Planetary Surface Transportation and Site Development
|
|
|
- Dorcas Francis
- 5 years ago
- Views:
Transcription
1 Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX This paper presents considerations and concepts for planning surface mobility systems and site development scenarios for the Moon and Mars. Reference concepts for multipurpose rovers, means to land them, and an operational site development implementation sequence are also illustrated. Surface mobility and operations under reduced gravity planetary conditions pose special challenges. Among these, an ability for the prime mover or rover to develop necessary surface traction to pull or push massive habitat modules or other large elements is especially problematic. The surface mobility systems must also be sufficiently versatile and robust to accomplish diverse scientific and site development tasks, potentially including services as drilling rigs, crew and cargo transport carriers, cranes and mobile power line development vehicles. Design proposals illustrate how such needs and functions can be accomplished. I. Introduction Any surface transportation and base deployment strategy must optimize all systems and operations for diverse and difficult conditions (Figures 1 and 2): Environmental Influences : - Systems should be designed to accommodate rough/ hilly terrain features at all candidate sites without requiring a large inventory of equipment. - Extremely cold temperatures will degrade battery power efficiency/ life, and long lunar nights will exacerbate this condition. - Reduced gravity will limit wheel traction, and dust will cause friction and degrade mechanical functions. Figure 1. SICSA Reference Module Concept. Operational Influences: - Large parts and accessories will be difficult to change out/ repair under EVA conditions. - Systems must be versatile to meet diverse and changing evolutionary mission requirements. - Offloading of modules/ cargo from carriers must be made as simple and safe as possible. - Launch and delivery of all devices to the site should apply a universal transportation strategy. Figure 2. SICSA Base Reference Concept. * Professor/Director, SICSA, University of Houston, 122 College of Architecture Bldg, Houston, TX 77204, AIAA Associate Fellow. 1

2 II. Rover Manifesting for Launch and Deployment Rover planning must consider launch manifesting influences on surface landing and deployment (Figure 3): Scheme A assumes a horizontal bolognaslice payload orientation : - If the payload carrier lands in a vertical orientation, landing loads will act on wheels/ shelves, and means must be provided to lower the stacks. - If the payload carrier lands horizontally, loads will act on a platform end, and rovers must tip down. Scheme B assumes a vertical manifest (platforms aligned with the launch axis) : - If the carrier lands in the original launch orientation, loads will act upon a platform end and rovers must tip down for offloading. - If the carrier lands horizontally, impact loads will act through wheels and the rovers must download from the stacks. Figure 3. Manifesting and Landing/ Deployment. III. Energy Storage, Maneuverability and Traction Rover design must consider energy and cargo storage capacity for long traverses, maneuverability on rough/ hilly surfaces, and ability to achieve adequate traction (Figure 4): Platform geometry must be correlated with launch manifesting and influences upon available platform area/ volume for energy storage and payloads: - Given that batteries and other payloads are most likely to be rectilinear, a square shape (Scheme A) might be most ideal. Individual unit and fleet maneuverability might utilize variable power applied to fixed wheels or steerable wheels (possibly individually powered and controlled) : - Steerable wheels may offer maneuvering advantages for some fleet applications. Traction will be determined by vehicle loaded mass, contact surfaces and wheel/ track design : - More wheels may often provide more contact surface and contact occurrences. Figure 4. Platform and Wheel Options. 2
3 IV. Payload Transfers and Positioning SICSA considered 4 different element approaches for moving and positioning large items such as modules and logistics carriers (Figure 5): Option A Tow Winches with Lock-down : - Multiple rovers might be outfitted with power winches that pull wheeled cargo items after the rovers lock-down with anchoring devices, eliminating a need for wheel traction. Option B Rovers with Cargo Carriers : - Payloads would be placed on one or more rover beds to optimize traction, but large items would need offloading means, potentially requiring cranes or other massive equipment. Option C Rovers Attached to Landing/Support Structures: - Payloads would be supported by individual rover platforms at each corner with real-time operational coordination and maneuvering, an approach which can be perilous on uneven surfaces. Option D Ganged Towing Rovers: - This approach would depend upon total rover mass and wheel contact to develop sufficient traction, potentially requiring many units. Figure 5. Design and Operational Approaches. V. The Tow Winch Approach The tow winch scheme was selected as a reference design approach to enable a pair of relatively small rovers to move and position modules and other large elements under low-gravity conditions that greatly reduce wheel traction (Figure 6): Winch spindle cables are attached to the wheeled module through automated or crew-assisted interfaces. The two rovers advance forward along a pathway that avoids large rocks and other surface barriers, and then anchor themselves in place. Winches are used to pull and align the module along the pathway, and the procedure is repeated. Figure 6. Winch Towing Approach. 3

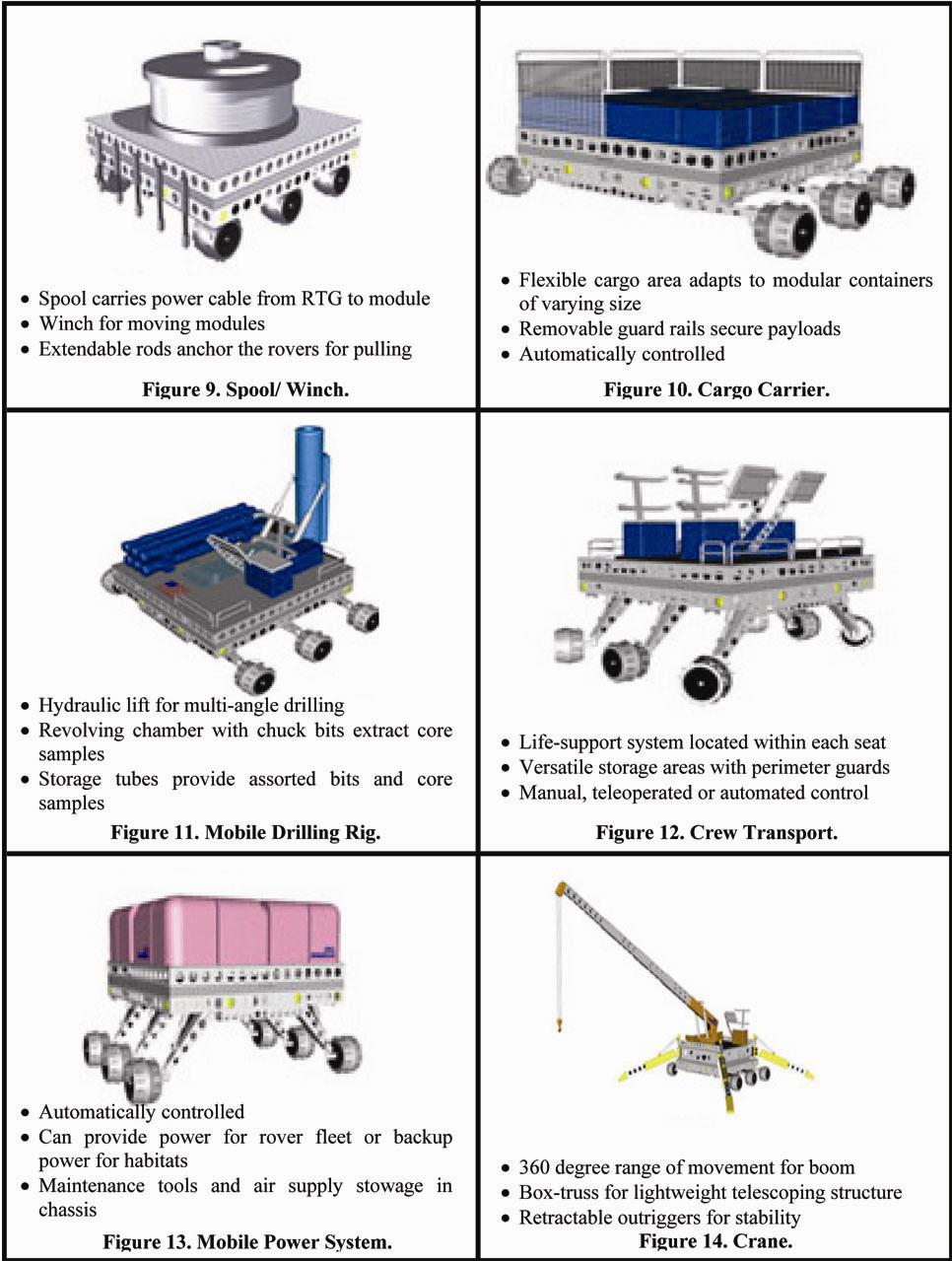
4 The tow winch approach offers a variety of important advantages (Figure 7): Minimization of rover size and numbers : - The lockdown feature makes the system much less dependant upon rover mass for pulling traction than other wheeled or track alternatives, reducing rover transport launch, transfer and landing costs. - Smaller, lighter rovers will be more power efficient, enabling longer traverses with larger payloads. - More rover units can be delivered within a given transportation payload budget, enabling functional versatility and redundancy. Optimization of Capabilities : - The rover winches can be used to deploy electrical cables between the base and a nuclear power source located a safe distance away. - A standard rover platform can be outfitted with cranes, drilling rigs and other useful equipment. Figure 7. Surface Module Relocation. VI. Multipurpose Rover Platform SICSA has conceptualized a multipurpose rover platform that can be adapted for a variety of functions using augmentation devices (Figures 8-14): All applications sue a common wheeled platform system that incorporates battery power and automation/ telerobotic control systems. In most cases, the functional augmentation devices are installed on the platforms prior to launch/ landing, and are too large to be change out on the surface by EVA crews. Multiple units can be launched together within a 12 ft. diameter rocket shroud. SICSA has investigated ways to deliver rovers and other large logistics payloads to lunar/mars surfaces in support of human missions. Figure 8. Logistics Carrier with Rovers. 4
5 5 \
6 VII. Initial Base Development Scenario A scenario for establishing initial planetary base operating capabilities is outlined in four general stages that follow (Figures 15-17): Stage 1 : A pressure system is landed and deployed: 1. An unpressurized logistics carrier lands and delivers a RTG power source, 2 rovers with winches, and a crew rover. 1A. Rovers are automatically deployed and the 2nd winch rover in a 2-rover train dispenses a power until the spool is depleted at a power interface junction. 1B. The winch rovers reverse order, and the full spool winch dispenses remaining cable to the destination site. 1C. The spent winch rovers park at the destination site with power connections to the RTG. 1D. The crew rover automatically proceeds to the power interface junction, parks and recharges. Figure 15. Stage 1: Power is Established. Stage 2 : The first module is landed at the site. -The module parks unmanned at the end of the power line leading from the RTG. Stage 3 : The first 4-person crew arrives at a different landing site at a safe distance from the module. 3A. The crew rover leaves the power interface charging station and automatically tracks to the crew landing site. 3B. The crew departs on the rover and proceeds to the module site to connect the power cable and set up/ check out operational capabilities. Figure 16. Stages 2 & 3:1st Module Set-up/employment. 6

7 Stage 4 : A second hab module which also carries logistics supplies lands at a new site. 4A. All rovers recharge at the site of the first module. 4B. The rovers with tow winches proceed to the power interface and recharge. 4C. Two of the crew members depart on the crew rover to the 2nd module. 4D. The tow winch rovers are automatically dispatched to rendezvous with the crew at the 2nd module and winch cables are attached to the module. 4E. The winch rovers tow the 2nd module to the site of the 1st module, and the crew onboard their rover control operations. 4F. The full crew participates in positioning the 2nd module into a berthing alignment with the 1st, check out interfaces, and complete operational readiness procedures. Figure 17. Stage 4: Operational Status. VIII. Radiation Shielding Considerations A variety of lunar habitat shielding concepts have been proposed to take advantage of natural geologic features and surface materials for radiation protection: Putting modules in underground lava tubes. Tunneling into crater walls. Covering facilities with 50 centimeters or more of lunar soil (regolith). (Figure 18) Each of these proposed approaches present significant problems: Use of lava tubes will severely limit site selection and development options. Tunneling or material transfer to cover modules will require large, automated equipment, and it will be difficult or impossible to connect other modules later. Figure 18. Early SICSA Concept Using Bagged Regoltih for Radiation Shielding. 7

8 As shown in Figure 19, use of regolith radiation shielding is not recommended for lunar/ Mars surface habitat applications: The amount of material that would have to be excavated, moved and emplaced exceeds capabilities of equipment that would be practical to launch, transfer and land. After a module is covered, it would be unimaginably difficult to connect another for evolutionary growth. Very long EVA tunnels would be required to enable access/ egress at points beyond regolith slope angles. Flexible tunnels and other inflatable structures would be collapsed by loads in the event of temporary pressure losses. Outside viewing would be prevented due to material obstruction. Figure 19. Regolith Shielding Problems. References The assumptions, concepts and conclusions presented in this paper are based upon numerous design studies conducted by the Sasakawa International Center for Space Architecture (SICSA). Related and supportive reports can be accessed on SICSA s website: All reports are available free of charge to interested parties. 8
Lunar Architecture and LRO
 Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Mars Surface Mobility Proposal
 Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
NEXT Exploration Science and Technology Mission. Relevance for Lunar Exploration
 NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
Human Exploration of the Lunar Surface
 International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, GMT
 Friday, October 30, GMT") Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
From MARS To MOON. V. Giorgio Director of Italian Programs. Sorrento, October, All rights reserved, 2007, Thales Alenia Space
 From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
Analysis of Architectures for Long-Range Crewed Moon and Mars Surface Mobility
 AIAA SPACE 2008 Conference & Exposition 9-11 September 2008, San Diego, California AIAA 2008-7914 Analysis of Architectures for Long-Range Crewed Moon and Mars Surface Mobility Wilfried K. Hofstetter 1,
AIAA SPACE 2008 Conference & Exposition 9-11 September 2008, San Diego, California AIAA 2008-7914 Analysis of Architectures for Long-Range Crewed Moon and Mars Surface Mobility Wilfried K. Hofstetter 1,
MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region
 MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region David Willson (david.willson@au.tenovagroup.com) and Jonathan D. A. Clarke (jon.clarke@bigpond.com), Mars Society Australia The centrepiece
MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region David Willson (david.willson@au.tenovagroup.com) and Jonathan D. A. Clarke (jon.clarke@bigpond.com), Mars Society Australia The centrepiece
Next Steps in Human Exploration: Cislunar Systems and Architectures
 Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science
 Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
An Overview of CSA s s Space Robotics Activities
 An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE
 LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE ABSTRACT With 1 rover, 2 astronauts and 3 days, the Apollo 17 Mission covered over 30 km, setup
LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE ABSTRACT With 1 rover, 2 astronauts and 3 days, the Apollo 17 Mission covered over 30 km, setup
Industrial-and-Research Lunar Base
 Industrial-and-Research Lunar Base STRATEGY OF LUNAR BASE CREATION Phase 1 Preparatory: creation of international cooperation, investigation of the Moon by unmanned spacecraft, creation of space transport
Industrial-and-Research Lunar Base STRATEGY OF LUNAR BASE CREATION Phase 1 Preparatory: creation of international cooperation, investigation of the Moon by unmanned spacecraft, creation of space transport
Light-Lift Rocket II
 Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration
 National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
Cygnus Payload Accommodations: Supporting ISS Utilization
 The Space Congress Proceedings 2018 (45th) The Next Great Steps Feb 27th, 1:30 PM Cygnus Payload Accommodations: Supporting ISS Utilization Frank DeMauro Vice President and General Manager, Advanced Programs
The Space Congress Proceedings 2018 (45th) The Next Great Steps Feb 27th, 1:30 PM Cygnus Payload Accommodations: Supporting ISS Utilization Frank DeMauro Vice President and General Manager, Advanced Programs
Plug-in Hardware Concepts for Mobile Modular Surface Habitats
 Howe, A.S. & Howe, J.W. (2005). Plug-in Hardware Concepts for Mobile Modular Surface Habitats AIAA- 2005-2673. The 1st Exploration Conference: Continuing the Voyage of Discovery, Orlando, Florida, 30 Jan
Howe, A.S. & Howe, J.W. (2005). Plug-in Hardware Concepts for Mobile Modular Surface Habitats AIAA- 2005-2673. The 1st Exploration Conference: Continuing the Voyage of Discovery, Orlando, Florida, 30 Jan
Canadian Lunar & Planetary Rover. Development
 Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Two Related Primary Challenges for Successful Renewed Lunar Exploration
 Two Related Primary Challenges for Successful Renewed Lunar Exploration October 10, 2017 Presented By Ron Creel Retired Apollo Lunar Roving Vehicle Team Member OUTLINE Challenge 1 Coping with Exposure
Two Related Primary Challenges for Successful Renewed Lunar Exploration October 10, 2017 Presented By Ron Creel Retired Apollo Lunar Roving Vehicle Team Member OUTLINE Challenge 1 Coping with Exposure
Martin J. L. Turner. Expedition Mars. Published in association with. Chichester, UK
 Martin J. L. Turner Expedition Mars Springer Published in association with Praxis Publishing Chichester, UK Contents Preface Acknowledgements List of illustrations, colour plates and tables xi xv xvii
Martin J. L. Turner Expedition Mars Springer Published in association with Praxis Publishing Chichester, UK Contents Preface Acknowledgements List of illustrations, colour plates and tables xi xv xvii
Lunar Escape. Astronaut Rescue and Recovery Rover. Members: Mohammad Alzohay, Dan Janke, Kyle Kilgore, Samad Qureshi, Nicholas Wade-Mayhue
 Lunar Escape Astronaut Rescue and Recovery Rover Members: Mohammad Alzohay, Dan Janke, Kyle Kilgore, Samad Qureshi, Nicholas Wade-Mayhue Lunar Escape 1 Little Astronaut, Big Planet Lunar Escape 2 Moon
Lunar Escape Astronaut Rescue and Recovery Rover Members: Mohammad Alzohay, Dan Janke, Kyle Kilgore, Samad Qureshi, Nicholas Wade-Mayhue Lunar Escape 1 Little Astronaut, Big Planet Lunar Escape 2 Moon
Mars 2018 Mission Status and Sample Acquisition Issues
 Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
Massachusetts Space Grant Consortium
 Massachusetts Space Grant Consortium Distinguished Lecturer Series NASA Administrator Dr. Michael Griffin NASA s Exploration Architecture March 8, 2006 Why We Explore Human curiosity Stimulates our imagination
Massachusetts Space Grant Consortium Distinguished Lecturer Series NASA Administrator Dr. Michael Griffin NASA s Exploration Architecture March 8, 2006 Why We Explore Human curiosity Stimulates our imagination
Notes: GENERAL DYNAMICS EARLY LUNAR ACCESS [1993]
![Notes: GENERAL DYNAMICS EARLY LUNAR ACCESS [1993]](/thumbs/88/115730710.jpg "Notes: GENERAL DYNAMICS EARLY LUNAR ACCESS [1993]") Notes: file:///f /SPACE Misc/Lunar Explore/Lunar Do...NERAL DYNAMICS EARLY LUNAR ACCESS [1993].htm (1 of 8) [17/03/2005 9:35:03 p.m.] 1.INTRODUCTION EARLY LUNAR ACCESS (ELA) was a "cheaperfasterbetter"
Notes: file:///f /SPACE Misc/Lunar Explore/Lunar Do...NERAL DYNAMICS EARLY LUNAR ACCESS [1993].htm (1 of 8) [17/03/2005 9:35:03 p.m.] 1.INTRODUCTION EARLY LUNAR ACCESS (ELA) was a "cheaperfasterbetter"
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE
 INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
OMOTENASHI. (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor)
") SLS EM-1 secondary payload OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) The smallest moon lander launched by the most powerful rocket in the world * Omotenashi
SLS EM-1 secondary payload OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) The smallest moon lander launched by the most powerful rocket in the world * Omotenashi
Lunar Robotics. Dr. Rob Ambrose, NASA JSC December Dr. Robert O. Ambrose
 Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
IN DECEMBER 2006, NASA published their initial plan [1] for a
![IN DECEMBER 2006, NASA published their initial plan [1] for a](/thumbs/94/120292950.jpg "IN DECEMBER 2006, NASA published their initial plan [1] for a") JOURNAL OF SPACECRAFT AND ROCKETS Vol. 46, No. 2, March April 2009 Analysis of Human Lunar Outpost Strategies and Architectures Wilfried K. Hofstetter, Paul D. Wooster, and Edward F. Crawley Massachusetts
JOURNAL OF SPACECRAFT AND ROCKETS Vol. 46, No. 2, March April 2009 Analysis of Human Lunar Outpost Strategies and Architectures Wilfried K. Hofstetter, Paul D. Wooster, and Edward F. Crawley Massachusetts
Extending NASA s Exploration Systems Architecture towards Longterm Crewed Moon and Mars Operations
 SpaceOps 2006 Conference AIAA 2006-5746 Extending NASA s Exploration Systems Architecture towards Longterm Crewed Moon and Mars Operations Wilfried K. Hofstetter *, Paul D. Wooster, Edward F. Crawley Massachusetts
SpaceOps 2006 Conference AIAA 2006-5746 Extending NASA s Exploration Systems Architecture towards Longterm Crewed Moon and Mars Operations Wilfried K. Hofstetter *, Paul D. Wooster, Edward F. Crawley Massachusetts
Exploration Architecture Update
 Exploration Architecture Update Doug Cooke Deputy Associate Administrator Exploration Systems Mission Directorate John Connolly Vehicle Engineering and Integration Lunar Lander Project Office March 14,
Exploration Architecture Update Doug Cooke Deputy Associate Administrator Exploration Systems Mission Directorate John Connolly Vehicle Engineering and Integration Lunar Lander Project Office March 14,
CHANGING ENTRY, DESCENT, AND LANDING PARADIGMS FOR HUMAN MARS LANDER
 National Aeronautics and Space Administration CHANGING ENTRY, DESCENT, AND LANDING PARADIGMS FOR HUMAN MARS LANDER Alicia Dwyer Cianciolo NASA Langley Research Center 2018 International Planetary Probe
National Aeronautics and Space Administration CHANGING ENTRY, DESCENT, AND LANDING PARADIGMS FOR HUMAN MARS LANDER Alicia Dwyer Cianciolo NASA Langley Research Center 2018 International Planetary Probe
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES
 FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
Gravity Control Technologies Phase I - Unmanned Prototype
 archived as http://www.stealthskater.com/documents/gct_02.pdf read more of GCT at http://www.stealthskater.com/ufo.htm#gct note: because important websites are frequently "here today but gone tomorrow",
archived as http://www.stealthskater.com/documents/gct_02.pdf read more of GCT at http://www.stealthskater.com/ufo.htm#gct note: because important websites are frequently "here today but gone tomorrow",
Lunette: A Global Network of Small Lunar Landers
 Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Routine Scheduled Space Access For Secondary Payloads
 SSC10-IX-8 Routine Scheduled Space Access For Secondary Jason Andrews, President and CEO, and Jeff Cannon, Senior Systems Engineer, Spaceflight Services, Inc. Tukwila, WA 98168 Telephone: 206.342.9934
SSC10-IX-8 Routine Scheduled Space Access For Secondary Jason Andrews, President and CEO, and Jeff Cannon, Senior Systems Engineer, Spaceflight Services, Inc. Tukwila, WA 98168 Telephone: 206.342.9934
WhirliGig Transfer Vehicle for motor-driven, restartable A.G. Tom Sullivan June, 2002
 WhirliGig Transfer Vehicle for motor-driven, restartable A.G. Tom Sullivan June, 2002 Thrusters (notional) Prop tanks, Ar Rankine Engines (3) Rxtr Radiator, both sides ~25 m Side view 4-5 m Flow of potassium
WhirliGig Transfer Vehicle for motor-driven, restartable A.G. Tom Sullivan June, 2002 Thrusters (notional) Prop tanks, Ar Rankine Engines (3) Rxtr Radiator, both sides ~25 m Side view 4-5 m Flow of potassium
The Intermediate Outpost - An Alternate Concept for Human Lunar Exploration
 AIAA SPACE 2007 Conference & Exposition 18-20 September 2007, Long Beach, California AIAA 2007-6274 The Intermediate Outpost - An Alternate Concept for Human Lunar Exploration Wilfried K. Hofstetter *,
AIAA SPACE 2007 Conference & Exposition 18-20 September 2007, Long Beach, California AIAA 2007-6274 The Intermediate Outpost - An Alternate Concept for Human Lunar Exploration Wilfried K. Hofstetter *,
lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow
 lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow John Connolly Lunar Lander Project Office 1 Components of Program Constellation Earth Departure Stage Ares V - Heavy
lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow John Connolly Lunar Lander Project Office 1 Components of Program Constellation Earth Departure Stage Ares V - Heavy
RIMRES: A project summary
 RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
Lunar and Mars Mission Analysis and Design Using Commercial Launch Systems and the International Space Station
 1 Lunar and Mars Mission Analysis and Design Using Commercial Launch Systems and the International Space Station ARCH 7610: Master s Project Space Architecture ARCH 6398: Special Projects David Smitherman
1 Lunar and Mars Mission Analysis and Design Using Commercial Launch Systems and the International Space Station ARCH 7610: Master s Project Space Architecture ARCH 6398: Special Projects David Smitherman
The 22M Class Aerostat: Increased Capabilities for the Small Tethered Aerostat Surveillance System
 11th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, including the AIA 20-22 September 2011, Virginia Beach, VA AIAA 2011-7069 The 22M Class Aerostat: Increased Capabilities for
11th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, including the AIA 20-22 September 2011, Virginia Beach, VA AIAA 2011-7069 The 22M Class Aerostat: Increased Capabilities for
neuron An efficient European cooperation scheme
 DIRECTION GÉNÉRALE INTERNATIONALE January, 2012 neuron An efficient European cooperation scheme I - INTRODUCTION 2 II - AIM OF THE neuron PROGRAMME 3 III - PROGRAMME ORGANISATION 4 IV - AN EFFICIENT EUROPEAN
DIRECTION GÉNÉRALE INTERNATIONALE January, 2012 neuron An efficient European cooperation scheme I - INTRODUCTION 2 II - AIM OF THE neuron PROGRAMME 3 III - PROGRAMME ORGANISATION 4 IV - AN EFFICIENT EUROPEAN
The Role of Electric Propulsion in a Flexible Architecture for Space Exploration
 The Role of Electric Propulsion in a Flexible Architecture for Space Exploration IEPC-2011-210 Presented at the 32nd International Electric Propulsion Conference, Wiesbaden Germany C. Casaregola 1, D.
The Role of Electric Propulsion in a Flexible Architecture for Space Exploration IEPC-2011-210 Presented at the 32nd International Electric Propulsion Conference, Wiesbaden Germany C. Casaregola 1, D.
Soviet Lunokhod 1 and 2 missions and things around
 Soviet Lunokhod 1 and 2 missions and things around Alexander Basilevsky Vernadsky Institute of Geochemistry and Analytical Chemistry Russian Academy of Sciences, Moscow, Russia and Department of Geological
Soviet Lunokhod 1 and 2 missions and things around Alexander Basilevsky Vernadsky Institute of Geochemistry and Analytical Chemistry Russian Academy of Sciences, Moscow, Russia and Department of Geological
IAC-07- A3.I.A.19 A VALUE PROPOSITION FOR LUNAR ARCHITECTURES UTILIZING PROPELLANT RE-SUPPLY CAPABILITIES
 IAC-7- A3.I.A.19 A VALUE PROPOSITION FOR LUNAR ARCHITECTURES UTILIZING PROPELLANT RE-SUPPLY CAPABILITIES James Young Georgia Institute of Technology, United States of America James_Young@ae.gatech.edu
IAC-7- A3.I.A.19 A VALUE PROPOSITION FOR LUNAR ARCHITECTURES UTILIZING PROPELLANT RE-SUPPLY CAPABILITIES James Young Georgia Institute of Technology, United States of America James_Young@ae.gatech.edu
Name: Space Exploration PBL
 Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Jay Gundlach AIAA EDUCATION SERIES. Manassas, Virginia. Joseph A. Schetz, Editor-in-Chief. Blacksburg, Virginia. Aurora Flight Sciences
 Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
BIMODAL NUCLEAR THERMAL ROCKET (BNTR) PROPULSION FOR FUTURE HUMAN MARS EXPLORATION MISSIONS
 PROPULSION FOR FUTURE HUMAN MARS EXPLORATION MISSIONS") BIMODAL NUCLEAR THERMAL ROCKET (BNTR) PROPULSION FOR FUTURE HUMAN MARS EXPLORATION MISSIONS Stan Borowski National Aeronautics and Space Administration Glenn Research Center Cleveland, Ohio Bimodal Nuclear
BIMODAL NUCLEAR THERMAL ROCKET (BNTR) PROPULSION FOR FUTURE HUMAN MARS EXPLORATION MISSIONS Stan Borowski National Aeronautics and Space Administration Glenn Research Center Cleveland, Ohio Bimodal Nuclear
BIMODAL NUCLEAR THERMAL ROCKET (BNTR) PROPULSION FOR FUTURE HUMAN MARS EXPLORATION MISSIONS
 PROPULSION FOR FUTURE HUMAN MARS EXPLORATION MISSIONS") BIMODAL NUCLEAR THERMAL ROCKET (BNTR) PROPULSION FOR FUTURE HUMAN MARS EXPLORATION MISSIONS Stan Borowski National Aeronautics and Space Administration Glenn Research Center Cleveland, Ohio Bimodal Nuclear
BIMODAL NUCLEAR THERMAL ROCKET (BNTR) PROPULSION FOR FUTURE HUMAN MARS EXPLORATION MISSIONS Stan Borowski National Aeronautics and Space Administration Glenn Research Center Cleveland, Ohio Bimodal Nuclear
Utilizing Lunar Architecture Transportation Elements for Mars Exploration
 Utilizing Lunar Architecture Transportation Elements for Mars Exploration 19 September 2007 Brad St. Germain, Ph.D. Director of Advanced Concepts brad.stgermain@sei.aero 1+770.379.8010 1 Introduction Architecture
Utilizing Lunar Architecture Transportation Elements for Mars Exploration 19 September 2007 Brad St. Germain, Ph.D. Director of Advanced Concepts brad.stgermain@sei.aero 1+770.379.8010 1 Introduction Architecture
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
Lunar Driving Simulator History
 1 of 20 Lunar Driving Simulator History Early NASA MSFC/Northrop MOLAB Concept. This vehicle concept evolved from the study contract NAS8-11096 in support of the early Apollo Logistic Support System studies
1 of 20 Lunar Driving Simulator History Early NASA MSFC/Northrop MOLAB Concept. This vehicle concept evolved from the study contract NAS8-11096 in support of the early Apollo Logistic Support System studies
The GHOST of a Chance for SmallSat s (GH2 Orbital Space Transfer) Vehicle
 Vehicle") The GHOST of a Chance for SmallSat s (GH2 Orbital Space Transfer) Vehicle Dr. Gerard (Jake) Szatkowski United launch Alliance Project Mngr. SmallSat Accommodations Bernard Kutter United launch Alliance
The GHOST of a Chance for SmallSat s (GH2 Orbital Space Transfer) Vehicle Dr. Gerard (Jake) Szatkowski United launch Alliance Project Mngr. SmallSat Accommodations Bernard Kutter United launch Alliance
This appendix describes various types of equipment that can
 Appendix GENERAL ENGINEER SUPPORT EQUIPMENT This appendix describes various types of equipment that can be used to support general engineer missions. This information is provided to help planners choose
Appendix GENERAL ENGINEER SUPPORT EQUIPMENT This appendix describes various types of equipment that can be used to support general engineer missions. This information is provided to help planners choose
MARTIAN HABITAT DESIGN
 MARTIAN HABITAT DESIGN MARS OR BUST, INC. UNIVERSITY OF COLORADO, BOULDER AEROSPACE ENGINEERING SCIENCES ASEN 4158/5158 MOB DECEMBER 17, 2003 TABLE OF CONTENTS 1 MISSION SUMMARY... 8 1.1 CONTEXT OF THIS
MARTIAN HABITAT DESIGN MARS OR BUST, INC. UNIVERSITY OF COLORADO, BOULDER AEROSPACE ENGINEERING SCIENCES ASEN 4158/5158 MOB DECEMBER 17, 2003 TABLE OF CONTENTS 1 MISSION SUMMARY... 8 1.1 CONTEXT OF THIS
Design of Power Systems for Extensible Surface Mobility Systems on the Moon and Mars
 Design of Power Systems for Extensible Surface Mobility Systems on the Moon and Mars by SeungBum Hong B.S. in Mechanical and Aerospace Engineering, Seoul National University (2002) Submitted to the Department
Design of Power Systems for Extensible Surface Mobility Systems on the Moon and Mars by SeungBum Hong B.S. in Mechanical and Aerospace Engineering, Seoul National University (2002) Submitted to the Department
NASA Perspectives on the Importance of Reform in Electric Energy Systems Education
 NASA Perspectives on the Importance of Reform in Electric Energy Systems Education Reforming Electric Energy Systems Curriculum With Emphasis on Renewable/Storage, Smart Delivery, and Efficient End-Use
NASA Perspectives on the Importance of Reform in Electric Energy Systems Education Reforming Electric Energy Systems Curriculum With Emphasis on Renewable/Storage, Smart Delivery, and Efficient End-Use
ASTRIUM. Lunar Lander Concept for LIFE. Hansjürgen Günther TOB 11. Bremen, 23/
 Lunar Lander Concept for LIFE Hansjürgen Günther TOB 11 Bremen, 23/24.11.2006 This document is the property of EADS SPACE. It shall not be communicated to third parties without prior written agreement.its
Lunar Lander Concept for LIFE Hansjürgen Günther TOB 11 Bremen, 23/24.11.2006 This document is the property of EADS SPACE. It shall not be communicated to third parties without prior written agreement.its
MOONBUGGY REPORT. Submitted by Galgotias College of Engineering and Technology Team 1 1, Knowledge Park-2 Greater Noida, Uttar Pradesh INDIA
 MOONBUGGY REPORT Submitted by Galgotias College of Engineering and Technology Team 1 1, Knowledge Park-2 Greater Noida, Uttar Pradesh INDIA TEAM DETAILS Our Moonbuggy design consists of its suspension
MOONBUGGY REPORT Submitted by Galgotias College of Engineering and Technology Team 1 1, Knowledge Park-2 Greater Noida, Uttar Pradesh INDIA TEAM DETAILS Our Moonbuggy design consists of its suspension
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012
 Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Analysis of Launch and Earth Departure Architectures for Near-Term Human Mars Missions
 Analysis of Launch and Earth Departure Architectures for Near-Term Human Mars Missions Wilfried K. Hofstetter 1, Arthur Guest 2, Ryan McLinko 3 and Edward F. Crawley 4 MIT Department of Aeronautics and
Analysis of Launch and Earth Departure Architectures for Near-Term Human Mars Missions Wilfried K. Hofstetter 1, Arthur Guest 2, Ryan McLinko 3 and Edward F. Crawley 4 MIT Department of Aeronautics and
Innovative Mars exploration rover using inflatable or unfolding wheels
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return
 Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
SPACE STATIONS USING THE SKYLON LAUNCH SYSTEM
 IAC-10.B3.7.3 SPACE STATIONS USING THE SKYLON LAUNCH SYSTEM Mark Hempsell Reaction Engines Ltd Building D5,Culham Science Centre, Abingdon, Oxon, OX14 3DB United Kingdom mark.hempsell@reactionengines.co.uk
IAC-10.B3.7.3 SPACE STATIONS USING THE SKYLON LAUNCH SYSTEM Mark Hempsell Reaction Engines Ltd Building D5,Culham Science Centre, Abingdon, Oxon, OX14 3DB United Kingdom mark.hempsell@reactionengines.co.uk
John Klaus Robert Cooper Thilina Fernando Zoe Morozko
 Faculty Advisors: Dr. Dan Kirk Greg Peebles Justin Treptow Alex Morrese Alexis Mendez Casselle Russell John Klaus Robert Cooper Thilina Fernando Zoe Morozko Paul Martin Ben Burnett Damian Harasiuk 1 Launch
Faculty Advisors: Dr. Dan Kirk Greg Peebles Justin Treptow Alex Morrese Alexis Mendez Casselle Russell John Klaus Robert Cooper Thilina Fernando Zoe Morozko Paul Martin Ben Burnett Damian Harasiuk 1 Launch
NEW 4 ALL TRACKS, 4 ALL CONDITIONS.
 NEW 4 ALL TRACKS, 4 ALL CONDITIONS. A FULL LINE-UP OF GO-ANYWHERE VEHICLES UNLIMITED VERSATILITY, EXTREME ROBUSTNESS AND ULTIMATE DRIVING COMFORT IN EVERY MISSION The extensive line-up of the Daily 4x4
NEW 4 ALL TRACKS, 4 ALL CONDITIONS. A FULL LINE-UP OF GO-ANYWHERE VEHICLES UNLIMITED VERSATILITY, EXTREME ROBUSTNESS AND ULTIMATE DRIVING COMFORT IN EVERY MISSION The extensive line-up of the Daily 4x4
The Design of an Omnidirectional All-Terrain Rover Chassis
 The Design of an Omnidirectional All-Terrain Rover Chassis Abstract Submission for TePRA 2011: the 3rd Annual IEEE International Conference on Technologies for Practical Robot Applications Timothy C. Lexen,
The Design of an Omnidirectional All-Terrain Rover Chassis Abstract Submission for TePRA 2011: the 3rd Annual IEEE International Conference on Technologies for Practical Robot Applications Timothy C. Lexen,
The Common Spacecraft Bus and Lunar Commercialization
 The Common Spacecraft Bus and Lunar Commercialization Alex MacDonald NASA Ames Research Center alex.macdonald@balliol.ox.ac.uk Will Marshall NASA Ames Research Center william.s.marshall@nasa.gov Summary
The Common Spacecraft Bus and Lunar Commercialization Alex MacDonald NASA Ames Research Center alex.macdonald@balliol.ox.ac.uk Will Marshall NASA Ames Research Center william.s.marshall@nasa.gov Summary
Case Study: ParaShield
 Case Study: ParaShield Origin of ParaShield Concept ParaShield Flight Test Wind Tunnel Testing Future Applications U N I V E R S I T Y O F MARYLAND 2012 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu
Case Study: ParaShield Origin of ParaShield Concept ParaShield Flight Test Wind Tunnel Testing Future Applications U N I V E R S I T Y O F MARYLAND 2012 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu
IAC-10-A5.1.6 A POWER ARCHITECTURE FOR THE ISECG REFERENCE ARCHITECTURE FOR HUMAN LUNAR EXPLORATION. M. Haese ESA, The Netherlands,
 IAC-10-A5.1.6 A POWER ARCHITECTURE FOR THE ISECG REFERENCE ARCHITECTURE FOR HUMAN LUNAR EXPLORATION M. Haese ESA, The Netherlands, marc.haese@esa.int Pat George NASA Glenn Research Center, USA, patrick.j.george@nasa.gov
IAC-10-A5.1.6 A POWER ARCHITECTURE FOR THE ISECG REFERENCE ARCHITECTURE FOR HUMAN LUNAR EXPLORATION M. Haese ESA, The Netherlands, marc.haese@esa.int Pat George NASA Glenn Research Center, USA, patrick.j.george@nasa.gov
Travel: Detailed Flight Plan
 DarkSide Logistics Lunar Spaceport Initiative Travel: Detailed Flight Plan The payload will be launched from Cape Canaveral Air Force Station Launch Complex 46 at 15:59:35 ET on January 25, 2010, using
DarkSide Logistics Lunar Spaceport Initiative Travel: Detailed Flight Plan The payload will be launched from Cape Canaveral Air Force Station Launch Complex 46 at 15:59:35 ET on January 25, 2010, using
Formation Flying Experiments on the Orion-Emerald Mission. Introduction
 Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Station for Exploratory Analysis and Research Center for Humanity (SEARCH)
") Station for Exploratory Analysis and Research Center for Humanity (SEARCH) Authors: Jasmine Wong, Matthew Decker, Joseph Lewis, Megerditch Arabian, and Dr. Peter Bishay California State University, Northridge
Station for Exploratory Analysis and Research Center for Humanity (SEARCH) Authors: Jasmine Wong, Matthew Decker, Joseph Lewis, Megerditch Arabian, and Dr. Peter Bishay California State University, Northridge
Coupled Aero-Structural Modelling and Optimisation of Deployable Mars Aero-Decelerators
 Coupled Aero-Structural Modelling and Optimisation of Deployable Mars Aero-Decelerators Lisa Peacocke, Paul Bruce and Matthew Santer International Planetary Probe Workshop 11-15 June 2018 Boulder, CO,
Coupled Aero-Structural Modelling and Optimisation of Deployable Mars Aero-Decelerators Lisa Peacocke, Paul Bruce and Matthew Santer International Planetary Probe Workshop 11-15 June 2018 Boulder, CO,
ENGINE COMPANY OPERATIONS AND ASSIGNMENTS
 SOG 1-3 ENGINE COMPANY OPERATIONS AND ASSIGNMENTS A. Scope: This operational guideline shall be utilized for Engine Company Operations. Firefighters must possess the skills required to fulfill their designated
SOG 1-3 ENGINE COMPANY OPERATIONS AND ASSIGNMENTS A. Scope: This operational guideline shall be utilized for Engine Company Operations. Firefighters must possess the skills required to fulfill their designated
ReachMars 2024 A Candidate Large-Scale Technology Demonstration Mission as a Precursor to Human Mars Exploration
 ReachMars 2024 A Candidate Large-Scale Technology Demonstration Mission as a Precursor to Human Mars Exploration 1 October 2014 Toronto, Canada Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
ReachMars 2024 A Candidate Large-Scale Technology Demonstration Mission as a Precursor to Human Mars Exploration 1 October 2014 Toronto, Canada Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
- Rugged - Durable - Reliable - Versatile
 HENDRICKSON Military Suspension Product Line - Rugged - Durable - Reliable - Versatile To learn more about Military Suspension Products, call 630.910.2800 or visit www.hendrickson-defense.com Across the
HENDRICKSON Military Suspension Product Line - Rugged - Durable - Reliable - Versatile To learn more about Military Suspension Products, call 630.910.2800 or visit www.hendrickson-defense.com Across the
Affordable Human Moon and Mars Exploration through Hardware Commonality
 Space 2005 30 August - 1 September 2005, Long Beach, California AIAA 2005-6757 Affordable Human Moon and Mars Exploration through Hardware Commonality Wilfried K. Hofstetter *, Paul D. Wooster., William
Space 2005 30 August - 1 September 2005, Long Beach, California AIAA 2005-6757 Affordable Human Moon and Mars Exploration through Hardware Commonality Wilfried K. Hofstetter *, Paul D. Wooster., William
Orbital Test Stand. By Mary Begay, Brett Booen, Calvin Boothe, James Ellis and Nicholas Garcia. Team 7. Project Proposal Document
 Orbital Test Stand By Mary Begay, Brett Booen, Calvin Boothe, James Ellis and Nicholas Garcia Team 7 Project Proposal Document Submitted towards partial fulfillment of the requirements for Mechanical Engineering
Orbital Test Stand By Mary Begay, Brett Booen, Calvin Boothe, James Ellis and Nicholas Garcia Team 7 Project Proposal Document Submitted towards partial fulfillment of the requirements for Mechanical Engineering
Europa Lander. Mission Concept Update 3/29/2017
 Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
A Cost Benefit Analysis of Faster Transmission System Protection Schemes and Ground Grid Design
 A Cost Benefit Analysis of Faster Transmission System Protection Schemes and Ground Grid Design Presented at the 2018 Transmission and Substation Design and Operation Symposium Revision presented at the
A Cost Benefit Analysis of Faster Transmission System Protection Schemes and Ground Grid Design Presented at the 2018 Transmission and Substation Design and Operation Symposium Revision presented at the
On Orbit Refueling: Supporting a Robust Cislunar Space Economy
 On Orbit Refueling: Supporting a Robust Cislunar Space Economy Courtesy of NASA 3 April 2017 Copyright 2014 United Launch Alliance, LLC. All Rights Reserved. Atlas V Launch History ULA s Vision: Unleashing
On Orbit Refueling: Supporting a Robust Cislunar Space Economy Courtesy of NASA 3 April 2017 Copyright 2014 United Launch Alliance, LLC. All Rights Reserved. Atlas V Launch History ULA s Vision: Unleashing
2a. Excavating and Lifting
 Construction Methods 110401542 2a. Excavating and Lifting Dr. Khaled Hyari Department of Civil Engineering Hashemite University Introduction Excavator: A power-driven digging machine Three Major types
Construction Methods 110401542 2a. Excavating and Lifting Dr. Khaled Hyari Department of Civil Engineering Hashemite University Introduction Excavator: A power-driven digging machine Three Major types
Mobile Surface Systems in a Moonbase System of Systems
 Mobile Surface Systems in a Moonbase System of Systems Robert Howard, Edward Tunstel, Dane Elliott-Lewis, Horace Bussey, Jasmine Bridges, Christianna Taylor NSBE Space Special Interest Group NSBE-Alumni
Mobile Surface Systems in a Moonbase System of Systems Robert Howard, Edward Tunstel, Dane Elliott-Lewis, Horace Bussey, Jasmine Bridges, Christianna Taylor NSBE Space Special Interest Group NSBE-Alumni
Chassis Concepts for the ExoMars Rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
Lunar Surface Access from Earth-Moon L1/L2 A novel lander design and study of alternative solutions
 Lunar Surface Access from Earth-Moon L1/L2 A novel lander design and study of alternative solutions 28 November 2012 Washington, DC Revision B Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
Lunar Surface Access from Earth-Moon L1/L2 A novel lander design and study of alternative solutions 28 November 2012 Washington, DC Revision B Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
The 38M Aerostat: A New System for Surveillance
 AIAA 5th Aviation, Technology, Integration, and Operations Conference (ATIO) 26-28 September 2005, Arlington, Virginia AIAA 2005-7443 The 38M Aerostat: A New System for Surveillance John A. Krausman *
AIAA 5th Aviation, Technology, Integration, and Operations Conference (ATIO) 26-28 September 2005, Arlington, Virginia AIAA 2005-7443 The 38M Aerostat: A New System for Surveillance John A. Krausman *
TECHNICAL INFORMATION M150 HEAVY GROUND MOBILITY SYSTEM
 TECHNICAL INFORMATION M150 HEAVY GROUND MOBILITY SYSTEM M150 TRACKWAY FAUN Trackway M150 Trackway solutions derives from our original Military Load Classification (MLC) 70 Trackway. Due to MLC70 having
TECHNICAL INFORMATION M150 HEAVY GROUND MOBILITY SYSTEM M150 TRACKWAY FAUN Trackway M150 Trackway solutions derives from our original Military Load Classification (MLC) 70 Trackway. Due to MLC70 having
 Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
Challenges of Designing the MarsNEXT Network
 Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
July 28, ULA Rideshare Capabilities
 July 28, 2011 ULA Rideshare Capabilities Jake Szatkowski Business Development & Advanced Programs Copyright 2011 United Launch Alliance, LLC. All Rights Reserved. Rideshare Missions ULA's family of ependable
July 28, 2011 ULA Rideshare Capabilities Jake Szatkowski Business Development & Advanced Programs Copyright 2011 United Launch Alliance, LLC. All Rights Reserved. Rideshare Missions ULA's family of ependable
Space Architecture. Master s Thesis Project Jain, Abhishek Dec. 2 nd, 2013
 Space Architecture Master s Thesis Project Jain, Abhishek Dec. 2 nd, 2013 Contents Catalog design for medium lift launch vehicles Catalog application Mission architecture - Lagrange point L2 mission L2
Space Architecture Master s Thesis Project Jain, Abhishek Dec. 2 nd, 2013 Contents Catalog design for medium lift launch vehicles Catalog application Mission architecture - Lagrange point L2 mission L2
Upper Stage Evolution
 Upper Stage Evolution Mark Wilkins Atlas Product Line VP United Launch Alliance AIAA_JPC080309 Copyright 2009 United Launch Alliance, LLC. All Rights Reserved. EELV Sustainment Through 2030 ULA s Evolution
Upper Stage Evolution Mark Wilkins Atlas Product Line VP United Launch Alliance AIAA_JPC080309 Copyright 2009 United Launch Alliance, LLC. All Rights Reserved. EELV Sustainment Through 2030 ULA s Evolution
Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil
 Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil By Brian Edwards, Vehicle Dynamics Group, Pratt and Miller Engineering, USA 22 Engineering Reality Magazine Multibody Dynamics
Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil By Brian Edwards, Vehicle Dynamics Group, Pratt and Miller Engineering, USA 22 Engineering Reality Magazine Multibody Dynamics
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity
 The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
Reentry Demonstration Plan of Flare-type Membrane Aeroshell for Atmospheric Entry Vehicle using a Sounding Rocket
 AIAA ADS Conference 2011 in Dublin 1 Reentry Demonstration Plan of Flare-type Membrane Aeroshell for Atmospheric Entry Vehicle using a Sounding Rocket Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki
AIAA ADS Conference 2011 in Dublin 1 Reentry Demonstration Plan of Flare-type Membrane Aeroshell for Atmospheric Entry Vehicle using a Sounding Rocket Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki
A LEO Propellant Depot System Concept for Outgoing Exploration
 A LEO Propellant Depot System Concept for Outgoing Exploration Dallas Bienhoff The Boeing Company 703-414-6139 NSS ISDC Dallas, Texas May 25-28, 2007 First, There was the Vision... Page 1 Then, the ESAS
A LEO Propellant Depot System Concept for Outgoing Exploration Dallas Bienhoff The Boeing Company 703-414-6139 NSS ISDC Dallas, Texas May 25-28, 2007 First, There was the Vision... Page 1 Then, the ESAS
Rover - Remote Operated Vehicle for Extraction and Reconnaissance
 IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 9, Issue 4 (Nov. - Dec. 2013), PP 38-42 Rover - Remote Operated Vehicle for Extraction and Reconnaissance
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 9, Issue 4 (Nov. - Dec. 2013), PP 38-42 Rover - Remote Operated Vehicle for Extraction and Reconnaissance
International Initiatives for Supporting Repatriation and Recycling of Disused Sealed Radioactive Sources (DSRS) in Member States
 in Member States") International Initiatives for Supporting Repatriation and Recycling of Disused Sealed Radioactive Sources (DSRS) in Member States Kate Roughan IAEA Nuclear Energy, Fuel Cycle and Waste Technology Waste
International Initiatives for Supporting Repatriation and Recycling of Disused Sealed Radioactive Sources (DSRS) in Member States Kate Roughan IAEA Nuclear Energy, Fuel Cycle and Waste Technology Waste