CONNECTED AUTOMATION HOW ABOUT SAFETY?
|
|
|
- Darcy McDowell
- 6 years ago
- Views:
Transcription

1 CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016



2 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal themes employees world-wide Annual turnover of 600+ million Global presence and projects Connected automation 09 September 2016




")
3 TNO AUTOMOTIVE RESEARCH Supporting the automotive industry with innovative solutions, using: In-depth knowledge and expertise in multiple domains Strong portfolio of Intellectual Property and White Box Software Algorithms Highly skilled and experienced workforce Unique state-of-the-art research facilities Advanced tools & methods for fast and robust application development Focus on accelerating the deployment of cooperative automated driving systems in various application domains (car, truck, bus, AGV) Connected automation 09 September 2016

4 THE NEAR AND THE FULL POTENTIAL TNO s VISION: The full potential of automated driving can only be reached by combining cooperative driving (V2x enabled) and automated driving to improve: Vehicle and traffic efficiency Comfort Safety Source: Ministry of Infrastructure &Environment / RWS 2016 Connected automation 09 September 2016

 Connected automation")
5 AUTOMATED VS COOPERATIVE AUTOMATED Google car in desert vs C-ACC Toyota Prius on Dutch highway Action reaction Intention coordinated reaction Conclusion: Automated vehicle: priority on interacting with environment (reactive) Cooperative vehicle: priority on understanding traffic behavior, taking coordinated action (proactive) Connected automation 09 September 2016
6 COMMUNICATION SUPPORTS SAFETY No communication between vehicles = no understanding of each others intention Result: action results easier in over-reaction Effect: (too) late (emergency) braking accidents and/or (ghost) traffic jams bad cooperation on high ways unsafe and inefficient merging Late detection of presence of vulnerable road users unsafe urban intersections Unclear interaction with safety vehicles unsafe and inefficient for both safety and normal vehicle. and many more unsafe scenarios Cooperative automated driving systems makes these type of typical traffic situations safer (no overreaction = smoother traffic = less chance for accident) Boundary conditions: To build a safety application, the supporting systems need to be functionally safe under all conditions, in all scenarios. How do we assure this? Connected automation 09 September 2016
7 SOME EXAMPLES OF COOPERATIVE AUTOMATED DRIVING (CAD) Connected automation 09 September 2016


8 EXAMPLE I COOPERATIVE AUTOMATED CRUISE CONTROL (C-ACC) Vehicles drive at short and constant inter-vehicle distance Desired accelaration is shared Inter vehicle distance down to 0,25 sec. Immediate braking, safe, String stable = no harmonica effect i.e. no exitation = increased safety Connected automation 09 September 2016






9 EXAMPLE II INNOVATIONS IN CYCLIST SAFETY SOLUTIONS INFRASTRUCTURE PERSPECTIVE: Communication of information collected by the infrastructure cooperative technology Car with C-AEB Road Side Unit Road Side Unit communicates the bicycle trajectory to the approaching car through WiFi-p Car calculates risk of collision In case of risk, a warning is issued to the driver and automatic breaking is applied for the car A newly developed intelligent bike warns the cyclist with haptic signals to hazards identified by the Road Side Unit Infrastructure sensors can be used to get a detailed insight in common cyclist behaviour patterns Cyclist Connected automation 09 September 2016
10 EXAMPLE III COOPERATIVE AUTOMATED MERGING (GCDC 2016) Builds on GCDC 2011 platooning skills Automated vehicles Level 1 or Level 2 Negotiation required to optimize merging of 2 platoons before construction site Challenge is to negotiate and perform the merge before the lane is closed For evaluation the scenario will be repeated multiple times with different constellations of teams Connected automation 09 September 2016
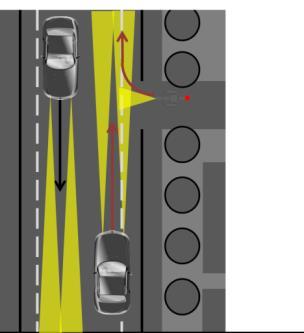
11 EXAMPLE IV COOPERATIVE AUTOMATED GAP MAKING FOR SAFETY VEHICLES (GCDC 2016) Demonstrates a traffic situation where cooperative vehicles reduces risk and maintains traffic flow Potential to use existing cellular technology and mobile app Using geo-networking to target relevant road sections Movie Connected automation 09 September 2016
12 NICE EXAMPLES, BUT HOW DO WE ASSURE FUNCTIONAL SAFETY OF THE UNDERLYING CAD SYSTEMS UNDER ALL CONDITIONS? How do we collect all the relevant scenarios that represent all conditions? Which scenario s are most severe? How often do they appear? Streetwise approach Connected automation 09 September 2016
, ALL SCENARIOS BECOME IMPORTANT : Traditionally, test cases are designed based on accidentology For ADS in general, also frequent every day traffic scenarios (with multiple parameters) need to")
: Type of MIO Speed profile Past trajectory > predicted trajectory Behaviour > focussed vs.")
13 CURRENT DEVELOPMENTS FOR AUTOMATED DRIVING SYSTEMS (incl. ADAS), ALL SCENARIOS BECOME IMPORTANT : Traditionally, test cases are designed based on accidentology For ADS in general, also frequent every day traffic scenarios (with multiple parameters) need to be considered: turning left bicycle car going straight turning right Most relevant conflict scenarios 6 >36 Relevant interaction scenarios Many cyclists are present in the scene Multiple MIOs (most important objects): Type of MIO Speed profile Past trajectory > predicted trajectory Behaviour > focussed vs. undetermined Infrastructure related parameters (type of road, intersection, traffic rules, view-blocking obstructions, ) Presence and manoeuvres of other road users in the scenery Disturbances (weather/lighting conditions, road works, ) Connected automation 09 September 2016
 Use library of scenarios in virtual testing for development and implementation Scenario: A typical maneuver on the road with the complete set of")

14 #km / scenario on the road CHALLENGE Determine real-life performance without driving multiple million km: Data collection under real-life conditions on the road Data analysis: scenario identification & classification (big data solutions required) Use library of scenarios in virtual testing for development and implementation Scenario: A typical maneuver on the road with the complete set of relevant conditions and trajectories of other traffic participants that have an interaction with the host vehicle over a relevant time period (order of seconds) A ride on the road can in this way be described by a continuous sequence of scenarios Scenarios might partly overlap in time Criteria for scenario distinction / classification Criterion of required # km / scenario Connected automation 1 i Scenario identifier N 09 September 2016



15 HOW TO COLLECT THE RELEVANT SCENARIOS? Connected automation 09 September 2016






 Physical")

16 Reference measurements with ground truth: - vehicle - infrastructure Real life vehicle data STREETWISE ARCHITECTURE IDENTIFY, CLASSIFY AND STORE SCENARIOS Accident databases UDRIVE Euro NCAP Big Data Vehicle data Sensor data Vehicle data Sensor data Vehicle data Sensor data # RAW DATA STORAGE - vehicle - sensors - annotations Run identification and classification algorithms SCENARIO DATABASE incl. all characteristic parameters Calibration based on ground truth Develop classification algorithms (deep learning) Select scenarios Vary parameters BEHAVIOUR MODELS - pedestrians - bicyclists - vehicles Select various target behaviour EVALUATION OF (C) AD systems: Virtual testing (extensive set) Physical testing (limited # of km) Movie scenario generation: Connected automation 09 September 2016
 we need an efficient approach to collect, identify and classify all relevant scenarios Connected automation 09 September")
17 CONCLUSION Cooperative Automated Driving (CAD) will bring the full potential of vehicle and traffic safety To make CAD (functionally) safe under all relevant conditions (road, weather, traffic) we need an efficient approach to collect, identify and classify all relevant scenarios Connected automation 09 September 2016
18 THANK YOU FOR YOUR ATTENTION QUESTIONS?
Cooperative brake technology
 Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
Cooperative Autonomous Driving and Interaction with Vulnerable Road Users
 9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
H2020 (ART ) CARTRE SCOUT
 CARTRE SCOUT") H2020 (ART-06-2016) CARTRE SCOUT Objective Advance deployment of connected and automated driving across Europe October 2016 September 2018 Coordination & Support Action 2 EU-funded Projects 36 consortium
H2020 (ART-06-2016) CARTRE SCOUT Objective Advance deployment of connected and automated driving across Europe October 2016 September 2018 Coordination & Support Action 2 EU-funded Projects 36 consortium
China Intelligent Connected Vehicle Technology Roadmap 1
 China Intelligent Connected Vehicle Technology Roadmap 1 Source: 1. China Automotive Engineering Institute, , Oct. 2016 1 Technology Roadmap 1 General
China Intelligent Connected Vehicle Technology Roadmap 1 Source: 1. China Automotive Engineering Institute, , Oct. 2016 1 Technology Roadmap 1 General
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS
 EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm)
") Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) ADAS and Automated Driving Functionality Blessing and Curse Alfred Eckert, Head
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) ADAS and Automated Driving Functionality Blessing and Curse Alfred Eckert, Head
AUTONOMOUS DRIVING COLLABORATIVE APPROACH NEEDED FOR BIG BUSINESS. Innovation Bazaar, Vehicle ICT Arena ver 2. RISE Viktoria Kent Eric Lång
 AUTONOMOUS DRIVING COLLABORATIVE APPROACH NEEDED FOR BIG BUSINESS Innovation Bazaar, Vehicle ICT Arena 2018-02-08 ver 2 Research Institutes of Sweden RISE Viktoria Kent Eric Lång 2 AUTONOMOUS DRIVING AND
AUTONOMOUS DRIVING COLLABORATIVE APPROACH NEEDED FOR BIG BUSINESS Innovation Bazaar, Vehicle ICT Arena 2018-02-08 ver 2 Research Institutes of Sweden RISE Viktoria Kent Eric Lång 2 AUTONOMOUS DRIVING AND
Truck Safety Applications for Cost- Efficient Laser Scanner Sensors Grant Grubb, Volvo Trucks, Sweden
 Truck Safety Applications for Cost- Efficient Laser Scanner Sensors Grant Grubb, Volvo Trucks, Sweden Overview 1. Introduction 2. Relevant Detection Regions 3. Truck Applications a. Start Inhibit b. Right-turn
Truck Safety Applications for Cost- Efficient Laser Scanner Sensors Grant Grubb, Volvo Trucks, Sweden Overview 1. Introduction 2. Relevant Detection Regions 3. Truck Applications a. Start Inhibit b. Right-turn
Traffic Operations with Connected and Automated Vehicles
 Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
Our Market and Sales Outlook
 Our Market and Sales Outlook Art Blanchford Executive Vice President Sales and Product Planning 1 Leading Market Position in Large and Rapid Growing Market Addressable Market including potential opportunity
Our Market and Sales Outlook Art Blanchford Executive Vice President Sales and Product Planning 1 Leading Market Position in Large and Rapid Growing Market Addressable Market including potential opportunity
Leveraging AI for Self-Driving Cars at GM. Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel
 Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help?
 Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
Can STPA contribute to identify hazards of different natures and improve safety of automated vehicles?
 Can STPA contribute to identify hazards of different natures and improve safety of automated vehicles? Stephanie Alvarez, Franck Guarnieri & Yves Page (MINES ParisTech, PSL Research University and RENAULT
Can STPA contribute to identify hazards of different natures and improve safety of automated vehicles? Stephanie Alvarez, Franck Guarnieri & Yves Page (MINES ParisTech, PSL Research University and RENAULT
State of the art ISA, LKAS & AEB. Yoni Epstein ADAS Program Manager Advanced Development
 State of the art ISA, LKAS & AEB Yoni Epstein ADAS Program Manager Advanced Development Mobileye, an Intel Company: The world leader in Advanced Driver Assistance Systems (ADAS) In 1999, Prof. Amnon Shashua
State of the art ISA, LKAS & AEB Yoni Epstein ADAS Program Manager Advanced Development Mobileye, an Intel Company: The world leader in Advanced Driver Assistance Systems (ADAS) In 1999, Prof. Amnon Shashua
Automated driving in urban environments: technical challenges, open problems and barriers. Fawzi Nashashibi
 Automated driving in urban environments: technical challenges, open problems and barriers Fawzi Nashashibi 6th Workshop on Planning, Perception and Navigation for Intelligent Vehicles SEPTEMBER 14, 2014
Automated driving in urban environments: technical challenges, open problems and barriers Fawzi Nashashibi 6th Workshop on Planning, Perception and Navigation for Intelligent Vehicles SEPTEMBER 14, 2014
REAL AND VIRTUAL PROVING OF AUTOMATED DRIVING IN BERLIN'S MIXED TRAFFIC. Dr. Ilja Radusch,
 REAL AND VIRTUAL PROVING OF AUTOMATED DRIVING IN BERLIN'S MIXED TRAFFIC Dr. Ilja Radusch, ilja.radusch@fokus.fraunhofer.de 10.05.2017 WHO AM I? Director Smart Mobility at Fraunhofer Fraunhofer is Europe
REAL AND VIRTUAL PROVING OF AUTOMATED DRIVING IN BERLIN'S MIXED TRAFFIC Dr. Ilja Radusch, ilja.radusch@fokus.fraunhofer.de 10.05.2017 WHO AM I? Director Smart Mobility at Fraunhofer Fraunhofer is Europe
TOWARDS ACCIDENT FREE DRIVING
 ETSI SUMMIT: 5G FROM MYTH TO REALITY TOWARDS ACCIDENT FREE DRIVING Niels Peter Skov Andersen, General Manager Car 2 Car Communication Consortium All rights reserved How do we stop the cars colliding First
ETSI SUMMIT: 5G FROM MYTH TO REALITY TOWARDS ACCIDENT FREE DRIVING Niels Peter Skov Andersen, General Manager Car 2 Car Communication Consortium All rights reserved How do we stop the cars colliding First
AdaptIVe: Automated driving applications and technologies for intelligent vehicles
 Jens Langenberg Aachen 06 October 2015 AdaptIVe: Automated driving applications and technologies for intelligent vehicles Facts Budget: European Commission: EUR 25 Million EUR 14,3 Million Duration: 42
Jens Langenberg Aachen 06 October 2015 AdaptIVe: Automated driving applications and technologies for intelligent vehicles Facts Budget: European Commission: EUR 25 Million EUR 14,3 Million Duration: 42
Safety Considerations of Autonomous Vehicles. Darren Divall Head of International Road Safety TRL
 Safety Considerations of Autonomous Vehicles Darren Divall Head of International Road Safety TRL TRL History Autonomous Vehicles TRL Self-driving car, 1960s Testing partial automation, TRL, 2000s Testing
Safety Considerations of Autonomous Vehicles Darren Divall Head of International Road Safety TRL TRL History Autonomous Vehicles TRL Self-driving car, 1960s Testing partial automation, TRL, 2000s Testing
ITS and connected cars
 Säkra Nordiska tunnlar - med ITS Copenhagen, 21 May 2015 ITS and connected cars Jacob Bangsgaard Director General, FIA Region I FIA REGION I FIA Region I is a consumer body representing 111 Mobility Clubs
Säkra Nordiska tunnlar - med ITS Copenhagen, 21 May 2015 ITS and connected cars Jacob Bangsgaard Director General, FIA Region I FIA REGION I FIA Region I is a consumer body representing 111 Mobility Clubs
AN ANALYSIS OF DRIVER S BEHAVIOR AT MERGING SECTION ON TOKYO METOPOLITAN EXPRESSWAY WITH THE VIEWPOINT OF MIXTURE AHS SYSTEM
 AN ANALYSIS OF DRIVER S BEHAVIOR AT MERGING SECTION ON TOKYO METOPOLITAN EXPRESSWAY WITH THE VIEWPOINT OF MIXTURE AHS SYSTEM Tetsuo Shimizu Department of Civil Engineering, Tokyo Institute of Technology
AN ANALYSIS OF DRIVER S BEHAVIOR AT MERGING SECTION ON TOKYO METOPOLITAN EXPRESSWAY WITH THE VIEWPOINT OF MIXTURE AHS SYSTEM Tetsuo Shimizu Department of Civil Engineering, Tokyo Institute of Technology
The connected vehicle is the better vehicle!
 AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
The Car-2-Car Communication Consortium Roadmaps beyond Day-1
 The Car-2-Car Communication Consortium Roadmaps beyond Day-1 C2C-CC Guiding principles for V2X roadmaps Focus on information exchange (between traffic participants) Cooperate on providing information Provide
The Car-2-Car Communication Consortium Roadmaps beyond Day-1 C2C-CC Guiding principles for V2X roadmaps Focus on information exchange (between traffic participants) Cooperate on providing information Provide
Test & Validation Challenges Facing ADAS and CAV
 Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
SIMULATING AUTONOMOUS VEHICLES ON OUR TRANSPORT NETWORKS
 SIMULATING AUTONOMOUS VEHICLES ON OUR TRANSPORT NETWORKS www.ptvgroup.com Alastair Evanson, Solution Director PTV Vissim TOMORROW S CONNECTED & BUSINESS AUTONOMOUS MODEL: VEHICLES SIGNIFICANT SHIFT TO
SIMULATING AUTONOMOUS VEHICLES ON OUR TRANSPORT NETWORKS www.ptvgroup.com Alastair Evanson, Solution Director PTV Vissim TOMORROW S CONNECTED & BUSINESS AUTONOMOUS MODEL: VEHICLES SIGNIFICANT SHIFT TO
ZF Advances Key Technologies for Automated Driving
 Page 1/5, January 9, 2017 ZF Advances Key Technologies for Automated Driving ZF s See Think Act supports self-driving cars and trucks ZF and NVIDIA provide computing power to bring artificial intelligence
Page 1/5, January 9, 2017 ZF Advances Key Technologies for Automated Driving ZF s See Think Act supports self-driving cars and trucks ZF and NVIDIA provide computing power to bring artificial intelligence
Corporate Overview and Introduction to Test & Validation Challenges Facing ADAS and CAV
 Corporate Overview and Introduction to Test & Validation Challenges Facing ADAS and CAV Chris Reeves Head of Connected Autonomous Vehicles We are a leading engineering service provider and location for
Corporate Overview and Introduction to Test & Validation Challenges Facing ADAS and CAV Chris Reeves Head of Connected Autonomous Vehicles We are a leading engineering service provider and location for
The Digital Future of Driving Dr. László Palkovics State Secretary for Education
 The Digital Future of Driving Dr. László Palkovics State Secretary for Education 1. WHAT IS THE CHALLENGE? What is the challenge? Mobility Challenges Inspirating factors for development 1 Zero Emission
The Digital Future of Driving Dr. László Palkovics State Secretary for Education 1. WHAT IS THE CHALLENGE? What is the challenge? Mobility Challenges Inspirating factors for development 1 Zero Emission
Deep Learning Will Make Truly Self-Driving Cars a Reality
 Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Safe, superior and comfortable driving - Market needs and solutions
 3 rd Conference Active Safety through Driver Assistance Safe, superior and comfortable driving - Market needs and solutions Dr. Werner Struth - President, 1 Global trends Legislation Safety legislation
3 rd Conference Active Safety through Driver Assistance Safe, superior and comfortable driving - Market needs and solutions Dr. Werner Struth - President, 1 Global trends Legislation Safety legislation
Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions
 Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions GTC Europe 2017 Dominik Dörr 2 Motivation Virtual Prototypes Virtual Sensor Models CarMaker and NVIDIA DRIVE PX
Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions GTC Europe 2017 Dominik Dörr 2 Motivation Virtual Prototypes Virtual Sensor Models CarMaker and NVIDIA DRIVE PX
State-of-the-Art and Future Trends in Testing of Active Safety Systems
 State-of-the-Art and Future Trends in Testing of Active Safety Systems Empirical Study Results with the Swedish Alessia Knauss (Chalmers), Christian Berger (GU), and Henrik Eriksson (SP) A-TEAM project
State-of-the-Art and Future Trends in Testing of Active Safety Systems Empirical Study Results with the Swedish Alessia Knauss (Chalmers), Christian Berger (GU), and Henrik Eriksson (SP) A-TEAM project
C-ITS status in Europe and Outlook
 C-ITS status in Europe and Outlook Car 2 Car Communication Consortium ITU Seminar 7 th June 2018 Car 2 Car Communication Consortium Communication Technology Basis ITS-G5 Dedicated Short-Range Communication
C-ITS status in Europe and Outlook Car 2 Car Communication Consortium ITU Seminar 7 th June 2018 Car 2 Car Communication Consortium Communication Technology Basis ITS-G5 Dedicated Short-Range Communication
The IAM in Pre-Selection of global automotive trends impacting the independent multi-brand aftermarket
 The IAM in 2030 Pre-Selection of global automotive trends impacting the independent multi-brand aftermarket 10th of June 2016 The automotive aftermarket is based on a highly complex value chain with a
The IAM in 2030 Pre-Selection of global automotive trends impacting the independent multi-brand aftermarket 10th of June 2016 The automotive aftermarket is based on a highly complex value chain with a
Driving simulation and Scenario Factory for Automated Vehicle validation
 Driving simulation and Scenario Factory for Automated Vehicle validation Pr. Andras Kemeny Scientific Director, A. V. Simulation Expert Leader, Renault INDEX 1. Introduction of autonomous driving 2. Validation
Driving simulation and Scenario Factory for Automated Vehicle validation Pr. Andras Kemeny Scientific Director, A. V. Simulation Expert Leader, Renault INDEX 1. Introduction of autonomous driving 2. Validation
SIP-adus Workshop A Traffic-based Method for Safety Impact Assessment of Road Vehicle Automation. Tokyo, 14 th November 2018
 SIP-adus Workshop 2018 A Traffic-based Method for Safety Impact Assessment of Road Vehicle Automation Tokyo, 14 th November 2018 Dr.-Ing. Adrian Zlocki, Christian Rösener, M.Sc., Univ.-Prof. Dr.-Ing. Lutz
SIP-adus Workshop 2018 A Traffic-based Method for Safety Impact Assessment of Road Vehicle Automation Tokyo, 14 th November 2018 Dr.-Ing. Adrian Zlocki, Christian Rösener, M.Sc., Univ.-Prof. Dr.-Ing. Lutz
Stereo-vision for Active Safety
 Stereo-vision for Active Safety Project within Vehicle and Traffic Safety, 2009-00078 Author: Vincent Mathevon (Autoliv Electronics AB) Ola Bostrom (Autoliv Development AB) Date: 2012-06-07 Content 1.
Stereo-vision for Active Safety Project within Vehicle and Traffic Safety, 2009-00078 Author: Vincent Mathevon (Autoliv Electronics AB) Ola Bostrom (Autoliv Development AB) Date: 2012-06-07 Content 1.
RESEARCH FUNDING KEY TO AUTONOMOUS DRIVING
 DRIVING FUTURE PLATFORM - MARCH 07 2018 RESEARCH FUNDING KEY TO AUTONOMOUS DRIVING DR. ECKARD STEIGER ROBERT BOSCH GMBH Automated Driving Key Element of Future Mobility Connected mobility Automated mobility
DRIVING FUTURE PLATFORM - MARCH 07 2018 RESEARCH FUNDING KEY TO AUTONOMOUS DRIVING DR. ECKARD STEIGER ROBERT BOSCH GMBH Automated Driving Key Element of Future Mobility Connected mobility Automated mobility
PORTUGUESE NETWORK FOR C-ITS
 PORTUGUESE NETWORK FOR C-ITS Rui Alves 28/11/2017 22.12.2017 www.c-roads.eu 1 Agenda GMV in ITS GMV in C-ROADS C-ITS perspective for the future 22.12.2017 www.c-roads.eu 2 Agenda GMV in ITS GMV in C-ROADS
PORTUGUESE NETWORK FOR C-ITS Rui Alves 28/11/2017 22.12.2017 www.c-roads.eu 1 Agenda GMV in ITS GMV in C-ROADS C-ITS perspective for the future 22.12.2017 www.c-roads.eu 2 Agenda GMV in ITS GMV in C-ROADS
Simulation of the influence of road traffic on the operation of an electric city bus
 Simulation of the influence of road traffic on the operation of apply & innovate 2014 Manuel Großkinsky Chair of railway system technology, Karlsruhe Institute of Technology KIT University of the State
Simulation of the influence of road traffic on the operation of apply & innovate 2014 Manuel Großkinsky Chair of railway system technology, Karlsruhe Institute of Technology KIT University of the State
CMC Roadmap. Motorcycles on track to connectivity & Evaluation of the potential of C-ITS for motorcycles on the basis of real accidents
 CMC Roadmap Motorcycles on track to connectivity & Evaluation of the potential of C-ITS for motorcycles on the basis of real accidents Christian Massong, BMW Motorrad, Germany Marcus Petzold, VUFO GmbH,
CMC Roadmap Motorcycles on track to connectivity & Evaluation of the potential of C-ITS for motorcycles on the basis of real accidents Christian Massong, BMW Motorrad, Germany Marcus Petzold, VUFO GmbH,
A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications
 Systems: Architectures, Controls, and Applications") A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications Ziran Wang (presenter), Guoyuan Wu, and Matthew J. Barth University of California, Riverside Nov.
A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications Ziran Wang (presenter), Guoyuan Wu, and Matthew J. Barth University of California, Riverside Nov.
AUTONOMOUS VEHICLES When will they get here? Copper Strategy Success Seminar. The Future of Work. 29th September 2016 MARK BORLACE
 AUTONOMOUS VEHICLES When will they get here? Copper Strategy Success Seminar The Future of Work 29th September 2016 MARK BORLACE Senior Manager Mobility & Automotive Policy Driverless cars AKA Self driving
AUTONOMOUS VEHICLES When will they get here? Copper Strategy Success Seminar The Future of Work 29th September 2016 MARK BORLACE Senior Manager Mobility & Automotive Policy Driverless cars AKA Self driving
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF
 AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
Leading the way to seamless mobility November th, 2017 Tampa, Florida
 Leading the way to seamless mobility November 14-15 th, 2017 Tampa, Florida usa.siemens.com/intelligenttraffic Urban mobility challenges A view on safety and congestion Trend Challenges + 2 Cities grow
Leading the way to seamless mobility November 14-15 th, 2017 Tampa, Florida usa.siemens.com/intelligenttraffic Urban mobility challenges A view on safety and congestion Trend Challenges + 2 Cities grow
Driver Assistance & Autonomous Driving
 Driver Assistance & Autonomous Driving Challenges and Opportunities Presented by Marc Seguer ADAS, Chasis Development SEAT, S.A. 30/03/2016 1 Driver Assistance & Autonomous Driving / Prepared by Marc Seguer
Driver Assistance & Autonomous Driving Challenges and Opportunities Presented by Marc Seguer ADAS, Chasis Development SEAT, S.A. 30/03/2016 1 Driver Assistance & Autonomous Driving / Prepared by Marc Seguer
WHITE PAPER Autonomous Driving A Bird s Eye View
 WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System
 System") Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System 2017 Los Angeles Environmental Forum August 28th Ziran Wang ( 王子然 ), Guoyuan Wu, Peng Hao, Kanok Boriboonsomsin, and Matthew
Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System 2017 Los Angeles Environmental Forum August 28th Ziran Wang ( 王子然 ), Guoyuan Wu, Peng Hao, Kanok Boriboonsomsin, and Matthew
Session: Connected Vehicles Status of C-ITS Deployment in Europe
 Session: Connected Vehicles Status of C-ITS Deployment in Europe Vincent BLERVAQUE Independent Consultant and ITS Expert Member of European C-ITS Deployment Platform C-The Difference Pilot Project Manager
Session: Connected Vehicles Status of C-ITS Deployment in Europe Vincent BLERVAQUE Independent Consultant and ITS Expert Member of European C-ITS Deployment Platform C-The Difference Pilot Project Manager
Siemens ADAS. Collision avoidance as the first step towards autonomous driving
 Siemens ADAS Collision avoidance as the first step towards autonomous driving siemens.com/mobility-services Advanced Driver Assistance Systems help to avoid collisions and represent the first step towards
Siemens ADAS Collision avoidance as the first step towards autonomous driving siemens.com/mobility-services Advanced Driver Assistance Systems help to avoid collisions and represent the first step towards
Design and evaluate vehicle architectures to reach the best trade-off between performance, range and comfort. Unrestricted.
 Design and evaluate vehicle architectures to reach the best trade-off between performance, range and comfort. Unrestricted. Introduction Presenter Thomas Desbarats Business Development Simcenter System
Design and evaluate vehicle architectures to reach the best trade-off between performance, range and comfort. Unrestricted. Introduction Presenter Thomas Desbarats Business Development Simcenter System
Új technológiák a közlekedésbiztonság jövőjéért
 Új technológiák a közlekedésbiztonság jövőjéért Dr. Szászi István Occupant Safety Robert Bosch Kft. 1 Outline 1. Active and Passive Safety - definition 2. Driver Information Functions 3. Driver Assistance
Új technológiák a közlekedésbiztonság jövőjéért Dr. Szászi István Occupant Safety Robert Bosch Kft. 1 Outline 1. Active and Passive Safety - definition 2. Driver Information Functions 3. Driver Assistance
Assisted and Automated Driving DEFINITION AND ASSESSMENT: SUMMARY DOCUMENT
 Assisted and Automated Driving DEFINITION AND ASSESSMENT: SUMMARY DOCUMENT Introduction Automated Driving is expected to bring huge societal benefits, including a reduction in road casualties, as well
Assisted and Automated Driving DEFINITION AND ASSESSMENT: SUMMARY DOCUMENT Introduction Automated Driving is expected to bring huge societal benefits, including a reduction in road casualties, as well
CSE 352: Self-Driving Cars. Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark
 CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
Successful focal points of the. Industry. Dutch Automotive. LEO KUSTERS AutomotiveNL Leo Kusters
 Successful focal points of the Dutch Automotive Industry LEO KUSTERS AutomotiveNL WHEN WAS THIS? AND THIS? FACTS AND FIGURES Turnover EUR 20 billion 5% growth 45,000 automotive employees Trucks, buses
Successful focal points of the Dutch Automotive Industry LEO KUSTERS AutomotiveNL WHEN WAS THIS? AND THIS? FACTS AND FIGURES Turnover EUR 20 billion 5% growth 45,000 automotive employees Trucks, buses
Functional Safety Analysis of Automated Vehicle Lane Centering Control Systems. Volpe The National Transportation Systems Center
 Functional Safety Analysis of Automated Vehicle Lane Centering Control Systems John Brewer and Wassim Najm Volpe National Transportation Systems Center July 22, 2015 Volpe The National Transportation Systems
Functional Safety Analysis of Automated Vehicle Lane Centering Control Systems John Brewer and Wassim Najm Volpe National Transportation Systems Center July 22, 2015 Volpe The National Transportation Systems
Software Driving License
 What if technology takes over all driving tasks? Software Driving License Gerben Feddes RDW & Jorrit Kuipers robottuner Intertraffic 2018 22-03-2017 Amsterdam Agenda 1. Software Driving License 2. ISO
What if technology takes over all driving tasks? Software Driving License Gerben Feddes RDW & Jorrit Kuipers robottuner Intertraffic 2018 22-03-2017 Amsterdam Agenda 1. Software Driving License 2. ISO
Intelligent Mobility for Smart Cities
 Intelligent Mobility for Smart Cities A/Prof Hussein Dia Centre for Sustainable Infrastructure CRICOS Provider 00111D @HusseinDia Outline Explore the complexity of urban mobility and how the convergence
Intelligent Mobility for Smart Cities A/Prof Hussein Dia Centre for Sustainable Infrastructure CRICOS Provider 00111D @HusseinDia Outline Explore the complexity of urban mobility and how the convergence
COLLISION AVOIDANCE SYSTEM
 COLLISION AVOIDANCE SYSTEM PROTECT YOUR FLEET AND YOUR BOTTOM LINE WITH MOBILEYE. Our Vision. Your Safety. TM Mobileye. The World Leader In Collision Avoidance Systems. The road ahead can have many unforeseen
COLLISION AVOIDANCE SYSTEM PROTECT YOUR FLEET AND YOUR BOTTOM LINE WITH MOBILEYE. Our Vision. Your Safety. TM Mobileye. The World Leader In Collision Avoidance Systems. The road ahead can have many unforeseen
IMPACT OF AUTOMATED HIGHWAY SYSTEMS ON INTELLIGENT TRANSPORTATION SYSTEMS RESEARCH.
 IMPACT OF AUTOMATED HIGHWAY SYSTEMS ON INTELLIGENT TRANSPORTATION SYSTEMS RESEARCH. Submitted by NIKHIL MENON (B060496CE) Guide Dr.K.Krishnamurthy (CED) CONTENTS TIMELINE of AHS Chronological Developments.
IMPACT OF AUTOMATED HIGHWAY SYSTEMS ON INTELLIGENT TRANSPORTATION SYSTEMS RESEARCH. Submitted by NIKHIL MENON (B060496CE) Guide Dr.K.Krishnamurthy (CED) CONTENTS TIMELINE of AHS Chronological Developments.
An Introduction to Automated Vehicles
 An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
Near-Term Automation Issues: Use Cases and Standards Needs
 Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
Procedure for assessing the performance of Autonomous Emergency Braking (AEB) systems in front-to-rear collisions
 systems in front-to-rear collisions") Procedure for assessing the performance of Autonomous Emergency Braking (AEB) systems in front-to-rear collisions Version 1.3 October 2014 CONTENTS 1 AIM... 3 2 SCOPE... 3 3 BACKGROUND AND RATIONALE...
Procedure for assessing the performance of Autonomous Emergency Braking (AEB) systems in front-to-rear collisions Version 1.3 October 2014 CONTENTS 1 AIM... 3 2 SCOPE... 3 3 BACKGROUND AND RATIONALE...
ITS deployment for connected vehicles and people
 Session 1: Global ITS update ITS deployment for connected vehicles and people June 27, 2013 Hajime AMANO President, ITS Japan 2 CACS(1973~1979) CACS: The Comprehensive Automobile Traffic Control System
Session 1: Global ITS update ITS deployment for connected vehicles and people June 27, 2013 Hajime AMANO President, ITS Japan 2 CACS(1973~1979) CACS: The Comprehensive Automobile Traffic Control System
Connected and Automated Vehicle Activities in the United States
 U.S. Department of Transportation Connected and Automated Vehicle Activities in the United States SIP-adus Workshop on Connected and Automated Driving Systems Kevin Dopart Automation Program Manager, U.S.
U.S. Department of Transportation Connected and Automated Vehicle Activities in the United States SIP-adus Workshop on Connected and Automated Driving Systems Kevin Dopart Automation Program Manager, U.S.
Intelligent Transportation Systems. Secure solutions for smart roads and connected highways. Brochure Intelligent Transportation Systems
 Intelligent Transportation Systems Secure solutions for smart roads and connected highways Secure solutions for smart roads and connected highways Today s technology is delivering new opportunities for
Intelligent Transportation Systems Secure solutions for smart roads and connected highways Secure solutions for smart roads and connected highways Today s technology is delivering new opportunities for
ZF Mitigates Rear-End Collisions with New Electronic Safety Assistant for Trucks
 Page 1/6, 2016-06-29 ZF Mitigates Rear-End Collisions with New Electronic Safety Assistant for Trucks The Evasive Maneuver Assist (EMA), developed with project partner WABCO, automatically steers tractor-trailers
Page 1/6, 2016-06-29 ZF Mitigates Rear-End Collisions with New Electronic Safety Assistant for Trucks The Evasive Maneuver Assist (EMA), developed with project partner WABCO, automatically steers tractor-trailers
Real World Test Drive OICA views
 Submitted by the experts of OICA TFAV-SG2-01-02 Real World Test Drive OICA views 2018-06-05, Den Haag, TF AutoVeh, 1 st meeting of the subgroup Real World Test Drive Submitted by the experts of OICA Dr.
Submitted by the experts of OICA TFAV-SG2-01-02 Real World Test Drive OICA views 2018-06-05, Den Haag, TF AutoVeh, 1 st meeting of the subgroup Real World Test Drive Submitted by the experts of OICA Dr.
EPSRC-JLR Workshop 9th December 2014 TOWARDS AUTONOMY SMART AND CONNECTED CONTROL
 EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
ACTIVE SAFETY 3.0. Prof. Kompaß, VP Fahrzeugsicherheit, 14. April 2016
 ACTIVE SAFETY 3.0 Prof. Kompaß, VP Fahrzeugsicherheit, 14. April 2016 THE NEW BMW 7 SERIES DRIVER ASSISTANCE PROVIDES COMFORT AND SAFETY AT THE HIGHEST LEVEL. Crossing traffic warning rear / front Lane
ACTIVE SAFETY 3.0 Prof. Kompaß, VP Fahrzeugsicherheit, 14. April 2016 THE NEW BMW 7 SERIES DRIVER ASSISTANCE PROVIDES COMFORT AND SAFETY AT THE HIGHEST LEVEL. Crossing traffic warning rear / front Lane
DYNA4 Open Simulation Framework with Flexible Support for Your Work Processes and Modular Simulation Model Library
 Open Simulation Framework with Flexible Support for Your Work Processes and Modular Simulation Model Library DYNA4 Concept DYNA4 is an open and modular simulation framework for efficient working with simulation
Open Simulation Framework with Flexible Support for Your Work Processes and Modular Simulation Model Library DYNA4 Concept DYNA4 is an open and modular simulation framework for efficient working with simulation
AND CHANGES IN URBAN MOBILITY PATTERNS
 TECHNOLOGY-ENABLED MOBILITY: Virtual TEsting of Autonomous Vehicles AND CHANGES IN URBAN MOBILITY PATTERNS Technology-Enabled Mobility In the era of the digital revolution everything is inter-connected.
TECHNOLOGY-ENABLED MOBILITY: Virtual TEsting of Autonomous Vehicles AND CHANGES IN URBAN MOBILITY PATTERNS Technology-Enabled Mobility In the era of the digital revolution everything is inter-connected.
PSA Peugeot Citroën Driving Automation and Connectivity
 PSA Peugeot Citroën Driving Automation and Connectivity June 2015 Automation Driver Levels of Automated Driving Driver continuously performs the longitudinal and lateral dynamic driving task Driver continuously
PSA Peugeot Citroën Driving Automation and Connectivity June 2015 Automation Driver Levels of Automated Driving Driver continuously performs the longitudinal and lateral dynamic driving task Driver continuously
On the role of AI in autonomous driving: prospects and challenges
 On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
Connected Vehicles. V2X technology.
 EN Kapsch TrafficCom Connected Vehicles. V2X technology. Cooperative Intelligent Transportation Systems (C-ITS) are based on the communication between vehicles and infrastructure (V2I, or vehicle to infrastructure
EN Kapsch TrafficCom Connected Vehicles. V2X technology. Cooperative Intelligent Transportation Systems (C-ITS) are based on the communication between vehicles and infrastructure (V2I, or vehicle to infrastructure
18th ICTCT Workshop, Helsinki, October Technical feasibility of safety related driving assistance systems
 18th ICTCT Workshop, Helsinki, 27-28 October 2005 Technical feasibility of safety related driving assistance systems Meng Lu Radboud University Nijmegen, The Netherlands, m.lu@fm.ru.nl Kees Wevers NAVTEQ,
18th ICTCT Workshop, Helsinki, 27-28 October 2005 Technical feasibility of safety related driving assistance systems Meng Lu Radboud University Nijmegen, The Netherlands, m.lu@fm.ru.nl Kees Wevers NAVTEQ,
Motorcycles in connected traffic - a contribution to safety
 Motorcycles in connected traffic - a contribution to safety Hennes Fischer, Yamaha Motor N.V., Netherlands Oliver Kohlinger, Honda R&D Europe GmbH, Germany 11 th International Motorcycle Conference Cologne,
Motorcycles in connected traffic - a contribution to safety Hennes Fischer, Yamaha Motor N.V., Netherlands Oliver Kohlinger, Honda R&D Europe GmbH, Germany 11 th International Motorcycle Conference Cologne,
AUTOMATION PILOTS ON PUBLIC ROADS IN THE NETHERLANDS. Maurice Kwakkernaat Program Manager Automated Driving
 AUTOMATION PILOTS ON PUBLIC ROADS IN THE NETHERLANDS Maurice Kwakkernaat Program Manager Automated Driving PROJECTS Udrive: Large Scale Naturalistic Driving Observations in Europe MRE Pre-automated Driving:
AUTOMATION PILOTS ON PUBLIC ROADS IN THE NETHERLANDS Maurice Kwakkernaat Program Manager Automated Driving PROJECTS Udrive: Large Scale Naturalistic Driving Observations in Europe MRE Pre-automated Driving:
State of the art in autonomous driving. German Aerospace Center DLR Institute of transportation systems
 DLR.de Chart 1 State of the art in autonomous driving German Aerospace Center DLR Institute of transportation systems Smart Cities Symposium Prague 2017 Dr.-Ing. Reza Dariani DLR.de Chart 2 DLR at a glance
DLR.de Chart 1 State of the art in autonomous driving German Aerospace Center DLR Institute of transportation systems Smart Cities Symposium Prague 2017 Dr.-Ing. Reza Dariani DLR.de Chart 2 DLR at a glance
Automated Driving: The Technology and Implications for Insurance Brake Webinar 6 th December 2016
 Automated Driving: The Technology and Implications for Insurance Brake Webinar 6 th December 2016 Andrew Miller Chief Technical Officer Chairman of the Board and President The Story So Far: Advanced Driver
Automated Driving: The Technology and Implications for Insurance Brake Webinar 6 th December 2016 Andrew Miller Chief Technical Officer Chairman of the Board and President The Story So Far: Advanced Driver
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
Braking Performance Improvement Method for V2V Communication-Based Autonomous Emergency Braking at Intersections
 , pp.20-25 http://dx.doi.org/10.14257/astl.2015.86.05 Braking Performance Improvement Method for V2V Communication-Based Autonomous Emergency Braking at Intersections Sangduck Jeon 1, Gyoungeun Kim 1,
, pp.20-25 http://dx.doi.org/10.14257/astl.2015.86.05 Braking Performance Improvement Method for V2V Communication-Based Autonomous Emergency Braking at Intersections Sangduck Jeon 1, Gyoungeun Kim 1,
On the road to automated vehicles Sensors pave the way!
 On the road to automated vehicles Sensors pave the way! 26B connected devices 250M connected vehicles by 2020 Ottomatika http://www.cmu.edu/news/stories/archives/2015/august/spinoff-acquired.html
On the road to automated vehicles Sensors pave the way! 26B connected devices 250M connected vehicles by 2020 Ottomatika http://www.cmu.edu/news/stories/archives/2015/august/spinoff-acquired.html
Pedalling into a driverless world: opportunities and threats
 John Parkin Professor of Transport Engineering John.parkin@uwe.ac.uk Pedalling into a driverless world: opportunities and threats International Cycling Conference, Mannheim 19 th to 21 st September 2017
John Parkin Professor of Transport Engineering John.parkin@uwe.ac.uk Pedalling into a driverless world: opportunities and threats International Cycling Conference, Mannheim 19 th to 21 st September 2017
Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications
 Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications Jiaqi Ma Assistant Professor University of Cincinnati ITS Midwest Annual Meeting Columbus, Ohio, September 29, 2017 Outline
Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications Jiaqi Ma Assistant Professor University of Cincinnati ITS Midwest Annual Meeting Columbus, Ohio, September 29, 2017 Outline
Intuitive Driving: Are We There Yet? Amine Taleb, Ph.D. February 2014 I 1
 Intuitive Driving: Are We There Yet? Amine Taleb, Ph.D. February 2014 I 1 February 2014 Outline Motivation Towards Connected/Automated Driving Valeo s Technologies and Perspective Automated Driving Connected
Intuitive Driving: Are We There Yet? Amine Taleb, Ph.D. February 2014 I 1 February 2014 Outline Motivation Towards Connected/Automated Driving Valeo s Technologies and Perspective Automated Driving Connected
Press Information. Volvo Car Group. Originator Malin Persson, Date of Issue
 Volvo Car Group Public Affairs PVH50 SE-405 31 Göteborg, Sweden Telephone +46 31 59 65 25 Fax +46 31 54 40 64 www.media.volvocars.com Press Information Originator Malin Persson, malin.persson@volvocars.com
Volvo Car Group Public Affairs PVH50 SE-405 31 Göteborg, Sweden Telephone +46 31 59 65 25 Fax +46 31 54 40 64 www.media.volvocars.com Press Information Originator Malin Persson, malin.persson@volvocars.com
Convergence: Connected and Automated Mobility
 Convergence: Connected and Automated Mobility Peter Sweatman Principal, CAVita LLC, Anaheim CA AASHTO CTE Denver June 19, 2018 1 Agenda New technology in mobility: CV, AV and CAV The transformational dynamic
Convergence: Connected and Automated Mobility Peter Sweatman Principal, CAVita LLC, Anaheim CA AASHTO CTE Denver June 19, 2018 1 Agenda New technology in mobility: CV, AV and CAV The transformational dynamic
Our Approach to Automated Driving System Safety. February 2019
 Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
The intelligent Truck safe, autonomous, connected. N. Mustafa Üstertuna Mercedes-Benz Türk A.Ş.
 The intelligent Truck safe, autonomous, connected N. Mustafa Üstertuna Mercedes-Benz Türk A.Ş. Challenges in the transportation industry Accidents Short Delivery Times On-Highway Traffic Urban Pollution
The intelligent Truck safe, autonomous, connected N. Mustafa Üstertuna Mercedes-Benz Türk A.Ş. Challenges in the transportation industry Accidents Short Delivery Times On-Highway Traffic Urban Pollution
Connected Vehicles. The rise of safety innovations and intelligent mobility
 Connected Vehicles The rise of safety innovations and intelligent mobility 1 Global Trends Growing world population Between now and 2050 the global population is expected to increase from 6.9 billion to
Connected Vehicles The rise of safety innovations and intelligent mobility 1 Global Trends Growing world population Between now and 2050 the global population is expected to increase from 6.9 billion to
SAFERIDER Project FP SAFERIDER Andrea Borin November 5th, 2010 Final Event & Demonstration Leicester, UK
 SAFERIDER Project FP7-216355 SAFERIDER Advanced Rider Assistance Systems Andrea Borin andrea.borin@ymre.yamaha-motor.it ARAS: Advanced Rider Assistance Systems Speed Alert Curve Frontal Collision Intersection
SAFERIDER Project FP7-216355 SAFERIDER Advanced Rider Assistance Systems Andrea Borin andrea.borin@ymre.yamaha-motor.it ARAS: Advanced Rider Assistance Systems Speed Alert Curve Frontal Collision Intersection
What is the potential of driver assistance technologies to reduce the number of road accidents?
 What is the potential of driver assistance technologies to reduce the number of road accidents? Stakeholders meeting on vehicle technologies to enhance road safety Brussels, 8 of March 2013 Thomas Lich,
What is the potential of driver assistance technologies to reduce the number of road accidents? Stakeholders meeting on vehicle technologies to enhance road safety Brussels, 8 of March 2013 Thomas Lich,
Active Safety and Cooperative Systems in the Road Infrastructure of the Future
 Active Safety and Cooperative Systems in the Road Infrastructure of the Future Centre for Research and Technology Hellas, Hellenic Institute of Transport Web: www.hit.certh.gr Athens 1 st of March 2011
Active Safety and Cooperative Systems in the Road Infrastructure of the Future Centre for Research and Technology Hellas, Hellenic Institute of Transport Web: www.hit.certh.gr Athens 1 st of March 2011
ADVANCED EMERGENCY BRAKING SYSTEM (AEBS) DISCLAIMER
 DISCLAIMER") ADVANCED EMERGENCY BRAKING SYSTEM (AEBS) DISCLAIMER OnGuardACTIVETM Disclaimer WABCO s advanced emergency braking system (AEBS) with active braking on moving, stopping and stationary vehicles OnGuardACTIVE
ADVANCED EMERGENCY BRAKING SYSTEM (AEBS) DISCLAIMER OnGuardACTIVETM Disclaimer WABCO s advanced emergency braking system (AEBS) with active braking on moving, stopping and stationary vehicles OnGuardACTIVE
IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017
 IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017 AUTOMATED DRIVING OPENS NEW OPPORTUNITIES FOR CUSTOMERS AND COMMUNITY. MORE SAFETY MORE COMFORT MORE FLEXIBILITY MORE
IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017 AUTOMATED DRIVING OPENS NEW OPPORTUNITIES FOR CUSTOMERS AND COMMUNITY. MORE SAFETY MORE COMFORT MORE FLEXIBILITY MORE
REDUCING THE OCCURRENCES AND IMPACT OF FREIGHT TRAIN DERAILMENTS
 REDUCING THE OCCURRENCES AND IMPACT OF FREIGHT TRAIN DERAILMENTS D-Rail Final Workshop 12 th November - Stockholm Monitoring and supervision concepts and techniques for derailments investigation Antonella
REDUCING THE OCCURRENCES AND IMPACT OF FREIGHT TRAIN DERAILMENTS D-Rail Final Workshop 12 th November - Stockholm Monitoring and supervision concepts and techniques for derailments investigation Antonella
REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE. Alex Haag Munich,
 REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE Alex Haag Munich, 10.10.2017 10/9/17 Regulatory Approval of an AI-based Autonomous Vehicle 2 1 INTRO Autonomous Intelligent Driving, GmbH Launched
REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE Alex Haag Munich, 10.10.2017 10/9/17 Regulatory Approval of an AI-based Autonomous Vehicle 2 1 INTRO Autonomous Intelligent Driving, GmbH Launched
GOVERNMENT STATUS REPORT OF JAPAN
 GOVERNMENT STATUS REPORT OF JAPAN Hidenobu KUBOTA Director, Policy Planning Office for Automated Driving Technology, Engineering Policy Division, Road Transport Bureau, Ministry of Land, Infrastructure,
GOVERNMENT STATUS REPORT OF JAPAN Hidenobu KUBOTA Director, Policy Planning Office for Automated Driving Technology, Engineering Policy Division, Road Transport Bureau, Ministry of Land, Infrastructure,
ecomove EfficientDynamics Approach to Sustainable CO2 Reduction
 ecomove EfficientDynamics Approach to Sustainable CO2 Reduction Jan Loewenau 1, Pei-Shih Dennis Huang 1, Geert Schmitz 2, Henrik Wigermo 2 1 BMW Group Forschung und Technik, Hanauer Str. 46, 80992 Munich,
ecomove EfficientDynamics Approach to Sustainable CO2 Reduction Jan Loewenau 1, Pei-Shih Dennis Huang 1, Geert Schmitz 2, Henrik Wigermo 2 1 BMW Group Forschung und Technik, Hanauer Str. 46, 80992 Munich,