CSE 352: Self-Driving Cars. Team 2: Randall Huang Youri Paul Raman Sinha Joseph Cullen
|
|
|
- Theresa Ramsey
- 6 years ago
- Views:
Transcription
1 CSE 352: Self-Driving Cars Team 2: Randall Huang Youri Paul Raman Sinha Joseph Cullen

2 What are Self-Driving Cars A self-driving car, also called autonomous car and driverless car, is a vehicle that is capable of sensing its environment and navigating without human input.
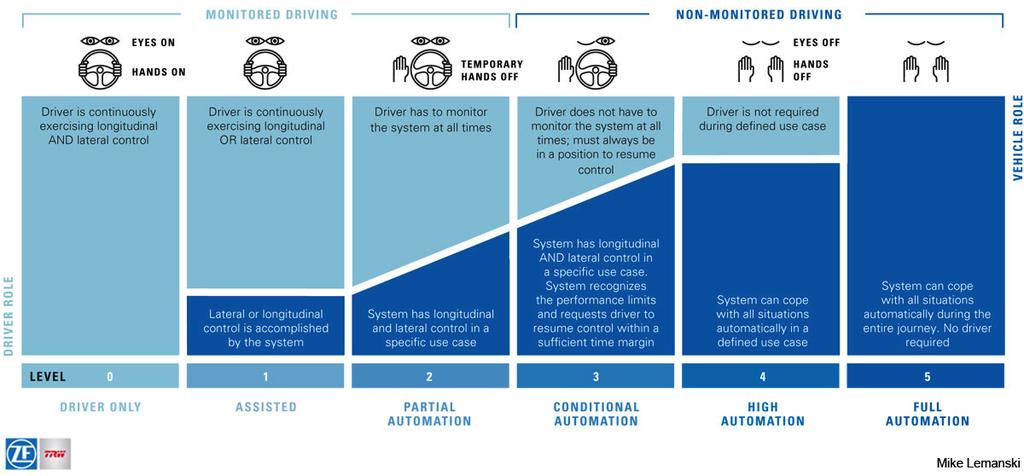
3 Classification
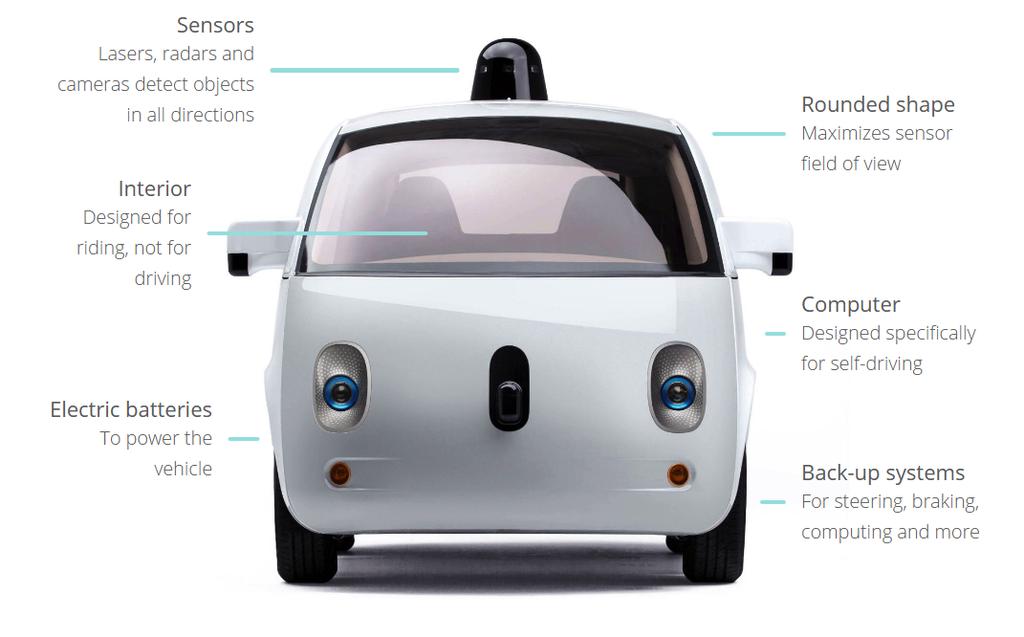
4 Self-Driving Car Layout



5 Early Automatization Subject of fascination for millennia. In 1478, Leonardo Da Vinci sketched the mechanism of a cart that would go through a predetermined path. Evidence of concrete experiments can be traced back to at least the 1920s (i.e. Linriccan Wonder).
6 Early Automatization Cont. Further research and progress ensued in the following decades. In 1987, the first truly self-driving car was developed. Built at Bundeswehr University Munich (Universität der Bundeswehr München) Used Saccadic Vision, Probabilistic approaches and parallel computers.
7 Algorithm GPS information enables the vehicle to locate itself. Additional data obtained from the sensors is used to refine the car s location and develop a 3D image of the its environment. The data is then fed to the car s control system, which determines the next move. This process is repeated constantly in a loop many times per second till the car reaches its final destination.

8 Control System Most Control Systems implement a deliberative architecture to make decisions.
9 Deliberate Architecture How It Works? 1. Maintains an internal map of the car s environment. 2. Uses that map to decide what is the best path to their destination among possible paths. 3. Breaks the decision into multiple commands. 4. Sends the commands to the car s actuators which controls the car s steering, braking, etc.


10 Computer Vision Edge detection Feature recognition


11 Computer Vision Lane detecting Driving near human controlled vehicles add complications


12 Computer Vision Noise Reduction - Sensors can be calibrated automatically to greatly minimize noise Some information is unimportant and should be ignored

13 Neural Networks Convolutional neural networks Directly map camera data to steering wheel Human training data

14 Navigation Altered A* Search Algorithm
15 Articles / Problems With Cars Unpredictable Humans Line detection Detours and rerouted roads Dark outlines Decision making

16 Tesla Semi-autonomous Car Incident
17 Tesla Semi-autonomous Car Incident Driver and crash avoidance system unable to detect an obstacle due to a brightly lit sky Tesla stated that its crash avoidance system only worked when both its radar and computer vision agreed there was an obstacle Vehicle was not intended to be hands-free Causing doubt among public
18 Google s Self Driving Car Crash occurred due to reckless driving from a human driver running a red light Its detection system anticipated the oncoming car to run the light Applied brakes Test driver took over, and car collided with other driver Consider this: Human Judgment or Computer Automated Control Can we trust computer systems to make split second decisions? Should self driving cars be on the same road with humans?
19 Works Cited
20 Works Cited landed-its-test-driver-in-the-hospital/
21 Works Cited /05/4.0_da_Vincilores.jpg
22 Works Cited Source: Gehrig, Stefan K.; Stein, Fridtjof J. (1999). Dead reckoning and cartography using stereo vision for an autonomous car. IEEE/RSJ International Conference on Intelligent Robots and Systems. 3. Kyongju. pp doi: / IROS ISBN
Deep Learning Will Make Truly Self-Driving Cars a Reality
 Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
CSE 352: Self-Driving Cars. Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark
 CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
A Presentation on. Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing
 in autonomous vehicles for alerting driver during overtaking and lane changing") A Presentation on Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing Presented By: Abhishek Shriram Umachigi Department of Electrical Engineering
A Presentation on Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing Presented By: Abhishek Shriram Umachigi Department of Electrical Engineering
AUTONOMOUS CARS: TECHNIQUES AND CHALLENGES
 youtube.com/watch?v=ollfk8osnem AUTONOMOUS CARS: TECHNIQUES AND CHALLENGES Slides: https://dhgo.to/coe-cars Prof. Dr. Dominik Herrmann // University of Bamberg (Germany) Often inappropriately used. How
youtube.com/watch?v=ollfk8osnem AUTONOMOUS CARS: TECHNIQUES AND CHALLENGES Slides: https://dhgo.to/coe-cars Prof. Dr. Dominik Herrmann // University of Bamberg (Germany) Often inappropriately used. How
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS
 EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
Advances in Sensor Technology which Enables Autonomous Vehicles
 Advances in Sensor Technology which Enables Autonomous Vehicles Joseph E. Jesson - - CTO Assurenet, http://assurenet.us/ - - CTO Able Device, http://abledevice.com/ - - CEO RFSigint - - Visiting & Adjunct
Advances in Sensor Technology which Enables Autonomous Vehicles Joseph E. Jesson - - CTO Assurenet, http://assurenet.us/ - - CTO Able Device, http://abledevice.com/ - - CEO RFSigint - - Visiting & Adjunct
Le développement technique des véhicules autonomes
 Shaping the future Le développement technique des véhicules autonomes Renaud Dubé, Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Fribourg, 23 Juin 2016 Renaud Dubé 23.06.2016 1 Content
Shaping the future Le développement technique des véhicules autonomes Renaud Dubé, Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Fribourg, 23 Juin 2016 Renaud Dubé 23.06.2016 1 Content
Vehicles at Volkswagen
 Autonomous Driving and Intelligent Vehicles at Volkswagen Dirk Langer, Ph.D. VW Autonomous Driving Story 2000 2003 2006 Robot Klaus Purpose: Replace test drivers on poor test tracks (job safety) Robot
Autonomous Driving and Intelligent Vehicles at Volkswagen Dirk Langer, Ph.D. VW Autonomous Driving Story 2000 2003 2006 Robot Klaus Purpose: Replace test drivers on poor test tracks (job safety) Robot
ACCELERATING THE RACE TO SELF-DRIVING CARS. Jen-Hsun Huang, Co-Founder & CEO, NVIDIA Jan. 4, 2016
 ACCELERATING THE RACE TO SELF-DRIVING CARS Jen-Hsun Huang, Co-Founder & CEO, NVIDIA Jan. 4, 2016 SELF-DRIVING IS A MAJOR COMPUTER SCIENCE CHALLENGE SOFTWARE SUPERCOMPUTER DEEP LEARNING 2 NVIDIA DRIVE PX
ACCELERATING THE RACE TO SELF-DRIVING CARS Jen-Hsun Huang, Co-Founder & CEO, NVIDIA Jan. 4, 2016 SELF-DRIVING IS A MAJOR COMPUTER SCIENCE CHALLENGE SOFTWARE SUPERCOMPUTER DEEP LEARNING 2 NVIDIA DRIVE PX
Applications of Machine Learning for Autonomous Driving & Challenges in Testing & Verifications. Ching-Yao Chan Nokia Workshop January 11, 2018
 Applications of Machine Learning for Autonomous Driving & Challenges in Testing & Verifications Ching-Yao Chan Nokia Workshop January 11, 2018 Taxonomy of A Driving Trip Driving Experience Taxonomy Classification
Applications of Machine Learning for Autonomous Driving & Challenges in Testing & Verifications Ching-Yao Chan Nokia Workshop January 11, 2018 Taxonomy of A Driving Trip Driving Experience Taxonomy Classification
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
Cooperative Autonomous Driving and Interaction with Vulnerable Road Users
 9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
Functional Algorithm for Automated Pedestrian Collision Avoidance System
 Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Autopilot. From an owner s perspective
 Tesla Autopilot From an owner s perspective My Credentials I responded to a Facebook post looking for a Tesla owner with Autopilot I own a Tesla with Autopilot 2.0 I drive 66 miles, commuting from Madison
Tesla Autopilot From an owner s perspective My Credentials I responded to a Facebook post looking for a Tesla owner with Autopilot I own a Tesla with Autopilot 2.0 I drive 66 miles, commuting from Madison
Self-Driving Vehicles in the Park
 Self-Driving Vehicles in the Park Bryant Walker Smith Center for Internet and Society Center for Automotive Research cyberlaw.stanford.edu/about/people/bryant-walker-smith 1 A robot by any other name Self-driving
Self-Driving Vehicles in the Park Bryant Walker Smith Center for Internet and Society Center for Automotive Research cyberlaw.stanford.edu/about/people/bryant-walker-smith 1 A robot by any other name Self-driving
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF
 AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
Computer science Case study: your (autonomous) taxi awaits you
 taxi awaits you") M&N18/4/COMSC/HP3/ENG/TZ0/XX/CS Computer science Case study: your (autonomous) taxi awaits you For use in May 2018 and November 2018 Instructions to candidates y Case study booklet required for higher
M&N18/4/COMSC/HP3/ENG/TZ0/XX/CS Computer science Case study: your (autonomous) taxi awaits you For use in May 2018 and November 2018 Instructions to candidates y Case study booklet required for higher
REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE. Alex Haag Munich,
 REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE Alex Haag Munich, 10.10.2017 10/9/17 Regulatory Approval of an AI-based Autonomous Vehicle 2 1 INTRO Autonomous Intelligent Driving, GmbH Launched
REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE Alex Haag Munich, 10.10.2017 10/9/17 Regulatory Approval of an AI-based Autonomous Vehicle 2 1 INTRO Autonomous Intelligent Driving, GmbH Launched
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS
 MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
The Role of Intelligent Transport Systems in Road Safety and Logistics
 The Role of Intelligent Transport Systems in Road Safety and Logistics Mike van Tonder Aurecon and President ITS SA PRESENTATION CONTENT 1. What are Intelligent Transport Systems (ITS)? 2. What Types of
The Role of Intelligent Transport Systems in Road Safety and Logistics Mike van Tonder Aurecon and President ITS SA PRESENTATION CONTENT 1. What are Intelligent Transport Systems (ITS)? 2. What Types of
Citi's 2016 Car of the Future Symposium
 Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
Self-Driving RC-Car. Doke Akshay M 1, Shinde Vishal R 2, Kumbhar Mangesh R 3 Rai Nishant 4, Prof S. B. Bhosale 5
 Self-Driving RC-Car Doke Akshay M 1, Shinde Vishal R 2, Kumbhar Mangesh R 3 Rai Nishant 4, Prof S. B. Bhosale 5 1,2,3 UG Scholar, Dept. of Computer Engineering, JCOE, Pune (India) 4Assist. Professor Dept.
Self-Driving RC-Car Doke Akshay M 1, Shinde Vishal R 2, Kumbhar Mangesh R 3 Rai Nishant 4, Prof S. B. Bhosale 5 1,2,3 UG Scholar, Dept. of Computer Engineering, JCOE, Pune (India) 4Assist. Professor Dept.
The Imperative to Deploy. Automated Driving. CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper
 Stepper") The Imperative to Deploy 1 Automated Driving CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper 2 Paths to the Car of the Future costs roaming e-bike driving enjoyment hybrid electric
The Imperative to Deploy 1 Automated Driving CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper 2 Paths to the Car of the Future costs roaming e-bike driving enjoyment hybrid electric
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
David Pickett [Volvo Car Australia]; [National Road Safety Forum 2
![David Pickett [Volvo Car Australia]; [National Road Safety Forum 2](/thumbs/89/98792326.jpg "David Pickett [Volvo Car Australia]; [National Road Safety Forum 2") 1 David Pickett [Volvo Car Australia]; [National Road Safety Forum 2 Volvo V40 Integrated Safety and Driver Support SYSTEMS CV-sensor (standard) City Safety Pre-prepared restraints Front radar + camera:
1 David Pickett [Volvo Car Australia]; [National Road Safety Forum 2 Volvo V40 Integrated Safety and Driver Support SYSTEMS CV-sensor (standard) City Safety Pre-prepared restraints Front radar + camera:
Activity-Travel Behavior Impacts of Driverless Cars
 January 12-16, 2014; Washington, D.C. 93 rd Annual Meeting of the Transportation Research Board Activity-Travel Behavior Impacts of Driverless Cars Ram M. Pendyala 1 and Chandra R. Bhat 2 1 School of Sustainable
January 12-16, 2014; Washington, D.C. 93 rd Annual Meeting of the Transportation Research Board Activity-Travel Behavior Impacts of Driverless Cars Ram M. Pendyala 1 and Chandra R. Bhat 2 1 School of Sustainable
Unmanned Surface Vessels - Opportunities and Technology
 Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Investigation on Control Methods and Development of Intelligent Vehicle Controller for Automated Highway Systems
 Investigation on Control Methods and Development of Intelligent Vehicle Controller for Automated Highway Systems P.Suresh ME11D045 Guide Dr. P. V. Manivannan Precision Engineering and Instrumentation Laboratory
Investigation on Control Methods and Development of Intelligent Vehicle Controller for Automated Highway Systems P.Suresh ME11D045 Guide Dr. P. V. Manivannan Precision Engineering and Instrumentation Laboratory
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE. CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development
 AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
SYSTEM CONFIGURATION OF INTELLIGENT PARKING ASSISTANT SYSTEM
 SYSTEM CONFIGURATION OF INTELLIGENT PARKING ASSISTANT SYSTEM Ho Gi Jung *, Chi Gun Choi, Dong Suk Kim, Pal Joo Yoon MANDO Corporation ZIP 446-901, 413-5, Gomae-Dong, Giheung-Gu, Yongin-Si, Kyonggi-Do,
SYSTEM CONFIGURATION OF INTELLIGENT PARKING ASSISTANT SYSTEM Ho Gi Jung *, Chi Gun Choi, Dong Suk Kim, Pal Joo Yoon MANDO Corporation ZIP 446-901, 413-5, Gomae-Dong, Giheung-Gu, Yongin-Si, Kyonggi-Do,
On the role of AI in autonomous driving: prospects and challenges
 On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
BlueBox: Complete Autonomous Vehicle Platform Using NXP Silicon at Each ADAS Node EXTERNAL USE
 BlueBox: Complete Autonomous Vehicle Platform Using NXP Silicon at Each ADAS Node Safe & Secure Mobility 90% Innovation Through Electronics Seamlessly Connected Mobility Experience ADAS Towards Self-Driving
BlueBox: Complete Autonomous Vehicle Platform Using NXP Silicon at Each ADAS Node Safe & Secure Mobility 90% Innovation Through Electronics Seamlessly Connected Mobility Experience ADAS Towards Self-Driving
Automotive Electronics/Connectivity/IoT/Smart City Track
 Automotive Electronics/Connectivity/IoT/Smart City Track The Automobile Electronics Sessions explore and investigate the ever-growing world of automobile electronics that affect virtually every aspect
Automotive Electronics/Connectivity/IoT/Smart City Track The Automobile Electronics Sessions explore and investigate the ever-growing world of automobile electronics that affect virtually every aspect
D.J.Kulkarni, Deputy Director, ARAI
 D.J.Kulkarni, Deputy Director, ARAI Why advanced ITS and Safety Systems? Building Ideal Vehicles Safer & More comfortable Why Advanced ITS & Safety Systems? contd. Insert Road Accident Deaths graph from
D.J.Kulkarni, Deputy Director, ARAI Why advanced ITS and Safety Systems? Building Ideal Vehicles Safer & More comfortable Why Advanced ITS & Safety Systems? contd. Insert Road Accident Deaths graph from
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
2016 IGVC Design Report Submitted: May 13, 2016
 2016 IGVC Design Report Submitted: May 13, 2016 I certify that the design and engineering of the vehicle by the current student team has been significant and equivalent to what might be awarded credit
2016 IGVC Design Report Submitted: May 13, 2016 I certify that the design and engineering of the vehicle by the current student team has been significant and equivalent to what might be awarded credit
THE FUTURE OF AUTONOMOUS CARS
 Index Table of Contents Table of Contents... i List of Figures... ix Executive summary... 1 1 Introduction to autonomous cars... 3 1.1 Definitions and classifications... 3 1.2 Brief history of autonomous
Index Table of Contents Table of Contents... i List of Figures... ix Executive summary... 1 1 Introduction to autonomous cars... 3 1.1 Definitions and classifications... 3 1.2 Brief history of autonomous
Future Mobility & Machine Learning
 Future Mobility & Machine Learning Self-Driving Cars Intelligent Traffic Control Kim G Larsen Jakob H Taankvist, Marco Muniz, Andreas B Eriksen, Mikkel Færgeman, Marius Mikucions,.. DiCyPS Vision Day 2017
Future Mobility & Machine Learning Self-Driving Cars Intelligent Traffic Control Kim G Larsen Jakob H Taankvist, Marco Muniz, Andreas B Eriksen, Mikkel Færgeman, Marius Mikucions,.. DiCyPS Vision Day 2017
Uber autonomous vehicle death raises questions for UK law review
 Uber autonomous vehicle death raises questions for UK law review Alex Scroxton Networking Editor 22 Mar 2018 9:30 Uber suspended testing of autonomous vehicles in North America after one of its cars struck
Uber autonomous vehicle death raises questions for UK law review Alex Scroxton Networking Editor 22 Mar 2018 9:30 Uber suspended testing of autonomous vehicles in North America after one of its cars struck
How to build an autonomous anything
 How to build an autonomous anything Michelle Hirsch Head of MATLAB Product Management MathWorks 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomous Having the power for self-governance
How to build an autonomous anything Michelle Hirsch Head of MATLAB Product Management MathWorks 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomous Having the power for self-governance
UNIVERSITÉ DE MONCTON FACULTÉ D INGÉNIERIE. Moncton, NB, Canada PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY
 FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
Optical Products in Automotive Active Safety
 Optical Products in Automotive Active Safety Per Knutsson, Autoliv Electronics AB 2014-11-12 Driven for Life Outline Introduction Active Safety Sensors in Active Safety Current Vision Systems Future Vision
Optical Products in Automotive Active Safety Per Knutsson, Autoliv Electronics AB 2014-11-12 Driven for Life Outline Introduction Active Safety Sensors in Active Safety Current Vision Systems Future Vision
Jimi van der Woning. 30 November 2010
 Jimi van der Woning 30 November 2010 The importance of robotic cars DARPA Hardware Software Path planning Google Car Where are we now? Future 30-11-2010 Jimi van der Woning 2/17 Currently over 800 million
Jimi van der Woning 30 November 2010 The importance of robotic cars DARPA Hardware Software Path planning Google Car Where are we now? Future 30-11-2010 Jimi van der Woning 2/17 Currently over 800 million
THE AUTONOMOUS AIRPORT
 THE AUTONOMOUS AIRPORT OF THE PRESENT Ken Dunlap Managing Partner ACI-NA Public Safety and Security Conference New Orleans 2018 OUR DISCUSSION WHAT IS AUTONOMY? STATE OF THE ART AUTONOMY AND THE AIRPORT
THE AUTONOMOUS AIRPORT OF THE PRESENT Ken Dunlap Managing Partner ACI-NA Public Safety and Security Conference New Orleans 2018 OUR DISCUSSION WHAT IS AUTONOMY? STATE OF THE ART AUTONOMY AND THE AIRPORT
Driver assistance systems and outlook into automated driving
 Driver assistance systems and outlook into automated driving EAEC-ESFA2015 Bucharest November 2015 1 General presentation of the Bosch Group Some 45,600 1 researchers and developers work at Bosch: at 94
Driver assistance systems and outlook into automated driving EAEC-ESFA2015 Bucharest November 2015 1 General presentation of the Bosch Group Some 45,600 1 researchers and developers work at Bosch: at 94
Formal Methods will not Prevent Self-Driving Cars from Having Accidents
 Formal Methods will not Prevent Self-Driving Cars from Having Accidents Thierry Fraichard INRIA, LIG-CNRS and Grenoble University Forum Méthodes Formelles Mardi 10 octobre 2017 From Mobile Robots to Self-Driving
Formal Methods will not Prevent Self-Driving Cars from Having Accidents Thierry Fraichard INRIA, LIG-CNRS and Grenoble University Forum Méthodes Formelles Mardi 10 octobre 2017 From Mobile Robots to Self-Driving
University of Michigan s Work Toward Autonomous Cars
 University of Michigan s Work Toward Autonomous Cars RYAN EUSTICE NAVAL ARCHITECTURE & MARINE ENGINEERING MECHANICAL ENGINEERING, AND COMPUTER SCIENCE AND ENGINEERING Roadmap Why automated driving? Next
University of Michigan s Work Toward Autonomous Cars RYAN EUSTICE NAVAL ARCHITECTURE & MARINE ENGINEERING MECHANICAL ENGINEERING, AND COMPUTER SCIENCE AND ENGINEERING Roadmap Why automated driving? Next
BASIC MECHATRONICS ENGINEERING
 MBEYA UNIVERSITY OF SCIENCE AND TECHNOLOGY Lecture Summary on BASIC MECHATRONICS ENGINEERING NTA - 4 Mechatronics Engineering 2016 Page 1 INTRODUCTION TO MECHATRONICS Mechatronics is the field of study
MBEYA UNIVERSITY OF SCIENCE AND TECHNOLOGY Lecture Summary on BASIC MECHATRONICS ENGINEERING NTA - 4 Mechatronics Engineering 2016 Page 1 INTRODUCTION TO MECHATRONICS Mechatronics is the field of study
ZF Advances Key Technologies for Automated Driving
 Page 1/5, January 9, 2017 ZF Advances Key Technologies for Automated Driving ZF s See Think Act supports self-driving cars and trucks ZF and NVIDIA provide computing power to bring artificial intelligence
Page 1/5, January 9, 2017 ZF Advances Key Technologies for Automated Driving ZF s See Think Act supports self-driving cars and trucks ZF and NVIDIA provide computing power to bring artificial intelligence
The Evolution of Transportation Technology in an Increasingly Smart Society. Presented by: Matthew J. Schiemer, PE September 12, 2017
 The Evolution of Transportation Technology in an Increasingly Smart Society Presented by: Matthew J. Schiemer, PE September 12, 2017 Traffic Signal Systems 1914 to Present First electric traffic signal
The Evolution of Transportation Technology in an Increasingly Smart Society Presented by: Matthew J. Schiemer, PE September 12, 2017 Traffic Signal Systems 1914 to Present First electric traffic signal
Electronic Systems Research at CU-ICAR
 Electronic Systems Research at CU-ICAR Todd H. Hubing Michelin Professor of Vehicular Electronics Clemson University Automobiles are Complex Electronic Systems Navigation System Fuel Injection Engine Ignition
Electronic Systems Research at CU-ICAR Todd H. Hubing Michelin Professor of Vehicular Electronics Clemson University Automobiles are Complex Electronic Systems Navigation System Fuel Injection Engine Ignition
Cybercars : Past, Present and Future of the Technology
 Cybercars : Past, Present and Future of the Technology Michel Parent*, Arnaud de La Fortelle INRIA Project IMARA Domaine de Voluceau, Rocquencourt BP 105, 78153 Le Chesnay Cedex, France Michel.parent@inria.fr
Cybercars : Past, Present and Future of the Technology Michel Parent*, Arnaud de La Fortelle INRIA Project IMARA Domaine de Voluceau, Rocquencourt BP 105, 78153 Le Chesnay Cedex, France Michel.parent@inria.fr
GCAT. University of Michigan-Dearborn
 GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
Outline WHY ARE SELF DRIVING VEHICLES GETTING INVOLVED IN CRASHES?
 WHY ARE SELF DRIVING VEHICLES GETTING INVOLVED IN CRASHES? WHAT CAN WE DO TO REDUCE CONFLICTS WITH OTHER ROAD USERS? Gunnar Deinboll Jenssen, SINTEF Safety and Mobility Sarepta Conference, Trondheim August
WHY ARE SELF DRIVING VEHICLES GETTING INVOLVED IN CRASHES? WHAT CAN WE DO TO REDUCE CONFLICTS WITH OTHER ROAD USERS? Gunnar Deinboll Jenssen, SINTEF Safety and Mobility Sarepta Conference, Trondheim August
Detailed Design Review
 Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
SELF DRIVING VEHICLE WITH CONTROL SYSTEM USING STEREOVISION TECHNIQUE
 SELF DRIVING VEHICLE WITH CONTROL SYSTEM USING STEREOVISION TECHNIQUE Kekan S M*, Dr. Mittal S K Department of Electrical Engineering, G.H. Raisoni Institute of Engineering and Technology, Wagholi, Pune-412207,
SELF DRIVING VEHICLE WITH CONTROL SYSTEM USING STEREOVISION TECHNIQUE Kekan S M*, Dr. Mittal S K Department of Electrical Engineering, G.H. Raisoni Institute of Engineering and Technology, Wagholi, Pune-412207,
Enhancement of Automobile Safety using Machine Learning
 Enhancement of Automobile Safety using Machine Learning Prof. Govindaraj M 1, Nischal S 2 1,2 Department of MCA, New Horizon College of Engineering Abstract The Goal of Machine Learning is to improve the
Enhancement of Automobile Safety using Machine Learning Prof. Govindaraj M 1, Nischal S 2 1,2 Department of MCA, New Horizon College of Engineering Abstract The Goal of Machine Learning is to improve the
PAVIA FERRARA TORINO PARMA ANCONA FIRENZE ROMA
 1 The ARGO Autonomous Vehicle Massimo Bertozzi 1, Alberto Broggi 2, and Alessandra Fascioli 1 1 Dipartimento di Ingegneria dell'informazione Universita di Parma, I-43100 PARMA, Italy 2 Dipartimento di
1 The ARGO Autonomous Vehicle Massimo Bertozzi 1, Alberto Broggi 2, and Alessandra Fascioli 1 1 Dipartimento di Ingegneria dell'informazione Universita di Parma, I-43100 PARMA, Italy 2 Dipartimento di
How to build an autonomous anything
 How to build an autonomous anything Michelle Hirsch Head of MATLAB Product Management MathWorks 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomous Having the power for self-governance
How to build an autonomous anything Michelle Hirsch Head of MATLAB Product Management MathWorks 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomous Having the power for self-governance
Festival Nacional de Robótica - Portuguese Robotics Open. Rules for Autonomous Driving. Sociedade Portuguesa de Robótica
 Festival Nacional de Robótica - Portuguese Robotics Open Rules for Autonomous Driving Sociedade Portuguesa de Robótica 2017 Contents 1 Introduction 1 2 Rules for Robot 2 2.1 Dimensions....................................
Festival Nacional de Robótica - Portuguese Robotics Open Rules for Autonomous Driving Sociedade Portuguesa de Robótica 2017 Contents 1 Introduction 1 2 Rules for Robot 2 2.1 Dimensions....................................
THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA.
 GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
Department of Electrical and Computer Science
 Department of Electrical and Computer Science Howard University Washington, DC 20059 EECE 401 & 402 Senior Design Final Report By Team AutoMoe Tavares Kidd @ 02744064 Lateef Adetona @02732398 Jordan Lafontant
Department of Electrical and Computer Science Howard University Washington, DC 20059 EECE 401 & 402 Senior Design Final Report By Team AutoMoe Tavares Kidd @ 02744064 Lateef Adetona @02732398 Jordan Lafontant
STPA in Automotive Domain Advanced Tutorial
 www.uni-stuttgart.de The Second European STAMP Workshop 2014 STPA in Automotive Domain Advanced Tutorial Asim Abdulkhaleq, Ph.D Student Institute of Software Technology University of Stuttgart, Germany
www.uni-stuttgart.de The Second European STAMP Workshop 2014 STPA in Automotive Domain Advanced Tutorial Asim Abdulkhaleq, Ph.D Student Institute of Software Technology University of Stuttgart, Germany
MEMS Sensors for automotive safety. Marc OSAJDA, NXP Semiconductors
 MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
Leveraging AI for Self-Driving Cars at GM. Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel
 Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
PSA Peugeot Citroën Driving Automation and Connectivity
 PSA Peugeot Citroën Driving Automation and Connectivity June 2015 Automation Driver Levels of Automated Driving Driver continuously performs the longitudinal and lateral dynamic driving task Driver continuously
PSA Peugeot Citroën Driving Automation and Connectivity June 2015 Automation Driver Levels of Automated Driving Driver continuously performs the longitudinal and lateral dynamic driving task Driver continuously
Highly Automated Driving: Fiction or Future?
 The future of driving. Final Event Highly Automated Driving: Fiction or Future? Prof. Dr. Jürgen Leohold Volkswagen Group Research Motivation The driver as the unpredictable factor: Human error is the
The future of driving. Final Event Highly Automated Driving: Fiction or Future? Prof. Dr. Jürgen Leohold Volkswagen Group Research Motivation The driver as the unpredictable factor: Human error is the
INFRASTRUCTURE SYSTEMS FOR INTERSECTION COLLISION AVOIDANCE
 INFRASTRUCTURE SYSTEMS FOR INTERSECTION COLLISION AVOIDANCE Robert A. Ferlis Office of Operations Research and Development Federal Highway Administration McLean, Virginia USA E-mail: robert.ferlis@fhwa.dot.gov
INFRASTRUCTURE SYSTEMS FOR INTERSECTION COLLISION AVOIDANCE Robert A. Ferlis Office of Operations Research and Development Federal Highway Administration McLean, Virginia USA E-mail: robert.ferlis@fhwa.dot.gov
Safety for Self-driving Cars
 Tech.AD. 5-6 March, 2018 Berlin Safety for Self-driving Safety for Cars Self-driving Cars -Challenges and Some Solutions -Challenges and Some Solutions Author: Håkan Sivencrona, PhD Functional Jonas Nilsson,
Tech.AD. 5-6 March, 2018 Berlin Safety for Self-driving Safety for Cars Self-driving Cars -Challenges and Some Solutions -Challenges and Some Solutions Author: Håkan Sivencrona, PhD Functional Jonas Nilsson,
Active Safety Systems in Cars -Many semi-automated safety features are available today in new cars. -Building blocks for automated cars in the future.
 Active Safety Systems in Cars -Many semi-automated safety features are available today in new cars. -Building blocks for automated cars in the future. Eugene A. Petersen Tire Program Manager-CR For over
Active Safety Systems in Cars -Many semi-automated safety features are available today in new cars. -Building blocks for automated cars in the future. Eugene A. Petersen Tire Program Manager-CR For over
WHAT DOES OUR AUTONOMOUS FUTURE LOOK LIKE?
 WHAT DOES OUR AUTONOMOUS FUTURE LOOK LIKE? The US Military sponsored 3 challenges to see if unmanned vehicles could navigate difficult off-road terrain ( Iraq type war effort?) In 2004, DARPA (Defense
WHAT DOES OUR AUTONOMOUS FUTURE LOOK LIKE? The US Military sponsored 3 challenges to see if unmanned vehicles could navigate difficult off-road terrain ( Iraq type war effort?) In 2004, DARPA (Defense
Planning for AUTONOMOUS VEHICLES. Presentation on the planning implications of self-driving vehicles. by Ryan Snyder Transportation Planning Expert
 Planning for AUTONOMOUS VEHICLES Presentation on the planning implications of self-driving vehicles. by Ryan Snyder Transportation Planning Expert LEVELS OF AV TECHNOLOGY LEVEL 1 LEVEL 4 function-specific
Planning for AUTONOMOUS VEHICLES Presentation on the planning implications of self-driving vehicles. by Ryan Snyder Transportation Planning Expert LEVELS OF AV TECHNOLOGY LEVEL 1 LEVEL 4 function-specific
Autonomous VEHICLEs: A Perspective of Past and Future Trends
 Autonomous VEHICLEs: A Perspective of Past and Future Trends Aditya Bhat, B.E Mechanical (Pursuing) MIT College Of Engineering, Kothrud, Pune ABSTRACT: This paper provides an overview of the advancement
Autonomous VEHICLEs: A Perspective of Past and Future Trends Aditya Bhat, B.E Mechanical (Pursuing) MIT College Of Engineering, Kothrud, Pune ABSTRACT: This paper provides an overview of the advancement
END TO END NEEDS FOR AUTONOMOUS VEHICLES NORM MARKS SEPT. 6, 2018
 END TO END NEEDS FOR AUTONOMOUS VEHICLES NORM MARKS SEPT. 6, 2018 THE MOST EXCITING TIME IN TECH HISTORY GAMING $100B Industry ARTIFICIAL INTELLIGENCE $3T IT Industry AUTONOMOUS VEHICLES $10T Transportation
END TO END NEEDS FOR AUTONOMOUS VEHICLES NORM MARKS SEPT. 6, 2018 THE MOST EXCITING TIME IN TECH HISTORY GAMING $100B Industry ARTIFICIAL INTELLIGENCE $3T IT Industry AUTONOMOUS VEHICLES $10T Transportation
Introduction Projects Basic Design Perception Motion Planning Mission Planning Behaviour Conclusion. Autonomous Vehicles
 Dipak Chaudhari Sriram Kashyap M S 2008 Outline 1 Introduction 2 Projects 3 Basic Design 4 Perception 5 Motion Planning 6 Mission Planning 7 Behaviour 8 Conclusion Introduction Unmanned Vehicles: No driver
Dipak Chaudhari Sriram Kashyap M S 2008 Outline 1 Introduction 2 Projects 3 Basic Design 4 Perception 5 Motion Planning 6 Mission Planning 7 Behaviour 8 Conclusion Introduction Unmanned Vehicles: No driver
Steering Actuator for Autonomous Driving and Platooning *1
 TECHNICAL PAPER Steering Actuator for Autonomous Driving and Platooning *1 A. ISHIHARA Y. KUROUMARU M. NAKA The New Energy and Industrial Technology Development Organization (NEDO) is running a "Development
TECHNICAL PAPER Steering Actuator for Autonomous Driving and Platooning *1 A. ISHIHARA Y. KUROUMARU M. NAKA The New Energy and Industrial Technology Development Organization (NEDO) is running a "Development
Dr. Punarjay (Jay) Chakravarty
 Chakravarty") Dr. Punarjay (Jay) Chakravarty E-Mail: punarjay [at] gmail.com Website: http://www.jaychakravarty.com. Born: May 23, 1981. Residency: Australian citizen. Objective To pursue academic and industry-based
Dr. Punarjay (Jay) Chakravarty E-Mail: punarjay [at] gmail.com Website: http://www.jaychakravarty.com. Born: May 23, 1981. Residency: Australian citizen. Objective To pursue academic and industry-based
Smart Control for Electric/Autonomous Vehicles
 Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
Control of Mobile Robots
 Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
LiDAR Teach-In OSRAM Licht AG June 20, 2018 Munich Light is OSRAM
 www.osram.com LiDAR Teach-In June 20, 2018 Munich Light is OSRAM Agenda Introduction Autonomous driving LIDAR technology deep-dive LiDAR@OS: Emitter technologies Outlook LiDAR Tech Teach-In June 20, 2018
www.osram.com LiDAR Teach-In June 20, 2018 Munich Light is OSRAM Agenda Introduction Autonomous driving LIDAR technology deep-dive LiDAR@OS: Emitter technologies Outlook LiDAR Tech Teach-In June 20, 2018
Photoelectric Sensor Based Intelligent Track Racing Car
 Available online at www.sciencedirect.com Procedia Engineering 41 (2012 ) 588 592 International Symposium on Robotics and Intelligent Sensors 2012 (IRIS 2012) Photoelectric Sensor Based Intelligent Track
Available online at www.sciencedirect.com Procedia Engineering 41 (2012 ) 588 592 International Symposium on Robotics and Intelligent Sensors 2012 (IRIS 2012) Photoelectric Sensor Based Intelligent Track
Financial Planning Association of Michigan 2018 Fall Symposium Autonomous Vehicles Presentation
 Financial Planning Association of Michigan 2018 Fall Symposium Autonomous s Presentation 1 Katherine Ralston Program Manager, Autonomous s 2 FORD SECRET Why Autonomous s Societal Impact Great potential
Financial Planning Association of Michigan 2018 Fall Symposium Autonomous s Presentation 1 Katherine Ralston Program Manager, Autonomous s 2 FORD SECRET Why Autonomous s Societal Impact Great potential
STUDYING THE POSSIBILITY OF INCREASING THE FLIGHT AUTONOMY OF A ROTARY-WING MUAV
 SCIENTIFIC RESEARCH AND EDUCATION IN THE AIR FORCE AFASES2017 STUDYING THE POSSIBILITY OF INCREASING THE FLIGHT AUTONOMY OF A ROTARY-WING MUAV Cristian VIDAN *, Daniel MĂRĂCINE ** * Military Technical
SCIENTIFIC RESEARCH AND EDUCATION IN THE AIR FORCE AFASES2017 STUDYING THE POSSIBILITY OF INCREASING THE FLIGHT AUTONOMY OF A ROTARY-WING MUAV Cristian VIDAN *, Daniel MĂRĂCINE ** * Military Technical
ESTRO: Design and Development of Intelligent Autonomous Vehicle for Shuttle Service in the ETRI
 ESTRO: Design and Development of Intelligent Autonomous Vehicle for Shuttle Service in the ETRI Jaemin Byun, Ki-In Na, Myungchan Noh, Joochan Sohn and Sunghoon Kim Abstract ESTRO(ETRI Smart Transport RObot)
ESTRO: Design and Development of Intelligent Autonomous Vehicle for Shuttle Service in the ETRI Jaemin Byun, Ki-In Na, Myungchan Noh, Joochan Sohn and Sunghoon Kim Abstract ESTRO(ETRI Smart Transport RObot)
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm)
") Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) ADAS and Automated Driving Functionality Blessing and Curse Alfred Eckert, Head
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) ADAS and Automated Driving Functionality Blessing and Curse Alfred Eckert, Head
Poster ID-22 Use Robotics to Simulate Self- Driving Taxi
 Poster ID-22 Use Robotics to Simulate Self- Driving Taxi Mason Chen, Austina Xu, and Nikita Patel Morrill Learning Center, San Jose, CA 1 Abstract Self-driving car performance is of great research interests
Poster ID-22 Use Robotics to Simulate Self- Driving Taxi Mason Chen, Austina Xu, and Nikita Patel Morrill Learning Center, San Jose, CA 1 Abstract Self-driving car performance is of great research interests
China Intelligent Connected Vehicle Technology Roadmap 1
 China Intelligent Connected Vehicle Technology Roadmap 1 Source: 1. China Automotive Engineering Institute, , Oct. 2016 1 Technology Roadmap 1 General
China Intelligent Connected Vehicle Technology Roadmap 1 Source: 1. China Automotive Engineering Institute, , Oct. 2016 1 Technology Roadmap 1 General
EPSRC-JLR Workshop 9th December 2014 TOWARDS AUTONOMY SMART AND CONNECTED CONTROL
 EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
Unmanned autonomous vehicles in air land and sea
 based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
Vehicle Steering Control with Human-in-the-Loop
 Vehicle Steering Control with Human-in-the-Loop Mengzhe Huang, Weinan Gao, Zhong-Ping Jiang(IEEE/IFAC Fellow) Email: {m.huang, weinan.gao, zjiang}@nyu.edu} Control and Networks Lab, Department of Electrical
Vehicle Steering Control with Human-in-the-Loop Mengzhe Huang, Weinan Gao, Zhong-Ping Jiang(IEEE/IFAC Fellow) Email: {m.huang, weinan.gao, zjiang}@nyu.edu} Control and Networks Lab, Department of Electrical
Autnonomous Vehicles: Societal and Technological Evolution (Invited Contribution)
") Autnonomous Vehicles: Societal and Technological Evolution (Invited Contribution) Christian Laugier To cite this version: Christian Laugier. Autnonomous Vehicles: Societal and Technological Evolution (Invited
Autnonomous Vehicles: Societal and Technological Evolution (Invited Contribution) Christian Laugier To cite this version: Christian Laugier. Autnonomous Vehicles: Societal and Technological Evolution (Invited
Autonomous Mobile Robots and Intelligent Control Issues. Sven Seeland
 Autonomous Mobile Robots and Intelligent Control Issues Sven Seeland Overview Introduction Motivation History of Autonomous Cars DARPA Grand Challenge History and Rules Controlling Autonomous Cars MIT
Autonomous Mobile Robots and Intelligent Control Issues Sven Seeland Overview Introduction Motivation History of Autonomous Cars DARPA Grand Challenge History and Rules Controlling Autonomous Cars MIT
GOVERNMENT STATUS REPORT OF JAPAN
 GOVERNMENT STATUS REPORT OF JAPAN Hidenobu KUBOTA Director, Policy Planning Office for Automated Driving Technology, Engineering Policy Division, Road Transport Bureau, Ministry of Land, Infrastructure,
GOVERNMENT STATUS REPORT OF JAPAN Hidenobu KUBOTA Director, Policy Planning Office for Automated Driving Technology, Engineering Policy Division, Road Transport Bureau, Ministry of Land, Infrastructure,
AI Driven Environment Modeling for Autonomous Driving on NVIDIA DRIVE PX2
 AI Driven Environment Modeling for Autonomous Driving on NVIDIA DRIVE PX2 Dr. Alexey Abramov, Christopher Bayer, Dr. Claudio Heller, Claudia Loy Chassis & Safety Agenda 1 2 3 4 5 6 7 Introduction Autonomous
AI Driven Environment Modeling for Autonomous Driving on NVIDIA DRIVE PX2 Dr. Alexey Abramov, Christopher Bayer, Dr. Claudio Heller, Claudia Loy Chassis & Safety Agenda 1 2 3 4 5 6 7 Introduction Autonomous
LiDAR and the Autonomous Vehicle Revolution for Truck and Ride Sharing Fleets
 July 12, 2017 LiDAR and the Autonomous Vehicle Revolution for Truck and Ride Sharing Fleets Louay Eldada CEO and Co-founder, Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State
July 12, 2017 LiDAR and the Autonomous Vehicle Revolution for Truck and Ride Sharing Fleets Louay Eldada CEO and Co-founder, Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State
SMART CAR SYSTEM USING SENSOR, GPS AND GSM
 SMART CAR SYSTEM USING SENSOR, GPS AND GSM Prof. Sumantkumar Singh Thakur Electronics Engineering Department, Savitribai Phule Pune University Assistant Professor, P.K.Techanical Campus, Chakan Abstract
SMART CAR SYSTEM USING SENSOR, GPS AND GSM Prof. Sumantkumar Singh Thakur Electronics Engineering Department, Savitribai Phule Pune University Assistant Professor, P.K.Techanical Campus, Chakan Abstract
Autonomyof vehicles. Prof. dr. Jernej Klemenc, dr. Simon Oman
 Autonomyof vehicles Prof. dr. Jernej Klemenc, dr. Simon Oman 12. Julij 2018 Content Sensors and ICT (information communication technology) Data processing -identification of traffic signalization and various
Autonomyof vehicles Prof. dr. Jernej Klemenc, dr. Simon Oman 12. Julij 2018 Content Sensors and ICT (information communication technology) Data processing -identification of traffic signalization and various
Research Paper: Self-Driving Cars. By placing this statement on my webpage, I certify that I have read and understand the GMU
 Research: Self-Driving Cars 1 Jana Alghoraibi IT-104-002 10/1/2018 Research Paper: Self-Driving Cars By placing this statement on my webpage, I certify that I have read and understand the GMU Honor Code
Research: Self-Driving Cars 1 Jana Alghoraibi IT-104-002 10/1/2018 Research Paper: Self-Driving Cars By placing this statement on my webpage, I certify that I have read and understand the GMU Honor Code
Stereo-vision for Active Safety
 Stereo-vision for Active Safety Project within Vehicle and Traffic Safety, 2009-00078 Author: Vincent Mathevon (Autoliv Electronics AB) Ola Bostrom (Autoliv Development AB) Date: 2012-06-07 Content 1.
Stereo-vision for Active Safety Project within Vehicle and Traffic Safety, 2009-00078 Author: Vincent Mathevon (Autoliv Electronics AB) Ola Bostrom (Autoliv Development AB) Date: 2012-06-07 Content 1.