HUNGARY AS EUROPEAN HUB FOR AUTONOMOUS VEHICLE DESIGN
|
|
|
- Tobias O’Brien’
- 6 years ago
- Views:
Transcription



1 HUNGARY AS EUROPEAN HUB FOR AUTONOMOUS VEHICLE DESIGN Project presentation, December, 2017
2 Content What is the challenge? (Road) mobility as social need Opportunities and limitations of automatized vehicle driving Status of the Proving Ground project What steps led till today? Proving Ground Concept Project overview Why Hungary? The Hungarian automotive industry Previous activities in the field of electronic vehicle control Status of academic and industrial R&D Model of operation, services Business model principles Service portfolio Status of business development Principles of operation What can be tested? Functional overview Test track modules Services in detail. 2

3 What is the challenge?





4 Mobility as social challenge Inspirating factors for development 1 Zero Emission 2 Demographic pressure 3 Risk of accidents Fuel-consumption reduction Reducing emission Support of insecure leaders Increase the elderly mobility Avoidance of the accidents by reducing the effect of human mistakes 4 Increasing traffic density Management of transport process Comfortable, time-saving travel 5 Assistance systems Intelligent sensors for appropriate process Intelligent actuators (steering, brakes, etc.) Source: VDA What is the challenge? 4








5 Multi-level approach There is no one single good solution Optimization of the components and the whole conventional drive train system Introduction of new alternative fuels, drive systems, enhance energy recuperation Control of vehicle groups on different levels: traffic control, platoon control, fleet control What is the challenge? 5



6 Mobility as social challenge Technology is available Longitudinal control Transverse control Parking, maneuvering ACC traffic-jam assistant emergency braking assistant Lane-changing assistant, lanekeeping assitant Automated parking assistant Lighting Drive supervision Environmental supervision Adaptive long-distance lighting, adaptive cornering ligths Fatigue supervision Traffic sign detection Source: VDA What is the challenge? 6

7 Technical background Systems available nowadays Traffic-jam pilot Highway pilot Advanced Driving Assisatance Google car Pikes Peak Emergency Brake Assistance Source: VDA What is the challenge? 7

8 Technology is available since a long time Chaffeur II demonstrator in 1999 What is the challenge? 8




9 Increase level of automation and co-operative control Increase safety Reduce fatalities Increase efficiency Communication is introduced in vehicles Telematics Increase of level of assistance / automation Reduce emissions Support competiveness Governments are requested to provide a framework What is the challenge? 9

10 Vehicle - driver Change in driver s responsibility Levels of automatization The driver controls the vehicle, both longitudinally and transversely. No active intervening system. The role and responsibility of the driver just like today The driver controls the vehicle, either longitudinally or transversely. The intelligent systems intervene in the other direction. The driver constantly supervises the systems. The intelligent systems take the control in both longitudinal and transversal direction for a given time. The role and responsibility of the driver change, legal background The driver don t have to constantly supervise the system. The intelligent system fully takes control, intervenes, even in critical situations. The driver has enough time to take control. The vehicle is fully automated, the driver does not have to supervise the system. Only driver Driver support Partially automated Highly automated Fully automated Level Level of of automatization What is the challenge? 10

11 Mobility as social challenge Change in driver s responsibility TODAY 2017 TOMORROW < 2020 FUTURE > 2020 Lane departure warning Longitudinal control Emergency brake system Active steering Object detection in dead spot ACC + LKA Automated driving: The driver can do other activities Autonomous driving: Low following distance, lower fuel consumption DRIVER IS PART OF THE VEHICLE CONTROL FAIL SAFE SYSTEM DRIVER IS INACTIVE FAIL TOLERANT SYSTEM Source: Volvo, Knorr-Bremse What is the challenge? 11


")




12 Technical background Technology is ready - is it enough? Architecture Communication Rendundant central control unit Redundant communication in the car and with the outside (V2V, V2I) Power supply Redundant, galvanically separated energy storage and supervision system Sensors Redundant or error-tolerant sensors to supervise the condition of the vehicle Actuators What is the challenge? Redundant or error-tolerant intervention elements in the vehicle (steering wheel, brake, etc.) 12
13 Non-technical aspects Vienna treaty (1968) Basic requirements from 1968: All vehicles shall have a driver The driver shall control the vehicle all the constantly 23rd of March, 2016: A modification to the principles above, gives permission for automatization if the driver can overrule and turn it off What is the challenge? 13
 Utilizing the road infrastructure in a more efficient way Reducing the fuel consumption and")
14 How things will be combined? Platooning is a good example! Vehicles are travelling in a platoon are: Co-operatively controlled (communication among the members) Utilizing the road infrastructure in a more efficient way Reducing the fuel consumption and emission of the set of the vehicles Minimizing driver s fatigue and thus Probability of the accidents will be reduced What is the challenge? 14

15 In some sense: yes Optimal bio-intelligent system Transfered goods and navigation system Primary environment observer Redundant observer Transfer of the motion demand Motion coordination Biomechanical Motion realization What is the challenge? 15


16 Architecture in more technical way Corresponds to the bio-intelligent system Physical separation Functional separation CABIN Only Electrical Interface New operating philosophy: sidestick,... ACC, lane follower, autonomous driving Collision avoidance speed vector MMI (Man-Machine Interface) Automation of inputs Predictive input correction DRIVELINE What is the challenge? Translation to powertrain component inputs ESP, ESP with steering Powertrain co-ordination Reactive input correction Mechatronic subsystems: steering, engine, transmission... Execution 16
 we must be ready to manage the vehicles to handle the dangerous situations while having human")

17 Models of Mobility will Change Non-technical questions will also appear Source: Technologiereview, VDA Can we take away the enjoyment of driving from the driver? As different to the other co-operatively drivable vehicles (plane, boat, rail) we must be ready to manage the vehicles to handle the dangerous situations while having human participants with unperfect and very different abilities? What is the base of decision if we must choose from two bad options? Liability and legal concerns remain open for a while New business models/players will appear New concerns will rise: how can we guarantee, that autonomous vehicles will not be put in non-proper use, etc. Number of test/use cases can exponentially increase Model of operation 17

18 Why Hungary?


19 Characteristics of the Hungarian Automotive Industry Most deterministic industry in the country The Hungarian automotive industry has Source: Hungarian Statistical Office, 2016 Why Hungary? 19

20 Key players in Automotive Industry 700 automotive companies operate in Hungary out of the world TOP 20 TIER1 suppliers 15 have locations here Why Hungary? 20
 initiated by the Hungarian government 1987 1995 2001 2004 2006 Why")
21 Long term competency in electronic vehicle control High-level research already in the 80 s ESP with brake and steering intervention Intelligent 4WS ESP for trucks International regulation for ESP (WP29/GRRF) initiated by the Hungarian government Why Hungary? 21

22 Research Projects in HUNGARY ADAS Systems Adaptive speed control Visual-based control ACC with extended functionality Why Hungary? 22

23 Research Projects in HUNGARY Driverless Transportation On-site driverless maneuvering Platooning in 1999 and in Why Hungary? 23

24 Long term competency in electronic vehicle control Participation in all relevant large scale EU FP projects Budapest University of Technology and Economics Hungarian Academy of Sciences University of Szeged Széchenyi István University University of Pannonia Óbuda University Why Hungary? 24




25 Status of the project What does Zalaegerszeg Proving Ground offer?


 Detailed specification of the autonomous vehicle environment and related communication infrastructure Status of the project")
26 Co-operating industrial partners in requirement definition Industry demand is fulfilled Automotive Working Group, 2015: AImotive, AVL, BME GJT, BOSCH, Commsignia, Knorr-Bremse, Continental, EVOPRO, NKH, NI, SZTAKI, ThyssenKrupp Presta, TÜV Rheinland, ZF Detailed technical specification of the classic elements of vehicle dynamics and physical structure of the automated vehicle tests Draft specification of the autonomous environment and related communication infrastructure Technical proposal for autonomous vehicle public road testing ICT Working Group, 2017: BME HIT, BME KJIT, BPC, Ericsson, HUAWEI, Kapsch, Magyar Közút, Magyar Telekom, NFM, NMHH, Nokia, Oracle, RWE, Siemens, SWARCO, T-Systems, Vodafone (compared to the new members of the automotive working group) Detailed specification of the autonomous vehicle environment and related communication infrastructure Status of the project CONTINUOUS VALIDATION! 26

27 Decision on Public Investment Testing Zone Government of Hungary is Committed to Innovative Industries Capacity constraints in Europe in area of vehicle dynamic testing Technology change in vehicle industry single vehicle vs. co-operative vehicle control: different development environment is required Decision of Hungarian Government in 2016: contribution to the European automotive community Test field for classic and automated and connected vehicles in Hungary Status of the project 1000 km 27







28 Multi-level testing environment From computer to real traffic essential for automated driving Public road Limited public road Proving ground Laboratory Simulation XiSc Real public road environment Controlled public road tests: City / Rural-HW Controlled systemtest Component test, integration test Conceptual and feasability test Status of the project 28







29 Overview of the Layout of the Unique Proving Ground Traditional and autonomous testing modules 265 ha Concept is based on: Best practices from other similar facilities Business studies Environmental studies Office and workshops Development centres Development area Main entrance and control centre Development area c Customer zone R&D campus Service zone Next-door service providers / partners Innovation Center 76 Research center High-speed CAV testing Low-speed CAV testing Status of the project Related facilities (event center, etc.) 29








30 Multi-level testing environment Buildings and modules Control center Workshops and offices Main entrance building Service providers Innovation Center Research center, University building Status of the project Related buildings 30

 Phase 2:")

31 Definition of Project Phases Phase 1: (70MEUR) Phase 2: (70MEUR) Status of the project 31












32 Project Milestones and Basic data Preparations Announcement May 19, 2016 Project start fixed HSO position Sept 14, 2016 Agreement of Ministry & City Nov 04, 2016 Project preparation: Ground mechanics Geodesia Archeologic study Environmental study Ground-protection plans Ammunition discharge Parcel creation (zone plan) Feb-Apr 2017 Agreement with lead-designer Apr 19, 2017 Feb-Apr, 2017 Jun-Jul, 2016 Oct, 2016 Registration of Automotive Proving Ground Ltd. (project company) Pre-design activities: Proving Ground concept Earthwork plans Utility plans AD test zone concept Buildings concept Environmental design May 19, 2017 Groundbraking ceremony / Start of construction Publication of 292/2016 (VI.13.) and 1319/2016 (VII.1.) Governmental Decisions Status of the project 32











33 Project milestones and basic data VIDEO Dynamic platform May-Dec, 2017 End of Phase 1 Jun, 2018 High speed oval preparation PART I Oct, 2018 EREDETI TERVBEN: 2 ÉPÜLET Műszaki épület ~2.000 m 2 Aug, 2017-Jun, 2018 Fogadó épület ~2.000 m EREDETI TERVBEN: 2 2 ÉPÜLET Braking platform Műszaki épület ~2.000 m 2 Smart City Zone I. completition Handling course Status of the project ALTERNATÍV IRÁNY: 3 IPARI ÉPÜLET Buildings: Labor Fogadó és irodaépület main entrance, Internal roads as ~2.000 ~500 m 22 technical building, test roads control center Műszaki épület ~1.000 m 2 ALTERNATÍV IRÁNY: 3 IPARI ÉPÜLET Autószerelő műhely ~500 m 2 33






34 Project status Nov/2017 Status of the project 34









35 Project milestones and basic data PHASE 2 Smart City Zone II. High-speed oval completition Additional moduls: Slopes Kick-plate Bad roads Aquaplaning Noise measurement plate Additional buildings: University Research Center Related buildings Status of the project 35

36 Model of operation, Services
 Data collection (operation of sensory system) Data management (operation of cloud) Engineering Services Model of operation SERVICE")
37 Business & Operation Model Operation models will change Vehicle partners (OE, Tier1, ) Communication partner System partner Testing ZONE Modules (with classic services) Simulation (scenarios, cases, disturbances) Data collection (operation of sensory system) Data management (operation of cloud) Engineering Services Model of operation SERVICE CONTENT 37






38 Participation of the Testing Zone in the V-Model Services planned TEST PROGRAM EXECUTION USE CASE DEFINITION Platooning Connected vehicle control Special situations TEST PLANNING Model of operation 38


 B2 Sensor cluster B3 Data system")




39 Product Structure Service Line A A1 Modules A2 Linked modules A3 Modul services Service Line B B1 Traffic situations (trafic elements, barriers, etc.) B2 Sensor cluster B3 Data system B4 Standard tests Service Line C C1 Smart City Zalaegerszeg tests C2 Public road tests C3 Cross boarder tests Service Line D D1 Lab infrastructure and services D2 Simulation services D3 Usecase definitions Service Line E E1 Engineering services E2 Test track infrastructure E3 Special services 39
40 What can be tested?


41 Modules to be realized with Priority 1 Priority is defined with future customers What can be tested? 41

42 Proving Ground Modules Dynamic platform Physical parameters: 300m diameter asphalt surface Acceleration lane 760m and 400m long 20m wide FIA emergency area Watered surface (optional) Watered basalt surface at easter acceleration lane (phase 2.) 1% inclination to south Separated return way Autonomous vehicle test cases: Platooning at free trajectory Cooperative vehicle control at high and medium mue with different trajectories (double lane change, J-turn etc.) at stability limit (ABS, ESP activity) Fix position obstacle (dummy car or pedestrian) Euro NCAP scenarios Project Phase What can be tested? 42
 Blue basalt mue=~0.3 (wet) Treated concrete mue=~0.6 (wet) aquaplaning basin (max.")

43 Proving Ground Modules Braking platform Parameters: 6 different surfaces: Chess surface: asphalt/tiles asphalt mue=~1 (optional watering) tiles mue=~0.1 (wet) Blue basalt mue=~0.3 (wet) Treated concrete mue=~0.6 (wet) aquaplaning basin (max. 5cm wet depth) 200m surface length 750m acceleration lane 20m safety area at both side, 150m at the end Autonomous vehicle test cases: Platooning at physical limits; drive through or braking at various surfaces up to high speed Cooperative vehicle control at physical limit, moving or static obstacle, at various speeds during ABS, ATC, ESP activity Project Phase What can be tested? 43
 and high speed")




44 Proving Ground Modules Handling course Parameters: Low (60km/h) and high speed (120km/h) section 1.300m and 2000m length width: 6 and 12m 20m wide gravel covered safety zones Various topography V2X coverage for communication tests at various terrain Autonomous vehicle test cases: Platooning at medium speeds at diverse topography Cooperative vehicle control at diverse topography and limited visibility Project Phase What can be tested? 44

 Autonomous vehicle test cases:")


45 Proving Ground Modules Rural road Parameters: 500m 2x2 lane motorway 2500m 2x1 lane rural road Partly watered surface 5G test network V2X communication coverage GPS base station Public road like layout (junctions, road surface, geometry) Autonomous vehicle test cases: Platooning on rural road at realistic conditions, various type of junctions, roundabouts Diverse lane layout: 2x1, 2x2, 2+1, Diverse topography Moving and static obstacles Construction site situation Various road side elements: trees, fences, grass etc. Project Phase What can be tested? 45
 Autonomous vehicle test")
 Moving and static obstacles Construction site situation Multi level junction Project Phase 1 2017-2018 What")
46 Proving Ground MModules Motorway Parameters: 1500m 2 x 2+1 lane motorway 100m real tunnel Partly watered surface VMS, 5G test network V2X communication coverage GPS base station Public road like layout (junctions, road surface, geometry) Autonomous vehicle test cases: Platooning on motorway at realistic conditions, exits and entrances Platooning and cooperative control with limited communication (tunnel) Moving and static obstacles Construction site situation Multi level junction Project Phase What can be tested? 46






47 Proving Ground Modules SMART City Zone Separated Function Zones Low-speed, parking area 2. Multi-lane high speed area 3. Downtown area 4. Suburban area 5 5. T-junction area Project Phase What can be tested? 47

48 Proving Ground Modules Smart City Zone Parking house capacity for 60 cars 3 levels: 1. level wo natural light 2. level open concrete walls 3. level: open air design local V2X network for wallet parking configurable parking place layouts Technical plans 48



49 Proving Ground Modules Smart City Zone Buildings Technical plans Tech 49



50 Proving Ground Modules Smart City Zone Special features Communication network: Full V2X communication system Environmental impact measurement opportunity (e.g. noise, EMC, rain) High speed mobile network(lte, 5G) Database about the environment External measurement infrastructure: Drone carried camera DGPS Technical plans Technical parameters: Sticky lane markings Real test vehicles Old cars for scenery, special cars Traffic gantry with variable message sign Railway crossing, construction zone, pedestrian crossings, trees, moveable road signs, tunnel,, roadside objects, various street lights, SMART City features 50
 on high and low")


51 Proving Ground Modules Smart City Zone Test cases Low-speed platooning at various junctions and lane layout Emergency braking in city environment with different barriers (static, moving) on high and low friction surface Cooperative tests with vehicles, pedestrians, bikers etc. Different parking situations: parking house, valet parking, park assistant, different layouts, smart parking Intelligent logistic yard Different road construction zone scenarios in city environment Different road side objects: buildings, trees, parking cars, used road signs, fences, dust-bin etc. Changing weather conditions (rain) Technical plans 51

52 Proving Ground Modules Communication network 3 level approach: 1st level: ITS G5 basic V2X test enviroment 2nd level: V2X developer enviroment:freely configurable, open interface for application developers, full data logging infrstructure 3rd level: fully customer defined test environment 5G cellular test network for future ITS applications Redundant layout for paralell customer networks What can be tested? 52






53 Construction of Complex Test Scenarios Opportunities for the Scenario-in-the-Loop (SciL) Simulation Track Traffic Simulation Software Maneuver execution Localization Movable Objects and Disturbances Vehicle Running offboard What can be tested? 53



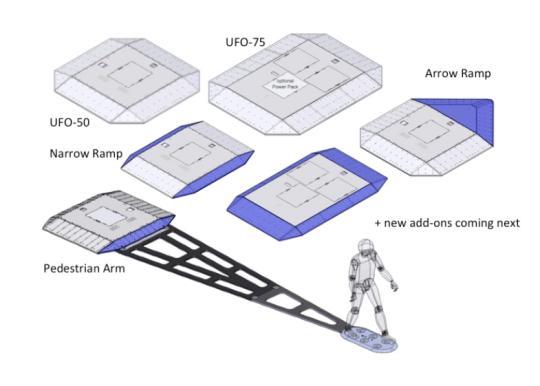

54 Construction of Complex Test Scenarios Dummys and UFO s What can be tested? 54



55 Leaving the Closed Testing Environment Zalaegerszeg as Smart/Digitalized City environment for Testing Test track modules and scenarios for controlled and repeatable tests in a safe environment City environment for random real-life testing What can be tested? 55

56 Public Road Tests Possible test sites in Zalaegerszeg What can be tested? 56
 Loop_3: International roads (Graz-Zalaegerszeg-Maribor zone) What can be tested?")
57 Leaving the Closed Testing Environment High speed testing in real environment Triple loop Loop_1: In citiy Local roads (City Zalaegerszeg) smart infrastruktúra Loop_2: Hungarian roads (Zalaegerszeg-Gyor-Budapest) Loop_3: International roads (Graz-Zalaegerszeg-Maribor zone) What can be tested? 57





58 Public Road Tests Public roads with autonomous test focus: R76, newly built Testing opportunities 58









59 ZALAZONE - Region Zala What do we offer? 59
The Digital Future of Driving Dr. László Palkovics State Secretary for Education
 The Digital Future of Driving Dr. László Palkovics State Secretary for Education 1. WHAT IS THE CHALLENGE? What is the challenge? Mobility Challenges Inspirating factors for development 1 Zero Emission
The Digital Future of Driving Dr. László Palkovics State Secretary for Education 1. WHAT IS THE CHALLENGE? What is the challenge? Mobility Challenges Inspirating factors for development 1 Zero Emission
IMPACT OF DIGITAL TRANSFORMATION TO THE HUNGARIAN AUTOMOTIVE SECTOR
 IMPACT OF DIGITAL TRANSFORMATION TO THE HUNGARIAN AUTOMOTIVE SECTOR Automotive Background Strong scientific community for autonomous vehicle technology research Hungary s automotive sector quietly goes
IMPACT OF DIGITAL TRANSFORMATION TO THE HUNGARIAN AUTOMOTIVE SECTOR Automotive Background Strong scientific community for autonomous vehicle technology research Hungary s automotive sector quietly goes
Validation difficulties and testing challenges of connected and automated vehicles. Prof. Zsolt SZALAY
 Validation difficulties and testing challenges of connected and automated vehicles Prof. Zsolt SZALAY Topics of the presentation 1. Why disruptive? 2. The key elements of education 3. Hungary s answers
Validation difficulties and testing challenges of connected and automated vehicles Prof. Zsolt SZALAY Topics of the presentation 1. Why disruptive? 2. The key elements of education 3. Hungary s answers
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
The connected vehicle is the better vehicle!
 AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
AdaptIVe: Automated driving applications and technologies for intelligent vehicles
 Jens Langenberg Aachen 06 October 2015 AdaptIVe: Automated driving applications and technologies for intelligent vehicles Facts Budget: European Commission: EUR 25 Million EUR 14,3 Million Duration: 42
Jens Langenberg Aachen 06 October 2015 AdaptIVe: Automated driving applications and technologies for intelligent vehicles Facts Budget: European Commission: EUR 25 Million EUR 14,3 Million Duration: 42
Test & Validation Challenges Facing ADAS and CAV
 Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
CONNECTED AUTOMATION HOW ABOUT SAFETY?
 CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
PSA Peugeot Citroën Driving Automation and Connectivity
 PSA Peugeot Citroën Driving Automation and Connectivity June 2015 Automation Driver Levels of Automated Driving Driver continuously performs the longitudinal and lateral dynamic driving task Driver continuously
PSA Peugeot Citroën Driving Automation and Connectivity June 2015 Automation Driver Levels of Automated Driving Driver continuously performs the longitudinal and lateral dynamic driving task Driver continuously
Future mechatronical platform for easy application of assistant systems - EU-project
 Future mechatronical platform for easy application of assistant systems - EU-project PEIT PEIT - Powertrain Equipped with Intelligent Technology Feierlich wissenschaftliche Tagung der Ungarischen Akademie
Future mechatronical platform for easy application of assistant systems - EU-project PEIT PEIT - Powertrain Equipped with Intelligent Technology Feierlich wissenschaftliche Tagung der Ungarischen Akademie
Aria Etemad Volkswagen Group Research. Key Results. Aachen 28 June 2017
 Aria Etemad Volkswagen Group Research Key Results Aachen 28 June 2017 28 partners 2 // 28 June 2017 AdaptIVe Final Event, Aachen Motivation for automated driving functions Zero emission Reduction of fuel
Aria Etemad Volkswagen Group Research Key Results Aachen 28 June 2017 28 partners 2 // 28 June 2017 AdaptIVe Final Event, Aachen Motivation for automated driving functions Zero emission Reduction of fuel
Advanced Vehicle Control System Development Div.
 Autonomous Driving Technologies for Advanced Driver Assist System Toyota Motor Corporation Advanced Vehicle Control System Development Div. Hiroyuki KANEMITSU Contents 1. Definition of automated driving.
Autonomous Driving Technologies for Advanced Driver Assist System Toyota Motor Corporation Advanced Vehicle Control System Development Div. Hiroyuki KANEMITSU Contents 1. Definition of automated driving.
THE WAY TO HIGHLY AUTOMATED DRIVING.
 December 15th, 2014. THE WAY TO HIGHLY AUTOMATED DRIVING. DR. WERNER HUBER, HEAD OF DRIVER ASSISTANCE AND PERCEPTION AT BMW GROUP RESEARCH AND TECHNOLOGY. AUTOMATION IS AN ESSENTIAL FEATURE OF THE INTELLIGENT
December 15th, 2014. THE WAY TO HIGHLY AUTOMATED DRIVING. DR. WERNER HUBER, HEAD OF DRIVER ASSISTANCE AND PERCEPTION AT BMW GROUP RESEARCH AND TECHNOLOGY. AUTOMATION IS AN ESSENTIAL FEATURE OF THE INTELLIGENT
Research Challenges for Automated Vehicles
 Research Challenges for Automated Vehicles Steven E. Shladover, Sc.D. University of California, Berkeley October 10, 2005 1 Overview Reasons for automating vehicles How automation can improve efficiency
Research Challenges for Automated Vehicles Steven E. Shladover, Sc.D. University of California, Berkeley October 10, 2005 1 Overview Reasons for automating vehicles How automation can improve efficiency
Autonomous Automated and Connected Vehicles
 Autonomous Automated and Connected Vehicles February 25, 2015 Bernard C. Soriano, Ph.D. Deputy Director, California DMV California Legislation Senate Bill 1298 As soon as practicable, but no later than
Autonomous Automated and Connected Vehicles February 25, 2015 Bernard C. Soriano, Ph.D. Deputy Director, California DMV California Legislation Senate Bill 1298 As soon as practicable, but no later than
Highly Automated Driving: Fiction or Future?
 The future of driving. Final Event Highly Automated Driving: Fiction or Future? Prof. Dr. Jürgen Leohold Volkswagen Group Research Motivation The driver as the unpredictable factor: Human error is the
The future of driving. Final Event Highly Automated Driving: Fiction or Future? Prof. Dr. Jürgen Leohold Volkswagen Group Research Motivation The driver as the unpredictable factor: Human error is the
Cooperative Autonomous Driving and Interaction with Vulnerable Road Users
 9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
Automated driving in urban environments: technical challenges, open problems and barriers. Fawzi Nashashibi
 Automated driving in urban environments: technical challenges, open problems and barriers Fawzi Nashashibi 6th Workshop on Planning, Perception and Navigation for Intelligent Vehicles SEPTEMBER 14, 2014
Automated driving in urban environments: technical challenges, open problems and barriers Fawzi Nashashibi 6th Workshop on Planning, Perception and Navigation for Intelligent Vehicles SEPTEMBER 14, 2014
Tips & Technology For Bosch business partners
 Tips & Technology For Bosch business partners Current topics for successful workshops No. 70/2013 Electrics / Electronics Automated driving The future of mobility High-performance driver assistance systems
Tips & Technology For Bosch business partners Current topics for successful workshops No. 70/2013 Electrics / Electronics Automated driving The future of mobility High-performance driver assistance systems
Safety Considerations of Autonomous Vehicles. Darren Divall Head of International Road Safety TRL
 Safety Considerations of Autonomous Vehicles Darren Divall Head of International Road Safety TRL TRL History Autonomous Vehicles TRL Self-driving car, 1960s Testing partial automation, TRL, 2000s Testing
Safety Considerations of Autonomous Vehicles Darren Divall Head of International Road Safety TRL TRL History Autonomous Vehicles TRL Self-driving car, 1960s Testing partial automation, TRL, 2000s Testing
IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017
 IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017 AUTOMATED DRIVING OPENS NEW OPPORTUNITIES FOR CUSTOMERS AND COMMUNITY. MORE SAFETY MORE COMFORT MORE FLEXIBILITY MORE
IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017 AUTOMATED DRIVING OPENS NEW OPPORTUNITIES FOR CUSTOMERS AND COMMUNITY. MORE SAFETY MORE COMFORT MORE FLEXIBILITY MORE
PORTUGUESE NETWORK FOR C-ITS
 PORTUGUESE NETWORK FOR C-ITS Rui Alves 28/11/2017 22.12.2017 www.c-roads.eu 1 Agenda GMV in ITS GMV in C-ROADS C-ITS perspective for the future 22.12.2017 www.c-roads.eu 2 Agenda GMV in ITS GMV in C-ROADS
PORTUGUESE NETWORK FOR C-ITS Rui Alves 28/11/2017 22.12.2017 www.c-roads.eu 1 Agenda GMV in ITS GMV in C-ROADS C-ITS perspective for the future 22.12.2017 www.c-roads.eu 2 Agenda GMV in ITS GMV in C-ROADS
J.P. Morgan Fieldtrip. Anton Poll Head of Financial Communication/ Financial Analysis, AUDI AG
 J.P. Morgan Fieldtrip Anton Poll Head of Financial Communication/ Financial Analysis, AUDI AG performance robust KPIs 2017 Deliveries slightly above prior year $ Revenue slightly above prior year Operating
J.P. Morgan Fieldtrip Anton Poll Head of Financial Communication/ Financial Analysis, AUDI AG performance robust KPIs 2017 Deliveries slightly above prior year $ Revenue slightly above prior year Operating
Automated Vehicles: Terminology and Taxonomy
 Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
Optimal energy efficiency, vehicle stability and safety on the OpEneR EV with electrified front and rear axles
 Optimal energy efficiency, vehicle stability and safety on the OpEneR EV with electrified front and rear axles Berlin, Monday 17 June 2013 Dr. Stephen Jones, AVL Emre Kural, AVL Alexander Massoner, AVL
Optimal energy efficiency, vehicle stability and safety on the OpEneR EV with electrified front and rear axles Berlin, Monday 17 June 2013 Dr. Stephen Jones, AVL Emre Kural, AVL Alexander Massoner, AVL
2018 Schaeffler Symposium 9/6/2018 Philip A. George Foundations of Disruption Preparing for the Uncertainty of Tomorrow s Personal Mobility Challenge
 1 Current Situation in Mobility Disruptive Changes? dis rup tion: [disˈrəpsh(ə)n] noun disturbance or problems which interrupt an event, activity, or process Influence of Global and Current Trends on Mobility
1 Current Situation in Mobility Disruptive Changes? dis rup tion: [disˈrəpsh(ə)n] noun disturbance or problems which interrupt an event, activity, or process Influence of Global and Current Trends on Mobility
The Role of Infrastructure Connected to Cars & Autonomous Driving INFRAMIX PROJECT
 The Role of Infrastructure Connected to Cars & Autonomous Driving INFRAMIX PROJECT 20-11-18 1 Index 01 Abertis Autopistas 02 Introduction 03 Road map AV 04 INFRAMIX project 05 Test site autopistas 06 Classification
The Role of Infrastructure Connected to Cars & Autonomous Driving INFRAMIX PROJECT 20-11-18 1 Index 01 Abertis Autopistas 02 Introduction 03 Road map AV 04 INFRAMIX project 05 Test site autopistas 06 Classification
Connected vehicles on European roads: benefits for safety and traffic management
 Connected vehicles on European roads: benefits for safety and traffic management Luciano Altomare Centro Ricerche Fiat Workshop Klimamobility 2017 April, 20 th 2017 Index V2X evolution in Europe: regulatory
Connected vehicles on European roads: benefits for safety and traffic management Luciano Altomare Centro Ricerche Fiat Workshop Klimamobility 2017 April, 20 th 2017 Index V2X evolution in Europe: regulatory
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE. CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development
 AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
Copyright 2016 by Innoviz All rights reserved. Innoviz
 Innoviz 0 Cutting Edge 3D Sensing to Enable Fully Autonomous Vehicles May 2017 Innoviz 1 Autonomous Vehicles Industry Overview Innoviz 2 Autonomous Vehicles From Vision to Reality Uber Google Ford GM 3
Innoviz 0 Cutting Edge 3D Sensing to Enable Fully Autonomous Vehicles May 2017 Innoviz 1 Autonomous Vehicles Industry Overview Innoviz 2 Autonomous Vehicles From Vision to Reality Uber Google Ford GM 3
Near-Term Automation Issues: Use Cases and Standards Needs
 Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
RESEARCH FUNDING KEY TO AUTONOMOUS DRIVING
 DRIVING FUTURE PLATFORM - MARCH 07 2018 RESEARCH FUNDING KEY TO AUTONOMOUS DRIVING DR. ECKARD STEIGER ROBERT BOSCH GMBH Automated Driving Key Element of Future Mobility Connected mobility Automated mobility
DRIVING FUTURE PLATFORM - MARCH 07 2018 RESEARCH FUNDING KEY TO AUTONOMOUS DRIVING DR. ECKARD STEIGER ROBERT BOSCH GMBH Automated Driving Key Element of Future Mobility Connected mobility Automated mobility
THE FUTURE OF AUTONOMOUS CARS
 Index Table of Contents Table of Contents... i List of Figures... ix Executive summary... 1 1 Introduction to autonomous cars... 3 1.1 Definitions and classifications... 3 1.2 Brief history of autonomous
Index Table of Contents Table of Contents... i List of Figures... ix Executive summary... 1 1 Introduction to autonomous cars... 3 1.1 Definitions and classifications... 3 1.2 Brief history of autonomous
Deep Learning Will Make Truly Self-Driving Cars a Reality
 Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
18th ICTCT Workshop, Helsinki, October Technical feasibility of safety related driving assistance systems
 18th ICTCT Workshop, Helsinki, 27-28 October 2005 Technical feasibility of safety related driving assistance systems Meng Lu Radboud University Nijmegen, The Netherlands, m.lu@fm.ru.nl Kees Wevers NAVTEQ,
18th ICTCT Workshop, Helsinki, 27-28 October 2005 Technical feasibility of safety related driving assistance systems Meng Lu Radboud University Nijmegen, The Netherlands, m.lu@fm.ru.nl Kees Wevers NAVTEQ,
Ensuring the safety of automated vehicles
 Ensuring the safety of automated vehicles Alan Stevens Workshop on Verification and Validation for Autonomous Road Vehicles 4 Nov 2016 1 Agenda / Table of contents 1 2 3 Planning trials and safety Estimating
Ensuring the safety of automated vehicles Alan Stevens Workshop on Verification and Validation for Autonomous Road Vehicles 4 Nov 2016 1 Agenda / Table of contents 1 2 3 Planning trials and safety Estimating
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm)
") Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) ADAS and Automated Driving Functionality Blessing and Curse Alfred Eckert, Head
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) ADAS and Automated Driving Functionality Blessing and Curse Alfred Eckert, Head
WHITE PAPER Autonomous Driving A Bird s Eye View
 WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
AUTONOMOUS DRIVING COLLABORATIVE APPROACH NEEDED FOR BIG BUSINESS. Innovation Bazaar, Vehicle ICT Arena ver 2. RISE Viktoria Kent Eric Lång
 AUTONOMOUS DRIVING COLLABORATIVE APPROACH NEEDED FOR BIG BUSINESS Innovation Bazaar, Vehicle ICT Arena 2018-02-08 ver 2 Research Institutes of Sweden RISE Viktoria Kent Eric Lång 2 AUTONOMOUS DRIVING AND
AUTONOMOUS DRIVING COLLABORATIVE APPROACH NEEDED FOR BIG BUSINESS Innovation Bazaar, Vehicle ICT Arena 2018-02-08 ver 2 Research Institutes of Sweden RISE Viktoria Kent Eric Lång 2 AUTONOMOUS DRIVING AND
ZF Advances Key Technologies for Automated Driving
 Page 1/5, January 9, 2017 ZF Advances Key Technologies for Automated Driving ZF s See Think Act supports self-driving cars and trucks ZF and NVIDIA provide computing power to bring artificial intelligence
Page 1/5, January 9, 2017 ZF Advances Key Technologies for Automated Driving ZF s See Think Act supports self-driving cars and trucks ZF and NVIDIA provide computing power to bring artificial intelligence
On the role of AI in autonomous driving: prospects and challenges
 On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
Autonomous Driving. AT VOLVO CARS Jonas Ekmark Manager Innovations, Volvo Car Group
 Autonomous Driving AT VOLVO CARS Jonas Ekmark Manager Innovations, Volvo Car Group Global megatrends Continued urbanisation Growing number of megacities Air quality major health issue Traffic accidents
Autonomous Driving AT VOLVO CARS Jonas Ekmark Manager Innovations, Volvo Car Group Global megatrends Continued urbanisation Growing number of megacities Air quality major health issue Traffic accidents
Connected Vehicles. V2X technology.
 EN Kapsch TrafficCom Connected Vehicles. V2X technology. Cooperative Intelligent Transportation Systems (C-ITS) are based on the communication between vehicles and infrastructure (V2I, or vehicle to infrastructure
EN Kapsch TrafficCom Connected Vehicles. V2X technology. Cooperative Intelligent Transportation Systems (C-ITS) are based on the communication between vehicles and infrastructure (V2I, or vehicle to infrastructure
BMW GROUP TECHNOLOGY WORKSHOPS AUTOMATED DRIVING-DIGITALIZATION MOBILITY SERVICES. December 2016
 BMW GROUP TECHNOLOGY WORKSHOPS AUTOMATED DRIVING-DIGITALIZATION MOBILITY SERVICES December 2016 DISCLAIMER. This document contains forward-looking statements that reflect BMW Group s current views about
BMW GROUP TECHNOLOGY WORKSHOPS AUTOMATED DRIVING-DIGITALIZATION MOBILITY SERVICES December 2016 DISCLAIMER. This document contains forward-looking statements that reflect BMW Group s current views about
AUTOPILOT Webinar Series (II): Developing Automated Driving Pilots for IoT: Brainport
: Developing Automated Driving Pilots for IoT: Brainport") AUTOPILOT Webinar Series (II): Developing Automated Driving Pilots for IoT: Brainport 31 May 2018 16.00-17.00 CET 31/05/2018 This project has received funding from the European Union s Horizon 2020 research
AUTOPILOT Webinar Series (II): Developing Automated Driving Pilots for IoT: Brainport 31 May 2018 16.00-17.00 CET 31/05/2018 This project has received funding from the European Union s Horizon 2020 research
5G V2X. The automotive use-case for 5G. Dino Flore 5GAA Director General
 5G V2X The automotive use-case for 5G Dino Flore 5GAA Director General WHY According to WHO, there were about 1.25 million road traffic fatalities worldwide in 2013, with another 20 50 million injured
5G V2X The automotive use-case for 5G Dino Flore 5GAA Director General WHY According to WHO, there were about 1.25 million road traffic fatalities worldwide in 2013, with another 20 50 million injured
Traffic Operations with Connected and Automated Vehicles
 Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
The Role of Intelligent Transport Systems in Road Safety and Logistics
 The Role of Intelligent Transport Systems in Road Safety and Logistics Mike van Tonder Aurecon and President ITS SA PRESENTATION CONTENT 1. What are Intelligent Transport Systems (ITS)? 2. What Types of
The Role of Intelligent Transport Systems in Road Safety and Logistics Mike van Tonder Aurecon and President ITS SA PRESENTATION CONTENT 1. What are Intelligent Transport Systems (ITS)? 2. What Types of
Robert Bosch Australia: Advice on automated and zero emission vehicle infrastructure for Infrastructure Victoria
 Robert Bosch Australia: Advice on automated and zero emission vehicle infrastructure for Infrastructure Victoria Executive Summary The Bosch Group is a leading global supplier of technology and services
Robert Bosch Australia: Advice on automated and zero emission vehicle infrastructure for Infrastructure Victoria Executive Summary The Bosch Group is a leading global supplier of technology and services
Economic and Social Council
 United Nations Economic and Social Council ECE/TRANS/WP.29/2017/145 Distr.: General 11 October 2017 English only Economic Commission for Europe Inland Transport Committee World Forum for Harmonization
United Nations Economic and Social Council ECE/TRANS/WP.29/2017/145 Distr.: General 11 October 2017 English only Economic Commission for Europe Inland Transport Committee World Forum for Harmonization
APCO International. Emerging Technology Forum
 APCO International Emerging Technology Forum Emerging Vehicle to Vehicle, Vehicle to Infrastructure Communications Cars talking to each other and talking to the supporting highway infrastructure The Regulatory
APCO International Emerging Technology Forum Emerging Vehicle to Vehicle, Vehicle to Infrastructure Communications Cars talking to each other and talking to the supporting highway infrastructure The Regulatory
National Road Safety Action Plan in China
 Sixth SHRP 2 Safety Research Symposium National Road Safety Action Plan in China Dr. Yan Wang July 14, 2011 Washington DC, USA Outline 1 Initiative of Road Safety Action Plan 2 Phase I 3 For Next Phase?
Sixth SHRP 2 Safety Research Symposium National Road Safety Action Plan in China Dr. Yan Wang July 14, 2011 Washington DC, USA Outline 1 Initiative of Road Safety Action Plan 2 Phase I 3 For Next Phase?
G4 Apps. Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013
 Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013 Reducing costs, emissions. Improving mobility, efficiency. Safe Broadband Wireless Operations Fusion: Vehicles-Agencies Technologies,
Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013 Reducing costs, emissions. Improving mobility, efficiency. Safe Broadband Wireless Operations Fusion: Vehicles-Agencies Technologies,
Intelligent vehicle concept based on
 # * $ # # + * +,.//0-8 + 1 ' + ( + ' $ ' + - # 4,, + - + ( $ 5 4-8 5 7 ' ' $ 5 : ; ' ( $, 6 & + 3 ' 5 $, 5-2 $ 1 1 + - & *'./0/ * 1 ' ' $ # $& + * ' 9 1 & # 1 :5 7 4-5 9 > 8 & * ' 0 7 >4 4?- 8 4
# * $ # # + * +,.//0-8 + 1 ' + ( + ' $ ' + - # 4,, + - + ( $ 5 4-8 5 7 ' ' $ 5 : ; ' ( $, 6 & + 3 ' 5 $, 5-2 $ 1 1 + - & *'./0/ * 1 ' ' $ # $& + * ' 9 1 & # 1 :5 7 4-5 9 > 8 & * ' 0 7 >4 4?- 8 4
MEMS Sensors for automotive safety. Marc OSAJDA, NXP Semiconductors
 MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions
 Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions GTC Europe 2017 Dominik Dörr 2 Motivation Virtual Prototypes Virtual Sensor Models CarMaker and NVIDIA DRIVE PX
Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions GTC Europe 2017 Dominik Dörr 2 Motivation Virtual Prototypes Virtual Sensor Models CarMaker and NVIDIA DRIVE PX
Citi's 2016 Car of the Future Symposium
 Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
Autonomous Vehicles. Conceição Magalhães 3 rd AUTOCITS workshop, October 10 th, Infrastructure Overview
 Autonomous Vehicles Conceição Magalhães 3 rd AUTOCITS workshop, October 10 th, 2017 Infrastructure Overview Planning for today 1 Current situation 2 AVs interaction approaches 3 Ongoing projects 4 Conclusions
Autonomous Vehicles Conceição Magalhães 3 rd AUTOCITS workshop, October 10 th, 2017 Infrastructure Overview Planning for today 1 Current situation 2 AVs interaction approaches 3 Ongoing projects 4 Conclusions
Safety for Self-driving Cars
 Tech.AD. 5-6 March, 2018 Berlin Safety for Self-driving Safety for Cars Self-driving Cars -Challenges and Some Solutions -Challenges and Some Solutions Author: Håkan Sivencrona, PhD Functional Jonas Nilsson,
Tech.AD. 5-6 March, 2018 Berlin Safety for Self-driving Safety for Cars Self-driving Cars -Challenges and Some Solutions -Challenges and Some Solutions Author: Håkan Sivencrona, PhD Functional Jonas Nilsson,
ZF Mitigates Rear-End Collisions with New Electronic Safety Assistant for Trucks
 Page 1/6, 2016-06-29 ZF Mitigates Rear-End Collisions with New Electronic Safety Assistant for Trucks The Evasive Maneuver Assist (EMA), developed with project partner WABCO, automatically steers tractor-trailers
Page 1/6, 2016-06-29 ZF Mitigates Rear-End Collisions with New Electronic Safety Assistant for Trucks The Evasive Maneuver Assist (EMA), developed with project partner WABCO, automatically steers tractor-trailers
AND CHANGES IN URBAN MOBILITY PATTERNS
 TECHNOLOGY-ENABLED MOBILITY: Virtual TEsting of Autonomous Vehicles AND CHANGES IN URBAN MOBILITY PATTERNS Technology-Enabled Mobility In the era of the digital revolution everything is inter-connected.
TECHNOLOGY-ENABLED MOBILITY: Virtual TEsting of Autonomous Vehicles AND CHANGES IN URBAN MOBILITY PATTERNS Technology-Enabled Mobility In the era of the digital revolution everything is inter-connected.
Intelligent Drive next LEVEL
 Daimler AG Dr. Eberhard Zeeb Senior Manager Function and Software Driver Assistance Systems Intelligent Drive next LEVEL on the way towards autonomous driving Pioneers of the Automobile Bertha Benz 1888
Daimler AG Dr. Eberhard Zeeb Senior Manager Function and Software Driver Assistance Systems Intelligent Drive next LEVEL on the way towards autonomous driving Pioneers of the Automobile Bertha Benz 1888
Driver assistance systems and outlook into automated driving
 Driver assistance systems and outlook into automated driving EAEC-ESFA2015 Bucharest November 2015 1 General presentation of the Bosch Group Some 45,600 1 researchers and developers work at Bosch: at 94
Driver assistance systems and outlook into automated driving EAEC-ESFA2015 Bucharest November 2015 1 General presentation of the Bosch Group Some 45,600 1 researchers and developers work at Bosch: at 94
AUTOMATED DRIVING IN EUROPE
 AUTOMATED DRIVING IN EUROPE SIP-ADUS WORKSHOP TOKYO 14.11.2017 DR. HELGE NEUNER HISTORY OF AUTOMATED DRIVING @ VOLKSWAGEN GROUP RESEARCH Stanley Junior PAUL (2005) (2007) (2007) icar HAVEit et Follow me!
AUTOMATED DRIVING IN EUROPE SIP-ADUS WORKSHOP TOKYO 14.11.2017 DR. HELGE NEUNER HISTORY OF AUTOMATED DRIVING @ VOLKSWAGEN GROUP RESEARCH Stanley Junior PAUL (2005) (2007) (2007) icar HAVEit et Follow me!
Automated and connected driving Defining the testing of future mobility technology
 Automated and connected driving Defining the testing of future mobility technology 1 DEKRA takes the initiative Combining facilities, expertise and know-how Our two existing facilities in Germany and Spain
Automated and connected driving Defining the testing of future mobility technology 1 DEKRA takes the initiative Combining facilities, expertise and know-how Our two existing facilities in Germany and Spain
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF
 AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
VEDECOM. Institute for Energy Transition. Presentation
 VEDECOM Institute for Energy Transition Presentation version 30/01/2017 TABLE OF CONTENTS 2 1. A research ecosystem unparalleled in France 2. PFA NFI - VEDECOM 3. Corporate film 4. Aim and vision of VEDECOM
VEDECOM Institute for Energy Transition Presentation version 30/01/2017 TABLE OF CONTENTS 2 1. A research ecosystem unparalleled in France 2. PFA NFI - VEDECOM 3. Corporate film 4. Aim and vision of VEDECOM
Intelligent Vehicle Systems
 Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
Új technológiák a közlekedésbiztonság jövőjéért
 Új technológiák a közlekedésbiztonság jövőjéért Dr. Szászi István Occupant Safety Robert Bosch Kft. 1 Outline 1. Active and Passive Safety - definition 2. Driver Information Functions 3. Driver Assistance
Új technológiák a közlekedésbiztonság jövőjéért Dr. Szászi István Occupant Safety Robert Bosch Kft. 1 Outline 1. Active and Passive Safety - definition 2. Driver Information Functions 3. Driver Assistance
About Automated Driving Functions
 About Automated Driving Functions Scenarios & Challenges Luisa Andreone FCA, Centro Ricerche FIAT ERTRAC Annual Conference Brussel, March 2015 Vehicle automation scenarios EVOLUTION on the ground / with
About Automated Driving Functions Scenarios & Challenges Luisa Andreone FCA, Centro Ricerche FIAT ERTRAC Annual Conference Brussel, March 2015 Vehicle automation scenarios EVOLUTION on the ground / with
C A. Right on track to enhanced driving safety. CAPS - Combined Active & Passive Safety. Robert Bosch GmbH CC/PJ-CAPS: Jochen Pfäffle
 Right on track to enhanced driving safety C A SP Robert Bosch GmbH CC/PJ-CAPS: Jochen Pfäffle 1 Outline CAPS motivation & content of activity Accident analysis & development methodology Market, drivers,
Right on track to enhanced driving safety C A SP Robert Bosch GmbH CC/PJ-CAPS: Jochen Pfäffle 1 Outline CAPS motivation & content of activity Accident analysis & development methodology Market, drivers,
State of the art in autonomous driving. German Aerospace Center DLR Institute of transportation systems
 DLR.de Chart 1 State of the art in autonomous driving German Aerospace Center DLR Institute of transportation systems Smart Cities Symposium Prague 2017 Dr.-Ing. Reza Dariani DLR.de Chart 2 DLR at a glance
DLR.de Chart 1 State of the art in autonomous driving German Aerospace Center DLR Institute of transportation systems Smart Cities Symposium Prague 2017 Dr.-Ing. Reza Dariani DLR.de Chart 2 DLR at a glance
Siemens ADAS. Collision avoidance as the first step towards autonomous driving
 Siemens ADAS Collision avoidance as the first step towards autonomous driving siemens.com/mobility-services Advanced Driver Assistance Systems help to avoid collisions and represent the first step towards
Siemens ADAS Collision avoidance as the first step towards autonomous driving siemens.com/mobility-services Advanced Driver Assistance Systems help to avoid collisions and represent the first step towards
Audi piloted driving. Audi piloted driving. Daniel Lipinski, Electronic Research Lab, Volkswagen Group of America
 1 Daniel Lipinski, Electronic Research Lab, Volkswagen Group of America Audi goals for piloted driving The potential for driver assistance and integral safety functions lies with driver support other Technical
1 Daniel Lipinski, Electronic Research Lab, Volkswagen Group of America Audi goals for piloted driving The potential for driver assistance and integral safety functions lies with driver support other Technical
MAKING CARS SMARTER ODOT Planning Conference Transporting Technology Connected & Autonomous Vehicles
 MAKING CARS SMARTER 2016 ODOT Planning Conference Transporting Technology Connected & Autonomous Vehicles WHY VEHICLE AUTOMATION? 35,200 motor vehicle deaths in 2015 Safety Aging Society Energy/ Congestion
MAKING CARS SMARTER 2016 ODOT Planning Conference Transporting Technology Connected & Autonomous Vehicles WHY VEHICLE AUTOMATION? 35,200 motor vehicle deaths in 2015 Safety Aging Society Energy/ Congestion
Cooperative brake technology
 Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
EPSRC-JLR Workshop 9th December 2014 TOWARDS AUTONOMY SMART AND CONNECTED CONTROL
 EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
The Development of ITS Technology, Current Challenges and Future Prospects Antonio Perlot Secretary General
 The Development of ITS Technology, Current Challenges and Future Prospects Antonio Perlot Secretary General VI International Conference on European Traffic Policies Session: Research and Technology Applied
The Development of ITS Technology, Current Challenges and Future Prospects Antonio Perlot Secretary General VI International Conference on European Traffic Policies Session: Research and Technology Applied
The Imperative to Deploy. Automated Driving. CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper
 Stepper") The Imperative to Deploy 1 Automated Driving CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper 2 Paths to the Car of the Future costs roaming e-bike driving enjoyment hybrid electric
The Imperative to Deploy 1 Automated Driving CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper 2 Paths to the Car of the Future costs roaming e-bike driving enjoyment hybrid electric
Daimler Trucks. Supporting the driver in conserving energy and reducing emissions - Daimler Trucks ecodriver assistance experience - Roland Trauter
 Roland Trauter Supporting the driver in conserving energy and reducing emissions - Daimler Trucks ecodriver assistance experience - EGVIA Workshop European funded project results: Reduction of CO2 emissions
Roland Trauter Supporting the driver in conserving energy and reducing emissions - Daimler Trucks ecodriver assistance experience - EGVIA Workshop European funded project results: Reduction of CO2 emissions
THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA.
 GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
Informal Document ACSF Automatically Commanded Steering Function
 Informal Document ACSF-01-02 Automatically Commanded Steering Function Contents of the presentation 1. Background Examples of Automated Driving Technologies Examples of the projects for Automated Driving
Informal Document ACSF-01-02 Automatically Commanded Steering Function Contents of the presentation 1. Background Examples of Automated Driving Technologies Examples of the projects for Automated Driving
Control as a Service (CaaS)
") Control as a Service (CaaS) Cloud-based Software Architecture for Automotive Control Applications Hasan Esen*, Hideaki Tanaka +, Akihito Iwai # DENSO (*Europe, + Japan, # Silicon Valley) Masakazu Adachi
Control as a Service (CaaS) Cloud-based Software Architecture for Automotive Control Applications Hasan Esen*, Hideaki Tanaka +, Akihito Iwai # DENSO (*Europe, + Japan, # Silicon Valley) Masakazu Adachi
Driving simulation and Scenario Factory for Automated Vehicle validation
 Driving simulation and Scenario Factory for Automated Vehicle validation Pr. Andras Kemeny Scientific Director, A. V. Simulation Expert Leader, Renault INDEX 1. Introduction of autonomous driving 2. Validation
Driving simulation and Scenario Factory for Automated Vehicle validation Pr. Andras Kemeny Scientific Director, A. V. Simulation Expert Leader, Renault INDEX 1. Introduction of autonomous driving 2. Validation
«From human driving to automated driving"
 «From human driving to automated driving" Jacques Ehrlich Head of LIVIC Jacques.ehrlich@ifsttar.fr March 19, 2012 Why automation? Automation is a global answer to four important societal issues Some definition
«From human driving to automated driving" Jacques Ehrlich Head of LIVIC Jacques.ehrlich@ifsttar.fr March 19, 2012 Why automation? Automation is a global answer to four important societal issues Some definition
Brignolo Roberto, CRF ETSI Workshop Feb, , Sophia Antipolis
 SAFESPOT Integrated Project Co-operative operative Systems for Road Safety Smart Vehicles on Smart Roads Brignolo Roberto, CRF Roberto.Brignolo@crf.it 1 General figures Project type: Integrated Project
SAFESPOT Integrated Project Co-operative operative Systems for Road Safety Smart Vehicles on Smart Roads Brignolo Roberto, CRF Roberto.Brignolo@crf.it 1 General figures Project type: Integrated Project
Volvo outlook on vehicle automation
 Volvo outlook on vehicle automation Lars Bjelkeflo, Advanced Technology and Research Kärnvärden Drivers for automation of commercial vehicles Safety Environmental Productivity & Cost Safety Active Safety
Volvo outlook on vehicle automation Lars Bjelkeflo, Advanced Technology and Research Kärnvärden Drivers for automation of commercial vehicles Safety Environmental Productivity & Cost Safety Active Safety
EATA European Automotive and Telecom Alliance
 EATA European Automotive and Telecom Alliance EATA: a new Alliance Founded by six associations: Operational roll-out through companies: 38 members Telco network operators: Deutsche Telekom, Eurofiber,
EATA European Automotive and Telecom Alliance EATA: a new Alliance Founded by six associations: Operational roll-out through companies: 38 members Telco network operators: Deutsche Telekom, Eurofiber,
World premiere at Hannover Messe: ZF s highly automated forklift can see, think and act
 Page 1/5, April 23, 2018 World premiere at Hannover Messe: ZF s highly automated forklift can see, think and act High-speed innovations: Technology company transfers expertise from other divisions to the
Page 1/5, April 23, 2018 World premiere at Hannover Messe: ZF s highly automated forklift can see, think and act High-speed innovations: Technology company transfers expertise from other divisions to the
Driver Assistance & Autonomous Driving
 Driver Assistance & Autonomous Driving Challenges and Opportunities Presented by Marc Seguer ADAS, Chasis Development SEAT, S.A. 30/03/2016 1 Driver Assistance & Autonomous Driving / Prepared by Marc Seguer
Driver Assistance & Autonomous Driving Challenges and Opportunities Presented by Marc Seguer ADAS, Chasis Development SEAT, S.A. 30/03/2016 1 Driver Assistance & Autonomous Driving / Prepared by Marc Seguer
An Introduction to Automated Vehicles
 An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY
 UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
V2X Outlook. Doug Patton. Society of Automotive Analysts Automotive Outlook Conference January 8, 2017
 V2X Outlook Doug Patton Executive Vice President Engineering Division DENSO International America, Inc. Society of Automotive Analysts Automotive Outlook Conference January 8, 2017 Societal Impact Federal
V2X Outlook Doug Patton Executive Vice President Engineering Division DENSO International America, Inc. Society of Automotive Analysts Automotive Outlook Conference January 8, 2017 Societal Impact Federal
Automated Driving development in France: 2015 update. Prof. Arnaud de La Fortelle MINES ParisTech Centre for Robotics
 Automated Driving development in France: 2015 update Prof. Arnaud de La Fortelle MINES ParisTech Centre for Robotics Past and future projects What has changed A few key labs were involved Inria, IFSTTAR,
Automated Driving development in France: 2015 update Prof. Arnaud de La Fortelle MINES ParisTech Centre for Robotics Past and future projects What has changed A few key labs were involved Inria, IFSTTAR,
Implementation for. Coordination. Electrification. Action on Ppp. Road-transport. October 26, October 26,
 Coordination Action on Ppp Implementation for Road-transport Electrification Gonzalo HENNEQUET (RENAULT) Coordinator of CAPIRE www.capire.eu The Coordination Action CAPIRE sustains and puts into practice
Coordination Action on Ppp Implementation for Road-transport Electrification Gonzalo HENNEQUET (RENAULT) Coordinator of CAPIRE www.capire.eu The Coordination Action CAPIRE sustains and puts into practice
Integrated ADAS HIL System with the Combination of CarMaker and Various ADAS Test Benches. Jinjong Lee, Konrad Yu-Mi Song, Hyundai-Autron
 Integrated ADAS HIL System with the Combination of CarMaker and Various ADAS Test Benches Jinjong Lee, Konrad Yu-Mi Song, Hyundai-Autron 1 Agenda Part1. ADAS Sensor Fusion HILS Trend 1.1 The trend of ADAS
Integrated ADAS HIL System with the Combination of CarMaker and Various ADAS Test Benches Jinjong Lee, Konrad Yu-Mi Song, Hyundai-Autron 1 Agenda Part1. ADAS Sensor Fusion HILS Trend 1.1 The trend of ADAS
Machine Learning & Active Safety Using Autonomous Driving and NVIDIA DRIVE PX. Dr. Jost Bernasch Virtual Vehicle Research Center Graz, Austria
 Machine Learning & Active Safety Using Autonomous Driving and NVIDIA DRIVE PX Dr. Jost Bernasch Virtual Vehicle Research Center Graz, Austria VIRTUAL VEHICLE Agenda 1 Open vehicle research platform 3 Austrian
Machine Learning & Active Safety Using Autonomous Driving and NVIDIA DRIVE PX Dr. Jost Bernasch Virtual Vehicle Research Center Graz, Austria VIRTUAL VEHICLE Agenda 1 Open vehicle research platform 3 Austrian
D1.3 FINAL REPORT (WORKPACKAGE SUMMARY REPORT)
") WP 1 D1.3 FINAL REPORT (WORKPACKAGE SUMMARY REPORT) Project Acronym: Smart RRS Project Full Title: Innovative Concepts for smart road restraint systems to provide greater safety for vulnerable road users.
WP 1 D1.3 FINAL REPORT (WORKPACKAGE SUMMARY REPORT) Project Acronym: Smart RRS Project Full Title: Innovative Concepts for smart road restraint systems to provide greater safety for vulnerable road users.
Our Market and Sales Outlook
 Our Market and Sales Outlook Art Blanchford Executive Vice President Sales and Product Planning 1 Leading Market Position in Large and Rapid Growing Market Addressable Market including potential opportunity
Our Market and Sales Outlook Art Blanchford Executive Vice President Sales and Product Planning 1 Leading Market Position in Large and Rapid Growing Market Addressable Market including potential opportunity
Towards Realizing Autonomous Driving Based on Distributed Decision Making for Complex Urban Environments
 Towards Realizing Autonomous Driving Based on Distributed Decision Making for Complex Urban Environments M.Sc. Elif Eryilmaz on behalf of Prof. Dr. Dr. h.c. Sahin Albayrak Digital Mobility Our vision Intelligent
Towards Realizing Autonomous Driving Based on Distributed Decision Making for Complex Urban Environments M.Sc. Elif Eryilmaz on behalf of Prof. Dr. Dr. h.c. Sahin Albayrak Digital Mobility Our vision Intelligent