Experimental Validation of Stable Obstacle Climbing with a Four-Wheel Mobile Robot OpenWHEEL
|
|
|
- Vernon Clark
- 5 years ago
- Views:
Transcription






1 al Validation of Stable Obstacle with a Four-Wheel Mobile Robot OpenWHEEL i3r Jean-Christophe.Fauroux@ifma.fr Belhassen-Chedli.Bouzgarrou@ifma.fr Frederic.Chapelle@ifma.fr Clermont-Ferrand, France LaMI UBP IFMA TIMS Mechanical Engineering Research Group Blaise Pascal University French Institute for Advanced Mechanics Research Federation 1



2 More agile mobile robots needed in the future Spatial exploration Mars exploration robot A rover for sample analysis Challenging usual applications Wheeled ATVs are blocked on ground discontinuities Wheelchair blocked before an obstacle 2






3 One big machine Agriculture A fleet of agile robots Rescue Fleet of robots to avoid soil compaction Earthquake Mag. 7.4 Turkey (1999) Scanning the streets and buildings Beach cleaning uses big machines or manual cleaning Beach pollution Towed filtering machine Manual cleaning 3
4 This work is about: Wheeled robots That climb step obstacles With only four wheels And stable behaviour Within the OpenWHEEL framework Wireless connection A3 Rear S 32 S 31 Wheel W31 A2 I2 S 21 W21 Double wishbone W22 Innovative suspension S 11 W11 S 12 A1 I1 W12 Camera S22 Suspension mechanism Saw Swing arm CAN Bus W 32 n Fro t Z X Y Inter-axle mechanism Ia Serial Parallel Innovative mechanism mechanism mechanism 4
5 Agile mobile robots Terrestrial locomotion system - unilateral / bilateral - slipping / sticking - can change in nature and number Terrestrial vehicles & robots Poly-articulated mechanical system Interact with environment Contacts with the ground Wheeled vehicles prevail (energetic efficiency?) Blocked on slope discontinuities of the ground Legs / Tracks regain interest for climbing Interface with the ground Crawler + multiples contacts, can cross obstacles & rough terrain - require high energy, moderate speed, complex control Leg + can cross obstacles and go fast on rough terrain - contact discontinuity, energy cost, stability control Wheel + fast on smooth surface, energy efficient - cannot climb obstacles or run on rough terrain Track + permanent stability, high traction - high friction energy loss, particularly during steering 5


 Biped with")


 www.")

6 Mobile robots based on legs Bi / Quadri / Hexa / Octo Natural gait / self-teaching Legs with feet = wheels Yanboo III (13kg,0.7m high) Biped with suction/rolling effectors Legs are manipulators www-robot.mes.titech.ac.jp Leg Wheel Hybrid Big Dog (75kg, 1m long, 6km/h, 35 slopes, 150kg payload) Roller-Walker (24kg, 0.5m long) Convertible wheels / Dual locomotion mode: walking / roller-skating www-robot.mes.titech.ac.jp 6


7 Wheeled robots Wheel: energy efficient even when steering Only exception : skid steering Leg Wheel Hybrid Pioneer P3-AT Skid steering simple robot Nomad Dual Ackermann steering strategy 7


8 Adaptative Wheeled Robots Minimally actuated frame, energy efficiency Simple control Leg Wheel Hybrid Micro5 abilities via 5 wheels Rocky 7 Adaptative rocker-bogie structure www-robotics.jpl.nasa.gov 8




9 Adaptative Wheeled Robots Crab I Adaptative parallel bogies Obstacle climbing abilities Leg Wheel Hybrid Shrimp 6 wheels on 2 // bogies and 1 front linkage 9






10 Hybrid multi-mode robots Highly actuated frame Orientable tracks for special modes of displacement Leg Wheel Hybrid Azimut 4 orientable tracks Helios VII 2 articulated tracks + 1 manipulating arm with hybrid grip/wheel end effector www-robot.mes.titech.ac.jp 10



 4 wheels on 3DOF legs www.robot.")
11 Hybrid multi-mode robots Leg Wheel Hybrid Highly actuated frame Displacement modes: peristaltic crossing, obstacle climbing RobuROC 6 (150 kg, 1.5m long) 3 tiltable axles with passive warping Able to turn on itself Can climb obstacles Hylos (0.5m long) 4 wheels on 3DOF legs Lama Peristaltic crossing of sandy areas 11
12 Chosen locomotion modes for OpenWHEEL Chosen architecture OpenWHEEL OW i3r Stability Rolling step obstacles Multi-modes Only four wheels Hybrid robot Two locomotion modes (at least) Wheels (efficiency) On legs (climbing ability) No existing robot that climb with only four wheels A challenge for stability during climbing Easier to transfer on real vehicles Few actuators Actuated wheels Few actuators in legs/frame for better simplicity / stiffness / consumption / price 12
13 OpenWHEEL i3r i3r = 3R inter-axle mechanism 2 passive R joints in the middle of the axles 1 actuated R joint for central warping Kinematic structure with double symmetry OpenWHEEL i3r A big central actuator for warping Passive joint Axle steering without robot motion OpenWHEEL OW i3r Stability ar e R W21 W22 nt o r F W11 W12 Four actuated wheels More space for payload 13
14 Stability criterion on 3 wheels 2D modelling when lifting one wheel Wheel W12 (front-left) Wheel W21 (rear-right) 1) 2) 3) Front axle steering Wheel W11 (front-right) W12 4) W11 G G G OW i3r Stability 5) Rear axle steering OpenWHEEL W22 G W21 Wheel W22 (rear-left) W11 G 6) W12 7) G 8) G G W21 W22 Stable Unstable Stable Unstable Stability if the lifted wheel is inside the turn 14
15 Stability during climbing 3D modelling Stability margin on 3 wheels when climbing = HG' W12 Exploring wheel Obstacle G1 R0 W11 OpenWHEEL OW i3r Stability R1 G W22 R2 P21 P12 H G' G2 W21 P22 15
16 process sequence in 7 phases / 19 stages 1 A - Prepairing W22 Low 2 W12 B - W 11 climbing C - W 12 climbing E - W 21 climbing High W21 W11 6 OpenWHEEL OW i3r Stability 10 D Going forward 15 F - W 22 climbing G - 16
17 process Strong simplifying hypotheses Negligible mass of the inter-axle mechanism Non-deformable bodies (i.e. infinite part stiffness) Small warping rotation-angles to avoid representation of complex 3D poses Punctual ground-wheel contact with toric wheels Perfect rolling without slipping assuming that normal forces are sufficient to ensure enough traction OpenWHEEL OW i3r Stability Incremental validation Multi-body Adams model [IROS 06] Reduced model [MTM 2008] Full scale model [in process...] 17

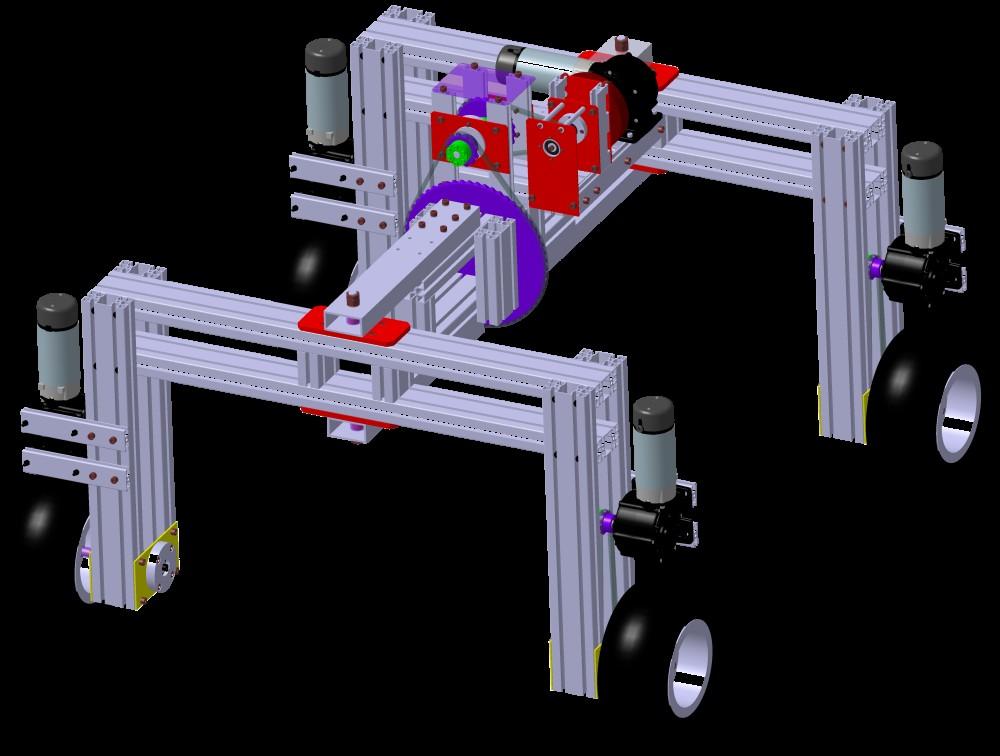
18 Wheel sub-assembly Four identical wheel sub-assemblies One 9V actuator : 200 rpm, 3.52 N.cm on top of the wheel Transmission ratio 1/15 Rubber air-tire with good friction (Diam 49.6 mm) Overconstrained structure - mass 149 g 2 Z40 Z8 3 C Wheel Inter-axle Whole robot E 0 Z8 Software Z

19 Inter-axle mechanism High torque warping mechanism The same 9V actuator as for the wheels Transmission ratio 1/560 Double worm gear redundant overconstrained transmission Minimized backlash Improved tooth strength Z16 Wheel Inter-axle Whole robot F1 Z16 Z8 E F2 Z8 Software Z56 Z40 19
 170 mm G1 Carries its power (12 AA batteries) G G2 W12")
20 Whole reduced model of the robot Whole assembly = 2 axles + 1 inter-axle mechanism Total weight 1430 g Center of mass quasicentered G1 G=0.497 G1 G2 Wheel Inter-axle Whole robot Software Translation speed 55mm/s Warping speed 45 in 21s (with oil) 170 mm G1 Carries its power (12 AA batteries) G G2 W m m W m m 20
; SendMessage (2); ClearMessage(); until")
21 Software architecture Embedded program in each control unit NQC language, BricxCC developing environment unit 1 for axle 1 (Master) unit 2 for axle 2 and warping joint R0 (Slave) Exchanges between units via infrared port Protocol by message sending and detection loop Master program for A1 Wheel Inter-axle Whole robot // Stage 2 : rev W22 / fwd W21 Bip(); SendMessage (2); ClearMessage(); until (Message() == 2); Slave program for A2+ R0 // Stage 2 : rev W22 / fwd W21 if (Message() == 2) { OnRev (W22); OnFwd (W21); Wait(150); Off (W22+W21); SendMessage(2); } Software 21

22 al climbing Purpose: validating the climbing strategy Obstacle: 55 mm high Higher than a wheel Actuators at full speed with open loop control Useful to determine the most suitable sensors Adjustments Improvement Difficulties Initial tests with stabilized power Final test with batteries Difficult to debug: the final pose depends on the full process 22

23 Phase A Stage 01 Adjustments Improvement 23
24 Phase B Stage 02 Adjustments Improvement 24
25 Phase B Stage 03 Adjustments Optional: going against the obstacle and actuating the wheel for bonus tangential force Improvement 25
26 Phase B Stage 04 Adjustments Improvement 26
27 Phase B Stage 05 Adjustments Optional: the exploring wheel can land faster if it was lifted just at the level of the obstacle Improvement 27
28 Phase C Stage 06 Adjustments With pitch angle and contact on four wheels, steering Axle A1 is coupled with warping the frame Improvement 28

29 Phase C Stage 07 Adjustments W11 serves as a pivot for Axle A1 Slipping risk on W11 Improvement Solution: unsteer slightly Axle A2 Slightly lifts W12 Increase normal force on W11 29
30 Phase C Stage 08 Adjustments Improvement 30
31 Phase C Stage 09 Adjustments Improvement 31
32 Phase D Stage 10 4W Stable W and W with same speed set point Normal forces differ Induced steering on axle A1 Adjustments Improvement Solution: closed-loop control - to equilibrate normal forces - to keep a constant steering angle 32

33 Phase E Stage 11 Adjustments Improvement 33
34 Phase E Stage 12 Solution: additional 149 g counterweight Risk of instability during W21 climbing Adjustments Improvement 34
35 Phase E Stage 13 Adjustments Improvement 35
36 Phase E Stage 14 Optional: the exploring wheel can land faster if it was lifted just at the Adjustments level of the obstacle Improvement 36
37 Phase F Stage 15 Optional: going against the Adjustments obstacle and actuating the wheel for bonus tangential force Improvement 37
38 Phase F Stage 16 Riskrobots of instability Agile during W22 climbing Solution: additional 149 g counterweight Adjustments Improvement 38

39 Phase F Stage 17 Adjustments Improvement 39
40 Phase F Stage 18 Adjustments Improvement 40
41 Phase G Stage 19 Adjustments Risk of lateral drift with respect to phase 1 Improvement 41
42 Design adjustments Axle A1 climbs more easily than Axle A2 Need for a counterweight The counterweight breaks longitudinal symmetry Possible explanation: if the centre of mass G is too high, its projection on the ground G' moves relatively to contact points Pi and stability criterion is no more respected G2 G G1 G G2 Adjustments Improvement G1 P1 P2 G' P1 P2 G' The 149 g counterweight brings G forward of 16 mm G1 G=m2 / m1 m2 G 1 G2=0.408 G1 G2 42
43 laws for the 4 wheels and central actuator Phases B-D-E-F are similar in length Warping phases take 80% of time. Warping angle < Phase E Angles of rotation of the actuators of OW i3r 600 Angle Angle Angle Angle Angle 500 Phase F W12 ( ) W11 ( ) W22 ( ) W21 ( ) R0 ( ) 400 Phase B Phase C Adjustments Improvement s 43
44 improvement The good metrics for measuring climbing ability Better control to improve climbing Adding sensors for precise monitoring Adjustments Not the wheel diameter Comparison Obstacle height / Altitude of the centre of mass OpenWHEEL i3r can climb obstacles as high as 67% ZG Angular coders on actuators (wheels + warping central joint) Coders on passive joints (axle steering) Ultra-sound sensor to detect obstacle / measure height Rolling without slipping Measuring normal force Pitch Two-axes force gauges in the rim of the wheels Improvement 44


45 Results A new principle for stable obstacle climbing Usable with only 4 wheels for simplicity Only one supplemental central actuator A climbing process in 19 stages Validated on a reduced model of OpenWHEEL i3r Climbs obstacles as high as 66% of ZCentre of mass In the future Geometrical model for coupled actuation of steering / warping Obstacle detection and control adaptation Normal force / slipping regulation Optimizing kinematics & structure Optimizing climbing strategy: how much can we climb with 4 wheels? 45
46 Next step? 06 A stable climbing process Multibody validation (Adams) al validation on actuated reduced model 46
47 Full scale demonstrator 140 kg, 1.4m long 47
OpenWHEEL i3r A new architecture for clearance performance
 LaMI Mechanical Engineering Research roup TIMS UBP IFMA Research Federation Blaise Pascal University Clermont-Ferrand II French Institute for Advanced Mechanics A new architecture for clearance performance
LaMI Mechanical Engineering Research roup TIMS UBP IFMA Research Federation Blaise Pascal University Clermont-Ferrand II French Institute for Advanced Mechanics A new architecture for clearance performance
A preliminary experimental study
 Jean-Christophe FAUROUX fauroux@ifma.fr Guillaume DOUARRE LaMI / IFMA / UBP Clermont-Ferrand, France Laboratoire de Mécanique & Ingénieries skid-steering on a 6x6 all-terrain vehicle A preliminary experimental
Jean-Christophe FAUROUX fauroux@ifma.fr Guillaume DOUARRE LaMI / IFMA / UBP Clermont-Ferrand, France Laboratoire de Mécanique & Ingénieries skid-steering on a 6x6 all-terrain vehicle A preliminary experimental
Synthesis of spatial parallel mechanisms for a vertical and longitudinal all-terrain suspension
 of spatial parallel mechanisms for a vertical and longitudinal all-terrain suspension Jean-Christophe.Fauroux@ifma.fr Clermont University French Institute for Advanced Mechanics (IFMA) EA3867, FR TIMS
of spatial parallel mechanisms for a vertical and longitudinal all-terrain suspension Jean-Christophe.Fauroux@ifma.fr Clermont University French Institute for Advanced Mechanics (IFMA) EA3867, FR TIMS
Last week we saw. Today: The Role of Locomotion : Robotics systems and science Lecture 4: Locomotion
 6.141: Robotics systems and science Lecture 4: Locomotion Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2009 Last week we saw Bang-bang control Open loop control Closed loop control: P, I, D Motors
6.141: Robotics systems and science Lecture 4: Locomotion Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2009 Last week we saw Bang-bang control Open loop control Closed loop control: P, I, D Motors
Introduction to Robotics
 Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Research Center Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7,
Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Research Center Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7,
DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN
 Ready 12th Symposium on Advance Space Technologies in Robotics and Automation, ESA / ESTEC, Noordwijk, The Nethelands DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN Shivesh Kumar, Raghavendra
Ready 12th Symposium on Advance Space Technologies in Robotics and Automation, ESA / ESTEC, Noordwijk, The Nethelands DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN Shivesh Kumar, Raghavendra
Wheeled Mobile Robots
 Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Chassis Concepts for the ExoMars Rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
Control of Mobile Robots
 Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
RIMRES: A project summary
 RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
Case Studies on NASA Mars Rover s Mobility System
 Case Studies on NASA Mars Rover s Mobility System Shih-Liang (Sid) Wang 1 Abstract Motion simulation files based on Working Model 2D TM are developed to simulate Mars rover s mobility system. The rover's
Case Studies on NASA Mars Rover s Mobility System Shih-Liang (Sid) Wang 1 Abstract Motion simulation files based on Working Model 2D TM are developed to simulate Mars rover s mobility system. The rover's
Linear Shaft Motors in Parallel Applications
 Linear Shaft Motors in Parallel Applications Nippon Pulse s Linear Shaft Motor (LSM) has been successfully used in parallel motor applications. Parallel applications are ones in which there are two or
Linear Shaft Motors in Parallel Applications Nippon Pulse s Linear Shaft Motor (LSM) has been successfully used in parallel motor applications. Parallel applications are ones in which there are two or
Wheeled Robotic Mobility. Dimi Apostolopoulos
 Wheeled Robotic Mobility Dimi Apostolopoulos Significance of Mobility Move Position Transport Employ instruments and tools React to work loads in a controllable fashion ROBOTIC MOBILITY Dimi Apostolopoulos
Wheeled Robotic Mobility Dimi Apostolopoulos Significance of Mobility Move Position Transport Employ instruments and tools React to work loads in a controllable fashion ROBOTIC MOBILITY Dimi Apostolopoulos
Torque steer effects resulting from tyre aligning torque Effect of kinematics and elastokinematics
 P refa c e Tyres of suspension and drive 1.1 General characteristics of wheel suspensions 1.2 Independent wheel suspensions- general 1.2.1 Requirements 1.2.2 Double wishbone suspensions 1.2.3 McPherson
P refa c e Tyres of suspension and drive 1.1 General characteristics of wheel suspensions 1.2 Independent wheel suspensions- general 1.2.1 Requirements 1.2.2 Double wishbone suspensions 1.2.3 McPherson
Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics.
 Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics. http://dx.doi.org/10.3991/ijoe.v11i6.5033 Matthew Bastin* and R Peter
Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics. http://dx.doi.org/10.3991/ijoe.v11i6.5033 Matthew Bastin* and R Peter
Arms, Legs, Wheels, Tracks and What Really Drives Them: Effectors and Actuators. By: J. Islam & Tiffany Stephenson
 Arms, Legs, Wheels, Tracks and What Really Drives Them: Effectors and Actuators By: J. Islam & Tiffany Stephenson Components That Enable A Robots Actions Effector: Device that makes impact/influence on
Arms, Legs, Wheels, Tracks and What Really Drives Them: Effectors and Actuators By: J. Islam & Tiffany Stephenson Components That Enable A Robots Actions Effector: Device that makes impact/influence on
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Boombot: Low Friction Coefficient Stair Climbing Robot Using Rotating Boom and Weight Redistribution
 Boombot: Low Friction Coefficient Stair Climbing Robot Using Rotating Boom and Weight Redistribution Sartaj Singh and Ramachandra K Abstract Boombot comprising four wheels and a rotating boom in the middle
Boombot: Low Friction Coefficient Stair Climbing Robot Using Rotating Boom and Weight Redistribution Sartaj Singh and Ramachandra K Abstract Boombot comprising four wheels and a rotating boom in the middle
Analysis and control of vehicle steering wheel angular vibrations
 Analysis and control of vehicle steering wheel angular vibrations T. LANDREAU - V. GILLET Auto Chassis International Chassis Engineering Department Summary : The steering wheel vibration is analyzed through
Analysis and control of vehicle steering wheel angular vibrations T. LANDREAU - V. GILLET Auto Chassis International Chassis Engineering Department Summary : The steering wheel vibration is analyzed through
TH627. Agile and effective
 TH627 Telehandler Agile and effective The TH627 is the optimum solution for lifting heights around 6 meters. It combines agile maneuverability with powerful performance and remains in a stable position
TH627 Telehandler Agile and effective The TH627 is the optimum solution for lifting heights around 6 meters. It combines agile maneuverability with powerful performance and remains in a stable position
Space Robotics Planetary Exploration - a DLR Perspective
 Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Lifting Mechanisms. Example 1: Two Stage Lift
 Lifting Mechanisms The primary scoring method for the 2018 game is to deposit fuel cubes into scoring zones. A manipulator fixed to your robot can deliver fuel cubes into ground level scoring zones, but
Lifting Mechanisms The primary scoring method for the 2018 game is to deposit fuel cubes into scoring zones. A manipulator fixed to your robot can deliver fuel cubes into ground level scoring zones, but
Innovative Mars exploration rover using inflatable or unfolding wheels
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE
 WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE Ilkka Leppänen, Sami Salmi and Aarne Halme Automation Technology Laboratory Helsinki University of Technology PL 3000, 02015 HUT, Finland E-mail
WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE Ilkka Leppänen, Sami Salmi and Aarne Halme Automation Technology Laboratory Helsinki University of Technology PL 3000, 02015 HUT, Finland E-mail
MODELS FOR THE DYNAMIC ANALYSIS OF THE SUSPENSION SYSTEM OF THE VEHICLES REAR AXLE
 MODELS FOR THE DYNAMIC ANALYSIS OF THE SUSPENSION SYSTEM OF THE VEHICLES REAR AXLE Alexandru Cătălin Transilvania University of Braşov, Product Design and Robotics Department, calex@unitbv.ro Keywords:
MODELS FOR THE DYNAMIC ANALYSIS OF THE SUSPENSION SYSTEM OF THE VEHICLES REAR AXLE Alexandru Cătălin Transilvania University of Braşov, Product Design and Robotics Department, calex@unitbv.ro Keywords:
Full Vehicle Durability Prediction Using Co-simulation Between Implicit & Explicit Finite Element Solvers
 Full Vehicle Durability Prediction Using Co-simulation Between Implicit & Explicit Finite Element Solvers SIMULIA Great Lakes Regional User Meeting Oct 12, 2011 Victor Oancea Member of SIMULIA CTO Office
Full Vehicle Durability Prediction Using Co-simulation Between Implicit & Explicit Finite Element Solvers SIMULIA Great Lakes Regional User Meeting Oct 12, 2011 Victor Oancea Member of SIMULIA CTO Office
REU: Improving Straight Line Travel in a Miniature Wheeled Robot
 THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
The Design of an Omnidirectional All-Terrain Rover Chassis
 The Design of an Omnidirectional All-Terrain Rover Chassis Abstract Submission for TePRA 2011: the 3rd Annual IEEE International Conference on Technologies for Practical Robot Applications Timothy C. Lexen,
The Design of an Omnidirectional All-Terrain Rover Chassis Abstract Submission for TePRA 2011: the 3rd Annual IEEE International Conference on Technologies for Practical Robot Applications Timothy C. Lexen,
Robot Arm with Conveyor Belts
 Robot Arm with Conveyor Belts This example models a robotic arm and two conveyor belts. One conveyor belts bring blocks to the robot. The robot grabs the block, flips it over and transfers it to another
Robot Arm with Conveyor Belts This example models a robotic arm and two conveyor belts. One conveyor belts bring blocks to the robot. The robot grabs the block, flips it over and transfers it to another
KINEMATICS OF REAR SUSPENSION SYSTEM FOR A BAJA ALL-TERRAIN VEHICLE.
 International Journal of Mechanical Engineering and Technology (IJMET) Volume 8, Issue 8, August 2017, pp. 164 171, Article ID: IJMET_08_08_019 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijmet&vtype=8&itype=8
International Journal of Mechanical Engineering and Technology (IJMET) Volume 8, Issue 8, August 2017, pp. 164 171, Article ID: IJMET_08_08_019 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijmet&vtype=8&itype=8
Rear Drive Axle and Differential
 Page 1 of 13 Rear Drive Axle and Differential GENERAL Item Part Number Description A - Electronic rear differential B - Open rear differential 1 - Rear driveshaft 2 - Electronic rear differential 3 - RH
Page 1 of 13 Rear Drive Axle and Differential GENERAL Item Part Number Description A - Electronic rear differential B - Open rear differential 1 - Rear driveshaft 2 - Electronic rear differential 3 - RH
Review of Various Steering Systems for Unmanned Ground Vehicle
 Review of Various Steering Systems for Unmanned Ground Vehicle Pratik Sharma 1, Nikita Sashte 2, Suraj Phadke³ U.G. Student, Department of Mechanical Engineering, Anantrao Pawar Engineering College, Parvati,
Review of Various Steering Systems for Unmanned Ground Vehicle Pratik Sharma 1, Nikita Sashte 2, Suraj Phadke³ U.G. Student, Department of Mechanical Engineering, Anantrao Pawar Engineering College, Parvati,
Hydraulic Pump and Track Motor for Hydrostatic Transmission
 KYB TECHNICAL REVIEW No. 55 OCT. 2017 Product Introduction Hydraulic Pump and Track Motor for Hydrostatic Transmission INADA Takanori, MIURA Takuya, MATSUZAKA Keita 1 Introduction 2 Hydraulic Pumps There
KYB TECHNICAL REVIEW No. 55 OCT. 2017 Product Introduction Hydraulic Pump and Track Motor for Hydrostatic Transmission INADA Takanori, MIURA Takuya, MATSUZAKA Keita 1 Introduction 2 Hydraulic Pumps There
Vehicle functional design from PSA in-house software to AMESim standard library with increased modularity
 Vehicle functional design from PSA in-house software to AMESim standard library with increased modularity Benoit PARMENTIER, Frederic MONNERIE (PSA) Marc ALIRAND, Julien LAGNIER (LMS) Vehicle Dynamics
Vehicle functional design from PSA in-house software to AMESim standard library with increased modularity Benoit PARMENTIER, Frederic MONNERIE (PSA) Marc ALIRAND, Julien LAGNIER (LMS) Vehicle Dynamics
Drive Essentials. robot. -Andy Baker
 Drive Essentials The best drive train is more important than anything else on the robot meets your strategy goals can be built with your resources rarely needs maintenance can be fixed within 4 minutes
Drive Essentials The best drive train is more important than anything else on the robot meets your strategy goals can be built with your resources rarely needs maintenance can be fixed within 4 minutes
An Innovative Space Rover with Extended Climbing Abilities T. Estier 1, Y. Crausaz 1, B. Merminod 1, M. Lauria 1, R. Piguet 1, R.
 An Innovative Space Rover with Extended Climbing Abilities T. Estier 1, Y. Crausaz 1, B. Merminod 1, M. Lauria 1, R. Piguet 1, R. Siegwart 1 Abstract Autonomous mobile robots have become a key technology
An Innovative Space Rover with Extended Climbing Abilities T. Estier 1, Y. Crausaz 1, B. Merminod 1, M. Lauria 1, R. Piguet 1, R. Siegwart 1 Abstract Autonomous mobile robots have become a key technology
SuperQuest Salem Drive Train Best Practices
 SuperQuest Salem Drive Train Best Practices Drive Trains Design Hints Compare different designs Look at examples from Worlds Tips for Drive Systems Always support drive shafts on two points (gears, sprockets,
SuperQuest Salem Drive Train Best Practices Drive Trains Design Hints Compare different designs Look at examples from Worlds Tips for Drive Systems Always support drive shafts on two points (gears, sprockets,
NIMA RASHVAND MODELLING & CRUISE CONTROL OF A MOBILE MACHINE WITH HYDROSTATIC POWER TRANSMISSION
 I NIMA RASHVAND MODELLING & CRUISE CONTROL OF A MOBILE MACHINE WITH HYDROSTATIC POWER TRANSMISSION MASTER OF SCIENCE THESIS Examiners: Professor Kalevi Huhtala Dr Reza Ghabcheloo The thesis is approved
I NIMA RASHVAND MODELLING & CRUISE CONTROL OF A MOBILE MACHINE WITH HYDROSTATIC POWER TRANSMISSION MASTER OF SCIENCE THESIS Examiners: Professor Kalevi Huhtala Dr Reza Ghabcheloo The thesis is approved
NEVER GET STUCK PIONEERING AWD SOLUTION
 NEVER GET STUCK PIONEERING AWD SOLUTION GO ANYWHERE WHATEVER THE WEATHER Customers have no other choice, but to opt for mechanical allwheel drive to improve the mobility of their trucks. This generates
NEVER GET STUCK PIONEERING AWD SOLUTION GO ANYWHERE WHATEVER THE WEATHER Customers have no other choice, but to opt for mechanical allwheel drive to improve the mobility of their trucks. This generates
Design of Mobility System for Ground Model of Planetary Exploration Rover
 Technical Paper J. Astron. Space Sci. 29(4), 413-422 (2012) Design of Mobility System for Ground Model of Planetary Exploration Rover Younkyu Kim 1, Wesub Eom 1, Joo-Hee Lee 1, 2, and Eun-Sup Sim 1 1 Aerospace
Technical Paper J. Astron. Space Sci. 29(4), 413-422 (2012) Design of Mobility System for Ground Model of Planetary Exploration Rover Younkyu Kim 1, Wesub Eom 1, Joo-Hee Lee 1, 2, and Eun-Sup Sim 1 1 Aerospace
Manipulators. Basic/Background Info Types of Manipulators General Manipulator design tips
 FTC Manipulators By: Zach Zakfeld (Enigma Robotics) Teams: FTC 5391, FTC 5385 and FRC 2075 *Some images in this presentation are of FRC robots so exact designs may not be applicable, however all of the
FTC Manipulators By: Zach Zakfeld (Enigma Robotics) Teams: FTC 5391, FTC 5385 and FRC 2075 *Some images in this presentation are of FRC robots so exact designs may not be applicable, however all of the
TH735. A small powerhouse, completely compact: TH735
 TH735 Telehandler A small powerhouse, completely compact: TH735 The Wacker Neuson TH735 is a compact powerhouse for demanding applications, even in the narrowest of spaces thanks to its low overall height
TH735 Telehandler A small powerhouse, completely compact: TH735 The Wacker Neuson TH735 is a compact powerhouse for demanding applications, even in the narrowest of spaces thanks to its low overall height
Benefit of Push-pull Locomotion for Planetary Rover Mobility
 Benefit of Push-pull Locomotion for Planetary Rover Mobility C. Creager 1, S. Moreland 2, K. Skonieczny 3, K. Johnson 4, V. Asnani 5, R. Gilligan 6 1 NASA Glenn Research Center, Mail Stop 23-3, 21000 Brookpark
Benefit of Push-pull Locomotion for Planetary Rover Mobility C. Creager 1, S. Moreland 2, K. Skonieczny 3, K. Johnson 4, V. Asnani 5, R. Gilligan 6 1 NASA Glenn Research Center, Mail Stop 23-3, 21000 Brookpark
Structure Design and Performance Analysis for Locomotion System of the Field Exploration Robot
 Structure Design and Performance Analysis for Locomotion System of the Field Exploration Robot SHANG WEIYAN QIU FAJU YANG CHAOZHEN ZHENGSHUHUA Department of mechanical engineering Ningbo University of
Structure Design and Performance Analysis for Locomotion System of the Field Exploration Robot SHANG WEIYAN QIU FAJU YANG CHAOZHEN ZHENGSHUHUA Department of mechanical engineering Ningbo University of
TH744. everything under control in one hand. Telehandler
 TH744 Telehandler everything under control in one hand The multifunctional joystick of the TH744 is a true all-rounder it controls 16 functions. Practical for night job sites: The joystick and all of the
TH744 Telehandler everything under control in one hand The multifunctional joystick of the TH744 is a true all-rounder it controls 16 functions. Practical for night job sites: The joystick and all of the
Multi-body Dynamical Modeling and Co-simulation of Active front Steering Vehicle
 The nd International Conference on Computer Application and System Modeling (01) Multi-body Dynamical Modeling and Co-simulation of Active front Steering Vehicle Feng Ying Zhang Qiao Dept. of Automotive
The nd International Conference on Computer Application and System Modeling (01) Multi-body Dynamical Modeling and Co-simulation of Active front Steering Vehicle Feng Ying Zhang Qiao Dept. of Automotive
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science
 Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Segway Robotic Mobility Platform (RMP) Specifications
 Specifications") Segway Robotic Mobility Platform (RMP) Specifications Proven Durability, Reliability, and Performance The Segway RMP takes the performance and engineering prowess demonstrated in the Segway Personal Transporter
Segway Robotic Mobility Platform (RMP) Specifications Proven Durability, Reliability, and Performance The Segway RMP takes the performance and engineering prowess demonstrated in the Segway Personal Transporter
Week 11. Module 5: EE100 Course Project Making your first robot
 Week 11 Module 5: EE100 Course Project Making your first robot Dr. Ing. Ahmad Kamal Nasir Office Hours: Room 9-245A Tuesday (1000-1100) Wednesday (1500-1600) Course Project: Wall-Follower Robot Week 1
Week 11 Module 5: EE100 Course Project Making your first robot Dr. Ing. Ahmad Kamal Nasir Office Hours: Room 9-245A Tuesday (1000-1100) Wednesday (1500-1600) Course Project: Wall-Follower Robot Week 1
Design and Optimization of a Mars Rover s Rocker-Bogie Mechanism
 IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 14, Issue 5 Ver. III (Sep. - Oct. 2017), PP 74-79 www.iosrjournals.org Design and Optimization of
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 14, Issue 5 Ver. III (Sep. - Oct. 2017), PP 74-79 www.iosrjournals.org Design and Optimization of
ISO 8379 INTERNATIONAL STANDARD. Rough terrain trucks Stability tests. Chariots élévateurs tous terrains à fourches Essais de stabillité
 INTERNATIONAL STANDARD ISO 8379 First edition 1998-07-01 Rough terrain trucks Stability tests Chariots élévateurs tous terrains à fourches Essais de stabillité A Reference number Provläsningsexemplar /
INTERNATIONAL STANDARD ISO 8379 First edition 1998-07-01 Rough terrain trucks Stability tests Chariots élévateurs tous terrains à fourches Essais de stabillité A Reference number Provläsningsexemplar /
How to Build with the Mindstorm Kit
 How to Build with the Mindstorm Kit There are many resources available Constructopedias Example Robots YouTube Etc. The best way to learn, is to do Remember rule #1: don't be afraid to fail New Rule: don't
How to Build with the Mindstorm Kit There are many resources available Constructopedias Example Robots YouTube Etc. The best way to learn, is to do Remember rule #1: don't be afraid to fail New Rule: don't
ARTICULATED LOADERS FULL LINE
 ARTICULATED LOADERS 140 240 340 440 540 FULL LINE In 1859, an agricultural implement company, housed in a blacksmith shop, was started in West Bend, Wisconsin, U.S.A. From these humble beginnings, the
ARTICULATED LOADERS 140 240 340 440 540 FULL LINE In 1859, an agricultural implement company, housed in a blacksmith shop, was started in West Bend, Wisconsin, U.S.A. From these humble beginnings, the
AN ELECTRICAL FUEL PUMPING AND METERING SYSTEM FOR MORE ELECTRICAL AERO-ENGINES
 25 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES AN ELECTRICAL FUEL PUMPING AND METERING SYSTEM FOR MORE ELECTRICAL AERO-ENGINES Jean-Yves ROUTEX HISPANO-SUIZA, SAFRAN GROUP Keywords: Fuel, pumping,
25 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES AN ELECTRICAL FUEL PUMPING AND METERING SYSTEM FOR MORE ELECTRICAL AERO-ENGINES Jean-Yves ROUTEX HISPANO-SUIZA, SAFRAN GROUP Keywords: Fuel, pumping,
Suspension systems and components
 Suspension systems and components 2of 42 Objectives To provide good ride and handling performance vertical compliance providing chassis isolation ensuring that the wheels follow the road profile very little
Suspension systems and components 2of 42 Objectives To provide good ride and handling performance vertical compliance providing chassis isolation ensuring that the wheels follow the road profile very little
Modelling and Simulation Specialists
 Modelling and Simulation Specialists Multi-Domain Simulation of Hybrid Vehicles Multiphysics Simulation for Autosport / Motorsport Applications Seminar UK Magnetics Society Claytex Services Limited Software,
Modelling and Simulation Specialists Multi-Domain Simulation of Hybrid Vehicles Multiphysics Simulation for Autosport / Motorsport Applications Seminar UK Magnetics Society Claytex Services Limited Software,
Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil
 Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil By Brian Edwards, Vehicle Dynamics Group, Pratt and Miller Engineering, USA 22 Engineering Reality Magazine Multibody Dynamics
Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil By Brian Edwards, Vehicle Dynamics Group, Pratt and Miller Engineering, USA 22 Engineering Reality Magazine Multibody Dynamics
MULTIBODY ANALYSIS OF THE M-346 PILOTS INCEPTORS MECHANICAL CIRCUITS INTRODUCTION
 MULTIBODY ANALYSIS OF THE M-346 PILOTS INCEPTORS MECHANICAL CIRCUITS Emanuele LEONI AERMACCHI Italy SAMCEF environment has been used to model and analyse the Pilots Inceptors (Stick/Pedals) mechanical
MULTIBODY ANALYSIS OF THE M-346 PILOTS INCEPTORS MECHANICAL CIRCUITS Emanuele LEONI AERMACCHI Italy SAMCEF environment has been used to model and analyse the Pilots Inceptors (Stick/Pedals) mechanical
SPMM OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000?
 SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
00/00/00 QUOTATION Nº: 000/00 VIBRATORY TANDEM ROLLER, MARK PACLITE MODEL VR1200X2
 00/00/00 QUOTATION Nº: 000/00 TO = VIBRATORY TANDEM ROLLER, MARK PACLITE MODEL VR1200X2 GENERAL CHARACTERISTICS:. Total mass, 2 600 kg. French Classification UNE 115-435 (PV3). Static linear load front
00/00/00 QUOTATION Nº: 000/00 TO = VIBRATORY TANDEM ROLLER, MARK PACLITE MODEL VR1200X2 GENERAL CHARACTERISTICS:. Total mass, 2 600 kg. French Classification UNE 115-435 (PV3). Static linear load front
Astro the Rover. Olympus Mons Rover Team
 Astro the Rover Olympus Mons Rover Team 2014-2015 Purpose: Design a robotic vehicle capable of performing tasks for a sample return mission within the parameters and requirements of the University Rover
Astro the Rover Olympus Mons Rover Team 2014-2015 Purpose: Design a robotic vehicle capable of performing tasks for a sample return mission within the parameters and requirements of the University Rover
Fluidic Stochastic Modular Robotics: Revisiting the System Design
 Fluidic Stochastic Modular Robotics: Revisiting the System Design Viktor Zykov Hod Lipson Computational Synthesis Cornell University Grand Challenges in the Area of Self-Reconfigurable Modular Robots Self-repair
Fluidic Stochastic Modular Robotics: Revisiting the System Design Viktor Zykov Hod Lipson Computational Synthesis Cornell University Grand Challenges in the Area of Self-Reconfigurable Modular Robots Self-repair
Vehicle Dynamic Simulation Using A Non-Linear Finite Element Simulation Program (LS-DYNA)
") Vehicle Dynamic Simulation Using A Non-Linear Finite Element Simulation Program (LS-DYNA) G. S. Choi and H. K. Min Kia Motors Technical Center 3-61 INTRODUCTION The reason manufacturers invest their time
Vehicle Dynamic Simulation Using A Non-Linear Finite Element Simulation Program (LS-DYNA) G. S. Choi and H. K. Min Kia Motors Technical Center 3-61 INTRODUCTION The reason manufacturers invest their time
MECH S Homework Concept Synthesis Due 12 Feb 14
 MECH 3200 14S Homework Concept Synthesis Due 12 Feb 14 Veterinary Prosthetics Consider a canine front double amputee (i.e., hind legs intact, but fore legs gone humerus removed from the scapula). The owners
MECH 3200 14S Homework Concept Synthesis Due 12 Feb 14 Veterinary Prosthetics Consider a canine front double amputee (i.e., hind legs intact, but fore legs gone humerus removed from the scapula). The owners
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE500-350HL Hexapods and Robotics HexGen HE500-350HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 110 mm and angular travels to 40 Precision design
HexGen HE500-350HL Hexapods and Robotics HexGen HE500-350HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 110 mm and angular travels to 40 Precision design
Hybrid Nanopositioning Systems with Piezo Actuators
 Hybrid Nanopositioning Systems with Piezo Actuators Long Travel Ranges, Heavy Loads, and Exact Positioning Physik Instrumente (PI) GmbH & Co. KG, Auf der Roemerstrasse 1, 76228 Karlsruhe, Germany Page
Hybrid Nanopositioning Systems with Piezo Actuators Long Travel Ranges, Heavy Loads, and Exact Positioning Physik Instrumente (PI) GmbH & Co. KG, Auf der Roemerstrasse 1, 76228 Karlsruhe, Germany Page
ParcelBot A Tracked Parcel Transporter with High Obstacle Negotiation Capabilities
 Research Collection Conference Paper ParcelBot A Tracked Parcel Transporter with High Obstacle Negotiation Capabilities Author(s): Hoepflinger, Mark H.; Baschung, David; Remy, C. D.; Hutter, Marco; Siegwart,
Research Collection Conference Paper ParcelBot A Tracked Parcel Transporter with High Obstacle Negotiation Capabilities Author(s): Hoepflinger, Mark H.; Baschung, David; Remy, C. D.; Hutter, Marco; Siegwart,
The electro-mechanical power steering with dual pinion
 Service Training Self-study programme 317 The electro-mechanical power steering with dual pinion Design and function The electro-mechanical power steering has many advantages over the hydraulic steering
Service Training Self-study programme 317 The electro-mechanical power steering with dual pinion Design and function The electro-mechanical power steering has many advantages over the hydraulic steering
Terrain Response TERRAIN RESPONSE TM
 Terrain Response TERRAIN RESPONSE TM The Terrain Response system is permanently active, continuously providing benefits in traction and driveability. These can be further enhanced for specific on and off-road
Terrain Response TERRAIN RESPONSE TM The Terrain Response system is permanently active, continuously providing benefits in traction and driveability. These can be further enhanced for specific on and off-road
Superiority in compact format
 The compact class 2020]2024]2028 2030]2030 S]2034 2336]2345 The SLT-class: Low style Loader 2024 SLT 2028 SLT 2030 SLT 2336 SLT 2345 SLT Superiority in compact format Yard-, Wheel- and Telescopic Loaders...
The compact class 2020]2024]2028 2030]2030 S]2034 2336]2345 The SLT-class: Low style Loader 2024 SLT 2028 SLT 2030 SLT 2336 SLT 2345 SLT Superiority in compact format Yard-, Wheel- and Telescopic Loaders...
Control of a Multi Function Wheelchair for Disabled/Elderly Mobility
 Control of a Multi Function Wheelchair for Disabled/Elderly Mobility Nor Maniha Abdul Ghani Dr. Osman Tokhi Department of Automatic Control and Systems Engineering The University of Sheffield Introduction/Problems
Control of a Multi Function Wheelchair for Disabled/Elderly Mobility Nor Maniha Abdul Ghani Dr. Osman Tokhi Department of Automatic Control and Systems Engineering The University of Sheffield Introduction/Problems
TSC INSPECTION SYSTEMS
 TSC INSPECTION SYSTEMS APPLICATIONS OF ACFM IN THE RAIL INDUSTRY ACFM was originally developed for use in the oil and gas industry as a technique for detecting and sizing surface-breaking defects with
TSC INSPECTION SYSTEMS APPLICATIONS OF ACFM IN THE RAIL INDUSTRY ACFM was originally developed for use in the oil and gas industry as a technique for detecting and sizing surface-breaking defects with
Research on Skid Control of Small Electric Vehicle (Effect of Velocity Prediction by Observer System)
") Proc. Schl. Eng. Tokai Univ., Ser. E (17) 15-1 Proc. Schl. Eng. Tokai Univ., Ser. E (17) - Research on Skid Control of Small Electric Vehicle (Effect of Prediction by Observer System) by Sean RITHY *1
Proc. Schl. Eng. Tokai Univ., Ser. E (17) 15-1 Proc. Schl. Eng. Tokai Univ., Ser. E (17) - Research on Skid Control of Small Electric Vehicle (Effect of Prediction by Observer System) by Sean RITHY *1
HOLDER S SERIES BENEFITS, FEATURES AND TECHNICAL DATA
 HOLDER S SERIES BENEFITS, FEATURES AND TECHNICAL DATA HOLDER S SERIES 3 ATTACHMENT AREAS For the flexible use of powerful attachments. 2 standardised attachment areas (front and rear lift) as well as 3rd
HOLDER S SERIES BENEFITS, FEATURES AND TECHNICAL DATA HOLDER S SERIES 3 ATTACHMENT AREAS For the flexible use of powerful attachments. 2 standardised attachment areas (front and rear lift) as well as 3rd
ALS (Active Lateral Suspension) By Bernard GAUTIER SNCF
 By Bernard GAUTIER SNCF") ALS (Active Lateral Suspension) By Bernard GAUTIER SNCF The vertical and lateral motions of a railway vehicle come from the track and the wheel - rail contact dynamics. The motions of the vehicle determinate
ALS (Active Lateral Suspension) By Bernard GAUTIER SNCF The vertical and lateral motions of a railway vehicle come from the track and the wheel - rail contact dynamics. The motions of the vehicle determinate
Chapter 1. Stair-Climber. Doug Carlson
 Chapter 1 Stair-Climber Doug Carlson 1 2 Chapter # Chapter Title Bill of Materials These are the parts you will need to build the Stair-Climber as shown. Introduction Stair-Climber is the latest in a series
Chapter 1 Stair-Climber Doug Carlson 1 2 Chapter # Chapter Title Bill of Materials These are the parts you will need to build the Stair-Climber as shown. Introduction Stair-Climber is the latest in a series
Modification of IPG Driver for Road Robustness Applications
 Modification of IPG Driver for Road Robustness Applications Alexander Shawyer (BEng, MSc) Alex Bean (BEng, CEng. IMechE) SCS Analysis & Virtual Tools, Braking Development Jaguar Land Rover Introduction
Modification of IPG Driver for Road Robustness Applications Alexander Shawyer (BEng, MSc) Alex Bean (BEng, CEng. IMechE) SCS Analysis & Virtual Tools, Braking Development Jaguar Land Rover Introduction
Replace your belt, ball screw or rack and pinion mechanism with a simple and economical linear servo motor actuator
 LINEAR SERVO ECONO-SLIDE Ultimate Solution for High Throughput Precision Positioning Replace your belt, ball screw or rack and pinion mechanism with a simple and economical linear servo motor actuator
LINEAR SERVO ECONO-SLIDE Ultimate Solution for High Throughput Precision Positioning Replace your belt, ball screw or rack and pinion mechanism with a simple and economical linear servo motor actuator
Unit 1 Introduction to VEX and Robotics
 Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and
Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and
Performance Evaluation of Wheeled Rover by Analysis and Test
 Performance Evaluation of Wheeled Rover by Analysis and Test Gaurav Sharma, Srividhya G., Shamrao, K. Balaji, G. Nagesh, C.D. Sridhara Abstract Rovers provide a mobile platform for exploring planetary
Performance Evaluation of Wheeled Rover by Analysis and Test Gaurav Sharma, Srividhya G., Shamrao, K. Balaji, G. Nagesh, C.D. Sridhara Abstract Rovers provide a mobile platform for exploring planetary
Relative ride vibration of off-road vehicles with front-, rear- and both axles torsio-elastic suspension
 Relative ride vibration of off-road vehicles with front-, rear- and both axles torsio-elastic suspension Mu Chai 1, Subhash Rakheja 2, Wen Bin Shangguan 3 1, 2, 3 School of Mechanical and Automotive Engineering,
Relative ride vibration of off-road vehicles with front-, rear- and both axles torsio-elastic suspension Mu Chai 1, Subhash Rakheja 2, Wen Bin Shangguan 3 1, 2, 3 School of Mechanical and Automotive Engineering,
An Overview of CSA s s Space Robotics Activities
 An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
Development and Testing of the Mars Rover Mobility Platform for Educational and Research Purposes
 Development and Testing of the Mars Rover Mobility Platform for Educational and Research Purposes Luiz Filipe Barbosa 1, Jevgenijs Trunins 2, Yahya H Zweiri 3, Malcolm Claus 4, Niklaus Kamm 5 1, 2, 3 School
Development and Testing of the Mars Rover Mobility Platform for Educational and Research Purposes Luiz Filipe Barbosa 1, Jevgenijs Trunins 2, Yahya H Zweiri 3, Malcolm Claus 4, Niklaus Kamm 5 1, 2, 3 School
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, GMT
 Friday, October 30, GMT") Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Description of the Locomotion Control Architecture on the ExoMars Rover Breadboard
 Research Collection Conference Paper Description of the Locomotion Control Architecture on the ExoMars Rover Breadboard Author(s): Hoepflinger, Markus; Krebs, Ambroise; Pradalier, Cedric; Lee, C.; Obstei,
Research Collection Conference Paper Description of the Locomotion Control Architecture on the ExoMars Rover Breadboard Author(s): Hoepflinger, Markus; Krebs, Ambroise; Pradalier, Cedric; Lee, C.; Obstei,
1 Summary PROPORTIONAL RESPONSE TECHNICAL SUMMARY. Contents
 HABIT WHITE PAPER PROPORTIONAL RESPONSE TECHNICAL SUMMARY Contents 1 Summary 1 2 Suspension for Mountain Bikes 2 3 Proportional Response 10 4 Experimental Validation of Suspension Response 12 5 Size Specific
HABIT WHITE PAPER PROPORTIONAL RESPONSE TECHNICAL SUMMARY Contents 1 Summary 1 2 Suspension for Mountain Bikes 2 3 Proportional Response 10 4 Experimental Validation of Suspension Response 12 5 Size Specific
ABB Positioners -reliability -quality -performance
 Positioner range - 1-01-11-06 - ABB Positioners -reliability -quality -performance Positioner range - 2 Positioner range General features All All ABB ABB positioners are are of of robust robust construction
Positioner range - 1-01-11-06 - ABB Positioners -reliability -quality -performance Positioner range - 2 Positioner range General features All All ABB ABB positioners are are of of robust robust construction
Some Thoughts on Simulations in Terramechanics
 Some Thoughts on Simulations in Terramechanics J.Y. Wong Professor Emeritus and Distinguished Research Professor Carleton University and Vehicle Systems Development Corporation Ottawa, Canada Copyright
Some Thoughts on Simulations in Terramechanics J.Y. Wong Professor Emeritus and Distinguished Research Professor Carleton University and Vehicle Systems Development Corporation Ottawa, Canada Copyright
HOLDER S SERIES / M 480 BENEFITS, FEATURES AND TECHNICAL DATA
 HOLDER S SERIES / M 480 BENEFITS, FEATURES AND TECHNICAL DATA HOLDER S SERIES / M 480 3 ATTACHMENT AREAS For the flexible use of powerful attachments. 2 standardised attachment areas (front and rear lift)
HOLDER S SERIES / M 480 BENEFITS, FEATURES AND TECHNICAL DATA HOLDER S SERIES / M 480 3 ATTACHMENT AREAS For the flexible use of powerful attachments. 2 standardised attachment areas (front and rear lift)
Aerial robots that interact with the environment
 Aerial robots that interact with the environment Guillermo Heredia*, Aníbal Ollero * Professor at University of Seville, Spain Robotics, Vision and Control group (GRVC) guiller@us.es Robotics, Vision and
Aerial robots that interact with the environment Guillermo Heredia*, Aníbal Ollero * Professor at University of Seville, Spain Robotics, Vision and Control group (GRVC) guiller@us.es Robotics, Vision and
R-SERIES MULTI-AXIS INDUSTRIAL ROBOTS
 Automation Solutions R-SERIES MULTI-AXIS INDUSTRIAL ROBOTS COMPACT MULTI-AXIS INDUSTRIAL ROBOTS FOR COMPLEX PROCESSING TASKS Reduce Manufacturing Costs Improve Production Time Increase Throughput Engineering
Automation Solutions R-SERIES MULTI-AXIS INDUSTRIAL ROBOTS COMPACT MULTI-AXIS INDUSTRIAL ROBOTS FOR COMPLEX PROCESSING TASKS Reduce Manufacturing Costs Improve Production Time Increase Throughput Engineering
Smart Automated Vent Register Using an SMA Spring Actuated Rotary Ratchet
 Smart Automated Vent Register Using an SMA Spring Actuated Rotary Ratchet Mary Molepske, Victor Braciszewski, James Butler, Gregory Caputo, Fan-Ning Cheng, WonHee Kim, Jonathan Luntz, Diann Brei ABSTRACT
Smart Automated Vent Register Using an SMA Spring Actuated Rotary Ratchet Mary Molepske, Victor Braciszewski, James Butler, Gregory Caputo, Fan-Ning Cheng, WonHee Kim, Jonathan Luntz, Diann Brei ABSTRACT
Product advantages Mobile crane LTM 1160/2
 Product advantages Mobile crane LTM 1160/2 Max. lifting capacity: 160 t at 3 m radius Max. height under hook: 96 m with swing-away jib Max. radius: 74 m with swing-away jib Performance profile of the LTM
Product advantages Mobile crane LTM 1160/2 Max. lifting capacity: 160 t at 3 m radius Max. height under hook: 96 m with swing-away jib Max. radius: 74 m with swing-away jib Performance profile of the LTM
Enhancing Wheelchair Mobility Through Dynamics Mimicking
 Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
ISO INTERNATIONAL STANDARD
 INTERNATIONAL STANDARD ISO 7176-4 Second edition 1997-12-15 Wheelchairs Part 4: Energy consumption of electric wheelchairs and scooters for determination of theoretical distance range Fauteuils roulants
INTERNATIONAL STANDARD ISO 7176-4 Second edition 1997-12-15 Wheelchairs Part 4: Energy consumption of electric wheelchairs and scooters for determination of theoretical distance range Fauteuils roulants
SRC550 SRC550 ROUGH-TERRAIN CRANE 55 TONS LIFTING CAPACITY. Quality Changes the World SRC550
 SRC550 SRC550 ROUGH-TERRAIN CRANE 55 TONS LIFTING CAPACITY SRC550 2 SRC550 Rough-TeRRain CRane COMPANY BRIFE SANY Automobile Hoisting Machinery is one of the core business unit of Sany Heavy Industry,
SRC550 SRC550 ROUGH-TERRAIN CRANE 55 TONS LIFTING CAPACITY SRC550 2 SRC550 Rough-TeRRain CRane COMPANY BRIFE SANY Automobile Hoisting Machinery is one of the core business unit of Sany Heavy Industry,
LIGHTWEIGHT HARMONIC DRIVE GEARS FOR NEXT GENERATION ROBOTS
 LIGHTWEIGHT HARMONIC DRIVE GEARS FOR NEXT GENERATION ROBOTS Dr. Rolf Slatter * & Dr. Hans Koenen ** *Director of Marketing & Sales E-mail: slatter@harmonicdrive.de **Manager Mechanical R&D E-mail: koenen@harmonicdrive.de
LIGHTWEIGHT HARMONIC DRIVE GEARS FOR NEXT GENERATION ROBOTS Dr. Rolf Slatter * & Dr. Hans Koenen ** *Director of Marketing & Sales E-mail: slatter@harmonicdrive.de **Manager Mechanical R&D E-mail: koenen@harmonicdrive.de
DESIGN AND ANALYSIS OF PUSH ROD ROCKER ARM SUSPENSION USING MONO SPRING
 Volume 114 No. 9 2017, 465-475 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu DESIGN AND ANALYSIS OF PUSH ROD ROCKER ARM SUSPENSION USING MONO SPRING
Volume 114 No. 9 2017, 465-475 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu DESIGN AND ANALYSIS OF PUSH ROD ROCKER ARM SUSPENSION USING MONO SPRING
Development of a Self-latching Hold-down RElease Kinematic (SHREK)
") Development of a Self-latching Hold-down RElease Kinematic (SHREK) Ruggero Cassanelli * Abstract SHREK (Self-latching Hold-down Release Kinematic), is an innovative shape memory actuated hold down and
Development of a Self-latching Hold-down RElease Kinematic (SHREK) Ruggero Cassanelli * Abstract SHREK (Self-latching Hold-down Release Kinematic), is an innovative shape memory actuated hold down and