Situation Awareness & Collision Risk Assessment to improve Driving Safety
|
|
|
- Augustus Day
- 5 years ago
- Views:
Transcription
1 Situation Awareness & Collision Risk Assessment to improve Driving Safety Christian LAUGIER Research Director at INRIA - Co-Authors: I. Paromtchik, M. Perrollaz, S. Lefevre, C. Tay Meng Keat, K. Mekhnacha, G. Othmezouri, H. Yanagihara, J. Ibanez-Guzman - INRIA, Toyota, Probayes, Renault - Navigation system Keynote talk at IEEE/RSJ IROS 2011 Workshop on Perception and Navigation for Autonomous Vehicles in Human Environments 1
2 Structure of the talk 1. Context, State of the art, and current Challenges 2. Bayesian Perception 3. Prediction & Collision risk assessment 4. Roads Intersection Safety 5. Conclusion & Perspectives 2
3 Socio-Economic & Technical context Nowadays, Human Society is no more accepting the incredible socioeconomic cost of traffic accidents! 1.2 million fatalities / year in the world!!!! USA (2007) : Accident every 5s => killed & 2.6 million injured. Similar numbers in Europe France (2008): 37 million vehicles & 4443 fatalities (double number in the past years) Driving Safety is now becoming a major issue for both governments (regulations) and automotive industry (technology) Thanks to recent advances in the field of Robotics & ICT technologies, Smart Cars & ITS are gradually becoming a reality => Driving assistance & Autonomous driving, Passive & Active Safety systems, V2V & I2V communications, Green technologies 3
4 Socio-Economic & Technical context Nowadays, Human Society is no more accepting the incredible socioeconomic cost of traffic accidents! 1.2 million fatalities / year in the world!!!! USA (2007) : Accident every 5s => killed & 2.6 million injured. Similar numbers in Europe France (2008): 37 million vehicles & 4443 fatalities (double number in the past years). But a real deployment of these technologies, requires first that Robustness & Safety, Human-Vehicle Driving Safety is now becoming a major for both governments Interaction, and Legal issues have to (regulations) and automotive industry (technology) be more deeply addressed! Thanks to recent advances in the field of Robotics & ICT technologies, Smart Cars & ITS are gradually becoming a reality => Driving assistance & Autonomous driving, Passive & Active Safety systems, V2V & I2V communications, Green technologies 4



")



5 Car technology is almost ready for Driving Assistance & Fully Autonomous Driving Steering by wire Brake by wire Shift by wire Virtual dash-board Modern wheel Navigation system Navigation systems Driving assistance (speed, ABS, ESB ) Wireless Communication Speech Recognition & Synthesis Radar, Cameras, Night Vision, Various sensors, Parking assistance. Cost decreasing & Efficiency increasing (future mass production, SOC, embedded systems )!!!! 5
6 Autonomous Vehicles State of the art (1) An EU driven concept since the 90 s: Cybercars Autonomous Self Service Urban & Green Vehicles Numerous R&D projects in Europe during the past 20 years Several European cities involved Some commercial products already exist for protected areas (e.g. airports, amusement parks ), e.g. Robosoft, Get2There 6

, e.g.")
7 Autonomous Vehicles State of the art (1) An EU driven concept since the 90 s: Cybercars Autonomous Self Service Urban Green Vehicles Numerous R&D projects in Europe during the past 20 years Several European cities involved Some commercial products already exist for protected areas (e.g. airports, amusement parks ), e.g. Robosoft, Get2There Several early large scale public experiments in Europe Floriade 2002 (Amsterdam) Shanghai public demo 2007 (Inria cooperation, EU FP7 project) 7
8 Autonomous Vehicles State of the art (2) Fully Autonomous Driving More than 20 years of research, for both Off-road & Road Vehicles Significant recent steps towards fully autonomous driving (partly pushed forward by events such as DARPA Grand & Urban Challenges) Fully Autonomous driving is gradually becoming a reality, for both the Technical & Legal point of views!!! June 22, 2011 : Nevada passes Law Authorizing Driverless Cars (Rules & Regulations to be defined by DOT) 8
 Fully Autonomous driving is gradually becoming a reality, for both the Technical &")
 Some major recent events 2010 VIAC Intercontinental Autonomous")

9 Autonomous Vehicles State of the art (2) Fully Autonomous Driving More than 20 years of research, for both Off-road & Road Vehicles Significant recent steps towards fully autonomous driving (partly pushed forward by events such as DARPA Grand & Urban Challenges) Fully Autonomous driving is gradually becoming a reality, for both the Technical & Legal point of views!!! June 22, 2011 : Nevada passes Law Authorizing Driverless Cars (Rules & Regulations to be defined by DOT) Some major recent events 2010 VIAC Intercontinental Autonomous Challenge : km covered, 3 months race, leading vehicle + followers => See last IEEE RAM issue 2007 Darpa Urban Challenge : 97 km, 50 C. manned LAUGIER & unmanned Situation Awareness vehicles, & 35 Collision teams, Risk 11 Assessment to improve Driving Safety IROS qualified, 2011 Workshop 6 finished «Perception the race & Navigation for Autonomous Vehicles», San Francisco, Sept Google s Car: A fleet of 6 automated Toyota Priuses, miles covered on California roads with occasional human interventions 9



10 Autonomous Vehicles Current Limitations Current Autonomous vehicles are able to exhibit quite impressive skills. BUT they are not yet fully adapted to human environments and they are often Unsafe! => DARPA Grand Challenge 2004 Significant step towards Motion Autonomy But still some Uncontrolled Behaviors!!!! => URBAN Challenge 2007 A large step towards road environments But still some accidents, even at low speed!!! Some technologies are almost ready for use in some restricted and/or protected public areas.. BUT Fully open environments are still beyond the state of the art Safety is still not guaranteed Too many costly sensors are still required 10



11 Technologies to be improved Situation awareness & Risk assessment Traffic scene understanding Dynamicity & Uncertainty => Space & Time + Probabilities Interpretation ambiguities => History, context, behaviors Prediction of future states => Avoiding future collisions!! Share driving decisions & Safe interaction with human beings But... Human drivers is a potential danger for himself (inattention, wrong reflexes)! => Monitoring & Interpreting driver actions is mandatory Human beings are unbeatable in taking decisions in complex situations Technology is better for simple but fast control decisions (ABS, ESP ) 11
12 Outline of our approach Two key technologies Bayesian Perception Monitor the traffic environment using on-board sensors (Stereo Vision, Lidars, IMU, GPS, Odometry) Perform data fusion of multiple sensors by means of Bayesian Occupancy Filtering (BOF) => Patent INRIA-Probayes Process dynamic scenes in real time to Detect & Track multiple moving objects (BOF + FCTA) Prediction & Collision Risk Assessment Predict scene changes & Evaluate Collision Risks using stochastic variables, HMM and Gaussian Process (GP) => Patent INRIA-Toyota-Probayes Prevent future collisions: Alert the driver and/or activate Automated braking and steering 12
13 Structure of the talk 1. Context, State of the art, and current Challenges 2. Bayesian Perception 3. Prediction & Collision risk assessment 4. Roads Intersection Safety 5. Conclusion & Perspectives 13
![Bayesian Occupancy Filter Improving sensing robustness Patented by INRIA & Probayes Commercialized by Probayes [Coué & Laugier IJRR 05]](/docs-images/90/101614852/images/14-6.jpg "Bayesian Occupancy Filter (BOF) Continuous Dynamic environment modelling using one or several sensors Grid approach based on Bayesian")

 Stationary objects Free space Weak occupancy probability in V 0 -slice Occupied space (obstacle) OG (V 0 -slice) P([O c")
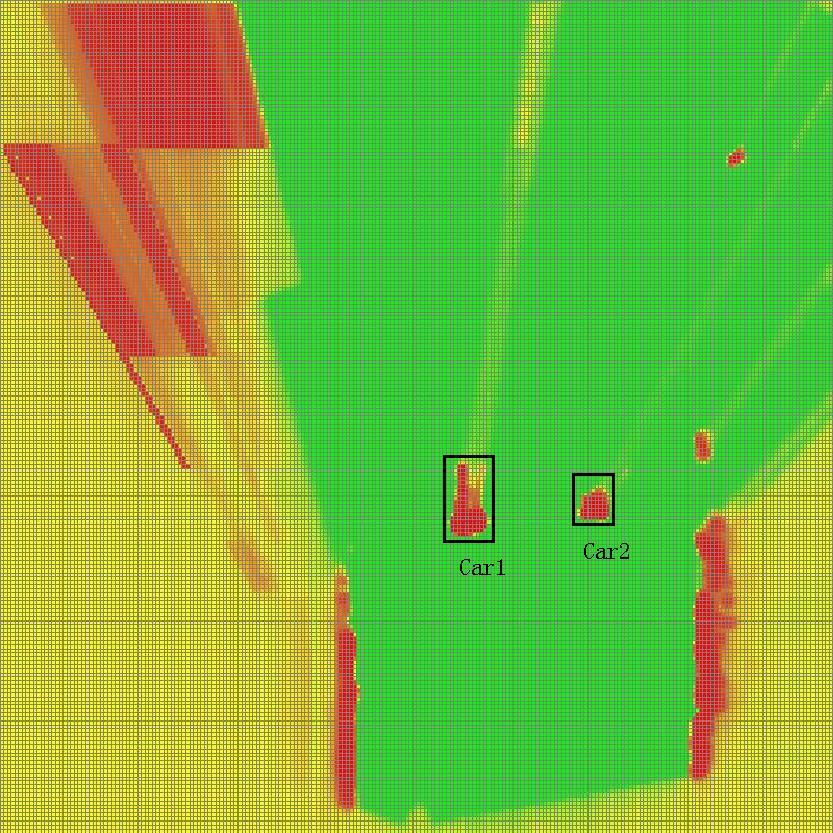
14 Bayesian Occupancy Filter Improving sensing robustness Patented by INRIA & Probayes Commercialized by Probayes [Coué & Laugier IJRR 05] Bayesian Occupancy Filter (BOF) Continuous Dynamic environment modelling using one or several sensors Grid approach based on Bayesian Filtering Estimates at each time step the Occupation & Velocity probabilities for each cell in a Space-Velocity grid Computation performed using probabilistic Sensor & Dynamic models => More robust to Sensing errors & Temporary occultation => Designed for Sensor Fusion & Parallel processing Occupancy probability + Velocity probability Moving object Unobservable space Concealed space ( shadow of the obstacle) Stationary objects Free space Weak occupancy probability in V 0 -slice Occupied space (obstacle) OG (V 0 -slice) P([O c =occ] z 1 z 2 z 3 ) 14
 Autonomous Vehicle (Cycab) Parked Vehicle (occultation) Thanks to")

15 Conservative prediction using the BOF Application to Collision Anticipation (tracking + conservative hypotheses) Autonomous Vehicle (Cycab) Parked Vehicle (occultation) Thanks to the prediction capability of the BOF technology, the Autonomous Vehicle anticipates the behavior of the pedestrian and brakes (even if the pedestrian is temporarily hidden by the parked vehicle) 15



16 Bayesian Sensor Fusion + Detection & Tracking BOF Fusion + FCTA Data association is performed as lately as possible More robust to Perception errors & Temporary occlusions [Mekhnacha et al 08] Fast Clustering and Tracking Algorithm (FCTA) Successfully tested in real traffic conditions using industrial datasets (Toyota, Denso) 16
 17")
17 Experimentations performed with the INRIA Lexus Platform Inertial sensor / GPS Xsens MTi-G Dell computer + GPU + SSD memory Stereo camera TYZX Toyota Lexus LS600h 2 Lidars IBEO Lux GPS track example (Using Open Street Map) 17


18 Bayesian Sensor Fusion Stereo Vision component From camera Matching / Pixels classification (Road/Obstacle) Stereo processor U-disparity projections U-disparity grid computation Stereo sensor model Remap to Cartesian Grid To BOF 6 ms for 500 x 312 pixels and 52 disparity values Left image obstacle u-disparity road u-disparity Cartesian Occupancy Grid Occupancy grid from u-disparity U-disparity Occupancy Grid is superimposed on the camera image 18

![[Paromtchik et al 10] Front view](/docs-images/90/101614852/images/19-6.jpg "from left camera Fusion result")

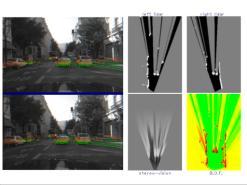
19 Sensor Fusion experiment: Stereo + 2 Lidars [Perrollaz et al 10] [Paromtchik et al 10] Front view from left camera Fusion result using BOF OG from left Lidar OG from right Lidar OG from Stereo 19
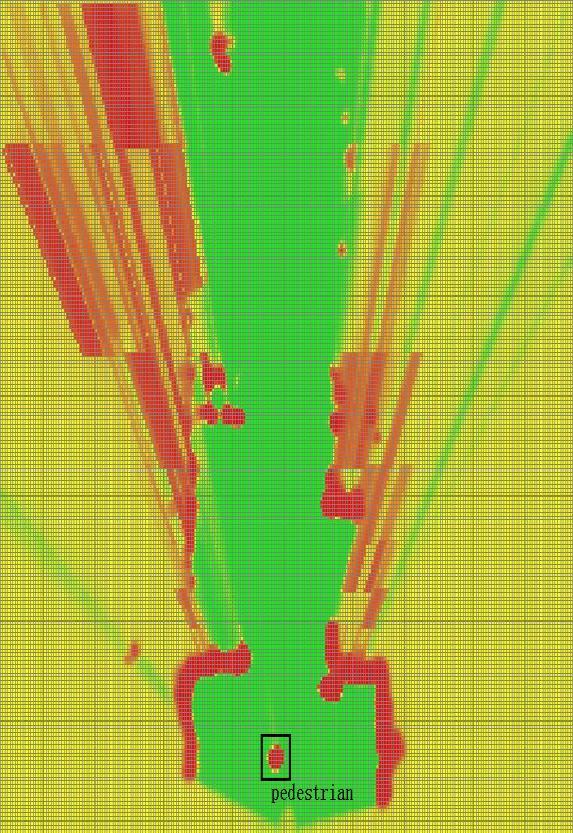
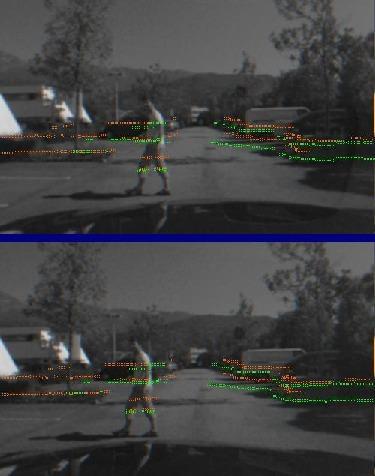

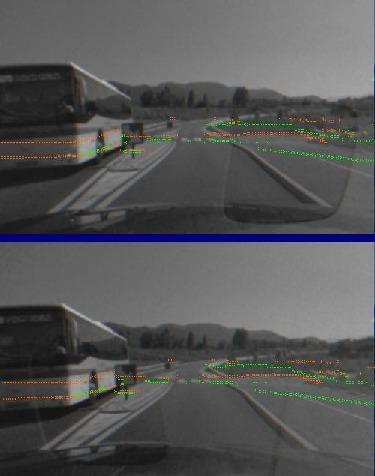
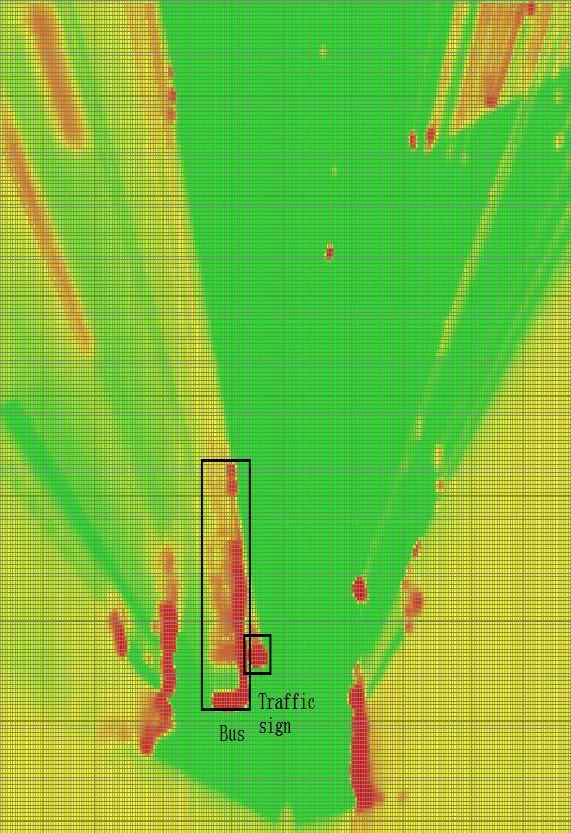
20 Some experimental Sensor Fusion results Pedestrian walking Movie Bus & Traffic sign Cars on highway 20
21 Structure of the talk 1. Context, State of the art, and current Challenges 2. Bayesian Perception 3. Prediction & Collision risk assessment 4. Roads Intersection Safety 5. Conclusion & Perspectives 21
22 Collision Risk Assessment Problem statement Behavior Prediction + Probabilistic Risk Assessment Previous observations False alarm! Conservative hypotheses TTC-based crash warning is not sufficient! Consistent Prediction & Risk Assessment requires to reason about : History of obstacles Positions & Velocities (perception or communications) Obstacles expected Behaviors e.g. turning, overtaking, crossing... Road geometry e.g. lanes, curves, intersections using GIS 22

23 Collision Risk Assessment Our approach 1. Driving Behavior Modeling & Learning Modeling behaviors using x-hmm + Learning 2. Driving Behavior Recognition Estimate the probability distribution of the feasible behaviors 3. Driving Behavior Realization All possible car motions when executing a given behavior is represented by a GP. The adaptation of GP to a given behavior is performed using a geometrical transformation known as least square conformal map (LSCM) 4. Probabilistic Collision Risk estimation It is calculated for a few seconds ahead from the probability distributions over Behaviors (Behavior recognition & Behavior realization) 23

")

24 Motion prediction Learn & Predict approach Euron PhD Thesis Award 09 Observe & Learn typical motions Continuously Learn & Predict Learn => GHMM & Topological maps (SON) Predict => Exact inference, linear complexity [Vasquez 07] Experiments using Leeds parking data 24
25 Collision Risk Assessment Functional Architecture Patent INRIA & Toyota 2009 [Tay 09] [Laugier et al 11] Estimate the probability of the feasible driving behaviors Probabilistic representation of a possible evolution of a car motion for a given behavior Probabilistic Collision Risk: Calculated for a few seconds ahead from the probability distributions over Behaviors Recognition & Realization 25

26 Collision Risk Assessment Behaviors Recognition Behaviors Modeling: Hierarchical HMM (learned from driving observations) e.g. Overtaking => Lane change, Accelerate Behaviors Prediction: Probability distribution of the feasible behaviors Behavior belief table Behavior Prediction Behaviors models Observations 26
 and to an other Vehicle (A) Canonical GP deformed according to the road geometry (using LSCM) Probabilistic Collision")
 using mapped past n position observation Risk")
27 Collision Risk Assessment Behaviors Realization & Risk Overtaking TurningLeft TurningRight ContinuingStraightAhead Driving Behaviors Realization & Uncertainty: Gaussian Process GP: Gaussian distribution over functions Example : Two GPs associated to the Ego Vehicle (B) and to an other Vehicle (A) Canonical GP deformed according to the road geometry (using LSCM) Probabilistic Collision Risk Assessment: Sampling of trajectories from GP : Fraction of samples in collision gives the risk of collision associated to the behavior represented by GP General risk value is obtained by marginalizing over behaviors based on the probability distribution over behaviors obtained from the layered HMM [Tay 09] Probability distribution (GP) using mapped past n position observation Risk Assessment 0,6 0,5 0,4 0,3 0,2 0,1 0 Behavior belief table for each vehicle in the scene Behaviour Probability+ Evaluation Road geometry (GIS) + Ego vehicle trajectory to evaluate Collision probability for ego vehicle 27

 An other vehicle Behavior Prediction (HMM)")
 Probability+ 0 Evaluation Behavior")

28 Collision Risk Assessment Simulation results Overtaking TurningLeft TurningRight ContinuingStraightAhead Overtaking TurningLeft TurningRight ContinuingStraightAhead Ego vehicle Risk estimation (Gaussian Process) Experimental validation: Toyota Simulator + Driving device Ego vehicle High-level Behavior prediction for other vehicles (Observations + HMM) An other vehicle Behavior Prediction (HMM) Observations + 0,5 0,4 0,3 0,2 0,1 Prediction 0 Behavior models 0,6 Behavior Behaviour Probability belief table 0,6 0,5 Risk 0,4 0,3 Behaviour Assessment 0,2 0,1 (GP) Probability+ 0 Evaluation Behavior belief table for Road geometry (GIS) + Ego IROS 2011 Workshop «Perception each vehicle & Navigation in the scene for Autonomous vehicle Vehicles trajectory», San Francisco, to evaluate Sept Collision probability for ego vehicle 28


29 Collision Risk Assessment Experimental results (Real data) Equipped Toyota Lexus Stereo camera Ibeo Lux IMU + GPS + Odometry Behaviors prediction on a highway (Real time) Cooperation Toyota & Probayes Performance summary (statistics) 29
30 Structure of the talk 1. Context, State of the art, and current Challenges 2. Bayesian Perception 3. Prediction & Collision risk assessment 4. Roads Intersection Safety 5. Conclusion & Perspectives 30


31 Maneuvers prediction at roads intersections Cooperation Stanford & Renault Scenario A vehicle is approaching, then crossing an intersection Available information => perception, previous mapping, communication... Digital map of the road network State of the vehicle: position, orientation, turn signal Associated uncertainty Objective [Lefevre & Laugier & Guzman IV 11] At any t, Estimate the Manoeuvre Intention of the driver of the approaching vehicle 31
, by observing real traffic Intersection 1 Intersection 2 Stanford s Junior Vehicle")

32 Digital map & Typical paths acquisition Intersection map obtained using Google Map, an annotated using the RNDF format Typical paths are obtained with a 3D laser (velodyne), by observing real traffic Intersection 1 Intersection 2 Stanford s Junior Vehicle (parked) 40 recorded trajectories have been manually annotated 2 datasets have been constructed with these trajectories, by automatically annotating the turn signal 40 trajectories with consistent turn signal 40 trajectories with inconsistent turn signal 32
![Intersection model & Maneuvers prediction [Lefevre & Laugier & Guzman IV 11] Modeling a road intersection (using RDNF](/docs-images/90/101614852/images/33-5.jpg "format) Road R i Entrance lane L i Exit lane M i (= Maneuver) Exemplar path P i (one per authorized crossing maneuver)")
 o Rule-based probabilistic")
33 Intersection model & Maneuvers prediction [Lefevre & Laugier & Guzman IV 11] Modeling a road intersection (using RDNF format) Road R i Entrance lane L i Exit lane M i (= Maneuver) Exemplar path P i (one per authorized crossing maneuver) Predicting Maneuvers: Bayesian Networks with uncertain evidence Variables and decomposition Specification of the conditional probabilities o Extract relevant information from the digital map (generic) o Rule-based probabilistic algorithm 33
34 Experimental evaluation : Qualitative Results Consistent turn signal Inconsistent turn signal 34
35 Experimental evaluation : Quantitative Results Definitions m A, m B = most probable manoeuvre and second most probable manoeuvre Undecidable prediction: P(m A ) - P(m B ) 0.2 Incorrect prediction: P(m A ) - P(m B ) > 0.2 and m A is incorrect Correct prediction: P(m A ) - P(m B ) > 0.2 and m A is correct Results on 2 datasets (40 trajectories each) Consistent turn signal Inconsistent turn signal Entrance Exit 35
 Parking Assistant (e.g.")


36 Conclusion Thanks to recent advances in the field of Robotics & ICT technologies, Smart Cars & ITS are gradually becoming a reality Camera & Radar detection Automatic braking (below 25km/h) Parking Assistant (e.g. Toyota Prius) Volvo Pedestrian avoidance system (2010) First implemented system (Laugier & Paromtchik 97) Fully Autonomous Driving (2025?) Bayesian Perception, Prediction and Collision Risk Assessment are key components for improving System Robustness & Driving Safety Further work is still needed for: Addressing more complex traffic situations involving human beings Improving the embedded system efficiency Performing intensive testing & ground truth 36
37 Thank You for your attention Any Questions? Some related publications Handbook of Intelligent Vehicle, Part on Autonomous Vehicles (C. Laugier, Guest editor), To appear Nov C. Coue, C. Pradalier, C. Laugier, T. Fraichard, P. Bessiere, Bayesian Occupancy Filtering for Multitarget Tracking: An Automotive Application, Int. J. Robotics Research, No. 1, M. Perrollaz, J.-D. Yoder, C. Laugier, Using Obstacle and Road Pixels in the Disparity Space Computation of Stereo-vision based Occupancy Grids, Proc. of the IEEE Int. Conf. on Intelligent Transportation Systems, Madeira, Portugal, Sept , I. E. Paromtchik, C. Laugier, M. Perrollaz, A. Negre, M. Yong, C. Tay, The ArosDyn project: Robust analysis of dynamic scenes, Int. Conf. on Control, Automation, Robotics, and Vision, Singapore, Dec S. Lefevre, C. Laugier, J. Ibanez-Guzman, Exploiting Map Information for Driver Intention Estimation at Road Intersections, IEEE Intelligent Vehicles Symp., Germany, June I. E. Paromtchik, M. Perrollaz, C. Laugier, "Fusion of Telemetric and Visual Data from Road Scenes with a Lexus Experimental Platform," IEEE Intelligent Vehicles Symp., Germany, June C. Laugier, I. E. Paromtchik, C. Tay, K. Mekhnacha, G. Othmezouri, H. Yanagahira, "Collision Risk Assessment to Improve Driving Safety," IEEE/RSJ IROS, San Francisco, USA, Sept (Keynote talk in Workshop "Perception & Navigation for Autonomous Vehicles in Human Environments"). C. Laugier et al. "Probabilistic Analysis of Dynamic Scenes and Collision Assessment to Improve Driving Safety," ITS Magazine, 2011 (to appear soon). K. Mekhnacha, Y. Mao, D. Raulo, C. Laugier, Bayesian Occupancy Filter based Fast Clustering-Tracking algorithm, IEEE/RSJ IROS, Nice, France, Sept. C. LAUGIER Situation Awareness & Collision Risk Assessment to improve Driving Safety 37 C. Fulgenzi, A. Spalanzani, C. Laugier, "Probabilistic Motion Planning among Moving Obstacles Following typical motion patterns," IEEE/RSJ IROS, St.
Keynote talk, Int. Conf. Innovations for Next Generation Automobiles Sendai (October 2014)
") Key Technologies for Addressing the Challenge of Autonomous Vehicles Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias Perrollaz,
Key Technologies for Addressing the Challenge of Autonomous Vehicles Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias Perrollaz,
ICT Technologies for Next Car Generation
 ICT Technologies for Next Car Generation Christian LAUGIER Research Director at INRIA Deputy Director of the LIG Laboratory (Grenoble France) French / Japanese Workshop on ICT Paris, Nov. 19-20 2009 Socio-Economic
ICT Technologies for Next Car Generation Christian LAUGIER Research Director at INRIA Deputy Director of the LIG Laboratory (Grenoble France) French / Japanese Workshop on ICT Paris, Nov. 19-20 2009 Socio-Economic
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
Cooperative Autonomous Driving and Interaction with Vulnerable Road Users
 9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
Autnonomous Vehicles: Societal and Technological Evolution (Invited Contribution)
") Autnonomous Vehicles: Societal and Technological Evolution (Invited Contribution) Christian Laugier To cite this version: Christian Laugier. Autnonomous Vehicles: Societal and Technological Evolution (Invited
Autnonomous Vehicles: Societal and Technological Evolution (Invited Contribution) Christian Laugier To cite this version: Christian Laugier. Autnonomous Vehicles: Societal and Technological Evolution (Invited
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help?
 Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
CONNECTED AUTOMATION HOW ABOUT SAFETY?
 CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS
 EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
Unmanned autonomous vehicles in air land and sea
 based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA.
 GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
Introduction Projects Basic Design Perception Motion Planning Mission Planning Behaviour Conclusion. Autonomous Vehicles
 Dipak Chaudhari Sriram Kashyap M S 2008 Outline 1 Introduction 2 Projects 3 Basic Design 4 Perception 5 Motion Planning 6 Mission Planning 7 Behaviour 8 Conclusion Introduction Unmanned Vehicles: No driver
Dipak Chaudhari Sriram Kashyap M S 2008 Outline 1 Introduction 2 Projects 3 Basic Design 4 Perception 5 Motion Planning 6 Mission Planning 7 Behaviour 8 Conclusion Introduction Unmanned Vehicles: No driver
University of Michigan s Work Toward Autonomous Cars
 University of Michigan s Work Toward Autonomous Cars RYAN EUSTICE NAVAL ARCHITECTURE & MARINE ENGINEERING MECHANICAL ENGINEERING, AND COMPUTER SCIENCE AND ENGINEERING Roadmap Why automated driving? Next
University of Michigan s Work Toward Autonomous Cars RYAN EUSTICE NAVAL ARCHITECTURE & MARINE ENGINEERING MECHANICAL ENGINEERING, AND COMPUTER SCIENCE AND ENGINEERING Roadmap Why automated driving? Next
FANG Shouen Tongji University
 Introduction to Dr. Fang Shou en Communist Party secretary of Tongji University; Doctoral supervisor in Tongji University; Executive director of China Intelligent Transportation Systems Association (CITSA)
Introduction to Dr. Fang Shou en Communist Party secretary of Tongji University; Doctoral supervisor in Tongji University; Executive director of China Intelligent Transportation Systems Association (CITSA)
A Communication-centric Look at Automated Driving
 A Communication-centric Look at Automated Driving Onur Altintas Toyota ITC Fellow Toyota InfoTechnology Center, USA, Inc. November 5, 2016 IEEE 5G Summit Seattle Views expressed in this talk do not necessarily
A Communication-centric Look at Automated Driving Onur Altintas Toyota ITC Fellow Toyota InfoTechnology Center, USA, Inc. November 5, 2016 IEEE 5G Summit Seattle Views expressed in this talk do not necessarily
Smart Control for Electric/Autonomous Vehicles
 Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
Cooperative brake technology
 Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
On the role of AI in autonomous driving: prospects and challenges
 On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
Leveraging AI for Self-Driving Cars at GM. Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel
 Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
Le développement technique des véhicules autonomes
 Shaping the future Le développement technique des véhicules autonomes Renaud Dubé, Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Fribourg, 23 Juin 2016 Renaud Dubé 23.06.2016 1 Content
Shaping the future Le développement technique des véhicules autonomes Renaud Dubé, Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Fribourg, 23 Juin 2016 Renaud Dubé 23.06.2016 1 Content
Highly Automated Driving: Fiction or Future?
 The future of driving. Final Event Highly Automated Driving: Fiction or Future? Prof. Dr. Jürgen Leohold Volkswagen Group Research Motivation The driver as the unpredictable factor: Human error is the
The future of driving. Final Event Highly Automated Driving: Fiction or Future? Prof. Dr. Jürgen Leohold Volkswagen Group Research Motivation The driver as the unpredictable factor: Human error is the
SAFERIDER Project FP SAFERIDER Andrea Borin November 5th, 2010 Final Event & Demonstration Leicester, UK
 SAFERIDER Project FP7-216355 SAFERIDER Advanced Rider Assistance Systems Andrea Borin andrea.borin@ymre.yamaha-motor.it ARAS: Advanced Rider Assistance Systems Speed Alert Curve Frontal Collision Intersection
SAFERIDER Project FP7-216355 SAFERIDER Advanced Rider Assistance Systems Andrea Borin andrea.borin@ymre.yamaha-motor.it ARAS: Advanced Rider Assistance Systems Speed Alert Curve Frontal Collision Intersection
CSE 352: Self-Driving Cars. Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark
 CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
Új technológiák a közlekedésbiztonság jövőjéért
 Új technológiák a közlekedésbiztonság jövőjéért Dr. Szászi István Occupant Safety Robert Bosch Kft. 1 Outline 1. Active and Passive Safety - definition 2. Driver Information Functions 3. Driver Assistance
Új technológiák a közlekedésbiztonság jövőjéért Dr. Szászi István Occupant Safety Robert Bosch Kft. 1 Outline 1. Active and Passive Safety - definition 2. Driver Information Functions 3. Driver Assistance
Formal Methods will not Prevent Self-Driving Cars from Having Accidents
 Formal Methods will not Prevent Self-Driving Cars from Having Accidents Thierry Fraichard INRIA, LIG-CNRS and Grenoble University Forum Méthodes Formelles Mardi 10 octobre 2017 From Mobile Robots to Self-Driving
Formal Methods will not Prevent Self-Driving Cars from Having Accidents Thierry Fraichard INRIA, LIG-CNRS and Grenoble University Forum Méthodes Formelles Mardi 10 octobre 2017 From Mobile Robots to Self-Driving
BMW GROUP TECHNOLOGY WORKSHOPS AUTOMATED DRIVING-DIGITALIZATION MOBILITY SERVICES. December 2016
 BMW GROUP TECHNOLOGY WORKSHOPS AUTOMATED DRIVING-DIGITALIZATION MOBILITY SERVICES December 2016 DISCLAIMER. This document contains forward-looking statements that reflect BMW Group s current views about
BMW GROUP TECHNOLOGY WORKSHOPS AUTOMATED DRIVING-DIGITALIZATION MOBILITY SERVICES December 2016 DISCLAIMER. This document contains forward-looking statements that reflect BMW Group s current views about
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE. CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development
 AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
China Intelligent Connected Vehicle Technology Roadmap 1
 China Intelligent Connected Vehicle Technology Roadmap 1 Source: 1. China Automotive Engineering Institute, , Oct. 2016 1 Technology Roadmap 1 General
China Intelligent Connected Vehicle Technology Roadmap 1 Source: 1. China Automotive Engineering Institute, , Oct. 2016 1 Technology Roadmap 1 General
Deep Learning Will Make Truly Self-Driving Cars a Reality
 Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
THE FUTURE OF AUTONOMOUS CARS
 Index Table of Contents Table of Contents... i List of Figures... ix Executive summary... 1 1 Introduction to autonomous cars... 3 1.1 Definitions and classifications... 3 1.2 Brief history of autonomous
Index Table of Contents Table of Contents... i List of Figures... ix Executive summary... 1 1 Introduction to autonomous cars... 3 1.1 Definitions and classifications... 3 1.2 Brief history of autonomous
REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE. Alex Haag Munich,
 REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE Alex Haag Munich, 10.10.2017 10/9/17 Regulatory Approval of an AI-based Autonomous Vehicle 2 1 INTRO Autonomous Intelligent Driving, GmbH Launched
REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE Alex Haag Munich, 10.10.2017 10/9/17 Regulatory Approval of an AI-based Autonomous Vehicle 2 1 INTRO Autonomous Intelligent Driving, GmbH Launched
Vehicles at Volkswagen
 Autonomous Driving and Intelligent Vehicles at Volkswagen Dirk Langer, Ph.D. VW Autonomous Driving Story 2000 2003 2006 Robot Klaus Purpose: Replace test drivers on poor test tracks (job safety) Robot
Autonomous Driving and Intelligent Vehicles at Volkswagen Dirk Langer, Ph.D. VW Autonomous Driving Story 2000 2003 2006 Robot Klaus Purpose: Replace test drivers on poor test tracks (job safety) Robot
Automated Vehicles: Terminology and Taxonomy
 Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017
 IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017 AUTOMATED DRIVING OPENS NEW OPPORTUNITIES FOR CUSTOMERS AND COMMUNITY. MORE SAFETY MORE COMFORT MORE FLEXIBILITY MORE
IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017 AUTOMATED DRIVING OPENS NEW OPPORTUNITIES FOR CUSTOMERS AND COMMUNITY. MORE SAFETY MORE COMFORT MORE FLEXIBILITY MORE
5G V2X. The automotive use-case for 5G. Dino Flore 5GAA Director General
 5G V2X The automotive use-case for 5G Dino Flore 5GAA Director General WHY According to WHO, there were about 1.25 million road traffic fatalities worldwide in 2013, with another 20 50 million injured
5G V2X The automotive use-case for 5G Dino Flore 5GAA Director General WHY According to WHO, there were about 1.25 million road traffic fatalities worldwide in 2013, with another 20 50 million injured
Intuitive Driving: Are We There Yet? Amine Taleb, Ph.D. February 2014 I 1
 Intuitive Driving: Are We There Yet? Amine Taleb, Ph.D. February 2014 I 1 February 2014 Outline Motivation Towards Connected/Automated Driving Valeo s Technologies and Perspective Automated Driving Connected
Intuitive Driving: Are We There Yet? Amine Taleb, Ph.D. February 2014 I 1 February 2014 Outline Motivation Towards Connected/Automated Driving Valeo s Technologies and Perspective Automated Driving Connected
Towards Realizing Autonomous Driving Based on Distributed Decision Making for Complex Urban Environments
 Towards Realizing Autonomous Driving Based on Distributed Decision Making for Complex Urban Environments M.Sc. Elif Eryilmaz on behalf of Prof. Dr. Dr. h.c. Sahin Albayrak Digital Mobility Our vision Intelligent
Towards Realizing Autonomous Driving Based on Distributed Decision Making for Complex Urban Environments M.Sc. Elif Eryilmaz on behalf of Prof. Dr. Dr. h.c. Sahin Albayrak Digital Mobility Our vision Intelligent
Brignolo Roberto, CRF ETSI Workshop Feb, , Sophia Antipolis
 SAFESPOT Integrated Project Co-operative operative Systems for Road Safety Smart Vehicles on Smart Roads Brignolo Roberto, CRF Roberto.Brignolo@crf.it 1 General figures Project type: Integrated Project
SAFESPOT Integrated Project Co-operative operative Systems for Road Safety Smart Vehicles on Smart Roads Brignolo Roberto, CRF Roberto.Brignolo@crf.it 1 General figures Project type: Integrated Project
Cybercars : Past, Present and Future of the Technology
 Cybercars : Past, Present and Future of the Technology Michel Parent*, Arnaud de La Fortelle INRIA Project IMARA Domaine de Voluceau, Rocquencourt BP 105, 78153 Le Chesnay Cedex, France Michel.parent@inria.fr
Cybercars : Past, Present and Future of the Technology Michel Parent*, Arnaud de La Fortelle INRIA Project IMARA Domaine de Voluceau, Rocquencourt BP 105, 78153 Le Chesnay Cedex, France Michel.parent@inria.fr
Driver assistance systems and outlook into automated driving
 Driver assistance systems and outlook into automated driving EAEC-ESFA2015 Bucharest November 2015 1 General presentation of the Bosch Group Some 45,600 1 researchers and developers work at Bosch: at 94
Driver assistance systems and outlook into automated driving EAEC-ESFA2015 Bucharest November 2015 1 General presentation of the Bosch Group Some 45,600 1 researchers and developers work at Bosch: at 94
Driving simulation and Scenario Factory for Automated Vehicle validation
 Driving simulation and Scenario Factory for Automated Vehicle validation Pr. Andras Kemeny Scientific Director, A. V. Simulation Expert Leader, Renault INDEX 1. Introduction of autonomous driving 2. Validation
Driving simulation and Scenario Factory for Automated Vehicle validation Pr. Andras Kemeny Scientific Director, A. V. Simulation Expert Leader, Renault INDEX 1. Introduction of autonomous driving 2. Validation
Perception and Automation for Intelligent Mobility in Dynamic Environments
 Perception and Automation for Intelligent Mobility in Dynamic Environments Lukas Rummelhard, Jerome Lussereau, Jean-Alix David, Christian Laugier, Salvador Dominguez, Gaëtan Garcia, Philippe Martinet To
Perception and Automation for Intelligent Mobility in Dynamic Environments Lukas Rummelhard, Jerome Lussereau, Jean-Alix David, Christian Laugier, Salvador Dominguez, Gaëtan Garcia, Philippe Martinet To
The connected vehicle is the better vehicle!
 AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
AI challenges for Automated & Connected Vehicles
 AI challenges for Automated & Connected Vehicles Pr. Fabien MOUTARDE Center for Robotics MINES ParisTech PSL Université Fabien.Moutarde@mines-paristech.fr http://people.mines-paristech.fr/fabien.moutarde
AI challenges for Automated & Connected Vehicles Pr. Fabien MOUTARDE Center for Robotics MINES ParisTech PSL Université Fabien.Moutarde@mines-paristech.fr http://people.mines-paristech.fr/fabien.moutarde
Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions
 Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions GTC Europe 2017 Dominik Dörr 2 Motivation Virtual Prototypes Virtual Sensor Models CarMaker and NVIDIA DRIVE PX
Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions GTC Europe 2017 Dominik Dörr 2 Motivation Virtual Prototypes Virtual Sensor Models CarMaker and NVIDIA DRIVE PX
Self-Driving Vehicles in the Park
 Self-Driving Vehicles in the Park Bryant Walker Smith Center for Internet and Society Center for Automotive Research cyberlaw.stanford.edu/about/people/bryant-walker-smith 1 A robot by any other name Self-driving
Self-Driving Vehicles in the Park Bryant Walker Smith Center for Internet and Society Center for Automotive Research cyberlaw.stanford.edu/about/people/bryant-walker-smith 1 A robot by any other name Self-driving
COMP 776: Computer Vision
 COMP 776: Computer Vision Basic Info Instructor: Svetlana Lazebnik (lazebnik@cs.unc.edu) Office hours: By appointment, SN 219 Textbook: Forsyth & Ponce, Computer Vision: A Modern Approach Class webpage:
COMP 776: Computer Vision Basic Info Instructor: Svetlana Lazebnik (lazebnik@cs.unc.edu) Office hours: By appointment, SN 219 Textbook: Forsyth & Ponce, Computer Vision: A Modern Approach Class webpage:
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS
 MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
DA to AD systems L3+: An evolutionary approach incorporating disruptive technologies
 DA to AD systems L3+: An evolutionary approach incorporating disruptive technologies Dr. Dieter Hötzer Vice President Business Unit Automated Driving Chassis Systems Control Robert Bosch GmbH Traffic jam
DA to AD systems L3+: An evolutionary approach incorporating disruptive technologies Dr. Dieter Hötzer Vice President Business Unit Automated Driving Chassis Systems Control Robert Bosch GmbH Traffic jam
Citi's 2016 Car of the Future Symposium
 Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
C-ITS status in Europe and Outlook
 C-ITS status in Europe and Outlook Car 2 Car Communication Consortium ITU Seminar 7 th June 2018 Car 2 Car Communication Consortium Communication Technology Basis ITS-G5 Dedicated Short-Range Communication
C-ITS status in Europe and Outlook Car 2 Car Communication Consortium ITU Seminar 7 th June 2018 Car 2 Car Communication Consortium Communication Technology Basis ITS-G5 Dedicated Short-Range Communication
Environmental Envelope Control
 Environmental Envelope Control May 26 th, 2014 Stanford University Mechanical Engineering Dept. Dynamic Design Lab Stephen Erlien Avinash Balachandran J. Christian Gerdes Motivation New technologies are
Environmental Envelope Control May 26 th, 2014 Stanford University Mechanical Engineering Dept. Dynamic Design Lab Stephen Erlien Avinash Balachandran J. Christian Gerdes Motivation New technologies are
Intelligent Drive next LEVEL
 Daimler AG Dr. Eberhard Zeeb Senior Manager Function and Software Driver Assistance Systems Intelligent Drive next LEVEL on the way towards autonomous driving Pioneers of the Automobile Bertha Benz 1888
Daimler AG Dr. Eberhard Zeeb Senior Manager Function and Software Driver Assistance Systems Intelligent Drive next LEVEL on the way towards autonomous driving Pioneers of the Automobile Bertha Benz 1888
Unmanned Surface Vessels - Opportunities and Technology
 Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
CSE 352: Self-Driving Cars. Team 2: Randall Huang Youri Paul Raman Sinha Joseph Cullen
 CSE 352: Self-Driving Cars Team 2: Randall Huang Youri Paul Raman Sinha Joseph Cullen What are Self-Driving Cars A self-driving car, also called autonomous car and driverless car, is a vehicle that is
CSE 352: Self-Driving Cars Team 2: Randall Huang Youri Paul Raman Sinha Joseph Cullen What are Self-Driving Cars A self-driving car, also called autonomous car and driverless car, is a vehicle that is
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF
 AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
Safety for Self-driving Cars
 Tech.AD. 5-6 March, 2018 Berlin Safety for Self-driving Safety for Cars Self-driving Cars -Challenges and Some Solutions -Challenges and Some Solutions Author: Håkan Sivencrona, PhD Functional Jonas Nilsson,
Tech.AD. 5-6 March, 2018 Berlin Safety for Self-driving Safety for Cars Self-driving Cars -Challenges and Some Solutions -Challenges and Some Solutions Author: Håkan Sivencrona, PhD Functional Jonas Nilsson,
The Imperative to Deploy. Automated Driving. CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper
 Stepper") The Imperative to Deploy 1 Automated Driving CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper 2 Paths to the Car of the Future costs roaming e-bike driving enjoyment hybrid electric
The Imperative to Deploy 1 Automated Driving CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper 2 Paths to the Car of the Future costs roaming e-bike driving enjoyment hybrid electric
18th ICTCT Workshop, Helsinki, October Technical feasibility of safety related driving assistance systems
 18th ICTCT Workshop, Helsinki, 27-28 October 2005 Technical feasibility of safety related driving assistance systems Meng Lu Radboud University Nijmegen, The Netherlands, m.lu@fm.ru.nl Kees Wevers NAVTEQ,
18th ICTCT Workshop, Helsinki, 27-28 October 2005 Technical feasibility of safety related driving assistance systems Meng Lu Radboud University Nijmegen, The Netherlands, m.lu@fm.ru.nl Kees Wevers NAVTEQ,
CASCAD. (Causal Analysis using STAMP for Connected and Automated Driving) Stephanie Alvarez, Yves Page & Franck Guarnieri
 Stephanie Alvarez, Yves Page & Franck Guarnieri") CASCAD (Causal Analysis using STAMP for Connected and Automated Driving) Stephanie Alvarez, Yves Page & Franck Guarnieri Introduction: Vehicle automation will introduce changes into the road traffic system
CASCAD (Causal Analysis using STAMP for Connected and Automated Driving) Stephanie Alvarez, Yves Page & Franck Guarnieri Introduction: Vehicle automation will introduce changes into the road traffic system
Aria Etemad Volkswagen Group Research. Key Results. Aachen 28 June 2017
 Aria Etemad Volkswagen Group Research Key Results Aachen 28 June 2017 28 partners 2 // 28 June 2017 AdaptIVe Final Event, Aachen Motivation for automated driving functions Zero emission Reduction of fuel
Aria Etemad Volkswagen Group Research Key Results Aachen 28 June 2017 28 partners 2 // 28 June 2017 AdaptIVe Final Event, Aachen Motivation for automated driving functions Zero emission Reduction of fuel
AdaptIVe: Automated driving applications and technologies for intelligent vehicles
 Jens Langenberg Aachen 06 October 2015 AdaptIVe: Automated driving applications and technologies for intelligent vehicles Facts Budget: European Commission: EUR 25 Million EUR 14,3 Million Duration: 42
Jens Langenberg Aachen 06 October 2015 AdaptIVe: Automated driving applications and technologies for intelligent vehicles Facts Budget: European Commission: EUR 25 Million EUR 14,3 Million Duration: 42
Intelligent Vehicle Systems
 Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
Stereo-vision for Active Safety
 Stereo-vision for Active Safety Project within Vehicle and Traffic Safety, 2009-00078 Author: Vincent Mathevon (Autoliv Electronics AB) Ola Bostrom (Autoliv Development AB) Date: 2012-06-07 Content 1.
Stereo-vision for Active Safety Project within Vehicle and Traffic Safety, 2009-00078 Author: Vincent Mathevon (Autoliv Electronics AB) Ola Bostrom (Autoliv Development AB) Date: 2012-06-07 Content 1.
Machine Learning & Active Safety Using Autonomous Driving and NVIDIA DRIVE PX. Dr. Jost Bernasch Virtual Vehicle Research Center Graz, Austria
 Machine Learning & Active Safety Using Autonomous Driving and NVIDIA DRIVE PX Dr. Jost Bernasch Virtual Vehicle Research Center Graz, Austria VIRTUAL VEHICLE Agenda 1 Open vehicle research platform 3 Austrian
Machine Learning & Active Safety Using Autonomous Driving and NVIDIA DRIVE PX Dr. Jost Bernasch Virtual Vehicle Research Center Graz, Austria VIRTUAL VEHICLE Agenda 1 Open vehicle research platform 3 Austrian
A Presentation on. Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing
 in autonomous vehicles for alerting driver during overtaking and lane changing") A Presentation on Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing Presented By: Abhishek Shriram Umachigi Department of Electrical Engineering
A Presentation on Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing Presented By: Abhishek Shriram Umachigi Department of Electrical Engineering
END TO END NEEDS FOR AUTONOMOUS VEHICLES NORM MARKS SEPT. 6, 2018
 END TO END NEEDS FOR AUTONOMOUS VEHICLES NORM MARKS SEPT. 6, 2018 THE MOST EXCITING TIME IN TECH HISTORY GAMING $100B Industry ARTIFICIAL INTELLIGENCE $3T IT Industry AUTONOMOUS VEHICLES $10T Transportation
END TO END NEEDS FOR AUTONOMOUS VEHICLES NORM MARKS SEPT. 6, 2018 THE MOST EXCITING TIME IN TECH HISTORY GAMING $100B Industry ARTIFICIAL INTELLIGENCE $3T IT Industry AUTONOMOUS VEHICLES $10T Transportation
D.J.Kulkarni, Deputy Director, ARAI
 D.J.Kulkarni, Deputy Director, ARAI Why advanced ITS and Safety Systems? Building Ideal Vehicles Safer & More comfortable Why Advanced ITS & Safety Systems? contd. Insert Road Accident Deaths graph from
D.J.Kulkarni, Deputy Director, ARAI Why advanced ITS and Safety Systems? Building Ideal Vehicles Safer & More comfortable Why Advanced ITS & Safety Systems? contd. Insert Road Accident Deaths graph from
Test & Validation Challenges Facing ADAS and CAV
 Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
Devices to Assist Drivers to Comply with Speed Limits
 Vehicle Design and Research Pty Limited Australian Business No. 63 003 980 809 mpaineattpg.com.au Devices to Assist Drivers to Comply with Speed Limits Prepared by Michael Paine, Manager, Vehilce Design
Vehicle Design and Research Pty Limited Australian Business No. 63 003 980 809 mpaineattpg.com.au Devices to Assist Drivers to Comply with Speed Limits Prepared by Michael Paine, Manager, Vehilce Design
Traffic Operations with Connected and Automated Vehicles
 Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
REAL AND VIRTUAL PROVING OF AUTOMATED DRIVING IN BERLIN'S MIXED TRAFFIC. Dr. Ilja Radusch,
 REAL AND VIRTUAL PROVING OF AUTOMATED DRIVING IN BERLIN'S MIXED TRAFFIC Dr. Ilja Radusch, ilja.radusch@fokus.fraunhofer.de 10.05.2017 WHO AM I? Director Smart Mobility at Fraunhofer Fraunhofer is Europe
REAL AND VIRTUAL PROVING OF AUTOMATED DRIVING IN BERLIN'S MIXED TRAFFIC Dr. Ilja Radusch, ilja.radusch@fokus.fraunhofer.de 10.05.2017 WHO AM I? Director Smart Mobility at Fraunhofer Fraunhofer is Europe
ENGINEERING FOR HUMANS STPA ANALYSIS OF AN AUTOMATED PARKING SYSTEM
 ENGINEERING FOR HUMANS STPA ANALYSIS OF AN AUTOMATED PARKING SYSTEM Massachusetts Institute of Technology John Thomas Megan France General Motors Charles A. Green Mark A. Vernacchia Padma Sundaram Joseph
ENGINEERING FOR HUMANS STPA ANALYSIS OF AN AUTOMATED PARKING SYSTEM Massachusetts Institute of Technology John Thomas Megan France General Motors Charles A. Green Mark A. Vernacchia Padma Sundaram Joseph
LiDAR and the Autonomous Vehicle Revolution for Truck and Ride Sharing Fleets
 July 12, 2017 LiDAR and the Autonomous Vehicle Revolution for Truck and Ride Sharing Fleets Louay Eldada CEO and Co-founder, Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State
July 12, 2017 LiDAR and the Autonomous Vehicle Revolution for Truck and Ride Sharing Fleets Louay Eldada CEO and Co-founder, Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State
Applications of Machine Learning for Autonomous Driving & Challenges in Testing & Verifications. Ching-Yao Chan Nokia Workshop January 11, 2018
 Applications of Machine Learning for Autonomous Driving & Challenges in Testing & Verifications Ching-Yao Chan Nokia Workshop January 11, 2018 Taxonomy of A Driving Trip Driving Experience Taxonomy Classification
Applications of Machine Learning for Autonomous Driving & Challenges in Testing & Verifications Ching-Yao Chan Nokia Workshop January 11, 2018 Taxonomy of A Driving Trip Driving Experience Taxonomy Classification
Automated driving in urban environments: technical challenges, open problems and barriers. Fawzi Nashashibi
 Automated driving in urban environments: technical challenges, open problems and barriers Fawzi Nashashibi 6th Workshop on Planning, Perception and Navigation for Intelligent Vehicles SEPTEMBER 14, 2014
Automated driving in urban environments: technical challenges, open problems and barriers Fawzi Nashashibi 6th Workshop on Planning, Perception and Navigation for Intelligent Vehicles SEPTEMBER 14, 2014
Autonomous Mobile Robots and Intelligent Control Issues. Sven Seeland
 Autonomous Mobile Robots and Intelligent Control Issues Sven Seeland Overview Introduction Motivation History of Autonomous Cars DARPA Grand Challenge History and Rules Controlling Autonomous Cars MIT
Autonomous Mobile Robots and Intelligent Control Issues Sven Seeland Overview Introduction Motivation History of Autonomous Cars DARPA Grand Challenge History and Rules Controlling Autonomous Cars MIT
H2020 (ART ) CARTRE SCOUT
 CARTRE SCOUT") H2020 (ART-06-2016) CARTRE SCOUT Objective Advance deployment of connected and automated driving across Europe October 2016 September 2018 Coordination & Support Action 2 EU-funded Projects 36 consortium
H2020 (ART-06-2016) CARTRE SCOUT Objective Advance deployment of connected and automated driving across Europe October 2016 September 2018 Coordination & Support Action 2 EU-funded Projects 36 consortium
MEMS Sensors for automotive safety. Marc OSAJDA, NXP Semiconductors
 MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
Copyright 2016 by Innoviz All rights reserved. Innoviz
 Innoviz 0 Cutting Edge 3D Sensing to Enable Fully Autonomous Vehicles May 2017 Innoviz 1 Autonomous Vehicles Industry Overview Innoviz 2 Autonomous Vehicles From Vision to Reality Uber Google Ford GM 3
Innoviz 0 Cutting Edge 3D Sensing to Enable Fully Autonomous Vehicles May 2017 Innoviz 1 Autonomous Vehicles Industry Overview Innoviz 2 Autonomous Vehicles From Vision to Reality Uber Google Ford GM 3
Automated driving on highways
 Jens Langenberg Volkswagen Group Research Automated driving on highways Final Event Aachen, Germany 28 June 2017 Partners The main objective is the development and demonstration of automated and cooperative
Jens Langenberg Volkswagen Group Research Automated driving on highways Final Event Aachen, Germany 28 June 2017 Partners The main objective is the development and demonstration of automated and cooperative
ADVANCES IN INTELLIGENT VEHICLES
 ADVANCES IN INTELLIGENT VEHICLES MIKE BROWN SWRI 1 OVERVIEW Intelligent Vehicle Research Platform MARTI Intelligent Vehicle Technologies Cooperative Vehicles / Infrastructure Recent Demonstrations Conclusions
ADVANCES IN INTELLIGENT VEHICLES MIKE BROWN SWRI 1 OVERVIEW Intelligent Vehicle Research Platform MARTI Intelligent Vehicle Technologies Cooperative Vehicles / Infrastructure Recent Demonstrations Conclusions
WHITE PAPER Autonomous Driving A Bird s Eye View
 WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
Safe, superior and comfortable driving - Market needs and solutions
 3 rd Conference Active Safety through Driver Assistance Safe, superior and comfortable driving - Market needs and solutions Dr. Werner Struth - President, 1 Global trends Legislation Safety legislation
3 rd Conference Active Safety through Driver Assistance Safe, superior and comfortable driving - Market needs and solutions Dr. Werner Struth - President, 1 Global trends Legislation Safety legislation
EMERGING TECHNOLOGIES, EMERGING ISSUES
 EMERGING TECHNOLOGIES, EMERGING ISSUES Peter Burns Ergonomics and Crash Avoidance Road Safety and Motor Vehicle Regulation Directorate 1 Outline Distraction countermeasures Evolving trends Emerging countermeasures
EMERGING TECHNOLOGIES, EMERGING ISSUES Peter Burns Ergonomics and Crash Avoidance Road Safety and Motor Vehicle Regulation Directorate 1 Outline Distraction countermeasures Evolving trends Emerging countermeasures
AND CHANGES IN URBAN MOBILITY PATTERNS
 TECHNOLOGY-ENABLED MOBILITY: Virtual TEsting of Autonomous Vehicles AND CHANGES IN URBAN MOBILITY PATTERNS Technology-Enabled Mobility In the era of the digital revolution everything is inter-connected.
TECHNOLOGY-ENABLED MOBILITY: Virtual TEsting of Autonomous Vehicles AND CHANGES IN URBAN MOBILITY PATTERNS Technology-Enabled Mobility In the era of the digital revolution everything is inter-connected.
The Digital Future of Driving Dr. László Palkovics State Secretary for Education
 The Digital Future of Driving Dr. László Palkovics State Secretary for Education 1. WHAT IS THE CHALLENGE? What is the challenge? Mobility Challenges Inspirating factors for development 1 Zero Emission
The Digital Future of Driving Dr. László Palkovics State Secretary for Education 1. WHAT IS THE CHALLENGE? What is the challenge? Mobility Challenges Inspirating factors for development 1 Zero Emission
Functional Algorithm for Automated Pedestrian Collision Avoidance System
 Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Jimi van der Woning. 30 November 2010
 Jimi van der Woning 30 November 2010 The importance of robotic cars DARPA Hardware Software Path planning Google Car Where are we now? Future 30-11-2010 Jimi van der Woning 2/17 Currently over 800 million
Jimi van der Woning 30 November 2010 The importance of robotic cars DARPA Hardware Software Path planning Google Car Where are we now? Future 30-11-2010 Jimi van der Woning 2/17 Currently over 800 million
Activity-Travel Behavior Impacts of Driverless Cars
 January 12-16, 2014; Washington, D.C. 93 rd Annual Meeting of the Transportation Research Board Activity-Travel Behavior Impacts of Driverless Cars Ram M. Pendyala 1 and Chandra R. Bhat 2 1 School of Sustainable
January 12-16, 2014; Washington, D.C. 93 rd Annual Meeting of the Transportation Research Board Activity-Travel Behavior Impacts of Driverless Cars Ram M. Pendyala 1 and Chandra R. Bhat 2 1 School of Sustainable
ROAD SAFETY RESEARCH, POLICING AND EDUCATION CONFERENCE, NOV 2001
 ROAD SAFETY RESEARCH, POLICING AND EDUCATION CONFERENCE, NOV 2001 Title Young pedestrians and reversing motor vehicles Names of authors Paine M.P. and Henderson M. Name of sponsoring organisation Motor
ROAD SAFETY RESEARCH, POLICING AND EDUCATION CONFERENCE, NOV 2001 Title Young pedestrians and reversing motor vehicles Names of authors Paine M.P. and Henderson M. Name of sponsoring organisation Motor
Connected vehicles on European roads: benefits for safety and traffic management
 Connected vehicles on European roads: benefits for safety and traffic management Luciano Altomare Centro Ricerche Fiat Workshop Klimamobility 2017 April, 20 th 2017 Index V2X evolution in Europe: regulatory
Connected vehicles on European roads: benefits for safety and traffic management Luciano Altomare Centro Ricerche Fiat Workshop Klimamobility 2017 April, 20 th 2017 Index V2X evolution in Europe: regulatory
STPA in Automotive Domain Advanced Tutorial
 www.uni-stuttgart.de The Second European STAMP Workshop 2014 STPA in Automotive Domain Advanced Tutorial Asim Abdulkhaleq, Ph.D Student Institute of Software Technology University of Stuttgart, Germany
www.uni-stuttgart.de The Second European STAMP Workshop 2014 STPA in Automotive Domain Advanced Tutorial Asim Abdulkhaleq, Ph.D Student Institute of Software Technology University of Stuttgart, Germany
Andrey Berdichevskiy, World Economic Forum. Future of Urban and Autonomous Mobility: Bringing Autonomy On and Beyond the Streets of Boston
 Andrey Berdichevskiy, World Economic Forum Future of Urban and Autonomous Mobility: Bringing Autonomy On and Beyond the Streets of Boston Why does the World Economic Forum care about self-driving vehicles?
Andrey Berdichevskiy, World Economic Forum Future of Urban and Autonomous Mobility: Bringing Autonomy On and Beyond the Streets of Boston Why does the World Economic Forum care about self-driving vehicles?
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
ACTIVE SAFETY 3.0. Prof. Kompaß, VP Fahrzeugsicherheit, 14. April 2016
 ACTIVE SAFETY 3.0 Prof. Kompaß, VP Fahrzeugsicherheit, 14. April 2016 THE NEW BMW 7 SERIES DRIVER ASSISTANCE PROVIDES COMFORT AND SAFETY AT THE HIGHEST LEVEL. Crossing traffic warning rear / front Lane
ACTIVE SAFETY 3.0 Prof. Kompaß, VP Fahrzeugsicherheit, 14. April 2016 THE NEW BMW 7 SERIES DRIVER ASSISTANCE PROVIDES COMFORT AND SAFETY AT THE HIGHEST LEVEL. Crossing traffic warning rear / front Lane
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY
 UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
AKTIV experiencing the future together. Dr. Ulrich Kreßel Daimler AG, Research Center Ulm Walter Schwertberger MAN Nutzfahrzeuge, München
 AKTIV experiencing the future together Dr. Ulrich Kreßel Daimler AG, Research Center Ulm Walter Schwertberger MAN Nutzfahrzeuge, München Traffic Vehicle Communication German research initiative AKTIV:
AKTIV experiencing the future together Dr. Ulrich Kreßel Daimler AG, Research Center Ulm Walter Schwertberger MAN Nutzfahrzeuge, München Traffic Vehicle Communication German research initiative AKTIV:
LiDAR Teach-In OSRAM Licht AG June 20, 2018 Munich Light is OSRAM
 www.osram.com LiDAR Teach-In June 20, 2018 Munich Light is OSRAM Agenda Introduction Autonomous driving LIDAR technology deep-dive LiDAR@OS: Emitter technologies Outlook LiDAR Tech Teach-In June 20, 2018
www.osram.com LiDAR Teach-In June 20, 2018 Munich Light is OSRAM Agenda Introduction Autonomous driving LIDAR technology deep-dive LiDAR@OS: Emitter technologies Outlook LiDAR Tech Teach-In June 20, 2018
The final test of a person's defensive driving ability is whether or not he or she can avoid hazardous situations and prevent accident..
 It is important that all drivers know the rules of the road, as contained in California Driver Handbook and the Vehicle Code. However, knowing the rules does not necessarily make one a safe driver. Safe
It is important that all drivers know the rules of the road, as contained in California Driver Handbook and the Vehicle Code. However, knowing the rules does not necessarily make one a safe driver. Safe
Study of the Performance of a Driver-vehicle System for Changing the Steering Characteristics of a Vehicle
 20 Special Issue Estimation and Control of Vehicle Dynamics for Active Safety Research Report Study of the Performance of a Driver-vehicle System for Changing the Steering Characteristics of a Vehicle
20 Special Issue Estimation and Control of Vehicle Dynamics for Active Safety Research Report Study of the Performance of a Driver-vehicle System for Changing the Steering Characteristics of a Vehicle