond.com), Mars Society Australia The centrepiece
MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region David Willson (david.willson@au.tenovagroup.com) and Jonathan D. A. Clarke (jon.clarke@bigpond.com), Mars Society Australia The centrepiece
Planetary Surface Transportation and Site Development
 Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
Space Robotics Planetary Exploration - a DLR Perspective
 Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Abstract #1739. English. French. Author(s) and Co Author(s) Mining the Moon with ispace, a Lunar Exploration Company
 and Co Author(s) Mining the Moon with ispace, a Lunar Exploration Company") 4/25/2017 CIM TPMS Abstract #1739 English Mining the Moon with ispace, a Lunar Exploration Company This presentation will introduce ispace, a lunar exploration company headquartered in Tokyo, Japan, with
4/25/2017 CIM TPMS Abstract #1739 English Mining the Moon with ispace, a Lunar Exploration Company This presentation will introduce ispace, a lunar exploration company headquartered in Tokyo, Japan, with
Four-Wheel Rover Performance Analysis at Lunar Analog Test
 Four-Wheel Rover Performance Analysis at Lunar Analog Test Nathan Britton, John Walker, Kazuya Yoshida, Toshiro Shimuzu, Tommaso Paniccia, and Kei Nakata Abstract A high fidelity field test of a four-wheeled
Four-Wheel Rover Performance Analysis at Lunar Analog Test Nathan Britton, John Walker, Kazuya Yoshida, Toshiro Shimuzu, Tommaso Paniccia, and Kei Nakata Abstract A high fidelity field test of a four-wheeled
ReachMars 2024 A Candidate Large-Scale Technology Demonstration Mission as a Precursor to Human Mars Exploration
 ReachMars 2024 A Candidate Large-Scale Technology Demonstration Mission as a Precursor to Human Mars Exploration 1 October 2014 Toronto, Canada Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
ReachMars 2024 A Candidate Large-Scale Technology Demonstration Mission as a Precursor to Human Mars Exploration 1 October 2014 Toronto, Canada Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
LUNAR WHEEL TEAM TEAM: ADAM ANDERSON DAN BARRET RICHARD FREDRICKSON KRISTINA LYNN RAMOS ERIC SOLIS. ADVISORS: Dr. COLIN BRITCHER Dr.
 LUNAR WHEEL TEAM TEAM: ADAM ANDERSON DAN BARRET RICHARD FREDRICKSON KRISTINA LYNN RAMOS ERIC SOLIS ADVISORS: Dr. COLIN BRITCHER Dr. SEBASTIAN BAWAB OBJECTIVE design a wheel that would be resistant to the
LUNAR WHEEL TEAM TEAM: ADAM ANDERSON DAN BARRET RICHARD FREDRICKSON KRISTINA LYNN RAMOS ERIC SOLIS ADVISORS: Dr. COLIN BRITCHER Dr. SEBASTIAN BAWAB OBJECTIVE design a wheel that would be resistant to the
THE SIMULATION OF ONE SIDE OF TETRAHEDRON AIRBAGS IMPACT ATTENUATION SYSTEM
 THE SIMULATION OF ONE SIDE OF TETRAHEDRON AIRBAGS IMPACT ATTENUATION SYSTEM Zhuo Wu (1) (1) Beijing Institution of Space Mechanics and Electrics, PB-9201-3, Beijing, China, Email:wuzhuo82@gmail.com ABSTRACT
THE SIMULATION OF ONE SIDE OF TETRAHEDRON AIRBAGS IMPACT ATTENUATION SYSTEM Zhuo Wu (1) (1) Beijing Institution of Space Mechanics and Electrics, PB-9201-3, Beijing, China, Email:wuzhuo82@gmail.com ABSTRACT
A MOBILITY CONCEPT FOR MARTIAN EXPLORATION Nicholas C. Costes 1, F. ASCE and Stein Sture 2
 (INCOMPLETE--Scanned Text, missing figures) A MOBILITY CONCEPT FOR MARTIAN EXPLORATION Nicholas C. Costes 1, F. ASCE and Stein Sture 2 ABSTRACT Soil mechanics and geological investigations on Mars or the
(INCOMPLETE--Scanned Text, missing figures) A MOBILITY CONCEPT FOR MARTIAN EXPLORATION Nicholas C. Costes 1, F. ASCE and Stein Sture 2 ABSTRACT Soil mechanics and geological investigations on Mars or the
Next Steps in Human Exploration: Cislunar Systems and Architectures
 Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
On the feasibility of a fast track return to Mars
 On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
Systematic Configuration of Robotic Locomotion
 Systematic Configuration of Robotic Locomotion Dimitrios Apostolopoulos CMU-RI-TR-96-3 The Robotics Institute Carnegie Mellon University Pittsburgh, Pennsylvania 15213 July 26, 1996 1996 Dimitrios Apostolopoulos
Systematic Configuration of Robotic Locomotion Dimitrios Apostolopoulos CMU-RI-TR-96-3 The Robotics Institute Carnegie Mellon University Pittsburgh, Pennsylvania 15213 July 26, 1996 1996 Dimitrios Apostolopoulos
Deployment and Flight Test of Inflatable Membrane Aeroshell using Large Scientific Balloon
 1 Deployment and Flight Test of Inflatable Membrane Aeroshell using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori Nagata, Masashi Koyama (The
1 Deployment and Flight Test of Inflatable Membrane Aeroshell using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori Nagata, Masashi Koyama (The
Design and Optimization of a Mars Rover s Rocker-Bogie Mechanism
 IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 14, Issue 5 Ver. III (Sep. - Oct. 2017), PP 74-79 www.iosrjournals.org Design and Optimization of
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 14, Issue 5 Ver. III (Sep. - Oct. 2017), PP 74-79 www.iosrjournals.org Design and Optimization of
Robots to Support a Human Mars Mission
 Robots to Support a Human Mars Mission 1 W. Naumann, P. Hofmann, A. v. Richter Kayser-Threde GmbH Wolfratshauser Str. 48, D-81379 München email: andreas.von.richter@kayser-threde.com 7th Workshop ASTRA
Robots to Support a Human Mars Mission 1 W. Naumann, P. Hofmann, A. v. Richter Kayser-Threde GmbH Wolfratshauser Str. 48, D-81379 München email: andreas.von.richter@kayser-threde.com 7th Workshop ASTRA
Robots from Junk. Vocabulary autonomous, center of mass, lander, robotics, rover
 Robots from Junk Teacher Background The Pathfinder rover, Sojourner, was once called the "Microrover Flight Experiment." It was designed to test the design and performance of rovers, as well as to do some
Robots from Junk Teacher Background The Pathfinder rover, Sojourner, was once called the "Microrover Flight Experiment." It was designed to test the design and performance of rovers, as well as to do some
A LEO Propellant Depot System Concept for Outgoing Exploration
 A LEO Propellant Depot System Concept for Outgoing Exploration Dallas Bienhoff The Boeing Company 703-414-6139 NSS ISDC Dallas, Texas May 25-28, 2007 First, There was the Vision... Page 1 Then, the ESAS
A LEO Propellant Depot System Concept for Outgoing Exploration Dallas Bienhoff The Boeing Company 703-414-6139 NSS ISDC Dallas, Texas May 25-28, 2007 First, There was the Vision... Page 1 Then, the ESAS
Subsonic Parachutes for Future Mars Missions
 Subsonic Parachutes for Future Mars Missions John C. Underwood, Arrun Saunders, Steven B. Rogers, J. Stephen Lingard Vorticity Ltd Lionel Marraffa, Luca Ferracina European Space Agency 1 Mars Parachutes
Subsonic Parachutes for Future Mars Missions John C. Underwood, Arrun Saunders, Steven B. Rogers, J. Stephen Lingard Vorticity Ltd Lionel Marraffa, Luca Ferracina European Space Agency 1 Mars Parachutes
Design of Mobility System for Ground Model of Planetary Exploration Rover
 Technical Paper J. Astron. Space Sci. 29(4), 413-422 (2012) Design of Mobility System for Ground Model of Planetary Exploration Rover Younkyu Kim 1, Wesub Eom 1, Joo-Hee Lee 1, 2, and Eun-Sup Sim 1 1 Aerospace
Technical Paper J. Astron. Space Sci. 29(4), 413-422 (2012) Design of Mobility System for Ground Model of Planetary Exploration Rover Younkyu Kim 1, Wesub Eom 1, Joo-Hee Lee 1, 2, and Eun-Sup Sim 1 1 Aerospace
The European Lunar Lander Mission
 The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
ASTRIUM. Lunar Lander Concept for LIFE. Hansjürgen Günther TOB 11. Bremen, 23/
 Lunar Lander Concept for LIFE Hansjürgen Günther TOB 11 Bremen, 23/24.11.2006 This document is the property of EADS SPACE. It shall not be communicated to third parties without prior written agreement.its
Lunar Lander Concept for LIFE Hansjürgen Günther TOB 11 Bremen, 23/24.11.2006 This document is the property of EADS SPACE. It shall not be communicated to third parties without prior written agreement.its
European Lunar Lander: System Engineering Approach
 human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
LUNAR INDUSTRIAL RESEARCH BASE. Yuzhnoye SDO proprietary
 LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
EVALUATION OF INFLUENCE OF WHEEL SURFACE SHAPES ON TRACTIVE EFFICIENCIES OF PLANETARY ROVERS IN VARIOUS SOIL ENVIRONMENTS
 EVALUATION OF INFLUENCE OF WHEEL SURFACE SHAPES ON TRACTIVE EFFICIENCIES OF PLANETARY ROVERS IN VARIOUS SOIL ENVIRONMENTS Masataku Sutoh, Kenji Nagaoka, Keiji Nagatani, and Kazuya Yoshida Department of
EVALUATION OF INFLUENCE OF WHEEL SURFACE SHAPES ON TRACTIVE EFFICIENCIES OF PLANETARY ROVERS IN VARIOUS SOIL ENVIRONMENTS Masataku Sutoh, Kenji Nagaoka, Keiji Nagatani, and Kazuya Yoshida Department of
Unit 1 Introduction to VEX and Robotics
 Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and
Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and