Control of a Multi Function Wheelchair for Disabled/Elderly Mobility
|
|
|
- Owen Randell Parrish
- 5 years ago
- Views:
Transcription

1 Control of a Multi Function Wheelchair for Disabled/Elderly Mobility Nor Maniha Abdul Ghani Dr. Osman Tokhi Department of Automatic Control and Systems Engineering The University of Sheffield


![design, incorporate many wheels and of large size [1-6].](/docs-images/81/82679851/images/2-3.jpg "Reliance on personal assistant or handrail to perform stair")
![climbing tasks [7]. Lack of stability control assessment [1-7].](/docs-images/81/82679851/images/2-4.jpg "Use conventional control methods, PID [7], PLC [5], FLC [4] but")
2 Introduction/Problems Sunwa, 26 WL-16RII, 25 Wheelchair.q, 29 ibot, 21 Common mobility assistive techniques and recent advances in curb and stair climbing devices; crawler, leg, hybrid, wheeled types suffer from certain issues:- Complex design, incorporate many wheels and of large size [1-6]. Reliance on personal assistant or handrail to perform stair climbing tasks [7]. Lack of stability control assessment [1-7]. Use conventional control methods, PID [7], PLC [5], FLC [4] but not to extensive levels. Slide 2
 manoeuvres.")
3 Objectives/Methodology To develop a simple and compact wheelchair mechanism for indoor usage. To develop a suitable control strategies for climbing mechanism and ensure stability of the whole wheelchair. To design a transformation mechanism (sit and stand) manoeuvres. To apply bio inspired algorithm for optimizing the parameters of developed controller. A cluster/link rotation mechanism developed in VN to perform stair climbing by rotating a cluster to bring up the rear wheels over the front ones while maintaining stability of the overall system without slipping or tipping over the staircase. A humanoid model developed as a rigid body in Visual Nastran [8-9] with 1.5 m in height and weight of 71 kg, and a staircase of slope 29 o and steps height, h of.185m, depth, d of.335m and minimum width, w of.762m [1]. Slide 3


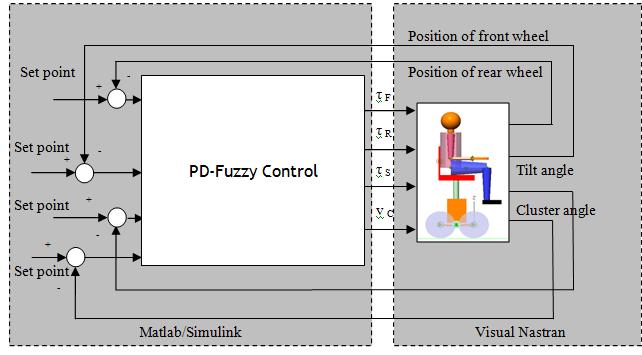


4 Ascending/Descending Stairs Control (DPMFLC) DPMFLC Slide 4
 Distance 2 (m) Torque (Nm) Rear axle position(m).5.3.4 Results 1 st step.2.1 2 4 6.3.2.1 2 4 6 1.8 1 5-5 +1N -1N.6.4.2 +1N -1N.8.6.4 +1N -1N -1 1 2 3 4 5 6 2 2 nd step -.")
5 Angular position of link for 1st step (degree) Angular position of link for 2nd step (degree) Tilt angle (degree) Distance 1 (m) Front axle position(m) Yaw angle (degree).4 Torque (Nm) Distance 2 (m) Torque (Nm) Rear axle position(m) Results 1 st step N -1N N -1N N -1N nd step Time in (s) N -1N 85 +1N -1N N -1N Train of Positive and Negative Impulse Disturbances Slide 5



6 Conclusion & Future Work Conclusion A DPMFLC has been implemented to perform stair ascending/descending task with an automatic mode wheelchair system. It has been demonstrated that the control system is able to perform effectively in order to ensure stability of the maneuvering tasks. The designed controller is robust to positive and negative impulse disturbances. Future Work Transform the wheelchair from sitting to standing position. Investigate bio-inspired optimization to optimize the parameter of developed controller. Slide 6
7 References [1] Sunwa Co.Ltd (26). (1 st April 212), [Available from] [2] Top Chair, (23). The first stair-climbing powered wheelchair, (1 st April 212), [Available from] [3] Lawn, M. J., Sakai, T., Kuroiwa, M. & Ishimatsu, T. (21). Development and practical application of a stair climbing wheelchair in Nagasaki. Journal of HWRS-ERC, 2, [4] Teng, Y., Wang, T., Yao, C. & Li, X. (21). The Research of Tension Optimal Estimation and Stair-Climbing Ability of Transformation Wheelchair Robot. Proceeding of 29 th Chinese Control Conference, [5] Noborot (212). Robotic vehicle could lead to stair-climbing wheelchair by 217, (6 th November 212), [Available from] [6] Nakajima, S. (21). Proposal for step-up gait of RT-Mover, a four wheel-type mobile robot for rough terrain with simple leg mechanism. Proceeding of IEEE International Conference on Robotics and Biomimetics, [7] Johnson & Johnson Company (21): Independence Ibot mobility system. Johnson & Johnson Company. Accessed 1 April 212. [8] Wang, S.L. (21). Motion simulation with working model 2D and MSC. Visual Nastran 4D. J. Comput. Soft. Engin. 1 (2), [9] Winter, D.A. (199). Biomechanics and Motor Control of Human Movement. Wiley-Interscience, New York. [1] Canadian Centre For Occupational Safety And Health ( 21). (28 th November 212), [Available from] Slide 7
Modelling and Control of a Reconfigurable Multipurpose Wheelchair for Elderly/Disabled Mobility
 Modelling and Control of a Reconfigurable Multipurpose Wheelchair for Elderly/Disabled Mobility A thesis submitted to the University of Sheffield for the degree of Doctor of Philosophy By Nor Maniha Abdul
Modelling and Control of a Reconfigurable Multipurpose Wheelchair for Elderly/Disabled Mobility A thesis submitted to the University of Sheffield for the degree of Doctor of Philosophy By Nor Maniha Abdul
Enhancing Wheelchair Mobility Through Dynamics Mimicking
 Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
A Prototype of a Stair-Climbing System for a Wheelchair
 A Prototype of a Stair-Climbing System for a Wheelchair Ekachai Chaichanasiri* and Teerapol Puangumpan Department of Mechanical Engineering, Faculty of Engineering, Mahidol University, Nakornpathom, Thailand
A Prototype of a Stair-Climbing System for a Wheelchair Ekachai Chaichanasiri* and Teerapol Puangumpan Department of Mechanical Engineering, Faculty of Engineering, Mahidol University, Nakornpathom, Thailand
Simulation and control of multipurpose wheelchair for disabled/elderly mobility
 Galley Proof 8/7/26; 6:25 File: ica -ica526.tex; BOKCTP/xhs p. Integrated Computer-Aided Engineering - (26) 7 DOI.3233/ICA-6526 IOS Press Simulation and control of multipurpose wheelchair for disabled/elderly
Galley Proof 8/7/26; 6:25 File: ica -ica526.tex; BOKCTP/xhs p. Integrated Computer-Aided Engineering - (26) 7 DOI.3233/ICA-6526 IOS Press Simulation and control of multipurpose wheelchair for disabled/elderly
New Low-Cost Design of Staircase Climbing Wheelchair
 New Low-Cost Design of Staircase Climbing Wheelchair Prof. Girish Sudhir Modak Prof. Dr. Manmohan M. Bhoomkar Assist.Professor of Mechanical Engineering Associate Professor of Mechanical Engineering PVG
New Low-Cost Design of Staircase Climbing Wheelchair Prof. Girish Sudhir Modak Prof. Dr. Manmohan M. Bhoomkar Assist.Professor of Mechanical Engineering Associate Professor of Mechanical Engineering PVG
Vehicle Steering Control with Human-in-the-Loop
 Vehicle Steering Control with Human-in-the-Loop Mengzhe Huang, Weinan Gao, Zhong-Ping Jiang(IEEE/IFAC Fellow) Email: {m.huang, weinan.gao, zjiang}@nyu.edu} Control and Networks Lab, Department of Electrical
Vehicle Steering Control with Human-in-the-Loop Mengzhe Huang, Weinan Gao, Zhong-Ping Jiang(IEEE/IFAC Fellow) Email: {m.huang, weinan.gao, zjiang}@nyu.edu} Control and Networks Lab, Department of Electrical
Help choosing the right powered wheelchair for you
 Help choosing the right powered wheelchair for you Components Frame - type (page 2) Seat - general information (page 2) Backrests - dimensions, folding, non-folding, semi or fully reclining (page 2) Wheels
Help choosing the right powered wheelchair for you Components Frame - type (page 2) Seat - general information (page 2) Backrests - dimensions, folding, non-folding, semi or fully reclining (page 2) Wheels
Boombot: Low Friction Coefficient Stair Climbing Robot Using Rotating Boom and Weight Redistribution
 Boombot: Low Friction Coefficient Stair Climbing Robot Using Rotating Boom and Weight Redistribution Sartaj Singh and Ramachandra K Abstract Boombot comprising four wheels and a rotating boom in the middle
Boombot: Low Friction Coefficient Stair Climbing Robot Using Rotating Boom and Weight Redistribution Sartaj Singh and Ramachandra K Abstract Boombot comprising four wheels and a rotating boom in the middle
SPEED AND TORQUE CONTROL OF AN INDUCTION MOTOR WITH ANN BASED DTC
 SPEED AND TORQUE CONTROL OF AN INDUCTION MOTOR WITH ANN BASED DTC Fatih Korkmaz Department of Electric-Electronic Engineering, Çankırı Karatekin University, Uluyazı Kampüsü, Çankırı, Turkey ABSTRACT Due
SPEED AND TORQUE CONTROL OF AN INDUCTION MOTOR WITH ANN BASED DTC Fatih Korkmaz Department of Electric-Electronic Engineering, Çankırı Karatekin University, Uluyazı Kampüsü, Çankırı, Turkey ABSTRACT Due
User Centric Designed Mechanism For stairs-climbing Wheelchair (manual)
") User Centric Designed Mechanism For stairs-climbing Wheelchair (manual) Shanu Sharma, J Ramkumar, Shatrupa Thakurta Roy Abstract One of the basic problems of user on manual wheelchair is overcoming architectural
User Centric Designed Mechanism For stairs-climbing Wheelchair (manual) Shanu Sharma, J Ramkumar, Shatrupa Thakurta Roy Abstract One of the basic problems of user on manual wheelchair is overcoming architectural
Sponsors. Rob Parkinson. Technical Head - Driveline and Transmission Systems Ricardo UK Ltd
 Sponsors Rob Parkinson Technical Head - Driveline and Transmission Systems Ricardo UK Ltd Rapid identification of transmission layouts for lowest vehicle energy consumption Rob Parkinson Technical Head,
Sponsors Rob Parkinson Technical Head - Driveline and Transmission Systems Ricardo UK Ltd Rapid identification of transmission layouts for lowest vehicle energy consumption Rob Parkinson Technical Head,
Exoskeleton Robot DesignBased on Multi-body Dynamics Simulation
 Exoskeleton Robot DesignBased on Multi-body Dynamics Simulation Chao Wang a, Guozhu Duan, Jie Xiao China North Vehicle Research Institute Beijing, China acwang21@163.com Abstract In order to implement
Exoskeleton Robot DesignBased on Multi-body Dynamics Simulation Chao Wang a, Guozhu Duan, Jie Xiao China North Vehicle Research Institute Beijing, China acwang21@163.com Abstract In order to implement
Practical Training Session
 Practical Training Session 12 Practical Training Session When evacuation is required the Dedicated Operator/Escort should remove the dust cover and lift the chair from the wall or from its cabinet. The
Practical Training Session 12 Practical Training Session When evacuation is required the Dedicated Operator/Escort should remove the dust cover and lift the chair from the wall or from its cabinet. The
METHOD FOR TESTING STEERABILITY AND STABILITY OF MILITARY VEHICLES MOTION USING SR60E STEERING ROBOT
 Journal of KONES Powertrain and Transport, Vol. 18, No. 1 11 METHOD FOR TESTING STEERABILITY AND STABILITY OF MILITARY VEHICLES MOTION USING SR6E STEERING ROBOT Wodzimierz Kupicz, Stanisaw Niziski Military
Journal of KONES Powertrain and Transport, Vol. 18, No. 1 11 METHOD FOR TESTING STEERABILITY AND STABILITY OF MILITARY VEHICLES MOTION USING SR6E STEERING ROBOT Wodzimierz Kupicz, Stanisaw Niziski Military
Fuzzy based Adaptive Control of Antilock Braking System
 Fuzzy based Adaptive Control of Antilock Braking System Ujwal. P Krishna. S M.Tech Mechatronics, Asst. Professor, Mechatronics VIT University, Vellore, India VIT university, Vellore, India Abstract-ABS
Fuzzy based Adaptive Control of Antilock Braking System Ujwal. P Krishna. S M.Tech Mechatronics, Asst. Professor, Mechatronics VIT University, Vellore, India VIT university, Vellore, India Abstract-ABS
Computer Aided Transient Stability Analysis
 Journal of Computer Science 3 (3): 149-153, 2007 ISSN 1549-3636 2007 Science Publications Corresponding Author: Computer Aided Transient Stability Analysis Nihad M. Al-Rawi, Afaneen Anwar and Ahmed Muhsin
Journal of Computer Science 3 (3): 149-153, 2007 ISSN 1549-3636 2007 Science Publications Corresponding Author: Computer Aided Transient Stability Analysis Nihad M. Al-Rawi, Afaneen Anwar and Ahmed Muhsin
Analysis of Structure and Process of a Robot with Obstacles
 Abstract Analysis of Structure and Process of a Robot with Obstacles Xuebin Liu a, Shiying Zhao, Lin Chang, Zhongjiang Tian, Wentao Tan College of Mechanical and Electronic Engineering, Shandong University
Abstract Analysis of Structure and Process of a Robot with Obstacles Xuebin Liu a, Shiying Zhao, Lin Chang, Zhongjiang Tian, Wentao Tan College of Mechanical and Electronic Engineering, Shandong University
An Autonomous Two Wheel Based Self- Balancing Robot Using Arduino
 www.ijaceeonline.com ISSN: 2456-3935 An Autonomous Two Wheel Based Self- Balancing Robot Using Arduino Md. Abdullah Al Ahasan Lecturer, Department of Computer Science and Engineering, Bangladesh University
www.ijaceeonline.com ISSN: 2456-3935 An Autonomous Two Wheel Based Self- Balancing Robot Using Arduino Md. Abdullah Al Ahasan Lecturer, Department of Computer Science and Engineering, Bangladesh University
Design and analysis of a wheel-legged hybrid locomotion mechanism
 Research Article Design and analysis of a wheel-legged hybrid locomotion mechanism Advances in Mechanical Engineering 205, Vol. 7() 0 Ó The Author(s) 205 DOI: 0.77/687840566908 aime.sagepub.com Change
Research Article Design and analysis of a wheel-legged hybrid locomotion mechanism Advances in Mechanical Engineering 205, Vol. 7() 0 Ó The Author(s) 205 DOI: 0.77/687840566908 aime.sagepub.com Change
Parameters Matching and Simulation on a Hybrid Power System for Electric Bulldozer Hong Wang 1, Qiang Song 2,, Feng-Chun SUN 3 and Pu Zeng 4
 2nd International Conference on Electronic & Mechanical Engineering and Information Technology (EMEIT-2012) Parameters Matching and Simulation on a Hybrid Power System for Electric Bulldozer Hong Wang
2nd International Conference on Electronic & Mechanical Engineering and Information Technology (EMEIT-2012) Parameters Matching and Simulation on a Hybrid Power System for Electric Bulldozer Hong Wang
Evolution of Wheelchair.q, a Stair-climbing Wheelchair
 The 14th IFToMM World Congress, Taipei, Taiwan, October 25-30, 2015 DOI Number: 10.6567/IFToMM.14TH.WC.OS13.032 Evolution of Wheelchair.q, a Stair-climbing Wheelchair G. Quaglia 1 W.Franco 2 M. Nisi 3
The 14th IFToMM World Congress, Taipei, Taiwan, October 25-30, 2015 DOI Number: 10.6567/IFToMM.14TH.WC.OS13.032 Evolution of Wheelchair.q, a Stair-climbing Wheelchair G. Quaglia 1 W.Franco 2 M. Nisi 3
Control and Simulation of Semi-Active Suspension System using PID Controller for Automobiles under LABVIEW Simulink
 International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2017 INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Control
International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2017 INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Control
Design and Fabrication of Pedal Powered Stair Climbing Trolley
 Design and Fabrication of Pedal Powered Stair Climbing Trolley C.Gnanavel 1, Dr. S. Sivaganesan 2, T.Gopalakrishnan, C. Vignesh 3, S. Sarath 4, Md. Mansoor 5 1,3 Assistant Professor, Department Of Mechanical
Design and Fabrication of Pedal Powered Stair Climbing Trolley C.Gnanavel 1, Dr. S. Sivaganesan 2, T.Gopalakrishnan, C. Vignesh 3, S. Sarath 4, Md. Mansoor 5 1,3 Assistant Professor, Department Of Mechanical
Contents. Product information. scalamobil S35 scalacombi S36. Overview 52. Product advantages 53. Product components 54. Scope of delivery 55
 Product information Contents scalamobil S35 scalacombi S36 Overview 52 Product advantages 53 Product components 54 Scope of delivery 55 2 Accessories 56 scalacombi S36 58 scalachair X3 59 scalachair X3
Product information Contents scalamobil S35 scalacombi S36 Overview 52 Product advantages 53 Product components 54 Scope of delivery 55 2 Accessories 56 scalacombi S36 58 scalachair X3 59 scalachair X3
Design and Fabrication of Motorized Stairs Climbing Vehicle
 Design and Fabrication of Motorized Stairs Climbing Vehicle Suraj Bhatta Department of Mechanical Engineering The Oxford College of Engineering Bangalore, Karnataka, India Saujanya Shah Department of Mechanical
Design and Fabrication of Motorized Stairs Climbing Vehicle Suraj Bhatta Department of Mechanical Engineering The Oxford College of Engineering Bangalore, Karnataka, India Saujanya Shah Department of Mechanical
Design and Control of Lab-Scale Variable Speed Wind Turbine Simulator using DFIG. Seung-Ho Song, Ji-Hoon Im, Hyeong-Jin Choi, Tae-Hyeong Kim
 Design and Control of Lab-Scale Variable Speed Wind Turbine Simulator using DFIG Seung-Ho Song, Ji-Hoon Im, Hyeong-Jin Choi, Tae-Hyeong Kim Dept. of Electrical Engineering Kwangwoon University, Korea Summary
Design and Control of Lab-Scale Variable Speed Wind Turbine Simulator using DFIG Seung-Ho Song, Ji-Hoon Im, Hyeong-Jin Choi, Tae-Hyeong Kim Dept. of Electrical Engineering Kwangwoon University, Korea Summary
ANALYSIS ON MECHANICAL PARAMETERS OF LUNAR ROVER WHEEL
 ANALYSIS ON MECHANICAL PARAMETERS OF LUNAR ROVER WHEEL 1,2 DAWEI JIN, 1 JIANQIAO LI, 3 JIANXIN ZHU, 3 CHUNHUA ZHANG 1 Key laboratary of Bionic Engineering (Ministry of Education), Jilin University, Changchu
ANALYSIS ON MECHANICAL PARAMETERS OF LUNAR ROVER WHEEL 1,2 DAWEI JIN, 1 JIANQIAO LI, 3 JIANXIN ZHU, 3 CHUNHUA ZHANG 1 Key laboratary of Bionic Engineering (Ministry of Education), Jilin University, Changchu
Electrical Energy Regeneration of Hydraulic-Split Power Transmission System Using Fuel Efficient Controller
 Electrical Energy Regeneration of Hydraulic-Split Power Transmission System Using Fuel Efficient Controller M. Bhola, R. Sreeharsha N. Kumar ** ** Presenter 3/19/2018 Kumar, N. 1 Presentation Outline 1
Electrical Energy Regeneration of Hydraulic-Split Power Transmission System Using Fuel Efficient Controller M. Bhola, R. Sreeharsha N. Kumar ** ** Presenter 3/19/2018 Kumar, N. 1 Presentation Outline 1
FABRICATION OF STAIR CLIMBER MATERIAL HANDLING SYSTEM FOR SMALL SCALE INDUSTRY
 FABRICATION OF STAIR CLIMBER MATERIAL HANDLING SYSTEM FOR SMALL SCALE INDUSTRY Vishal S. Tighare 1, Achal P. Wankhade 2, Ravi N. Tirke 3, Shubham V.Wankhade 4 Guided by : Prof. A. M. Hatwar 1,2,3,4 Mechanical
FABRICATION OF STAIR CLIMBER MATERIAL HANDLING SYSTEM FOR SMALL SCALE INDUSTRY Vishal S. Tighare 1, Achal P. Wankhade 2, Ravi N. Tirke 3, Shubham V.Wankhade 4 Guided by : Prof. A. M. Hatwar 1,2,3,4 Mechanical
Development of Engine Clutch Control for Parallel Hybrid
 EVS27 Barcelona, Spain, November 17-20, 2013 Development of Engine Clutch Control for Parallel Hybrid Vehicles Joonyoung Park 1 1 Hyundai Motor Company, 772-1, Jangduk, Hwaseong, Gyeonggi, 445-706, Korea,
EVS27 Barcelona, Spain, November 17-20, 2013 Development of Engine Clutch Control for Parallel Hybrid Vehicles Joonyoung Park 1 1 Hyundai Motor Company, 772-1, Jangduk, Hwaseong, Gyeonggi, 445-706, Korea,
New Capacity Modulation Algorithm for Linear Compressor
 Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 010 New Capacity Modulation Algorithm for Linear Compressor Jaeyoo Yoo Sungho Park Hyuk
Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 010 New Capacity Modulation Algorithm for Linear Compressor Jaeyoo Yoo Sungho Park Hyuk
New Intelligent Transmission Concept for Hybrid Mobile Robot Speed Control
 ICOM 0 Mir-asiri,.; Hussaini, S. / ew Intelligent Transmission Concept for Hybrid Mobile Robot Speed Control, pp. 9-63, International Journal of Advanced Robotic Systems, Volume, umber 3 (00), ISS 179-8806
ICOM 0 Mir-asiri,.; Hussaini, S. / ew Intelligent Transmission Concept for Hybrid Mobile Robot Speed Control, pp. 9-63, International Journal of Advanced Robotic Systems, Volume, umber 3 (00), ISS 179-8806
DESIGNING AND ANALYSING STAIR CASE LIFT SYSTEM
 DESIGNING AND ANALYSING STAIR CASE LIFT SYSTEM Timur Choban Khidir 1, Abbas Mohammed Ismael 2 & Ayaz Aydin Abduljabbar 3 1, 2, 3 Kirkuk University / College of Engineering - Mechanical Department, IRAQ
DESIGNING AND ANALYSING STAIR CASE LIFT SYSTEM Timur Choban Khidir 1, Abbas Mohammed Ismael 2 & Ayaz Aydin Abduljabbar 3 1, 2, 3 Kirkuk University / College of Engineering - Mechanical Department, IRAQ
Politecnico di Torino. Porto Institutional Repository
 Politecnico di Torino Porto Institutional Repository [Article] Wheelchair.q, a motorized wheelchair with stair climbing ability Original Citation: Quaglia G.; Franco W.; Oderio R. (2011). Wheelchair.q,
Politecnico di Torino Porto Institutional Repository [Article] Wheelchair.q, a motorized wheelchair with stair climbing ability Original Citation: Quaglia G.; Franco W.; Oderio R. (2011). Wheelchair.q,
Modeling and Simulation of BLDC Motor using MATLAB/SIMULINK Environment
 Modeling and Simulation of BLDC Motor using MATLAB/SIMULINK Environment SudhanshuMitra 1, R.SaidaNayak 2, Ravi Prakash 3 1 Electrical Engineering Department, Manit Bhopal, India 2 Electrical Engineering
Modeling and Simulation of BLDC Motor using MATLAB/SIMULINK Environment SudhanshuMitra 1, R.SaidaNayak 2, Ravi Prakash 3 1 Electrical Engineering Department, Manit Bhopal, India 2 Electrical Engineering
Modelling and Simulation of a Passenger Car for Comfort Evaluation
 Modelling and Simulation of a Passenger Car for Comfort Evaluation Vivek Kumar Department of Mechanical Engineering, Sant Longowal Institute of Engineering and Technology, Sangrur, India Abstract: Vehicle
Modelling and Simulation of a Passenger Car for Comfort Evaluation Vivek Kumar Department of Mechanical Engineering, Sant Longowal Institute of Engineering and Technology, Sangrur, India Abstract: Vehicle
Segway with Human Control and Wireless Control
 Review Paper Abstract Research Journal of Engineering Sciences E- ISSN 2278 9472 Segway with Human Control and Wireless Control Sanjay Kumar* and Manisha Sharma and Sourabh Yadav Dept. of Electronics &
Review Paper Abstract Research Journal of Engineering Sciences E- ISSN 2278 9472 Segway with Human Control and Wireless Control Sanjay Kumar* and Manisha Sharma and Sourabh Yadav Dept. of Electronics &
Kazuaki Sakai, Toshihiko Yasuda, and Katsuyuki Tanaka, Member, IEEE
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Power Assist Effects of a New Type Assist Unit in a One Hand Drive Wheelchair with a Triple
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Power Assist Effects of a New Type Assist Unit in a One Hand Drive Wheelchair with a Triple
Analysis and Design of Independent Pitch Control System
 5th International Conference on Civil Engineering and Transportation (ICCET 2015) Analysis and Design of Independent Pitch Control System CHU Yun Kai1, a *, MIAO Qiang2,b, DU Jin Song1,c, LIU Yi Yang 1,d
5th International Conference on Civil Engineering and Transportation (ICCET 2015) Analysis and Design of Independent Pitch Control System CHU Yun Kai1, a *, MIAO Qiang2,b, DU Jin Song1,c, LIU Yi Yang 1,d
MOTORIZED WHEELCHAIR TO TRANSPOSE OBSTACLES IN CHANGED LAND PLANS
 MOTORIZED WHEELCHAIR TO TRANSPOSE OBSTACLES IN CHANGED LAND PLANS Samuel Trautvein Universidade Paulista, Engenharia de Automação e Controle (Mecatrônica) Av. Jucelino Kubitschek de Oliveira, s/n São José
MOTORIZED WHEELCHAIR TO TRANSPOSE OBSTACLES IN CHANGED LAND PLANS Samuel Trautvein Universidade Paulista, Engenharia de Automação e Controle (Mecatrônica) Av. Jucelino Kubitschek de Oliveira, s/n São José
Structure Design and Performance Analysis for Locomotion System of the Field Exploration Robot
 Structure Design and Performance Analysis for Locomotion System of the Field Exploration Robot SHANG WEIYAN QIU FAJU YANG CHAOZHEN ZHENGSHUHUA Department of mechanical engineering Ningbo University of
Structure Design and Performance Analysis for Locomotion System of the Field Exploration Robot SHANG WEIYAN QIU FAJU YANG CHAOZHEN ZHENGSHUHUA Department of mechanical engineering Ningbo University of
Steering Dynamics of Tilting Narrow Track Vehicle with Passive Front Wheel Design
 Journal of Physics: Conference Series PAPER OPEN ACCESS Steering Dynamics of Tilting Narrow Track Vehicle with Passive Front Wheel Design To cite this article: Jeffrey Too Chuan TAN et al 6 J. Phys.: Conf.
Journal of Physics: Conference Series PAPER OPEN ACCESS Steering Dynamics of Tilting Narrow Track Vehicle with Passive Front Wheel Design To cite this article: Jeffrey Too Chuan TAN et al 6 J. Phys.: Conf.
Test Bed 1 Energy Efficient Displacement-Controlled Hydraulic Hybrid Excavator
 Test Bed 1 Energy Efficient Displacement-Controlled Hydraulic Hybrid Excavator Enrique Busquets Monika Ivantysynova October 7, 2015 Maha Fluid Power Research Center Purdue University, West Lafayette, IN,
Test Bed 1 Energy Efficient Displacement-Controlled Hydraulic Hybrid Excavator Enrique Busquets Monika Ivantysynova October 7, 2015 Maha Fluid Power Research Center Purdue University, West Lafayette, IN,
Semi-Active Suspension for an Automobile
 Semi-Active Suspension for an Automobile Pavan Kumar.G 1 Mechanical Engineering PESIT Bangalore, India M. Sambasiva Rao 2 Mechanical Engineering PESIT Bangalore, India Abstract Handling characteristics
Semi-Active Suspension for an Automobile Pavan Kumar.G 1 Mechanical Engineering PESIT Bangalore, India M. Sambasiva Rao 2 Mechanical Engineering PESIT Bangalore, India Abstract Handling characteristics
Research on Skid Control of Small Electric Vehicle (Effect of Velocity Prediction by Observer System)
") Proc. Schl. Eng. Tokai Univ., Ser. E (17) 15-1 Proc. Schl. Eng. Tokai Univ., Ser. E (17) - Research on Skid Control of Small Electric Vehicle (Effect of Prediction by Observer System) by Sean RITHY *1
Proc. Schl. Eng. Tokai Univ., Ser. E (17) 15-1 Proc. Schl. Eng. Tokai Univ., Ser. E (17) - Research on Skid Control of Small Electric Vehicle (Effect of Prediction by Observer System) by Sean RITHY *1
Fuzzy logic controlled Bi-directional DC-DC Converter for Electric Vehicle Applications
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 12, Issue 3 Ver. IV (May June 2017), PP 51-55 www.iosrjournals.org Fuzzy logic controlled
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 12, Issue 3 Ver. IV (May June 2017), PP 51-55 www.iosrjournals.org Fuzzy logic controlled
One-Cycle Average Torque Control of Brushless DC Machine Drive Systems
 One-Cycle Average Torque Control of Brushless DC Machine Drive Systems Najma P.I. 1, Sakkeer Hussain C.K. 2 P.G. Student, Department of Electrical and Electronics Engineering, MEA Engineering College,
One-Cycle Average Torque Control of Brushless DC Machine Drive Systems Najma P.I. 1, Sakkeer Hussain C.K. 2 P.G. Student, Department of Electrical and Electronics Engineering, MEA Engineering College,
International Conference on Advances in Energy and Environmental Science (ICAEES 2015)
") International Conference on Advances in Energy and Environmental Science (ICAEES 2015) Design and Simulation of EV Charging Device Based on Constant Voltage-Constant Current PFC Double Closed-Loop Controller
International Conference on Advances in Energy and Environmental Science (ICAEES 2015) Design and Simulation of EV Charging Device Based on Constant Voltage-Constant Current PFC Double Closed-Loop Controller
Dynamic and Decoupling Analysis of the Bogie with Single EMS Modules for Low-speed Maglev Train
 , pp.83-88 http://dx.doi.org/10.14257/astl.2016. Dynamic and Decoupling Analysis of the Bogie with Single EMS Modules for Low-speed Maglev Train Yougang Sun* 1, 2, Wanli Li 1, Daofang Chang 2, Yuanyuan
, pp.83-88 http://dx.doi.org/10.14257/astl.2016. Dynamic and Decoupling Analysis of the Bogie with Single EMS Modules for Low-speed Maglev Train Yougang Sun* 1, 2, Wanli Li 1, Daofang Chang 2, Yuanyuan
Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil
 Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil By Brian Edwards, Vehicle Dynamics Group, Pratt and Miller Engineering, USA 22 Engineering Reality Magazine Multibody Dynamics
Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil By Brian Edwards, Vehicle Dynamics Group, Pratt and Miller Engineering, USA 22 Engineering Reality Magazine Multibody Dynamics
Active Suspensions For Tracked Vehicles
 Active Suspensions For Tracked Vehicles Y.G.Srinivasa, P. V. Manivannan 1, Rajesh K 2 and Sanjay goyal 2 Precision Engineering and Instrumentation Lab Indian Institute of Technology Madras Chennai 1 PEIL
Active Suspensions For Tracked Vehicles Y.G.Srinivasa, P. V. Manivannan 1, Rajesh K 2 and Sanjay goyal 2 Precision Engineering and Instrumentation Lab Indian Institute of Technology Madras Chennai 1 PEIL
Integrated Control Strategy for Torque Vectoring and Electronic Stability Control for in wheel motor EV
 EVS27 Barcelona, Spain, November 17-20, 2013 Integrated Control Strategy for Torque Vectoring and Electronic Stability Control for in wheel motor EV Haksun Kim 1, Jiin Park 2, Kwangki Jeon 2, Sungjin Choi
EVS27 Barcelona, Spain, November 17-20, 2013 Integrated Control Strategy for Torque Vectoring and Electronic Stability Control for in wheel motor EV Haksun Kim 1, Jiin Park 2, Kwangki Jeon 2, Sungjin Choi
INTERNATIONAL JOURNAL OF ELECTRICAL ENGINEERING & TECHNOLOGY (IJEET)
") INTERNATIONAL JOURNAL OF ELECTRICAL ENGINEERING & TECHNOLOGY (IJEET) Proceedings of the 2 nd International Conference on Current Trends in Engineering and Management ICCTEM -2014 ISSN 0976 6545(Print)
INTERNATIONAL JOURNAL OF ELECTRICAL ENGINEERING & TECHNOLOGY (IJEET) Proceedings of the 2 nd International Conference on Current Trends in Engineering and Management ICCTEM -2014 ISSN 0976 6545(Print)
Fuzzy Logic Controller for BLDC Permanent Magnet Motor Drives
 International Journal of Electrical & Computer Sciences IJECS-IJENS Vol: 11 No: 02 12 Fuzzy Logic Controller for BLDC Permanent Magnet Motor Drives Tan Chee Siong, Baharuddin Ismail, Siti Fatimah Siraj,
International Journal of Electrical & Computer Sciences IJECS-IJENS Vol: 11 No: 02 12 Fuzzy Logic Controller for BLDC Permanent Magnet Motor Drives Tan Chee Siong, Baharuddin Ismail, Siti Fatimah Siraj,
Technology for The Aid of Quadriplegics
 Technology for The Aid of Quadriplegics Ramanpreet Kaur 1,a, Satvir Singh 1,b, Dr. Bikrampal Kaur 2 1Asstt. Prof.,ECE Department,CEC Landran,Mohali 2 Prof., IT Department, CEC Landran,Mohali E-mail: a
Technology for The Aid of Quadriplegics Ramanpreet Kaur 1,a, Satvir Singh 1,b, Dr. Bikrampal Kaur 2 1Asstt. Prof.,ECE Department,CEC Landran,Mohali 2 Prof., IT Department, CEC Landran,Mohali E-mail: a
Stannah Stairiser SR & Stairiser CR
 Stannah Stairiser SR & Stairiser CR www.stannahlifts.co.uk Our Stairiser inclined platform lifts are an ideal access solution if your building cannot accommodate a vertical lift, carrying one person safely
Stannah Stairiser SR & Stairiser CR www.stannahlifts.co.uk Our Stairiser inclined platform lifts are an ideal access solution if your building cannot accommodate a vertical lift, carrying one person safely
Performance Evaluation of Electric Vehicles in Macau
 Journal of Asian Electric Vehicles, Volume 12, Number 1, June 2014 Performance Evaluation of Electric Vehicles in Macau Tze Wood Ching 1, Wenlong Li 2, Tao Xu 3, and Shaojia Huang 4 1 Department of Electromechanical
Journal of Asian Electric Vehicles, Volume 12, Number 1, June 2014 Performance Evaluation of Electric Vehicles in Macau Tze Wood Ching 1, Wenlong Li 2, Tao Xu 3, and Shaojia Huang 4 1 Department of Electromechanical
PERFORMANCE ANALYSIS OF VARIOUS ULTRACAPACITOR AND ITS HYBRID WITH BATTERIES
 PERFORMANCE ANALYSIS OF VARIOUS ULTRACAPACITOR AND ITS HYBRID WITH BATTERIES Ksh Priyalakshmi Devi 1, Priyanka Kamdar 2, Akarsh Mittal 3, Amit K. Rohit 4, S. Rangnekar 5 1 JRF, Energy Centre, MANIT Bhopal
PERFORMANCE ANALYSIS OF VARIOUS ULTRACAPACITOR AND ITS HYBRID WITH BATTERIES Ksh Priyalakshmi Devi 1, Priyanka Kamdar 2, Akarsh Mittal 3, Amit K. Rohit 4, S. Rangnekar 5 1 JRF, Energy Centre, MANIT Bhopal
In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various
 25 6 18 In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various applications such as buildings maintenance, security and
25 6 18 In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various applications such as buildings maintenance, security and
What did we learn from Darpa Robotics Challenge
 Keynote speech/icra, Hamburg, Germany, Sep.. 2015 What did we learn from Darpa Robotics Challenge Jun Ho Oh Professor of Mechanical Engineering Director of Humanoid Robot Research Center KAIST DARPA Robotics
Keynote speech/icra, Hamburg, Germany, Sep.. 2015 What did we learn from Darpa Robotics Challenge Jun Ho Oh Professor of Mechanical Engineering Director of Humanoid Robot Research Center KAIST DARPA Robotics
PERFORMANCE AND ENHANCEMENT OF Z-SOURCE INVERTER FED BLDC MOTOR USING SLIDING MODE OBSERVER
 PERFORMANCE AND ENHANCEMENT OF Z-SOURCE INVERTER FED BLDC MOTOR USING SLIDING MODE OBSERVER K.Kalpanadevi 1, Mrs.S.Sivaranjani 2, 1 M.E. Power Systems Engineering, V.S.B.Engineering College, Karur, Tamilnadu,
PERFORMANCE AND ENHANCEMENT OF Z-SOURCE INVERTER FED BLDC MOTOR USING SLIDING MODE OBSERVER K.Kalpanadevi 1, Mrs.S.Sivaranjani 2, 1 M.E. Power Systems Engineering, V.S.B.Engineering College, Karur, Tamilnadu,
Development of a Wheelchair with Access for Most Users and Places
 Development of a Wheelchair with Access for Most Users and Places Ken Cox StairMaster Wheelchair Co., 2205 Del Ray CT., Arlington, TX 76013 ABSTRACT StairMaster Wheelchair is developing a stair-climbing
Development of a Wheelchair with Access for Most Users and Places Ken Cox StairMaster Wheelchair Co., 2205 Del Ray CT., Arlington, TX 76013 ABSTRACT StairMaster Wheelchair is developing a stair-climbing
Control of Mobile Robots
 Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE
 WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE Ilkka Leppänen, Sami Salmi and Aarne Halme Automation Technology Laboratory Helsinki University of Technology PL 3000, 02015 HUT, Finland E-mail
WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE Ilkka Leppänen, Sami Salmi and Aarne Halme Automation Technology Laboratory Helsinki University of Technology PL 3000, 02015 HUT, Finland E-mail
THE APPLICATION OF SERIES ELASTIC ACTUATORS IN THE HYDRAULIC ANKLE-FOOT ORTHOSIS
 Proceedings of the 2018 Design of Medical Devices Conference DMD2018 April 9-12, 2018, Minneapolis, MN, USA DMD2018-6822 THE APPLICATION OF SERIES ELASTIC ACTUATORS IN THE HYDRAULIC ANKLE-FOOT ORTHOSIS
Proceedings of the 2018 Design of Medical Devices Conference DMD2018 April 9-12, 2018, Minneapolis, MN, USA DMD2018-6822 THE APPLICATION OF SERIES ELASTIC ACTUATORS IN THE HYDRAULIC ANKLE-FOOT ORTHOSIS
2 Analysis and Synthesis of Bed Mechanism
 Design of Bed for Bedridden Patients: Analysis and Synthesis of Mechanisms Atul Andhare, Anil Onkar, Pramod Padole Abstract Managing bedridden patients is an important issue as many people are involved
Design of Bed for Bedridden Patients: Analysis and Synthesis of Mechanisms Atul Andhare, Anil Onkar, Pramod Padole Abstract Managing bedridden patients is an important issue as many people are involved
EMEA. Rebecca Margetts Senior Engineer: Mathematical Modelling AgustaWestland. Development of a Helicopter Drivetrain Dynamics Model in MSC ADAMS
 EMEA Rebecca Margetts Senior Engineer: Mathematical Modelling AgustaWestland Development of a Helicopter Drivetrain Dynamics Model in MSC ADAMS Introduction The AW101 Helicopter The Task Theory Existing
EMEA Rebecca Margetts Senior Engineer: Mathematical Modelling AgustaWestland Development of a Helicopter Drivetrain Dynamics Model in MSC ADAMS Introduction The AW101 Helicopter The Task Theory Existing
Farhana Shirin Lina BSC.(Electrical and Electronic) Memorial University of Newfoundland & Labrador
 Memorial University of Newfoundland & Labrador") Farhana Shirin Lina BSC.(Electrical and Electronic) Memorial University of Newfoundland & Labrador Introduction Research Objectives Different Control Systems System Modeling and Control Controller Design
Farhana Shirin Lina BSC.(Electrical and Electronic) Memorial University of Newfoundland & Labrador Introduction Research Objectives Different Control Systems System Modeling and Control Controller Design
Peak power shaving using Vanadium Redox Flow Battery for large scale grid connected Solar PV power system
 Peak power shaving using Vanadium Redox Flow Battery for large scale grid connected Solar PV power system Ankur Bhattacharjee*, Tathagata Sarkar, Hiranmay Saha Centre of Excellence for Green Energy and
Peak power shaving using Vanadium Redox Flow Battery for large scale grid connected Solar PV power system Ankur Bhattacharjee*, Tathagata Sarkar, Hiranmay Saha Centre of Excellence for Green Energy and
Simulation of real and reactive power flow Assessment with UPFC connected to a Single/double transmission line
 Simulation of real and reactive power flow Assessment with UPFC connected to a Single/double transmission line Nitin goel 1, Shilpa 2, Shashi yadav 3 Assistant Professor, Dept. of E.E, YMCA University
Simulation of real and reactive power flow Assessment with UPFC connected to a Single/double transmission line Nitin goel 1, Shilpa 2, Shashi yadav 3 Assistant Professor, Dept. of E.E, YMCA University
Optimal Design Methodology for LLC Resonant Converter in Battery Charging Applications Based on Time-Weighted Average Efficiency
 LeMeniz Infotech Page number 1 Optimal Design Methodology for LLC Resonant Converter in Battery Charging Applications Based on Time-Weighted Average Efficiency Abstract The problems of storage capacity
LeMeniz Infotech Page number 1 Optimal Design Methodology for LLC Resonant Converter in Battery Charging Applications Based on Time-Weighted Average Efficiency Abstract The problems of storage capacity
Intelligent Power Management of Electric Vehicle with Li-Ion Battery Sheng Chen 1,a, Chih-Chen Chen 2,b
 Applied Mechanics and Materials Vols. 300-301 (2013) pp 1558-1561 Online available since 2013/Feb/13 at www.scientific.net (2013) Trans Tech Publications, Switzerland doi:10.4028/www.scientific.net/amm.300-301.1558
Applied Mechanics and Materials Vols. 300-301 (2013) pp 1558-1561 Online available since 2013/Feb/13 at www.scientific.net (2013) Trans Tech Publications, Switzerland doi:10.4028/www.scientific.net/amm.300-301.1558
Design of Power System Control in Hybrid Electric. Vehicle
 Page000049 EVS-25 Shenzhen, China, Nov 5-9, 2010 Design of Power System Control in Hybrid Electric Vehicle Van Tsai Liu Department of Electrical Engineering, National Formosa University, Huwei 632, Taiwan
Page000049 EVS-25 Shenzhen, China, Nov 5-9, 2010 Design of Power System Control in Hybrid Electric Vehicle Van Tsai Liu Department of Electrical Engineering, National Formosa University, Huwei 632, Taiwan
USER MANUAL PRODUCT CODE: WC CareCo (UK) Ltd, Hubert Road, Brentwood, Essex, CM14 4JE PAGE 1
 Ltd, Hubert Road, Brentwood, Essex, CM14 4JE PAGE 1") by USER MANUAL PRODUCT CODE: WC01059 CareCo (UK) Ltd, Hubert Road, Brentwood, Essex, CM14 4JE PAGE 1 CONTENTS 1. INTRODUCTION 2. IDENTIFICATION OF PARTS 3. SAFETY REGULATIONS 4. SAFETY WARNINGS 5. USER
by USER MANUAL PRODUCT CODE: WC01059 CareCo (UK) Ltd, Hubert Road, Brentwood, Essex, CM14 4JE PAGE 1 CONTENTS 1. INTRODUCTION 2. IDENTIFICATION OF PARTS 3. SAFETY REGULATIONS 4. SAFETY WARNINGS 5. USER
Wheeled Mobile Robots
 Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Development of Pushrim-Activated Power-Assisted Wheelchair
 Development of Pushrim-Activated Power-Assisted Wheelchair Yoon Heo, Ki-Tae Nam, Eung-Pyo Hong, Mu-Sung Mun Korea Orthopedics & Rehabilitation Engineering Center 26, Gyeongin-ro 10beon-gil, Bupyeong-gu,
Development of Pushrim-Activated Power-Assisted Wheelchair Yoon Heo, Ki-Tae Nam, Eung-Pyo Hong, Mu-Sung Mun Korea Orthopedics & Rehabilitation Engineering Center 26, Gyeongin-ro 10beon-gil, Bupyeong-gu,
A CONCEPT OF MODIFICATION AND SIMULATION STUDIES OF A MECHATRONIC STAIR TRANSPORTER FOR THE DISABLED
 DOI 10.1515/ama-2015-0034 acta mechanica et automatica, vol.9 no.4 (2015) A CONCEPT OF MODIFICATION AND SIMULATION STUDIES OF A MECHATRONIC STAIR TRANSPORTER FOR THE DISABLED Sławomir WUDARCZYK *, Artur
DOI 10.1515/ama-2015-0034 acta mechanica et automatica, vol.9 no.4 (2015) A CONCEPT OF MODIFICATION AND SIMULATION STUDIES OF A MECHATRONIC STAIR TRANSPORTER FOR THE DISABLED Sławomir WUDARCZYK *, Artur
Performance Analysis of Brushless DC Motor Using Intelligent Controllers and Minimization of Torque Ripples
 International Journal of Electronic and Electrical Engineering. ISSN 0974-2174, Volume 7, Number 3 (2014), pp. 321-326 International Research Publication House http://www.irphouse.com Performance Analysis
International Journal of Electronic and Electrical Engineering. ISSN 0974-2174, Volume 7, Number 3 (2014), pp. 321-326 International Research Publication House http://www.irphouse.com Performance Analysis
Booming Noise Optimization on an All Wheel Drive Vehicle
 on an All Wheel Drive Vehicle 3 rd International Conference Dynamic Simulation in Vehicle Engineering, 22-23 May 2014, St. Valentin, Austria Dr. Thomas Mrazek, ECS Team Leader Vehicle Dynamics ECS / Disclosure
on an All Wheel Drive Vehicle 3 rd International Conference Dynamic Simulation in Vehicle Engineering, 22-23 May 2014, St. Valentin, Austria Dr. Thomas Mrazek, ECS Team Leader Vehicle Dynamics ECS / Disclosure
INTELLIGENT ENERGY MANAGEMENT IN A TWO POWER-BUS VEHICLE SYSTEM
 2011 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM MODELING & SIMULATION, TESTING AND VALIDATION (MSTV) MINI-SYMPOSIUM AUGUST 9-11 DEARBORN, MICHIGAN INTELLIGENT ENERGY MANAGEMENT IN
2011 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM MODELING & SIMULATION, TESTING AND VALIDATION (MSTV) MINI-SYMPOSIUM AUGUST 9-11 DEARBORN, MICHIGAN INTELLIGENT ENERGY MANAGEMENT IN
Comparison of Braking Performance by Electro-Hydraulic ABS and Motor Torque Control for In-wheel Electric Vehicle
 ES27 Barcelona, Spain, November 7-2, 23 Comparison of Braking Performance by Electro-Hydraulic ABS and Motor Torque Control for In-wheel Electric ehicle Sungyeon Ko, Chulho Song, Jeongman Park, Jiweon
ES27 Barcelona, Spain, November 7-2, 23 Comparison of Braking Performance by Electro-Hydraulic ABS and Motor Torque Control for In-wheel Electric ehicle Sungyeon Ko, Chulho Song, Jeongman Park, Jiweon
An Autonomous Braking System of Cars Using Artificial Neural Network
 I J C T A, 9(9), 2016, pp. 3665-3670 International Science Press An Autonomous Braking System of Cars Using Artificial Neural Network P. Pavul Arockiyaraj and P.K. Mani ABSTRACT The main aim is to develop
I J C T A, 9(9), 2016, pp. 3665-3670 International Science Press An Autonomous Braking System of Cars Using Artificial Neural Network P. Pavul Arockiyaraj and P.K. Mani ABSTRACT The main aim is to develop
Investigating two-wheeler balance using experimental bicycles and simulators
 Investigating two-wheeler balance using experimental bicycles and simulators George Dialynas 1, Oliver Lee 1, Riender Happee 1, Arend Schwab 1 Francesco Celiberti 2, Marco Grottoli 2 TU Delft 1, Netherlands
Investigating two-wheeler balance using experimental bicycles and simulators George Dialynas 1, Oliver Lee 1, Riender Happee 1, Arend Schwab 1 Francesco Celiberti 2, Marco Grottoli 2 TU Delft 1, Netherlands
Study on State of Charge Estimation of Batteries for Electric Vehicle
 Study on State of Charge Estimation of Batteries for Electric Vehicle Haiying Wang 1,a, Shuangquan Liu 1,b, Shiwei Li 1,c and Gechen Li 2 1 Harbin University of Science and Technology, School of Automation,
Study on State of Charge Estimation of Batteries for Electric Vehicle Haiying Wang 1,a, Shuangquan Liu 1,b, Shiwei Li 1,c and Gechen Li 2 1 Harbin University of Science and Technology, School of Automation,
Australian Journal of Basic and Applied Sciences. Resonant Power Converter fed Hybrid Electric Vehicle with BLDC Motor Drive
 ISSN:1991-8178 Australian Journal of Basic and Applied Sciences Journal home page: www.ajbasweb.com Resonant Power Converter fed Hybrid Electric Vehicle with BLDC Motor Drive 1 Balamurugan A. and 2 Ramkumar
ISSN:1991-8178 Australian Journal of Basic and Applied Sciences Journal home page: www.ajbasweb.com Resonant Power Converter fed Hybrid Electric Vehicle with BLDC Motor Drive 1 Balamurugan A. and 2 Ramkumar
Design of Advanced Multi Desire Wheel-Chair
 Design of Advanced Multi Desire Wheel-Chair Palkar Aman Manohar Department of Materials & Metallurgical Engineering National Institute of Foundry & Forge Technology, Ranchi, Jharkhand, India Dr. Ghanshyam
Design of Advanced Multi Desire Wheel-Chair Palkar Aman Manohar Department of Materials & Metallurgical Engineering National Institute of Foundry & Forge Technology, Ranchi, Jharkhand, India Dr. Ghanshyam
Multi-body Dynamical Modeling and Co-simulation of Active front Steering Vehicle
 The nd International Conference on Computer Application and System Modeling (01) Multi-body Dynamical Modeling and Co-simulation of Active front Steering Vehicle Feng Ying Zhang Qiao Dept. of Automotive
The nd International Conference on Computer Application and System Modeling (01) Multi-body Dynamical Modeling and Co-simulation of Active front Steering Vehicle Feng Ying Zhang Qiao Dept. of Automotive
Robotic Wheel Loading Process in Automotive Manufacturing Automation
 The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Robotic Wheel Loading Process in Automotive Manufacturing Automation Heping Chen, William
The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Robotic Wheel Loading Process in Automotive Manufacturing Automation Heping Chen, William
Understeer characteristics for energy-efficient fully electric vehicles with multiple motors
 Understeer characteristics for energy-efficient fully electric vehicles with multiple motors LENZO, Basilio , SORNIOTTI, A, DE FILIPPIS, G, GRUBER, P and SANNEN, K Available
Understeer characteristics for energy-efficient fully electric vehicles with multiple motors LENZO, Basilio , SORNIOTTI, A, DE FILIPPIS, G, GRUBER, P and SANNEN, K Available
Implementation SVC and TCSC to Improvement the Efficacy of Diyala Electric Network (132 kv).
.") American Journal of Engineering Research (AJER) e-issn: 2320-0847 p-issn : 2320-0936 Volume-4, Issue-5, pp-163-170 www.ajer.org Research Paper Open Access Implementation SVC and TCSC to Improvement the
American Journal of Engineering Research (AJER) e-issn: 2320-0847 p-issn : 2320-0936 Volume-4, Issue-5, pp-163-170 www.ajer.org Research Paper Open Access Implementation SVC and TCSC to Improvement the
Simulation of Voltage Stability Analysis in Induction Machine
 International Journal of Electronic and Electrical Engineering. ISSN 0974-2174 Volume 6, Number 1 (2013), pp. 1-12 International Research Publication House http://www.irphouse.com Simulation of Voltage
International Journal of Electronic and Electrical Engineering. ISSN 0974-2174 Volume 6, Number 1 (2013), pp. 1-12 International Research Publication House http://www.irphouse.com Simulation of Voltage
Smart Grid. Sahar Rahim. Supervisor: Dr. Nadeem Javaid. MS-Electrical Engineering
 Smart Grid Sahar Rahim MS-Electrical Engineering Supervisor: Dr. Nadeem Javaid Contents Introduction Conventional power grid Smart grid Comparison between Conventional and Smart grid Difference between
Smart Grid Sahar Rahim MS-Electrical Engineering Supervisor: Dr. Nadeem Javaid Contents Introduction Conventional power grid Smart grid Comparison between Conventional and Smart grid Difference between
VALIDATION OF ROLING AND STEER RESISTANCE OF ARTICULATED TRACKED ROBOT
 VALIDATION OF ROLING AND STEER RESISTANCE OF ARTICULATED TRACKED ROBOT *M.J. Łopatka, and T. Muszyński Military Academy of technology 2 gen. S. Kaliskiego Street Warsaw, Poland 00-908 (*Corresponding author:
VALIDATION OF ROLING AND STEER RESISTANCE OF ARTICULATED TRACKED ROBOT *M.J. Łopatka, and T. Muszyński Military Academy of technology 2 gen. S. Kaliskiego Street Warsaw, Poland 00-908 (*Corresponding author:
Simulation and Analysis of Vehicle Suspension System for Different Road Profile
 Simulation and Analysis of Vehicle Suspension System for Different Road Profile P.Senthil kumar 1 K.Sivakumar 2 R.Kalidas 3 1 Assistant professor, 2 Professor & Head, 3 Student Department of Mechanical
Simulation and Analysis of Vehicle Suspension System for Different Road Profile P.Senthil kumar 1 K.Sivakumar 2 R.Kalidas 3 1 Assistant professor, 2 Professor & Head, 3 Student Department of Mechanical
Mathematical modeling of the electric drive train of the sports car
 1 Portál pre odborné publikovanie ISSN 1338-0087 Mathematical modeling of the electric drive train of the sports car Madarás Juraj Elektrotechnika 17.09.2012 The present electric vehicles are using for
1 Portál pre odborné publikovanie ISSN 1338-0087 Mathematical modeling of the electric drive train of the sports car Madarás Juraj Elektrotechnika 17.09.2012 The present electric vehicles are using for
Design Considerations of Piezo Stepping Actuator
 Design Considerations of Piezo Stepping Actuator Ashwin Frank Lobo 1, Md Abdul Raheman 2, Muralidhara 3, Rathnamala Rao 4 PG Student, Department of Electrical and Electronics Engineering, NMAMIT, Nitte,
Design Considerations of Piezo Stepping Actuator Ashwin Frank Lobo 1, Md Abdul Raheman 2, Muralidhara 3, Rathnamala Rao 4 PG Student, Department of Electrical and Electronics Engineering, NMAMIT, Nitte,
Usage of GTM 1 and GTM HAMMER VARIO
 USER'S MANUAL TABLE OF CONTENTS Usage of GTM 1 and GTM HAMMER VARIO 3 Basic information 3 Appendix 1 4 Description of construction 5 Safe handling of GTM 1 5 Stability and Balance 6 Curbs 6 Stairways 7
USER'S MANUAL TABLE OF CONTENTS Usage of GTM 1 and GTM HAMMER VARIO 3 Basic information 3 Appendix 1 4 Description of construction 5 Safe handling of GTM 1 5 Stability and Balance 6 Curbs 6 Stairways 7
USER MANUAL. CareCo (UK) Ltd, Hubert Road, Brentwood, Essex, CM14 4JE PAGE 1 PRODUCT CODE WC01060.BLU
 Ltd, Hubert Road, Brentwood, Essex, CM14 4JE PAGE 1 PRODUCT CODE WC01060.BLU") by USER MANUAL PRODUCT CODE WC01060.BLU PAGE 1 CareCo (UK) Ltd, Hubert Road, Brentwood, Essex, CM14 4JE INFORMATION Thank you for purchasing a wheelchair from I-GO. This I-GO wheelchair has been designed
by USER MANUAL PRODUCT CODE WC01060.BLU PAGE 1 CareCo (UK) Ltd, Hubert Road, Brentwood, Essex, CM14 4JE INFORMATION Thank you for purchasing a wheelchair from I-GO. This I-GO wheelchair has been designed
Benefit of Push-pull Locomotion for Planetary Rover Mobility
 Benefit of Push-pull Locomotion for Planetary Rover Mobility C. Creager 1, S. Moreland 2, K. Skonieczny 3, K. Johnson 4, V. Asnani 5, R. Gilligan 6 1 NASA Glenn Research Center, Mail Stop 23-3, 21000 Brookpark
Benefit of Push-pull Locomotion for Planetary Rover Mobility C. Creager 1, S. Moreland 2, K. Skonieczny 3, K. Johnson 4, V. Asnani 5, R. Gilligan 6 1 NASA Glenn Research Center, Mail Stop 23-3, 21000 Brookpark
Drivetrain design for an ultra light electric vehicle with high efficiency
 World Electric Vehicle Journal Vol. 6 - ISSN 3-6653 - 3 WEVA Page Page EVS7 Barcelona, Spain, November 7 -, 3 Drivetrain design for an ultra light electric vehicle with high efficiency Isabelle Hofman,,
World Electric Vehicle Journal Vol. 6 - ISSN 3-6653 - 3 WEVA Page Page EVS7 Barcelona, Spain, November 7 -, 3 Drivetrain design for an ultra light electric vehicle with high efficiency Isabelle Hofman,,