EUROBOT EVA-assistant robot for ISS
|
|
|
- Chastity Rice
- 5 years ago
- Views:
Transcription
 D. Buffa, R. Boaretto, (Alenia Spazio) C.")
1 In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 EUROBOT EVA-assistant robot for ISS Ph. Schoonejans, F. Didot, R. Stott, A. Jain (ESA) D. Buffa, R. Boaretto, (Alenia Spazio) C. Heemskerk (Dutch Space) 1 1
2 Presentation Overview EUROBOT Mission Objectives & Task Requirements Modes of Operation System Breakdown Mobile Segment Configurations Under Trade-Off Tools Panoply ORU & I/F Panoply Home Base Life after ISS applications for Exploration Project Schedule Conclusion 2 2
3 Objectives EUROBOT Motivations: Reduce the amount of crew time required for ISS external maintenance Reduce EVA sortie duration & numbers Surgical model: human = surgeon, Eurobot = nurse EUROBOT Tasks Requirements: EVA worksite preparation & closing tasks (2 EVAs in 1) EVA co-operative task (2 EVAs in 1) EVA sortie substitute: Orbital Replacement Unit (ORU) installation / exchange Payload servicing/ maintenance 3 3
4 Tasks Requirements Deployment from Home-Base Locomotion & Transportation self-relocate to specified location (using handrails & / or other standard external ISS I/Fs) TRANSPORT ORU/ payload (hold in 1 hand) while relocating Prepare EVA worksite Support EVA sortie (lighting worksite, monitoring, temporary stowage for ORUs, tools ) Close-up inspection and monitoring Safing / Keep-Alive / Maintenance RECHARGE at Home-Base docking station enter SAFE / STAND-BY / DORMANT state (stand-by & dormant at docking station) 4 4
5 Modes of Operation Modes of Operation: Autonomous for all well structured/ repeatable/ tasks such as: Deployment, locomotion & transportation to worksite Worksite preparation prior to EVA sortie: foot-restraint installation, camera / lighting set-up, carrying tools-set EVR compatible ORUs exchange Manual for less structured/ predictable tasks: EVA/ EUROBOT choreography while at worksite Local inspection for troubleshooting 5 5
6 System Breakdown EUROBOT Flight Segment ISS Station Mobile Segment System Dociking Station System IVA Crew Operator Station System Flight Suport Equipment System Gd Station MCC EUROBOT Ground Segment Monitoring & Command Station System Training, Operations Support & Simulation System WET Model System Maintenance & Verifcation incl. 1g Model (TBC) System 6 6
7 System Configuration Trade-off ongoing for different configurations Key issues Large number of handling I/Fs to deal with Large number of actuation I/Fs to deal with Difficult to choose between many configuration options Home base location Charging station (TBC) location(s) Wireless communications Thermal Constraints Ingress/egress through airlock 7 7
 with 7 joints Back cap (Tool Backpack) holds end effectors / tools 8 8")
8 Initial ESA Baseline Configuration Front view One central cylindrical body with two rotating caps Back view Front cap (Head) is equipped with camera and lighting unit Three identical limbs (arms / legs) with 7 joints Back cap (Tool Backpack) holds end effectors / tools 8 8
9 Configuration-1 Under Trade 3 identical arms of 1 meter each Each arm with 7 d.o.f Symmetrically mounted at 120 degrees around the body Initial PRR configuration 9 9
 on pan & tilt unit on central body (not visible in picture) 10")
10 Configuration-2 Under Trade 3 identical arms of 1 meter each Each arm with 7 d.o.f, with camera & lighting Symmetrically at 120 degrees around the body Set of cameras mounted (2 mono or 1 stereo) on pan & tilt unit on central body (not visible in picture) 10 10
11 Configuration-2 Under Trade EUROBOT size/reach compared to EVA 11 11
12 Configuration-3 Under Trade 2 identical arms of 1 meter each 1 stronger leg arm Each arm with 7 d.o.f 2 arms symmetrically mounted 2 cameras mounted on central body, on pan & tilt unit 12 12
13 Configuration-4 Under Trade Identical arms of 1 meter each 1 stronger leg arm Each arm with 7 d.o.f 2 symmetrically mounted arms Same concept as 3- but different head and arms 13 13

14 Configuration-5 Under Trade Identical arms of 1 meter each Each arm with 7 d.o.f 2 symmetrically mounted arms Camera on top End effector storage on belly Removable battery 14 14
15 Configuration-5 Under Trade 15 15
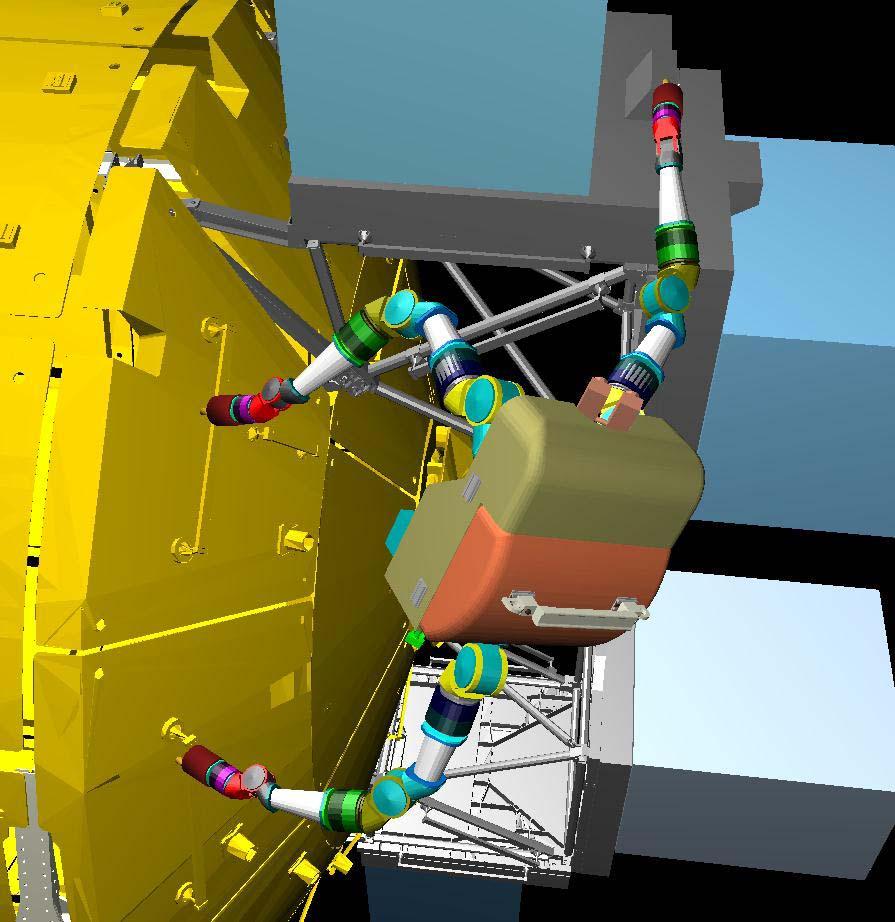
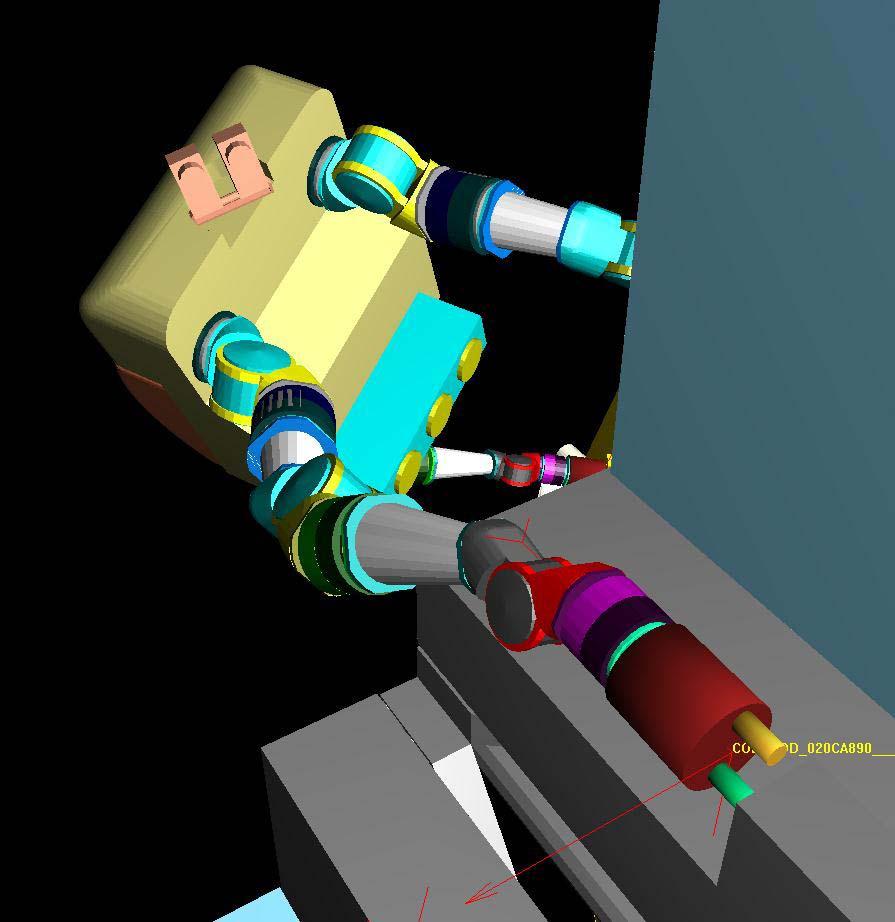
16 Configuration-5 at work on Columbus-EPF 16 16


17 Stepping over Columbus-Node




18 Tools Panoply Hand-Rail End-Effector Robotic I/F End-Effector General Gripper End-Effector Multi-Tool End-Effector Specific Operation End-Effector 18 18
 36")
19 ORU Panoply in Brief Example: US segment alone has large quantity of EVR ORUs (~300 already)
 ORUs 20")
20 ORU Panoply: from Small (~1 kg) to Large (max 362 kg) ORUs 20 20


21 I/F Panoply H-Fixture Micro Square Micro Conical US-Segment Dog Bone RS Square 21 21

22 Home Base Concept ExPA positions on ISS truss UCP position on US airlock EUROBOT platform position on US trunnion 22 ExPA Adapter on Columbus EPF EUROBOT platform position on Columbus trunnion 22

 Eurobot homebase mounted to")
23 Home Base Concept Placement of the home base on ISS Deploy Dedicated Eurobot homebase platform mounted to a Columbus trunnion (TBC) Eurobot homebase mounted to EPF (TBC) 23 23
24 Life After ISS Humans will move beyond Earth orbit back to the Moon & on to Mars Mobile manipulator technologies developed for EUROBOT project may be applied & developed further for Exploration programme Technologies used both in early robotic missions & later human missions Human missions may benefit from dedicated Mobile Manipulator System (MMS) in the role of EVA crew assistant 24 24
25 Manipulators in Space Exploration Phase Robotic Exploration Human Arrival Imminent Human Arrival Long-Term Presence Space Environment Earth orbit Interplanetary Space Moon/Mars orbit Test robotic/mms technology & operations in LEO or on ISS On MSR mission, use for sample handover from ascent vehicle to Earth-return vehicle Test robotic/mms technology & operations in LEO or on ISS Maintenance of human mission modules sent in advance of human arrival Use during potential on-orbit assembly of human mission modules Transfer vehicle maintenance; crew assistant Orbit vehicle maintenance; crew assistant Use during potential on-orbit assembly of human mission modules Transfer vehicle maintenance; crew assistant Orbit vehicle maintenance; crew assistant 25 25
26 Manipulators on Moon/Mars Surface Planetary Science Surface characterisation experiments Sample handling* Imaging Astrobiology experiments (search for life) Telescope/observatory operation Characterise surfaceatmosphere interactions Determine process of regolith formation & subsequent weathering Determine processes controlling distributions of dust, water, CO2 by determining long & short term events Site Scouting & Characterisation Imaging/mapping Travel to/through hostile terrain Mobile "weather" station Search for micro-climates, eg thru changes in volatiles Determine present state, 3D distribution and cycling of water Sample handling Surface characterisation experiments (Electromechanical/engineering properties) Ionising radiation surface & shielding properties of the soil (& Martian atmosphere) Determine chemical & toxilogical properties of surface materials Measure atmospheric parameters & variations that effect surface systems (eg boundary layer) Determine electrical effects of atmosphere (Mars) Site Preparation & Infrastructure Deployment Clearing landing site? Deployment of solar arrays Deployment & check-out of nuclear power systems Deployment & check-out of ISRU units Help make Lunar/Martian concrete/cement Infrastructure Operation & Maintenance Operation & inspection of ISRU systems Inspection & monitoring of propellant & consumables storage tanks Inspection of nuclear facility Inspection of site damage after storm NDI (Non-destructive Inspection) type testing of structures Maintenance of solar arrays (eg wrt dust etc) Required Capabilities: Instrument deployment & positioning Soil manipulation Science sample handling (acquiring, transferring, delivering & analysing) Object & parts handling Mechanism actuation Tools handling and manipulation Imaging Interface with surface systems, payloads & crew 26 EVA Support Carry tools and hand them to astronauts "Eyes" for IVA astronaut Emergency / back-up comms station Additional / mobile comms relay station Sample handling* Robotic cameraman / journalist Mobile computer / reference manual "Record" EVA sessions ("diary-keeper") Deployable navigation aid / emergency beacon Additional/emergency lighting "Fetch & carry" Emergency re-charge station for PLSS? IVA Support Routine greenhouse operations Process plants into ingredients Telemedicine? 26
27 KO : April 04 Eurobot Study KO Phase A Full Eurobot Branch Feasibility Developme nt Plan Identification Of Demonstrator Feasibility Demonstrator Branch PRR/dPRR: Mid Nov 04 PRR Phase B1 Preliminary Definition Preliminary Definition SRR: Feb 2005 SRR PDR: Jun 2005 PR: Jun 2005 input for C/Min Phase B2 Detailed Definition PDR 27 Programmatic Review 27
28 Conclusion Eurobot presents a robotic solution to problems of EVA crew availability and hostile environments ESA robotics studies harmonised to focus in same direction (arm/leg, hand, teleops, MMI) Study aimed at getting a flight demonstrator on ISS before end of this decade 28 28
An Overview of CSA s s Space Robotics Activities
 An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science
 Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
From MARS To MOON. V. Giorgio Director of Italian Programs. Sorrento, October, All rights reserved, 2007, Thales Alenia Space
 From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
Lunar Architecture and LRO
 Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
The European Lunar Lander Mission
 The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
Next Steps in Human Exploration: Cislunar Systems and Architectures
 Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
European Lunar Lander: System Engineering Approach
 human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
RIMRES: A project summary
 RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
Adrestia. A mission for humanity, designed in Delft. Challenge the future
 Adrestia A mission for humanity, designed in Delft 1 Adrestia Vision Statement: To inspire humanity by taking the next step towards setting a footprint on Mars Mission Statement Our goal is to design an
Adrestia A mission for humanity, designed in Delft 1 Adrestia Vision Statement: To inspire humanity by taking the next step towards setting a footprint on Mars Mission Statement Our goal is to design an
GROUND TESTS FOR ON-ORBIT SERVICING OF A GEO SATELLITE FLEET
 GROUND TESTS FOR ON-ORBIT SERVICING OF A GEO SATELLITE FLEET C. Heemskerk(1), C. Cougnet (2), K. Kapellos (3), H Bruyninckx (4), R. Smits (4) G. Visentin (5) INTRODUCTION (1) Dutch Space, Mendelweg 30,
GROUND TESTS FOR ON-ORBIT SERVICING OF A GEO SATELLITE FLEET C. Heemskerk(1), C. Cougnet (2), K. Kapellos (3), H Bruyninckx (4), R. Smits (4) G. Visentin (5) INTRODUCTION (1) Dutch Space, Mendelweg 30,
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity
 The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
NEXT Exploration Science and Technology Mission. Relevance for Lunar Exploration
 NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region
 MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region David Willson (david.willson@au.tenovagroup.com) and Jonathan D. A. Clarke (jon.clarke@bigpond.com), Mars Society Australia The centrepiece
MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region David Willson (david.willson@au.tenovagroup.com) and Jonathan D. A. Clarke (jon.clarke@bigpond.com), Mars Society Australia The centrepiece
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
Human Exploration of the Lunar Surface
 International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration
 National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing
 Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing Therese Griebel NASA Glenn Research Center 1 Overview Current developments in technology that could meet NASA, DOD and commercial
Solar Electric Propulsion Benefits for NASA and On-Orbit Satellite Servicing Therese Griebel NASA Glenn Research Center 1 Overview Current developments in technology that could meet NASA, DOD and commercial
Lunar Robotics. Dr. Rob Ambrose, NASA JSC December Dr. Robert O. Ambrose
 Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
Results of the Airbus DS led e.deorbit Phase B1 ESA study. Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, October 2017
 Results of the Airbus DS led e.deorbit Phase B1 ESA study Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, 24-26 October 2017 2 e.deorbit Mission Final rendezvous and capture phase Phase B1 Team
Results of the Airbus DS led e.deorbit Phase B1 ESA study Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, 24-26 October 2017 2 e.deorbit Mission Final rendezvous and capture phase Phase B1 Team
Lunar Surface Access from Earth-Moon L1/L2 A novel lander design and study of alternative solutions
 Lunar Surface Access from Earth-Moon L1/L2 A novel lander design and study of alternative solutions 28 November 2012 Washington, DC Revision B Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
Lunar Surface Access from Earth-Moon L1/L2 A novel lander design and study of alternative solutions 28 November 2012 Washington, DC Revision B Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return
 Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, GMT
 Friday, October 30, GMT") Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Suitability of reusability for a Lunar re-supply system
 www.dlr.de Chart 1 Suitability of reusability for a Lunar re-supply system Etienne Dumont Space Launcher Systems Analysis (SART) Institut of Space Systems, Bremen, Germany Etienne.dumont@dlr.de IAC 2016
www.dlr.de Chart 1 Suitability of reusability for a Lunar re-supply system Etienne Dumont Space Launcher Systems Analysis (SART) Institut of Space Systems, Bremen, Germany Etienne.dumont@dlr.de IAC 2016
WhirliGig Transfer Vehicle for motor-driven, restartable A.G. Tom Sullivan June, 2002
 WhirliGig Transfer Vehicle for motor-driven, restartable A.G. Tom Sullivan June, 2002 Thrusters (notional) Prop tanks, Ar Rankine Engines (3) Rxtr Radiator, both sides ~25 m Side view 4-5 m Flow of potassium
WhirliGig Transfer Vehicle for motor-driven, restartable A.G. Tom Sullivan June, 2002 Thrusters (notional) Prop tanks, Ar Rankine Engines (3) Rxtr Radiator, both sides ~25 m Side view 4-5 m Flow of potassium
Exploration Architecture Update
 Exploration Architecture Update Doug Cooke Deputy Associate Administrator Exploration Systems Mission Directorate John Connolly Vehicle Engineering and Integration Lunar Lander Project Office March 14,
Exploration Architecture Update Doug Cooke Deputy Associate Administrator Exploration Systems Mission Directorate John Connolly Vehicle Engineering and Integration Lunar Lander Project Office March 14,
Mars Surface Mobility Proposal
 Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow
 lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow John Connolly Lunar Lander Project Office 1 Components of Program Constellation Earth Departure Stage Ares V - Heavy
lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow John Connolly Lunar Lander Project Office 1 Components of Program Constellation Earth Departure Stage Ares V - Heavy
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012
 Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Cygnus Payload Accommodations: Supporting ISS Utilization
 The Space Congress Proceedings 2018 (45th) The Next Great Steps Feb 27th, 1:30 PM Cygnus Payload Accommodations: Supporting ISS Utilization Frank DeMauro Vice President and General Manager, Advanced Programs
The Space Congress Proceedings 2018 (45th) The Next Great Steps Feb 27th, 1:30 PM Cygnus Payload Accommodations: Supporting ISS Utilization Frank DeMauro Vice President and General Manager, Advanced Programs
Planetary Surface Transportation and Site Development
 Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
 Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
Martin J. L. Turner. Expedition Mars. Published in association with. Chichester, UK
 Martin J. L. Turner Expedition Mars Springer Published in association with Praxis Publishing Chichester, UK Contents Preface Acknowledgements List of illustrations, colour plates and tables xi xv xvii
Martin J. L. Turner Expedition Mars Springer Published in association with Praxis Publishing Chichester, UK Contents Preface Acknowledgements List of illustrations, colour plates and tables xi xv xvii
Robots to Support a Human Mars Mission
 Robots to Support a Human Mars Mission 1 W. Naumann, P. Hofmann, A. v. Richter Kayser-Threde GmbH Wolfratshauser Str. 48, D-81379 München email: andreas.von.richter@kayser-threde.com 7th Workshop ASTRA
Robots to Support a Human Mars Mission 1 W. Naumann, P. Hofmann, A. v. Richter Kayser-Threde GmbH Wolfratshauser Str. 48, D-81379 München email: andreas.von.richter@kayser-threde.com 7th Workshop ASTRA
Light-Lift Rocket II
 Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Space Robotics Planetary Exploration - a DLR Perspective
 Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Mars 2018 Mission Status and Sample Acquisition Issues
 Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce
 Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce Dr. Allison Zuniga, Mark Turner and Dr. Dan Rasky NASA Ames Research Center Space Portal Office Mike
Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce Dr. Allison Zuniga, Mark Turner and Dr. Dan Rasky NASA Ames Research Center Space Portal Office Mike
Chassis Concepts for the ExoMars Rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
International Space Station External Payload Accommodations November, 2012
 International Space Station External Payload Accommodations November, 2012 ISS Technology Demonstration Office Research Integration Office 0 International Space Station Facts 1 Keel Side ELC2 International
International Space Station External Payload Accommodations November, 2012 ISS Technology Demonstration Office Research Integration Office 0 International Space Station Facts 1 Keel Side ELC2 International
The Intermediate Outpost - An Alternate Concept for Human Lunar Exploration
 AIAA SPACE 2007 Conference & Exposition 18-20 September 2007, Long Beach, California AIAA 2007-6274 The Intermediate Outpost - An Alternate Concept for Human Lunar Exploration Wilfried K. Hofstetter *,
AIAA SPACE 2007 Conference & Exposition 18-20 September 2007, Long Beach, California AIAA 2007-6274 The Intermediate Outpost - An Alternate Concept for Human Lunar Exploration Wilfried K. Hofstetter *,
Lunette: A Global Network of Small Lunar Landers
 Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics: Results and Roadmaps
 National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
Space Architecture. Master s Thesis Project Jain, Abhishek Dec. 2 nd, 2013
 Space Architecture Master s Thesis Project Jain, Abhishek Dec. 2 nd, 2013 Contents Catalog design for medium lift launch vehicles Catalog application Mission architecture - Lagrange point L2 mission L2
Space Architecture Master s Thesis Project Jain, Abhishek Dec. 2 nd, 2013 Contents Catalog design for medium lift launch vehicles Catalog application Mission architecture - Lagrange point L2 mission L2
Case Study: ParaShield
 Case Study: ParaShield Origin of ParaShield Concept ParaShield Flight Test Wind Tunnel Testing Future Applications U N I V E R S I T Y O F MARYLAND 2012 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu
Case Study: ParaShield Origin of ParaShield Concept ParaShield Flight Test Wind Tunnel Testing Future Applications U N I V E R S I T Y O F MARYLAND 2012 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu
CHANGING ENTRY, DESCENT, AND LANDING PARADIGMS FOR HUMAN MARS LANDER
 National Aeronautics and Space Administration CHANGING ENTRY, DESCENT, AND LANDING PARADIGMS FOR HUMAN MARS LANDER Alicia Dwyer Cianciolo NASA Langley Research Center 2018 International Planetary Probe
National Aeronautics and Space Administration CHANGING ENTRY, DESCENT, AND LANDING PARADIGMS FOR HUMAN MARS LANDER Alicia Dwyer Cianciolo NASA Langley Research Center 2018 International Planetary Probe
SPACE STATIONS USING THE SKYLON LAUNCH SYSTEM
 IAC-10.B3.7.3 SPACE STATIONS USING THE SKYLON LAUNCH SYSTEM Mark Hempsell Reaction Engines Ltd Building D5,Culham Science Centre, Abingdon, Oxon, OX14 3DB United Kingdom mark.hempsell@reactionengines.co.uk
IAC-10.B3.7.3 SPACE STATIONS USING THE SKYLON LAUNCH SYSTEM Mark Hempsell Reaction Engines Ltd Building D5,Culham Science Centre, Abingdon, Oxon, OX14 3DB United Kingdom mark.hempsell@reactionengines.co.uk
Innovative Mars exploration rover using inflatable or unfolding wheels
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
MARTIAN HABITAT DESIGN
 MARTIAN HABITAT DESIGN MARS OR BUST, INC. UNIVERSITY OF COLORADO, BOULDER AEROSPACE ENGINEERING SCIENCES ASEN 4158/5158 MOB DECEMBER 17, 2003 TABLE OF CONTENTS 1 MISSION SUMMARY... 8 1.1 CONTEXT OF THIS
MARTIAN HABITAT DESIGN MARS OR BUST, INC. UNIVERSITY OF COLORADO, BOULDER AEROSPACE ENGINEERING SCIENCES ASEN 4158/5158 MOB DECEMBER 17, 2003 TABLE OF CONTENTS 1 MISSION SUMMARY... 8 1.1 CONTEXT OF THIS
OLEV AN ON-ORBIT SERVICING PROGRAM FOR COMMERCIAL SPACECRAFTS IN GEO
 Von der Erde ins All. Und zurück. Intelligente Lösungen für Industrie und Wissenschaft. From Earth to Space. And back. Intelligent solutions for industry and science. E a r t h S p a c e & F u t u r e
Von der Erde ins All. Und zurück. Intelligente Lösungen für Industrie und Wissenschaft. From Earth to Space. And back. Intelligent solutions for industry and science. E a r t h S p a c e & F u t u r e
Ares V: Supporting Space Exploration from LEO to Beyond
 Ares V: Supporting Space Exploration from LEO to Beyond American Astronautical Society Wernher von Braun Memorial Symposium October 21, 2008 Phil Sumrall Advanced Planning Manager Ares Projects Office
Ares V: Supporting Space Exploration from LEO to Beyond American Astronautical Society Wernher von Braun Memorial Symposium October 21, 2008 Phil Sumrall Advanced Planning Manager Ares Projects Office
ORBITAL EXPRESS Space Operations Architecture Program 17 th Annual AIAA/USU Conference on Small Satellites August 12, 2003
 ORBITAL EXPRESS Space Operations Architecture Program 17 th Annual AIAA/USU Conference on Small Satellites August 12, 2003 Major James Shoemaker, USAF, Ph.D. DARPA Orbital Express Space Operations Program
ORBITAL EXPRESS Space Operations Architecture Program 17 th Annual AIAA/USU Conference on Small Satellites August 12, 2003 Major James Shoemaker, USAF, Ph.D. DARPA Orbital Express Space Operations Program
Extending NASA s Exploration Systems Architecture towards Longterm Crewed Moon and Mars Operations
 SpaceOps 2006 Conference AIAA 2006-5746 Extending NASA s Exploration Systems Architecture towards Longterm Crewed Moon and Mars Operations Wilfried K. Hofstetter *, Paul D. Wooster, Edward F. Crawley Massachusetts
SpaceOps 2006 Conference AIAA 2006-5746 Extending NASA s Exploration Systems Architecture towards Longterm Crewed Moon and Mars Operations Wilfried K. Hofstetter *, Paul D. Wooster, Edward F. Crawley Massachusetts
SPARTAN. Date: All rights reserved 2011, Thales Alenia Space. Business Unit Space Infrastructures & Transportation
 SPARTAN Date: Business Unit Space Infrastructures & Transportation February the 17 2011 All rights reserved 2011, Thales Alenia Space Project Overview 2 From 3 rd Fp7 Space Call Grant Agreement n. 262837
SPARTAN Date: Business Unit Space Infrastructures & Transportation February the 17 2011 All rights reserved 2011, Thales Alenia Space Project Overview 2 From 3 rd Fp7 Space Call Grant Agreement n. 262837
Challenges of Designing the MarsNEXT Network
 Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
On Orbit Refueling: Supporting a Robust Cislunar Space Economy
 On Orbit Refueling: Supporting a Robust Cislunar Space Economy Courtesy of NASA 3 April 2017 Copyright 2014 United Launch Alliance, LLC. All Rights Reserved. Atlas V Launch History ULA s Vision: Unleashing
On Orbit Refueling: Supporting a Robust Cislunar Space Economy Courtesy of NASA 3 April 2017 Copyright 2014 United Launch Alliance, LLC. All Rights Reserved. Atlas V Launch History ULA s Vision: Unleashing
Lunar Science and Infrastructure with the Future Lunar Lander
 ICEUM9 Sorrento Lunar Science and Infrastructure with the Future Lunar Lander Session 9: Next steps for Robotic Landers, Rovers and Outposts ICEUM9 Sorrento, Oct. 26, 2007 Hansjürgen Günther 26/10/2007
ICEUM9 Sorrento Lunar Science and Infrastructure with the Future Lunar Lander Session 9: Next steps for Robotic Landers, Rovers and Outposts ICEUM9 Sorrento, Oct. 26, 2007 Hansjürgen Günther 26/10/2007
Industrial-and-Research Lunar Base
 Industrial-and-Research Lunar Base STRATEGY OF LUNAR BASE CREATION Phase 1 Preparatory: creation of international cooperation, investigation of the Moon by unmanned spacecraft, creation of space transport
Industrial-and-Research Lunar Base STRATEGY OF LUNAR BASE CREATION Phase 1 Preparatory: creation of international cooperation, investigation of the Moon by unmanned spacecraft, creation of space transport
Baseline Concepts of the Kayser-Threde Team
 Kayser-Threde GmbH Space Industrial Applications e.deorbit Mission Phase A Baseline Concepts of the Kayser-Threde Team 6 May 2014, Conference Centre Leeuwenhorst, The Netherlands Agenda Introduction Target
Kayser-Threde GmbH Space Industrial Applications e.deorbit Mission Phase A Baseline Concepts of the Kayser-Threde Team 6 May 2014, Conference Centre Leeuwenhorst, The Netherlands Agenda Introduction Target
Long-Range Rovers for Mars Exploration and Sample Return
 2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
Lunar and Mars Mission Analysis and Design Using Commercial Launch Systems and the International Space Station
 1 Lunar and Mars Mission Analysis and Design Using Commercial Launch Systems and the International Space Station ARCH 7610: Master s Project Space Architecture ARCH 6398: Special Projects David Smitherman
1 Lunar and Mars Mission Analysis and Design Using Commercial Launch Systems and the International Space Station ARCH 7610: Master s Project Space Architecture ARCH 6398: Special Projects David Smitherman
Using Microtechnologies to Build Micro-Robot Systems
 Using Microtechnologies to Build Micro-Robot Systems W.Hill*, P.-A. Mäusli**, T. Estier***, R. Huber****, M.van Winnendael***** *) Astrium, **) Mecanex, ***) Ecole Polytechnique Fédérale de Lausanne (EPFL),
Using Microtechnologies to Build Micro-Robot Systems W.Hill*, P.-A. Mäusli**, T. Estier***, R. Huber****, M.van Winnendael***** *) Astrium, **) Mecanex, ***) Ecole Polytechnique Fédérale de Lausanne (EPFL),
Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems
 www.dlr.de\rm Chart 1 > ASTRA 2013 - Pan/Tilt-Unit as a Perception Module 16.05.2013 Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems DLR-RMC Robotic and Mechatronic
www.dlr.de\rm Chart 1 > ASTRA 2013 - Pan/Tilt-Unit as a Perception Module 16.05.2013 Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems DLR-RMC Robotic and Mechatronic
Mobile Payload Element (MPE)
") Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
Development of a Low Cost Suborbital Rocket for Small Satellite Testing and In-Space Experiments
 Development of a Low Cost Suborbital Rocket for Small Satellite Testing and In-Space Experiments Würzburg, 2015-09-15 (extended presentation) Dr.-Ing. Peter H. Weuta Dipl.-Ing. Neil Jaschinski WEPA-Technologies
Development of a Low Cost Suborbital Rocket for Small Satellite Testing and In-Space Experiments Würzburg, 2015-09-15 (extended presentation) Dr.-Ing. Peter H. Weuta Dipl.-Ing. Neil Jaschinski WEPA-Technologies
LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE
 LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE ABSTRACT With 1 rover, 2 astronauts and 3 days, the Apollo 17 Mission covered over 30 km, setup
LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE ABSTRACT With 1 rover, 2 astronauts and 3 days, the Apollo 17 Mission covered over 30 km, setup
Heat Shield Design Project
 Name Class Period Heat Shield Design Project The heat shield is such a critical piece, not just for the Orion mission, but for our plans to send humans into deep space. Final Points Earned Class Participation/Effort
Name Class Period Heat Shield Design Project The heat shield is such a critical piece, not just for the Orion mission, but for our plans to send humans into deep space. Final Points Earned Class Participation/Effort
Massachusetts Space Grant Consortium
 Massachusetts Space Grant Consortium Distinguished Lecturer Series NASA Administrator Dr. Michael Griffin NASA s Exploration Architecture March 8, 2006 Why We Explore Human curiosity Stimulates our imagination
Massachusetts Space Grant Consortium Distinguished Lecturer Series NASA Administrator Dr. Michael Griffin NASA s Exploration Architecture March 8, 2006 Why We Explore Human curiosity Stimulates our imagination
Plug-in Hardware Concepts for Mobile Modular Surface Habitats
 Howe, A.S. & Howe, J.W. (2005). Plug-in Hardware Concepts for Mobile Modular Surface Habitats AIAA- 2005-2673. The 1st Exploration Conference: Continuing the Voyage of Discovery, Orlando, Florida, 30 Jan
Howe, A.S. & Howe, J.W. (2005). Plug-in Hardware Concepts for Mobile Modular Surface Habitats AIAA- 2005-2673. The 1st Exploration Conference: Continuing the Voyage of Discovery, Orlando, Florida, 30 Jan
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES
 FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
The Mars Express Mission A Continuing Challenge. Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner
 The Mars Express Mission A Continuing Challenge Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner Mars Society, Munich, 13 October, 2012 The Mars Express Mission - a First in
The Mars Express Mission A Continuing Challenge Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner Mars Society, Munich, 13 October, 2012 The Mars Express Mission - a First in
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE
 INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
LUNAR INDUSTRIAL RESEARCH BASE. Yuzhnoye SDO proprietary
 LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
On the feasibility of a fast track return to Mars
 On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
A LEO Propellant Depot System Concept for Outgoing Exploration
 A LEO Propellant Depot System Concept for Outgoing Exploration Dallas Bienhoff The Boeing Company 703-414-6139 NSS ISDC Dallas, Texas May 25-28, 2007 First, There was the Vision... Page 1 Then, the ESAS
A LEO Propellant Depot System Concept for Outgoing Exploration Dallas Bienhoff The Boeing Company 703-414-6139 NSS ISDC Dallas, Texas May 25-28, 2007 First, There was the Vision... Page 1 Then, the ESAS
Space Exploration Via Technology Demonstration and Small Satellite Missions Flown on Reusable Launch Vehicles SSC04-X-8.
 Space Exploration Via Technology Demonstration and Small Satellite Missions Flown on Reusable Launch Vehicles SSC04-X-8 Presented to: Utah State Small Satellite Conference Logan, Utah August 12, 2004 Debra
Space Exploration Via Technology Demonstration and Small Satellite Missions Flown on Reusable Launch Vehicles SSC04-X-8 Presented to: Utah State Small Satellite Conference Logan, Utah August 12, 2004 Debra
Boeing CST-100. Commercial Crew Transportation System. Keith Reiley, The Boeing Company. February, 2011
 Boeing CST-100 Commercial Crew Transportation System Keith Reiley, The Boeing Company February, 2011 BOEING is a trademark of Boeing Management Company. Commercial Crew Transportation System (CCTS) Design
Boeing CST-100 Commercial Crew Transportation System Keith Reiley, The Boeing Company February, 2011 BOEING is a trademark of Boeing Management Company. Commercial Crew Transportation System (CCTS) Design
MASCOT Marco Polo Surface Scout. Progress Report on Lander Package Study for Marco Polo
 MASCOT Marco Polo Surface Scout Progress Report on Lander Package Study for Marco Polo Lutz Richter 1, Lars Witte 1, Tra-Mi Ho 1, Stephan Ulamec 2, Jean-Pierre Bibring 3 1 DLR Bremen, 2 DLR Cologne, 3
MASCOT Marco Polo Surface Scout Progress Report on Lander Package Study for Marco Polo Lutz Richter 1, Lars Witte 1, Tra-Mi Ho 1, Stephan Ulamec 2, Jean-Pierre Bibring 3 1 DLR Bremen, 2 DLR Cologne, 3
Europa Lander. Mission Concept Update 3/29/2017
 Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
The Role of Electric Propulsion in a Flexible Architecture for Space Exploration
 The Role of Electric Propulsion in a Flexible Architecture for Space Exploration IEPC-2011-210 Presented at the 32nd International Electric Propulsion Conference, Wiesbaden Germany C. Casaregola 1, D.
The Role of Electric Propulsion in a Flexible Architecture for Space Exploration IEPC-2011-210 Presented at the 32nd International Electric Propulsion Conference, Wiesbaden Germany C. Casaregola 1, D.
Martian In Situ Investigations
 Mars MetNet Mission and Payload Precursors Martian In Situ Investigations Saariselkä, 30.3.2017 EuroPlanet Workshop Dr. Ari-Matti Harri Finnish Meteorological Institute Finnish Meteorological Institute,
Mars MetNet Mission and Payload Precursors Martian In Situ Investigations Saariselkä, 30.3.2017 EuroPlanet Workshop Dr. Ari-Matti Harri Finnish Meteorological Institute Finnish Meteorological Institute,
Table of Contents. Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.
 Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.") March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
GEO Dual Mode PPU & LEO HEMPT PPU
 GEO Dual Mode PPU & LEO HEMPT PPU EPIC Workshop 2018 London 15-17 Oct 1 Presentation Plan Thales Alenia Space in Belgium, previously named ETCA was created in 1963, 54 years' experience in power supplies
GEO Dual Mode PPU & LEO HEMPT PPU EPIC Workshop 2018 London 15-17 Oct 1 Presentation Plan Thales Alenia Space in Belgium, previously named ETCA was created in 1963, 54 years' experience in power supplies
IMAGING LIDAR TECHNOLOGY Development of a 3D-LIDAR Elegant Breadboard for Rendezvous & Docking, Test Results, Prospect to Future Sensor Application
 B. Moebius Jena-Optronik/ Germany, M. Pfennigbauer Riegl Measurement Systems/ Austria, J. Pereira do Carmo ESTEC/ The Netherlands IMAGING LIDAR TECHNOLOGY Development of a 3D-LIDAR Elegant Breadboard for
B. Moebius Jena-Optronik/ Germany, M. Pfennigbauer Riegl Measurement Systems/ Austria, J. Pereira do Carmo ESTEC/ The Netherlands IMAGING LIDAR TECHNOLOGY Development of a 3D-LIDAR Elegant Breadboard for
OMOTENASHI. (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor)
") SLS EM-1 secondary payload OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) The smallest moon lander launched by the most powerful rocket in the world * Omotenashi
SLS EM-1 secondary payload OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) The smallest moon lander launched by the most powerful rocket in the world * Omotenashi
Two Related Primary Challenges for Successful Renewed Lunar Exploration
 Two Related Primary Challenges for Successful Renewed Lunar Exploration October 10, 2017 Presented By Ron Creel Retired Apollo Lunar Roving Vehicle Team Member OUTLINE Challenge 1 Coping with Exposure
Two Related Primary Challenges for Successful Renewed Lunar Exploration October 10, 2017 Presented By Ron Creel Retired Apollo Lunar Roving Vehicle Team Member OUTLINE Challenge 1 Coping with Exposure
NanoRacks External Payload Platform
 NanoRacks External Payload Platform Introduction NanoRacks has developed a hosted payload service, NanoRacks External Payload Platform (NREP) NREP will be installed on the JEM EF Hosted payloads will utilize
NanoRacks External Payload Platform Introduction NanoRacks has developed a hosted payload service, NanoRacks External Payload Platform (NREP) NREP will be installed on the JEM EF Hosted payloads will utilize
1 Department of Physics, University of Rome Tor Vergata, Rome, Italy 2 INFN Roma II, Rome, Italy
 21st WRMISS 2016 6 8 September 2016 ESA- ESTEC Noordwijk, The Netherlands ALTEA Measurements on radiation shielding efficacy of Kevlar, compared to Polyethylene performances, in the International Space
21st WRMISS 2016 6 8 September 2016 ESA- ESTEC Noordwijk, The Netherlands ALTEA Measurements on radiation shielding efficacy of Kevlar, compared to Polyethylene performances, in the International Space
Good afternoon. We're going to be talking today about frontiers of imagination in space exploration
 Good afternoon. We're going to be talking today about frontiers of imagination in space exploration First, though, I want to introduce myself. My name is Loretta Hall, and I'm a space buff. I've been a
Good afternoon. We're going to be talking today about frontiers of imagination in space exploration First, though, I want to introduce myself. My name is Loretta Hall, and I'm a space buff. I've been a
r bulletin 96 november 1998 Figure 1. Overall ATV configuration (ESA/D. Ducros)
") r bulletin 96 november 1998 Figure 1. Overall ATV configuration (ESA/D. Ducros) atv The Automated Transfer Vehicle P. Amadieu Head of ATV/CTV Projects Division, ESA Directorate of Manned Spaceflight and
r bulletin 96 november 1998 Figure 1. Overall ATV configuration (ESA/D. Ducros) atv The Automated Transfer Vehicle P. Amadieu Head of ATV/CTV Projects Division, ESA Directorate of Manned Spaceflight and
Pathfinder Technology Demonstrator
 Demonstrating Advanced Technologies for Advanced Missions CubeSat Developer s Workshop April 26 th, 2017 NASA Space Technology Mission Directorate NASA Small Spacecraft Technology Program NASA Ames Research
Demonstrating Advanced Technologies for Advanced Missions CubeSat Developer s Workshop April 26 th, 2017 NASA Space Technology Mission Directorate NASA Small Spacecraft Technology Program NASA Ames Research
BIMODAL NUCLEAR THERMAL ROCKET (BNTR) PROPULSION FOR FUTURE HUMAN MARS EXPLORATION MISSIONS
 PROPULSION FOR FUTURE HUMAN MARS EXPLORATION MISSIONS") BIMODAL NUCLEAR THERMAL ROCKET (BNTR) PROPULSION FOR FUTURE HUMAN MARS EXPLORATION MISSIONS Stan Borowski National Aeronautics and Space Administration Glenn Research Center Cleveland, Ohio Bimodal Nuclear
BIMODAL NUCLEAR THERMAL ROCKET (BNTR) PROPULSION FOR FUTURE HUMAN MARS EXPLORATION MISSIONS Stan Borowski National Aeronautics and Space Administration Glenn Research Center Cleveland, Ohio Bimodal Nuclear
BIMODAL NUCLEAR THERMAL ROCKET (BNTR) PROPULSION FOR FUTURE HUMAN MARS EXPLORATION MISSIONS
 PROPULSION FOR FUTURE HUMAN MARS EXPLORATION MISSIONS") BIMODAL NUCLEAR THERMAL ROCKET (BNTR) PROPULSION FOR FUTURE HUMAN MARS EXPLORATION MISSIONS Stan Borowski National Aeronautics and Space Administration Glenn Research Center Cleveland, Ohio Bimodal Nuclear
BIMODAL NUCLEAR THERMAL ROCKET (BNTR) PROPULSION FOR FUTURE HUMAN MARS EXPLORATION MISSIONS Stan Borowski National Aeronautics and Space Administration Glenn Research Center Cleveland, Ohio Bimodal Nuclear
Palamede, more than a microsatellite. Workshop on University Micro Satellites in Italy Rome, July 27, 2005
 Palamede, more than a microsatellite The Palamede Team (represented by Franco Bernelli and Roberto Armellin) Workshop on University Micro Satellites in Italy Rome, July 27, 2005 Outline Mission and educational
Palamede, more than a microsatellite The Palamede Team (represented by Franco Bernelli and Roberto Armellin) Workshop on University Micro Satellites in Italy Rome, July 27, 2005 Outline Mission and educational
Pre-Launch Procedures
 Pre-Launch Procedures Integration and test phase This phase of operations takes place about 3 months before launch, at the TsSKB-Progress factory in Samara, where Foton and its launch vehicle are built.
Pre-Launch Procedures Integration and test phase This phase of operations takes place about 3 months before launch, at the TsSKB-Progress factory in Samara, where Foton and its launch vehicle are built.
THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS. Nagin Cox
 THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS Nagin Cox Jet Propulsion Laboratory National Air & Space Administration/California Institute of Technology Email: nagin@jpl.nasa.gov Abstract: Since
THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS Nagin Cox Jet Propulsion Laboratory National Air & Space Administration/California Institute of Technology Email: nagin@jpl.nasa.gov Abstract: Since
NASA Perspectives on the Importance of Reform in Electric Energy Systems Education
 NASA Perspectives on the Importance of Reform in Electric Energy Systems Education Reforming Electric Energy Systems Curriculum With Emphasis on Renewable/Storage, Smart Delivery, and Efficient End-Use
NASA Perspectives on the Importance of Reform in Electric Energy Systems Education Reforming Electric Energy Systems Curriculum With Emphasis on Renewable/Storage, Smart Delivery, and Efficient End-Use
ReachMars 2024 A Candidate Large-Scale Technology Demonstration Mission as a Precursor to Human Mars Exploration
 ReachMars 2024 A Candidate Large-Scale Technology Demonstration Mission as a Precursor to Human Mars Exploration 1 October 2014 Toronto, Canada Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
ReachMars 2024 A Candidate Large-Scale Technology Demonstration Mission as a Precursor to Human Mars Exploration 1 October 2014 Toronto, Canada Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
Jay Gundlach AIAA EDUCATION SERIES. Manassas, Virginia. Joseph A. Schetz, Editor-in-Chief. Blacksburg, Virginia. Aurora Flight Sciences
 Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Routine Scheduled Space Access For Secondary Payloads
 SSC10-IX-8 Routine Scheduled Space Access For Secondary Jason Andrews, President and CEO, and Jeff Cannon, Senior Systems Engineer, Spaceflight Services, Inc. Tukwila, WA 98168 Telephone: 206.342.9934
SSC10-IX-8 Routine Scheduled Space Access For Secondary Jason Andrews, President and CEO, and Jeff Cannon, Senior Systems Engineer, Spaceflight Services, Inc. Tukwila, WA 98168 Telephone: 206.342.9934
MORPHbots: Lightweight Modular Self-Reconfigurable Robotics for Space Assembly, Inspection, and Servicing
 Space 2006 19-21 September 2006, San Jose, California AIAA 2006-7408 MORPHbots: Lightweight Modular Self-Reconfigurable Robotics for Space Assembly, Inspection, and Servicing David L. Akin *, Brian Roberts,
Space 2006 19-21 September 2006, San Jose, California AIAA 2006-7408 MORPHbots: Lightweight Modular Self-Reconfigurable Robotics for Space Assembly, Inspection, and Servicing David L. Akin *, Brian Roberts,