Hardware-In-the-Loop (HIL) Testbed for Evaluating Connected Vehicle Applications
|
|
|
- Merry Wiggins
- 6 years ago
- Views:
Transcription
1 Hardware-In-the-Loop (HIL) Testbed for Evaluating Connected Vehicle Applications Department of Mechanical Engineering University of Minnesota Project Members : Mohd Azrin Mohd Zulkefli Pratik Mukherjee Yunli Shao Prof. Zongxuan Sun Date : 10/16/15 (Friday) FPIRC
2 Presentation Outline Introduction Powertrain Research Platform Hardware-In-the-Loop (HIL) Testbed Introduction Test Results with Simple Traffic Network Test Results with Complex Traffic Network Conclusions Future Directions 2
3 Presentation Outline Introduction Powertrain Research Platform Hardware-In-the-Loop (HIL) Testbed Introduction Test Results with Simple Traffic Network Test Results with Complex Traffic Network Conclusions Future Directions 3
4 Background Road Site Unit Traffic Center Glossary IVC : Inter Vehicle Communication VII : Vehicle-Infrastructure-Integration DSRC : Dedicated Short Range Communication Intelligent Vehicles Travel direction Detectors IVC & VII are introduced to improve safety and mobility. Information exchange between vehicles are supported by : DSRC communication standards [1] : IEEE p Wireless Access in Vehicular Environments (WAVE). IEEE 1609 Security, Network Service & Multi Channel Operation. SAE J2735 Message Set Dictionary for Basic Safety Message (BSM). FCC Allocate GHz band for DSRC communication. 4
5 Motivation Evaluation of connected-vehicle application in real traffic is difficult and time consuming with safety and legal concerns. Inaccurate fuel and emission maps requires the use of real engine. Microscopic traffic simulation can mimic actual traffic if calibrated and driven by real traffic inputs. Previous Methods and Challenges Inaccurate fuel and emission maps in simulations [2]. Difficulties and space requirements to instrument on-road vehicles with big measurement devices [3-4]. Safety and legal concerns to test connected vehicle in real traffic [5]. Proposed Research Previous Methods Deficiencies HIL Testbed Development of HiLS for EMS Evaluation Inaccurate fuel-use and emission maps. Difficulties & space requirements to instrument on-road vehicles. Safety and legal concerns. HiLS measures real engine fuel-use and emissions. Testing done in lab & engine is easily instrumented and replaced. Realistic simulated traffic does not pose safety or legal concerns. 5
6 Presentation Outline Introduction Powertrain Research Platform Hardware-In-the-Loop (HIL) Testbed Introduction Test Results with Simple Traffic Network Test Results with Complex Traffic Network Conclusions Future Directions 6

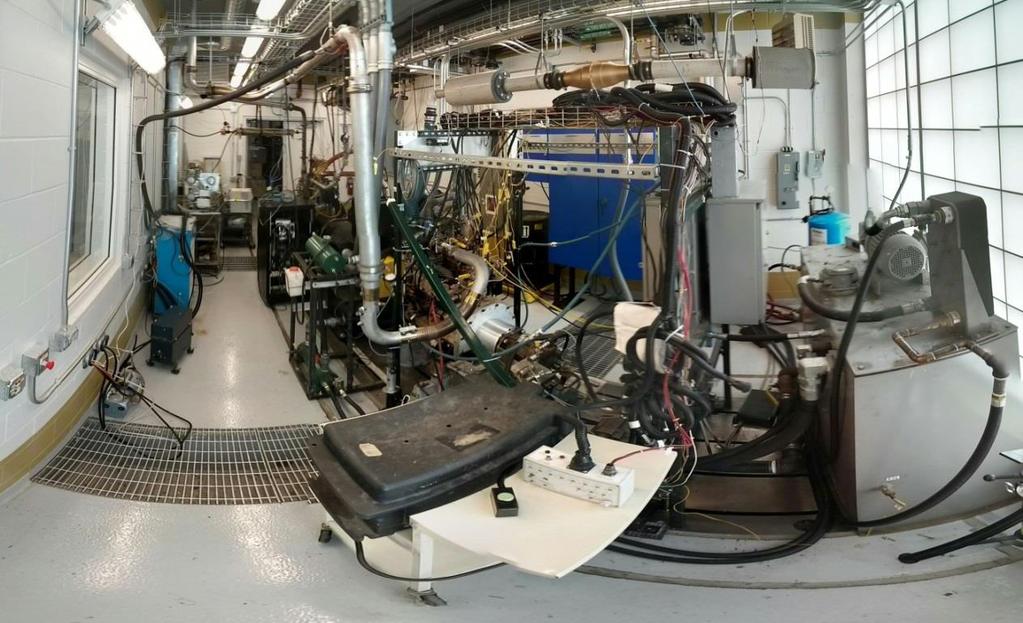
7 Powertrain Research Platform 7

8 Working Principles Hardware Components Main Dynamics ω e = T e J e T pump = T e J e J e T friction J e D M 2πJ e P out + D M 2πJ e P in T friction J e P out = β e V t2 q in β e V t2 q out β e V t2 = β ed M 2πV t2 q leak ω e β ec d A HS V t2 2 ρ P out w HS Wang, Y., Sun, Z., and Stelson, K.A., Modeling, Control, and Experimental Validation of a Transient Hydrostatic Dynamometer, Control Systems Technology, IEEE Transactions on, v19, n6, pp , Nov β e V t2 q leak Valve opening w HS is controlled to track ω e and engine throttle angle is used to control T e 8
9 Control Architecture Three-level control architecture : 1) High Level : EMS to optimize reference (T e, ω e ). 2) Middle Level : Virtual Powertrain Model calculate desired engine load. 3) Low Level : Dynamometer control - track desired engine load. Wang, Y., Sun, Z., and Stelson, K.A., Nonlinear Tracking Control of a Transient Hydrostatic Dynamometer for Hybrid Powertrain Research, Proceedings of the ASME 2010 Dynamic Systems and Control Conference, pp , September
10 Presentation Outline Introduction Powertrain Research Platform Hardware-In-the-Loop (HIL) Testbed Introduction Test Results with Simple Traffic Network Test Results with Complex Traffic Network Conclusions Future Directions 10



11 Overview of Hardware in the Loop System (HiLS) SMART-SIGNAL Field Data Processer Zoom-In intersection Powertrain Research Platform Signal Controller Cabinet Glossary Controller Middleware Middlewares to connect the different HiLS components Physical Components Software/Hardware Components Microscopic Traffic Simulator (VISSIM) Connected Veh Middleware Connected Veh Controller Powertrain Middleware HiLS Component Purpose Ownership Powertrain Research Platform Controls load to real engine for fuel & emission measurements. U of MN Microscopic Traffic Sim (VISSIM) Simulate traffic & provide speed trajectory to Powertrain Res. Platform. BOTH Connected Vehicle Controller Controls vehicles in VISSIM for connected vehicle applications. U of MN SMART-SIGNAL Provide real traffic input to VISSIM simulation. U of MI Signal Controller Cabinet Controls a virtual intersection in VISSIM. U of MI 11
12 HIL Testbed Powertrain Middleware Powertrain COM Desired-veh-speed is extracted from VISSIM, while actual-veh-speed is calculated from the powertrain dynamics using actual engine speed and torque. Powertrain Research Platform Remote computer running VISSIM Dyno (Hardware) Actual T e, ω e Powertrain Dynamics (Simulation) Desired/ Optimized T e, ω e MATLAB-Simulink Control/ Optimization Control of Powertrain model & Optimization Actual Veh Speed Des Veh Speed Desired Veh Speed VISSIM Input VISSIM COM Desired Veh Speed VISSIM Input VISSIM Traffic Simulator Traffic Solid arrows indicate local communication. Dashed arrows indicate remote communication via C# Socket Programming. 12
13 HIL Testbed Powertrain Middleware Powertrain COM Currently, one-way communication is implemented for testing before implementing two-way communication. Powertrain Research Platform Remote computer running VISSIM Dyno (Hardware) Desired/ Optimized T e, ω e MATLAB-Simulink Control/ Optimization Desired Veh Speed Desired Veh Speed VISSIM COM Desired Veh Speed VISSIM Traffic Simulator Actual T e, ω e Powertrain Dynamics (Simulation) Control of Powertrain model & Optimization Traffic Solid arrows indicate local communication. Dashed arrows indicate remote communication via C# Socket Programming. 13
14 Presentation Outline Introduction Powertrain Research Platform Hardware-In-the-Loop (HIL) Testbed Introduction Test Results with Simple Traffic Network Test Results with Complex Traffic Network Conclusions Future Directions 14

15 Test Setup : Traffic Network 1700 meters long with 7 traffic-lights (fixed-timing) at every 200m between 300m and 1500m. Vehicle speed data was transferred from a computer running VISSIM to powertrain research testbed remotely at every 0.2 seconds. Vehicle with no-stop, 1-stop, 2-stops and 3-stops were identified before tests were conducted for each vehicle. HIL Video 300m 1500m 15
16 Fuel Use & Emissions Vehicle Dynamics Test 1 : No Stop 16
17 Fuel Use & Emissions Vehicle Dynamics Test 2 : 1-Stop 17
18 Fuel Use & Emissions Vehicle Dynamics Test 3 : 2-Stop 18
19 Fuel Use & Emissions Vehicle Dynamics Test 4 : 3-Stop 19
20 Grams of diesel fuel Test Results : Fuel Consumption & Emissions Fuel Consumption Emissions HCHO NO2 CO Grams of HCHO, NO2, CO, NO and NOX NO NOx CO Grams of CO2 0 0 no-stop 1-stop 2-stops 3-stops 0 20
21 Presentation Outline Introduction Powertrain Research Platform Hardware-In-the-Loop (HIL) Testbed Introduction Test Results with Simple Traffic Network Test Results with Complex Traffic Network Conclusions Future Directions 21

22 Test Setup : Traffic Network 3.5km stretch on Medical Drive between Babcock Road & Fredericksburg Road in San Antonio, TX. Traffic Simulation Complexities : Multiple vehicle types : cars, busses & trucks. Multiple lanes with lane-changing. Varying speed limits for roads & lanes. 7 signalized & 6 non-signalized intersections. Reduced vehicle speeds, right-of-ways & pedestrian crossings at intersections. Stop signs at non-signalized intersections. Public transportation stops. Two vehicles with 2-stops & 3-stops traveling the same route are selected for test cases. 22
23 Fuel Use & Emissions Vehicle Dynamics Test 1 : 2-Stop 23
24 Fuel Use & Emissions Vehicle Dynamics Test 2 : 3-Stop 24
25 Test Results : Fuel Consumption & Emissions Grams of diesel fuel Fuel Consumption Emissions Grams of HCHO, NO2, CO, NO and NOX HCHO NO2 CO NO NOx CO Grams of CO2 0 2-stops 3-stops 0 2-stops 3-stops 0 25
26 Presentation Outline Introduction Powertrain Research Platform Hardware-In-the-Loop (HIL) Testbed Introduction Test Results with Simple Traffic Network Test Results with Complex Traffic Network Conclusions Future Directions 26
27 Conclusions Vehicle data from remote traffic simulation extracted and transferred in real-time to the powertrain research platform over the internet through COM interfaces and socket programming. Different vehicle speed profiles accurately tracked by powertrain research platform to represent the target vehicle in VISSIM simulation. Simple powertrain optimization employed in powertrain research platform to optimize engine operating points in real-time, which can be extended to complex optimization methods utilizing traffic data in the future. Real fuel and emissions measurements are recorded, which can be used to evaluate optimization methods for connected vehicle applications in the future. 27
28 Presentation Outline Introduction Powertrain Research Platform Hardware-In-the-Loop (HIL) Testbed Introduction Test Results with Simple Traffic Network Test Results with Complex Traffic Network Conclusions Future Directions 28
29 Future Directions Upgrade one-directional communication to two-directional to reflect actual vehicle speed from powertrain research platform in VISSIM simulation. Build connected vehicle controller and middleware to process traffic data from VISSIM simulation. Calibrate VISSIM traffic simulation with real-traffic from data collected on instrumented vehicle and highway (cooperation with MnDOT). Support the benefits evaluations of connected vehicle technologies from accurate fuel consumption and emissions measurements on the testbed. Support benefit assessments of several USDOT s connected vehicle applications : Eco-Approach, CACC, Eco-Driving and Speed Harmonization. 29
30 References 1. Kenney, J.B., Dedicated Short-Range Communications (DSRC) Standards in the United States, Proceedings of the IEEE, v99, n7, pp , July Filipi, Z., Fathy, H., Hagena, J., Knafl, A. et al., Engine-in-the-Loop Testing for Evaluating Hybrid Propulsion Concepts and Transient Emissions - HMMWV Case Study, SAE Technical Paper , Duoba, M., Ng, H., and Larsen, R., Characterization and Comparison of Two Hybrid Electric Vehicles (HEVs) - Honda Insight and Toyota Prius, SAE Technical Paper , Hu, H., Zou, Z., and Yang, H., On-board Measurements of City Buses with Hybrid Electric Powertrain, Conventional Diesel and LPG Engines, SAE Technical Paper , Hall, R.W. and Tsao, H.S.J., Automated Highway System Deployment: A Preliminary Assessment of Uncertainties, Automated Highway Systems, pp ,
31 Backup Slide 1 : CACC Controller x d = k p (x p x d_a d 0 ) + k d ( x p x d_a ) + x p x d = x d dt x p x p x p x d_a x d_a x d d 0 = Preceding-vehicle speed (from VISSIM) = Preceding-vehicle acceleration (from VISSIM) = Preceding-vehicle distance travelled (from VISSIM) = Actual follower-vehicle speed (from HIL) = Actual follower-vehicle distance travelled (from HIL) = Desired follower-vehicle speed (CACC controller output) = Desired spacing (constant) By choosing appropriate k p and k d gains, the error dynamics will stabilize to zero. Therefore, the distance between preceding and following vehicle can be kept constant. 31
32 Backup Slide 2 : HIL Testbed with Embedded CACC Controller Powertrain COM Vehicle speed extracted from VISSIM is assumed to be lead vehicle speed CACC controller use this information to calculate follower vehicle speed using fixedspacing car-following policy. Dyno acts as the follower car. Powertrain Research Platform Remote computer running VISSIM Dyno (Hardware) Desired/ Optimized T e, ω e Control/ Optimization Follower Veh Speed CACC Controller Lead Veh Speed Lead Veh Speed VISSIM COM Lead Veh Speed VISSIM Traffic Simulator Actual T e, ω e Powertrain Dynamics (Simulation) Control of Powertrain model & Optimization MATLAB-Simulink 32
33 Test Results Follower vehicle enters traffic network 20s after lead vehicle enters Follower vehicle catches-up with lead and maintain 3-meters (10 feet) spacing Zoom In between 80s - 200s 33
34 Emissions Vehicle Dynamics Results with CACC Controller (Different Rule- Based EMS) Fuel or Emission Gas Fuel Consumed (g) NO x (g) NO (g) NO 2 (g) HCHO (g) CO (g) CO 2 (g) Total
35 Backup 3 : Rule Based Method P wheel = T v ω v PSOC = SOC target SOC K fit Rule-Based Map for John Deere Engine P req = P wheel + P SOC T e = P e ω e = P req ω e Iterate ω e and select minimum m fuel T e, ω e. A Rule-Based map can be iterated offline at different values of P req to create a mapped correlation between minimum m fuel T e, ω e and P req (see Figure above) 35
Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications
 Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications Jiaqi Ma Assistant Professor University of Cincinnati ITS Midwest Annual Meeting Columbus, Ohio, September 29, 2017 Outline
Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications Jiaqi Ma Assistant Professor University of Cincinnati ITS Midwest Annual Meeting Columbus, Ohio, September 29, 2017 Outline
COUPLING HIL-SIMULATION, ENGINE TESTING AND AUTOSAR- COMPLIANT CONTROL UNITS FOR HYBRID TESTING
 UNIVERSITY OF PITESTI FACULTY OF MECHANICS AND TECHNOLOGY SCIENTIFIC BULLETIN AUTOMOTIVE series, year XV, no.19, vol. B COUPLING HIL-SIMULATION, ENGINE TESTING AND AUTOSAR- COMPLIANT CONTROL UNITS FOR
UNIVERSITY OF PITESTI FACULTY OF MECHANICS AND TECHNOLOGY SCIENTIFIC BULLETIN AUTOMOTIVE series, year XV, no.19, vol. B COUPLING HIL-SIMULATION, ENGINE TESTING AND AUTOSAR- COMPLIANT CONTROL UNITS FOR
APCO International. Emerging Technology Forum
 APCO International Emerging Technology Forum Emerging Vehicle to Vehicle, Vehicle to Infrastructure Communications Cars talking to each other and talking to the supporting highway infrastructure The Regulatory
APCO International Emerging Technology Forum Emerging Vehicle to Vehicle, Vehicle to Infrastructure Communications Cars talking to each other and talking to the supporting highway infrastructure The Regulatory
Traffic Operations with Connected and Automated Vehicles
 Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
Test & Validation Challenges Facing ADAS and CAV
 Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System
 System") Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System 2017 Los Angeles Environmental Forum August 28th Ziran Wang ( 王子然 ), Guoyuan Wu, Peng Hao, Kanok Boriboonsomsin, and Matthew
Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System 2017 Los Angeles Environmental Forum August 28th Ziran Wang ( 王子然 ), Guoyuan Wu, Peng Hao, Kanok Boriboonsomsin, and Matthew
VIRTUAL HYBRID ON THE ENGINE TEST BENCH SMART FRONTLOADING
 VIRTUAL HYBRID ON THE ENGINE TEST BENCH SMART FRONTLOADING RDE ENGINEERING [EIL] J. GERSTENBERG, DR. S. STERZING-OPPEL, C. FISCHER, B. SEIDEL, D. TRENKLE, M. OFF, DR. M. GLORA Overview RDE tool chain Virtual
VIRTUAL HYBRID ON THE ENGINE TEST BENCH SMART FRONTLOADING RDE ENGINEERING [EIL] J. GERSTENBERG, DR. S. STERZING-OPPEL, C. FISCHER, B. SEIDEL, D. TRENKLE, M. OFF, DR. M. GLORA Overview RDE tool chain Virtual
Powertrain and Chassis Hardware-in-the- Loop (HIL) Simulation of Ford s Autonomous Vehicle Platform
 Simulation of Ford s Autonomous Vehicle Platform") Powertrain and Chassis Hardware-in-the- Loop (HIL) Simulation of Ford s Autonomous Vehicle Platform Adit Joshi Research Engineer Automated Driving HIL Simulation Ford Motor Company 1 OUTLINE Autonomous
Powertrain and Chassis Hardware-in-the- Loop (HIL) Simulation of Ford s Autonomous Vehicle Platform Adit Joshi Research Engineer Automated Driving HIL Simulation Ford Motor Company 1 OUTLINE Autonomous
Optimal energy efficiency, vehicle stability and safety on the OpEneR EV with electrified front and rear axles
 Optimal energy efficiency, vehicle stability and safety on the OpEneR EV with electrified front and rear axles Berlin, Monday 17 June 2013 Dr. Stephen Jones, AVL Emre Kural, AVL Alexander Massoner, AVL
Optimal energy efficiency, vehicle stability and safety on the OpEneR EV with electrified front and rear axles Berlin, Monday 17 June 2013 Dr. Stephen Jones, AVL Emre Kural, AVL Alexander Massoner, AVL
Simulation of the influence of road traffic on the operation of an electric city bus
 Simulation of the influence of road traffic on the operation of apply & innovate 2014 Manuel Großkinsky Chair of railway system technology, Karlsruhe Institute of Technology KIT University of the State
Simulation of the influence of road traffic on the operation of apply & innovate 2014 Manuel Großkinsky Chair of railway system technology, Karlsruhe Institute of Technology KIT University of the State
NHTSA Update: Connected Vehicles V2V Communications for Safety
 NHTSA Update: Connected Vehicles V2V Communications for Safety Alrik L. Svenson Transportation Research Board Meeting Washington, D.C. January 12, 2015 This is US Government work and may be copied without
NHTSA Update: Connected Vehicles V2V Communications for Safety Alrik L. Svenson Transportation Research Board Meeting Washington, D.C. January 12, 2015 This is US Government work and may be copied without
Simulink as a Platform for Full Vehicle Simulation
 Simulink as a Platform for Full Vehicle Simulation Mike Sasena (Product Manager) Lars Krause (Application Engineer) Ryan Chladny (Development) 2018 The MathWorks, Inc. 1 Fuel Economy Simulation 2 Vehicle
Simulink as a Platform for Full Vehicle Simulation Mike Sasena (Product Manager) Lars Krause (Application Engineer) Ryan Chladny (Development) 2018 The MathWorks, Inc. 1 Fuel Economy Simulation 2 Vehicle
Model-Based Design and Hardware-in-the-Loop Simulation for Clean Vehicles Bo Chen, Ph.D.
 Model-Based Design and Hardware-in-the-Loop Simulation for Clean Vehicles Bo Chen, Ph.D. Dave House Associate Professor of Mechanical Engineering and Electrical Engineering Department of Mechanical Engineering
Model-Based Design and Hardware-in-the-Loop Simulation for Clean Vehicles Bo Chen, Ph.D. Dave House Associate Professor of Mechanical Engineering and Electrical Engineering Department of Mechanical Engineering
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY
 UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
Full Vehicle Simulation for Electrification and Automated Driving Applications
 Full Vehicle Simulation for Electrification and Automated Driving Applications Vijayalayan R & Prasanna Deshpande Control Design Application Engineering 2015 The MathWorks, Inc. 1 Key Trends in Automotive
Full Vehicle Simulation for Electrification and Automated Driving Applications Vijayalayan R & Prasanna Deshpande Control Design Application Engineering 2015 The MathWorks, Inc. 1 Key Trends in Automotive
Low Carbon Technology Project Workstream 8 Vehicle Dynamics and Traction control for Maximum Energy Recovery
 Low Carbon Technology Project Workstream 8 Vehicle Dynamics and Traction control for Maximum Energy Recovery Phil Barber CENEX Technical review 19 th May 2011 Overview of WS8 Workstream 8 was set up to
Low Carbon Technology Project Workstream 8 Vehicle Dynamics and Traction control for Maximum Energy Recovery Phil Barber CENEX Technical review 19 th May 2011 Overview of WS8 Workstream 8 was set up to
A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications
 Systems: Architectures, Controls, and Applications") A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications Ziran Wang (presenter), Guoyuan Wu, and Matthew J. Barth University of California, Riverside Nov.
A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications Ziran Wang (presenter), Guoyuan Wu, and Matthew J. Barth University of California, Riverside Nov.
INTELLIGENT ENERGY MANAGEMENT IN A TWO POWER-BUS VEHICLE SYSTEM
 2011 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM MODELING & SIMULATION, TESTING AND VALIDATION (MSTV) MINI-SYMPOSIUM AUGUST 9-11 DEARBORN, MICHIGAN INTELLIGENT ENERGY MANAGEMENT IN
2011 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM MODELING & SIMULATION, TESTING AND VALIDATION (MSTV) MINI-SYMPOSIUM AUGUST 9-11 DEARBORN, MICHIGAN INTELLIGENT ENERGY MANAGEMENT IN
C-ITS status in Europe and Outlook
 C-ITS status in Europe and Outlook Car 2 Car Communication Consortium ITU Seminar 7 th June 2018 Car 2 Car Communication Consortium Communication Technology Basis ITS-G5 Dedicated Short-Range Communication
C-ITS status in Europe and Outlook Car 2 Car Communication Consortium ITU Seminar 7 th June 2018 Car 2 Car Communication Consortium Communication Technology Basis ITS-G5 Dedicated Short-Range Communication
Implementation and application of Simpackmulti-attribute vehicle models at Toyota Motor Europe
 Implementation and application of Simpackmulti-attribute vehicle models at Toyota Motor Europe Ernesto Mottola, PhD. Takao Sugai Vehicle Performance Engineering Toyota Motor Europe NV/SA Technical Center
Implementation and application of Simpackmulti-attribute vehicle models at Toyota Motor Europe Ernesto Mottola, PhD. Takao Sugai Vehicle Performance Engineering Toyota Motor Europe NV/SA Technical Center
Regenerative Braking System for Series Hybrid Electric City Bus
 Page 0363 Regenerative Braking System for Series Hybrid Electric City Bus Junzhi Zhang*, Xin Lu*, Junliang Xue*, and Bos Li* Regenerative Braking Systems (RBS) provide an efficient method to assist hybrid
Page 0363 Regenerative Braking System for Series Hybrid Electric City Bus Junzhi Zhang*, Xin Lu*, Junliang Xue*, and Bos Li* Regenerative Braking Systems (RBS) provide an efficient method to assist hybrid
Modelling of Diesel Vehicle Emissions under transient conditions
 Modelling of Diesel Vehicle Emissions under transient conditions Dr. Gavin Dober Combustion and Hydraulics Manager, Davide Del Pozzo Delphi Trainee 216-217 Advanced Injection & Combustion Center Delphi
Modelling of Diesel Vehicle Emissions under transient conditions Dr. Gavin Dober Combustion and Hydraulics Manager, Davide Del Pozzo Delphi Trainee 216-217 Advanced Injection & Combustion Center Delphi
Five Cool Things You Can Do With Powertrain Blockset The MathWorks, Inc. 1
 Five Cool Things You Can Do With Powertrain Blockset Mike Sasena, PhD Automotive Product Manager 2017 The MathWorks, Inc. 1 FTP75 Simulation 2 Powertrain Blockset Value Proposition Perform fuel economy
Five Cool Things You Can Do With Powertrain Blockset Mike Sasena, PhD Automotive Product Manager 2017 The MathWorks, Inc. 1 FTP75 Simulation 2 Powertrain Blockset Value Proposition Perform fuel economy
Vehicle Simulation for Engine Calibration to Enhance RDE Performance
 Vehicle Simulation for Engine Calibration to Enhance RDE Performance IPG Apply & Innovate 2018 11st and 12nd of September, Karlsruhe, Germany Dr. Yutaka Murata Yui Nishio Dr. Yukihisa Yamaya Masato Kikuchi
Vehicle Simulation for Engine Calibration to Enhance RDE Performance IPG Apply & Innovate 2018 11st and 12nd of September, Karlsruhe, Germany Dr. Yutaka Murata Yui Nishio Dr. Yukihisa Yamaya Masato Kikuchi
Calibration. DOE & Statistical Modeling
 ETAS Webinar - ASCMO Calibration. DOE & Statistical Modeling Injection Consumption Ignition Torque AFR HC EGR P-rail NOx Inlet-cam Outlet-cam 1 1 Soot T-exhaust Roughness What is Design of Experiments?
ETAS Webinar - ASCMO Calibration. DOE & Statistical Modeling Injection Consumption Ignition Torque AFR HC EGR P-rail NOx Inlet-cam Outlet-cam 1 1 Soot T-exhaust Roughness What is Design of Experiments?
INFRASTRUCTURE SYSTEMS FOR INTERSECTION COLLISION AVOIDANCE
 INFRASTRUCTURE SYSTEMS FOR INTERSECTION COLLISION AVOIDANCE Robert A. Ferlis Office of Operations Research and Development Federal Highway Administration McLean, Virginia USA E-mail: robert.ferlis@fhwa.dot.gov
INFRASTRUCTURE SYSTEMS FOR INTERSECTION COLLISION AVOIDANCE Robert A. Ferlis Office of Operations Research and Development Federal Highway Administration McLean, Virginia USA E-mail: robert.ferlis@fhwa.dot.gov
Fuzzy based Adaptive Control of Antilock Braking System
 Fuzzy based Adaptive Control of Antilock Braking System Ujwal. P Krishna. S M.Tech Mechatronics, Asst. Professor, Mechatronics VIT University, Vellore, India VIT university, Vellore, India Abstract-ABS
Fuzzy based Adaptive Control of Antilock Braking System Ujwal. P Krishna. S M.Tech Mechatronics, Asst. Professor, Mechatronics VIT University, Vellore, India VIT university, Vellore, India Abstract-ABS
Ming Cheng, Bo Chen, Michigan Technological University
 THE MODEL INTEGRATION AND HARDWARE-IN-THE-LOOP (HIL) SIMULATION DESIGN FOR THE ANALYSIS OF A POWER-SPLIT HYBRID ELECTRIC VEHICLE WITH ELECTROCHEMICAL BATTERY MODEL Ming Cheng, Bo Chen, Michigan Technological
THE MODEL INTEGRATION AND HARDWARE-IN-THE-LOOP (HIL) SIMULATION DESIGN FOR THE ANALYSIS OF A POWER-SPLIT HYBRID ELECTRIC VEHICLE WITH ELECTROCHEMICAL BATTERY MODEL Ming Cheng, Bo Chen, Michigan Technological
European Conference on Nanoelectronics and Embedded Systems for Electric Mobility. Internet of Energy Ecosystems Solutions
 European Conference on Nanoelectronics and Embedded Systems for Electric Mobility ecocity emotion 24-25 th September 2014, Erlangen, Germany Internet of Energy Ecosystems Solutions Dr. Randolf Mock, Siemens
European Conference on Nanoelectronics and Embedded Systems for Electric Mobility ecocity emotion 24-25 th September 2014, Erlangen, Germany Internet of Energy Ecosystems Solutions Dr. Randolf Mock, Siemens
Predictive Control Strategies using Simulink
 Example slide Predictive Control Strategies using Simulink Kiran Ravindran, Ashwini Athreya, HEV-SW, EE/MBRDI March 2014 Project Overview 2 Predictive Control Strategies using Simulink Kiran Ravindran
Example slide Predictive Control Strategies using Simulink Kiran Ravindran, Ashwini Athreya, HEV-SW, EE/MBRDI March 2014 Project Overview 2 Predictive Control Strategies using Simulink Kiran Ravindran
Transforming the US Electric Grid
 Driving economic growth, innovation, and workforce development Transforming the US Electric Grid Supply Network Demand Traditional Generation (Coal, Gas, Nuclear, Hydro) Solar Wind Biomass Energy Storage
Driving economic growth, innovation, and workforce development Transforming the US Electric Grid Supply Network Demand Traditional Generation (Coal, Gas, Nuclear, Hydro) Solar Wind Biomass Energy Storage
Power Pack Testing at Environment Canada s Testing Facilities Heavy-Duty Vehicle and Engine Greenhouse Gas Emission Regulations
 Power Pack Testing at Environment Canada s Testing Facilities Heavy-Duty Vehicle and Engine Greenhouse Gas Emission Regulations San Francisco, CA, USA October 22, 2013. Outline Background Heavy-Duty Vehicle
Power Pack Testing at Environment Canada s Testing Facilities Heavy-Duty Vehicle and Engine Greenhouse Gas Emission Regulations San Francisco, CA, USA October 22, 2013. Outline Background Heavy-Duty Vehicle
DESIGN AND EXPERIMENTAL VALIDATION OF A VIRTUAL VEHICLE CONTROL CONCEPT FOR TESTING HYBRID VEHICLES USING A HYDROSTATIC DYNAMOMETER
 Proceedings of 2014 ASME Dynamic Systems and Control Conference ASME DSCC 2014 October 22-October 24, 2014, San Antonio, USA DSCC2014-6290 DESIGN AND EXPERIMENTAL VALIDATION OF A VIRTUAL VEHICLE CONTROL
Proceedings of 2014 ASME Dynamic Systems and Control Conference ASME DSCC 2014 October 22-October 24, 2014, San Antonio, USA DSCC2014-6290 DESIGN AND EXPERIMENTAL VALIDATION OF A VIRTUAL VEHICLE CONTROL
Stan Caldwell Executive Director Traffic21 Institute Carnegie Mellon University
 Stan Caldwell Executive Director Traffic21 Institute Carnegie Mellon University Connected Vehicles Dedicated Short Range Communication (DSRC) Safer cars. Safer Drivers. Safer roads. Thank You! Tim Johnson
Stan Caldwell Executive Director Traffic21 Institute Carnegie Mellon University Connected Vehicles Dedicated Short Range Communication (DSRC) Safer cars. Safer Drivers. Safer roads. Thank You! Tim Johnson
Modeling Driver Behavior in a Connected Environment Integration of Microscopic Traffic Simulation and Telecommunication Systems.
 Modeling Driver Behavior in a Connected Environment Integration of Microscopic Traffic Simulation and Telecommunication Systems Alireza Talebpour Information Level Connectivity in the Modern Age Sensor
Modeling Driver Behavior in a Connected Environment Integration of Microscopic Traffic Simulation and Telecommunication Systems Alireza Talebpour Information Level Connectivity in the Modern Age Sensor
Modeling and Simulate Automotive Powertrain Systems
 Modeling and Simulate Automotive Powertrain Systems Maurizio Dalbard 2015 The MathWorks, Inc. 1 Model-Based Design Challenges It s hard to do good Model-Based Design without good models Insufficient expertise
Modeling and Simulate Automotive Powertrain Systems Maurizio Dalbard 2015 The MathWorks, Inc. 1 Model-Based Design Challenges It s hard to do good Model-Based Design without good models Insufficient expertise
Fleet Penetration of Automated Vehicles: A Microsimulation Analysis
 Fleet Penetration of Automated Vehicles: A Microsimulation Analysis Corresponding Author: Elliot Huang, P.E. Co-Authors: David Stanek, P.E. Allen Wang 2017 ITE Western District Annual Meeting San Diego,
Fleet Penetration of Automated Vehicles: A Microsimulation Analysis Corresponding Author: Elliot Huang, P.E. Co-Authors: David Stanek, P.E. Allen Wang 2017 ITE Western District Annual Meeting San Diego,
The MathWorks Crossover to Model-Based Design
 The MathWorks Crossover to Model-Based Design The Ohio State University Kerem Koprubasi, Ph.D. Candidate Mechanical Engineering The 2008 Challenge X Competition Benefits of MathWorks Tools Model-based
The MathWorks Crossover to Model-Based Design The Ohio State University Kerem Koprubasi, Ph.D. Candidate Mechanical Engineering The 2008 Challenge X Competition Benefits of MathWorks Tools Model-based
Modeling the Electrically Assisted Variable Speed (EAVS) Supercharger
 Supercharger") Modeling the Electrically Assisted Variable Speed (EAVS) Supercharger Eaton Corporation Vehicle Group Brian Smith Brandon Biller Overview of EAVS Technology 2 EAVS System Development at Eaton Hardware
Modeling the Electrically Assisted Variable Speed (EAVS) Supercharger Eaton Corporation Vehicle Group Brian Smith Brandon Biller Overview of EAVS Technology 2 EAVS System Development at Eaton Hardware
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help?
 Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
SIMULATION AND DATA XPERIENCE
 SIMULATION AND DATA XPERIENCE AVL Solutions Overview in context of RDE AVL List GmbH Dr. F. Pfister, Dr. C. Schyr, Dr. T. Düser, B. Schick, Dr. B. Behr CHALLENGES OF REAL DRIVING EMISSION Real Driving
SIMULATION AND DATA XPERIENCE AVL Solutions Overview in context of RDE AVL List GmbH Dr. F. Pfister, Dr. C. Schyr, Dr. T. Düser, B. Schick, Dr. B. Behr CHALLENGES OF REAL DRIVING EMISSION Real Driving
PHEV Control Strategy Optimization Using MATLAB Distributed Computing: From Pattern to Tuning
 PHEV Control Strategy Optimization Using MATLAB Distributed Computing: From Pattern to Tuning MathWorks Automotive Conference 3 June, 2008 S. Pagerit, D. Karbowski, S. Bittner, A. Rousseau, P. Sharer Argonne
PHEV Control Strategy Optimization Using MATLAB Distributed Computing: From Pattern to Tuning MathWorks Automotive Conference 3 June, 2008 S. Pagerit, D. Karbowski, S. Bittner, A. Rousseau, P. Sharer Argonne
Vehicle Performance. Pierre Duysinx. Research Center in Sustainable Automotive Technologies of University of Liege Academic Year
 Vehicle Performance Pierre Duysinx Research Center in Sustainable Automotive Technologies of University of Liege Academic Year 2015-2016 1 Lesson 4: Fuel consumption and emissions 2 Outline FUEL CONSUMPTION
Vehicle Performance Pierre Duysinx Research Center in Sustainable Automotive Technologies of University of Liege Academic Year 2015-2016 1 Lesson 4: Fuel consumption and emissions 2 Outline FUEL CONSUMPTION
What do autonomous vehicles mean to traffic congestion and crash? Network traffic flow modeling and simulation for autonomous vehicles
 What do autonomous vehicles mean to traffic congestion and crash? Network traffic flow modeling and simulation for autonomous vehicles FINAL RESEARCH REPORT Sean Qian (PI), Shuguan Yang (RA) Contract No.
What do autonomous vehicles mean to traffic congestion and crash? Network traffic flow modeling and simulation for autonomous vehicles FINAL RESEARCH REPORT Sean Qian (PI), Shuguan Yang (RA) Contract No.
Co-Simulation of GT-Suite and CarMaker for Real Traffic and Race Track Simulations
 Co-Simulation of GT-Suite and CarMaker for Real Traffic and Race Track Simulations GT-Suite Conference Frankfurt, 26 th October 215 Andreas Balazs, BGA-T Agenda Introduction Methodology FEV GT-Drive model
Co-Simulation of GT-Suite and CarMaker for Real Traffic and Race Track Simulations GT-Suite Conference Frankfurt, 26 th October 215 Andreas Balazs, BGA-T Agenda Introduction Methodology FEV GT-Drive model
The intelligent Truck safe, autonomous, connected. N. Mustafa Üstertuna Mercedes-Benz Türk A.Ş.
 The intelligent Truck safe, autonomous, connected N. Mustafa Üstertuna Mercedes-Benz Türk A.Ş. Challenges in the transportation industry Accidents Short Delivery Times On-Highway Traffic Urban Pollution
The intelligent Truck safe, autonomous, connected N. Mustafa Üstertuna Mercedes-Benz Türk A.Ş. Challenges in the transportation industry Accidents Short Delivery Times On-Highway Traffic Urban Pollution
SIL, HIL, and Vehicle Fuel Economy Analysis of a Pre- Transmission Parallel PHEV
 EVS27 Barcelona, Spain, November 17-20, 2013 SIL, HIL, and Vehicle Fuel Economy Analysis of a Pre- Transmission Parallel PHEV Jonathan D. Moore and G. Marshall Molen Mississippi State University Jdm833@msstate.edu
EVS27 Barcelona, Spain, November 17-20, 2013 SIL, HIL, and Vehicle Fuel Economy Analysis of a Pre- Transmission Parallel PHEV Jonathan D. Moore and G. Marshall Molen Mississippi State University Jdm833@msstate.edu
INCREASING ENERGY EFFICIENCY BY MODEL BASED DESIGN
 INCREASING ENERGY EFFICIENCY BY MODEL BASED DESIGN GREGORY PINTE THE MATHWORKS CONFERENCE 2015 EINDHOVEN 23/06/2015 FLANDERS MAKE Strategic Research Center for the manufacturing industry Integrating the
INCREASING ENERGY EFFICIENCY BY MODEL BASED DESIGN GREGORY PINTE THE MATHWORKS CONFERENCE 2015 EINDHOVEN 23/06/2015 FLANDERS MAKE Strategic Research Center for the manufacturing industry Integrating the
TRAFFIC CONTROL. in a Connected Vehicle World
 TRAFFIC CONTROL in a Connected Vehicle World Preparing for the advent of Connected Vehicles and their impact on traffic management and signalized intersection control. Frank Provenzano, Director of Business
TRAFFIC CONTROL in a Connected Vehicle World Preparing for the advent of Connected Vehicles and their impact on traffic management and signalized intersection control. Frank Provenzano, Director of Business
SIMULATING AUTONOMOUS VEHICLES ON OUR TRANSPORT NETWORKS
 SIMULATING AUTONOMOUS VEHICLES ON OUR TRANSPORT NETWORKS www.ptvgroup.com Alastair Evanson, Solution Director PTV Vissim TOMORROW S CONNECTED & BUSINESS AUTONOMOUS MODEL: VEHICLES SIGNIFICANT SHIFT TO
SIMULATING AUTONOMOUS VEHICLES ON OUR TRANSPORT NETWORKS www.ptvgroup.com Alastair Evanson, Solution Director PTV Vissim TOMORROW S CONNECTED & BUSINESS AUTONOMOUS MODEL: VEHICLES SIGNIFICANT SHIFT TO
Real-world to Lab Robust measurement requirements for future vehicle powertrains
 Real-world to Lab Robust measurement requirements for future vehicle powertrains Andrew Lewis, Edward Chappell, Richard Burke, Sam Akehurst, Simon Pickering University of Bath Simon Regitz, David R Rogers
Real-world to Lab Robust measurement requirements for future vehicle powertrains Andrew Lewis, Edward Chappell, Richard Burke, Sam Akehurst, Simon Pickering University of Bath Simon Regitz, David R Rogers
Switching Control for Smooth Mode Changes in Hybrid Electric Vehicles
 Switching Control for Smooth Mode Changes in Hybrid Electric Vehicles Kerem Koprubasi (1), Eric Westervelt (2), Giorgio Rizzoni (3) (1) PhD Student, (2) Assistant Professor, (3) Professor Department of
Switching Control for Smooth Mode Changes in Hybrid Electric Vehicles Kerem Koprubasi (1), Eric Westervelt (2), Giorgio Rizzoni (3) (1) PhD Student, (2) Assistant Professor, (3) Professor Department of
Building Fast and Accurate Powertrain Models for System and Control Development
 Building Fast and Accurate Powertrain Models for System and Control Development Prasanna Deshpande 2015 The MathWorks, Inc. 1 Challenges for the Powertrain Engineering Teams How to design and test vehicle
Building Fast and Accurate Powertrain Models for System and Control Development Prasanna Deshpande 2015 The MathWorks, Inc. 1 Challenges for the Powertrain Engineering Teams How to design and test vehicle
Opportunistic Energy Sharing Between Power Grid and Electric Vehicles: A Game Theory-based Nonlinear Pricing Policy
 Opportunistic Energy Sharing Between Power Grid and Electric Vehicles: A Game Theory-based Nonlinear Pricing Policy Ankur Sarker, Zhuozhao Li, William Kolodzey,, and Haiying Shen Department of Computer
Opportunistic Energy Sharing Between Power Grid and Electric Vehicles: A Game Theory-based Nonlinear Pricing Policy Ankur Sarker, Zhuozhao Li, William Kolodzey,, and Haiying Shen Department of Computer
Cooperative Autonomous Driving and Interaction with Vulnerable Road Users
 9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
Vehicle Dynamics and Drive Control for Adaptive Cruise Vehicles
 Vehicle Dynamics and Drive Control for Adaptive Cruise Vehicles Dileep K 1, Sreepriya S 2, Sreedeep Krishnan 3 1,3 Assistant Professor, Dept. of AE&I, ASIET Kalady, Kerala, India 2Associate Professor,
Vehicle Dynamics and Drive Control for Adaptive Cruise Vehicles Dileep K 1, Sreepriya S 2, Sreedeep Krishnan 3 1,3 Assistant Professor, Dept. of AE&I, ASIET Kalady, Kerala, India 2Associate Professor,
Assessment of ACC and CACC systems using SUMO
 SUMO User Conference 2018 Simulating Autonomous and Intermodal Transport Systems Assessment of ACC and CACC systems using SUMO Center for Research & Technology Hellas, Hellenic Institute of Transport Kallirroi
SUMO User Conference 2018 Simulating Autonomous and Intermodal Transport Systems Assessment of ACC and CACC systems using SUMO Center for Research & Technology Hellas, Hellenic Institute of Transport Kallirroi
Modeling, Control Design, Estimation and Diagnostics Algorithms MATLAB/Simulink, dspace, Microsoft Office
 Postdoctoral Researcher Energy, Controls, and Applications Lab Department of Civil and Enviromental Engineering University of California, Berkeley Office: 609 Davis Hall, University of California, Berkeley,
Postdoctoral Researcher Energy, Controls, and Applications Lab Department of Civil and Enviromental Engineering University of California, Berkeley Office: 609 Davis Hall, University of California, Berkeley,
Models everywhere: How a fully integrated model-based test environment can enable progress in the future
 Models everywhere: How a fully integrated model-based test environment can enable progress in the future M. Ben Gaid R. Lebas M. Fremovici G. Font G. Le Solliec A. Albrecht Contributions IFP Energies nouvelles
Models everywhere: How a fully integrated model-based test environment can enable progress in the future M. Ben Gaid R. Lebas M. Fremovici G. Font G. Le Solliec A. Albrecht Contributions IFP Energies nouvelles
Testing of Emissions- Relevant Driving Cycles on an Engine Testbed
 Testing of Emissions- Relevant Driving Cycles on an Engine Testbed Dr. Klaus Rothbart RDE as a Challenge for the Development TRAFFIC EXTREME CONDITIONS MOUNTAIN RANDOMNESS Driving style has a strong impact
Testing of Emissions- Relevant Driving Cycles on an Engine Testbed Dr. Klaus Rothbart RDE as a Challenge for the Development TRAFFIC EXTREME CONDITIONS MOUNTAIN RANDOMNESS Driving style has a strong impact
A Communication-centric Look at Automated Driving
 A Communication-centric Look at Automated Driving Onur Altintas Toyota ITC Fellow Toyota InfoTechnology Center, USA, Inc. November 5, 2016 IEEE 5G Summit Seattle Views expressed in this talk do not necessarily
A Communication-centric Look at Automated Driving Onur Altintas Toyota ITC Fellow Toyota InfoTechnology Center, USA, Inc. November 5, 2016 IEEE 5G Summit Seattle Views expressed in this talk do not necessarily
Convergence: Connected and Automated Mobility
 Convergence: Connected and Automated Mobility Peter Sweatman Principal, CAVita LLC, Anaheim CA AASHTO CTE Denver June 19, 2018 1 Agenda New technology in mobility: CV, AV and CAV The transformational dynamic
Convergence: Connected and Automated Mobility Peter Sweatman Principal, CAVita LLC, Anaheim CA AASHTO CTE Denver June 19, 2018 1 Agenda New technology in mobility: CV, AV and CAV The transformational dynamic
Simulated EV Dynamics: Safety & etvc
 Simulated EV Dynamics: Safety & etvc Dr. Stephen Jones et. al., AVL List GmbH stephen.jones@avl.com +43 316 787 4484 26.09.11 ARTEMIS ARTEMIS Pollux POLLUX Project Project Process Oriented electronic control
Simulated EV Dynamics: Safety & etvc Dr. Stephen Jones et. al., AVL List GmbH stephen.jones@avl.com +43 316 787 4484 26.09.11 ARTEMIS ARTEMIS Pollux POLLUX Project Project Process Oriented electronic control
CONNECTED AUTOMATION HOW ABOUT SAFETY?
 CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
Modelling LEZ and Demand Management measures in the City of York using Detailed Traffic-Emission Tools
 Institute for Transport Studies FACULTY OF ENVIRONMENT IAPSC Monday 11 th June 2012 Modelling LEZ and Demand Management measures in the City of York using Detailed Traffic-Emission Tools Dr James Tate
Institute for Transport Studies FACULTY OF ENVIRONMENT IAPSC Monday 11 th June 2012 Modelling LEZ and Demand Management measures in the City of York using Detailed Traffic-Emission Tools Dr James Tate
2B.3 - Free Piston Engine Hydraulic Pump
 2B.3 - Free Piston Engine Hydraulic Pump Georgia Institute of Technology Milwaukee School of Engineering North Carolina A&T State University Purdue University University of Illinois, Urbana-Champaign University
2B.3 - Free Piston Engine Hydraulic Pump Georgia Institute of Technology Milwaukee School of Engineering North Carolina A&T State University Purdue University University of Illinois, Urbana-Champaign University
RDE - GOING VIRTUAL. Felix Pfister & Rodolph Belleux (AVL) AVL List GmbH
 AVL List GmbH") RDE - GOING VIRTUAL Felix Pfister & Rodolph Belleux (AVL) AVL List GmbH CHALLENGE OF REAL DRIVING EMISSION Real Driving Emission will be mandatory as a part of the EURO 6c. Felix Pfister & Rodolph Belleux
RDE - GOING VIRTUAL Felix Pfister & Rodolph Belleux (AVL) AVL List GmbH CHALLENGE OF REAL DRIVING EMISSION Real Driving Emission will be mandatory as a part of the EURO 6c. Felix Pfister & Rodolph Belleux
Intelligent Energy Management System Simulator for PHEVs at a Municipal Parking Deck in a Smart Grid Environment
 Intelligent Energy Management System Simulator for PHEVs at a Municipal Parking Deck in a Smart Grid Environment Preetika Kulshrestha, Student Member, IEEE, Lei Wang, Student Member, IEEE, Mo-Yuen Chow,
Intelligent Energy Management System Simulator for PHEVs at a Municipal Parking Deck in a Smart Grid Environment Preetika Kulshrestha, Student Member, IEEE, Lei Wang, Student Member, IEEE, Mo-Yuen Chow,
VGI Communications Protocols. April 2018
 VGI Communications Protocols April 2018 Overview CPUC VGI Working Group Objective Assess how and whether the adoption of a communications protocolis necessary to enable Plug-In Electric Vehicle-Grid Integration
VGI Communications Protocols April 2018 Overview CPUC VGI Working Group Objective Assess how and whether the adoption of a communications protocolis necessary to enable Plug-In Electric Vehicle-Grid Integration
Real-Time Simulation of Predictive Control of DC Vehicular Microgrids. Asal Zabetian-Hosseini and Ali Mehrizi-Sani
 Real-Time Simulation of Predictive Control of DC Vehicular Microgrids Asal Zabetian-Hosseini and Ali Mehrizi-Sani 2 of 2 Outline Goal Fuel Cell and FC-PU Controller Design Simulation and Experimental Results
Real-Time Simulation of Predictive Control of DC Vehicular Microgrids Asal Zabetian-Hosseini and Ali Mehrizi-Sani 2 of 2 Outline Goal Fuel Cell and FC-PU Controller Design Simulation and Experimental Results
V2V Advancements in the last 12 months. CAMP and related activities
 V2V Advancements in the last 12 months CAMP and related activities Mike Shulman, Ford April 22, 2014 Connected Transportation Environment: Future Vision Mobility Safety Environment Global Gridlock 2 US:
V2V Advancements in the last 12 months CAMP and related activities Mike Shulman, Ford April 22, 2014 Connected Transportation Environment: Future Vision Mobility Safety Environment Global Gridlock 2 US:
Certification Procedures for Advanced Technology Heavy-Duty Vehicles. Evaluating Test Methods and Opportunities for Global Alignment
 Working Paper No. HDH-09-04 (9th HDH meeting, 21 to 23 March 2012) Certification Procedures for Advanced Technology Heavy-Duty Vehicles Evaluating Test Methods and Opportunities for Global Alignment Ben
Working Paper No. HDH-09-04 (9th HDH meeting, 21 to 23 March 2012) Certification Procedures for Advanced Technology Heavy-Duty Vehicles Evaluating Test Methods and Opportunities for Global Alignment Ben
MORSE: MOdel-based Real-time Systems Engineering. Reducing physical testing in the calibration of diagnostic and driveabilty features
 MORSE: MOdel-based Real-time Systems Engineering Reducing physical testing in the calibration of diagnostic and driveabilty features Mike Dempsey Claytex Future Powertrain Conference 2017 MORSE project
MORSE: MOdel-based Real-time Systems Engineering Reducing physical testing in the calibration of diagnostic and driveabilty features Mike Dempsey Claytex Future Powertrain Conference 2017 MORSE project
Towards Next Generation Public Transport Systems: Overview and some Preliminary results
 Francesco Viti, University of Luxembourg Marcin Seredynski, LIST & Volvo Bus Corporation Towards Next Generation Public Transport Systems: Overview and some Preliminary results June 16, 2017 ADAPT-IT Final
Francesco Viti, University of Luxembourg Marcin Seredynski, LIST & Volvo Bus Corporation Towards Next Generation Public Transport Systems: Overview and some Preliminary results June 16, 2017 ADAPT-IT Final
From academia to industry Commercializing research on propulsion and hydrodynamics. Øyvind Smogeli Chief Operating Officer
 1 From academia to industry Commercializing research on propulsion and hydrodynamics Øyvind Smogeli Chief Operating Officer 2 Motivation Demand for vessels to conduct allyear operation in harsh environment
1 From academia to industry Commercializing research on propulsion and hydrodynamics Øyvind Smogeli Chief Operating Officer 2 Motivation Demand for vessels to conduct allyear operation in harsh environment
Design and evaluate vehicle architectures to reach the best trade-off between performance, range and comfort. Unrestricted.
 Design and evaluate vehicle architectures to reach the best trade-off between performance, range and comfort. Unrestricted. Introduction Presenter Thomas Desbarats Business Development Simcenter System
Design and evaluate vehicle architectures to reach the best trade-off between performance, range and comfort. Unrestricted. Introduction Presenter Thomas Desbarats Business Development Simcenter System
AVL Virtual Testbed. Calibrate beyond the limits
 AVL Virtual Testbed Calibrate beyond the limits THE CHALLENGE Calibration Complexity The increasing vehicle diversity, combined with a multi tude of worldwide emissions regulations, the future introduction
AVL Virtual Testbed Calibrate beyond the limits THE CHALLENGE Calibration Complexity The increasing vehicle diversity, combined with a multi tude of worldwide emissions regulations, the future introduction
GRAND RENEWABLE ENERGY 2018
 グランド再生可能エネルギー 2018 AIST-FREA スペシャルセッション 国際会議 GRAND RENEWABLE ENERGY 2018 AIST-FREA Special Session 2018/6/20 パシフィコ横浜会議センターにて AIST-FREA Session, Room 501 International Workshop: Challenges to Renewable
グランド再生可能エネルギー 2018 AIST-FREA スペシャルセッション 国際会議 GRAND RENEWABLE ENERGY 2018 AIST-FREA Special Session 2018/6/20 パシフィコ横浜会議センターにて AIST-FREA Session, Room 501 International Workshop: Challenges to Renewable
Incorporating Drivability Metrics into Optimal Energy Management Strategies for Hybrid Vehicles. Daniel Opila
 Incorporating Drivability Metrics into Optimal Energy Management Strategies for Hybrid Vehicles Daniel Opila Collaborators Jeff Cook Jessy Grizzle Xiaoyong Wang Ryan McGee Brent Gillespie Deepak Aswani,
Incorporating Drivability Metrics into Optimal Energy Management Strategies for Hybrid Vehicles Daniel Opila Collaborators Jeff Cook Jessy Grizzle Xiaoyong Wang Ryan McGee Brent Gillespie Deepak Aswani,
Designing for Reliability and Robustness with MATLAB
 Designing for Reliability and Robustness with MATLAB Parameter Estimation and Tuning Sensitivity Analysis and Reliability Design of Experiments (DoE) and Calibration U. M. Sundar Senior Application Engineer
Designing for Reliability and Robustness with MATLAB Parameter Estimation and Tuning Sensitivity Analysis and Reliability Design of Experiments (DoE) and Calibration U. M. Sundar Senior Application Engineer
SCORE-F THE PROJECT. The French FOT Proposal. (Système COopératif Routier Expérimental Français) Presented by:
 Presented by:") SCORE-F (Système COopératif Routier Expérimental Français) The French FOT Proposal Presented by: Jean-Marc BLOSSEVILLE Stéphane AMARGER The clusters and their R&D projects are supported by: 1 THE PROJECT
SCORE-F (Système COopératif Routier Expérimental Français) The French FOT Proposal Presented by: Jean-Marc BLOSSEVILLE Stéphane AMARGER The clusters and their R&D projects are supported by: 1 THE PROJECT
IMPLEMENTATION OF A VEHICLE-IN-THE-LOOP DEVELOPMENT AND VALIDATION PLATFORM
 F2010-C-177 IMPLEMENTATION OF A VEHICLE-IN-THE-LOOP DEVELOPMENT AND VALIDATION PLATFORM 1 Albers, Albert *, 1 Düser, Tobias 1 IPEK Institute of Product Engineering at Karlsruhe Institute of Technology
F2010-C-177 IMPLEMENTATION OF A VEHICLE-IN-THE-LOOP DEVELOPMENT AND VALIDATION PLATFORM 1 Albers, Albert *, 1 Düser, Tobias 1 IPEK Institute of Product Engineering at Karlsruhe Institute of Technology
An Energy Efficiency Measurement Scheme for Electric Car Charging Pile Chun-bing JIANG
 2017 2 nd International Conference on Test, Measurement and Computational Method (TMCM 2017) ISBN: 978-1-60595-465-3 An Energy Efficiency Measurement Scheme for Electric Car Charging Pile Chun-bing JIANG
2017 2 nd International Conference on Test, Measurement and Computational Method (TMCM 2017) ISBN: 978-1-60595-465-3 An Energy Efficiency Measurement Scheme for Electric Car Charging Pile Chun-bing JIANG
Eco-Signal Operations Concept of Operations
 Eco-Signal Operations Concept of Operations Applications for the Environment: Real-Time Information Synthesis (AERIS) Adapted from the Eco-Signal Operations Concept of Operations Document AERIS Operational
Eco-Signal Operations Concept of Operations Applications for the Environment: Real-Time Information Synthesis (AERIS) Adapted from the Eco-Signal Operations Concept of Operations Document AERIS Operational
An Introduction to Automated Vehicles
 An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
Model Based Design: Balancing Embedded Controls Development and System Simulation
 All-Day Hybrid Power On the Job Model Based Design: Balancing Embedded Controls Development and System Simulation Presented by : Bill Mammen 1 Topics Odyne The Project System Model Summary 2 About Odyne
All-Day Hybrid Power On the Job Model Based Design: Balancing Embedded Controls Development and System Simulation Presented by : Bill Mammen 1 Topics Odyne The Project System Model Summary 2 About Odyne
Bicycle Hardware in the Loop Simulator for Braking Dynamics Assistance System
 Bicycle Hardware in the Loop Simulator for Braking Dynamics Assistance System IPG Apply & Innovate 2016 Conference Session: Off Highway Cornelius Bott, Martin Pfeiffer, Oliver Maier, Jürgen Wrede 21.09.2016
Bicycle Hardware in the Loop Simulator for Braking Dynamics Assistance System IPG Apply & Innovate 2016 Conference Session: Off Highway Cornelius Bott, Martin Pfeiffer, Oliver Maier, Jürgen Wrede 21.09.2016
Free Piston Engine Based Off-Road Vehicles
 Marquette University Milwaukee School of Engineering Purdue University University of California, Merced University of Illinois, Urbana-Champaign University of Minnesota Vanderbilt University Free Piston
Marquette University Milwaukee School of Engineering Purdue University University of California, Merced University of Illinois, Urbana-Champaign University of Minnesota Vanderbilt University Free Piston
Numerical Simulation Study of a Hybrid Road Vehicle Regarding Fuel Economy and Ambient Emission Delivery
 Numerical Simulation Study of a Hybrid Road Vehicle Regarding Fuel Economy and Ambient Emission Delivery Nicolae Stelian Lontis, Nicolae Liviu Mihon, Ion Vetres POLITEHNICA University Timisoara, Romania
Numerical Simulation Study of a Hybrid Road Vehicle Regarding Fuel Economy and Ambient Emission Delivery Nicolae Stelian Lontis, Nicolae Liviu Mihon, Ion Vetres POLITEHNICA University Timisoara, Romania
Steady-State Engine Modeling for Calibration: A Productivity and Quality Study
 Steady-State Engine Modeling for Calibration: A Productivity and Quality Study MathWorks Automotive Conference 2007 Hyatt Regency, Dearborn, MI Ulrike Schoop John Reeves Satoru Watanabe Ken Butts IAV GmbH
Steady-State Engine Modeling for Calibration: A Productivity and Quality Study MathWorks Automotive Conference 2007 Hyatt Regency, Dearborn, MI Ulrike Schoop John Reeves Satoru Watanabe Ken Butts IAV GmbH
Automotive Electronics/Connectivity/IoT/Smart City Track
 Automotive Electronics/Connectivity/IoT/Smart City Track The Automobile Electronics Sessions explore and investigate the ever-growing world of automobile electronics that affect virtually every aspect
Automotive Electronics/Connectivity/IoT/Smart City Track The Automobile Electronics Sessions explore and investigate the ever-growing world of automobile electronics that affect virtually every aspect
Determination of a turbocharged gasoline engine for hybrid powertrains. F. Kercher,
 Determination of a turbocharged gasoline engine for hybrid powertrains F. Kercher, 26.10.2015 Determination of a turbocharged gasoline engine for hybrid powertrains Agenda Introduction Hybrid Electric
Determination of a turbocharged gasoline engine for hybrid powertrains F. Kercher, 26.10.2015 Determination of a turbocharged gasoline engine for hybrid powertrains Agenda Introduction Hybrid Electric
Beyond ATC and ITS Standards. Edward Fok USDOT/FHWA - RESOURCE CENTER San Francisco
 Beyond ATC and ITS Standards Edward Fok USDOT/FHWA - RESOURCE CENTER San Francisco May, 2014 Signal Control is only the beginning Connected Vehicles Automated Vehicles Infrastructure Data: Fully Connected
Beyond ATC and ITS Standards Edward Fok USDOT/FHWA - RESOURCE CENTER San Francisco May, 2014 Signal Control is only the beginning Connected Vehicles Automated Vehicles Infrastructure Data: Fully Connected
THE WAY TO HIGHLY AUTOMATED DRIVING.
 December 15th, 2014. THE WAY TO HIGHLY AUTOMATED DRIVING. DR. WERNER HUBER, HEAD OF DRIVER ASSISTANCE AND PERCEPTION AT BMW GROUP RESEARCH AND TECHNOLOGY. AUTOMATION IS AN ESSENTIAL FEATURE OF THE INTELLIGENT
December 15th, 2014. THE WAY TO HIGHLY AUTOMATED DRIVING. DR. WERNER HUBER, HEAD OF DRIVER ASSISTANCE AND PERCEPTION AT BMW GROUP RESEARCH AND TECHNOLOGY. AUTOMATION IS AN ESSENTIAL FEATURE OF THE INTELLIGENT
EVs and PHEVs environmental and technological evaluation in actual use
 Énergies renouvelables Production éco-responsable Transports innovants Procédés éco-efficients Ressources durables EVs and PHEVs environmental and technological evaluation in actual use F. Badin, IFPEN,
Énergies renouvelables Production éco-responsable Transports innovants Procédés éco-efficients Ressources durables EVs and PHEVs environmental and technological evaluation in actual use F. Badin, IFPEN,
Highly dynamic control of a test bench for highspeed train pantographs
 PAGE 26 CUSTOMERS Highly dynamic control of a test bench for highspeed train pantographs Keeping Contact at 300 km/h Electric rail vehicles must never lose contact with the power supply, not even at the
PAGE 26 CUSTOMERS Highly dynamic control of a test bench for highspeed train pantographs Keeping Contact at 300 km/h Electric rail vehicles must never lose contact with the power supply, not even at the
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY
 ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY Bill Gouse Director, Federal Program Development Global Ground Vehicle Standards
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY Bill Gouse Director, Federal Program Development Global Ground Vehicle Standards
The Impact of Digital Twin on Transportation Infrastructure Monitoring & Maintenance
 The Impact of Digital Twin on Transportation Infrastructure Monitoring & Maintenance General Session. The Impact of IoT and CAV on Motorway Operations Salzburg, Sept. 7 th Sinelec SpA Gavio group Domenico
The Impact of Digital Twin on Transportation Infrastructure Monitoring & Maintenance General Session. The Impact of IoT and CAV on Motorway Operations Salzburg, Sept. 7 th Sinelec SpA Gavio group Domenico
Safe, comfortable and eco-friendly, Smart Connected Society
 Safe, comfortable and eco-friendly, Smart Connected Society Big data Traffic Management Centre Traffic Management for CASE Telematics Centre Energy Management for EV mrong-way detection Safety Support
Safe, comfortable and eco-friendly, Smart Connected Society Big data Traffic Management Centre Traffic Management for CASE Telematics Centre Energy Management for EV mrong-way detection Safety Support
DOE s Focus on Energy Efficient Mobility Systems
 DOE s Focus on Energy Efficient Mobility Systems David L. Anderson Energy Efficient Mobility Systems Program Vehicle Technologies Office Automated Vehicle Symposium San Francisco, California July 13, 2017
DOE s Focus on Energy Efficient Mobility Systems David L. Anderson Energy Efficient Mobility Systems Program Vehicle Technologies Office Automated Vehicle Symposium San Francisco, California July 13, 2017