Control of Mobile Robots
|
|
|
- Aleesha Lester
- 5 years ago
- Views:
Transcription
 Politecnico di Milano Dipartimento di Elettronica, Informazione e")
1 Control of Mobile Robots Introduction Prof. Luca Bascetta Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria





2 Applications of mobile autonomous robots Logistic robotics 2



3 Applications of mobile autonomous robots Agricultural robotics 3


4 Applications of mobile autonomous robots Construction robotics 4



5 Applications of mobile autonomous robots Military robotics 5





6 Applications of mobile autonomous robots Service robotics 6




7 Applications of mobile autonomous robots Transportation robotics 7
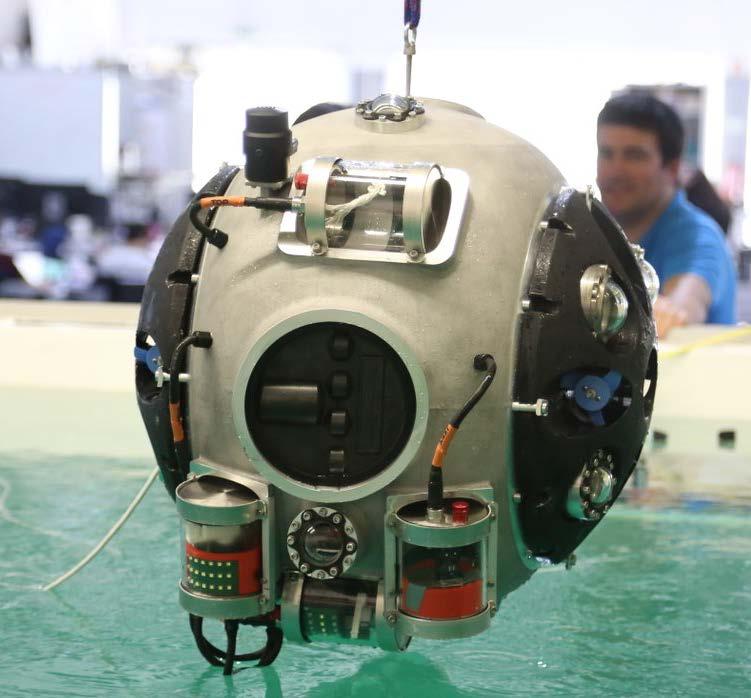

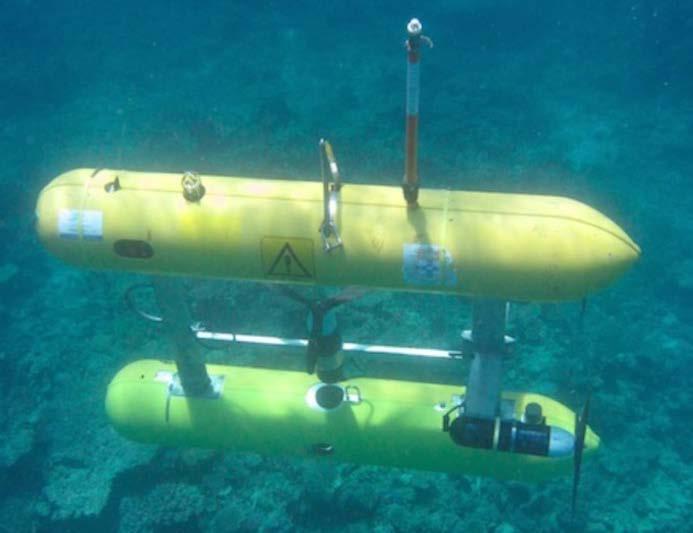
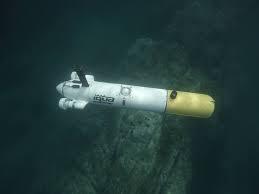

8 Applications of mobile autonomous robots Marine robotics 8
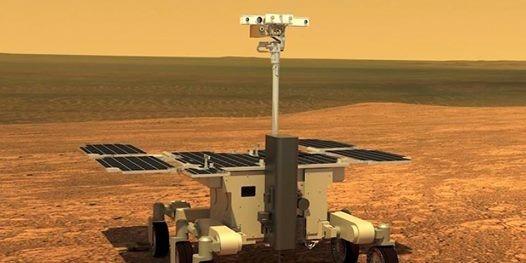
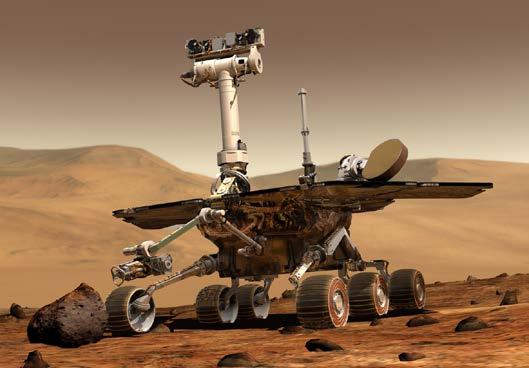
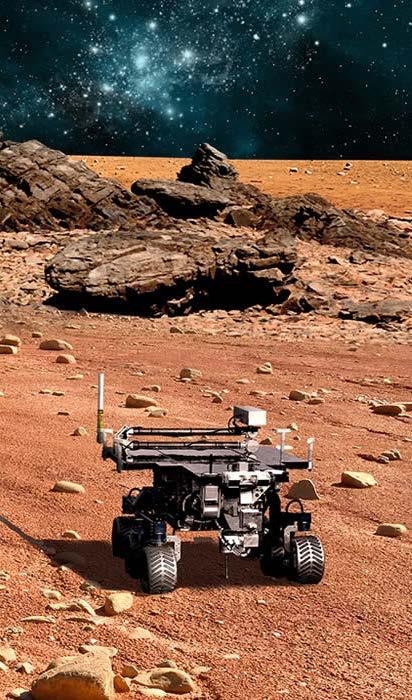

9 Applications of mobile autonomous robots Space robotics 9





10 Applications of mobile autonomous robots Aerial robotics 10




11 Applications of mobile autonomous robots and many more 11
12 Control of Mobile robots 12 Though there are many different application fields, we will focused on: ground robotics mobile manipulation In the context of ground robotics we will concentrate on wheel-based mobile robots. We start introducing: wheeled locomotion and kinematic structures main components of an autonomous mobile robot hardware, software and control architectures
 a locomotion system Considering only")

13 Mobile robots 13 A mobile robot consists of one or more rigid bodies (base or chassis) a locomotion system Considering only ground mobile robots, we can classify them in wheeled mobile robots legged mobile robots We will concentrate on wheeled mobile robots.

14 Conventional wheels 14 Let s start considering wheels, the most important mechanical element of a wheeled robot. We can classify a conventional wheel as: fixed wheel, can rotate about an axis going through its center and orthogonal to the wheel plane. The wheel is rigidly attached to the chassis (its orientation with respect to the chassis is constant)

15 Conventional wheels 15 Let s start considering wheels, the most important mechanical element of a wheeled robot. We can classify a conventional wheel as: fixed wheel steerable wheel, can rotate about an axis going through its center and orthogonal to the wheel plane, and about a second vertical axis going through its center (the wheel can change its orientation with respect to the chassis)

16 Conventional wheels 16 Let s start considering wheels, the most important mechanical element of a wheeled robot. We can classify a conventional wheel as: fixed wheel steerable wheel caster wheel, has two axes of rotation, but the vertical axis is displaced by a constant offset with respect to the center of the wheel

17 Special wheels 17 Other special types of wheels also exist, the most important one being the Mecanum or Swedish wheel. A mecanum wheel is a fixed wheel with passive rollers placed along the external rim. The axis of rotation of each roller is typically inclined by 45 with respect to the plane of the wheel. Mecanum wheels allows to set up omnidirectional vehicles.

18 Kinematic structures 18 The main kinematic structures we can obtain by combining the three conventional wheels are: differential-drive vehicle, a vehicle with two fixed wheels with a common axis of rotation, and one or more caster wheels. The fixed wheels are separately controlled, each one by a different motor. The caster wheel is passive and is only used to keep the robot statically balanced. The main characteristic of this robot is that it can rotate on the spot.
, the second motor control the rotation of the wheels around the vertical axis (steering).")
19 Kinematic structures 19 synchro-drive vehicle, a vehicle with three aligned steerable wheels, synchronously driven by two motors through a mechanical coupling. One motor controls the rotation of the wheels around the horizontal axis (traction), the second motor control the rotation of the wheels around the vertical axis (steering). The main characteristic of this robot is that the heading of the chassis does not change during motion, unless a third motor is added.

20 Kinematic structures 20 tricycle vehicle, a vehicle with two fixed rear wheels and a steerable front wheel. The steering wheel is actuated by a steering motor. The rear fixed wheels are usually driven by a single motor, whose torque is distributed to the wheels by a mechanical differential.


21 Kinematic structures 21 car-like vehicle, a vehicle with two fixed wheels mounted on a rear axle and two steerable wheels mounted on a front axle. The steering wheels are actuated by a steering motor. Another motor provides traction acting on the front or rear wheels. In order to avoid slippage, the front wheels must have a slightly different orientation. When the vehicle moves along a curve the internal wheel is slightly more steered with respect to the external one. This behavior is guaranteed by a mechanical device called Ackermann steering.



22 Kinematic structures 22 omnidirectional vehicle, a vehicle typically equipped with four mecanum wheels that can move instantaneously in any Cartesian direction, as well as reorient itself on the spot.



23 Kinematic structures 23 mobile manipulator, as we have already seen in many examples, a mobile robot can be combined with a manipulator to obtain a mobile manipulator. Adding a mobile base to a manipulator decreases its accuracy, but can definitely increase its workspace.
24 Control of Mobile robots: an example 24 Let s consider the following example of personal mobility. We would like to design an autonomous personal mobility device using a commercial electric wheelchair. Consider the following indoor use case: a user select a room from the building map the wheelchair has to autonomously move from its current location to the desired room avoiding static and moving obstacles What are most important functionalities we need to design in order to develop this device?
25 Control of Mobile robots: an example 25 Using a commercial electric wheelchair, we must design: the navigation system the hardware/software interface between the navigation system and the wheelchair commercial control system Let s start analyzing the commercial wheelchair: it is a differential-drive robot, characterized by two rear independently driven fixed wheels and two front caster wheels a user can operate the wheelchair commanding its linear and rotational velocities using a joystick
26 Control of Mobile robots: an example 26 its internal control system is equipped with two motor drives (current and velocity loops) an algorithm to synchronize the two motors to guarantee the desired linear/angular speed To let the wheelchair autonomously move in the environment we have to substitute the user manual control with an automatic control system (navigation system). The control variables of this system are the wheelchair linear and angular velocity. We need to design an hardware/software interface between the navigation system and the wheelchair internal control system.
27 Control of Mobile robots: an example 27 What is a navigation system? a combination of algorithms that aim at allowing the autonomous motion of the robot in the environment, avoiding obstacles and accomplishing its task (moving from the current position to a desired position). What are the most important functionalities of a navigation system?




28 Control of Mobile robots: an example 28 A navigation system is composed of the following main functionalities: mapping localization environment perception path planning path following The wheelchair has to autonomously move from its current location to the user selected room, avoiding obstacles

29 Mapping and localization 29 Mapping is the task of modelling the environment Localization is the task of estimating the robot pose with respect to the environment
30 Simultaneous localization and mapping 30 If robot poses and map of the environment are computed at the same time we have a SLAM problem. SLAM is a complex problem a map is need for localization, and a pose estimate is needed for mapping but it is fundamental for autonomous navigation.

31 Simultaneous localization and mapping 31 In SLAM a probabilistic approach is adopted, in order to properly consider uncertainty in robot motion uncertainty in measurements Three main approaches exist: Kalman filtering particle filtering graph-based

 collision avoidance, navigation, and learning (what is")
 manipulation, navigation, and learning (how can I")
32 Environment perception 32 What are the roles of perception in robotics: localization and mapping (where am I relative to the world?) collision avoidance, navigation, and learning (what is around me?) manipulation, navigation, and learning (how can I safely interact with environment?) inference and learning (how can I solve new problems?)





33 Environment perception 33 Many different sensors are used: position / velocity sensors IMU (accelerometer / gyroscope / magnetometer) RGB / RGB-D cameras 2D / 3D laser scanners GPS Depending on: indoor / outdoor environments accuracy / reliability / cost constraints specific application constraints


34 Perception, localization and mapping: the wheelchair example 34
35 An example of hardware, software and control architecture 35 We consider again the wheelchair example to analyze the hardware, software and control architecture of a navigation system. The analysis is based on an example, it is thus not complete (e.g., safety is not considered), but it is useful to emphasize the main components of the three architectures. The software architecture is based on ROS (Robot Operating System), a set of open source software libraries and tools, from drivers to state-of-the-art algorithms, and powerful developer tools, that help build robot applications.





36 Hardware architecture Actuator interface Ground control station... Actuator 1 Actuator 2 Actuator N
37 A few words on ROS 37 ROS Master ROS Master Registration Registration Registration ROS Node 1 Messages ROS Node 2 Messages ROS Node n ROS Node 1 Publisher (topic_publisher) Messages (topic) ROS Node n Subscriber (topic_subscriber) Messages

38 Software architecture 38



39 Control architecture 39 Slow, not real-time, should only support online replanning in the sensor range Navigation level Path planning Planned path / trajectory Approximately the same bandwidth of a human driver, sensor processing is computationally intensive and not realtime, control can be soft real-time Sensor Sensor processing Sensor data Path following Actuation commands Motor drives, standard PID control, torque / velocity loops, fast loops, hard real-time systems Actuation level
Wheeled Mobile Robots
 Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Introduction to Robotics
 Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Research Center Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7,
Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Research Center Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7,
Robot Arm with Conveyor Belts
 Robot Arm with Conveyor Belts This example models a robotic arm and two conveyor belts. One conveyor belts bring blocks to the robot. The robot grabs the block, flips it over and transfers it to another
Robot Arm with Conveyor Belts This example models a robotic arm and two conveyor belts. One conveyor belts bring blocks to the robot. The robot grabs the block, flips it over and transfers it to another
Enhancing Wheelchair Mobility Through Dynamics Mimicking
 Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
KUKA omnimove _drive technology
 Basics KMP 400 KMP 1500 omnimove KMR iiwa KMR QUANTEC Future Robots KUKA omnimove _drive technology Page: 1 Basics KMP 400 KMP 1500 omnimove KMR iiwa KMR QUANTEC Future Robots _mobile robotics omniwheel
Basics KMP 400 KMP 1500 omnimove KMR iiwa KMR QUANTEC Future Robots KUKA omnimove _drive technology Page: 1 Basics KMP 400 KMP 1500 omnimove KMR iiwa KMR QUANTEC Future Robots _mobile robotics omniwheel
Functional Algorithm for Automated Pedestrian Collision Avoidance System
 Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
SPMM OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000?
 SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE
 WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE Ilkka Leppänen, Sami Salmi and Aarne Halme Automation Technology Laboratory Helsinki University of Technology PL 3000, 02015 HUT, Finland E-mail
WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE Ilkka Leppänen, Sami Salmi and Aarne Halme Automation Technology Laboratory Helsinki University of Technology PL 3000, 02015 HUT, Finland E-mail
SPMM OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000?
 SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
Week 11. Module 5: EE100 Course Project Making your first robot
 Week 11 Module 5: EE100 Course Project Making your first robot Dr. Ing. Ahmad Kamal Nasir Office Hours: Room 9-245A Tuesday (1000-1100) Wednesday (1500-1600) Course Project: Wall-Follower Robot Week 1
Week 11 Module 5: EE100 Course Project Making your first robot Dr. Ing. Ahmad Kamal Nasir Office Hours: Room 9-245A Tuesday (1000-1100) Wednesday (1500-1600) Course Project: Wall-Follower Robot Week 1
In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various
 25 6 18 In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various applications such as buildings maintenance, security and
25 6 18 In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various applications such as buildings maintenance, security and
DEVELOPMENT OF A CONTROL MODEL FOR A FOUR WHEEL MECANUM VEHICLE. M. de Villiers 1, Prof. G. Bright 2
 de Villiers Page 1 of 10 DEVELOPMENT OF A CONTROL MODEL FOR A FOUR WHEEL MECANUM VEHICLE M. de Villiers 1, Prof. G. Bright 2 1 Council for Scientific and Industrial Research Pretoria, South Africa e-mail1:
de Villiers Page 1 of 10 DEVELOPMENT OF A CONTROL MODEL FOR A FOUR WHEEL MECANUM VEHICLE M. de Villiers 1, Prof. G. Bright 2 1 Council for Scientific and Industrial Research Pretoria, South Africa e-mail1:
1 Configuration Space Path Planning
 CS 4733, Class Notes 1 Configuration Space Path Planning Reference: 1) A Simple Motion Planning Algorithm for General Purpose Manipulators by T. Lozano-Perez, 2) Siegwart, section 6.2.1 Fast, simple to
CS 4733, Class Notes 1 Configuration Space Path Planning Reference: 1) A Simple Motion Planning Algorithm for General Purpose Manipulators by T. Lozano-Perez, 2) Siegwart, section 6.2.1 Fast, simple to
Linear Shaft Motors in Parallel Applications
 Linear Shaft Motors in Parallel Applications Nippon Pulse s Linear Shaft Motor (LSM) has been successfully used in parallel motor applications. Parallel applications are ones in which there are two or
Linear Shaft Motors in Parallel Applications Nippon Pulse s Linear Shaft Motor (LSM) has been successfully used in parallel motor applications. Parallel applications are ones in which there are two or
UNIVERSITÉ DE MONCTON FACULTÉ D INGÉNIERIE. Moncton, NB, Canada PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY
 FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Last week we saw. Today: The Role of Locomotion : Robotics systems and science Lecture 4: Locomotion
 6.141: Robotics systems and science Lecture 4: Locomotion Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2009 Last week we saw Bang-bang control Open loop control Closed loop control: P, I, D Motors
6.141: Robotics systems and science Lecture 4: Locomotion Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2009 Last week we saw Bang-bang control Open loop control Closed loop control: P, I, D Motors
Unmanned autonomous vehicles in air land and sea
 based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
Unmanned Surface Vessels - Opportunities and Technology
 Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
SAFERIDER Project FP SAFERIDER Andrea Borin November 5th, 2010 Final Event & Demonstration Leicester, UK
 SAFERIDER Project FP7-216355 SAFERIDER Advanced Rider Assistance Systems Andrea Borin andrea.borin@ymre.yamaha-motor.it ARAS: Advanced Rider Assistance Systems Speed Alert Curve Frontal Collision Intersection
SAFERIDER Project FP7-216355 SAFERIDER Advanced Rider Assistance Systems Andrea Borin andrea.borin@ymre.yamaha-motor.it ARAS: Advanced Rider Assistance Systems Speed Alert Curve Frontal Collision Intersection
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Automobile Body, Chassis, Occupant and Pedestrian Safety, and Structures Track
 Automobile Body, Chassis, Occupant and Pedestrian Safety, and Structures Track These sessions are related to Body Engineering, Fire Safety, Human Factors, Noise and Vibration, Occupant Protection, Steering
Automobile Body, Chassis, Occupant and Pedestrian Safety, and Structures Track These sessions are related to Body Engineering, Fire Safety, Human Factors, Noise and Vibration, Occupant Protection, Steering
Novel Chassis Concept for Omnidirectional Driving Maneuvers
 Novel Chassis Concept for Omnidirectional Driving Maneuvers Challenges in modelling suspensions with wheel individual steering system KIT The Research University in the Helmholtz Association www.kit.edu
Novel Chassis Concept for Omnidirectional Driving Maneuvers Challenges in modelling suspensions with wheel individual steering system KIT The Research University in the Helmholtz Association www.kit.edu
ParcelBot A Tracked Parcel Transporter with High Obstacle Negotiation Capabilities
 Research Collection Conference Paper ParcelBot A Tracked Parcel Transporter with High Obstacle Negotiation Capabilities Author(s): Hoepflinger, Mark H.; Baschung, David; Remy, C. D.; Hutter, Marco; Siegwart,
Research Collection Conference Paper ParcelBot A Tracked Parcel Transporter with High Obstacle Negotiation Capabilities Author(s): Hoepflinger, Mark H.; Baschung, David; Remy, C. D.; Hutter, Marco; Siegwart,
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Red Team. DARPA Grand Challenge Technical Paper. Revision: 6.1 Submitted for Public Release. April 8, 2004
 Red Team DARPA Grand Challenge Technical Paper Revision: 6.1 Submitted for Public Release April 8, 2004 Team Leader: William Red L. Whittaker Email address: red@ri.cmu.edu Mailing address: Carnegie Mellon
Red Team DARPA Grand Challenge Technical Paper Revision: 6.1 Submitted for Public Release April 8, 2004 Team Leader: William Red L. Whittaker Email address: red@ri.cmu.edu Mailing address: Carnegie Mellon
THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA.
 GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
Items to specify: 4. Motor Speed Control. Head Unit. Radar. Steering Wheel Angle. ego vehicle speed control
 Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
1 Configuration Space Path Planning
 CS 4733, Class Notes 1 Configuration Space Path Planning Reference: 1) A Simple Motion Planning Algorithm for General Purpose Manipulators by T. Lozano-Perez, 2) Siegwart, section 6.2.1 Fast, simple to
CS 4733, Class Notes 1 Configuration Space Path Planning Reference: 1) A Simple Motion Planning Algorithm for General Purpose Manipulators by T. Lozano-Perez, 2) Siegwart, section 6.2.1 Fast, simple to
UNITR B/8261. Your latestgeneration. AGV system
 UNITR B/8261 Your latestgeneration AGV system Short and succinct Operation web-based, intuitive Drive Safe an exemplary safety concept Multitalented automatic module changes Navigation simple, flexible,
UNITR B/8261 Your latestgeneration AGV system Short and succinct Operation web-based, intuitive Drive Safe an exemplary safety concept Multitalented automatic module changes Navigation simple, flexible,
Design of Wheeled Mobile Robot with Tri-Star Wheel as Rescue Robot
 Design of Wheeled Mobile Robot with Tri-Star Wheel as Rescue Robot Rafiuddin Syam, Wahyu H. Piarah Mechanical Engineering Department Engineering Faculty, Hasanuddin University Jl. P. Kemerdekaan Km 10
Design of Wheeled Mobile Robot with Tri-Star Wheel as Rescue Robot Rafiuddin Syam, Wahyu H. Piarah Mechanical Engineering Department Engineering Faculty, Hasanuddin University Jl. P. Kemerdekaan Km 10
Your vehicle, our navigation. ANT - Autonomous Navigation Technology
 Your vehicle, our navigation ANT - Autonomous Navigation Technology ANT allows your vehicle to localize and navigate completely autonomously. Installation process ANT is environment based ANT uses natural
Your vehicle, our navigation ANT - Autonomous Navigation Technology ANT allows your vehicle to localize and navigate completely autonomously. Installation process ANT is environment based ANT uses natural
Simulation of freight train during braking operation using SIMPACK
 Simulation of freight train during braking operation using SIMPACK Politecnico di Torino Dipartimento di Meccanica N. Bosso, A.Gugliotta, A. Somà 1/21 Introduction This activity has been made in a research
Simulation of freight train during braking operation using SIMPACK Politecnico di Torino Dipartimento di Meccanica N. Bosso, A.Gugliotta, A. Somà 1/21 Introduction This activity has been made in a research
REU: Improving Straight Line Travel in a Miniature Wheeled Robot
 THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
MECHATRONICS STRUCTURE OF THE CENTAUR LIKE WHEELED SERVICE ROBOT. Sami Ylönen, Aarne Halme
 MECHATRONICS STRUCTURE OF THE CENTAUR LIKE WHEELED SERVICE ROBOT Sami Ylönen, Aarne Halme Helsinki University of Technology, Automation Technology laboratory P.O.Box 5400, 02015 HUT, Finland, Tel. +358-9-451
MECHATRONICS STRUCTURE OF THE CENTAUR LIKE WHEELED SERVICE ROBOT Sami Ylönen, Aarne Halme Helsinki University of Technology, Automation Technology laboratory P.O.Box 5400, 02015 HUT, Finland, Tel. +358-9-451
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help?
 Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
MOVE IT FOR TOMORROW. EN torsten.torwegge.de/en
 MOVE IT FOR TOMORROW EN torsten.torwegge.de/en // facts and figures autonomous remote 190er 300er* 190er 300er* Length 1,285 mm approx. 2,500 mm 1,285 mm approx. 2,500 mm Width 835 mm approx. 1,530 mm
MOVE IT FOR TOMORROW EN torsten.torwegge.de/en // facts and figures autonomous remote 190er 300er* 190er 300er* Length 1,285 mm approx. 2,500 mm 1,285 mm approx. 2,500 mm Width 835 mm approx. 1,530 mm
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Development of Relief Valve Automatic assembly technology
 Development of Relief Valve Automatic assembly technology Technology Explanation Development of Relief Valve Automatic assembly technology TAKIGUCHI Masaki Abstract Construction machinery is equipped with
Development of Relief Valve Automatic assembly technology Technology Explanation Development of Relief Valve Automatic assembly technology TAKIGUCHI Masaki Abstract Construction machinery is equipped with
On the role of AI in autonomous driving: prospects and challenges
 On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics.
 Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics. http://dx.doi.org/10.3991/ijoe.v11i6.5033 Matthew Bastin* and R Peter
Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics. http://dx.doi.org/10.3991/ijoe.v11i6.5033 Matthew Bastin* and R Peter
UAV KF-1 helicopter. CopterCam UAV KF-1 helicopter specification
 UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
Mobile Robots Introduction and Lecture Overview
 ASL Autonomous Systems Lab Mobile Robots Introduction and Lecture Overview Autonomous Mobile Robots Roland Siegwart Margarita Chli, Paul Furgale, Marco Hutter, Martin Rufli, Davide Scaramuzza Autonomous
ASL Autonomous Systems Lab Mobile Robots Introduction and Lecture Overview Autonomous Mobile Robots Roland Siegwart Margarita Chli, Paul Furgale, Marco Hutter, Martin Rufli, Davide Scaramuzza Autonomous
Cilantro. Old Dominion University. Team Members:
 Cilantro Old Dominion University Faculty Advisor: Dr. Lee Belfore Team Captain: Michael Micros lbelfore@odu.edu mmicr001@odu.edu Team Members: Ntiana Sakioti Matthew Phelps Christian Lurhakumbira nsaki001@odu.edu
Cilantro Old Dominion University Faculty Advisor: Dr. Lee Belfore Team Captain: Michael Micros lbelfore@odu.edu mmicr001@odu.edu Team Members: Ntiana Sakioti Matthew Phelps Christian Lurhakumbira nsaki001@odu.edu
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
Smart Control for Electric/Autonomous Vehicles
 Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
Vehicle Dynamic Simulation Using A Non-Linear Finite Element Simulation Program (LS-DYNA)
") Vehicle Dynamic Simulation Using A Non-Linear Finite Element Simulation Program (LS-DYNA) G. S. Choi and H. K. Min Kia Motors Technical Center 3-61 INTRODUCTION The reason manufacturers invest their time
Vehicle Dynamic Simulation Using A Non-Linear Finite Element Simulation Program (LS-DYNA) G. S. Choi and H. K. Min Kia Motors Technical Center 3-61 INTRODUCTION The reason manufacturers invest their time
Seventh Framework Programme THEME: AAT Breakthrough and emerging technologies Call: FP7-AAT-2012-RTD-L0 AGEN
 Seventh Framework Programme THEME: AAT.2012.6.3-1. Breakthrough and emerging technologies Call: FP7-AAT-2012-RTD-L0 AGEN Atomic Gyroscope for Enhanced Navigation Grant agreement no.: 322466 Publishable
Seventh Framework Programme THEME: AAT.2012.6.3-1. Breakthrough and emerging technologies Call: FP7-AAT-2012-RTD-L0 AGEN Atomic Gyroscope for Enhanced Navigation Grant agreement no.: 322466 Publishable
Switching Control for Smooth Mode Changes in Hybrid Electric Vehicles
 Switching Control for Smooth Mode Changes in Hybrid Electric Vehicles Kerem Koprubasi (1), Eric Westervelt (2), Giorgio Rizzoni (3) (1) PhD Student, (2) Assistant Professor, (3) Professor Department of
Switching Control for Smooth Mode Changes in Hybrid Electric Vehicles Kerem Koprubasi (1), Eric Westervelt (2), Giorgio Rizzoni (3) (1) PhD Student, (2) Assistant Professor, (3) Professor Department of
Rover Systems Rover Systems 02/29/04
 Rover Systems Rover Systems 02/29/04 ted@roversystems.com Disclaimer: The views, opinions, and/or findings contained in this paper are those of the participating team and should not be interpreted as representing
Rover Systems Rover Systems 02/29/04 ted@roversystems.com Disclaimer: The views, opinions, and/or findings contained in this paper are those of the participating team and should not be interpreted as representing
Odin s Journey. Development of Team Victor Tango s Autonomous Vehicle for the DARPA Urban Challenge. Jesse Hurdus. Dennis Hong. December 9th, 2007
 Odin s Journey Development of Team Victor Tango s Autonomous Vehicle for the DARPA Urban Challenge Dennis Hong Assistant Professor Robotics & Mechanisms Laboratory (RoMeLa) dhong@vt.edu December 9th, 2007
Odin s Journey Development of Team Victor Tango s Autonomous Vehicle for the DARPA Urban Challenge Dennis Hong Assistant Professor Robotics & Mechanisms Laboratory (RoMeLa) dhong@vt.edu December 9th, 2007
University Of California, Berkeley Department of Mechanical Engineering. ME 131 Vehicle Dynamics & Control (4 units)
") CATALOG DESCRIPTION University Of California, Berkeley Department of Mechanical Engineering ME 131 Vehicle Dynamics & Control (4 units) Undergraduate Elective Syllabus Physical understanding of automotive
CATALOG DESCRIPTION University Of California, Berkeley Department of Mechanical Engineering ME 131 Vehicle Dynamics & Control (4 units) Undergraduate Elective Syllabus Physical understanding of automotive
Project-Based Control Education
 Project-Based Control Education All learning is in the learner, not in the teacher Plato Mark W. Spong Donald Biggar Willett Professor Department of Electrical and Computer Engineering and The Coordinated
Project-Based Control Education All learning is in the learner, not in the teacher Plato Mark W. Spong Donald Biggar Willett Professor Department of Electrical and Computer Engineering and The Coordinated
Description of the Locomotion Control Architecture on the ExoMars Rover Breadboard
 Research Collection Conference Paper Description of the Locomotion Control Architecture on the ExoMars Rover Breadboard Author(s): Hoepflinger, Markus; Krebs, Ambroise; Pradalier, Cedric; Lee, C.; Obstei,
Research Collection Conference Paper Description of the Locomotion Control Architecture on the ExoMars Rover Breadboard Author(s): Hoepflinger, Markus; Krebs, Ambroise; Pradalier, Cedric; Lee, C.; Obstei,
Highly dynamic control of a test bench for highspeed train pantographs
 PAGE 26 CUSTOMERS Highly dynamic control of a test bench for highspeed train pantographs Keeping Contact at 300 km/h Electric rail vehicles must never lose contact with the power supply, not even at the
PAGE 26 CUSTOMERS Highly dynamic control of a test bench for highspeed train pantographs Keeping Contact at 300 km/h Electric rail vehicles must never lose contact with the power supply, not even at the
CS 188: Artificial Intelligence
 CS 188: Artificial Intelligence Advanced Applications: Robotics Pieter Abbeel UC Berkeley A few slides from Sebastian Thrun, Dan Klein 2 So Far Mostly Foundational Methods 3 1 Advanced Applications 4 Autonomous
CS 188: Artificial Intelligence Advanced Applications: Robotics Pieter Abbeel UC Berkeley A few slides from Sebastian Thrun, Dan Klein 2 So Far Mostly Foundational Methods 3 1 Advanced Applications 4 Autonomous
Cooperative Autonomous Driving and Interaction with Vulnerable Road Users
 9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
EECS 461 Final Project: Adaptive Cruise Control
 EECS 461 Final Project: Adaptive Cruise Control 1 Overview Many automobiles manufactured today include a cruise control feature that commands the car to travel at a desired speed set by the driver. In
EECS 461 Final Project: Adaptive Cruise Control 1 Overview Many automobiles manufactured today include a cruise control feature that commands the car to travel at a desired speed set by the driver. In
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition
 Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Aerial robots that interact with the environment
 Aerial robots that interact with the environment Guillermo Heredia*, Aníbal Ollero * Professor at University of Seville, Spain Robotics, Vision and Control group (GRVC) guiller@us.es Robotics, Vision and
Aerial robots that interact with the environment Guillermo Heredia*, Aníbal Ollero * Professor at University of Seville, Spain Robotics, Vision and Control group (GRVC) guiller@us.es Robotics, Vision and
LiDAR and the Autonomous Vehicle Revolution for Truck and Ride Sharing Fleets
 July 12, 2017 LiDAR and the Autonomous Vehicle Revolution for Truck and Ride Sharing Fleets Louay Eldada CEO and Co-founder, Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State
July 12, 2017 LiDAR and the Autonomous Vehicle Revolution for Truck and Ride Sharing Fleets Louay Eldada CEO and Co-founder, Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State
Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints
 Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints Lan Yue Ji, Sebatian Bartsch, Frank Kirchner DFKI Bremen & Universität Bremen Robotics Innovations Center Director:
Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints Lan Yue Ji, Sebatian Bartsch, Frank Kirchner DFKI Bremen & Universität Bremen Robotics Innovations Center Director:
Rule-based Integration of Multiple Neural Networks Evolved Based on Cellular Automata
 1 Robotics Rule-based Integration of Multiple Neural Networks Evolved Based on Cellular Automata 2 Motivation Construction of mobile robot controller Evolving neural networks using genetic algorithm (Floreano,
1 Robotics Rule-based Integration of Multiple Neural Networks Evolved Based on Cellular Automata 2 Motivation Construction of mobile robot controller Evolving neural networks using genetic algorithm (Floreano,
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS
 MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
DELHI TECHNOLOGICAL UNIVERSITY TEAM RIPPLE Design Report
 DELHI TECHNOLOGICAL UNIVERSITY TEAM RIPPLE Design Report May 16th, 2018 Faculty Advisor Statement: I hereby certify that the development of vehicle, described in this report has been equivalent to the
DELHI TECHNOLOGICAL UNIVERSITY TEAM RIPPLE Design Report May 16th, 2018 Faculty Advisor Statement: I hereby certify that the development of vehicle, described in this report has been equivalent to the
Introducing Galil's New H-Bot Firmware
 March-16 Introducing Galil's New H-Bot Firmware There are many applications that require movement in planar space, or movement along two perpendicular axes. This two dimensional system can be fitted with
March-16 Introducing Galil's New H-Bot Firmware There are many applications that require movement in planar space, or movement along two perpendicular axes. This two dimensional system can be fitted with
MEMS Sensors for automotive safety. Marc OSAJDA, NXP Semiconductors
 MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
INTRODUCTION Team Composition Electrical System
 IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
NIMA RASHVAND MODELLING & CRUISE CONTROL OF A MOBILE MACHINE WITH HYDROSTATIC POWER TRANSMISSION
 I NIMA RASHVAND MODELLING & CRUISE CONTROL OF A MOBILE MACHINE WITH HYDROSTATIC POWER TRANSMISSION MASTER OF SCIENCE THESIS Examiners: Professor Kalevi Huhtala Dr Reza Ghabcheloo The thesis is approved
I NIMA RASHVAND MODELLING & CRUISE CONTROL OF A MOBILE MACHINE WITH HYDROSTATIC POWER TRANSMISSION MASTER OF SCIENCE THESIS Examiners: Professor Kalevi Huhtala Dr Reza Ghabcheloo The thesis is approved
Problem Definition Review
 Problem Definition Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team Agenda Background Problem Statement Stakeholders Use Scenario Customer Requirements Engineering Requirements Preliminary Schedule
Problem Definition Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team Agenda Background Problem Statement Stakeholders Use Scenario Customer Requirements Engineering Requirements Preliminary Schedule
BASIC MECHATRONICS ENGINEERING
 MBEYA UNIVERSITY OF SCIENCE AND TECHNOLOGY Lecture Summary on BASIC MECHATRONICS ENGINEERING NTA - 4 Mechatronics Engineering 2016 Page 1 INTRODUCTION TO MECHATRONICS Mechatronics is the field of study
MBEYA UNIVERSITY OF SCIENCE AND TECHNOLOGY Lecture Summary on BASIC MECHATRONICS ENGINEERING NTA - 4 Mechatronics Engineering 2016 Page 1 INTRODUCTION TO MECHATRONICS Mechatronics is the field of study
To put integrity before opportunity To be passionate and persistent To encourage individuals to rise to the occasion
 SignalQuest, based in New Hampshire, USA, designs and manufactures electronic sensors that measure tilt angle, acceleration, shock, vibration and movement as well as application specific inertial measurement
SignalQuest, based in New Hampshire, USA, designs and manufactures electronic sensors that measure tilt angle, acceleration, shock, vibration and movement as well as application specific inertial measurement
Motion Planning Introduction to Optimization Techniques
 Motion Planning Introduction to Optimization Techniques Martin Rufli IBM Research GmbH Margarita Chli, Paul Furgale, Marco Hutter, Davide Scaramuzza, Roland Siegwart Margarita Chli, Paul Furgale, Marco
Motion Planning Introduction to Optimization Techniques Martin Rufli IBM Research GmbH Margarita Chli, Paul Furgale, Marco Hutter, Davide Scaramuzza, Roland Siegwart Margarita Chli, Paul Furgale, Marco
SUMMARY OF STANDARD K&C TESTS AND REPORTED RESULTS
 Description of K&C Tests SUMMARY OF STANDARD K&C TESTS AND REPORTED RESULTS The Morse Measurements K&C test facility is the first of its kind to be independently operated and made publicly available in
Description of K&C Tests SUMMARY OF STANDARD K&C TESTS AND REPORTED RESULTS The Morse Measurements K&C test facility is the first of its kind to be independently operated and made publicly available in
Environmental Envelope Control
 Environmental Envelope Control May 26 th, 2014 Stanford University Mechanical Engineering Dept. Dynamic Design Lab Stephen Erlien Avinash Balachandran J. Christian Gerdes Motivation New technologies are
Environmental Envelope Control May 26 th, 2014 Stanford University Mechanical Engineering Dept. Dynamic Design Lab Stephen Erlien Avinash Balachandran J. Christian Gerdes Motivation New technologies are
Development of an Autonomous Vehicle for High-speed Navigation and Obstacle Avoidance
 Development of an Autonomous Vehicle for High-speed Navigation and Obstacle Avoidance Jee-Hwan Ryu, Member, IEEE, Dmitriy Ogay, Sergey Bulavintsev, Hyuk Kim, and Jang-Sik Park Abstract This paper introduces
Development of an Autonomous Vehicle for High-speed Navigation and Obstacle Avoidance Jee-Hwan Ryu, Member, IEEE, Dmitriy Ogay, Sergey Bulavintsev, Hyuk Kim, and Jang-Sik Park Abstract This paper introduces
Reliable Reach. Robotics Unit Lesson 4. Overview
 Robotics Unit Lesson 4 Reliable Reach Overview Robots are used not only to transport things across the ground, but also as automatic lifting devices. In the mountain rescue scenario, the mountaineers are
Robotics Unit Lesson 4 Reliable Reach Overview Robots are used not only to transport things across the ground, but also as automatic lifting devices. In the mountain rescue scenario, the mountaineers are
PAVIA FERRARA TORINO PARMA ANCONA FIRENZE ROMA
 1 The ARGO Autonomous Vehicle Massimo Bertozzi 1, Alberto Broggi 2, and Alessandra Fascioli 1 1 Dipartimento di Ingegneria dell'informazione Universita di Parma, I-43100 PARMA, Italy 2 Dipartimento di
1 The ARGO Autonomous Vehicle Massimo Bertozzi 1, Alberto Broggi 2, and Alessandra Fascioli 1 1 Dipartimento di Ingegneria dell'informazione Universita di Parma, I-43100 PARMA, Italy 2 Dipartimento di
ISO 8855 INTERNATIONAL STANDARD. Road vehicles Vehicle dynamics and road-holding ability Vocabulary
 INTERNATIONAL STANDARD ISO 8855 Second edition 2011-12-15 Road vehicles Vehicle dynamics and road-holding ability Vocabulary Véhicules routiers Dynamique des véhicules et tenue de route Vocabulaire Reference
INTERNATIONAL STANDARD ISO 8855 Second edition 2011-12-15 Road vehicles Vehicle dynamics and road-holding ability Vocabulary Véhicules routiers Dynamique des véhicules et tenue de route Vocabulaire Reference
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY
 UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
A Simple and Scalable Force Actuator
 A Simple and Scalable Force Actuator Eduardo Torres-Jara and Jessica Banks Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 200 Technology Square, Cambridge,
A Simple and Scalable Force Actuator Eduardo Torres-Jara and Jessica Banks Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 200 Technology Square, Cambridge,
Mechatronics and the Motor Car
 A46 A45 Mechatronics and the Motor Car Kon-41.5151 seminar Jan Akmal, Prabilson & Param Jolly Slide 1 A45 A46 How many of you have a driving license for a car? How many of you have driven a car? Author;
A46 A45 Mechatronics and the Motor Car Kon-41.5151 seminar Jan Akmal, Prabilson & Param Jolly Slide 1 A45 A46 How many of you have a driving license for a car? How many of you have driven a car? Author;
Design and Navigation of Flying Robots
 Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
CRITICAL SPEED ANALYSIS FOR DUAL ROTOR SYSTEM USING FINITE ELEMENT METHOD
 CRITICAL SPEED ANALYSIS FOR DUAL ROTOR SYSTEM USING FINITE ELEMENT METHOD Kai Sun, Zhao Wan, Huiying Song, Shaohui Wang AVIC Commercial Aircraft Engine Co. Ltd, 3998 South Lianhua Road, 201108 Shanghai,
CRITICAL SPEED ANALYSIS FOR DUAL ROTOR SYSTEM USING FINITE ELEMENT METHOD Kai Sun, Zhao Wan, Huiying Song, Shaohui Wang AVIC Commercial Aircraft Engine Co. Ltd, 3998 South Lianhua Road, 201108 Shanghai,
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
Automated Driving is the declared goal of the automotive industry. Systems evolve from complicated to complex
 Automated Driving is the declared goal of the automotive industry Systems evolve from complicated to complex Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity
Automated Driving is the declared goal of the automotive industry Systems evolve from complicated to complex Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity
LECTURE-23: Basic concept of Hydro-Static Transmission (HST) Systems
 Systems") MODULE-6 : HYDROSTATIC TRANSMISSION SYSTEMS LECTURE-23: Basic concept of Hydro-Static Transmission (HST) Systems 1. INTRODUCTION The need for large power transmissions in tight space and their control
MODULE-6 : HYDROSTATIC TRANSMISSION SYSTEMS LECTURE-23: Basic concept of Hydro-Static Transmission (HST) Systems 1. INTRODUCTION The need for large power transmissions in tight space and their control
Available online at ScienceDirect. IFAC-PapersOnLine (2016)
") Available online at www.sciencedirect.com ScienceDirect IFAC-PapersOnLine 49-15 (2016) 248 253 Human machine interface to manually drive rhombic like vehicles such as transport casks in ITER Pedro Lopes
Available online at www.sciencedirect.com ScienceDirect IFAC-PapersOnLine 49-15 (2016) 248 253 Human machine interface to manually drive rhombic like vehicles such as transport casks in ITER Pedro Lopes
Robert D. Truax. June A uthor... :... Department of Mechanical Engineering May 9, 2008
 Characterization of Side-slip Dynamics in Land Rover LR3 for Improved High Speed Autonomous Control by Robert D. Truax Submitted to the Department of Mechanical Engineering in partial fulfillment of the
Characterization of Side-slip Dynamics in Land Rover LR3 for Improved High Speed Autonomous Control by Robert D. Truax Submitted to the Department of Mechanical Engineering in partial fulfillment of the
University of Michigan s Work Toward Autonomous Cars
 University of Michigan s Work Toward Autonomous Cars RYAN EUSTICE NAVAL ARCHITECTURE & MARINE ENGINEERING MECHANICAL ENGINEERING, AND COMPUTER SCIENCE AND ENGINEERING Roadmap Why automated driving? Next
University of Michigan s Work Toward Autonomous Cars RYAN EUSTICE NAVAL ARCHITECTURE & MARINE ENGINEERING MECHANICAL ENGINEERING, AND COMPUTER SCIENCE AND ENGINEERING Roadmap Why automated driving? Next
Autonomous Mobile Robots and Intelligent Control Issues. Sven Seeland
 Autonomous Mobile Robots and Intelligent Control Issues Sven Seeland Overview Introduction Motivation History of Autonomous Cars DARPA Grand Challenge History and Rules Controlling Autonomous Cars MIT
Autonomous Mobile Robots and Intelligent Control Issues Sven Seeland Overview Introduction Motivation History of Autonomous Cars DARPA Grand Challenge History and Rules Controlling Autonomous Cars MIT
Introduction. Kinematics and Dynamics of Machines. Involute profile. 7. Gears
 Introduction The kinematic function of gears is to transfer rotational motion from one shaft to another Kinematics and Dynamics of Machines 7. Gears Since these shafts may be parallel, perpendicular, or
Introduction The kinematic function of gears is to transfer rotational motion from one shaft to another Kinematics and Dynamics of Machines 7. Gears Since these shafts may be parallel, perpendicular, or
Independent cart technology. Linear Motors provide magnetic propulsion and control of multiple carts
 Independent cart technology Linear Motors provide magnetic propulsion and control of multiple carts Moving conveyors forward Advances in linear motion are changing the way manufacturing and material handling
Independent cart technology Linear Motors provide magnetic propulsion and control of multiple carts Moving conveyors forward Advances in linear motion are changing the way manufacturing and material handling
See more from ABB Review. Additional pictures and videos are available in the ABB Review tablet edition. 6 ABB review 3 15
 See more from ABB Review Additional pictures and videos are available in the ABB Review tablet edition. 6 ABB review 3 15 YuMi Introducing the world s first truly collaborative dual-arm robot that will
See more from ABB Review Additional pictures and videos are available in the ABB Review tablet edition. 6 ABB review 3 15 YuMi Introducing the world s first truly collaborative dual-arm robot that will
QuickStick Repeatability Analysis
 QuickStick Repeatability Analysis Purpose This application note presents the variables that can affect the repeatability of positioning using a QuickStick system. Introduction Repeatability and accuracy
QuickStick Repeatability Analysis Purpose This application note presents the variables that can affect the repeatability of positioning using a QuickStick system. Introduction Repeatability and accuracy
Caliber: Road Quality Profiling
 Caliber: Road Quality Profiling Capstone Design Specification Samuel Quintana John Spencer James Uttaro Damien Hobday CSc 59866 : Senior Design Professor: Jie Wei Brief Team Caliber wants to map the quality
Caliber: Road Quality Profiling Capstone Design Specification Samuel Quintana John Spencer James Uttaro Damien Hobday CSc 59866 : Senior Design Professor: Jie Wei Brief Team Caliber wants to map the quality
RB-Mel-03. SCITOS G5 Mobile Platform Complete Package
 RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
Vehicle functional design from PSA in-house software to AMESim standard library with increased modularity
 Vehicle functional design from PSA in-house software to AMESim standard library with increased modularity Benoit PARMENTIER, Frederic MONNERIE (PSA) Marc ALIRAND, Julien LAGNIER (LMS) Vehicle Dynamics
Vehicle functional design from PSA in-house software to AMESim standard library with increased modularity Benoit PARMENTIER, Frederic MONNERIE (PSA) Marc ALIRAND, Julien LAGNIER (LMS) Vehicle Dynamics