GROVER: An Autonomous Vehicle for Ice Sheet Research
|
|
|
- Flora May
- 6 years ago
- Views:
Transcription
1 GROVER: An Autonomous Vehicle for Ice Sheet Research April 17, 2014

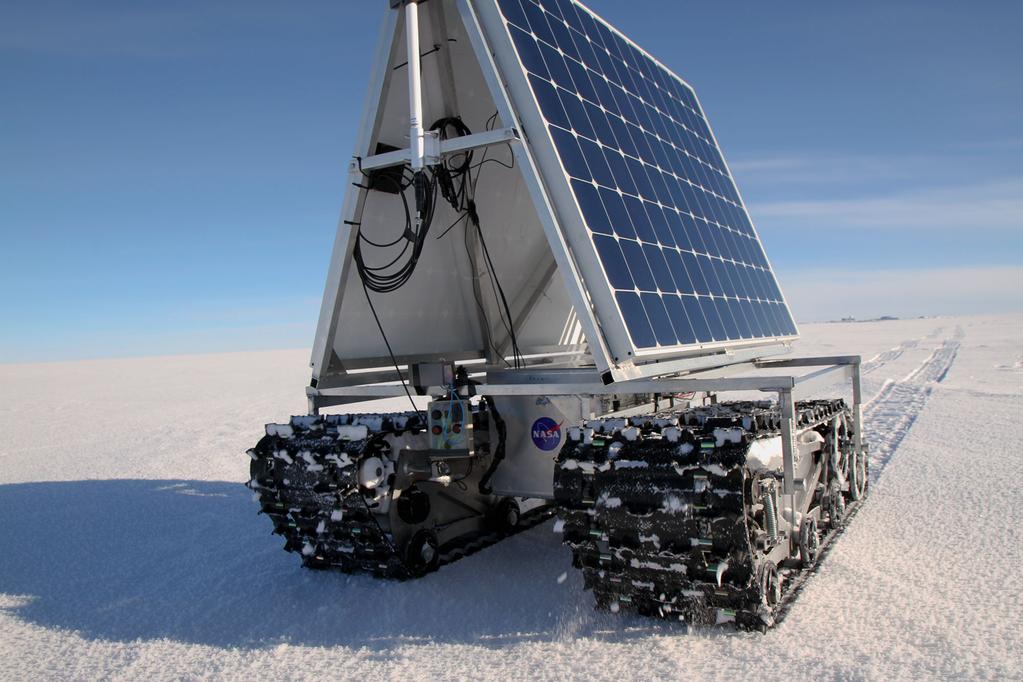
2 Introduction What is GROVER? Goddard Remotely Operated Vehicle for Exploration and Research Developed closely with Lora Koenig

3 Introduction What is GROVER? Goddard Remotely Operated Vehicle for Exploration and Research Developed closely with Lora Koenig
4 Introduction What is GROVER? Goddard Remotely Operated Vehicle for Exploration and Research Developed closely with Lora Koenig Fully autonomous (GPS, Telemetry, Failure modes)
5 Introduction What is GROVER? Goddard Remotely Operated Vehicle for Exploration and Research Developed closely with Lora Koenig Fully autonomous (GPS, Telemetry, Failure modes) Solar-powered
6 Introduction What is GROVER? Goddard Remotely Operated Vehicle for Exploration and Research Developed closely with Lora Koenig Fully autonomous (GPS, Telemetry, Failure modes) Solar-powered Controlled via satellite or line-of-sight radio (WiFi)

7 Introduction What is GROVER? Goddard Remotely Operated Vehicle for Exploration and Research Developed closely with Lora Koenig Fully autonomous (GPS, Telemetry, Failure modes) Solar-powered Controlled via satellite or line-of-sight radio (WiFi) Tested in the field in May/June 2013
8 Original Demonstrate that it could: Operate 24/7, in harsh environment Summit Kilometers 50 km Grid WiFi grid and Iceast line Kilometers Summit
9 Original Demonstrate that it could: Operate 24/7, in harsh environment Complete track within two weeks Summit Kilometers 50 km Grid WiFi grid and Iceast line Kilometers Summit
10 Original Demonstrate that it could: Operate 24/7, in harsh environment Complete track within two weeks Go over same point to maximize crossover Summit Kilometers 50 km Grid WiFi grid and Iceast line Kilometers Summit
11 Original Demonstrate that it could: Operate 24/7, in harsh environment Complete track within two weeks Go over same point to maximize crossover Successfully completed stage 2
12 Original Demonstrate that it could: Operate 24/7, in harsh environment Complete track within two weeks Go over same point to maximize crossover Successfully completed stage 2 Performed additional power failure tests 1Km Path Traveled Base Camp
13 Requirements Zero emissions vehicle
14 Requirements Zero emissions vehicle Running 24/7
15 Requirements Zero emissions vehicle Running 24/7 Operational in the extreme cold High efficiency solar panels (300W, 20%)
 Constant sensor monitoring GPS 2 Temperature 2 Voltage 1 Current Two 20 Amp motors, travel over powder and")
16 Requirements Zero emissions vehicle Running 24/7 Operational in the extreme cold High efficiency solar panels (300W, 20%) Constant sensor monitoring GPS 2 Temperature 2 Voltage 1 Current Two 20 Amp motors, travel over powder and sastrugi
17 POWER CONSUMPTION POWER SYSTEM SOLAR CHARGER 12V 60A 12V 60A 12V 60A 12V 60A 2 x 300W MICROCONTROLLER IRIDIUM SENSORS 1W RADAR 30W COMPUTER 50W INSTRU MENT 6W 570W TEMP SENSOR VOLT SENSOR TEMP SENSOR VOLT SENSOR CURRENT SENSOR GPS MODULE PYTHON MAIN COMPUTER INSTRUMENT COMPUTER MATLAB RADAR MOTORS 480W 20A 20A MOTOR CONTROLLER SENSORS MOTORS MICRO CONTROLLER IRIDIUM LINK CTL MICRO CONTROLLER IRIDIUM BOARD

18 Instrument FMCW radar, low-power 4GHz - 10GHz c Charly Whisky

19 Introduction Instrument FMCW radar, low-power 4GHz - 10GHz Footprint between tracks

20 Instrument FMCW radar, low-power 4GHz - 10GHz Footprint between tracks Ice layer present between 50cm-100cm c NASA
21 Power Consumption Autonomy of 6 hours (14Km) recharges in 6 hours Total power consumption 570W Can power on-board or external instruments Voltage (v) Samples (every ~246s)
22 Power Consumption Autonomy of 6 hours (14Km) recharges in 6 hours Total power consumption 570W Can power on-board or external instruments Sensor malfunction (disclaimer) Current sensor failed within 48 hours Had no replacement Took us days to figure it out Computer battery failed as well
23 Power Consumption Autonomy of 6 hours (14Km) recharges in 6 hours Total power consumption 570W Can power on-board or external instruments 26 Voltage (v) Samples (every ~246s) Time Series Plot: Voltage over time v unnamed Voltage Linear Fit 1 hour Time (seconds)
24 28 Data lost due defective battery on PC Power (volts) Heading (degrees) 400 Batteries charging x 10 4
25 28 Data lost due defective battery on PC Power (volts) Heading (degrees) 400 Batteries charging x 10 4
26 Designed to be used in many applications
27 Designed to be used in many applications Publisher/Subscriber design pattern
28 Designed to be used in many applications Publisher/Subscriber design pattern Written in Python gpscomponentpy headingcomponentpy iridiumcomponentpy motorcomponentpy navigationcomponentpy radarcomputercomponentpy telemetrycomponentpy
29 CONTROL GROVER CONTROLLER COMMUNICATIONS STACK COMMUNICATIONS LOS WIRELESS COMMUNICATIONS WIRED CONNECTION COMMUNICATIONS IRIDIUM LINK DATA BUS COMPONENT COMPONENT COMPONENT COMPONENT GPS NAVIGATION MOTOR CONTROL INSTRUMENT CONTROL OPERATIONAL COMPONENTS FACTORY FACTORY SERVER COMMUNICATIONS FACTORY COMPONENT FACTORY GROVER SERVER
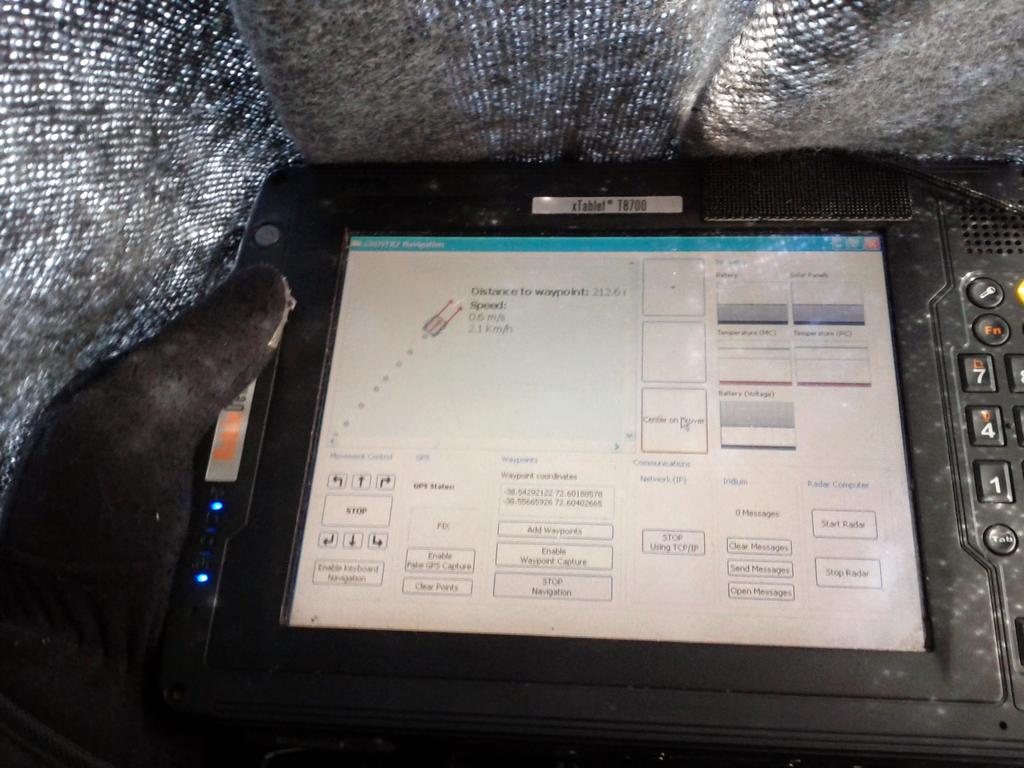
30 GUI
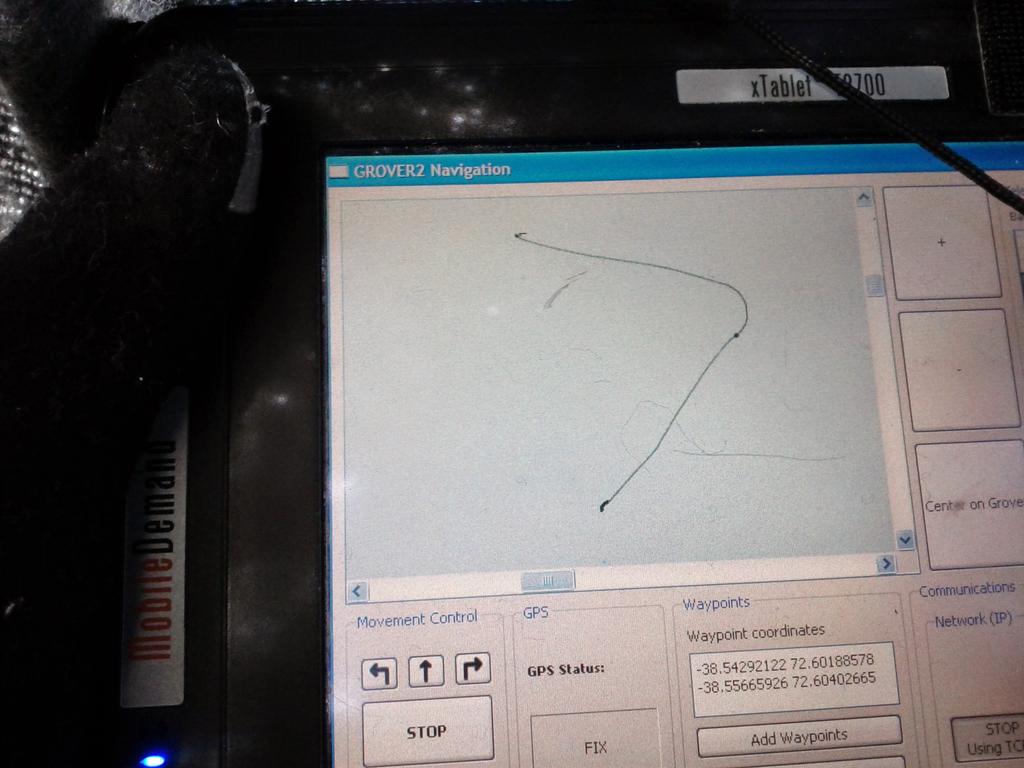
31 GUI
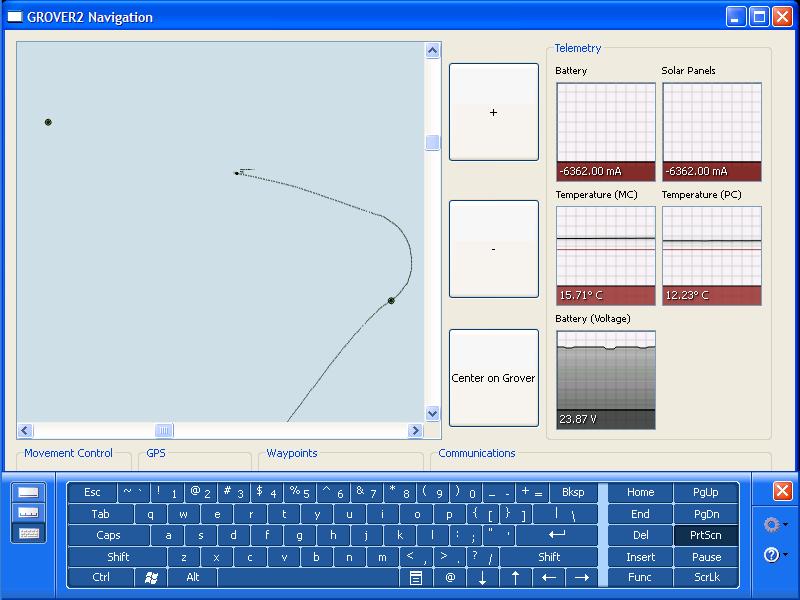
32 GUI


33 Communications CONTROLLER-BOUND Internet Iridium Satellite GROVER-BOUND Ground Station Directional Antenna Robot Controller GUI GROVER Controller Computer
34 Field Performance Collected 20GB of data

35 Field Performance Collected 20GB of data Covered 30+ Km
36 Time Series Plot: Temperature PC Section Time (seconds) x 10 4 Introduction Field Performance Collected 20GB of data Covered 30+ Km Found that temperature didn t affect performance Temperature (C)

37 Field Performance Collected 20GB of data Covered 30+ Km Found that temperature didn t affect performance Simple engineering mistakes were very expensive yet


38 Introduction Field Performance Collected 20GB of data Covered 30+ Km Found that temperature didn t affect performance Simple engineering mistakes were very expensive yet Mark Robertson, Cryogars working on data
39 GROVER demonstrates that autonomous rovers can be a revolutionary tool in polar research
40 GROVER demonstrates that autonomous rovers can be a revolutionary tool in polar research The technology and the software are available and ready to be implemented
41 GROVER demonstrates that autonomous rovers can be a revolutionary tool in polar research The technology and the software are available and ready to be implemented Exciting new opportunities using this platform for scientific data collection

42 Future/Current Work Working with Alberto Behar Bigger/better solar panels Redundancy in sensors Rewiring electrical systems Optimize travel path to maximize exposure to the Sun Add visual indicators to facilitate the localization of the robot in poor visibility conditions
: 1-5 JH Lever and LR Ray, Revised Solar-Power Budget for Cool Robot Polar Science Campaigns, Cold Regions Science and Technology, 52(2), (2008): 177-190 CM Gifford, EL Akers, RS")
43 References Gary Koh, James H Lever, Steven A Arcone, Hans-Peter Marshall, and Laura E Ray "Autonomous FMCW Radar Survey of Antarctic Shear Zone" 13th International Conference on Ground Penetrating Radar (2010): 1-5 JH Lever and LR Ray, Revised Solar-Power Budget for Cool Robot Polar Science Campaigns, Cold Regions Science and Technology, 52(2), (2008): CM Gifford, EL Akers, RS Stansbury, and A Agah, "Mobile Robots for Polar Remote Sensing," In Guarav S Sukhatme (Ed), The Path to Autonomous Robots, Springer-Verlag, Heidelberg, Germany, (2009): 1-22 Acknowledgements NASA EPSCoR grant #NNX10AN30A For founding this project CH2M HILL Polar Field Services Logistics support and invaluable help in the field NASAś Engineering Bootcamp Michael Comberiate and students who prototyped and built GROVER Contact Information gabrieltrisca@boisestateedu
44
Over-Snow Rovers for Polar Science Campaigns
 Over-Snow Rovers for Polar Science Campaigns J.H. Lever 1, L.E. Ray 2, A.M. Morlock 2, A.M. Burzynski 1, R.M. Williams 2 1 Cold Regions Research and Engineering Laboratory, Hanover, NH 2 Thayer School
Over-Snow Rovers for Polar Science Campaigns J.H. Lever 1, L.E. Ray 2, A.M. Morlock 2, A.M. Burzynski 1, R.M. Williams 2 1 Cold Regions Research and Engineering Laboratory, Hanover, NH 2 Thayer School
Formation Flying Experiments on the Orion-Emerald Mission. Introduction
 Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
GCAT. University of Michigan-Dearborn
 GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
Table of Contents. Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.
 Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.") March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
Modeling and Simulation of a Mobile Robot for Polar Environments
 Modeling and Simulation of a Mobile Robot for Polar Environments Thesis Presented by Eric Akers October 20, 2003 Committee Chair Professor Agah Committee Member Professor Minden Committee Member Professor
Modeling and Simulation of a Mobile Robot for Polar Environments Thesis Presented by Eric Akers October 20, 2003 Committee Chair Professor Agah Committee Member Professor Minden Committee Member Professor
RIMRES: A project summary
 RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
Presented at the 2012 Aerospace Space Power Workshop Manhattan Beach, CA April 16-20, 2012
 Complex Modeling of LiIon Cells in Series and Batteries in Parallel within Satellite EPS Time Dependent Simulations Presented at the 2012 Aerospace Space Power Workshop Manhattan Beach, CA April 16-20,
Complex Modeling of LiIon Cells in Series and Batteries in Parallel within Satellite EPS Time Dependent Simulations Presented at the 2012 Aerospace Space Power Workshop Manhattan Beach, CA April 16-20,
Advances in Remote Seismic Station Technology. Polar Technology Conference 2014
 Advances in Remote Seismic Station Technology Polar Technology Conference 2014 1 Overview PASSCAL polar program overview Cold temperature performance of LiFePO 4 batteries Advances in real time data transmission
Advances in Remote Seismic Station Technology Polar Technology Conference 2014 1 Overview PASSCAL polar program overview Cold temperature performance of LiFePO 4 batteries Advances in real time data transmission
Power and Deployment Workshop
 Power and Deployment Workshop Tracy Dahl Polar Field Services Tim Parker PASSCAL Polar Seth White UNAVCO Polar Common Polar Power Technologies Solar: Abundant power source during summer months, and relatively
Power and Deployment Workshop Tracy Dahl Polar Field Services Tim Parker PASSCAL Polar Seth White UNAVCO Polar Common Polar Power Technologies Solar: Abundant power source during summer months, and relatively
European Lunar Lander: System Engineering Approach
 human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
Offshore Platform Installations
 Offshore Platform Installations GLOBAL POWER TECHNOLOGIES Power where you need it. www.genthermglobalpower.com ADVANTAGES OF THERMOELECTRIC GENERATORS FOR OFFSHORE PLATFORM INSTALLATIONS Offshore operators
Offshore Platform Installations GLOBAL POWER TECHNOLOGIES Power where you need it. www.genthermglobalpower.com ADVANTAGES OF THERMOELECTRIC GENERATORS FOR OFFSHORE PLATFORM INSTALLATIONS Offshore operators
Syllabus: Automated, Connected, and Intelligent Vehicles
 Page 1 of 8 Syllabus: Automated, Connected, and Intelligent Vehicles Part 1: Course Information Description: Automated, Connected, and Intelligent Vehicles is an advanced automotive technology course that
Page 1 of 8 Syllabus: Automated, Connected, and Intelligent Vehicles Part 1: Course Information Description: Automated, Connected, and Intelligent Vehicles is an advanced automotive technology course that
Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination
: An Autonomous Vessel for Data Acquisition and Dissemination") Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination AUV Lab @ MIT Sea Grant Alon Yaari, Michael Sacarny, Michael DeFilippo, Husayn Karimi, Paris Perdikaris MOOS-DAWG 2015
Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination AUV Lab @ MIT Sea Grant Alon Yaari, Michael Sacarny, Michael DeFilippo, Husayn Karimi, Paris Perdikaris MOOS-DAWG 2015
NASA University Student Launch Initiative (Sensor Payload) Final Design Review. Payload Name: G.A.M.B.L.S.
 Final Design Review. Payload Name: G.A.M.B.L.S.") NASA University Student Launch Initiative (Sensor Payload) Final Design Review Payload Name: G.A.M.B.L.S. CPE496-01 Computer Engineering Design II Electrical and Computer Engineering The University of
NASA University Student Launch Initiative (Sensor Payload) Final Design Review Payload Name: G.A.M.B.L.S. CPE496-01 Computer Engineering Design II Electrical and Computer Engineering The University of
Mars Surface Mobility Proposal
 Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
A Day in the Life of a Smart Campus
 A Day in the Life of a Smart Campus Clay Nesler VP, Global Energy & Sustainability Johnson Controls (clay.g.nesler@jci.com) 19 July 13 Typical Profile Smart Profile Electricity Price 8: PM 1: AM : AM 8:
A Day in the Life of a Smart Campus Clay Nesler VP, Global Energy & Sustainability Johnson Controls (clay.g.nesler@jci.com) 19 July 13 Typical Profile Smart Profile Electricity Price 8: PM 1: AM : AM 8:
Can You Light the Bulb?
 3-5 Physical Science Southern Nevada Regional Professional Development Program Can You Light the Bulb? INTRODUCTION Electrical energy is easily transferred through loops that we call circuits. This activity
3-5 Physical Science Southern Nevada Regional Professional Development Program Can You Light the Bulb? INTRODUCTION Electrical energy is easily transferred through loops that we call circuits. This activity
Modular Reconfigurable Spacecraft Small Rocket/Spacecraft Technology Platform SMART
 Modular Reconfigurable Spacecraft Small Rocket/Spacecraft Technology Platform SMART Micro-Spacecraft Prototype Demonstrates Modular Open Systems Architecture for Fast Life-Cycle Missions Jaime Esper *,
Modular Reconfigurable Spacecraft Small Rocket/Spacecraft Technology Platform SMART Micro-Spacecraft Prototype Demonstrates Modular Open Systems Architecture for Fast Life-Cycle Missions Jaime Esper *,
Industrial & Medical Power Solutions
 Industrial & Medical Power Solutions Industrial and medical power solutions for a wide variety of applications including high efficiency AC/ power supplies, / converters, on-board chargers, modular stationary
Industrial & Medical Power Solutions Industrial and medical power solutions for a wide variety of applications including high efficiency AC/ power supplies, / converters, on-board chargers, modular stationary
Wind Turbine Testing
 Wind Turbine Testing Why Test? Limited number of machines suitable for polar applications Identify the good and bad machines Identify the good and bad manufacturers Gain familiarity with the systems Decrease
Wind Turbine Testing Why Test? Limited number of machines suitable for polar applications Identify the good and bad machines Identify the good and bad manufacturers Gain familiarity with the systems Decrease
An Overview of CSA s s Space Robotics Activities
 An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
Solar Powered Wireless Sensors & Instrumentation
 Solar Powered Wireless Sensors & Instrumentation Energy Harvesting Technology Reduces Operating Cost at Remote Sites Speakers: Michael Macchiarelli Standards Certification Education & Training Publishing
Solar Powered Wireless Sensors & Instrumentation Energy Harvesting Technology Reduces Operating Cost at Remote Sites Speakers: Michael Macchiarelli Standards Certification Education & Training Publishing
An Autonomous Braking System of Cars Using Artificial Neural Network
 I J C T A, 9(9), 2016, pp. 3665-3670 International Science Press An Autonomous Braking System of Cars Using Artificial Neural Network P. Pavul Arockiyaraj and P.K. Mani ABSTRACT The main aim is to develop
I J C T A, 9(9), 2016, pp. 3665-3670 International Science Press An Autonomous Braking System of Cars Using Artificial Neural Network P. Pavul Arockiyaraj and P.K. Mani ABSTRACT The main aim is to develop
Dr. Chris Borroni-Bird, VP, Strategic Development, Qualcomm Technologies Incorporated. Enabling Connected and Electric Vehicles
 Dr. Chris Borroni-Bird, VP, Strategic Development, Qualcomm Technologies Incorporated Enabling Connected and Electric Vehicles 1 2 3 4 Introduction DSRC WEVC Summary Agenda 2 Multiple technologies intersect
Dr. Chris Borroni-Bird, VP, Strategic Development, Qualcomm Technologies Incorporated Enabling Connected and Electric Vehicles 1 2 3 4 Introduction DSRC WEVC Summary Agenda 2 Multiple technologies intersect
Autonomous / Unmanned Surface Vehicles And The Increased Efficiencies They Offer. James Hailstones, ASV, Ltd.
 Autonomous / Unmanned Surface Vehicles And The Increased Efficiencies They Offer James Hailstones, ASV, Ltd. Introduction Company ~70 employees worldwide. ASV established in 2010. ASV operations in USA
Autonomous / Unmanned Surface Vehicles And The Increased Efficiencies They Offer James Hailstones, ASV, Ltd. Introduction Company ~70 employees worldwide. ASV established in 2010. ASV operations in USA
Safety... Sometimes it can t be dependent on reflectivity alone. ATSSA s Proud Recipient
 Safety... Sometimes it can t be dependent on reflectivity alone. ATSSA s Proud Recipient The Problem Traffic Control professionals have long recognized that certain sign situations are more critically
Safety... Sometimes it can t be dependent on reflectivity alone. ATSSA s Proud Recipient The Problem Traffic Control professionals have long recognized that certain sign situations are more critically
Next Steps in Human Exploration: Cislunar Systems and Architectures
 Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Abstract #1756. English. French. Author(s) and Co Author(s) ispace & Team Hakuto s 2017 Lunar Mission
 and Co Author(s) ispace & Team Hakuto s 2017 Lunar Mission") 4/25/2017 CIM TPMS Abstract #1756 English ispace & Team Hakuto s 2017 Lunar Mission This presentation will introduce ispace, a lunar exploration company headquartered in Tokyo, Japan, and Team Hakuto,
4/25/2017 CIM TPMS Abstract #1756 English ispace & Team Hakuto s 2017 Lunar Mission This presentation will introduce ispace, a lunar exploration company headquartered in Tokyo, Japan, and Team Hakuto,
Canadian Lunar & Planetary Rover. Development
 Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Segway Robotic Mobility Platform (RMP) Specifications
 Specifications") Segway Robotic Mobility Platform (RMP) Specifications Proven Durability, Reliability, and Performance The Segway RMP takes the performance and engineering prowess demonstrated in the Segway Personal Transporter
Segway Robotic Mobility Platform (RMP) Specifications Proven Durability, Reliability, and Performance The Segway RMP takes the performance and engineering prowess demonstrated in the Segway Personal Transporter
Palamede, more than a microsatellite. Workshop on University Micro Satellites in Italy Rome, July 27, 2005
 Palamede, more than a microsatellite The Palamede Team (represented by Franco Bernelli and Roberto Armellin) Workshop on University Micro Satellites in Italy Rome, July 27, 2005 Outline Mission and educational
Palamede, more than a microsatellite The Palamede Team (represented by Franco Bernelli and Roberto Armellin) Workshop on University Micro Satellites in Italy Rome, July 27, 2005 Outline Mission and educational
Solar Based Wireless Grass Cutter
 IJSTE - International Journal of Science Technology & Volume 2 Issue 11 May 2016 ISSN (online): 2349-784X Solar Based Wireless Grass Cutter Vicky Jain Prashant Bagane Sagar Patil Prof.Mrs.S.S.Patil Abstract
IJSTE - International Journal of Science Technology & Volume 2 Issue 11 May 2016 ISSN (online): 2349-784X Solar Based Wireless Grass Cutter Vicky Jain Prashant Bagane Sagar Patil Prof.Mrs.S.S.Patil Abstract
REU: Improving Straight Line Travel in a Miniature Wheeled Robot
 THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
Compact Scales. Software Revision V1.25 & above
 Compact Scales Software Revision V1.25 & above 2016 1 Easy Reference: Model name of the scale: Serial number of the unit: Software revision number (Displayed when power is first turned on): Date of Purchase:
Compact Scales Software Revision V1.25 & above 2016 1 Easy Reference: Model name of the scale: Serial number of the unit: Software revision number (Displayed when power is first turned on): Date of Purchase:
Landing Targets and Technical Subjects for SELENE-2
 Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Design of High Power Cube Satellite Power System
 Design of High Power Cube Satellite Power System Paper Number SSC14-WK-26 Randy Rice Miltec Corporation, a Division of Ducommun Inc. http://www.ducommun.com/ducommunmiltec/ rrice@one.ducommun.com 2014
Design of High Power Cube Satellite Power System Paper Number SSC14-WK-26 Randy Rice Miltec Corporation, a Division of Ducommun Inc. http://www.ducommun.com/ducommunmiltec/ rrice@one.ducommun.com 2014
WIRELESS SMART TOW SYSTEM (3RD GENERATION)
") Wireless Smart Tow System (3rd Generation) TS0540 Page 1 The Tow Alarm System TS0540 is an integrated towing monitoring system. This system is capable of continuously monitoring data for display in the
Wireless Smart Tow System (3rd Generation) TS0540 Page 1 The Tow Alarm System TS0540 is an integrated towing monitoring system. This system is capable of continuously monitoring data for display in the
Battery Bank for Wind Turbine. Project Proposal Prash Ramani, Marcos Rived TA: Katherine O Kane
 Battery Bank for Wind Turbine Project Proposal Prash Ramani, Marcos Rived TA: Katherine O Kane Table of Contents: 1.0 Introduction.2 1.1 Statement of Purpose 1.1.0 Scope 1.1.1 Purpose 1.2 Objectives 1.2.1
Battery Bank for Wind Turbine Project Proposal Prash Ramani, Marcos Rived TA: Katherine O Kane Table of Contents: 1.0 Introduction.2 1.1 Statement of Purpose 1.1.0 Scope 1.1.1 Purpose 1.2 Objectives 1.2.1
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
2016 IGVC Design Report Submitted: May 13, 2016
 2016 IGVC Design Report Submitted: May 13, 2016 I certify that the design and engineering of the vehicle by the current student team has been significant and equivalent to what might be awarded credit
2016 IGVC Design Report Submitted: May 13, 2016 I certify that the design and engineering of the vehicle by the current student team has been significant and equivalent to what might be awarded credit
Cellwatch Battery Monitoring Systems
 Cellwatch Battery Monitoring Systems A battery can fail overnight leaving an entire power system without backup capability... So what did your batteries do today? If you want to know, read on... Cellwatch
Cellwatch Battery Monitoring Systems A battery can fail overnight leaving an entire power system without backup capability... So what did your batteries do today? If you want to know, read on... Cellwatch
Initial Project and Group Identification Document. Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle)
") Initial Project and Group Identification Document Project Idea: Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle) Team Members: Robertson Augustine (Computer Engineer)
Initial Project and Group Identification Document Project Idea: Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle) Team Members: Robertson Augustine (Computer Engineer)
AMSAT-NA FOX Satellite Program
 AMSAT-NA FOX Satellite Program Review, Status, and Future JERRY BUXTON, NØJY, AUTHOR AMSAT VP-ENGINEERING Review FOX-1 - WHY IT IS, WHAT IT IS Fox Development Strategy Take advantage of large and growing
AMSAT-NA FOX Satellite Program Review, Status, and Future JERRY BUXTON, NØJY, AUTHOR AMSAT VP-ENGINEERING Review FOX-1 - WHY IT IS, WHAT IT IS Fox Development Strategy Take advantage of large and growing
Solar Powered Golf Cart
 Solar Powered Golf Cart Group 9 Jake Bettis Jacob Krueger Matt Roland Matt Tourtelot Project Description The main objective of this project is to design and build a solar-powered, energy efficient electric
Solar Powered Golf Cart Group 9 Jake Bettis Jacob Krueger Matt Roland Matt Tourtelot Project Description The main objective of this project is to design and build a solar-powered, energy efficient electric
IEEE Technical Committee on RFID Distinguished Lecture
 IEEE Technical Committee on RFID Distinguished Lecture Energy Harvesting: Extending the Battery Life of Mobile Products Will Lumpkins, Sr. Member, Chair IEEE CRFID, Wi2Wi Inc. July 26 th 2014 Bio Will
IEEE Technical Committee on RFID Distinguished Lecture Energy Harvesting: Extending the Battery Life of Mobile Products Will Lumpkins, Sr. Member, Chair IEEE CRFID, Wi2Wi Inc. July 26 th 2014 Bio Will
Laser Tag Droid. Jake Hamill, Martin Litwiller, Christian Topete ECE 445 Project Proposal
 Laser Tag Droid Jake Hamill, Martin Litwiller, Christian Topete ECE 445 Project Proposal 1. Introduction 1.1 Objective Our proposed project is to design, build, and test a remote control laser tag droid
Laser Tag Droid Jake Hamill, Martin Litwiller, Christian Topete ECE 445 Project Proposal 1. Introduction 1.1 Objective Our proposed project is to design, build, and test a remote control laser tag droid
TC26-B Vehicle Sensor
 Section 1 General Description The Model TC26-B is a microprocessor controlled vehicle sensor with a variable range. It is designed to trigger the operation of a traffic controller. The TC26-B will only
Section 1 General Description The Model TC26-B is a microprocessor controlled vehicle sensor with a variable range. It is designed to trigger the operation of a traffic controller. The TC26-B will only
Sunseeker Sunseek Electrica Electric l a Systems 22 September 2009
 Sunseeker Electrical Systems 22 September 2009 Primary Systems There are four primary electrical systems Solar Array and Array DC to DC Converters Battery and Battery Protection System Drive Motors (Csiro)
Sunseeker Electrical Systems 22 September 2009 Primary Systems There are four primary electrical systems Solar Array and Array DC to DC Converters Battery and Battery Protection System Drive Motors (Csiro)
Abstract. Traditional airships have always been designed for robust operations with the ability to survive in
 ISTS 2000-k-15 DEVELOPMENT OF A SMALL STRATOSPHERIC STATION KEEPING BALLOON SYSTEM 1 Michael S. Smith Aerostar International, Inc. Sulphur Springs, Texas, USA E-mail: msmith@aerostar.com William D. Perry,
ISTS 2000-k-15 DEVELOPMENT OF A SMALL STRATOSPHERIC STATION KEEPING BALLOON SYSTEM 1 Michael S. Smith Aerostar International, Inc. Sulphur Springs, Texas, USA E-mail: msmith@aerostar.com William D. Perry,
 Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
ORBITAL EXPRESS Space Operations Architecture Program 17 th Annual AIAA/USU Conference on Small Satellites August 12, 2003
 ORBITAL EXPRESS Space Operations Architecture Program 17 th Annual AIAA/USU Conference on Small Satellites August 12, 2003 Major James Shoemaker, USAF, Ph.D. DARPA Orbital Express Space Operations Program
ORBITAL EXPRESS Space Operations Architecture Program 17 th Annual AIAA/USU Conference on Small Satellites August 12, 2003 Major James Shoemaker, USAF, Ph.D. DARPA Orbital Express Space Operations Program
FARM GROUP "THE FUTURE OF FARMING" ARC Automation. Research Corporation Autonomous Tractor Corporation
 FARM GROUP "THE FUTURE OF FARMING" ARC Automation Research Corporation THE AGRICULTURAL INDUSTRY HAS MANY CHALLENGES Increasing equipment costs Unable to repair the equipment Real storage of qualified
FARM GROUP "THE FUTURE OF FARMING" ARC Automation Research Corporation THE AGRICULTURAL INDUSTRY HAS MANY CHALLENGES Increasing equipment costs Unable to repair the equipment Real storage of qualified
Chapter 45 Adaptive Cars Headlamps System with Image Processing and Lighting Angle Control
 Chapter 45 Adaptive Cars Headlamps System with Image Processing and Lighting Angle Control William Tandy Prasetyo, Petrus Santoso and Resmana Lim Abstract The project proposed a prototype of an adaptive
Chapter 45 Adaptive Cars Headlamps System with Image Processing and Lighting Angle Control William Tandy Prasetyo, Petrus Santoso and Resmana Lim Abstract The project proposed a prototype of an adaptive
Power System Design for High Lattitudes and Wiring Best Practices
 Power System Design for High Lattitudes and Wiring Best Practices 2015 Polar Technology Conference, Denver, Colorado Tracy Dahl Polar Field Services tracy@polarfield.com Project Requirements and Constraints:
Power System Design for High Lattitudes and Wiring Best Practices 2015 Polar Technology Conference, Denver, Colorado Tracy Dahl Polar Field Services tracy@polarfield.com Project Requirements and Constraints:
Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers
 Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers Instructions You have just been notified that NASA is planning to launch another Mars Rover Mission and you are going to design
Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers Instructions You have just been notified that NASA is planning to launch another Mars Rover Mission and you are going to design
SMARTSat. Shape Memory Alloy Research Technology Satellite. Allison Barnard Alicia Broederdorf. Texas A&M University Space Engineering Institute
 SMARTSat Shape Memory Alloy Research Technology Satellite Allison Barnard Alicia Broederdorf Texas A&M University Space Engineering Institute Outline Introduction / Mission Objectives Systems Overview
SMARTSat Shape Memory Alloy Research Technology Satellite Allison Barnard Alicia Broederdorf Texas A&M University Space Engineering Institute Outline Introduction / Mission Objectives Systems Overview
Urban Mobility driving global megacities out of the jam. Lars Reger VP Strategy, New Business, R&D - NXP Semiconductors Hamburg, Feb.
 Urban Mobility driving global megacities out of the jam Lars Reger VP Strategy, New Business, R&D - NXP Semiconductors Hamburg, Feb. 2012 Global Trends - Challenges for Society Connected Mobility Growing
Urban Mobility driving global megacities out of the jam Lars Reger VP Strategy, New Business, R&D - NXP Semiconductors Hamburg, Feb. 2012 Global Trends - Challenges for Society Connected Mobility Growing
Platooning using p in SARTRE project Safe Road Train for the Environment
 Ricardo plc 2009 Platooning using 802.11p in SARTRE project Safe Road Train for the Environment Erik Nordin, Project Manager, Volvo GTT (Volvo Technology, VTEC) Dept: Vehicle Technology and Safety 2 Road
Ricardo plc 2009 Platooning using 802.11p in SARTRE project Safe Road Train for the Environment Erik Nordin, Project Manager, Volvo GTT (Volvo Technology, VTEC) Dept: Vehicle Technology and Safety 2 Road
The Evolution of Vertical Wind Technology
 The Evolution of Vertical Wind Technology EOW-300 EOW-200 EOW-100 Copy right BE-WIND LLC. Manufacturing/Assembled in the USA Offices in Texas / Florida / Nicaragua / Germany / UK Introduction: Thank you
The Evolution of Vertical Wind Technology EOW-300 EOW-200 EOW-100 Copy right BE-WIND LLC. Manufacturing/Assembled in the USA Offices in Texas / Florida / Nicaragua / Germany / UK Introduction: Thank you
Lunar Architecture and LRO
 Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Traffic Logix SafePace 100 Radar Speed Sign Product Specifications Version 2.7
 Traffic Logix SafePace 100 Radar Speed Sign Product Specifications Version 2.7 1 Table of Contents Dimensions... 3 Technical Specifications... 4 Communication... 5 Programming... 6 Data Collection and
Traffic Logix SafePace 100 Radar Speed Sign Product Specifications Version 2.7 1 Table of Contents Dimensions... 3 Technical Specifications... 4 Communication... 5 Programming... 6 Data Collection and
Long Reach WiFi Link: A joint EsLaRed-ICTP effort
 Long Reach WiFi Link: A joint EsLaRed-ICTP effort ICTP-ITU School on Wireless Networking for Scientific Applications in Developing Countries Abdus Salam ICTP, Triest, February 2007 Ermanno Pietrosemoli
Long Reach WiFi Link: A joint EsLaRed-ICTP effort ICTP-ITU School on Wireless Networking for Scientific Applications in Developing Countries Abdus Salam ICTP, Triest, February 2007 Ermanno Pietrosemoli
Lunar Robotics. Dr. Rob Ambrose, NASA JSC December Dr. Robert O. Ambrose
 Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
Traffic Logix SafePace 450 Radar Speed Sign
 Traffic Logix SafePace 450 Radar Speed Sign Product Specifications Dimensions Digit: 15.0 (h) x 8.0 (w), 112 LEDs per digit Text: o Full Size: Letters 6.0 (h) spell YOUR SPEED fixed message, 2 lines o
Traffic Logix SafePace 450 Radar Speed Sign Product Specifications Dimensions Digit: 15.0 (h) x 8.0 (w), 112 LEDs per digit Text: o Full Size: Letters 6.0 (h) spell YOUR SPEED fixed message, 2 lines o
기계시스템해석 System Dynamics/System Analysis
 기계시스템해석 System Dynamics/System Analysis Spring 2015 Professor Kyongsu Yi 2015 VDCL Vehicle Dynamics Control Laboratory Department of Mechanical Engineering Seoul National University Introduction Instructor:
기계시스템해석 System Dynamics/System Analysis Spring 2015 Professor Kyongsu Yi 2015 VDCL Vehicle Dynamics Control Laboratory Department of Mechanical Engineering Seoul National University Introduction Instructor:
FALL SEMESTER MECE 407 INNOVATIVE ENGINEERING ANALYSIS AND DESIGN PROJECT TOPICS
 2016-2017 FALL SEMESTER MECE 407 INNOVATIVE ENGINEERING ANALYSIS AND DESIGN PROJECT TOPICS 1- Design, construction and control of a cart-inverted pendulum control system: - There will be a cart and an
2016-2017 FALL SEMESTER MECE 407 INNOVATIVE ENGINEERING ANALYSIS AND DESIGN PROJECT TOPICS 1- Design, construction and control of a cart-inverted pendulum control system: - There will be a cart and an
RB-Mel-03. SCITOS G5 Mobile Platform Complete Package
 RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
Resource Prospector Traverse Planning
 Resource Prospector Traverse Planning Jennifer Heldmann (NASA Ames / NASA Headquarters) Anthony Colaprete (NASA Ames Research Center) Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters)
Resource Prospector Traverse Planning Jennifer Heldmann (NASA Ames / NASA Headquarters) Anthony Colaprete (NASA Ames Research Center) Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters)
Li-Ion Charge Balancing and Cell Voltage Monitoring for Performance and Safety
 Li-Ion Charge Balancing and Cell Voltage Monitoring for Performance and Safety 2010 Advanced Energy Conference Thomas Mazz Program Manager Aeroflex Inc. Outline / Objectives of this talk Basic advantages
Li-Ion Charge Balancing and Cell Voltage Monitoring for Performance and Safety 2010 Advanced Energy Conference Thomas Mazz Program Manager Aeroflex Inc. Outline / Objectives of this talk Basic advantages
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science
 Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Alan Kilian Spring Design and construct a Holonomic motion platform and control system.
 Alan Kilian Spring 2007 Design and construct a Holonomic motion platform and control system. Introduction: This project is intended as a demonstration of my skills in four specific areas: Power system
Alan Kilian Spring 2007 Design and construct a Holonomic motion platform and control system. Introduction: This project is intended as a demonstration of my skills in four specific areas: Power system
SOLAR LIGHTING CONTROLLER SUNLIGHT MODELS INCLUDED IN THIS MANUAL SL-10 SL-10-24V SL-20 SL-20-24V
 SOLAR LIGHTING CONTROLLER OPERATOR S MANUAL SUNLIGHT MODELS INCLUDED IN THIS MANUAL SL-10 SL-10-24V SL-20 SL-20-24V 10A / 12V 10A / 24V 20A / 12V 20A / 24V 1098 Washington Crossing Road Washington Crossing,
SOLAR LIGHTING CONTROLLER OPERATOR S MANUAL SUNLIGHT MODELS INCLUDED IN THIS MANUAL SL-10 SL-10-24V SL-20 SL-20-24V 10A / 12V 10A / 24V 20A / 12V 20A / 24V 1098 Washington Crossing Road Washington Crossing,
SMART BUILDINGS AND ENERGY EFFICIENCY
 SMART BUILDINGS AND ENERGY EFFICIENCY Invited Lecture Professor Saifur Rahman, PhD Virginia Tech, USA ABES Engineering College, Ghaziabad, India, 08 March 2018 From Smart Buildings to Smart Grid Smart
SMART BUILDINGS AND ENERGY EFFICIENCY Invited Lecture Professor Saifur Rahman, PhD Virginia Tech, USA ABES Engineering College, Ghaziabad, India, 08 March 2018 From Smart Buildings to Smart Grid Smart
Curiosity lands on Mars
 Curiosity lands on Mars Early Monday morning (August 6, 2012), the Mars rover named Curiosity successfully landed on the surface of Mars. The rover launched on November 26 th, 2011 and traveled for 8 ½
Curiosity lands on Mars Early Monday morning (August 6, 2012), the Mars rover named Curiosity successfully landed on the surface of Mars. The rover launched on November 26 th, 2011 and traveled for 8 ½
GEM Green Energy in Motion CLEAN MOBILE SCALABLE ENERGY SOLUTION
 GEM Green Energy in Motion CLEAN MOBILE SCALABLE ENERGY SOLUTION 2 AKUO ENERGY - ENTREPRENEUR BY NATURE Independant Power Producer (IPP) More than 1GW in operation. Cumulative investment of 2.1 billion
GEM Green Energy in Motion CLEAN MOBILE SCALABLE ENERGY SOLUTION 2 AKUO ENERGY - ENTREPRENEUR BY NATURE Independant Power Producer (IPP) More than 1GW in operation. Cumulative investment of 2.1 billion
Prototyping Collision Avoidance for suas
 Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
UniverSOL Charge Station
 UniverSOL Charge Station Group 17 Jonathan German Amy Parkinson John Curristan Brock Stoops Sponsored by Motivations Environmental Renewable Energy Carbon Emissions Power Demand Power Dependency Availability
UniverSOL Charge Station Group 17 Jonathan German Amy Parkinson John Curristan Brock Stoops Sponsored by Motivations Environmental Renewable Energy Carbon Emissions Power Demand Power Dependency Availability
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
WHITE PAPER. Solar Tailers. Considerations for their Design in a Mining Environment
 WHITE PAPER Solar Tailers Considerations for their Design in a Mining Environment Table of Contents I. Introduction 3 II. Traditional Wireless Network Design 3 III. 3D-P s Network Design Philosophy 3 IV.
WHITE PAPER Solar Tailers Considerations for their Design in a Mining Environment Table of Contents I. Introduction 3 II. Traditional Wireless Network Design 3 III. 3D-P s Network Design Philosophy 3 IV.
The requirements for unmanned aircraft operating in oil, gas and mineral exploration and production
 AUVSI Unmanned Systems North America 2013 Conference August 14, 2013 The requirements for unmanned aircraft operating in oil, gas and mineral exploration and production Dr Joseph Barnard joseph.barnard@barnardmicrosystems.com
AUVSI Unmanned Systems North America 2013 Conference August 14, 2013 The requirements for unmanned aircraft operating in oil, gas and mineral exploration and production Dr Joseph Barnard joseph.barnard@barnardmicrosystems.com
UAV KF-1 helicopter. CopterCam UAV KF-1 helicopter specification
 UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
Status & evolutions of Telemetry Services for Profiling Floats. Brice Robert Patrick Bradley (CLS America)
") Status & evolutions of Telemetry Services for Profiling Floats Brice Robert brobert@cls.fr Patrick Bradley (CLS America) pbradley@clsamerica.fr COMPANY PROFILE CLS is a subsidiary of the French Space Agency
Status & evolutions of Telemetry Services for Profiling Floats Brice Robert brobert@cls.fr Patrick Bradley (CLS America) pbradley@clsamerica.fr COMPANY PROFILE CLS is a subsidiary of the French Space Agency
Project Narrative Description
 0 Project Narrative Description Charge Spot is intended to demonstrate the feasibility of an autonomous electric vehicle charging system for residential use. The goal of Charge Spot is to have no user
0 Project Narrative Description Charge Spot is intended to demonstrate the feasibility of an autonomous electric vehicle charging system for residential use. The goal of Charge Spot is to have no user
MAX310 BEESMART SOLAR MICRO INVERTER 260 COMMUNICATION GATEWAY Apparent Power Control (APC)
") MAX310 BEESMART SOLAR MICRO INVERTER 260 COMMUNICATI GATEWAY Apparent Power Control (APC) P Q unique micro inverter with REAL & REACTIVE POWER CTROL 2 Micro Inverters unique micro inverter with real &
MAX310 BEESMART SOLAR MICRO INVERTER 260 COMMUNICATI GATEWAY Apparent Power Control (APC) P Q unique micro inverter with REAL & REACTIVE POWER CTROL 2 Micro Inverters unique micro inverter with real &
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Investigative Technologies and Techniques
 Investigative Technologies and Techniques Using Drones In Accident Investigation (Aerial Photography) Drone used in accident investigation Technical specifications and performance Flat 8 motor configuration
Investigative Technologies and Techniques Using Drones In Accident Investigation (Aerial Photography) Drone used in accident investigation Technical specifications and performance Flat 8 motor configuration
Localised smart energy systems in homes
 meet maslow. smart energy storage for your solar powered home. www.meetmaslow.com www.moixatechnology.com Localised smart energy systems in homes Smart Systems Summit 2014 London at the IoD, 1-2 October
meet maslow. smart energy storage for your solar powered home. www.meetmaslow.com www.moixatechnology.com Localised smart energy systems in homes Smart Systems Summit 2014 London at the IoD, 1-2 October
HYSYS System Components for Hybridized Fuel Cell Vehicles
 HYSYS System Components for Hybridized Fuel Cell Vehicles J. Wind, A. Corbet, R.-P. Essling, P. Prenninger, V. Ravello This document appeared in Detlef Stolten, Thomas Grube (Eds.): 18th World Hydrogen
HYSYS System Components for Hybridized Fuel Cell Vehicles J. Wind, A. Corbet, R.-P. Essling, P. Prenninger, V. Ravello This document appeared in Detlef Stolten, Thomas Grube (Eds.): 18th World Hydrogen
Closing Sale Prices. AmigoBot Pioneer 3-DX Pioneer 3-AT Pioneer LX Pioneer Manipulator PeopleBot PowerBot Seekur Jr
 10 Columbia Drive Amherst, NH 03031 USA T. +1.603.881.7960 F. +1.603.881.3818 www.mobilerobots.com Closing Prices 90 Day Warranty on all s Limited Quantities Available Models AmigoBot Pioneer 3-DX Pioneer
10 Columbia Drive Amherst, NH 03031 USA T. +1.603.881.7960 F. +1.603.881.3818 www.mobilerobots.com Closing Prices 90 Day Warranty on all s Limited Quantities Available Models AmigoBot Pioneer 3-DX Pioneer
Electrical Energy Engineering Program EEE
 Faculty of Engineering Cairo University Credit Hours System Electrical Energy Engineering Program EEE June 2018 Electrical Engineers: What they do? Electrical engineers specify, design and supervise the
Faculty of Engineering Cairo University Credit Hours System Electrical Energy Engineering Program EEE June 2018 Electrical Engineers: What they do? Electrical engineers specify, design and supervise the
The VisLab Intercontinental Autonomous Challenge: 13,000 km, 3 months, no driver
 The VisLab Intercontinental Autonomous Challenge: 13,000 km, 3 months, no driver M.Bertozzi, L.Bombini, A.Broggi, M.Buzzoni, E.Cardarelli, S.Cattani, P.Cerri, S.Debattisti,. R.I.Fedriga, M.Felisa, L.Gatti,
The VisLab Intercontinental Autonomous Challenge: 13,000 km, 3 months, no driver M.Bertozzi, L.Bombini, A.Broggi, M.Buzzoni, E.Cardarelli, S.Cattani, P.Cerri, S.Debattisti,. R.I.Fedriga, M.Felisa, L.Gatti,
Journal of Emerging Trends in Computing and Information Sciences
 Pothole Detection Using Android Smartphone with a Video Camera 1 Youngtae Jo *, 2 Seungki Ryu 1 Korea Institute of Civil Engineering and Building Technology, Korea E-mail: 1 ytjoe@kict.re.kr, 2 skryu@kict.re.kr
Pothole Detection Using Android Smartphone with a Video Camera 1 Youngtae Jo *, 2 Seungki Ryu 1 Korea Institute of Civil Engineering and Building Technology, Korea E-mail: 1 ytjoe@kict.re.kr, 2 skryu@kict.re.kr
The World Leader in High Performance Signal Processing Solutions Automotive Webinar
 The World Leader in High Performance Signal Processing Solutions Automotive Webinar October, 2013 Making Tomorrow s Cars Better Safer Protect; Prevent; Predict Mark Gill VP Automotive Greener Hybrid, electric,
The World Leader in High Performance Signal Processing Solutions Automotive Webinar October, 2013 Making Tomorrow s Cars Better Safer Protect; Prevent; Predict Mark Gill VP Automotive Greener Hybrid, electric,
USING OF dspace DS1103 FOR ELECTRIC VEHICLE POWER CONSUMPTION MODELING
 USING OF dspace DS1103 FOR ELECTRIC VEHICLE POWER CONSUMPTION MODELING T. Haubert, J. Bauer, P. Mindl Czech Technical University in Prague, Faculty of El. Engineering, Dept. of El. Drives and Traction
USING OF dspace DS1103 FOR ELECTRIC VEHICLE POWER CONSUMPTION MODELING T. Haubert, J. Bauer, P. Mindl Czech Technical University in Prague, Faculty of El. Engineering, Dept. of El. Drives and Traction
Station for Exploratory Analysis and Research Center for Humanity (SEARCH)
") Station for Exploratory Analysis and Research Center for Humanity (SEARCH) Authors: Jasmine Wong, Matthew Decker, Joseph Lewis, Megerditch Arabian, and Dr. Peter Bishay California State University, Northridge
Station for Exploratory Analysis and Research Center for Humanity (SEARCH) Authors: Jasmine Wong, Matthew Decker, Joseph Lewis, Megerditch Arabian, and Dr. Peter Bishay California State University, Northridge
The European Lunar Lander Mission
 The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
Rocketry Projects Conducted at the University of Cincinnati
 Rocketry Projects Conducted at the University of Cincinnati 2009-2010 Grant Schaffner, Ph.D. (Advisor) Rob Charvat (Student) 17 September 2010 1 Spacecraft Design Course Objectives Students gain experience
Rocketry Projects Conducted at the University of Cincinnati 2009-2010 Grant Schaffner, Ph.D. (Advisor) Rob Charvat (Student) 17 September 2010 1 Spacecraft Design Course Objectives Students gain experience
Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics: Results and Roadmaps
 National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
Power Management Chip. Anthony Kanago Valerie Barry Benjamin Sprague John Sandmeyer
 mmax Power Management Chip Anthony Kanago Valerie Barry Benjamin Sprague John Sandmeyer 1 Outline Design Goals and Challenges Power Management IC Design Maximum Power Point Tracking (MPPT) Implementation
mmax Power Management Chip Anthony Kanago Valerie Barry Benjamin Sprague John Sandmeyer 1 Outline Design Goals and Challenges Power Management IC Design Maximum Power Point Tracking (MPPT) Implementation