Machine Learning & Active Safety Using Autonomous Driving and NVIDIA DRIVE PX. Dr. Jost Bernasch Virtual Vehicle Research Center Graz, Austria
|
|
|
- Griffin Butler
- 6 years ago
- Views:
Transcription


1 Machine Learning & Active Safety Using Autonomous Driving and NVIDIA DRIVE PX Dr. Jost Bernasch Virtual Vehicle Research Center Graz, Austria VIRTUAL VEHICLE









2 Agenda 1 Open vehicle research platform 3 Austrian Test & Validation Region 2 Machine Learning & Active Safety 4 Fully digital tool chain May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 2




3 Open vehicle platform Automated Driving Demonstrator May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 3








4 Open vehicle platform: Roadmap NVIDIA DRIVE PX 2 HW-Platform Nvidia, Infineon Aurix, dspace, Data logging & measurement equipment, selfdiagnostics Deep learning Scene interpretation, Advanced HMI augmented reality, Electrified vehicle with internal access; steer, brake, drive by wire, dual energy storage Demonstrator Vehicle ADAS Sensor Integration Radar, Camera, GPS, IMU, Ultrasonic, Lidar, Interior- Camera, C2X, Battery-monitoring Sensor-Fusion ADAS Functions Implementation Advanced control (LKA, ACC, LCA, Motorway Assistant, EBA), Online Driver Monitoring, Collision detection, Traffic-Light- Assistant, Infrastructure interaction, sensor selfdiagnostics Optimization and Validation HW-SW co-simulation, Distributed vehicle- Testing, Testdrives, Function optimization Vehicle in the loop tests May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 4

 1 x Mobileye 630 (Full")
 2 x ScaLa LIDAR sensor* 4")

5 Open vehicle platform: Components 4 x Sekonix SF3323 Automotive Camera (100 aperture angle for 360 surround vision) 2 x Sekonix SF3322 Automotive Camera (60 aperture angle for long range vision) 1 x Mobileye 630 (Full Extended Log Data) 1 x Infineon ToF Camera prototype* (evaluation for park assistance) 2 x ScaLa LIDAR sensor* 4 x Continental Short Range Radar SRR208 2 x Continental Long Range Radar ARS 408 *planned in Future May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 5
6 Open vehicle platform: Data Rate SONAR ~ KB PER SECOND RADAR ~ KB PER SECOND GPRS ~50 KB PER SECOND CAMERAS ~20-40 MB PER SECOND AUTONOMOUS VEHICLES GB PER DAY LIDAR ~10-70 MB PER SECOND Source: Intel May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 6
7 Machine Learning & Active Safety May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 7






8 Separation driving task Vehicle Driver Motivation. Active Safety vs. Automated Driving HAF technologies offers the possibility to optimize active safety systems in lower automation levels! No intervening vehicle system active. Vehicle assisted longitudinal and lateral control. Vehicle assisted longitudinal and lateral control (for a period of time and/or in specific use case). System has longitudinal and lateral control in a specific use case. Recognizes its performance limits and requests driver to resume control with sufficient time margin. System can cope with all situations automatically during the entire journey. Driver doesn t monitor the system. Driver only Assisted Partially automated Automation level / Technological effort Highly automated Fully automated Dr. Jost Bernasch VIRTUAL VEHICLE 8

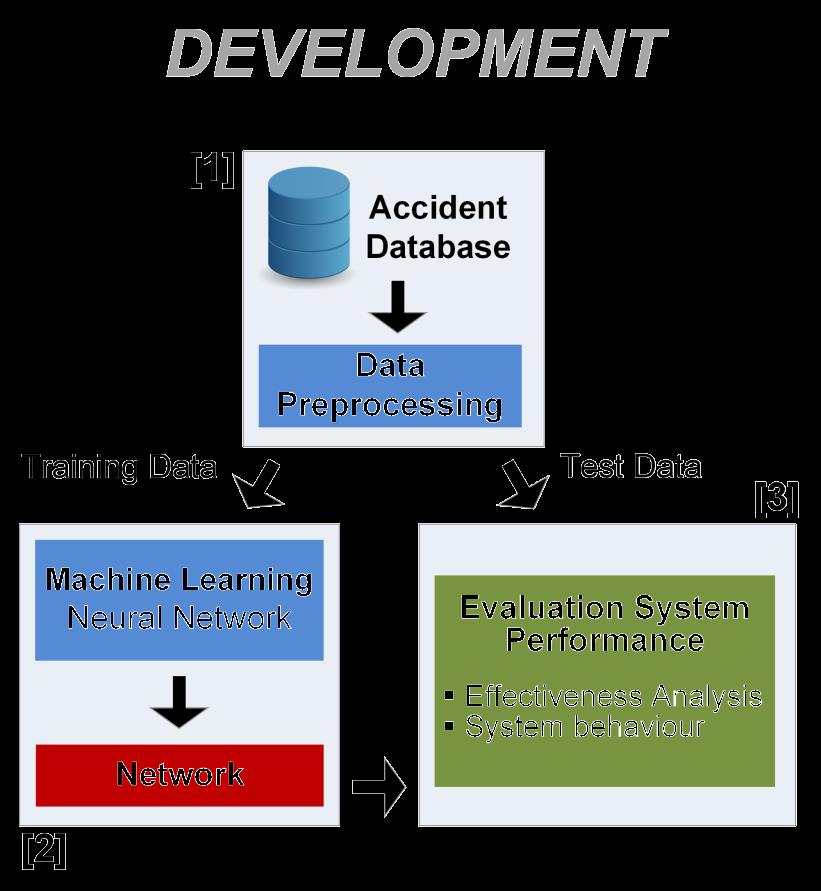
9 Problem: Complexity and high variation of accidents Thinking of safety functions for every combination of accident type and cause Type: Cause: speeding, slippery road, etc First 50%: 26 types and causes of accidents Last 50%: 5287 types and causes of accidents Function design based an quantitative (e.g. DESTATIS) and qualitative accident databases (e.g. GIDAS Pre-Crash-Matrix) Exponentially growing effort tiny increase in accident coverage How to cover wide range of variations? May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 9





10 Highly Automated Driving (Level 3) Technologies. Required Technologies for Highly Automated Driving: Redundant 360 environment recognition High-precision digital maps incl. localization Driver monitoring Automated driving until the high dynamic limits Backend communication Backend As A Sensor [WF14] Here Kostal BMW Dr. Jost Bernasch VIRTUAL VEHICLE 10

 Generated pedestrian scenarios from the")

11 Vision. Optimization based on real world traffic data. 360 sensors High-precision maps Driver monitoring Backend Our use case: Crossing pedestrian (75% of all pedestrian accidents) Generated pedestrian scenarios from the Effectiveness analysis Crossing scenarios Total scenarios Accidents Training data Test data May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 11



12 Machine Learning. What are we going to learn? Point of No Return Learning of the brake time based on the accident data, when the emergency brake assistance needs to brake. The brake time is a result of the system limitations of the Active Safety System. The uncertainties of the pedestrian and the driver behavior will be considered by the variation of the accident data. FEATURES 1. Velocity Vehicle* 2. Acceleration Vehicle* 3. x/y-position Pedestrian* 4. Rel. velocity x/y-direction Pedestrian* 5. Brake pedal position 6. Angle Vehicle Pedestrian* 7. Distance Vehicle Pedestrian* 8. Velocity Pedestrian* 9. Orientation Pedestrian* 10. Time-To-Collision* 11. Predicted pedestrian position at TTC=0* t =? Simplified labeling datasets: a = 10; % Acceleration vehicle [m/s²] td = 0.2; % Delay brake [s] ts = 0.2; % Delay max. brake pressure [s] SAFETY_GAP_SIDE = 0.7; [m] ttb = (ego.v - a/2*ts)/a + ts + td; if ( ttb > ttc) && abs(object.y_pred) < ego.width/2 ) avoidable_aeb = 0; else avoidable_aeb = 1; Dr. Jost Bernasch VIRTUAL VEHICLE 12

13 Example VRU Safety May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 13


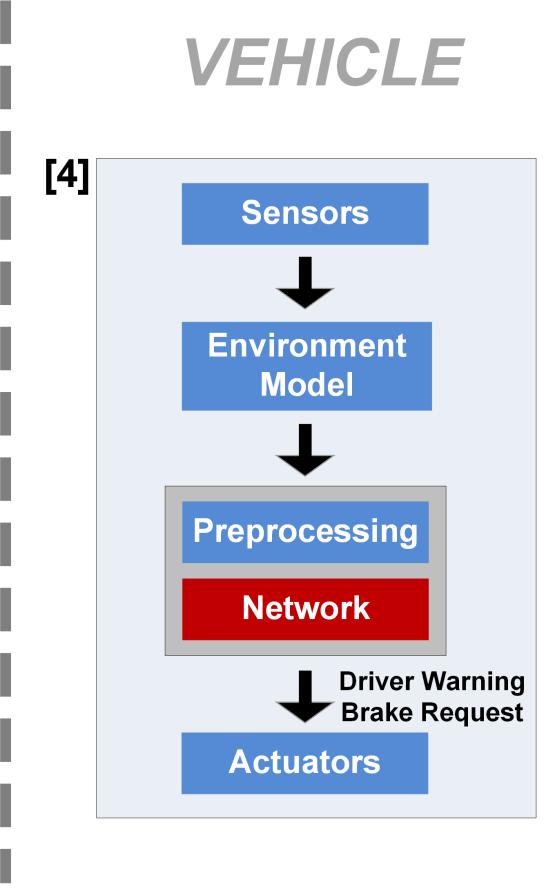

14 Concept. Function Development Active Safety System. Dr. Jost Bernasch VIRTUAL VEHICLE 14
15 Simulation Results. False positives vs. speed reduction Variation by the algorithm evaluation: 1) Feature set (feature variation) 2) Training data (reduced speed range pedestrian) Random Forest Neural Network Speed reduction [%] Reference algorithm 20 RF RF (Extended Features) 10 RF (Reduced Training Data) RF (Extended Features / Reduced Training Data) False positives Speed reduction [%] Reference algorithm 20 NN NN (Extended Features) 10 NN (Reduced Training Data) NN (Extended Features / Reduced Training Data) False positives May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 15
16 Simulation Results. Distribution speed reduction 250 Speed reduction Reference Implementation 73.7% Random Forest 83.4% Neural Network 92.0% Operating point algorithms: equal amount of false positives (10) [#] Avoided. [#] No System Reference algorithm RF RF (Extended Features) RF (Reduced Training Data) RF (Extended Features / Reduced Training Data) NN NN (Extended Features) NN (Reduced Training Data) NN (Extended Features / Reduced Training Data) Collision speed [km/h] May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 16
17 Summary. Active Safety uses Machine Learning Limitations in our consideration: Theoretical analysis of the method, without the consideration of legal aspects. Proof-of-concept. Series application only based on real world data. Results: Machine Learning offers the potential to improve Active Safety Systems. But the verification of the system raises new challenges. Required system behavior is reachable, technical design for defined effectiveness or FP/FN is possible. Neural Networks handle the missing excluded speed range of the pedestrian and a standard feature set without a performance drop compared to the Random Forest. Challenges: Required real world data: amount, quality and more complex scenarios. Verification of the system behavior May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 17

18 Agenda Fully digital tool chain Initiative: Open Connected Testbed May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 18
 May 2017 Dr.")
19 Real-Time Co-Simulation System Simulation / RT capability - Combine simulation models from very different tools - Seamlessly from MiL from SiL to HiL Key technology Energy preserving algorithms for stability (patented) May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 19


")



 ADAS")


20 VIR-REAL Environment Real Environment Real Sensor Actuator (Vehicle) Sensor Aktuator Models Virtual Dev. Env. Computing Platforms (NVIDIA, Aurix) ADAS Function (Control, Data Fusion) HiL MiL/SiL Virtual Environment May 2017 Dr. Jost Bernasch 20


21 Agenda ALP.Lab Austrian Light Vehicle Proving Region for Automated Driving May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 21




")
")
 City of Graz public roads, Graz/")
22 Public Private ALP.Lab: testing possibilities in preparation planned planned planned Magna & AVL proving grounds, Graz/ Styria Eisenerz/ Styria (tunnel) Lungau proving grounds, Salzburg (tunnel, toll station, snow) The Red Bull Ring, Formula 1 Spielberg/ Styria in preparation planned planned planned Motorway A2, Graz-Ost Laßnitzhöhe Mooskirchen Graz-Ost (planned) Motorway A9, A2 St. Michael Graz-Ost (tunnel, toll station) Motorway S6, S36, A9 Leoben SLO (border crossing) City of Graz public roads, Graz/ Styria with more testing grounds that will follow May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 22

: HiL: ViL (Driving Cube): Proving")
 Sensor validation and")


23 ALP.Lab Full digitally integrated test chain Model-in-the-Loop Software-in-Loop Hardware-in-the- Loop Driving Cube Powertrain Test Bed Proving Ground Test Public Road Test (Test Field) MiL / SiL (Simulation): HiL: ViL (Driving Cube): Proving Ground: Public Road Testing: Testing of ADAS/ADV software functions Driving simulator (test of human interactions) Sensor validation and qualification ADAS/ADV vehicle qualification prior road test Reproducible test of dangerous scenarios Test in regional-specific real-world scenarios The 5 testing stages are embedded in a system of comprehensive tools and models, for data management, processing and reporting May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 23


24 ALP.Lab at a glance May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 24


25 ALP.Lab Examples of point cloud and image data A9 from Graz A2 to Vienna Dr. Jost Bernasch Graz West A9/ A2 Dense 3D LiDAR point cloud Color represent Elevation May 2017 VIRTUAL VEHICLE 25


26 ALP.Lab Examples of point cloud and image data Graz Webling Dense 3D LiDAR point cloud Color from UltraCam Panoramic Image Data Dr. Jost Bernasch May 2017 VIRTUAL VEHICLE 26


27 ALP.Lab Examples of point cloud and image data A2 between Graz West and Graz Airport Dense LiDAR Point Cloud and Image Data Color Code of the Point Cloud: Elevation May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 27
28 SUMMARY Proof of Concept: Machine Learning can improve active saftey systems Flexible Research Platform for Autonomous Driving is available Austrian Test & Proving Ground including a full digitally integrated test chain is build starting in June 2017 Combined virtual & real simulation environment prepares future virtual homologation of complex systems. May 2017 Dr. Jost Bernasch VIRTUAL VEHICLE 28
29 Thank you Dr. Jost Bernasch Virtual Vehicle Research Center Graz, Austria VIRTUAL VEHICLE
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017
 IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017 AUTOMATED DRIVING OPENS NEW OPPORTUNITIES FOR CUSTOMERS AND COMMUNITY. MORE SAFETY MORE COMFORT MORE FLEXIBILITY MORE
IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017 AUTOMATED DRIVING OPENS NEW OPPORTUNITIES FOR CUSTOMERS AND COMMUNITY. MORE SAFETY MORE COMFORT MORE FLEXIBILITY MORE
Automated Driving. Definition for Levels of Automation OICA,
 Informal document No. WP.29-162-20 162 th WP.29 session, 11-14 March 2014 agenda item 20. Automated Driving Definition for Levels of Automation OICA, 2014-03-14 Motivation New automated driving and parking
Informal document No. WP.29-162-20 162 th WP.29 session, 11-14 March 2014 agenda item 20. Automated Driving Definition for Levels of Automation OICA, 2014-03-14 Motivation New automated driving and parking
On the role of AI in autonomous driving: prospects and challenges
 On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
Items to specify: 4. Motor Speed Control. Head Unit. Radar. Steering Wheel Angle. ego vehicle speed control
 Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
Deep Learning Will Make Truly Self-Driving Cars a Reality
 Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Highly Automated Driving: Fiction or Future?
 The future of driving. Final Event Highly Automated Driving: Fiction or Future? Prof. Dr. Jürgen Leohold Volkswagen Group Research Motivation The driver as the unpredictable factor: Human error is the
The future of driving. Final Event Highly Automated Driving: Fiction or Future? Prof. Dr. Jürgen Leohold Volkswagen Group Research Motivation The driver as the unpredictable factor: Human error is the
The Imperative to Deploy. Automated Driving. CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper
 Stepper") The Imperative to Deploy 1 Automated Driving CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper 2 Paths to the Car of the Future costs roaming e-bike driving enjoyment hybrid electric
The Imperative to Deploy 1 Automated Driving CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper 2 Paths to the Car of the Future costs roaming e-bike driving enjoyment hybrid electric
WHITE PAPER Autonomous Driving A Bird s Eye View
 WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
Automated Driving is the declared goal of the automotive industry. Systems evolve from complicated to complex
 Automated Driving is the declared goal of the automotive industry Systems evolve from complicated to complex Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity
Automated Driving is the declared goal of the automotive industry Systems evolve from complicated to complex Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity
Test & Validation Challenges Facing ADAS and CAV
 Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
OPENSTEERING PLATFORM
 MDYNAMIX AFFILIATED INSTITUTE OF MUNICH UNIVERSITY OF APPLIED SCIENCES OPENSTEERING PLATFORM FOR DEVELOPMENT OF ADVANCED STEERING FUNCTIONS, ADAS AND AUTONOMOUS VEHICLES 9th International Munich Chassis
MDYNAMIX AFFILIATED INSTITUTE OF MUNICH UNIVERSITY OF APPLIED SCIENCES OPENSTEERING PLATFORM FOR DEVELOPMENT OF ADVANCED STEERING FUNCTIONS, ADAS AND AUTONOMOUS VEHICLES 9th International Munich Chassis
Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions
 Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions GTC Europe 2017 Dominik Dörr 2 Motivation Virtual Prototypes Virtual Sensor Models CarMaker and NVIDIA DRIVE PX
Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions GTC Europe 2017 Dominik Dörr 2 Motivation Virtual Prototypes Virtual Sensor Models CarMaker and NVIDIA DRIVE PX
State of the art ISA, LKAS & AEB. Yoni Epstein ADAS Program Manager Advanced Development
 State of the art ISA, LKAS & AEB Yoni Epstein ADAS Program Manager Advanced Development Mobileye, an Intel Company: The world leader in Advanced Driver Assistance Systems (ADAS) In 1999, Prof. Amnon Shashua
State of the art ISA, LKAS & AEB Yoni Epstein ADAS Program Manager Advanced Development Mobileye, an Intel Company: The world leader in Advanced Driver Assistance Systems (ADAS) In 1999, Prof. Amnon Shashua
Virtual Testing of the Full Vehicle System
 Virtual Testing of the Full Vehicle System Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
Virtual Testing of the Full Vehicle System Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
Leveraging AI for Self-Driving Cars at GM. Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel
 Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE. Alex Haag Munich,
 REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE Alex Haag Munich, 10.10.2017 10/9/17 Regulatory Approval of an AI-based Autonomous Vehicle 2 1 INTRO Autonomous Intelligent Driving, GmbH Launched
REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE Alex Haag Munich, 10.10.2017 10/9/17 Regulatory Approval of an AI-based Autonomous Vehicle 2 1 INTRO Autonomous Intelligent Driving, GmbH Launched
Autonomous Vehicles Transforming Vehicle Development André Rolfsmeier dspace Technology Conference 2017
 Autonomous Vehicles Transforming Vehicle Development André Rolfsmeier dspace Technology Conference 2017 dspace GmbH Rathenaustr. 26 33102 Paderborn Germany 2 Main visions in the automobile industry What
Autonomous Vehicles Transforming Vehicle Development André Rolfsmeier dspace Technology Conference 2017 dspace GmbH Rathenaustr. 26 33102 Paderborn Germany 2 Main visions in the automobile industry What
ZF Advances Key Technologies for Automated Driving
 Page 1/5, January 9, 2017 ZF Advances Key Technologies for Automated Driving ZF s See Think Act supports self-driving cars and trucks ZF and NVIDIA provide computing power to bring artificial intelligence
Page 1/5, January 9, 2017 ZF Advances Key Technologies for Automated Driving ZF s See Think Act supports self-driving cars and trucks ZF and NVIDIA provide computing power to bring artificial intelligence
END TO END NEEDS FOR AUTONOMOUS VEHICLES NORM MARKS SEPT. 6, 2018
 END TO END NEEDS FOR AUTONOMOUS VEHICLES NORM MARKS SEPT. 6, 2018 THE MOST EXCITING TIME IN TECH HISTORY GAMING $100B Industry ARTIFICIAL INTELLIGENCE $3T IT Industry AUTONOMOUS VEHICLES $10T Transportation
END TO END NEEDS FOR AUTONOMOUS VEHICLES NORM MARKS SEPT. 6, 2018 THE MOST EXCITING TIME IN TECH HISTORY GAMING $100B Industry ARTIFICIAL INTELLIGENCE $3T IT Industry AUTONOMOUS VEHICLES $10T Transportation
China Intelligent Connected Vehicle Technology Roadmap 1
 China Intelligent Connected Vehicle Technology Roadmap 1 Source: 1. China Automotive Engineering Institute, , Oct. 2016 1 Technology Roadmap 1 General
China Intelligent Connected Vehicle Technology Roadmap 1 Source: 1. China Automotive Engineering Institute, , Oct. 2016 1 Technology Roadmap 1 General
2015 The MathWorks, Inc. 1
 2015 The MathWorks, Inc. 1 [Subtrack 2] Vehicle Dynamics Blockset 소개 김종헌부장 2015 The MathWorks, Inc. 2 Agenda What is Vehicle Dynamics Blockset? How can I use it? 3 Agenda What is Vehicle Dynamics Blockset?
2015 The MathWorks, Inc. 1 [Subtrack 2] Vehicle Dynamics Blockset 소개 김종헌부장 2015 The MathWorks, Inc. 2 Agenda What is Vehicle Dynamics Blockset? How can I use it? 3 Agenda What is Vehicle Dynamics Blockset?
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY
 UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
VIRTUAL VEHICLE Research Center
 VIRTUAL VEHICLE Research Center Automotive Rail Aerospace HARD FACTS SHAREHOLDERS Founded: July 2002 Staff: Turnover: Location: > 200 employees EUR 22 million Graz, Austria Interdisciplinary Research Topics
VIRTUAL VEHICLE Research Center Automotive Rail Aerospace HARD FACTS SHAREHOLDERS Founded: July 2002 Staff: Turnover: Location: > 200 employees EUR 22 million Graz, Austria Interdisciplinary Research Topics
Automated Driving: Design and Verify Perception Systems
 Automated Driving: Design and Verify Perception Systems Giuseppe Ridinò 2015 The MathWorks, Inc. 1 Some common questions from automated driving engineers 1011010101010100101001 0101010100100001010101 0010101001010100101010
Automated Driving: Design and Verify Perception Systems Giuseppe Ridinò 2015 The MathWorks, Inc. 1 Some common questions from automated driving engineers 1011010101010100101001 0101010100100001010101 0010101001010100101010
EPSRC-JLR Workshop 9th December 2014 TOWARDS AUTONOMY SMART AND CONNECTED CONTROL
 EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
ACTIVE SAFETY 3.0. Prof. Kompaß, VP Fahrzeugsicherheit, 14. April 2016
 ACTIVE SAFETY 3.0 Prof. Kompaß, VP Fahrzeugsicherheit, 14. April 2016 THE NEW BMW 7 SERIES DRIVER ASSISTANCE PROVIDES COMFORT AND SAFETY AT THE HIGHEST LEVEL. Crossing traffic warning rear / front Lane
ACTIVE SAFETY 3.0 Prof. Kompaß, VP Fahrzeugsicherheit, 14. April 2016 THE NEW BMW 7 SERIES DRIVER ASSISTANCE PROVIDES COMFORT AND SAFETY AT THE HIGHEST LEVEL. Crossing traffic warning rear / front Lane
AEB IWG 02. ISO Standard: FVCMS. I received the following explanation from the FVCMS author:
 ISO Standard: FVCMS I received the following explanation from the FVCMS author: The intent behind SRB was to potentially draw the driver s attention to hazards ahead of the SV before MB was enacted but
ISO Standard: FVCMS I received the following explanation from the FVCMS author: The intent behind SRB was to potentially draw the driver s attention to hazards ahead of the SV before MB was enacted but
PSA Peugeot Citroën Driving Automation and Connectivity
 PSA Peugeot Citroën Driving Automation and Connectivity June 2015 Automation Driver Levels of Automated Driving Driver continuously performs the longitudinal and lateral dynamic driving task Driver continuously
PSA Peugeot Citroën Driving Automation and Connectivity June 2015 Automation Driver Levels of Automated Driving Driver continuously performs the longitudinal and lateral dynamic driving task Driver continuously
The connected vehicle is the better vehicle!
 AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
AI Driven Environment Modeling for Autonomous Driving on NVIDIA DRIVE PX2
 AI Driven Environment Modeling for Autonomous Driving on NVIDIA DRIVE PX2 Dr. Alexey Abramov, Christopher Bayer, Dr. Claudio Heller, Claudia Loy Chassis & Safety Agenda 1 2 3 4 5 6 7 Introduction Autonomous
AI Driven Environment Modeling for Autonomous Driving on NVIDIA DRIVE PX2 Dr. Alexey Abramov, Christopher Bayer, Dr. Claudio Heller, Claudia Loy Chassis & Safety Agenda 1 2 3 4 5 6 7 Introduction Autonomous
Testing of Emissions- Relevant Driving Cycles on an Engine Testbed
 Testing of Emissions- Relevant Driving Cycles on an Engine Testbed Dr. Klaus Rothbart RDE as a Challenge for the Development TRAFFIC EXTREME CONDITIONS MOUNTAIN RANDOMNESS Driving style has a strong impact
Testing of Emissions- Relevant Driving Cycles on an Engine Testbed Dr. Klaus Rothbart RDE as a Challenge for the Development TRAFFIC EXTREME CONDITIONS MOUNTAIN RANDOMNESS Driving style has a strong impact
Driver Assistance & Autonomous Driving
 Driver Assistance & Autonomous Driving Challenges and Opportunities Presented by Marc Seguer ADAS, Chasis Development SEAT, S.A. 30/03/2016 1 Driver Assistance & Autonomous Driving / Prepared by Marc Seguer
Driver Assistance & Autonomous Driving Challenges and Opportunities Presented by Marc Seguer ADAS, Chasis Development SEAT, S.A. 30/03/2016 1 Driver Assistance & Autonomous Driving / Prepared by Marc Seguer
THE WAY TO HIGHLY AUTOMATED DRIVING.
 December 15th, 2014. THE WAY TO HIGHLY AUTOMATED DRIVING. DR. WERNER HUBER, HEAD OF DRIVER ASSISTANCE AND PERCEPTION AT BMW GROUP RESEARCH AND TECHNOLOGY. AUTOMATION IS AN ESSENTIAL FEATURE OF THE INTELLIGENT
December 15th, 2014. THE WAY TO HIGHLY AUTOMATED DRIVING. DR. WERNER HUBER, HEAD OF DRIVER ASSISTANCE AND PERCEPTION AT BMW GROUP RESEARCH AND TECHNOLOGY. AUTOMATION IS AN ESSENTIAL FEATURE OF THE INTELLIGENT
Citi's 2016 Car of the Future Symposium
 Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS
 MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
VIRTUAL HYBRID ON THE ENGINE TEST BENCH SMART FRONTLOADING
 VIRTUAL HYBRID ON THE ENGINE TEST BENCH SMART FRONTLOADING RDE ENGINEERING [EIL] J. GERSTENBERG, DR. S. STERZING-OPPEL, C. FISCHER, B. SEIDEL, D. TRENKLE, M. OFF, DR. M. GLORA Overview RDE tool chain Virtual
VIRTUAL HYBRID ON THE ENGINE TEST BENCH SMART FRONTLOADING RDE ENGINEERING [EIL] J. GERSTENBERG, DR. S. STERZING-OPPEL, C. FISCHER, B. SEIDEL, D. TRENKLE, M. OFF, DR. M. GLORA Overview RDE tool chain Virtual
LiDAR Teach-In OSRAM Licht AG June 20, 2018 Munich Light is OSRAM
 www.osram.com LiDAR Teach-In June 20, 2018 Munich Light is OSRAM Agenda Introduction Autonomous driving LIDAR technology deep-dive LiDAR@OS: Emitter technologies Outlook LiDAR Tech Teach-In June 20, 2018
www.osram.com LiDAR Teach-In June 20, 2018 Munich Light is OSRAM Agenda Introduction Autonomous driving LIDAR technology deep-dive LiDAR@OS: Emitter technologies Outlook LiDAR Tech Teach-In June 20, 2018
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS
 EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
FUNCTIONAL SAFETY FOR AUTONOMOUS DRIVING
 FUNCTIONAL SAFETY FOR AUTONOMOUS DRIVING Dr. Justyna Zander, NVIDIA January 30, 2017 IS&T Int. Symposium on Electronic Imaging 2017; Autonomous Vehicles and Machines 2017; 29 January - 2 February, 2017
FUNCTIONAL SAFETY FOR AUTONOMOUS DRIVING Dr. Justyna Zander, NVIDIA January 30, 2017 IS&T Int. Symposium on Electronic Imaging 2017; Autonomous Vehicles and Machines 2017; 29 January - 2 February, 2017
VALIDATION OF ASSISTED AND AUTOMATED DRIVING SYSTEMS
 VALIDATION OF ASSISTED AND AUTOMATED DRIVING SYSTEMS Udo Steininger TÜV SÜD, Hans-Peter Schöner Daimler, Mark Schiementz BMW, Jens Mazzega DLR crash.tech, April 19-20 2016, Munich Key note In 1901 Daimler
VALIDATION OF ASSISTED AND AUTOMATED DRIVING SYSTEMS Udo Steininger TÜV SÜD, Hans-Peter Schöner Daimler, Mark Schiementz BMW, Jens Mazzega DLR crash.tech, April 19-20 2016, Munich Key note In 1901 Daimler
THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA.
 GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
The Digital Future of Driving Dr. László Palkovics State Secretary for Education
 The Digital Future of Driving Dr. László Palkovics State Secretary for Education 1. WHAT IS THE CHALLENGE? What is the challenge? Mobility Challenges Inspirating factors for development 1 Zero Emission
The Digital Future of Driving Dr. László Palkovics State Secretary for Education 1. WHAT IS THE CHALLENGE? What is the challenge? Mobility Challenges Inspirating factors for development 1 Zero Emission
Automotive Electronics/Connectivity/IoT/Smart City Track
 Automotive Electronics/Connectivity/IoT/Smart City Track The Automobile Electronics Sessions explore and investigate the ever-growing world of automobile electronics that affect virtually every aspect
Automotive Electronics/Connectivity/IoT/Smart City Track The Automobile Electronics Sessions explore and investigate the ever-growing world of automobile electronics that affect virtually every aspect
THE HIGHWAY-CHAUFFEUR
 Motivation: - Highway-Chauffeur as an example for a conditional automated driving function (SAE level 3) - Standard scenarios, critical scenarios and automation-risks are the basis to fill the scenariodatabase
Motivation: - Highway-Chauffeur as an example for a conditional automated driving function (SAE level 3) - Standard scenarios, critical scenarios and automation-risks are the basis to fill the scenariodatabase
Full Vehicle Simulation for Electrification and Automated Driving Applications
 Full Vehicle Simulation for Electrification and Automated Driving Applications Vijayalayan R & Prasanna Deshpande Control Design Application Engineering 2015 The MathWorks, Inc. 1 Key Trends in Automotive
Full Vehicle Simulation for Electrification and Automated Driving Applications Vijayalayan R & Prasanna Deshpande Control Design Application Engineering 2015 The MathWorks, Inc. 1 Key Trends in Automotive
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm)
") Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) ADAS and Automated Driving Functionality Blessing and Curse Alfred Eckert, Head
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) ADAS and Automated Driving Functionality Blessing and Curse Alfred Eckert, Head
MEMS Sensors for automotive safety. Marc OSAJDA, NXP Semiconductors
 MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
Autonomous Driving. AT VOLVO CARS Jonas Ekmark Manager Innovations, Volvo Car Group
 Autonomous Driving AT VOLVO CARS Jonas Ekmark Manager Innovations, Volvo Car Group Global megatrends Continued urbanisation Growing number of megacities Air quality major health issue Traffic accidents
Autonomous Driving AT VOLVO CARS Jonas Ekmark Manager Innovations, Volvo Car Group Global megatrends Continued urbanisation Growing number of megacities Air quality major health issue Traffic accidents
AVL Virtual Testbed. Calibrate beyond the limits
 AVL Virtual Testbed Calibrate beyond the limits THE CHALLENGE Calibration Complexity The increasing vehicle diversity, combined with a multi tude of worldwide emissions regulations, the future introduction
AVL Virtual Testbed Calibrate beyond the limits THE CHALLENGE Calibration Complexity The increasing vehicle diversity, combined with a multi tude of worldwide emissions regulations, the future introduction
MoBEO: Model based Engine Development and Calibration
 MoBEO: Model based Engine Development and Calibration Innovative ways to increase calibration quality within the limits of acceptable development effort! Dr. Prakash Gnanam, AVL Powertrain UK Ltd 1 25
MoBEO: Model based Engine Development and Calibration Innovative ways to increase calibration quality within the limits of acceptable development effort! Dr. Prakash Gnanam, AVL Powertrain UK Ltd 1 25
AUTOMATED DRIVING IN EUROPE
 AUTOMATED DRIVING IN EUROPE SIP-ADUS WORKSHOP TOKYO 14.11.2017 DR. HELGE NEUNER HISTORY OF AUTOMATED DRIVING @ VOLKSWAGEN GROUP RESEARCH Stanley Junior PAUL (2005) (2007) (2007) icar HAVEit et Follow me!
AUTOMATED DRIVING IN EUROPE SIP-ADUS WORKSHOP TOKYO 14.11.2017 DR. HELGE NEUNER HISTORY OF AUTOMATED DRIVING @ VOLKSWAGEN GROUP RESEARCH Stanley Junior PAUL (2005) (2007) (2007) icar HAVEit et Follow me!
Automated Testing in Automotive Software Development using Vehicle System Simulation
 Automated Testing in Automotive Software Development using Vehicle System Simulation Oliver Philipp, Martin Ehmann TESIS DYNAware GmbH, www.tesis-dynaware.com 1 Defect Rate Cost for Defect Fix Motivation:
Automated Testing in Automotive Software Development using Vehicle System Simulation Oliver Philipp, Martin Ehmann TESIS DYNAware GmbH, www.tesis-dynaware.com 1 Defect Rate Cost for Defect Fix Motivation:
Can STPA contribute to identify hazards of different natures and improve safety of automated vehicles?
 Can STPA contribute to identify hazards of different natures and improve safety of automated vehicles? Stephanie Alvarez, Franck Guarnieri & Yves Page (MINES ParisTech, PSL Research University and RENAULT
Can STPA contribute to identify hazards of different natures and improve safety of automated vehicles? Stephanie Alvarez, Franck Guarnieri & Yves Page (MINES ParisTech, PSL Research University and RENAULT
DYNA4 Open Simulation Framework with Flexible Support for Your Work Processes and Modular Simulation Model Library
 Open Simulation Framework with Flexible Support for Your Work Processes and Modular Simulation Model Library DYNA4 Concept DYNA4 is an open and modular simulation framework for efficient working with simulation
Open Simulation Framework with Flexible Support for Your Work Processes and Modular Simulation Model Library DYNA4 Concept DYNA4 is an open and modular simulation framework for efficient working with simulation
DA to AD systems L3+: An evolutionary approach incorporating disruptive technologies
 DA to AD systems L3+: An evolutionary approach incorporating disruptive technologies Dr. Dieter Hötzer Vice President Business Unit Automated Driving Chassis Systems Control Robert Bosch GmbH Traffic jam
DA to AD systems L3+: An evolutionary approach incorporating disruptive technologies Dr. Dieter Hötzer Vice President Business Unit Automated Driving Chassis Systems Control Robert Bosch GmbH Traffic jam
AUTOMATED DRIVING AND INFRASTRUCTURE DREAMTEAM OR ALIEN TO EACH OTHER?
 Bild einfügen, via Folienmaster Ansicht Folienmaster, das Bild in den Hintergrund geben, damit das Logo ganz oben ist! Bei Motiv darauf achten, dass das Logo gut erkennbar ist (passendes Logo wählen positives
Bild einfügen, via Folienmaster Ansicht Folienmaster, das Bild in den Hintergrund geben, damit das Logo ganz oben ist! Bei Motiv darauf achten, dass das Logo gut erkennbar ist (passendes Logo wählen positives
Driver assistance systems and outlook into automated driving
 Driver assistance systems and outlook into automated driving EAEC-ESFA2015 Bucharest November 2015 1 General presentation of the Bosch Group Some 45,600 1 researchers and developers work at Bosch: at 94
Driver assistance systems and outlook into automated driving EAEC-ESFA2015 Bucharest November 2015 1 General presentation of the Bosch Group Some 45,600 1 researchers and developers work at Bosch: at 94
Dr. Chris Borroni-Bird, VP, Strategic Development, Qualcomm Technologies Incorporated. Enabling Connected and Electric Vehicles
 Dr. Chris Borroni-Bird, VP, Strategic Development, Qualcomm Technologies Incorporated Enabling Connected and Electric Vehicles 1 2 3 4 Introduction DSRC WEVC Summary Agenda 2 Multiple technologies intersect
Dr. Chris Borroni-Bird, VP, Strategic Development, Qualcomm Technologies Incorporated Enabling Connected and Electric Vehicles 1 2 3 4 Introduction DSRC WEVC Summary Agenda 2 Multiple technologies intersect
On the road to automated vehicles Sensors pave the way!
 On the road to automated vehicles Sensors pave the way! 26B connected devices 250M connected vehicles by 2020 Ottomatika http://www.cmu.edu/news/stories/archives/2015/august/spinoff-acquired.html
On the road to automated vehicles Sensors pave the way! 26B connected devices 250M connected vehicles by 2020 Ottomatika http://www.cmu.edu/news/stories/archives/2015/august/spinoff-acquired.html
Vehicle Dynamics Models for Driving Simulators
 Vehicle Dynamics Models for Driving Simulators Thomas D. Gillespie, Director of Product Planning Mechanical Simulation Corporation Agenda Introduction to Mechanical Simulation Vehicle dynamics simulation
Vehicle Dynamics Models for Driving Simulators Thomas D. Gillespie, Director of Product Planning Mechanical Simulation Corporation Agenda Introduction to Mechanical Simulation Vehicle dynamics simulation
Integrated ADAS HIL System with the Combination of CarMaker and Various ADAS Test Benches. Jinjong Lee, Konrad Yu-Mi Song, Hyundai-Autron
 Integrated ADAS HIL System with the Combination of CarMaker and Various ADAS Test Benches Jinjong Lee, Konrad Yu-Mi Song, Hyundai-Autron 1 Agenda Part1. ADAS Sensor Fusion HILS Trend 1.1 The trend of ADAS
Integrated ADAS HIL System with the Combination of CarMaker and Various ADAS Test Benches Jinjong Lee, Konrad Yu-Mi Song, Hyundai-Autron 1 Agenda Part1. ADAS Sensor Fusion HILS Trend 1.1 The trend of ADAS
Advanced Vehicle Control System Development Div.
 Autonomous Driving Technologies for Advanced Driver Assist System Toyota Motor Corporation Advanced Vehicle Control System Development Div. Hiroyuki KANEMITSU Contents 1. Definition of automated driving.
Autonomous Driving Technologies for Advanced Driver Assist System Toyota Motor Corporation Advanced Vehicle Control System Development Div. Hiroyuki KANEMITSU Contents 1. Definition of automated driving.
REAL AND VIRTUAL PROVING OF AUTOMATED DRIVING IN BERLIN'S MIXED TRAFFIC. Dr. Ilja Radusch,
 REAL AND VIRTUAL PROVING OF AUTOMATED DRIVING IN BERLIN'S MIXED TRAFFIC Dr. Ilja Radusch, ilja.radusch@fokus.fraunhofer.de 10.05.2017 WHO AM I? Director Smart Mobility at Fraunhofer Fraunhofer is Europe
REAL AND VIRTUAL PROVING OF AUTOMATED DRIVING IN BERLIN'S MIXED TRAFFIC Dr. Ilja Radusch, ilja.radusch@fokus.fraunhofer.de 10.05.2017 WHO AM I? Director Smart Mobility at Fraunhofer Fraunhofer is Europe
GENERIC EPS MODEL Generic Modeling and Control of an Electromechanical Power Steering System for Virtual Prototypes
 GENERIC EPS MODEL Generic Modeling and Control of an Electromechanical Power Steering System for Virtual Prototypes Dipl.-Ing. Roman Mannale, Volker Ewald, Dr.-Ing. Markus Bauer Adam Opel AG, Control Systems
GENERIC EPS MODEL Generic Modeling and Control of an Electromechanical Power Steering System for Virtual Prototypes Dipl.-Ing. Roman Mannale, Volker Ewald, Dr.-Ing. Markus Bauer Adam Opel AG, Control Systems
Siemens ADAS. Collision avoidance as the first step towards autonomous driving
 Siemens ADAS Collision avoidance as the first step towards autonomous driving siemens.com/mobility-services Advanced Driver Assistance Systems help to avoid collisions and represent the first step towards
Siemens ADAS Collision avoidance as the first step towards autonomous driving siemens.com/mobility-services Advanced Driver Assistance Systems help to avoid collisions and represent the first step towards
Új technológiák a közlekedésbiztonság jövőjéért
 Új technológiák a közlekedésbiztonság jövőjéért Dr. Szászi István Occupant Safety Robert Bosch Kft. 1 Outline 1. Active and Passive Safety - definition 2. Driver Information Functions 3. Driver Assistance
Új technológiák a közlekedésbiztonság jövőjéért Dr. Szászi István Occupant Safety Robert Bosch Kft. 1 Outline 1. Active and Passive Safety - definition 2. Driver Information Functions 3. Driver Assistance
State-of-the-Art and Future Trends in Testing of Active Safety Systems
 State-of-the-Art and Future Trends in Testing of Active Safety Systems Empirical Study Results with the Swedish Alessia Knauss (Chalmers), Christian Berger (GU), and Henrik Eriksson (SP) A-TEAM project
State-of-the-Art and Future Trends in Testing of Active Safety Systems Empirical Study Results with the Swedish Alessia Knauss (Chalmers), Christian Berger (GU), and Henrik Eriksson (SP) A-TEAM project
LiDAR and the Autonomous Vehicle Revolution for Truck and Ride Sharing Fleets
 July 12, 2017 LiDAR and the Autonomous Vehicle Revolution for Truck and Ride Sharing Fleets Louay Eldada CEO and Co-founder, Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State
July 12, 2017 LiDAR and the Autonomous Vehicle Revolution for Truck and Ride Sharing Fleets Louay Eldada CEO and Co-founder, Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State
AND CHANGES IN URBAN MOBILITY PATTERNS
 TECHNOLOGY-ENABLED MOBILITY: Virtual TEsting of Autonomous Vehicles AND CHANGES IN URBAN MOBILITY PATTERNS Technology-Enabled Mobility In the era of the digital revolution everything is inter-connected.
TECHNOLOGY-ENABLED MOBILITY: Virtual TEsting of Autonomous Vehicles AND CHANGES IN URBAN MOBILITY PATTERNS Technology-Enabled Mobility In the era of the digital revolution everything is inter-connected.
Driving simulation and Scenario Factory for Automated Vehicle validation
 Driving simulation and Scenario Factory for Automated Vehicle validation Pr. Andras Kemeny Scientific Director, A. V. Simulation Expert Leader, Renault INDEX 1. Introduction of autonomous driving 2. Validation
Driving simulation and Scenario Factory for Automated Vehicle validation Pr. Andras Kemeny Scientific Director, A. V. Simulation Expert Leader, Renault INDEX 1. Introduction of autonomous driving 2. Validation
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF
 AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
dspace GmbH Rathenaustr Paderborn Germany dspace Technology Conference Workshop #2
 dspace Engineering - Mechatronic Test Benches Matthias Deter Group Manager Engineering E-Drive Applications dspace Technology Conference 2017 Workshop #2 dspace GmbH Rathenaustr. 26 33102 Paderborn Germany
dspace Engineering - Mechatronic Test Benches Matthias Deter Group Manager Engineering E-Drive Applications dspace Technology Conference 2017 Workshop #2 dspace GmbH Rathenaustr. 26 33102 Paderborn Germany
BMW GROUP TECHNOLOGY WORKSHOPS AUTOMATED DRIVING-DIGITALIZATION MOBILITY SERVICES. December 2016
 BMW GROUP TECHNOLOGY WORKSHOPS AUTOMATED DRIVING-DIGITALIZATION MOBILITY SERVICES December 2016 DISCLAIMER. This document contains forward-looking statements that reflect BMW Group s current views about
BMW GROUP TECHNOLOGY WORKSHOPS AUTOMATED DRIVING-DIGITALIZATION MOBILITY SERVICES December 2016 DISCLAIMER. This document contains forward-looking statements that reflect BMW Group s current views about
VALET project: how connected and automated driving will change urban parking? Proposition technique
 VALET project: how connected and automated driving will change urban parking? Proposition technique 1 AKKA Vision on the future of mobility EE architecture Powertrain Power storage New body design Robotised
VALET project: how connected and automated driving will change urban parking? Proposition technique 1 AKKA Vision on the future of mobility EE architecture Powertrain Power storage New body design Robotised
Trends in der Fahrzeugsicherheit Vortragsreihe: Innovationen in der Fahrzeugtechnik. Dipl.-Ing. James Remfrey FH Joanneum, Graz, 2.
 Trends in der Fahrzeugsicherheit Vortragsreihe: Innovationen in der Fahrzeugtechnik FH Joanneum, Graz, 2. Juni 2010 Driving You Safely: ContiGuard 2 Continental AG Strong Divisions and Business Units 3
Trends in der Fahrzeugsicherheit Vortragsreihe: Innovationen in der Fahrzeugtechnik FH Joanneum, Graz, 2. Juni 2010 Driving You Safely: ContiGuard 2 Continental AG Strong Divisions and Business Units 3
Vehicle Integration of multiple ADAS HMI Concept and Architecture
 Vehicle Integration of multiple ADAS HMI Concept and Architecture Dr. J. Happe, M. Lütz 2. Tagung "Aktive Sicherheit durch Fahrerassistenz" 4. April 2006 Multiple Advanced Driver Assistance Systems Main
Vehicle Integration of multiple ADAS HMI Concept and Architecture Dr. J. Happe, M. Lütz 2. Tagung "Aktive Sicherheit durch Fahrerassistenz" 4. April 2006 Multiple Advanced Driver Assistance Systems Main
Autnonomous Vehicles: Societal and Technological Evolution (Invited Contribution)
") Autnonomous Vehicles: Societal and Technological Evolution (Invited Contribution) Christian Laugier To cite this version: Christian Laugier. Autnonomous Vehicles: Societal and Technological Evolution (Invited
Autnonomous Vehicles: Societal and Technological Evolution (Invited Contribution) Christian Laugier To cite this version: Christian Laugier. Autnonomous Vehicles: Societal and Technological Evolution (Invited
Environmental Envelope Control
 Environmental Envelope Control May 26 th, 2014 Stanford University Mechanical Engineering Dept. Dynamic Design Lab Stephen Erlien Avinash Balachandran J. Christian Gerdes Motivation New technologies are
Environmental Envelope Control May 26 th, 2014 Stanford University Mechanical Engineering Dept. Dynamic Design Lab Stephen Erlien Avinash Balachandran J. Christian Gerdes Motivation New technologies are
Security for the Autonomous Vehicle Identifying the Challenges
 Security for the Autonomous Vehicle Identifying the Challenges Mike Parris Head of Secure Car Division November 2016 Today s agenda A Definition Developing a Threat Model Key Findings Conclusions 2 A Definition
Security for the Autonomous Vehicle Identifying the Challenges Mike Parris Head of Secure Car Division November 2016 Today s agenda A Definition Developing a Threat Model Key Findings Conclusions 2 A Definition
The path towards Autonomous Driving
 The path towards Autonomous Driving Dr. Martin Duncan AEIT Seminario Catania, 17th November 2 Introduction Cameras and the path towards autonomous driving Need of supplementary sensors Conclusions The
The path towards Autonomous Driving Dr. Martin Duncan AEIT Seminario Catania, 17th November 2 Introduction Cameras and the path towards autonomous driving Need of supplementary sensors Conclusions The
AUTONOMOUS DRIVING COLLABORATIVE APPROACH NEEDED FOR BIG BUSINESS. Innovation Bazaar, Vehicle ICT Arena ver 2. RISE Viktoria Kent Eric Lång
 AUTONOMOUS DRIVING COLLABORATIVE APPROACH NEEDED FOR BIG BUSINESS Innovation Bazaar, Vehicle ICT Arena 2018-02-08 ver 2 Research Institutes of Sweden RISE Viktoria Kent Eric Lång 2 AUTONOMOUS DRIVING AND
AUTONOMOUS DRIVING COLLABORATIVE APPROACH NEEDED FOR BIG BUSINESS Innovation Bazaar, Vehicle ICT Arena 2018-02-08 ver 2 Research Institutes of Sweden RISE Viktoria Kent Eric Lång 2 AUTONOMOUS DRIVING AND
Smart Control for Electric/Autonomous Vehicles
 Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
Syllabus: Automated, Connected, and Intelligent Vehicles
 Page 1 of 8 Syllabus: Automated, Connected, and Intelligent Vehicles Part 1: Course Information Description: Automated, Connected, and Intelligent Vehicles is an advanced automotive technology course that
Page 1 of 8 Syllabus: Automated, Connected, and Intelligent Vehicles Part 1: Course Information Description: Automated, Connected, and Intelligent Vehicles is an advanced automotive technology course that
AI challenges for Automated & Connected Vehicles
 AI challenges for Automated & Connected Vehicles Pr. Fabien MOUTARDE Center for Robotics MINES ParisTech PSL Université Fabien.Moutarde@mines-paristech.fr http://people.mines-paristech.fr/fabien.moutarde
AI challenges for Automated & Connected Vehicles Pr. Fabien MOUTARDE Center for Robotics MINES ParisTech PSL Université Fabien.Moutarde@mines-paristech.fr http://people.mines-paristech.fr/fabien.moutarde
Five Cool Things You Can Do With Powertrain Blockset The MathWorks, Inc. 1
 Five Cool Things You Can Do With Powertrain Blockset Mike Sasena, PhD Automotive Product Manager 2017 The MathWorks, Inc. 1 FTP75 Simulation 2 Powertrain Blockset Value Proposition Perform fuel economy
Five Cool Things You Can Do With Powertrain Blockset Mike Sasena, PhD Automotive Product Manager 2017 The MathWorks, Inc. 1 FTP75 Simulation 2 Powertrain Blockset Value Proposition Perform fuel economy
Euro NCAP Safety Assist
 1 SA -1 Content Euro NCAP Safety Assist Road Map 2020 2 SA -2 1 Content Euro NCAP Safety Assist 3 SA -3 Overall Rating 2015 4 SA -4 2 Safety Assist - Overview 2016+ 0 Points 2016+ 3 Points 5 SA -5 SBR
1 SA -1 Content Euro NCAP Safety Assist Road Map 2020 2 SA -2 1 Content Euro NCAP Safety Assist 3 SA -3 Overall Rating 2015 4 SA -4 2 Safety Assist - Overview 2016+ 0 Points 2016+ 3 Points 5 SA -5 SBR
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
THE FUTURE OF AUTONOMOUS CARS
 Index Table of Contents Table of Contents... i List of Figures... ix Executive summary... 1 1 Introduction to autonomous cars... 3 1.1 Definitions and classifications... 3 1.2 Brief history of autonomous
Index Table of Contents Table of Contents... i List of Figures... ix Executive summary... 1 1 Introduction to autonomous cars... 3 1.1 Definitions and classifications... 3 1.2 Brief history of autonomous
Mobileye Мировой лидер в создании системы помощи водителю для предотвращения аварий и технологии автономного вождения.
 Mobileye Мировой лидер в создании системы помощи водителю для предотвращения аварий и технологии автономного вождения. Mobileye История A taste of our technology Early warning saves lives over 90% of collisions
Mobileye Мировой лидер в создании системы помощи водителю для предотвращения аварий и технологии автономного вождения. Mobileye История A taste of our technology Early warning saves lives over 90% of collisions
Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications
 Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications Jiaqi Ma Assistant Professor University of Cincinnati ITS Midwest Annual Meeting Columbus, Ohio, September 29, 2017 Outline
Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications Jiaqi Ma Assistant Professor University of Cincinnati ITS Midwest Annual Meeting Columbus, Ohio, September 29, 2017 Outline
Cooperative Autonomous Driving and Interaction with Vulnerable Road Users
 9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
Powertrain and Chassis Hardware-in-the- Loop (HIL) Simulation of Ford s Autonomous Vehicle Platform
 Simulation of Ford s Autonomous Vehicle Platform") Powertrain and Chassis Hardware-in-the- Loop (HIL) Simulation of Ford s Autonomous Vehicle Platform Adit Joshi Research Engineer Automated Driving HIL Simulation Ford Motor Company 1 OUTLINE Autonomous
Powertrain and Chassis Hardware-in-the- Loop (HIL) Simulation of Ford s Autonomous Vehicle Platform Adit Joshi Research Engineer Automated Driving HIL Simulation Ford Motor Company 1 OUTLINE Autonomous
SIMULATION AND DATA XPERIENCE
 SIMULATION AND DATA XPERIENCE AVL Solutions Overview in context of RDE AVL List GmbH Dr. F. Pfister, Dr. C. Schyr, Dr. T. Düser, B. Schick, Dr. B. Behr CHALLENGES OF REAL DRIVING EMISSION Real Driving
SIMULATION AND DATA XPERIENCE AVL Solutions Overview in context of RDE AVL List GmbH Dr. F. Pfister, Dr. C. Schyr, Dr. T. Düser, B. Schick, Dr. B. Behr CHALLENGES OF REAL DRIVING EMISSION Real Driving
Maneuver based testing of integrated vehicle safety systems
 Maneuver based testing of integrated vehicle safety systems Rudolf Ertlmeier 1 Kathrin Sattler 1, Andreas Raith 1, Thomas Brandmeier 1 Daouda Sadou 2, Christian Schyr 3 1 Institute for Applied Research
Maneuver based testing of integrated vehicle safety systems Rudolf Ertlmeier 1 Kathrin Sattler 1, Andreas Raith 1, Thomas Brandmeier 1 Daouda Sadou 2, Christian Schyr 3 1 Institute for Applied Research
Aria Etemad Volkswagen Group Research. Key Results. Aachen 28 June 2017
 Aria Etemad Volkswagen Group Research Key Results Aachen 28 June 2017 28 partners 2 // 28 June 2017 AdaptIVe Final Event, Aachen Motivation for automated driving functions Zero emission Reduction of fuel
Aria Etemad Volkswagen Group Research Key Results Aachen 28 June 2017 28 partners 2 // 28 June 2017 AdaptIVe Final Event, Aachen Motivation for automated driving functions Zero emission Reduction of fuel
ENGINEERING FOR HUMANS STPA ANALYSIS OF AN AUTOMATED PARKING SYSTEM
 ENGINEERING FOR HUMANS STPA ANALYSIS OF AN AUTOMATED PARKING SYSTEM Massachusetts Institute of Technology John Thomas Megan France General Motors Charles A. Green Mark A. Vernacchia Padma Sundaram Joseph
ENGINEERING FOR HUMANS STPA ANALYSIS OF AN AUTOMATED PARKING SYSTEM Massachusetts Institute of Technology John Thomas Megan France General Motors Charles A. Green Mark A. Vernacchia Padma Sundaram Joseph
future of mobility DI STEFANIE PYKA, ROBERT BOSCH AG WIEN
 future of mobility DI STEFANIE PYKA, ROBERT BOSCH AG WIEN Megatrends Changes of customer requirements and mobility Demography Urbanization Energy & Climate Connected World Average global age will be 33.2
future of mobility DI STEFANIE PYKA, ROBERT BOSCH AG WIEN Megatrends Changes of customer requirements and mobility Demography Urbanization Energy & Climate Connected World Average global age will be 33.2
Integrated. Safety Handbook. Automotive. Ulrich Seiffert and Mark Gonter. Warrendale, Pennsylvania, USA INTERNATIONAL.
 Integrated Automotive Safety Handbook Ulrich Seiffert and Mark Gonter INTERNATIONAL. Warrendale, Pennsylvania, USA Table of Contents Preface ix Chapter 1 The Need to Increase Road Safety 1 1.1 Introduction
Integrated Automotive Safety Handbook Ulrich Seiffert and Mark Gonter INTERNATIONAL. Warrendale, Pennsylvania, USA Table of Contents Preface ix Chapter 1 The Need to Increase Road Safety 1 1.1 Introduction
Simulink as a Platform for Full Vehicle Simulation
 Simulink as a Platform for Full Vehicle Simulation Mike Sasena (Product Manager) Lars Krause (Application Engineer) Ryan Chladny (Development) 2018 The MathWorks, Inc. 1 Fuel Economy Simulation 2 Vehicle
Simulink as a Platform for Full Vehicle Simulation Mike Sasena (Product Manager) Lars Krause (Application Engineer) Ryan Chladny (Development) 2018 The MathWorks, Inc. 1 Fuel Economy Simulation 2 Vehicle