Resource Prospector Traverse Planning
|
|
|
- Geraldine Marshall
- 5 years ago
- Views:
Transcription
 Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters) Andrew McGovern (JHU / Applied Physics Lab)")
 N. Otten (Carnegie Mellon University) H. Jones (Carnegie Mellon University) D.")
1 Resource Prospector Traverse Planning Jennifer Heldmann (NASA Ames / NASA Headquarters) Anthony Colaprete (NASA Ames Research Center) Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters) Andrew McGovern (JHU / Applied Physics Lab) Ross Beyer (NASA Ames Research Center / SETI Institute) David Lees (NASA Ames Research Center) Matthew Deans (NASA Ames Research Center) N. Otten (Carnegie Mellon University) H. Jones (Carnegie Mellon University) D. Wettergreen (Carnegie Mellon University)


2 Lunar Site Selection Depth to Stable Ice (m) LCROSS South pole Depth to ice, m

3 Lunar Site Selection Maximum Days of Sunlight Using LOLA DEM LCROSS South pole
4 Lunar Site Selection Landing Site Sweet Spot Subsurface volatiles Direct to Earth (DTE) comm Traversable terrain Sun illumination
5 Lunar Site Selection Combined Site Analysis Mission duration 2-7 days of expected sunlight. Due to the limited operational time, science operations must be near real time. Shallow Frost Line Site: A B C <0.1 m <0.2 m <0.1 m Slopes <10 <15 <10 Neutron Depletion 4.5 cps 4.7 cps 4.9 cps Temporary Sun* 4 days 2-4 days 5-7 d Comm Line of Sight* 8 days 17 days 17 days * may not coincide Requires immediate situational awareness, data analysis and decision support tools. Site selection affects concept of operations.
6 Science Concept of Operations Select Science Positions Front Room Real-Time Science: Direct comm with Rover Driver to recommend RT science-based rover operations decisions Science Lead: Overall science management & assurance Science Operations Center (SOC) Includes Strategic and Tactical planning roles. SciCom: Direct comm between Science Backroom to Front Room Traverse Planning: Update rover traverse plans based on RT science data NIRVSS, NS, Camera, LOVEN Sci data positions: RT monitoring of data, ops recommendations based on datastream

 locations PSR")
7 Traverse Plan Data/Model Inputs The traverse plan includes the following inputs: Solar illumination as a function of time Direct to Earth (DTE) communications coverage as a function of time Terrain slopes Camera imagery PSR (Permanently Shadowed Region) locations PSR Map Slopes DTE

")





8 Notional Study Site: Haworth Crater a) LRO LOLA elevation Mission Study Site LRO LEND Frost temp depth (cm) LP neutron counts # days sun/month Haworth M3 water LRO LOLA slopes
9 Mission Planning Assumptions At/After landing, while still on lander: NSS and NIRVSS calibrated on lander Drill/OVEN/LAVA checked-out Localization from lander: Identified landing site in operating area map Any immediate (tactical) updates to traverse plan Once on ground: 48 hours of roving/prospecting to understand systems and calibrate thresholds If NSS or NIRVSS is on we can accomplish the L1 requirements while doing this Pursue Full Success goals, in priority order: 1. 1 st Shallow subsurface assay (sunlit) 2. 1 st Sample acquisition and processing (sunlit) 3. Prospect to reach 1000 meter baseline 4. 2 nd Shallow subsurface assay (sunlit) 5. 2 nd Sample acquisition and processing (sunlit) 6. Prospect to selected PSR 7. Prospect in PSR 8. 3 nd Shallow subsurface assay (shadow) 9. 3 nd Sample acquisition and processing (shadow) 10. Identification of location to sample material for ROE 11. Rove to, sample and perform ROE demo
10 ConOps Assumptions Rover speed is kept constant at 0.02 m/sec. This represents a conservative traverse plan since nominally the rover speed could be increased after 48 hours of roving. A 15 minute halt is included before entering a shadowed region for decision making purposes. The first entry into shadow is a toe-dip (enter shadow, return to sunlight, assess, then reenter shadow for AIM and sample acquisition). Battery recharge after entering shadow is while rover is halted for twice the length of time the rover was in shadow. Rover will operate in areas of sunlight (illumination maps) unless specifically entering a region of shadow / PSR for science purposes. Plan will aim to maintain DTE (note only not possible when entering large PSRs). Plan will aim to traverse low slope regions (below 10-15, note this plan is below 10 slope).
11 Science Activities
12 Exploration Ground Data Systems (xgds) xgds (Exploration Ground Data Systems) software is used to create traverse plans.
13 Haworth Landing Site Landing site is chosen in a region of low slope and in sunlight. Also chosen in an area that will enable sunlit operations to achieve mission success criteria.

14 Traverse Plan Minimum Success (100 m 1 hr 23 min. 1 st AIM and assay (sun) 9 hr 19 min.

15 Traverse Plan 1 km roving distance achieved at 20 hr 23 min. 2 nd AIM & assay (sun) complete at 33 hr 53 min.

 can be counted towards drive time, so total rover stop")
16 Traverse Plan 2 day driving objective met at 61 hr 05 min in xgds. Note this represents 48 hours of roving/prospecting (13 hours are when rover is conducting AIM/Assay at waypoints 3 and 5. Technically AIM (30 mins each) can be counted towards drive time, so total rover stop time until this point is 12 hours 2 day driving objective met at 60 hr).
 WP 11: Re-enter PSR, AIM, assay. WP 12: Exit PSR, conduct ROE, full success. WP 8 @ 68 hr 50 min.")
17 Traverse Plan Explore first PSR. Choose small PSR on order of 20 m diameter. WP 8: Stop at rim to assess (15 min halt). WP 9: Entered PSR, PSR midpoint. WP 10: Egress PSR, recharge batteries, decision making halt (15 mins) WP 11: Re-enter PSR, AIM, assay. WP 12: Exit PSR, conduct ROE, full success. WP 68 hr 50 min. WP 95 hr 22 min.
 towards large PSR.")
 to achieve")
18 Traverse Plan Continue traverse path from small PSR (previously explored) towards large PSR. Follow route to avoid topography (higher slopes). Conduct sunlit augers along the way (WPs 13, 14, 15, 16) to achieve stretch goals. Previously explored small PSR Large PSR of interest

19 Traverse Plan WP 18 is the shadow edge for this location and time. Note the edge of shadow is ~85 m away from the edge of the actual PSR. Include 15 min halt for decision making at WP 18. Enter PSR and at WP 19 perform AIM and sample acquisition. Egress PSR at End location. Note this site is still illuminated when DTE is lost. Plan ends at 140 hr 19 min.
20 Lessons Learned for Haworth 1/2 Landing site is critical. This plan lands at edge of shadow and traverses to follow the sunlight. Sites outside of this region experience significant periods of shadow during this time period and thus are not suitable for an RP traverse. Note the most interesting areas with the highest density of PSRs occur in regions where shadow prohibits rover traverses so must find the sweet spot between presence of PSRs and illumination. Illumination conditions change significantly on timescales of hours and days. Illumination drives the general traverse plan location (10s to 100s of km scale) and also affects tactical traverse plan decisions (<10 m scale). Permanent shadow is not the same as shadow. Especially near large PSRs, the rover will often enter shadow before entering the PSR. Must be aware of the time-dependent illumination conditions.
21 Lessons Learned for Haworth 2/2 Because non-psr shadow often surrounds PSR regions (~ m of shadow prior to entering the large PSR in this traverse plan), it takes a significant amount of time to traverse into the PSR, back to the light, and recharge batteries. Therefore, the first PSR visited is a small PSR (several 10s m diameter), which allows for faster access to the PSR of interest and requires less driving distance in shadow to access the PSR. DTE does not change significantly over the ~6 days of the mission for this site. DTE exists in most locations and only at the very end (final hours) does DTE disappear DTE does not exist is most large PSRs at any time, though, so traveling into a large PSR results in comm loss. End location can be strategically chosen to maximize time in sunlight. This plan ends in a location which is still in sunlight when DTE is lost. Increasing the effective rover traverse speed allows for additional exploration and science. Increasing the rover speed to 0.10 m/s after the 48 hour roving threshold is reached results in 25 additional mission hours which would allow additional exploration of the sea of PSRs near the planned End location.
22 Heldmann, J.L., Colaprete, A.C., Elphic, R., Bussey, B., McGovern, A., Beyer, R., Lees, D., and M. Deans. Site selection and traverse planning to support a lunar polar rover mission: A case study at Haworth Crater, submitted, Summary a) Haworth Crater Case Study a) Demonstrates RP mission closes and can be executed at Haworth Crater near lunar south pole Identifies need for advanced traverse planning tools

23 Heldmann, J.L., Colaprete, A.C., Elphic, R., Bussey, B., McGovern, A., Beyer, R., Lees, D., and M. Deans. Site selection and traverse planning to support a lunar polar rover mission: A case study at Haworth Crater, submitted, Nobile Context Is a longer duration mission possible?

24 Heldmann, J.L., Colaprete, A.C., Elphic, R., Bussey, B., McGovern, A., Beyer, R., Lees, D., and M. Deans. Site selection and traverse planning to support a lunar polar rover mission: A case study at Haworth Crater, submitted, Nobile-North Ridge Landing Sites These landing sites generally allow of significant solar illumination Consider as starting points for traverse Large PSR Permanent shadows shaded in grey Plains : Shallow ice-stable temps Nobile A: o S, o E Nobile B: o S, o E Nobile C: o S, o E For now just consider Nobile B Start: General plan is to get to Plains and prospect into one of several large PSRs Possibly skirt along ridge lines surrounding plains and Large PSR and conduct sorties into plains through several possible entry points Next several slides gives an example of a sortie and the activities planned for each sortie No PSR sortie is exampled, but could be after review of the first few steps
25 Heldmann, J.L., Colaprete, A.C., Elphic, R., Bussey, B., McGovern, A., Beyer, R., Lees, D., and M. Deans. Site selection and traverse planning to support a lunar polar rover mission: A case study at Haworth Crater, submitted, Notional Traverse Planning: Nobile-North Terrain Larger PSR Ridge line that may be traversable Plains : Shallow ice-stable temps
26 Heldmann, J.L., Colaprete, A.C., Elphic, R., Bussey, B., McGovern, A., Beyer, R., Lees, D., and M. Deans. Site selection and traverse planning to support a lunar polar rover mission: A case study at Haworth Crater, submitted, Notional Traverse Planning: Nobile-North Slopes Slopes (10 meter baseline) in North Nobile Region Assume start at Nobile B, 6 hours of activities around (within 100 meters) of landing site Traverse <15deg Drilling <5 deg Larger PSR Ridge line that may be traversable 1. Landing Site Activities (6 hours: Includes driving 100 meters and conducting a 1 hour AIM)
27 Heldmann, J.L., Colaprete, A.C., Elphic, R., Bussey, B., McGovern, A., Beyer, R., Lees, D., and M. Deans. Site selection and traverse planning to support a lunar polar rover mission: A case study at Haworth Crater, submitted, Notional Traverse Planning: Nobile-North Slopes Slopes (10 meter baseline) in North Nobile Region Assume start at Nobile B, 6 hours of activities around (within 100 meters) of landing site Traverse <15deg Drilling <5 deg Larger PSR Ridge line that may be traversable 1. Landing Site Activities (6 hours: Includes driving 100 meters and conducting a 1 hour AIM)
28 Heldmann, J.L., Colaprete, A.C., Elphic, R., Bussey, B., McGovern, A., Beyer, R., Lees, D., and M. Deans. Site selection and traverse planning to support a lunar polar rover mission: A case study at Haworth Crater, submitted, Notional Traverse Planning: Nobile-North Slopes Plan showing possible ridge run (solid yellow curve) and entry points from ridge to the plains Possible Entry Points 2. Traverse to Plains need to arrive at location(s) such that steps 3. thru 5. can be accomplished (next slides) Possible Entry Points
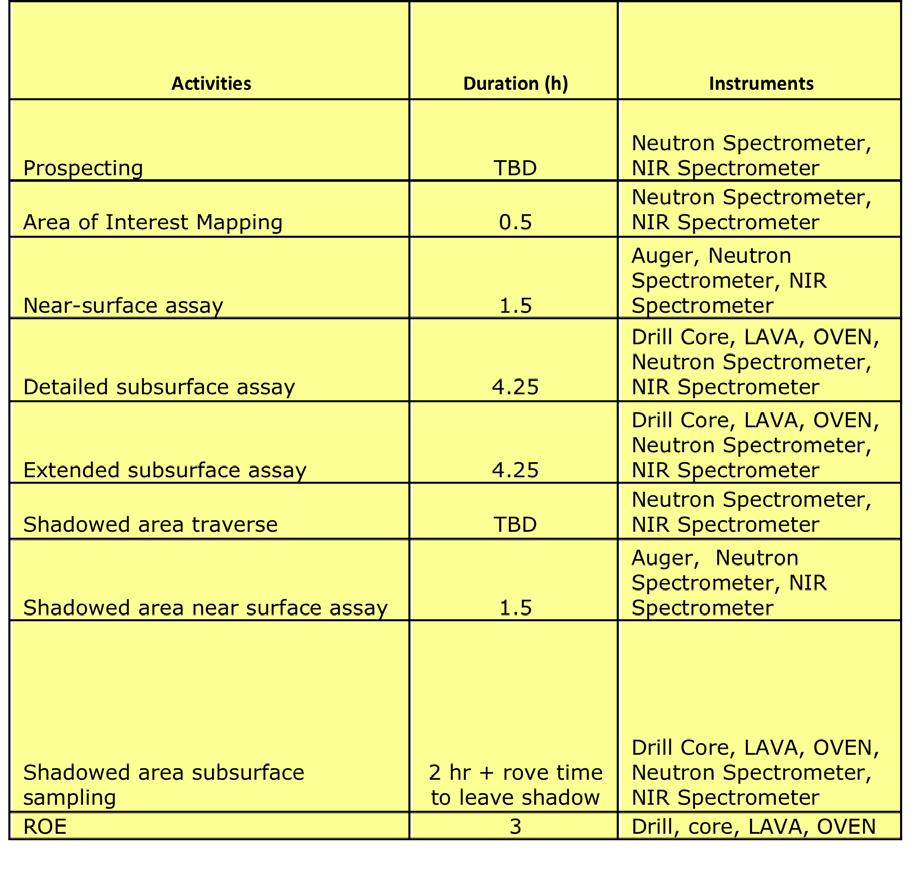
29 Heldmann, J.L., Colaprete, A.C., Elphic, R., Bussey, B., McGovern, A., Beyer, R., Lees, D., and M. Deans. Site selection and traverse planning to support a lunar polar rover mission: A case study at Haworth Crater, submitted, Notional Traverse Planning: Nobile-North Slopes Assuming we take the first entry we proceed to plains and conduct an AIM (0.5 hrs) NSA (1.5 hrs) 3. AIM #1 (0.5 hours) + NSA (1.5 hour) 2. Enter into plains at first opportunity
30 Heldmann, J.L., Colaprete, A.C., Elphic, R., Bussey, B., McGovern, A., Beyer, R., Lees, D., and M. Deans. Site selection and traverse planning to support a lunar polar rover mission: A case study at Haworth Crater, submitted, Notional Traverse Planning: Nobile-North Slopes After first AIM and NSA we proceed to next Area of Interest (here picked to be toward larger PSR) and conduct another AIM and NSA Capture sample (0.5 hr) for VA in sun rich area (next slide) 5. AIM #2 (2 hours) + NSA (1 hour) 4. Traverse to next Area of Interest in Plains (if possible)
31 Heldmann, J.L., Colaprete, A.C., Elphic, R., Bussey, B., McGovern, A., Beyer, R., Lees, D., and M. Deans. Site selection and traverse planning to support a lunar polar rover mission: A case study at Haworth Crater, submitted, Notional Traverse Planning: Nobile-North Slopes Retreat to sun & comm rich area for VA analysis VA duration is 4.5 hrs. 7. VA (4.5 hrs) Move to next entry opportunity 6. Retreat to Sun

32 Heldmann, J.L., Colaprete, A.C., Elphic, R., Bussey, B., McGovern, A., Beyer, R., Lees, D., and M. Deans. Site selection and traverse planning to support a lunar polar rover mission: A case study at Haworth Crater, submitted, Notional Traverse Planning: Nobile-North Terrain Larger PSR Ridge line that may be traversable Example of 40-day traverse solution Plains : Shallow ice-stable temps

33 Heldmann, J.L., Colaprete, A.C., Elphic, R., Bussey, B., McGovern, A., Beyer, R., Lees, D., and M. Deans. Site selection and traverse planning to support a lunar polar rover mission: A case study at Haworth Crater, submitted, Notional Traverse Planning: Nobile-North Slopes Example solution that used sun and comm constraints, but not slopes Example of a 40 day traverse with 2 sorties into the Plains
34 Questions
Lunar Architecture and LRO
 Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce
 Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce Dr. Allison Zuniga, Mark Turner and Dr. Dan Rasky NASA Ames Research Center Space Portal Office Mike
Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce Dr. Allison Zuniga, Mark Turner and Dr. Dan Rasky NASA Ames Research Center Space Portal Office Mike
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE
 INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
Analysis of Power Storage Media for the Exploration of the Moon
 Analysis of Power Storage Media for the Exploration of the Moon Michael Loweth, Rachel Buckle ICEUM 9 22-26 th October 2007 ABSL Space Products 2005 2007 Servicing USA and the ROW UNITED KINGDOM Culham
Analysis of Power Storage Media for the Exploration of the Moon Michael Loweth, Rachel Buckle ICEUM 9 22-26 th October 2007 ABSL Space Products 2005 2007 Servicing USA and the ROW UNITED KINGDOM Culham
Exploration Architecture Update
 Exploration Architecture Update Doug Cooke Deputy Associate Administrator Exploration Systems Mission Directorate John Connolly Vehicle Engineering and Integration Lunar Lander Project Office March 14,
Exploration Architecture Update Doug Cooke Deputy Associate Administrator Exploration Systems Mission Directorate John Connolly Vehicle Engineering and Integration Lunar Lander Project Office March 14,
From MARS To MOON. V. Giorgio Director of Italian Programs. Sorrento, October, All rights reserved, 2007, Thales Alenia Space
 From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
NEXT Exploration Science and Technology Mission. Relevance for Lunar Exploration
 NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
Lunette: A Global Network of Small Lunar Landers
 Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
European Lunar Lander: System Engineering Approach
 human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
Abstract #1739. English. French. Author(s) and Co Author(s) Mining the Moon with ispace, a Lunar Exploration Company
 and Co Author(s) Mining the Moon with ispace, a Lunar Exploration Company") 4/25/2017 CIM TPMS Abstract #1739 English Mining the Moon with ispace, a Lunar Exploration Company This presentation will introduce ispace, a lunar exploration company headquartered in Tokyo, Japan, with
4/25/2017 CIM TPMS Abstract #1739 English Mining the Moon with ispace, a Lunar Exploration Company This presentation will introduce ispace, a lunar exploration company headquartered in Tokyo, Japan, with
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012
 Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Landing Targets and Technical Subjects for SELENE-2
 Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, GMT
 Friday, October 30, GMT") Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
RIMRES: A project summary
 RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
Next Steps in Human Exploration: Cislunar Systems and Architectures
 Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science
 Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES
 FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
Human Exploration of the Lunar Surface
 International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
The European Lunar Lander Mission
 The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
Long-Range Rovers for Mars Exploration and Sample Return
 2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE
 LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE ABSTRACT With 1 rover, 2 astronauts and 3 days, the Apollo 17 Mission covered over 30 km, setup
LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE ABSTRACT With 1 rover, 2 astronauts and 3 days, the Apollo 17 Mission covered over 30 km, setup
Massachusetts Space Grant Consortium
 Massachusetts Space Grant Consortium Distinguished Lecturer Series NASA Administrator Dr. Michael Griffin NASA s Exploration Architecture March 8, 2006 Why We Explore Human curiosity Stimulates our imagination
Massachusetts Space Grant Consortium Distinguished Lecturer Series NASA Administrator Dr. Michael Griffin NASA s Exploration Architecture March 8, 2006 Why We Explore Human curiosity Stimulates our imagination
Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability
 Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability 2007 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar
Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability 2007 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar
Mars Surface Mobility Proposal
 Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
On Orbit Refueling: Supporting a Robust Cislunar Space Economy
 On Orbit Refueling: Supporting a Robust Cislunar Space Economy Courtesy of NASA 3 April 2017 Copyright 2014 United Launch Alliance, LLC. All Rights Reserved. Atlas V Launch History ULA s Vision: Unleashing
On Orbit Refueling: Supporting a Robust Cislunar Space Economy Courtesy of NASA 3 April 2017 Copyright 2014 United Launch Alliance, LLC. All Rights Reserved. Atlas V Launch History ULA s Vision: Unleashing
An Overview of CSA s s Space Robotics Activities
 An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
Europa Lander Mission Overview and Update
 Europa Lander Mission Overview and Update Steve Sell 15 th International Planetary Probe Workshop, Boulder CO June 2018 2018 California Institute of Technology. Government sponsorship acknowledged. Predecisional
Europa Lander Mission Overview and Update Steve Sell 15 th International Planetary Probe Workshop, Boulder CO June 2018 2018 California Institute of Technology. Government sponsorship acknowledged. Predecisional
 Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
WHAT WE WILL DISCUSS IN THIS VIDEO
 WHAT WE WILL DISCUSS IN THIS VIDEO What is Chandrayaan 2 all about? Why is it special? Have we entered the The Asian space race? Where do China, Japan and India stand? What is the importance of the moon?
WHAT WE WILL DISCUSS IN THIS VIDEO What is Chandrayaan 2 all about? Why is it special? Have we entered the The Asian space race? Where do China, Japan and India stand? What is the importance of the moon?
Canadian Lunar & Planetary Rover. Development
 Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Analysis of Architectures for Long-Range Crewed Moon and Mars Surface Mobility
 AIAA SPACE 2008 Conference & Exposition 9-11 September 2008, San Diego, California AIAA 2008-7914 Analysis of Architectures for Long-Range Crewed Moon and Mars Surface Mobility Wilfried K. Hofstetter 1,
AIAA SPACE 2008 Conference & Exposition 9-11 September 2008, San Diego, California AIAA 2008-7914 Analysis of Architectures for Long-Range Crewed Moon and Mars Surface Mobility Wilfried K. Hofstetter 1,
Suitability of reusability for a Lunar re-supply system
 www.dlr.de Chart 1 Suitability of reusability for a Lunar re-supply system Etienne Dumont Space Launcher Systems Analysis (SART) Institut of Space Systems, Bremen, Germany Etienne.dumont@dlr.de IAC 2016
www.dlr.de Chart 1 Suitability of reusability for a Lunar re-supply system Etienne Dumont Space Launcher Systems Analysis (SART) Institut of Space Systems, Bremen, Germany Etienne.dumont@dlr.de IAC 2016
Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing
 Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing Therese Griebel NASA Glenn Research Center 1 Overview Current developments in technology that could meet NASA, DOD and commercial
Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing Therese Griebel NASA Glenn Research Center 1 Overview Current developments in technology that could meet NASA, DOD and commercial
Light-Lift Rocket II
 Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Name: Space Exploration PBL
 Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Electric Vehicle Simulation and Animation
 Electric Vehicle Simulation and Animation Li Yang, Wade Gasior, Woodlyn Madden, Mark Hairr, Ronald Bailey University of Tennessee at Chattanooga Chattanooga, TN 37403 Abstract Range anxiety is a chief
Electric Vehicle Simulation and Animation Li Yang, Wade Gasior, Woodlyn Madden, Mark Hairr, Ronald Bailey University of Tennessee at Chattanooga Chattanooga, TN 37403 Abstract Range anxiety is a chief
Robo$cs Mission Experience from Mars. Brian Wilcox Mark Maimone Andy Mishkin 5 August 2009
 Robo$cs Mission Experience from Mars Brian Wilcox Mark Maimone Andy Mishkin 5 August 2009 MER Mobility Hardware Wide FOV stereo HAZCAMs (front & rear) for on-board hazard detection Stereo NAVCAMS & PANCAMS
Robo$cs Mission Experience from Mars Brian Wilcox Mark Maimone Andy Mishkin 5 August 2009 MER Mobility Hardware Wide FOV stereo HAZCAMs (front & rear) for on-board hazard detection Stereo NAVCAMS & PANCAMS
This is Ground Control... Professor Derek Long Department of Informatics King s College London
 This is Ground Control... Professor Derek Long Department of Informatics King s College London Deep in Space... Rosetta and Philae 67P/Churyumov-Gerasimenko Launch 2004, arrive 2014 Mars Express 2003 Mars
This is Ground Control... Professor Derek Long Department of Informatics King s College London Deep in Space... Rosetta and Philae 67P/Churyumov-Gerasimenko Launch 2004, arrive 2014 Mars Express 2003 Mars
White Paper. How Do I Know I Can Rely on It? The Business and Technical Cases for Solar-Recharged Video Surveillance Systems
 White Paper How Do I Know I Can Rely on It? The Business and Technical Cases for Solar-Recharged Video Surveillance Systems Introduction Remote cameras are a security professional s eyes at the edges of
White Paper How Do I Know I Can Rely on It? The Business and Technical Cases for Solar-Recharged Video Surveillance Systems Introduction Remote cameras are a security professional s eyes at the edges of
Collaborative Autonomous Ground Vehicles Achieving Energy Independence
 Collaborative Autonomous Ground Vehicles Achieving Energy Independence Richard Stroman, Karen Swider-Lyons, Miguel Diaz, Gedaliah Knizhnik, and William Adams U.S., Washington DC John Palmisano Excet, Inc.,
Collaborative Autonomous Ground Vehicles Achieving Energy Independence Richard Stroman, Karen Swider-Lyons, Miguel Diaz, Gedaliah Knizhnik, and William Adams U.S., Washington DC John Palmisano Excet, Inc.,
Propulsion Controls and Diagnostics Research at NASA GRC Status Report
 Propulsion Controls and Diagnostics Research at NASA GRC Status Report Dr. Sanjay Garg Branch Chief Ph: (216) 433-2685 FAX: (216) 433-8990 email: sanjay.garg@nasa.gov http://www.lerc.nasa.gov/www/cdtb
Propulsion Controls and Diagnostics Research at NASA GRC Status Report Dr. Sanjay Garg Branch Chief Ph: (216) 433-2685 FAX: (216) 433-8990 email: sanjay.garg@nasa.gov http://www.lerc.nasa.gov/www/cdtb
Mobile Payload Element (MPE)
") Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
On the feasibility of a fast track return to Mars
 On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
Two Related Primary Challenges for Successful Renewed Lunar Exploration
 Two Related Primary Challenges for Successful Renewed Lunar Exploration October 10, 2017 Presented By Ron Creel Retired Apollo Lunar Roving Vehicle Team Member OUTLINE Challenge 1 Coping with Exposure
Two Related Primary Challenges for Successful Renewed Lunar Exploration October 10, 2017 Presented By Ron Creel Retired Apollo Lunar Roving Vehicle Team Member OUTLINE Challenge 1 Coping with Exposure
Silicon-Germanium Integrated Electronics for Extreme Environments Applied to the Design of a Lunar Hopper
 Silicon-Germanium Integrated Electronics for Extreme Environments Applied to the Design of a Lunar Hopper Presentation to Leora Peltz (Boeing Phantom Works, Huntington Beach CA, USA) leora.peltz@boeing.com,
Silicon-Germanium Integrated Electronics for Extreme Environments Applied to the Design of a Lunar Hopper Presentation to Leora Peltz (Boeing Phantom Works, Huntington Beach CA, USA) leora.peltz@boeing.com,
Abstract #1756. English. French. Author(s) and Co Author(s) ispace & Team Hakuto s 2017 Lunar Mission
 and Co Author(s) ispace & Team Hakuto s 2017 Lunar Mission") 4/25/2017 CIM TPMS Abstract #1756 English ispace & Team Hakuto s 2017 Lunar Mission This presentation will introduce ispace, a lunar exploration company headquartered in Tokyo, Japan, and Team Hakuto,
4/25/2017 CIM TPMS Abstract #1756 English ispace & Team Hakuto s 2017 Lunar Mission This presentation will introduce ispace, a lunar exploration company headquartered in Tokyo, Japan, and Team Hakuto,
Transatlantic Mining Corporation Kearsarge Drilling Update.
 Transatlantic Mining Corporation Kearsarge Drilling Update. TCO NEWS RELEASE-VANCOUVER, B.C., March 2, 2018 Transatlantic Mining Corp. (the Company ) (TCO:TSX.V) is pleased to announce that further due
Transatlantic Mining Corporation Kearsarge Drilling Update. TCO NEWS RELEASE-VANCOUVER, B.C., March 2, 2018 Transatlantic Mining Corp. (the Company ) (TCO:TSX.V) is pleased to announce that further due
ASX RELEASE. PAK receives drilling permit for Elko Coking coal project. Summary
 ASX RELEASE ASX Release Tuesday 24 April 2018 ASX Code PAK About Us Pacific American Coal Limited (the Company) is focused on the production, development and exploration of metallurgical coal assets in
ASX RELEASE ASX Release Tuesday 24 April 2018 ASX Code PAK About Us Pacific American Coal Limited (the Company) is focused on the production, development and exploration of metallurgical coal assets in
Solar Emergency Preparedness Signs
 Solar Powered Signage Powered by Powerline Technology Solar Emergency Preparedness Signs Electrical Grid Failure Caused By: Blackouts Hurricanes Ice Storms Coastal Flooding Homeland Security-Related Incidents
Solar Powered Signage Powered by Powerline Technology Solar Emergency Preparedness Signs Electrical Grid Failure Caused By: Blackouts Hurricanes Ice Storms Coastal Flooding Homeland Security-Related Incidents
The Common Spacecraft Bus and Lunar Commercialization
 The Common Spacecraft Bus and Lunar Commercialization Alex MacDonald NASA Ames Research Center alex.macdonald@balliol.ox.ac.uk Will Marshall NASA Ames Research Center william.s.marshall@nasa.gov Summary
The Common Spacecraft Bus and Lunar Commercialization Alex MacDonald NASA Ames Research Center alex.macdonald@balliol.ox.ac.uk Will Marshall NASA Ames Research Center william.s.marshall@nasa.gov Summary
Over-Snow Rovers for Polar Science Campaigns
 Over-Snow Rovers for Polar Science Campaigns J.H. Lever 1, L.E. Ray 2, A.M. Morlock 2, A.M. Burzynski 1, R.M. Williams 2 1 Cold Regions Research and Engineering Laboratory, Hanover, NH 2 Thayer School
Over-Snow Rovers for Polar Science Campaigns J.H. Lever 1, L.E. Ray 2, A.M. Morlock 2, A.M. Burzynski 1, R.M. Williams 2 1 Cold Regions Research and Engineering Laboratory, Hanover, NH 2 Thayer School
Europa Lander. Mission Concept Update 3/29/2017
 Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
Appendix E3. Open Pit Pioneering and Pre-production
 Appendix E3 Open Pit Pioneering and Pre-production File Note From: George Dermer To: File Date: January 11, 2012 Re: KSM Mitchell Pit Mine Pre-Production and Start-up plan Summary: Pre-Production mining
Appendix E3 Open Pit Pioneering and Pre-production File Note From: George Dermer To: File Date: January 11, 2012 Re: KSM Mitchell Pit Mine Pre-Production and Start-up plan Summary: Pre-Production mining
lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow
 lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow John Connolly Lunar Lander Project Office 1 Components of Program Constellation Earth Departure Stage Ares V - Heavy
lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow John Connolly Lunar Lander Project Office 1 Components of Program Constellation Earth Departure Stage Ares V - Heavy
Project Report Cover Page
 New York State Pollution Prevention Institute R&D Program 2015-2016 Student Competition Project Report Cover Page University/College Name Team Name Team Member Names SUNY Buffalo UB-Engineers for a Sustainable
New York State Pollution Prevention Institute R&D Program 2015-2016 Student Competition Project Report Cover Page University/College Name Team Name Team Member Names SUNY Buffalo UB-Engineers for a Sustainable
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return
 Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
Targeting Energy Efficiency and Demand Response Projects. Sam Borgeson Energy and Resource Group UC Berkeley
 Targeting Energy Efficiency and Demand Response Projects Sam Borgeson Energy and Resource Group UC Berkeley sborgeson@berkeley.edu EE and DR definitions (for this talk) Energy Efficiency is a permanent*
Targeting Energy Efficiency and Demand Response Projects Sam Borgeson Energy and Resource Group UC Berkeley sborgeson@berkeley.edu EE and DR definitions (for this talk) Energy Efficiency is a permanent*
BUS STOP DESIGN & PLANNING GUIDE
 BUS STOP DESIGN & PLANNING GUIDE Prepared by the Operations and Planning Departments 2011 PURPOSE OF GUIDE The design of passenger waiting areas plays a significant role in a person s decision of whether
BUS STOP DESIGN & PLANNING GUIDE Prepared by the Operations and Planning Departments 2011 PURPOSE OF GUIDE The design of passenger waiting areas plays a significant role in a person s decision of whether
Lunar Robotics. Dr. Rob Ambrose, NASA JSC December Dr. Robert O. Ambrose
 Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
Lunar Surface Access from Earth-Moon L1/L2 A novel lander design and study of alternative solutions
 Lunar Surface Access from Earth-Moon L1/L2 A novel lander design and study of alternative solutions 28 November 2012 Washington, DC Revision B Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
Lunar Surface Access from Earth-Moon L1/L2 A novel lander design and study of alternative solutions 28 November 2012 Washington, DC Revision B Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
Critical Chain Project Management (CCPM)
") Critical Chain Project Management (CCPM) Sharing of concepts and deployment strategy Ashok Muthuswamy April 2018 1 Objectives Why did we implement CCPM at Tata Chemicals? Provide an idea of CCPM, its concepts
Critical Chain Project Management (CCPM) Sharing of concepts and deployment strategy Ashok Muthuswamy April 2018 1 Objectives Why did we implement CCPM at Tata Chemicals? Provide an idea of CCPM, its concepts
A New Facility for Lander Touchdown and Rover Mobility Testing at DLR
 A New Facility for Lander Touchdown and Rover Mobility Testing at DLR Lutz Richter, Antje Brucks, Lars Witte DLR Institute of Space Systems, Bremen, Germany New DLR Institute of Space Systems Systems Analysis
A New Facility for Lander Touchdown and Rover Mobility Testing at DLR Lutz Richter, Antje Brucks, Lars Witte DLR Institute of Space Systems, Bremen, Germany New DLR Institute of Space Systems Systems Analysis
F/A-18A/B/C/D Flight Control Computer Software Upgrade
 F/A-18A/B/C/D Flight Control Computer Software Upgrade V10.7 Military Aircraft System Verification and Validation MIT 16.885J/ESD.35J Fall 2004 CDR Paul Sohl Commanding Officer United States Naval Test
F/A-18A/B/C/D Flight Control Computer Software Upgrade V10.7 Military Aircraft System Verification and Validation MIT 16.885J/ESD.35J Fall 2004 CDR Paul Sohl Commanding Officer United States Naval Test
Reference Science Scenario for SDT Report
 MARS 2007 SMART LANDER Reference Science Scenario for SDT Report 9/17/01 Jennifer Mindock Leslie Tamppari Daniel Limonadi Sue Smrekar Reference Mission Big Picture Total duration of mission = 180 sols
MARS 2007 SMART LANDER Reference Science Scenario for SDT Report 9/17/01 Jennifer Mindock Leslie Tamppari Daniel Limonadi Sue Smrekar Reference Mission Big Picture Total duration of mission = 180 sols
CHANGING ENTRY, DESCENT, AND LANDING PARADIGMS FOR HUMAN MARS LANDER
 National Aeronautics and Space Administration CHANGING ENTRY, DESCENT, AND LANDING PARADIGMS FOR HUMAN MARS LANDER Alicia Dwyer Cianciolo NASA Langley Research Center 2018 International Planetary Probe
National Aeronautics and Space Administration CHANGING ENTRY, DESCENT, AND LANDING PARADIGMS FOR HUMAN MARS LANDER Alicia Dwyer Cianciolo NASA Langley Research Center 2018 International Planetary Probe
Planetary Surface Transportation and Site Development
 Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
Challenges of Designing the MarsNEXT Network
 Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
UAV Magnetometry for Mineral Exploration
 UAV Magnetometry for Mineral Exploration Case Study: Île Calumet, QC JC Ricard, CEO Devbrio Géophysique C. Mercier, Jr. Eng. J. Blanchard, M.Sc. Geophysics Devbrio UAV magnetometer 1 Developed by Devbrio
UAV Magnetometry for Mineral Exploration Case Study: Île Calumet, QC JC Ricard, CEO Devbrio Géophysique C. Mercier, Jr. Eng. J. Blanchard, M.Sc. Geophysics Devbrio UAV magnetometer 1 Developed by Devbrio
The Role of Nuclear Power
 The Role of Nuclear Power Chris Larsen Vice President, Nuclear Power June 23, 2009 Our Mission To conduct research on key issues facing the electricity sector on behalf of its members, energy stakeholders,
The Role of Nuclear Power Chris Larsen Vice President, Nuclear Power June 23, 2009 Our Mission To conduct research on key issues facing the electricity sector on behalf of its members, energy stakeholders,
DER Commissioning Guidelines Community Scale PV Generation Interconnected Using Xcel Energy s Minnesota Section 10 Tariff Version 1.
 Community Scale PV Generation Interconnected Using Xcel Energy s Minnesota Section 10 Tariff Version 1.3, 5/16/18 1.0 Scope This document is currently limited in scope to inverter interfaced PV installations
Community Scale PV Generation Interconnected Using Xcel Energy s Minnesota Section 10 Tariff Version 1.3, 5/16/18 1.0 Scope This document is currently limited in scope to inverter interfaced PV installations
GROVER: An Autonomous Vehicle for Ice Sheet Research
 GROVER: An Autonomous Vehicle for Ice Sheet Research April 17, 2014 Introduction What is GROVER? Goddard Remotely Operated Vehicle for Exploration and Research Developed closely with Lora Koenig Introduction
GROVER: An Autonomous Vehicle for Ice Sheet Research April 17, 2014 Introduction What is GROVER? Goddard Remotely Operated Vehicle for Exploration and Research Developed closely with Lora Koenig Introduction
Rocketry Projects Conducted at the University of Cincinnati
 Rocketry Projects Conducted at the University of Cincinnati 2009-2010 Grant Schaffner, Ph.D. (Advisor) Rob Charvat (Student) 17 September 2010 1 Spacecraft Design Course Objectives Students gain experience
Rocketry Projects Conducted at the University of Cincinnati 2009-2010 Grant Schaffner, Ph.D. (Advisor) Rob Charvat (Student) 17 September 2010 1 Spacecraft Design Course Objectives Students gain experience
Materials First use of high performance ceramics for full ocean depth floatation. HROV will be the first project to exploit high strength ceramic tech
 11,000 Meter HROV Development Program and its Relation to Oceanographic and Commercial Undersea Use February 2006 Andy Bowen, Dr. Dana Yoerger, (Woods Hole Oceanographic Institution), Dr. Louis Whitcomb
11,000 Meter HROV Development Program and its Relation to Oceanographic and Commercial Undersea Use February 2006 Andy Bowen, Dr. Dana Yoerger, (Woods Hole Oceanographic Institution), Dr. Louis Whitcomb
Hawaii Fire Risk Mapping Project
 HIGICC Conference September 24, 2009 Hawaii Fire Risk Mapping Project Rich Nezelek, Sr. Imagery Analyst Chris Chiesa, Chief Information Officer Pacific Disaster Center www.pdc.org Presentation Overview
HIGICC Conference September 24, 2009 Hawaii Fire Risk Mapping Project Rich Nezelek, Sr. Imagery Analyst Chris Chiesa, Chief Information Officer Pacific Disaster Center www.pdc.org Presentation Overview
Automated Vehicles: Terminology and Taxonomy
 Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
Exhibit R-2, RDT&E Budget Item Justification
 PE NUMBER: 0207446F PE TITLE: Bomber Tactical Data Link Exhibit R-2, RDT&E Budget Item Justification BUDGET ACTIVITY PE NUMBER AND TITLE 07 Operational System Development 0207446F Bomber Tactical Data
PE NUMBER: 0207446F PE TITLE: Bomber Tactical Data Link Exhibit R-2, RDT&E Budget Item Justification BUDGET ACTIVITY PE NUMBER AND TITLE 07 Operational System Development 0207446F Bomber Tactical Data
Travel: Detailed Flight Plan
 DarkSide Logistics Lunar Spaceport Initiative Travel: Detailed Flight Plan The payload will be launched from Cape Canaveral Air Force Station Launch Complex 46 at 15:59:35 ET on January 25, 2010, using
DarkSide Logistics Lunar Spaceport Initiative Travel: Detailed Flight Plan The payload will be launched from Cape Canaveral Air Force Station Launch Complex 46 at 15:59:35 ET on January 25, 2010, using
Multi-INT Manned Airborne ISR
 Multi-INT Manned Airborne ISR This briefing has been approved for release by LM IS&GS Export/Import Office. All exports, sales and offerings of the systems, products and solutions referenced herein are
Multi-INT Manned Airborne ISR This briefing has been approved for release by LM IS&GS Export/Import Office. All exports, sales and offerings of the systems, products and solutions referenced herein are
DEVELOPMENT PROPERTY 1627 MAXIME STREET CITY OF OTTAWA TRANSPORTATION OVERVIEW. Prepared for: Subhas Bhargava. July 9, Overview_1.
 DEVELOPMENT PROPERTY 1627 MAXIME STREET CITY OF OTTAWA TRANSPORTATION OVERVIEW Prepared for: Subhas Bhargava July 9, 2015 115-620 Overview_1.doc D. J. Halpenny & Associates Ltd. Consulting Transportation
DEVELOPMENT PROPERTY 1627 MAXIME STREET CITY OF OTTAWA TRANSPORTATION OVERVIEW Prepared for: Subhas Bhargava July 9, 2015 115-620 Overview_1.doc D. J. Halpenny & Associates Ltd. Consulting Transportation
LUNAR INDUSTRIAL RESEARCH BASE. Yuzhnoye SDO proprietary
 LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
City of Palo Alto (ID # 6416) City Council Staff Report
 City Council Staff Report") City of Palo Alto (ID # 6416) City Council Staff Report Report Type: Informational Report Meeting Date: 1/25/2016 Summary Title: Update on Second Transmission Line Title: Update on Progress Towards Building
City of Palo Alto (ID # 6416) City Council Staff Report Report Type: Informational Report Meeting Date: 1/25/2016 Summary Title: Update on Second Transmission Line Title: Update on Progress Towards Building
Western NY Public Policy Transmission Planning Report
 Western NY Public Policy Transmission Planning Report Dawei Fan Supervisor, Public Policy and Interregional Planning Business Issues Committee September 12, 2017 Operating Committee September 15, 2017
Western NY Public Policy Transmission Planning Report Dawei Fan Supervisor, Public Policy and Interregional Planning Business Issues Committee September 12, 2017 Operating Committee September 15, 2017
AN The SmartSensor HD as an Automatic Traffic Recorder. Automatic Traffic Recorders
 AN-0006 The SmartSensor HD as an Automatic Traffic Recorder The Wavetronix SmartSensor HD can be used as an automatic traffic recorder (ATR) in the process of gathering, storing and analyzing traffic data.
AN-0006 The SmartSensor HD as an Automatic Traffic Recorder The Wavetronix SmartSensor HD can be used as an automatic traffic recorder (ATR) in the process of gathering, storing and analyzing traffic data.
Autonomous Sample Acquisition for the ExoMars Rover
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Autonomous Sample Acquisition for
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Autonomous Sample Acquisition for
FINAL REPORT CATHODIC PROTECTION EVALUATION. 42-Inch Water Transmission Pipeline Contract 1 Station 0+00 to South Texas Water Authority
 FINAL REPORT CATHODIC PROTECTION EVALUATION 42-Inch Water Transmission Pipeline Contract 1 Station 0+00 to 50+00 South Texas Water Authority Prepared for: South Texas Water Authority P.O. Box 1701 Kingsville,
FINAL REPORT CATHODIC PROTECTION EVALUATION 42-Inch Water Transmission Pipeline Contract 1 Station 0+00 to 50+00 South Texas Water Authority Prepared for: South Texas Water Authority P.O. Box 1701 Kingsville,
BATTERY FOR EXTENDED TEMPERATURE RANGE EXOMARS ROVER MISSION
 BATTERY FOR EXTENDED TEMPERATURE RANGE EXOMARS ROVER MISSION Steve AMOS (1), Paul BROCHARD (2) (1) AIRBUS Defence and Space, Gunnels Wood Road, Stevenage United Kingdom, Email: stephen.amos@airbus.com
BATTERY FOR EXTENDED TEMPERATURE RANGE EXOMARS ROVER MISSION Steve AMOS (1), Paul BROCHARD (2) (1) AIRBUS Defence and Space, Gunnels Wood Road, Stevenage United Kingdom, Email: stephen.amos@airbus.com
MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region
 MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region David Willson (david.willson@au.tenovagroup.com) and Jonathan D. A. Clarke (jon.clarke@bigpond.com), Mars Society Australia The centrepiece
MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region David Willson (david.willson@au.tenovagroup.com) and Jonathan D. A. Clarke (jon.clarke@bigpond.com), Mars Society Australia The centrepiece
VACCO ChEMS Micro Propulsion Systems Advances and Experience in CubeSat Propulsion System Technologies
 VACCO ChEMS Micro Propulsion Systems Advances and Experience in CubeSat Propulsion System Technologies May 1 st, 2018 VACCO Proprietary Data Shall Not Be Disclosed Without Written Permission of VACCO VACCO
VACCO ChEMS Micro Propulsion Systems Advances and Experience in CubeSat Propulsion System Technologies May 1 st, 2018 VACCO Proprietary Data Shall Not Be Disclosed Without Written Permission of VACCO VACCO
350 International Atlas of Lunar Exploration
 :UP/3-PAGINATION/IAW-PROOFS/3B2/978«52181«5(M.3D 3 5 0 [7428] 19.8.20073:28PM 350 International Atlas of Lunar Exploration 8 January 1973: Luna 21 and Lunokhod 2 (Soviet Union) The 4850 kg Luna 21 spacecraft
:UP/3-PAGINATION/IAW-PROOFS/3B2/978«52181«5(M.3D 3 5 0 [7428] 19.8.20073:28PM 350 International Atlas of Lunar Exploration 8 January 1973: Luna 21 and Lunokhod 2 (Soviet Union) The 4850 kg Luna 21 spacecraft
The Airline Industry Delta Air Lines, Inc. Technical Operations Engine Maintenance Operations
 The Airline Industry Delta Air Lines, Inc. Technical Operations Engine Maintenance Operations A Case Study: The Change and Challenge in Engine Maintenance Gary Adams Matt Sparks Manager, Engine Repair
The Airline Industry Delta Air Lines, Inc. Technical Operations Engine Maintenance Operations A Case Study: The Change and Challenge in Engine Maintenance Gary Adams Matt Sparks Manager, Engine Repair
Unmanned autonomous vehicles in air land and sea
 based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
ASIP on the U-2U. 560 th Aircraft Sustainment Group (C2ISR)
") ASIP on the U-2U Tailoring of an Aircraft Structural Integrity Program for High Demand, Low Density Pre-ASIP Aircraft Briefers: Mr Scott Mangrum 560 ACSG, Robins AFB Mr Greg Birdsall LM Aero-Palmdale December
ASIP on the U-2U Tailoring of an Aircraft Structural Integrity Program for High Demand, Low Density Pre-ASIP Aircraft Briefers: Mr Scott Mangrum 560 ACSG, Robins AFB Mr Greg Birdsall LM Aero-Palmdale December
Lunar Cargo Capability with VASIMR Propulsion
 Lunar Cargo Capability with VASIMR Propulsion Tim Glover, PhD Director of Development Outline Markets for the VASIMR Capability Near-term Lunar Cargo Needs Long-term/VSE Lunar Cargo Needs Comparison with
Lunar Cargo Capability with VASIMR Propulsion Tim Glover, PhD Director of Development Outline Markets for the VASIMR Capability Near-term Lunar Cargo Needs Long-term/VSE Lunar Cargo Needs Comparison with
ANDERSON, ECKSTEIN AND WESTRICK, INC.
 ANDERSON, ECKSTEIN AND WESTRICK, INC. 51301 Schoenherr Civil Engineers Road, Shelby Township, Michigan 48315 Surveyors Architects 586-726-1234 Mr. Matthew Tepper City of Grosse Pointe Farms 90 Kerby Road
ANDERSON, ECKSTEIN AND WESTRICK, INC. 51301 Schoenherr Civil Engineers Road, Shelby Township, Michigan 48315 Surveyors Architects 586-726-1234 Mr. Matthew Tepper City of Grosse Pointe Farms 90 Kerby Road
Implementation of telecontrol of solar home system based on Arduino via smartphone
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Implementation of telecontrol of solar home system based on Arduino via smartphone To cite this article: B Herdiana and I F Sanjaya
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Implementation of telecontrol of solar home system based on Arduino via smartphone To cite this article: B Herdiana and I F Sanjaya
How O&G know-how can leverage the geothermal industry
 How O&G know-how can leverage the geothermal industry GeoEnergi2017, Bergen 22.05.2017 Classification: Open Statoil ASA 18 mai 20 2 Classification: Open 18 mai 2017 Statoil ASA Building a profitable new
How O&G know-how can leverage the geothermal industry GeoEnergi2017, Bergen 22.05.2017 Classification: Open Statoil ASA 18 mai 20 2 Classification: Open 18 mai 2017 Statoil ASA Building a profitable new
Mars 2018 Mission Status and Sample Acquisition Issues
 Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
SMT. Installation and Operation Manual. Model:SMT WITH MPPT TECHNOLOGY
 SMT WITH MPPT TECHNOLOGY Installation and Operation Manual Model:SMT SMT Dimensions Specification Summary System Voltage 12 V/24V Rated Battery Current 12V, 5A 8A 10A 15A 20A 25A 24V, 5A 8A 10A 15A Rated
SMT WITH MPPT TECHNOLOGY Installation and Operation Manual Model:SMT SMT Dimensions Specification Summary System Voltage 12 V/24V Rated Battery Current 12V, 5A 8A 10A 15A 20A 25A 24V, 5A 8A 10A 15A Rated
TACOMA PUMP STATION 4103 FORCE MAIN HDD PROJECT: A SHORT BORE WITH TALL CHALLENGES
 North American Society for Trenchless Technology (NASTT) No-Dig Show 2011 Washington, D.C. March 27-31, 2011 Paper D-2-04 TACOMA PUMP STATION 4103 FORCE MAIN HDD PROJECT: A SHORT BORE WITH TALL CHALLENGES
North American Society for Trenchless Technology (NASTT) No-Dig Show 2011 Washington, D.C. March 27-31, 2011 Paper D-2-04 TACOMA PUMP STATION 4103 FORCE MAIN HDD PROJECT: A SHORT BORE WITH TALL CHALLENGES