Astro the Rover. Olympus Mons Rover Team
|
|
|
- Naomi Hunt
- 6 years ago
- Views:
Transcription

1 Astro the Rover Olympus Mons Rover Team
2 Purpose: Design a robotic vehicle capable of performing tasks for a sample return mission within the parameters and requirements of the University Rover Challenge.

3 University Rover Challenge: International robotics competition for college students. Held annually in the desert of southern Utah Challenges engineering students to design and build the next generation of Mars rovers that will one day work alongside astronauts exploring the Red Planet.




4 Mars Science Laboratory Curiosity Rover Features: 6 Wheel Rocker Bogie Suspension 20 in Diameter Cleated Wheels Independent Wheel Steering Science Analysis Tools 5 DOF Arm Stowage System Mars Exploration Rover Opportunity Features: 6 Wheel Rocker Bogie Suspension 1.5 m x 2.3 m x 1.6 m Independent Wheel Steering Safely Operational at 30 (max) 5 DOF Arm Stowage System Literature Survey
5 PHASE 1 PRELIMINARY DESIGN: Olympus Mons Rover Team shall generate a list of key components and modules for baseline approach. PHASE 2 DETAILED DESIGNS: Olympus Mons Rover Team shall finalize optical, mechanical, and electrical design. PHASE 3 MANUFACTURING: Olympus Mons Rover Team shall create any necessary manufacturing documentation and procedures. PHASE 4 TESTING AND INTEGRATION: Olympus Mons Rover team shall assist in creating a smooth, logical, and efficient work flow. Statement of Work
6 Project Schedule
7 Team Captain: Christopher Nguyen Chassis: Jerame Taylor Robotic Arm: Lauren DuCharme Suspension: Ken Greene Wheels Assembly: Greg Maisch Telemetry/Visual Systems: Maria Gutierrez Weight Distribution Yolanda Mora MelanieValenzuela Quy Tran Chris Thompson Matt Wolfenden Daniel Lu Nathan Johnson Carissa Pariseau1 Accommodating Payload Arm Design Grippers Rocker Bogey System Rocker Arms Protecting Gear Box and Motor Connecting Wheels to Assembly Optics and Moveable Visual System Camera Orientations GPS Team Structure
8 Design Parameter Requirement Entire Vehicle Weight < 50 kg Vehicle Volume < 1 m 3 Vehicle Width < 32 in Functional Temperature Range Up to 110 F Minimum Lift Capacity 5 kg Movement Control Wireless/Remote Control Minimum Reach Capability 5 cm below ground Science Tools ph and humidity meter Video Feed Wireless Frequency Band 900MHz-2.4GHz A-Specs



9 ION Rover 2014 Features: 6 Individually controlled wheels Rocker bogie suspension 7.5 in diameter RC wheels 3 DOF Arm Closed loop feedback system

10 ION Rover 2015 Concepts


11 2014: Used square wood base with aluminum channel siding Electronics not protected from environment Limited space Structurally unstable and weak Chassis Design Concepts
12 Function Possible Solution Provide Support to Vehicle C-Channel Bar-Stock Flat, Solid Tubing Maintain Shape and Strength Aluminum Steel Plastic PVC Carbon Fiber Maneuverable Rectangular Box Circular Octagon Square Provide Space for Arm and Electrical Components Flat Bi-Level Chassis Morph Chart


13 2015: Aluminum frame with aluminum base plate Bi-level design More easily accommodates electronic components Second level could act as cover to protect components from dust or rocks Change in shape to prevent wheel or suspension interference Final Design Concept
 Middle wheel slippage")

14 2014: Rocker bogie suspension (2 rocker arms/2 bogies) Middle wheel slippage Low vertical travel abilities Bulky and underoptimized Suspension Design Concepts
15 Function Possible Solution Support Chassis Weight 8 wheels 6 wheels 4 wheels Smooth Pivot Points Bearings Bushings None Rocker Length within A-Specs Bogie Length within A-Specs Attachable to Assembly 4 Bolt Pattern Single Post Free Single Post Fixed Support Load 0.25 Tall Tall 0.50 Tall Maintain Shape and Minimize Deflection Thick 0.25 Thick Thick Suspension Morph Chart



16 2014: Differential link Heim joint had too much play Under-designed Difficulties with alignment and concentricity on rotational point Suspension Design Concepts
17 Function Possible Solution Differential Type Differential Link Shaft (3 Bevel Gears) Shaft (4 Bevel Gears) Shaft Diameter Bevel Gear Ratio 1:1 2:1 1.5:1 Shaft Material Carbon Fiber with Aluminum Ends Full Aluminum Full Carbon Fiber Mating Mechanism Keyways Set Screws Spring pins Suspension Morph Chart

18 2015: Rocker Arm and Bogie Optimized for weight and strength Even weight distribution across wheels Clearance for 90 departure and approach Final Design Concepts

19 2015: Shaft with bevel gears 1:1 rotational ratio in rocker arm Improved concentricity difficulties More easily manufactured Final Design Concepts



20 Wheels Design Concepts 2014: Modified 1/5 scale RC wheels Non-pneumatic tires Required custom components Lacked motor adapters Non consistent compliance with substrate Bulky assembly Sufficient traction
21 Function Possible Solution Maintain Traction Rubber Cleats Pneumatic Foam and Tread Meet Size Requirements 8 in 10 in 9.5 in Motor Placement Protects Power System Gearbox Away from Wheel Gearbox Above Wheel -- Should be Light Weight Rubber Aluminum Stainless Steel Must be Easy to Manufacture Single Piece Aluminum Configuration Pocketed Single Piece Aluminum Configuration Separately Machined Aluminum Plates Wheels Morph Chart


22 2015: Custom Wheel 10 in diameter Not pneumatic More compact Light weight Elevated motor and gearbox Helps prevent damage from rocks and dust Lower rotational inertia Final Design Concept


23 2014: 3 DOF Planar Arm Simple control system forward kinematics Limited range of motion Insufficient strength to complete URC requirements Incapable of stowing Robotic Arm Design Concepts
24 Function Possible Solution Control and Power Systems Linear actuator Servo Stepper Motor Closed loop linkage Must Attach to Gripper Interface Bracket Directly Mounted Removable Linkage Ball screw joint Should Be Stowable Pre-Programmed Upward Configuration Pre-Programmed Downward Configuration Manual Upward Configuration Manual Downward Configuration Length Must Have Sample Collection Reachability Workspace Must Allow for Task Completion Below Above Adjacent to the chassis All the above End Effector Must Have Position Capabilities Linear actuator Servo Stepper Motor Ball screw Must Be Mounted to Chassis Top Bottom Center Rear Arm Morph Chart



25 2014: 2 finger parallel gripper Insufficient range of motion Lack of friction grip abilities Insufficient strength to complete URC task requirements Single end effector not optimized for each task End Effector Design Concepts
26 Function Possible Solution Multi-Task Functionality Removable Gripper Fingers Removable Gripper Removable Final Linkage w/ Gripper Sample Collection Capability Scooping Jaws Sample Coring Drill Sample Coring Probe Sample Containment Capability Glass Beaker on Top of Chassis Canvas w/ Framing on Side of Chassis Bag Attached to Gripper ph Analysis Capability ph Cards in Sample Receptacle ph Probe in Sample Receptacle Electronic ph Sensor w/ Arduino Humidity Analysis Capability ph Cards in Sample Receptacle Humidity Probe in Sample Receptacle Electronic Humidity Sensor w/ Arduino Astronaut Assistance Capability 3 Finger Gripper with Independent Control 3 Finger Gripper with Overall Control 2 Finger Gripper Servicing Task Capability Re-use Astronaut Assistance Gripper Conveyer Belt Finger Gripper 3 Finger Angled Gripper End Effector Morph Chart


27 2015: 3 DOF Planar Arm Larger workspace to accommodate multiple tasks Utilizes 4 bar linkage with linear actuator Configuration can be stowed to prevent damage during terrain traversing Final Design Concept



28 Final Design Concepts 2015: Complete redesign that features custom grippers for each task Longworth chuck Equipment servicing task Knurled fingers for added grip Single finger actuation gripper Astronaut assistance Encompassing grip for handles and object retrieval Sample collection scoop Sample return task Bulk sampling and collection


29 2014: Telemetry system Individually controlled wheel Single Camera Visual via FPV Unstable pan/tilt servos Lacked Visual Clarity Telemetry Design Concepts

: Operating Voltage: 4.8-7.")
 Power")
30 2015: Arduino Mega: 54 I/O Pins, Input Voltage: 7-12V Arduino Uno: 16 I/O Pins, Input Voltage: 7-12 V HS-5685MH Servos (end effectors min. 3): Operating Voltage: V Radio Frequency: Video feed: 5.8 GHz Control: 2.4 GHz Antenna: (Cloverleaf & Air Max Bullet) Power Rating: up to 24V Final Design Concepts

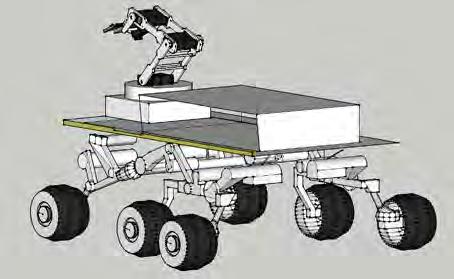
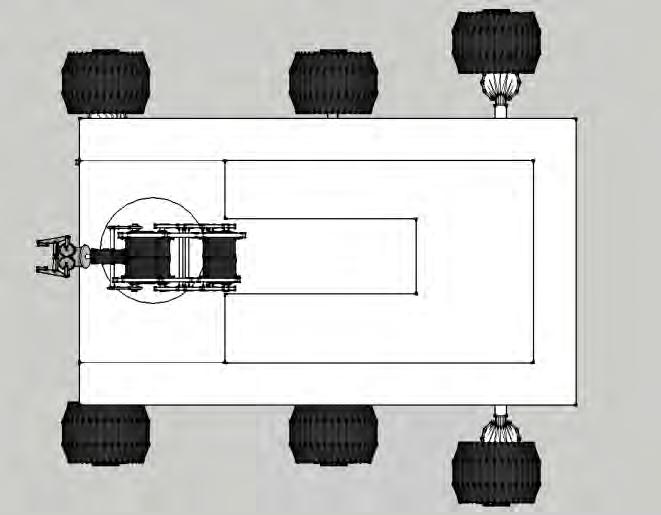
31 Features: 6 Wheel Rocker Bogie Suspension 10 in Diameter Cleated Wheels Independent Wheel Steering 3 DOF Arm with 3 Custom Grippers ION Rover
32 Jesse Grimes-York Brett Kennedy Jet Propulsion Laboratory Dr. Nina Robson Dr. JiDong Huang Ye Daniel Lu CSUF Electrical Engineering Student CSUF Geology Department CSUF Electrical Engineering Department CSUF ION Website Design Team Acknowledgements
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science
 Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
The Design of an Omnidirectional All-Terrain Rover Chassis
 The Design of an Omnidirectional All-Terrain Rover Chassis Abstract Submission for TePRA 2011: the 3rd Annual IEEE International Conference on Technologies for Practical Robot Applications Timothy C. Lexen,
The Design of an Omnidirectional All-Terrain Rover Chassis Abstract Submission for TePRA 2011: the 3rd Annual IEEE International Conference on Technologies for Practical Robot Applications Timothy C. Lexen,
DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN
 Ready 12th Symposium on Advance Space Technologies in Robotics and Automation, ESA / ESTEC, Noordwijk, The Nethelands DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN Shivesh Kumar, Raghavendra
Ready 12th Symposium on Advance Space Technologies in Robotics and Automation, ESA / ESTEC, Noordwijk, The Nethelands DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN Shivesh Kumar, Raghavendra
F.I.R.S.T. Robotic Drive Base
 F.I.R.S.T. Robotic Drive Base Design Team Shane Lentini, Jose Orozco, Henry Sick, Rich Phelan Design Advisor Prof. Sinan Muftu Abstract F.I.R.S.T. is an organization dedicated to inspiring and teaching
F.I.R.S.T. Robotic Drive Base Design Team Shane Lentini, Jose Orozco, Henry Sick, Rich Phelan Design Advisor Prof. Sinan Muftu Abstract F.I.R.S.T. is an organization dedicated to inspiring and teaching
Design and Implementation of a Rocker-Bogie Suspension for a Mining Robot
 Design and Implementation of a Rocker-Bogie Suspension for a Mining Robot Wesley B. Williams and Eric J. Schaus University of North Carolina at Charlotte/Georgia Institute of Technology Abstract As their
Design and Implementation of a Rocker-Bogie Suspension for a Mining Robot Wesley B. Williams and Eric J. Schaus University of North Carolina at Charlotte/Georgia Institute of Technology Abstract As their
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, GMT
 Friday, October 30, GMT") Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Powered Remote Manipulators Perform Hazardous Retrieval, Handling, and Size Reduction Operations
 Powered Remote Manipulators Perform Hazardous Retrieval, Handling, and Size Reduction Operations M.D. Cole, J.R. Owen, S.R. Adams S.A.Robotics, Inc. 3985 S. Lincoln Avenue, Suite 100, Loveland, Colorado
Powered Remote Manipulators Perform Hazardous Retrieval, Handling, and Size Reduction Operations M.D. Cole, J.R. Owen, S.R. Adams S.A.Robotics, Inc. 3985 S. Lincoln Avenue, Suite 100, Loveland, Colorado
Case Studies on NASA Mars Rover s Mobility System
 Case Studies on NASA Mars Rover s Mobility System Shih-Liang (Sid) Wang 1 Abstract Motion simulation files based on Working Model 2D TM are developed to simulate Mars rover s mobility system. The rover's
Case Studies on NASA Mars Rover s Mobility System Shih-Liang (Sid) Wang 1 Abstract Motion simulation files based on Working Model 2D TM are developed to simulate Mars rover s mobility system. The rover's
DESIGN AND DEVELOPMENT OF A SUSPENSION SYSTEM USED IN ROUGH- TERRAIN VEHICLE CONTROL FOR VIBRATION SUPPRESSION IN PLANETARY EXPLORATION
 DESIGN AND DEVELOPMENT OF A SUSPENSION SYSTEM USED IN ROUGH- TERRAIN VEHICLE CONTROL FOR VIBRATION SUPPRESSION IN PLANETARY EXPLORATION Arvin Niro College of Engineering University of Hawaiʽi at Mānoa
DESIGN AND DEVELOPMENT OF A SUSPENSION SYSTEM USED IN ROUGH- TERRAIN VEHICLE CONTROL FOR VIBRATION SUPPRESSION IN PLANETARY EXPLORATION Arvin Niro College of Engineering University of Hawaiʽi at Mānoa
Unit 1 Introduction to VEX and Robotics
 Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and
Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and
PRELIMINARY DESIGN REVIEW
 PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
Lifting Mechanisms. Example 1: Two Stage Lift
 Lifting Mechanisms The primary scoring method for the 2018 game is to deposit fuel cubes into scoring zones. A manipulator fixed to your robot can deliver fuel cubes into ground level scoring zones, but
Lifting Mechanisms The primary scoring method for the 2018 game is to deposit fuel cubes into scoring zones. A manipulator fixed to your robot can deliver fuel cubes into ground level scoring zones, but
Compact systems! Ball screw and toothed belt axes ELGC and mini slides EGSC. Modular and low cost
 Ball screw and toothed belt axes ELGC and mini slides EGSC Modular and low cost Compact systems! Highlights Compact, lightweight systems Low cost solutions Modular axes easily assembled into multi-axis
Ball screw and toothed belt axes ELGC and mini slides EGSC Modular and low cost Compact systems! Highlights Compact, lightweight systems Low cost solutions Modular axes easily assembled into multi-axis
Name: Space Exploration PBL
 Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Development of Inspection Tools for the AY-102 Double-Shell Tank at the Hanford DOE Site
 Development of Inspection Tools for the AY-102 Double-Shell Tank at the Hanford DOE Site Ryan Sheffield Florida International University April 6, 2016 Team Members Principle Investigator: Leonel, Lagos,
Development of Inspection Tools for the AY-102 Double-Shell Tank at the Hanford DOE Site Ryan Sheffield Florida International University April 6, 2016 Team Members Principle Investigator: Leonel, Lagos,
Compact. Flat. Productive. Compact Change System CWS
 CWS Compact. Flat. Productive. Compact Change System CWS Compact manual change system with integrated air feed-through for the most important SCHUNK gripping and compensating modules. Field of Application
CWS Compact. Flat. Productive. Compact Change System CWS Compact manual change system with integrated air feed-through for the most important SCHUNK gripping and compensating modules. Field of Application
1101 DZB CNC Drilling and Sawing Line
 File Photo 1101 DZB CNC Drilling and Sawing Line TECHNICAL DESCRIPTION For the web and flange drilling of structural sections according to the following specifications: I-Beams Beam depth Minimum 3-1/8
File Photo 1101 DZB CNC Drilling and Sawing Line TECHNICAL DESCRIPTION For the web and flange drilling of structural sections according to the following specifications: I-Beams Beam depth Minimum 3-1/8
2. The Challenge. 1. Introduction. 3. Rover Prototype NASA Research Space Grant Page 1
 Self-Orientating Autonomous Pathfinder (S.O.A.P.) Matt Bird, birdmw@gmail.com Tina Sandaval, tinapeapood@gmail.com Matt Wicke, mwicke@mscd.edu, Mark Nenninger, mnenning@mscd.edu Metropolitan State College
Self-Orientating Autonomous Pathfinder (S.O.A.P.) Matt Bird, birdmw@gmail.com Tina Sandaval, tinapeapood@gmail.com Matt Wicke, mwicke@mscd.edu, Mark Nenninger, mnenning@mscd.edu Metropolitan State College
Table of Contents. Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.
 Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.") March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
IEEE SoutheastCon Hardware Challenge
 IEEE SoutheastCon Hardware Challenge Cameron McSweeney, Kendall Knapp Brian Roskuszka, Daniel Hofstetter Advisors: Dr. Jing Wang, Dr. Yufeng Lu, Dr. In Soo Ahn Overview Introduction Review of Literature
IEEE SoutheastCon Hardware Challenge Cameron McSweeney, Kendall Knapp Brian Roskuszka, Daniel Hofstetter Advisors: Dr. Jing Wang, Dr. Yufeng Lu, Dr. In Soo Ahn Overview Introduction Review of Literature
LDM ROAD-RAIL NDT INSPECTION MOBILE LABORATORY
 LDM-LR version of the laboratory is equipped with a device which is intended for quick switching from the rail track with mm gauge to the general European track with 1435 mm gauge. This feature makes it
LDM-LR version of the laboratory is equipped with a device which is intended for quick switching from the rail track with mm gauge to the general European track with 1435 mm gauge. This feature makes it
Technical Robustness and Quality
 Technical Robustness and Quality www.teamrush27.net Rock Solid Robot Page Title 1-4 Robustness In Concept And Fabrication 5 Creative Concepts For Tomorrow s Technology 6-8 Rock Solid Controls 9-10 Effectively
Technical Robustness and Quality www.teamrush27.net Rock Solid Robot Page Title 1-4 Robustness In Concept And Fabrication 5 Creative Concepts For Tomorrow s Technology 6-8 Rock Solid Controls 9-10 Effectively
Table of Contents OVERVIEW VALUES DECLARATION TEAM ORGANIZATIONAL CHART
 OVERVIEW VALUES DECLARATION TEAM ORGANIZATIONAL CHART Table of Contents INTRODUCTION SPECIFICATIONS FEATURES BASIC COMPONENTS OF CAR (READYMADE) BASIC COMPONENTS OF CAR (FABRICATED) MECHANICAL COMPONENTS
OVERVIEW VALUES DECLARATION TEAM ORGANIZATIONAL CHART Table of Contents INTRODUCTION SPECIFICATIONS FEATURES BASIC COMPONENTS OF CAR (READYMADE) BASIC COMPONENTS OF CAR (FABRICATED) MECHANICAL COMPONENTS
roving on the moon Leader Notes for Grades 6 12 The Challenge Prepare ahead of time Introduce the challenge (5 minutes)
") for Grades 6 12 roving on the moon Leader Notes The Challenge Build a rubber band-powered rover that can scramble across the room. In this challenge, kids follow the engineering design process to: (1)
for Grades 6 12 roving on the moon Leader Notes The Challenge Build a rubber band-powered rover that can scramble across the room. In this challenge, kids follow the engineering design process to: (1)
INTRODUCTION Team Composition Electrical System
 IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
LEG. Application example. Electrical 2-Finger Parallel Gripper Long-stroke Gripper. Gripping force 1050 N 1500 N. Weight 9 kg 11.
 LEG www.comoso.com Size 760 Weight 9 kg 11.6 kg Gripping force 1050 N 1500 N Stroke per finger 281 mm Workpiece weight 15.75 kg 22.5 kg Application example Gripping unit for top loading and palettizing
LEG www.comoso.com Size 760 Weight 9 kg 11.6 kg Gripping force 1050 N 1500 N Stroke per finger 281 mm Workpiece weight 15.75 kg 22.5 kg Application example Gripping unit for top loading and palettizing
DURA-TRANS NB-SERIES. Bi-Directional Transfer NB-10 NB-20 TECHNICAL SPECIFICATION OPERATING PRINCIPLES 6-1.1
 NB-SERIES NB Series of Bidirectional Transfer Devices, commonly known as tuckers, provide a practical low-cost method for automatic work positioning. The units are extremely compact and eliminate the need
NB-SERIES NB Series of Bidirectional Transfer Devices, commonly known as tuckers, provide a practical low-cost method for automatic work positioning. The units are extremely compact and eliminate the need
R-SERIES MULTI-AXIS INDUSTRIAL ROBOTS
 Automation Solutions R-SERIES MULTI-AXIS INDUSTRIAL ROBOTS COMPACT MULTI-AXIS INDUSTRIAL ROBOTS FOR COMPLEX PROCESSING TASKS Reduce Manufacturing Costs Improve Production Time Increase Throughput Engineering
Automation Solutions R-SERIES MULTI-AXIS INDUSTRIAL ROBOTS COMPACT MULTI-AXIS INDUSTRIAL ROBOTS FOR COMPLEX PROCESSING TASKS Reduce Manufacturing Costs Improve Production Time Increase Throughput Engineering
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE500-350HL Hexapods and Robotics HexGen HE500-350HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 110 mm and angular travels to 40 Precision design
HexGen HE500-350HL Hexapods and Robotics HexGen HE500-350HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 110 mm and angular travels to 40 Precision design
University Student Launch Initiative
 University Student Launch Initiative HARDING UNIVERSITY Critical Design Review February 4, 2008 The Team Dr. Edmond Wilson Brett Keller Team Official Project Leader, Safety Officer Professor of Chemistry
University Student Launch Initiative HARDING UNIVERSITY Critical Design Review February 4, 2008 The Team Dr. Edmond Wilson Brett Keller Team Official Project Leader, Safety Officer Professor of Chemistry
rev. 01/2017 Mission To Mars
 Mission To Mars Scenario Newcastle Academics Space Agency (NASA) is aiming be the first international agency send humans Mars. They have developed an extremely small and fast space craft carry your team.
Mission To Mars Scenario Newcastle Academics Space Agency (NASA) is aiming be the first international agency send humans Mars. They have developed an extremely small and fast space craft carry your team.
Discovery Center Gesture Control Robotics Exhibit Product Requirements
 Discovery Center Gesture Control Robotics Exhibit Product Requirements U of I Discovery Austyn Sullivan-Watson Angelo Stratigakes Zhihui Wang Chaeun Kim 1 Document History Rev Number Date Modified By Reason
Discovery Center Gesture Control Robotics Exhibit Product Requirements U of I Discovery Austyn Sullivan-Watson Angelo Stratigakes Zhihui Wang Chaeun Kim 1 Document History Rev Number Date Modified By Reason
Uniport CNC Portal Machining Centre with Pallet Changer.
 Uniport 6 CNC Portal Machining Centre with Pallet Changer www.unisign.nl Uniport 6 UNISIGN The economical solution to flexible manufacturing! Since the introduction of the UNIPORT portal machining centres,
Uniport 6 CNC Portal Machining Centre with Pallet Changer www.unisign.nl Uniport 6 UNISIGN The economical solution to flexible manufacturing! Since the introduction of the UNIPORT portal machining centres,
ElectroCraft RapidPower Xtreme Brushless DC Servo Motors
 ElectroCraft RapidPower Xtreme Brushless DC Servo Motors Product Datasheets for RPX22 RPX32 RPX4 RPX52 About ElectroCraft is a global provider of dependable, application-engineered fractional-horsepower
ElectroCraft RapidPower Xtreme Brushless DC Servo Motors Product Datasheets for RPX22 RPX32 RPX4 RPX52 About ElectroCraft is a global provider of dependable, application-engineered fractional-horsepower
The H-MAC Heavy Metal Articulating Chassis Construction Guide
 The H-MAC Heavy Metal Articulating Chassis Construction Guide The Heavy Metal Chassis is constructed with two identical drive modules built using 10 mechanical sub-assemblies. The drive modules are integrated
The H-MAC Heavy Metal Articulating Chassis Construction Guide The Heavy Metal Chassis is constructed with two identical drive modules built using 10 mechanical sub-assemblies. The drive modules are integrated
Ball splines can be configured for an endless number of automated operations. Demystifying Ball Spline Specs
 Ball splines can be configured for an endless number of automated operations. Demystifying Ball Spline Specs Place a recirculating-ball bushing on a shaft and what do you get? Frictionless movement of
Ball splines can be configured for an endless number of automated operations. Demystifying Ball Spline Specs Place a recirculating-ball bushing on a shaft and what do you get? Frictionless movement of
Rover - Remote Operated Vehicle for Extraction and Reconnaissance
 IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 9, Issue 4 (Nov. - Dec. 2013), PP 38-42 Rover - Remote Operated Vehicle for Extraction and Reconnaissance
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 9, Issue 4 (Nov. - Dec. 2013), PP 38-42 Rover - Remote Operated Vehicle for Extraction and Reconnaissance
Robots to Support a Human Mars Mission
 Robots to Support a Human Mars Mission 1 W. Naumann, P. Hofmann, A. v. Richter Kayser-Threde GmbH Wolfratshauser Str. 48, D-81379 München email: andreas.von.richter@kayser-threde.com 7th Workshop ASTRA
Robots to Support a Human Mars Mission 1 W. Naumann, P. Hofmann, A. v. Richter Kayser-Threde GmbH Wolfratshauser Str. 48, D-81379 München email: andreas.von.richter@kayser-threde.com 7th Workshop ASTRA
Innovative Designs For Positive Parts Transfer
 Innovative Designs For Positive Parts Transfer AUTO-SLIDE CATALOG CONTENTS Cylinder Powered Linear Slide (AFPRS ) 3 Cylinder Powered Bi-Directional Slide (AFPRBD) 6 V Style Pick & Place (AFPPV) 8 L Style
Innovative Designs For Positive Parts Transfer AUTO-SLIDE CATALOG CONTENTS Cylinder Powered Linear Slide (AFPRS ) 3 Cylinder Powered Bi-Directional Slide (AFPRBD) 6 V Style Pick & Place (AFPPV) 8 L Style
John Klaus Robert Cooper Thilina Fernando Zoe Morozko
 Faculty Advisors: Dr. Dan Kirk Greg Peebles Justin Treptow Alex Morrese Alexis Mendez Casselle Russell John Klaus Robert Cooper Thilina Fernando Zoe Morozko Paul Martin Ben Burnett Damian Harasiuk 1 Launch
Faculty Advisors: Dr. Dan Kirk Greg Peebles Justin Treptow Alex Morrese Alexis Mendez Casselle Russell John Klaus Robert Cooper Thilina Fernando Zoe Morozko Paul Martin Ben Burnett Damian Harasiuk 1 Launch
LUNAR WHEEL TEAM TEAM: ADAM ANDERSON DAN BARRET RICHARD FREDRICKSON KRISTINA LYNN RAMOS ERIC SOLIS. ADVISORS: Dr. COLIN BRITCHER Dr.
 LUNAR WHEEL TEAM TEAM: ADAM ANDERSON DAN BARRET RICHARD FREDRICKSON KRISTINA LYNN RAMOS ERIC SOLIS ADVISORS: Dr. COLIN BRITCHER Dr. SEBASTIAN BAWAB OBJECTIVE design a wheel that would be resistant to the
LUNAR WHEEL TEAM TEAM: ADAM ANDERSON DAN BARRET RICHARD FREDRICKSON KRISTINA LYNN RAMOS ERIC SOLIS ADVISORS: Dr. COLIN BRITCHER Dr. SEBASTIAN BAWAB OBJECTIVE design a wheel that would be resistant to the
Advanced Actuation Solutions
 Advanced Actuation Solutions Leveling...4-5 Revised Content January 2012 Leveling Hydraulic Leveling Heavy Duty w/tag Axle: Part Number: 9010000328 Power Down/ Power Up- GVWR to 54K Heavy Duty Part Number:
Advanced Actuation Solutions Leveling...4-5 Revised Content January 2012 Leveling Hydraulic Leveling Heavy Duty w/tag Axle: Part Number: 9010000328 Power Down/ Power Up- GVWR to 54K Heavy Duty Part Number:
Preliminary Design Review. California State University, Long Beach USLI November 13th, 2017
 Preliminary Design Review California State University, Long Beach USLI November 13th, 2017 System Overview Launch Vehicle Dimensions Total Length 108in Airframe OD 6.17in. ID 6.00in. Couplers OD 5.998in.
Preliminary Design Review California State University, Long Beach USLI November 13th, 2017 System Overview Launch Vehicle Dimensions Total Length 108in Airframe OD 6.17in. ID 6.00in. Couplers OD 5.998in.
Force Feedback Manipulator
 Force Feedback Manipulator Features Strong Rugged heavy duty construction Powerful 500 lbs of maximum lift, 200 lbs at full extension Compact Less than 36" x 19" x 8" in stowed configuration High Dexterity
Force Feedback Manipulator Features Strong Rugged heavy duty construction Powerful 500 lbs of maximum lift, 200 lbs at full extension Compact Less than 36" x 19" x 8" in stowed configuration High Dexterity
PROJECT IDEA SUBMISSION
 PROJECT IDEA SUBMISSION Team Contacts - 1 st person listed serves as the point of contact with Professor Nelson - Initial team size may be from 1 to 6 members (all members must agree to have their name
PROJECT IDEA SUBMISSION Team Contacts - 1 st person listed serves as the point of contact with Professor Nelson - Initial team size may be from 1 to 6 members (all members must agree to have their name
The Systems Approach to Mechatronics Education
 The Systems Approach to Mechatronics Education Marilyn Barger, FLATE (Florida Advanced Technological Education Center of Excellence) Dan Horine, Virginia Western Community College Protection notice / Copyright
The Systems Approach to Mechatronics Education Marilyn Barger, FLATE (Florida Advanced Technological Education Center of Excellence) Dan Horine, Virginia Western Community College Protection notice / Copyright
The Affordable Quick Entry Level Robot Kit
 RelayRover : The Affordable Quick Entry Level Robot Kit 1 The Affordable Quick Entry Level Robot Kit The RelayRover (R2) is a great entry level affordable robot kit set that allows any beginner in robotics
RelayRover : The Affordable Quick Entry Level Robot Kit 1 The Affordable Quick Entry Level Robot Kit The RelayRover (R2) is a great entry level affordable robot kit set that allows any beginner in robotics
Length Height Rotor Diameter Tail Rotor Diameter..12. Tail Boom Length Width
 2.1 Air Vehicle 2.1.1 Vehicle General Description The PA-01 Vapor S-UAV is a rotary wing small unmanned aerial vehicle. The AV is powered by an outrunner 8.5hp class brushless electric motor. The airframe
2.1 Air Vehicle 2.1.1 Vehicle General Description The PA-01 Vapor S-UAV is a rotary wing small unmanned aerial vehicle. The AV is powered by an outrunner 8.5hp class brushless electric motor. The airframe
GSM. Modular Design. Versions of the series. Type GSM. Gripper type P Z W R. Size. {} AS IS without O.D. clamping I.D. clamping
 GSM Pneumatic Gripper-Swivel System Modular Design Versions of the series Type GSM Gripper type P Z W R Size 32 40 50 64 30 38 45 16 20 25 32 40 16 20 25 32 40 Gripping force safety device {} AS IS without
GSM Pneumatic Gripper-Swivel System Modular Design Versions of the series Type GSM Gripper type P Z W R Size 32 40 50 64 30 38 45 16 20 25 32 40 16 20 25 32 40 Gripping force safety device {} AS IS without
Wheel Torque Transducer WTT-D x
 Wheel Torque Transducer WTT-D compact robust wireless Waterproof wheel torque transducer with telemetric signal transmission productive testing www.caema.de Advantages Driving in all weather conditions
Wheel Torque Transducer WTT-D compact robust wireless Waterproof wheel torque transducer with telemetric signal transmission productive testing www.caema.de Advantages Driving in all weather conditions
Flexible. Light. Productive. LEG Long-stroke Gripper
 LEG Flexible. Light. Productive. LEG Long-stroke Gripper Light long-stroke gripper for flexible and highly dynamic handling of various components Field of Application For use in a clean working environment,
LEG Flexible. Light. Productive. LEG Long-stroke Gripper Light long-stroke gripper for flexible and highly dynamic handling of various components Field of Application For use in a clean working environment,
AX-12A / AX18A Smart Robotic Arm Specifications / Advantages
 AX-12A / AX18A Smart Robotic Arm Specifications / Advantages There are two major advantages of the AX-12A / AX18 Smart Robotic Arm over other RC type (PWM) based robotic arms. 1. User configurable auto
AX-12A / AX18A Smart Robotic Arm Specifications / Advantages There are two major advantages of the AX-12A / AX18 Smart Robotic Arm over other RC type (PWM) based robotic arms. 1. User configurable auto
Angular and Parallel Grippers
 CAP0551_Grippers_R2.qxp:OEM_TA 2/8/17 2:16 PM Page ii Angular and Parallel Grippers Table of Contents: Grippers Angular Grippers, Parallel Grippers and Options & Accessories Angular Grippers Introduction...
CAP0551_Grippers_R2.qxp:OEM_TA 2/8/17 2:16 PM Page ii Angular and Parallel Grippers Table of Contents: Grippers Angular Grippers, Parallel Grippers and Options & Accessories Angular Grippers Introduction...
GRB. long life Compact Angular gripper SHIPS IN 1-2 days. Major Benefits. Industry Uses
 long life Compact Angular gripper SHIPS IN 1-2 days hardened steel jaws have robust design and include dowel holes for precise tooling location steel cover, jaw design, and tight jaw slots minimize external
long life Compact Angular gripper SHIPS IN 1-2 days hardened steel jaws have robust design and include dowel holes for precise tooling location steel cover, jaw design, and tight jaw slots minimize external
TENNESSEE STATE UNIVERSITY COLLEGE OF ENGINEERING, TECHNOLOGY AND COMPUTER SCIENCE
 TENNESSEE STATE UNIVERSITY COLLEGE OF ENGINEERING, TECHNOLOGY AND COMPUTER SCIENCE PRESENTS TSU-TIGER An Autonomous Robotic Ground Vehicle Technical Report 10 th Intelligent Ground Vehicle Competition
TENNESSEE STATE UNIVERSITY COLLEGE OF ENGINEERING, TECHNOLOGY AND COMPUTER SCIENCE PRESENTS TSU-TIGER An Autonomous Robotic Ground Vehicle Technical Report 10 th Intelligent Ground Vehicle Competition
DSSI UAV. Unmanned Aerial Vehicle. Research & Development Project
 UAV Unmanned Aerial Vehicle HISTORY AND SKILLS of Small UAV with electrically powered propeller Description of the solution: Airframe,electronics, 2 battery sets 1 spare Airframe, battery charger Transport
UAV Unmanned Aerial Vehicle HISTORY AND SKILLS of Small UAV with electrically powered propeller Description of the solution: Airframe,electronics, 2 battery sets 1 spare Airframe, battery charger Transport
Segway Robotic Mobility Platform (RMP) Specifications
 Specifications") Segway Robotic Mobility Platform (RMP) Specifications Proven Durability, Reliability, and Performance The Segway RMP takes the performance and engineering prowess demonstrated in the Segway Personal Transporter
Segway Robotic Mobility Platform (RMP) Specifications Proven Durability, Reliability, and Performance The Segway RMP takes the performance and engineering prowess demonstrated in the Segway Personal Transporter
LANSCE WIRE SCANNING DIAGNOSTICS DEVICE MECHANICAL DESIGN
 LANSCE WIRE SCANNING DIAGNOSTICS DEVICE MECHANICAL DESIGN Sergio Rodriguez Esparza, Los Alamos National Laboratory, Los Alamos, NM USA INTRODUCTION The Los Alamos Neutron Science Center (LANSCE) is one
LANSCE WIRE SCANNING DIAGNOSTICS DEVICE MECHANICAL DESIGN Sergio Rodriguez Esparza, Los Alamos National Laboratory, Los Alamos, NM USA INTRODUCTION The Los Alamos Neutron Science Center (LANSCE) is one
ustepper - Robot Arm Assembly instructions Microcontroller, stepper driver and encoder in an ultra-compact design! By ON Development IVS
 ustepper - Robot Arm Assembly instructions Microcontroller, stepper driver and encoder in an ultra-compact design! By ON Development IVS 2016 ON Development IVS All Rights Reserved Assembly notes The parts
ustepper - Robot Arm Assembly instructions Microcontroller, stepper driver and encoder in an ultra-compact design! By ON Development IVS 2016 ON Development IVS All Rights Reserved Assembly notes The parts
RED RAVEN, THE LINKED-BOGIE PROTOTYPE. Ara Mekhtarian, Joseph Horvath, C.T. Lin. Department of Mechanical Engineering,
 RED RAVEN, THE LINKED-BOGIE PROTOTYPE Ara Mekhtarian, Joseph Horvath, C.T. Lin Department of Mechanical Engineering, California State University, Northridge California, USA Abstract RedRAVEN is a pioneered
RED RAVEN, THE LINKED-BOGIE PROTOTYPE Ara Mekhtarian, Joseph Horvath, C.T. Lin Department of Mechanical Engineering, California State University, Northridge California, USA Abstract RedRAVEN is a pioneered
Rocketry Projects Conducted at the University of Cincinnati
 Rocketry Projects Conducted at the University of Cincinnati 2009-2010 Grant Schaffner, Ph.D. (Advisor) Rob Charvat (Student) 17 September 2010 1 Spacecraft Design Course Objectives Students gain experience
Rocketry Projects Conducted at the University of Cincinnati 2009-2010 Grant Schaffner, Ph.D. (Advisor) Rob Charvat (Student) 17 September 2010 1 Spacecraft Design Course Objectives Students gain experience
Linear Flexible Joint Cart Plus Single Inverted Pendulum (LFJC+SIP)
") Linear Motion Servo Plants: IP01 and IP02 Linear Flexible Joint Cart Plus Single Inverted Pendulum (LFJC+SIP) User Manual Table of Contents 1. Linear Flexible Joint Cart Plus Single Inverted Pendulum System
Linear Motion Servo Plants: IP01 and IP02 Linear Flexible Joint Cart Plus Single Inverted Pendulum (LFJC+SIP) User Manual Table of Contents 1. Linear Flexible Joint Cart Plus Single Inverted Pendulum System
UNIT-2 ROBOT DRIVE SYSTEMS AND END EFFECTORS
 UNIT-2 ROBOT DRIVE SYSTEMS AND END EFFECTORS CONTENTS 2.1 Pneumatic Drives 2.2 Hydraulic Drives 2.3 Mechanical Drives 2.4 Electrical Drives 2.5 D.C. Servo Motors 2.6 Stepper Motor 2.7 A.C. Servo Motors
UNIT-2 ROBOT DRIVE SYSTEMS AND END EFFECTORS CONTENTS 2.1 Pneumatic Drives 2.2 Hydraulic Drives 2.3 Mechanical Drives 2.4 Electrical Drives 2.5 D.C. Servo Motors 2.6 Stepper Motor 2.7 A.C. Servo Motors
Working with VEX Parts
 VEX Robotics Design System VEX Classroom Lab Kit The VEX Robotics Design System is divided up into several different Subsystems: Structure Subsystem Motion Subsystem Power Subsystem Sensor Subsystem Logic
VEX Robotics Design System VEX Classroom Lab Kit The VEX Robotics Design System is divided up into several different Subsystems: Structure Subsystem Motion Subsystem Power Subsystem Sensor Subsystem Logic
Rear Drive Axle and Differential
 Page 1 of 13 Rear Drive Axle and Differential GENERAL Item Part Number Description A - Electronic rear differential B - Open rear differential 1 - Rear driveshaft 2 - Electronic rear differential 3 - RH
Page 1 of 13 Rear Drive Axle and Differential GENERAL Item Part Number Description A - Electronic rear differential B - Open rear differential 1 - Rear driveshaft 2 - Electronic rear differential 3 - RH
ROTARY MODULES. Rotary modules
 Rotary modules Rotary modules ROTARY MODULES Series Size Page Rotary modules RM swivel unit 156 RM 08 160 RM 10 162 RM 12 164 RM 15 168 RM 21 172 RM rotor 176 RM 50 180 RM 110 182 RM 200 184 RM 310 186
Rotary modules Rotary modules ROTARY MODULES Series Size Page Rotary modules RM swivel unit 156 RM 08 160 RM 10 162 RM 12 164 RM 15 168 RM 21 172 RM rotor 176 RM 50 180 RM 110 182 RM 200 184 RM 310 186
Candy Coup-Link OVER YEARS OF INNOVATION
 Candy Coup-Link Zero-backlash, flexible-shaft couplings High torque, excellent response Accommodates misalignment and shaft endplay Aluminum and stainless steel options Inch and metric bores available
Candy Coup-Link Zero-backlash, flexible-shaft couplings High torque, excellent response Accommodates misalignment and shaft endplay Aluminum and stainless steel options Inch and metric bores available
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
GSM. Modular Design. Versions of the series. Type GSM. Gripper type P Z W R. Size. {} AS IS without O.D. clamping I.D. clamping
 GSM s Modular Design Versions of the series Type GSM Gripper type P Z W R Size 32 40 50 64 30 38 45 16 20 25 32 40 16 20 25 32 40 Gripping force safety device {} AS IS without O.D. clamping I.D. clamping
GSM s Modular Design Versions of the series Type GSM Gripper type P Z W R Size 32 40 50 64 30 38 45 16 20 25 32 40 16 20 25 32 40 Gripping force safety device {} AS IS without O.D. clamping I.D. clamping
NASA SL - NU FRONTIERS. PDR presentation to the NASA Student Launch Review Panel
 NASA SL - NU FRONTIERS PDR presentation to the NASA Student Launch Review Panel 1 Agenda Launch Vehicle Overview Nose Cone Section Payload Section Lower Avionic Bay Section Booster Section Motor Selection
NASA SL - NU FRONTIERS PDR presentation to the NASA Student Launch Review Panel 1 Agenda Launch Vehicle Overview Nose Cone Section Payload Section Lower Avionic Bay Section Booster Section Motor Selection
FALL SEMESTER MECE 407 INNOVATIVE ENGINEERING ANALYSIS AND DESIGN PROJECT TOPICS
 2016-2017 FALL SEMESTER MECE 407 INNOVATIVE ENGINEERING ANALYSIS AND DESIGN PROJECT TOPICS 1- Design, construction and control of a cart-inverted pendulum control system: - There will be a cart and an
2016-2017 FALL SEMESTER MECE 407 INNOVATIVE ENGINEERING ANALYSIS AND DESIGN PROJECT TOPICS 1- Design, construction and control of a cart-inverted pendulum control system: - There will be a cart and an
4023 Senior Design Spring 2017
 4023 Senior Design Spring 2017 Trot n Trailer Senior Design James Collingsworth Konner Kay Skyler Shepherd Colten Leach Trey Minten About the Client Charles Machine Works Inc. produce various types of
4023 Senior Design Spring 2017 Trot n Trailer Senior Design James Collingsworth Konner Kay Skyler Shepherd Colten Leach Trey Minten About the Client Charles Machine Works Inc. produce various types of
Illustrated Catalog of Components
 Gears LLC 105 Webster St. Hanover Massachusetts 02339 Tel. 781 878 1512 Fax 781 878 6708 www.gearseds.com Illustrated Catalog of Components Engineering Tools not Toys The GEARS - IDS Invention and Design
Gears LLC 105 Webster St. Hanover Massachusetts 02339 Tel. 781 878 1512 Fax 781 878 6708 www.gearseds.com Illustrated Catalog of Components Engineering Tools not Toys The GEARS - IDS Invention and Design
Micro Dyne Motor Testing System
 Data Sheet Motor Testing System FEATURES DESIGNED SPECIFICALLY for miniature and micro s Torque: Easily convertible from 2.0 mn m to 4.0 mn m (0.28 oz in to 0.57 oz in) Speed: up to 100,000 rpm Power:
Data Sheet Motor Testing System FEATURES DESIGNED SPECIFICALLY for miniature and micro s Torque: Easily convertible from 2.0 mn m to 4.0 mn m (0.28 oz in to 0.57 oz in) Speed: up to 100,000 rpm Power:
Interim F.E.T.C.H. Report
 Interim F.E.T.C.H. Report Kora Barnes, Elliot Dickison, Brian Lee, Eric Johnston U n i v e r s i t y o f I d a h o M o s c o w, I d a h o 5 / 3 / 2 0 1 3 Contents Executive Summary... 2 Background... 3
Interim F.E.T.C.H. Report Kora Barnes, Elliot Dickison, Brian Lee, Eric Johnston U n i v e r s i t y o f I d a h o M o s c o w, I d a h o 5 / 3 / 2 0 1 3 Contents Executive Summary... 2 Background... 3
Introduction to Engineering Design 100. Foldable Shopping Cart
 1 Introduction to Engineering Design 100 Section 10 Team 7 Foldable Shopping Cart Submitted by: Nick Vuotto, Quoc Tran, Pete White, Mark Cecco (from left to right) Submitted to: Xinli Wu Spring 2014 2
1 Introduction to Engineering Design 100 Section 10 Team 7 Foldable Shopping Cart Submitted by: Nick Vuotto, Quoc Tran, Pete White, Mark Cecco (from left to right) Submitted to: Xinli Wu Spring 2014 2
UC Berkeley Space Technologies and Rocketry Preliminary Design Review Presentation. Access Control: CalSTAR Public Access
 UC Berkeley Space Technologies and Rocketry Preliminary Design Review Presentation Access Control: CalSTAR Public Access Agenda Airframe Propulsion Payload Recovery Safety Outreach Project Plan Airframe
UC Berkeley Space Technologies and Rocketry Preliminary Design Review Presentation Access Control: CalSTAR Public Access Agenda Airframe Propulsion Payload Recovery Safety Outreach Project Plan Airframe
Aditya.V Mechatronics, MGIT
 Unmanned Terrain with Rocker Bogie Suspension Aditya.V Mechatronics, MGIT Abstract: A rover is a vehicle for driving over rough terrain, especially one driven by remote control over extraterrestrial terrain.
Unmanned Terrain with Rocker Bogie Suspension Aditya.V Mechatronics, MGIT Abstract: A rover is a vehicle for driving over rough terrain, especially one driven by remote control over extraterrestrial terrain.
Chassis Concepts for the ExoMars Rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
Courtesy of CMA/Flodyne/Hydradyne Motion Control Hydraulic Pneumatic Electrical Mechanical (800)
") Courtesy of CMA/Flodyne/Hydradyne Motion Control Hydraulic Pneumatic Electrical Mechanical (8) 46-48 www.cmafh.com.7 Parallel Grippers- Miniature Series Double Wedge General purpose: This style gripper
Courtesy of CMA/Flodyne/Hydradyne Motion Control Hydraulic Pneumatic Electrical Mechanical (8) 46-48 www.cmafh.com.7 Parallel Grippers- Miniature Series Double Wedge General purpose: This style gripper
MFA Bundle Datasheet and user Guide
 MFA Bundle Datasheet and user Guide The MFA BUNDLE is our basic developer kit targeted for precision small-payload designs. The kit features four HE400 Hover Engines and all the control logic and actuation
MFA Bundle Datasheet and user Guide The MFA BUNDLE is our basic developer kit targeted for precision small-payload designs. The kit features four HE400 Hover Engines and all the control logic and actuation
SURVEYOR-H. Technical Data. Max speed 120 km/h. Engine power 7.2 hp. Powerplant Modified Zenoah G29E. Fuel tank volume 3.6 l
 rev. 28.10.14 * features & specifications are subject to change without notice. Technical Data Max speed 120 km/h Engine power 7.2 hp Powerplant Modified Zenoah G29E Fuel tank volume 3.6 l Payload with
rev. 28.10.14 * features & specifications are subject to change without notice. Technical Data Max speed 120 km/h Engine power 7.2 hp Powerplant Modified Zenoah G29E Fuel tank volume 3.6 l Payload with
PGS10 Series Pressroom Gripper System
 Unique, patented, modular design uses common components to reduce your purchase price and stocking requirements. Features a robust hardened steel chassis and grip force up to 450 lb at 80 psi (200kg at
Unique, patented, modular design uses common components to reduce your purchase price and stocking requirements. Features a robust hardened steel chassis and grip force up to 450 lb at 80 psi (200kg at
Mars 2018 Mission Status and Sample Acquisition Issues
 Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
Mars 2018 Mission Status and Sample Acquisition Issues Presentation to the Planetary Protection Subcommittee Charles Whetsel Manager, Advanced Studies and Program Architecture Office Christopher G. Salvo
Rocket Activity Advanced High- Power Paper Rockets
 Rocket Activity Advanced High- Power Paper Rockets Objective Design and construct advanced high-power paper rockets for specific flight missions. National Science Content Standards Unifying Concepts and
Rocket Activity Advanced High- Power Paper Rockets Objective Design and construct advanced high-power paper rockets for specific flight missions. National Science Content Standards Unifying Concepts and
Dreadnought s chassis is comprised of marine HDPE-High Density Polyethylene and 2 clear acrylic water-resistant ECT- Electrical Control Tubes.
 INNOVATORS ROBOTICS \ ABSTRACT This Technical document describes Innovators Dreadnought (powerful WWII battleship) ROV-Remotely Operated Vehicle that has been constructed for the 2017 MATE-Marine Advanced
INNOVATORS ROBOTICS \ ABSTRACT This Technical document describes Innovators Dreadnought (powerful WWII battleship) ROV-Remotely Operated Vehicle that has been constructed for the 2017 MATE-Marine Advanced
Wheels for a MEMS MicroVehicle
 EE245 Fall 2001 1 Wheels for a MEMS MicroVehicle Isaac Sever and Lloyd Lim sever@eecs.berkeley.edu, limlloyd@yahoo.com ABSTRACT Inch-worm motors achieve high linear displacements with high forces while
EE245 Fall 2001 1 Wheels for a MEMS MicroVehicle Isaac Sever and Lloyd Lim sever@eecs.berkeley.edu, limlloyd@yahoo.com ABSTRACT Inch-worm motors achieve high linear displacements with high forces while
AGE-XY. Application example. Compensation XY Compensation Units Light Loads. Workpiece weight 4 kg.. 10 kg. Sizes 050..
 AGE-XY Sizes 050.. 080 Workpiece weight 4 kg.. 10 kg Compensation paths XY ± 2.5 mm.. ± 4 mm Rotation ± 12.. ± 16 Application example Insertion unit for assembling a pin in a bore, in an approximately
AGE-XY Sizes 050.. 080 Workpiece weight 4 kg.. 10 kg Compensation paths XY ± 2.5 mm.. ± 4 mm Rotation ± 12.. ± 16 Application example Insertion unit for assembling a pin in a bore, in an approximately
Modular. Precise. Robust. AGE-S-XYZ Compensation Unit
 AGE-S Modular. Precise. Robust. AGE-S-XYZ Compensation Unit Compensation unit compensating in XY- and Z-direction Field of Application Palletizing, joining, and assembly of workpieces Advantages Your benefit
AGE-S Modular. Precise. Robust. AGE-S-XYZ Compensation Unit Compensation unit compensating in XY- and Z-direction Field of Application Palletizing, joining, and assembly of workpieces Advantages Your benefit
Manipulators. Example 1: The Claw
 Manipulators With these examples we will demonstrate some basic designs to accomplish each of the game piece challenges involved in the 2018 FIRST Global game Energy Impact to: 1. Collect fuel cubes and
Manipulators With these examples we will demonstrate some basic designs to accomplish each of the game piece challenges involved in the 2018 FIRST Global game Energy Impact to: 1. Collect fuel cubes and
A Geometrical Modular Design for Handling of LPG Cylinders using Nested Kinematic Robotic Gripper
 Indian Journal of Science and Technology, Vol 9(48), DOI: 10.17485/ijst/2016/v9i48/108474, December 2016 ISSN (Print) : 0974-6846 ISSN (Online) : 0974-5645 A Geometrical Modular Design for Handling of
Indian Journal of Science and Technology, Vol 9(48), DOI: 10.17485/ijst/2016/v9i48/108474, December 2016 ISSN (Print) : 0974-6846 ISSN (Online) : 0974-5645 A Geometrical Modular Design for Handling of
Auburn University Student Launch. PDR Presentation November 16, 2015
 Auburn University Student Launch PDR Presentation November 16, 2015 Project Aquila Vehicle Dimensions Total Length of 69.125 inches Inner Diameter of 5 inches Outer Diameter of 5.25 inches Estimated mass
Auburn University Student Launch PDR Presentation November 16, 2015 Project Aquila Vehicle Dimensions Total Length of 69.125 inches Inner Diameter of 5 inches Outer Diameter of 5.25 inches Estimated mass
Overview. Mission Overview Payload and Subsystems Rocket and Subsystems Management
 MIT ROCKET TEAM Overview Mission Overview Payload and Subsystems Rocket and Subsystems Management Purpose and Mission Statement Our Mission: Use a rocket to rapidly deploy a UAV capable of completing search
MIT ROCKET TEAM Overview Mission Overview Payload and Subsystems Rocket and Subsystems Management Purpose and Mission Statement Our Mission: Use a rocket to rapidly deploy a UAV capable of completing search
Folding Shopping Cart Design Report
 Folding Shopping Cart Design Report EDSGN 100 Section 010, Team #4 Submission Date- 10/28/2013 Group Image with Prototype Submitted by: Arafat Hossain, Mack Burgess, Jake Covell, and Connor Pechko (in
Folding Shopping Cart Design Report EDSGN 100 Section 010, Team #4 Submission Date- 10/28/2013 Group Image with Prototype Submitted by: Arafat Hossain, Mack Burgess, Jake Covell, and Connor Pechko (in
Experimental Validation of a Scalable Mobile Robot for Traversing Ferrous Pipelines
 Project Number: MQP TP1- IPG1 Experimental Validation of a Scalable Mobile Robot for Traversing Ferrous Pipelines A Major Qualifying Project (MQP) Submitted to the Faculty of WORCESTER POYTECHNIC INSTITUTE
Project Number: MQP TP1- IPG1 Experimental Validation of a Scalable Mobile Robot for Traversing Ferrous Pipelines A Major Qualifying Project (MQP) Submitted to the Faculty of WORCESTER POYTECHNIC INSTITUTE
Manipulators for FIRST FRC Robotics
 Manipulators for FIRST FRC Robotics FIRST Fare 2017 Bruce Whitefield Mentor, Team 2471 Manipulate What? Game pieces come in many sizes and shapes Manipulate How? Game objectives change each year Lift Dump
Manipulators for FIRST FRC Robotics FIRST Fare 2017 Bruce Whitefield Mentor, Team 2471 Manipulate What? Game pieces come in many sizes and shapes Manipulate How? Game objectives change each year Lift Dump
Reliable Reach. Robotics Unit Lesson 4. Overview
 Robotics Unit Lesson 4 Reliable Reach Overview Robots are used not only to transport things across the ground, but also as automatic lifting devices. In the mountain rescue scenario, the mountaineers are
Robotics Unit Lesson 4 Reliable Reach Overview Robots are used not only to transport things across the ground, but also as automatic lifting devices. In the mountain rescue scenario, the mountaineers are
Item Number Item Name MSRP MAP
 Kits and RTRs 4021 RC12R6-FT KIT $439.99 $285.99 7063 ProSC 4x4 RTR $529.99 $334.99 7063C ProSC 4X4 RTR LiPo Combo $599.99 $379.99 8023 RC10F6 Factory Team Kit $499.99 $339.99 20150 SC28 RTR LUCAS OIL
Kits and RTRs 4021 RC12R6-FT KIT $439.99 $285.99 7063 ProSC 4x4 RTR $529.99 $334.99 7063C ProSC 4X4 RTR LiPo Combo $599.99 $379.99 8023 RC10F6 Factory Team Kit $499.99 $339.99 20150 SC28 RTR LUCAS OIL
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units