Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications
|
|
|
- Amice Golden
- 6 years ago
- Views:
Transcription
1 Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications Jiaqi Ma Assistant Professor University of Cincinnati ITS Midwest Annual Meeting Columbus, Ohio, September 29, 2017
2 Outline Background & Objective HIL System Architecture Q-aware SIAD application Testing and Results Concluding Remarks
3 Background Increasing interests and investment in the research and development of innovative applications of connected/automated vehicles Most of CAV studies apply simulation for evaluation; however, model accuracy and simulation assumptions render limited validity of evaluation results Lack of field data exacerbates the problem of inaccuracy in modeling and simulation because there are no data available for model calibration purpose.
4 Background A few limited CAV field experiments Limited number of test vehicles available for experiments; Larger-scale field operational tests are extremely expensive A relative low cost and more accurate evaluation approach for CAV studies is necessary 4
5 Solutions Use emerging hardware-in-the-loop (HIL) testing tools is the best solution: Allow real test vehicles to interact with virtual vehicles from traffic simulation models Provide an evaluation environment that can replicate actual deployment conditions by using actual hardware and equipment Without incurring excessive costs at early stages of CAV development Categories 5





6 Hardware in the Loop Testing On-board Units Traffic Simulator Driving Simulator Other Hardware, e.g., Signal Controller, powertrain Roadside Units
7 High Level Project Objective Develop hardware-in-the-loop (HIL) testing platform for and set up HIL experimental system at TFHRC Conduct HIL testing to evaluate SIAD 7







8 Signalized Intersection Approach and Departure V2I Communications: SPaT and GID Messages Roadside Equipment Unit V2V Communications : Basic Safety Messages Traffic Signal Controller with SPaT Interface Vehicle Equipped with the Eco-Approach and Departure at Signalized Intersections Application (CACC capabilities optional) Traffic Signal Head

9 Goal Find a set of trajectories to optimize MOEs Travel time, fuel & emission, safety Trajectory smoothing


10 HIL System Setup Two challenges for the HIL testing of EAD: Synchronizing field and simulation traffic conditions on the fly Collecting real-time field traffic data from the testbed and real-time simulation data from a traffic simulator Figure 1 Platform for HIL Testing of EAD Application Figure 2 Data flow Chart for HIL Testing of EAD Application 10


11 FHWA Innovation Research Vehicles Proof of Concept Vehicles Research Fleet Communications - 5.9GHz DSRC, Cellular/LTE, Corrected GPS On-board Technology - Connected Vehicle Data Collection and Processing - Stock Radar and Ultra-Sonic Sensors - Front and rear-facing cameras
12 Vehicle System Data Flow


")










13 Connected Vehicle Highway Testbed (Intelligent Intersection) at TFHRC CCTV DSRC Signalized intersection with SPaT / MAP Vehicle Pedestrian & Bike Detection Fixed time or actuated traffic signal control with pedestrian / bike displays Dedicated Ethernet & Wi-Fi communications Cabinet space with power & comms, available for future research Cadillac SRX with OBU, GPS, CAN bus integration
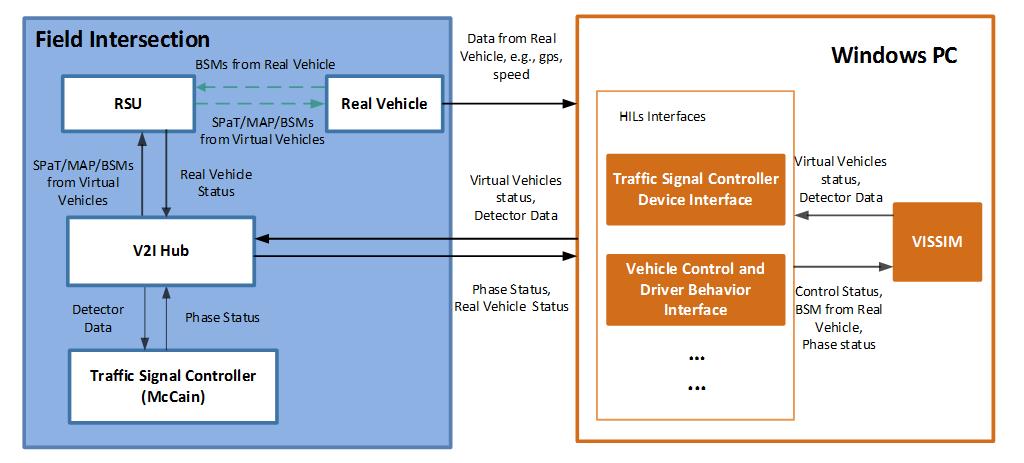
14 HIL Architecture
15 Q-aware SIAD Based on the existing SIAD algorithm, additional factors considered: Background traffic: Interactions between the CAV and other vehicles Multiple intersections Two intersections will be considered Different traffic signal control modes Actuated control and traffic coordination will be considered Different penetration rates of CV vehicles The impacts of penetration rates of CV vehicles on the SIAD algorithm will be evaluated 15
16 Q-SIAD Algorithm Y Q-SIAD Start (t=0) The front vehicle is very close? N Basic SIAD Algorithm Y Ta < Gcrm? Scenario 1 Speed Linear approaching & car following (gap regulation) t=t+1 N Vehicle passed the intersection? Y N Estimate Queue Length t=0? or Queue Length Change? Y Basic SIAD Algorithm N Tea< Gcrm <Ta? N (Gcrm <Tea & Tla<Gsn)? (Gcrm <Tea & Tla>Gsn)? Y Y Y Scenario 2 Scenario 3 Scenario 4 v h v c t m t n d 0 0 t arr where, t m = pi/(2m); t n = pi/(2n)+t m ; t arr = d 0 /v h. Time End (a) (b)
17 Experimental Scenarios Scenario 1: Single Intersection with fixed time traffic signal control Case 1-1: Base case without SIAD (Adaptive Cruise Control, ACC) Case 1-2: Q-SIAD algorithm by considering background traffic Scenario 2: Single Intersection with actuated traffic signal control Case 2-1: Base case without SIAD (ACC) Case 2-2: Q-SIAD algorithm by considering background traffic and features of actuated control 17
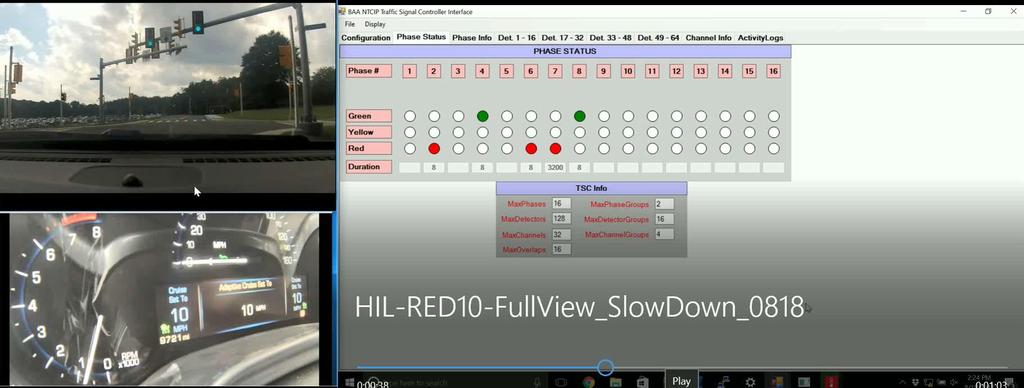
18 Testing
19 Slowdown scenario Results(1)
20 Speedup scenario Results(2)
21 Results(3) Start Scenario SIAD Scenario Baseline Basic SIAD Queue-aware SIAD 0% MP 100% MP R0 Slowdown % % % R5 Slowdown % % % R10 Cruise % % % R15 Cruise % % % R20 Cruise % % % G0 Cruise % % % G5 Speedup % % % G10 Stop % % % G25 Stop % % %
22 Concluding Remarks Offer a cost-effective approach for quick evaluation of CAV technologies Currently developing HIL for CACC; humanin-the-loop Help public agencies and private sectors to evaluate new CAV technologies
23 Q&A Contact Information Jiaqi Ma Department of Civil Engineering University of Cincinnati
TRAFFIC CONTROL. in a Connected Vehicle World
 TRAFFIC CONTROL in a Connected Vehicle World Preparing for the advent of Connected Vehicles and their impact on traffic management and signalized intersection control. Frank Provenzano, Director of Business
TRAFFIC CONTROL in a Connected Vehicle World Preparing for the advent of Connected Vehicles and their impact on traffic management and signalized intersection control. Frank Provenzano, Director of Business
Traffic Operations with Connected and Automated Vehicles
 Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY
 UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
Traffic Management through C-ITS and Automation: a perspective from the U.S.
 Traffic Management through C-ITS and Automation: a perspective from the U.S. Matthew Barth University of California-Riverside Yeager Families Professor Director, Center for Environmental Research and Technology
Traffic Management through C-ITS and Automation: a perspective from the U.S. Matthew Barth University of California-Riverside Yeager Families Professor Director, Center for Environmental Research and Technology
Eco-Signal Operations Concept of Operations
 Eco-Signal Operations Concept of Operations Applications for the Environment: Real-Time Information Synthesis (AERIS) Adapted from the Eco-Signal Operations Concept of Operations Document AERIS Operational
Eco-Signal Operations Concept of Operations Applications for the Environment: Real-Time Information Synthesis (AERIS) Adapted from the Eco-Signal Operations Concept of Operations Document AERIS Operational
Hardware-In-the-Loop (HIL) Testbed for Evaluating Connected Vehicle Applications
 Testbed for Evaluating Connected Vehicle Applications") Hardware-In-the-Loop (HIL) Testbed for Evaluating Connected Vehicle Applications Department of Mechanical Engineering University of Minnesota Project Members : Mohd Azrin Mohd Zulkefli Pratik Mukherjee
Hardware-In-the-Loop (HIL) Testbed for Evaluating Connected Vehicle Applications Department of Mechanical Engineering University of Minnesota Project Members : Mohd Azrin Mohd Zulkefli Pratik Mukherjee
G4 Apps. Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013
 Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013 Reducing costs, emissions. Improving mobility, efficiency. Safe Broadband Wireless Operations Fusion: Vehicles-Agencies Technologies,
Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013 Reducing costs, emissions. Improving mobility, efficiency. Safe Broadband Wireless Operations Fusion: Vehicles-Agencies Technologies,
Beyond ATC and ITS Standards. Edward Fok USDOT/FHWA - RESOURCE CENTER San Francisco
 Beyond ATC and ITS Standards Edward Fok USDOT/FHWA - RESOURCE CENTER San Francisco May, 2014 Signal Control is only the beginning Connected Vehicles Automated Vehicles Infrastructure Data: Fully Connected
Beyond ATC and ITS Standards Edward Fok USDOT/FHWA - RESOURCE CENTER San Francisco May, 2014 Signal Control is only the beginning Connected Vehicles Automated Vehicles Infrastructure Data: Fully Connected
The Role of Vehicle Automation and Intelligent Transportation Systems in Sustainable Transportation
 The Role of Vehicle Automation and Intelligent Transportation Systems in Sustainable Transportation Barth Memorial Symposium May 15, 2015 Matthew Barth Yeager Families Chair Director, Center for Environmental
The Role of Vehicle Automation and Intelligent Transportation Systems in Sustainable Transportation Barth Memorial Symposium May 15, 2015 Matthew Barth Yeager Families Chair Director, Center for Environmental
Test & Validation Challenges Facing ADAS and CAV
 Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
Smart Cities Around the Country
 Smart Cities Around the Country Robert James Date 11/09/2017 Contact rojames@hntb.com (732) 689-1989 2 Automated Intersection https://youtu.be/4smjp8tdwtu Smart Cities A Smart City utilizes innovative
Smart Cities Around the Country Robert James Date 11/09/2017 Contact rojames@hntb.com (732) 689-1989 2 Automated Intersection https://youtu.be/4smjp8tdwtu Smart Cities A Smart City utilizes innovative
Stan Caldwell Executive Director Traffic21 Institute Carnegie Mellon University
 Stan Caldwell Executive Director Traffic21 Institute Carnegie Mellon University Connected Vehicles Dedicated Short Range Communication (DSRC) Safer cars. Safer Drivers. Safer roads. Thank You! Tim Johnson
Stan Caldwell Executive Director Traffic21 Institute Carnegie Mellon University Connected Vehicles Dedicated Short Range Communication (DSRC) Safer cars. Safer Drivers. Safer roads. Thank You! Tim Johnson
Advanced Traffic Management on Arterial Corridors with Connected and Automated Vehicles
 Advanced Traffic Management on Arterial Corridors with Connected and Automated Vehicles Outline: November 18, 2015 Matthew Barth Yeager Families Chair Director, Center for Environmental Research and Technology
Advanced Traffic Management on Arterial Corridors with Connected and Automated Vehicles Outline: November 18, 2015 Matthew Barth Yeager Families Chair Director, Center for Environmental Research and Technology
INFRASTRUCTURE SYSTEMS FOR INTERSECTION COLLISION AVOIDANCE
 INFRASTRUCTURE SYSTEMS FOR INTERSECTION COLLISION AVOIDANCE Robert A. Ferlis Office of Operations Research and Development Federal Highway Administration McLean, Virginia USA E-mail: robert.ferlis@fhwa.dot.gov
INFRASTRUCTURE SYSTEMS FOR INTERSECTION COLLISION AVOIDANCE Robert A. Ferlis Office of Operations Research and Development Federal Highway Administration McLean, Virginia USA E-mail: robert.ferlis@fhwa.dot.gov
Energy and Automation Workshop E1: Impacts of Connectivity and Automation on Vehicle Operations
 Energy and Automation Workshop E1: Impacts of Connectivity and Automation on Vehicle Operations Ben Saltsman Engineering Manager Intelligent Truck, Vehicle Technology & Innovation April 23, 2014 Comprehensive
Energy and Automation Workshop E1: Impacts of Connectivity and Automation on Vehicle Operations Ben Saltsman Engineering Manager Intelligent Truck, Vehicle Technology & Innovation April 23, 2014 Comprehensive
Connected and Automated Vehicle Activities in the United States
 U.S. Department of Transportation Connected and Automated Vehicle Activities in the United States SIP-adus Workshop on Connected and Automated Driving Systems Kevin Dopart Automation Program Manager, U.S.
U.S. Department of Transportation Connected and Automated Vehicle Activities in the United States SIP-adus Workshop on Connected and Automated Driving Systems Kevin Dopart Automation Program Manager, U.S.
SIMULATING AUTONOMOUS VEHICLES ON OUR TRANSPORT NETWORKS
 SIMULATING AUTONOMOUS VEHICLES ON OUR TRANSPORT NETWORKS www.ptvgroup.com Alastair Evanson, Solution Director PTV Vissim TOMORROW S CONNECTED & BUSINESS AUTONOMOUS MODEL: VEHICLES SIGNIFICANT SHIFT TO
SIMULATING AUTONOMOUS VEHICLES ON OUR TRANSPORT NETWORKS www.ptvgroup.com Alastair Evanson, Solution Director PTV Vissim TOMORROW S CONNECTED & BUSINESS AUTONOMOUS MODEL: VEHICLES SIGNIFICANT SHIFT TO
Convergence: Connected and Automated Mobility
 Convergence: Connected and Automated Mobility Peter Sweatman Principal, CAVita LLC, Anaheim CA AASHTO CTE Denver June 19, 2018 1 Agenda New technology in mobility: CV, AV and CAV The transformational dynamic
Convergence: Connected and Automated Mobility Peter Sweatman Principal, CAVita LLC, Anaheim CA AASHTO CTE Denver June 19, 2018 1 Agenda New technology in mobility: CV, AV and CAV The transformational dynamic
DOE s Focus on Energy Efficient Mobility Systems
 DOE s Focus on Energy Efficient Mobility Systems David L. Anderson Energy Efficient Mobility Systems Program Vehicle Technologies Office Automated Vehicle Symposium San Francisco, California July 13, 2017
DOE s Focus on Energy Efficient Mobility Systems David L. Anderson Energy Efficient Mobility Systems Program Vehicle Technologies Office Automated Vehicle Symposium San Francisco, California July 13, 2017
NHTSA Update: Connected Vehicles V2V Communications for Safety
 NHTSA Update: Connected Vehicles V2V Communications for Safety Alrik L. Svenson Transportation Research Board Meeting Washington, D.C. January 12, 2015 This is US Government work and may be copied without
NHTSA Update: Connected Vehicles V2V Communications for Safety Alrik L. Svenson Transportation Research Board Meeting Washington, D.C. January 12, 2015 This is US Government work and may be copied without
Connected and Automated Vehicles (CAVs): Challenges and Opportunities for Traffic Operations
: Challenges and Opportunities for Traffic Operations") NTUA Seminar Connected and Automated Vehicles (CAVs): Challenges and Opportunities for Traffic Operations Toronto, 1959 Los Angeles, 2009 Alexander Skabardonis NTUA 1977, University of California, Berkeley
NTUA Seminar Connected and Automated Vehicles (CAVs): Challenges and Opportunities for Traffic Operations Toronto, 1959 Los Angeles, 2009 Alexander Skabardonis NTUA 1977, University of California, Berkeley
Associated Pennsylvania Constructors 2019 Construction Innovation Conference. April 4, 2019
 Associated Pennsylvania Constructors 2019 Construction Innovation Conference April 4, 2019 1 2 3 CORRIDOR PROJECT EVOLUTION 2014-15 2016 2017 Collaborative Group Formed to Explore Development Issues along
Associated Pennsylvania Constructors 2019 Construction Innovation Conference April 4, 2019 1 2 3 CORRIDOR PROJECT EVOLUTION 2014-15 2016 2017 Collaborative Group Formed to Explore Development Issues along
Cooperative brake technology
 Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
Cooperative Autonomous Driving and Interaction with Vulnerable Road Users
 9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications
 Systems: Architectures, Controls, and Applications") A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications Ziran Wang (presenter), Guoyuan Wu, and Matthew J. Barth University of California, Riverside Nov.
A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications Ziran Wang (presenter), Guoyuan Wu, and Matthew J. Barth University of California, Riverside Nov.
Low Carbon Traffic Integrating Siemens Traffic Controls and the Connected Vehicle
 Low Carbon Traffic Integrating Siemens Traffic Controls and the Connected Vehicle CENEX LCV, September 2016 Unrestricted Siemens plc 2016 siemens.co.uk/traffic Transport is fundamental to economic growth
Low Carbon Traffic Integrating Siemens Traffic Controls and the Connected Vehicle CENEX LCV, September 2016 Unrestricted Siemens plc 2016 siemens.co.uk/traffic Transport is fundamental to economic growth
Connected Vehicles. V2X technology.
 EN Kapsch TrafficCom Connected Vehicles. V2X technology. Cooperative Intelligent Transportation Systems (C-ITS) are based on the communication between vehicles and infrastructure (V2I, or vehicle to infrastructure
EN Kapsch TrafficCom Connected Vehicles. V2X technology. Cooperative Intelligent Transportation Systems (C-ITS) are based on the communication between vehicles and infrastructure (V2I, or vehicle to infrastructure
State and Local Implications for Connected and Automated Vehicles. James Pol, PE, PMP. AASHTO SCOHTS Meeting
 State and Local Implications for Connected and Automated Vehicles AASHTO SCOHTS Meeting James Pol, PE, PMP Technical Director FHWA Office of Safety R&D 0 Agenda USDOT ITS Strategic Plan 2015-2019 Connected
State and Local Implications for Connected and Automated Vehicles AASHTO SCOHTS Meeting James Pol, PE, PMP Technical Director FHWA Office of Safety R&D 0 Agenda USDOT ITS Strategic Plan 2015-2019 Connected
Intelligent Vehicle Systems
 Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
Automated driving in urban environments: technical challenges, open problems and barriers. Fawzi Nashashibi
 Automated driving in urban environments: technical challenges, open problems and barriers Fawzi Nashashibi 6th Workshop on Planning, Perception and Navigation for Intelligent Vehicles SEPTEMBER 14, 2014
Automated driving in urban environments: technical challenges, open problems and barriers Fawzi Nashashibi 6th Workshop on Planning, Perception and Navigation for Intelligent Vehicles SEPTEMBER 14, 2014
An Introduction to Automated Vehicles
 An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017
 IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017 AUTOMATED DRIVING OPENS NEW OPPORTUNITIES FOR CUSTOMERS AND COMMUNITY. MORE SAFETY MORE COMFORT MORE FLEXIBILITY MORE
IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017 AUTOMATED DRIVING OPENS NEW OPPORTUNITIES FOR CUSTOMERS AND COMMUNITY. MORE SAFETY MORE COMFORT MORE FLEXIBILITY MORE
Energy ITS: What We Learned and What We should Learn
 Energy ITS: What We Learned and What We should Learn July 25, 2012 TRB Road Vehicle Automation Workshop Sadayuki Tsugawa, Dr. Eng. NEDO Energy ITS Project Leader Professor, Department of Information Engineering
Energy ITS: What We Learned and What We should Learn July 25, 2012 TRB Road Vehicle Automation Workshop Sadayuki Tsugawa, Dr. Eng. NEDO Energy ITS Project Leader Professor, Department of Information Engineering
Commercial Vehicle Infrastructure Integration (CVII) Program
 Program") Office of Modal Safety & Security Services New York State Department of Transportation Commercial Vehicle Infrastructure Integration (CVII) Program ITS New York Annual Meeting June 9 th -10 th, 2011 What
Office of Modal Safety & Security Services New York State Department of Transportation Commercial Vehicle Infrastructure Integration (CVII) Program ITS New York Annual Meeting June 9 th -10 th, 2011 What
Design and Calibration of the Jaguar XK Adaptive Cruise Control System. Tim Jagger MathWorks International Automotive Conference 2006
 Design and Calibration of the Jaguar XK Adaptive Cruise Control System Tim Jagger MathWorks International Automotive Conference 26 JAGUAR XK Page 3 ADAPTIVE CRUISE CONTROL(ACC) MODEL BASED CALIBRATION
Design and Calibration of the Jaguar XK Adaptive Cruise Control System Tim Jagger MathWorks International Automotive Conference 26 JAGUAR XK Page 3 ADAPTIVE CRUISE CONTROL(ACC) MODEL BASED CALIBRATION
Leading the way to seamless mobility November th, 2017 Tampa, Florida
 Leading the way to seamless mobility November 14-15 th, 2017 Tampa, Florida usa.siemens.com/intelligenttraffic Urban mobility challenges A view on safety and congestion Trend Challenges + 2 Cities grow
Leading the way to seamless mobility November 14-15 th, 2017 Tampa, Florida usa.siemens.com/intelligenttraffic Urban mobility challenges A view on safety and congestion Trend Challenges + 2 Cities grow
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
Roy Hulli, P.Eng. and. Fernando Chua. Intelligent Transportation Systems Ministry of Transportation Ontario
 Roy Hulli, P.Eng and Fernando Chua Intelligent Transportation Systems Ministry of Transportation Ontario Smart Cities Data Connectivity Disruption Context of Change Automated Vehicles Monitoring by sensors
Roy Hulli, P.Eng and Fernando Chua Intelligent Transportation Systems Ministry of Transportation Ontario Smart Cities Data Connectivity Disruption Context of Change Automated Vehicles Monitoring by sensors
CONNECTED AUTOMATION HOW ABOUT SAFETY?
 CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
Connected Vehicles for Safety
 Connected Vehicles for Safety Shelley Row Director Intelligent Transportation Systems Joint Program Office Research and Innovative Technology Administration, USDOT The Problem Safety 32,788 highway deaths
Connected Vehicles for Safety Shelley Row Director Intelligent Transportation Systems Joint Program Office Research and Innovative Technology Administration, USDOT The Problem Safety 32,788 highway deaths
C-ITS in Taiwan. Michael Li
 C-ITS in Taiwan Michael Li (hhli@itri.org.tw) Deputy Division Director Division for Telematics and Vehicular Control System Information and Communication Lab. (ICL) Industrial Technology Research Institute
C-ITS in Taiwan Michael Li (hhli@itri.org.tw) Deputy Division Director Division for Telematics and Vehicular Control System Information and Communication Lab. (ICL) Industrial Technology Research Institute
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY
 ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY Bill Gouse Director, Federal Program Development Global Ground Vehicle Standards
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY Bill Gouse Director, Federal Program Development Global Ground Vehicle Standards
Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts
 Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts Office of Analysis, Research, and Technology Federal Motor Carrier Safety Administration Managing Fatigue Conference Mar
Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts Office of Analysis, Research, and Technology Federal Motor Carrier Safety Administration Managing Fatigue Conference Mar
APCO International. Emerging Technology Forum
 APCO International Emerging Technology Forum Emerging Vehicle to Vehicle, Vehicle to Infrastructure Communications Cars talking to each other and talking to the supporting highway infrastructure The Regulatory
APCO International Emerging Technology Forum Emerging Vehicle to Vehicle, Vehicle to Infrastructure Communications Cars talking to each other and talking to the supporting highway infrastructure The Regulatory
Reducing Greenhouse Gas Emissions through Intelligent Transportation System Solutions. June 1, 2016
 Reducing Greenhouse Gas Emissions through Intelligent Transportation System Solutions June 1, 2016 NCST UNIVERSITY PARTNERS TRANSFORMING THE TRANSPORTATION SYSTEM RESEARCH Producing state of knowledge
Reducing Greenhouse Gas Emissions through Intelligent Transportation System Solutions June 1, 2016 NCST UNIVERSITY PARTNERS TRANSFORMING THE TRANSPORTATION SYSTEM RESEARCH Producing state of knowledge
PERFORMANCE BENEFITS OF CONNECTED VEHICLES FOR IMPLEMENTING SPEED HARMONIZATION
 PERFORMANCE BENEFITS OF CONNECTED VEHICLES FOR IMPLEMENTING SPEED HARMONIZATION Richard Dowling, Brandon Nevers, Anxi Jia, Alexander Skabardonis Kittelson & Associates Cory Krause, Meenakshy Vasudevan
PERFORMANCE BENEFITS OF CONNECTED VEHICLES FOR IMPLEMENTING SPEED HARMONIZATION Richard Dowling, Brandon Nevers, Anxi Jia, Alexander Skabardonis Kittelson & Associates Cory Krause, Meenakshy Vasudevan
Dr. Mohamed Abdel-Aty, P.E. Connected-Autonomous Vehicles (CAV): Background and Opportunities. Trustee Chair
: Background and Opportunities. Trustee Chair") Connected-Autonomous Vehicles (CAV): Background and Opportunities Dr. Mohamed Abdel-Aty, P.E. Trustee Chair Pegasus Professor Chair, Dept. of Civil, Environmental & Construction Engineering University
Connected-Autonomous Vehicles (CAV): Background and Opportunities Dr. Mohamed Abdel-Aty, P.E. Trustee Chair Pegasus Professor Chair, Dept. of Civil, Environmental & Construction Engineering University
Modeling Driver Behavior in a Connected Environment Integration of Microscopic Traffic Simulation and Telecommunication Systems.
 Modeling Driver Behavior in a Connected Environment Integration of Microscopic Traffic Simulation and Telecommunication Systems Alireza Talebpour Information Level Connectivity in the Modern Age Sensor
Modeling Driver Behavior in a Connected Environment Integration of Microscopic Traffic Simulation and Telecommunication Systems Alireza Talebpour Information Level Connectivity in the Modern Age Sensor
2007 ITS World Congress, London, U.K. SS 59 Communications for Vehicle Safety Vehicle Safety Communications in the US
 2007 ITS World Congress, London, U.K. SS 59 Communications for Vehicle Safety Vehicle Safety Communications in the US Dr. Wieland Holfelder, VP&CTO DaimlerChrysler Research and Technology North America,
2007 ITS World Congress, London, U.K. SS 59 Communications for Vehicle Safety Vehicle Safety Communications in the US Dr. Wieland Holfelder, VP&CTO DaimlerChrysler Research and Technology North America,
Govind Vadakpat, Research Transportation Specialist Office of Operations R&D, USDOT. U.S. Department of Transportation
 Govind Vadakpat, Research Transportation Specialist Office of Operations R&D, USDOT 1 OVERVIEW Connected Vehicles Pilot Deployment Program Overview Overview of CV Pilot Program Award Sites Wyoming DOT
Govind Vadakpat, Research Transportation Specialist Office of Operations R&D, USDOT 1 OVERVIEW Connected Vehicles Pilot Deployment Program Overview Overview of CV Pilot Program Award Sites Wyoming DOT
H2020 (ART ) CARTRE SCOUT
 CARTRE SCOUT") H2020 (ART-06-2016) CARTRE SCOUT Objective Advance deployment of connected and automated driving across Europe October 2016 September 2018 Coordination & Support Action 2 EU-funded Projects 36 consortium
H2020 (ART-06-2016) CARTRE SCOUT Objective Advance deployment of connected and automated driving across Europe October 2016 September 2018 Coordination & Support Action 2 EU-funded Projects 36 consortium
DYNA4 Open Simulation Framework with Flexible Support for Your Work Processes and Modular Simulation Model Library
 Open Simulation Framework with Flexible Support for Your Work Processes and Modular Simulation Model Library DYNA4 Concept DYNA4 is an open and modular simulation framework for efficient working with simulation
Open Simulation Framework with Flexible Support for Your Work Processes and Modular Simulation Model Library DYNA4 Concept DYNA4 is an open and modular simulation framework for efficient working with simulation
dspace GmbH Rathenaustr Paderborn Germany dspace Technology Conference Workshop #2
 dspace Engineering - Mechatronic Test Benches Matthias Deter Group Manager Engineering E-Drive Applications dspace Technology Conference 2017 Workshop #2 dspace GmbH Rathenaustr. 26 33102 Paderborn Germany
dspace Engineering - Mechatronic Test Benches Matthias Deter Group Manager Engineering E-Drive Applications dspace Technology Conference 2017 Workshop #2 dspace GmbH Rathenaustr. 26 33102 Paderborn Germany
AVL Virtual Testbed. Calibrate beyond the limits
 AVL Virtual Testbed Calibrate beyond the limits THE CHALLENGE Calibration Complexity The increasing vehicle diversity, combined with a multi tude of worldwide emissions regulations, the future introduction
AVL Virtual Testbed Calibrate beyond the limits THE CHALLENGE Calibration Complexity The increasing vehicle diversity, combined with a multi tude of worldwide emissions regulations, the future introduction
The Evolution of Transportation Technology in an Increasingly Smart Society. Presented by: Matthew J. Schiemer, PE September 12, 2017
 The Evolution of Transportation Technology in an Increasingly Smart Society Presented by: Matthew J. Schiemer, PE September 12, 2017 Traffic Signal Systems 1914 to Present First electric traffic signal
The Evolution of Transportation Technology in an Increasingly Smart Society Presented by: Matthew J. Schiemer, PE September 12, 2017 Traffic Signal Systems 1914 to Present First electric traffic signal
Future Vehicle Safety: Connected, Cooperative, or Autonomous? Christopher Poe, Ph.D., P.E. Assistant Agency Director
 Future Vehicle Safety: Connected, Cooperative, or Autonomous? Christopher Poe, Ph.D., P.E. Assistant Agency Director TexITE Meeting August 30, 2012 Presentation Outline Connected Vehicle Program Connected
Future Vehicle Safety: Connected, Cooperative, or Autonomous? Christopher Poe, Ph.D., P.E. Assistant Agency Director TexITE Meeting August 30, 2012 Presentation Outline Connected Vehicle Program Connected
A Roadmap for Connected Vehicle Deployment in California (Draft) Benjamin McKeever, P.E. December 15, 2016
 Benjamin McKeever, P.E. December 15, 2016") A Roadmap for Connected Vehicle Deployment in California (Draft) Benjamin McKeever, P.E. December 15, 2016 The following roadmap has been developed for Caltrans to help guide the actions needed to ensure
A Roadmap for Connected Vehicle Deployment in California (Draft) Benjamin McKeever, P.E. December 15, 2016 The following roadmap has been developed for Caltrans to help guide the actions needed to ensure
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS
 EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
Self-Driving Vehicles in the Park
 Self-Driving Vehicles in the Park Bryant Walker Smith Center for Internet and Society Center for Automotive Research cyberlaw.stanford.edu/about/people/bryant-walker-smith 1 A robot by any other name Self-driving
Self-Driving Vehicles in the Park Bryant Walker Smith Center for Internet and Society Center for Automotive Research cyberlaw.stanford.edu/about/people/bryant-walker-smith 1 A robot by any other name Self-driving
A Communication-centric Look at Automated Driving
 A Communication-centric Look at Automated Driving Onur Altintas Toyota ITC Fellow Toyota InfoTechnology Center, USA, Inc. November 5, 2016 IEEE 5G Summit Seattle Views expressed in this talk do not necessarily
A Communication-centric Look at Automated Driving Onur Altintas Toyota ITC Fellow Toyota InfoTechnology Center, USA, Inc. November 5, 2016 IEEE 5G Summit Seattle Views expressed in this talk do not necessarily
Intelligent Transportation Systems. Secure solutions for smart roads and connected highways. Brochure Intelligent Transportation Systems
 Intelligent Transportation Systems Secure solutions for smart roads and connected highways Secure solutions for smart roads and connected highways Today s technology is delivering new opportunities for
Intelligent Transportation Systems Secure solutions for smart roads and connected highways Secure solutions for smart roads and connected highways Today s technology is delivering new opportunities for
C A. Right on track to enhanced driving safety. CAPS - Combined Active & Passive Safety. Robert Bosch GmbH CC/PJ-CAPS: Jochen Pfäffle
 Right on track to enhanced driving safety C A SP Robert Bosch GmbH CC/PJ-CAPS: Jochen Pfäffle 1 Outline CAPS motivation & content of activity Accident analysis & development methodology Market, drivers,
Right on track to enhanced driving safety C A SP Robert Bosch GmbH CC/PJ-CAPS: Jochen Pfäffle 1 Outline CAPS motivation & content of activity Accident analysis & development methodology Market, drivers,
Platooning using p in SARTRE project Safe Road Train for the Environment
 Ricardo plc 2009 Platooning using 802.11p in SARTRE project Safe Road Train for the Environment Erik Nordin, Project Manager, Volvo GTT (Volvo Technology, VTEC) Dept: Vehicle Technology and Safety 2 Road
Ricardo plc 2009 Platooning using 802.11p in SARTRE project Safe Road Train for the Environment Erik Nordin, Project Manager, Volvo GTT (Volvo Technology, VTEC) Dept: Vehicle Technology and Safety 2 Road
Connected vehicles on European roads: benefits for safety and traffic management
 Connected vehicles on European roads: benefits for safety and traffic management Luciano Altomare Centro Ricerche Fiat Workshop Klimamobility 2017 April, 20 th 2017 Index V2X evolution in Europe: regulatory
Connected vehicles on European roads: benefits for safety and traffic management Luciano Altomare Centro Ricerche Fiat Workshop Klimamobility 2017 April, 20 th 2017 Index V2X evolution in Europe: regulatory
European Conference on Nanoelectronics and Embedded Systems for Electric Mobility. Functional Validation of Battery Management Systems
 European Conference on Nanoelectronics and Embedded Systems for Electric Mobility emobility emotion 25-26 th September 2013, Toulouse, France Functional Validation of Battery Management Systems Christian
European Conference on Nanoelectronics and Embedded Systems for Electric Mobility emobility emotion 25-26 th September 2013, Toulouse, France Functional Validation of Battery Management Systems Christian
Michigan C/AV Test Facilities Transition from Research to Reality
 Michigan C/AV Test Facilities Transition from Research to Reality ITS Georgia Annual Meeting October 9, 2017 USDOT Connected Vehicle Program Standards developm ent Application concepts Securit y syst em
Michigan C/AV Test Facilities Transition from Research to Reality ITS Georgia Annual Meeting October 9, 2017 USDOT Connected Vehicle Program Standards developm ent Application concepts Securit y syst em
Partial Automation for Truck Platooning
 Partial Automation for Truck Platooning Observations and Lessons Learned to Date from California's Experience with Truck Platooning Matt Hanson 2017 ITS CA Conference September 18, 2017 Burlingame, CA
Partial Automation for Truck Platooning Observations and Lessons Learned to Date from California's Experience with Truck Platooning Matt Hanson 2017 ITS CA Conference September 18, 2017 Burlingame, CA
Safe, comfortable and eco-friendly, Smart Connected Society
 Safe, comfortable and eco-friendly, Smart Connected Society Big data Traffic Management Centre Traffic Management for CASE Telematics Centre Energy Management for EV mrong-way detection Safety Support
Safe, comfortable and eco-friendly, Smart Connected Society Big data Traffic Management Centre Traffic Management for CASE Telematics Centre Energy Management for EV mrong-way detection Safety Support
Dr. Chris Borroni-Bird, VP, Strategic Development, Qualcomm Technologies Incorporated. Enabling Connected and Electric Vehicles
 Dr. Chris Borroni-Bird, VP, Strategic Development, Qualcomm Technologies Incorporated Enabling Connected and Electric Vehicles 1 2 3 4 Introduction DSRC WEVC Summary Agenda 2 Multiple technologies intersect
Dr. Chris Borroni-Bird, VP, Strategic Development, Qualcomm Technologies Incorporated Enabling Connected and Electric Vehicles 1 2 3 4 Introduction DSRC WEVC Summary Agenda 2 Multiple technologies intersect
CONNECTED AND AUTONOMOUS VEHICLES TYLER SVITAK CONNECTED AND AUTONOMOUS TECH PROGRAM MANAGER CDOT INTELLIGENT TRANPSORTATION SYSTEMS (ITS)
") CONNECTED AND AUTONOMOUS VEHICLES TYLER SVITAK CONNECTED AND AUTONOMOUS TECH PROGRAM MANAGER CDOT INTELLIGENT TRANPSORTATION SYSTEMS (ITS) CHALLENGES Safety Congestion Air Quality Cost 700 600 500 400
CONNECTED AND AUTONOMOUS VEHICLES TYLER SVITAK CONNECTED AND AUTONOMOUS TECH PROGRAM MANAGER CDOT INTELLIGENT TRANPSORTATION SYSTEMS (ITS) CHALLENGES Safety Congestion Air Quality Cost 700 600 500 400
V2V Advancements in the last 12 months. CAMP and related activities
 V2V Advancements in the last 12 months CAMP and related activities Mike Shulman, Ford April 22, 2014 Connected Transportation Environment: Future Vision Mobility Safety Environment Global Gridlock 2 US:
V2V Advancements in the last 12 months CAMP and related activities Mike Shulman, Ford April 22, 2014 Connected Transportation Environment: Future Vision Mobility Safety Environment Global Gridlock 2 US:
The connected vehicle is the better vehicle!
 AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
STANDARDS IN A RAPIDLY CHANGING MOBILITY LANDSCAPE
 SAE INTERNATIONAL STANDARDS IN A RAPIDLY CHANGING MOBILITY LANDSCAPE ITU WORKSHOP ON VEHICLE COMMUNICATIONS AND AUTOMATED DRIVING Beijing, China 28-29 July, 2015 SAE International Gary Schkade SAE portfolio.
SAE INTERNATIONAL STANDARDS IN A RAPIDLY CHANGING MOBILITY LANDSCAPE ITU WORKSHOP ON VEHICLE COMMUNICATIONS AND AUTOMATED DRIVING Beijing, China 28-29 July, 2015 SAE International Gary Schkade SAE portfolio.
Impact of Connection and Automation on Electrified Vehicle Energy Consumption
 Impact of Connection and Automation on Electrified Vehicle Energy Consumption SAE 215 Vehicle Electrification and Connected Vehicle Technology Forum December 4, 215 Aymeric Rousseau, Pierre Michel, Dominik
Impact of Connection and Automation on Electrified Vehicle Energy Consumption SAE 215 Vehicle Electrification and Connected Vehicle Technology Forum December 4, 215 Aymeric Rousseau, Pierre Michel, Dominik
SIP-adus: Japanese Automated Driving Project
 ITS World Congress 2017 Montreal SIS55: Benefit of IoT and Big Data for Automated driving and User Trust Challenge SIP-adus: Japanese Automated Driving Project Hajime Amano President, ITS Japan Chairman,
ITS World Congress 2017 Montreal SIS55: Benefit of IoT and Big Data for Automated driving and User Trust Challenge SIP-adus: Japanese Automated Driving Project Hajime Amano President, ITS Japan Chairman,
Cooperative ITS Corridor Joint Deployment. Konstantin Sauer BMVI
 Cooperative ITS Corridor Joint Deployment Konstantin Sauer BMVI The official start On 10 June 2013, the Ministers of Transport of the Netherlands, Germany and Austria signed the Memorandum of Understanding
Cooperative ITS Corridor Joint Deployment Konstantin Sauer BMVI The official start On 10 June 2013, the Ministers of Transport of the Netherlands, Germany and Austria signed the Memorandum of Understanding
Integrated ADAS HIL System with the Combination of CarMaker and Various ADAS Test Benches. Jinjong Lee, Konrad Yu-Mi Song, Hyundai-Autron
 Integrated ADAS HIL System with the Combination of CarMaker and Various ADAS Test Benches Jinjong Lee, Konrad Yu-Mi Song, Hyundai-Autron 1 Agenda Part1. ADAS Sensor Fusion HILS Trend 1.1 The trend of ADAS
Integrated ADAS HIL System with the Combination of CarMaker and Various ADAS Test Benches Jinjong Lee, Konrad Yu-Mi Song, Hyundai-Autron 1 Agenda Part1. ADAS Sensor Fusion HILS Trend 1.1 The trend of ADAS
2015 The MathWorks, Inc. 1
 2015 The MathWorks, Inc. 1 [Subtrack 2] Vehicle Dynamics Blockset 소개 김종헌부장 2015 The MathWorks, Inc. 2 Agenda What is Vehicle Dynamics Blockset? How can I use it? 3 Agenda What is Vehicle Dynamics Blockset?
2015 The MathWorks, Inc. 1 [Subtrack 2] Vehicle Dynamics Blockset 소개 김종헌부장 2015 The MathWorks, Inc. 2 Agenda What is Vehicle Dynamics Blockset? How can I use it? 3 Agenda What is Vehicle Dynamics Blockset?
Powertrain and Chassis Hardware-in-the- Loop (HIL) Simulation of Ford s Autonomous Vehicle Platform
 Simulation of Ford s Autonomous Vehicle Platform") Powertrain and Chassis Hardware-in-the- Loop (HIL) Simulation of Ford s Autonomous Vehicle Platform Adit Joshi Research Engineer Automated Driving HIL Simulation Ford Motor Company 1 OUTLINE Autonomous
Powertrain and Chassis Hardware-in-the- Loop (HIL) Simulation of Ford s Autonomous Vehicle Platform Adit Joshi Research Engineer Automated Driving HIL Simulation Ford Motor Company 1 OUTLINE Autonomous
PSA Peugeot Citroën Driving Automation and Connectivity
 PSA Peugeot Citroën Driving Automation and Connectivity June 2015 Automation Driver Levels of Automated Driving Driver continuously performs the longitudinal and lateral dynamic driving task Driver continuously
PSA Peugeot Citroën Driving Automation and Connectivity June 2015 Automation Driver Levels of Automated Driving Driver continuously performs the longitudinal and lateral dynamic driving task Driver continuously
Truck CACC Fuel Economy Testing: Initial Test Track Results
 Truck CACC Fuel Economy Testing: Initial Test Track Results X. Y. Lu California PATH Program, U. C. Berkeley Barry Pekilis, ecotechnology for Vehicles, Transport Canada TRB Vehicle-Highway Automation Committee
Truck CACC Fuel Economy Testing: Initial Test Track Results X. Y. Lu California PATH Program, U. C. Berkeley Barry Pekilis, ecotechnology for Vehicles, Transport Canada TRB Vehicle-Highway Automation Committee
Joe Averkamp ITS Georgia October, 2017 Savannah, GA
 NHTSA, DSRC, and V2X: The Future of Vehicle Communications Joe Averkamp ITS Georgia October, 2017 Savannah, GA How Could Things Go Differently If I had given my customers what they asked for, it would
NHTSA, DSRC, and V2X: The Future of Vehicle Communications Joe Averkamp ITS Georgia October, 2017 Savannah, GA How Could Things Go Differently If I had given my customers what they asked for, it would
The intelligent Truck safe, autonomous, connected. N. Mustafa Üstertuna Mercedes-Benz Türk A.Ş.
 The intelligent Truck safe, autonomous, connected N. Mustafa Üstertuna Mercedes-Benz Türk A.Ş. Challenges in the transportation industry Accidents Short Delivery Times On-Highway Traffic Urban Pollution
The intelligent Truck safe, autonomous, connected N. Mustafa Üstertuna Mercedes-Benz Türk A.Ş. Challenges in the transportation industry Accidents Short Delivery Times On-Highway Traffic Urban Pollution
Stop Sign Gap Assistance At Rural Expressway Intersections
 Stop Sign Gap Assistance At Rural Expressway Intersections Minnesota Department of Transportation University of Minnesota Outline What is Stop Sign Gap Assistance? Part of Multi-State Effort Crash Data
Stop Sign Gap Assistance At Rural Expressway Intersections Minnesota Department of Transportation University of Minnesota Outline What is Stop Sign Gap Assistance? Part of Multi-State Effort Crash Data
Simulation of the influence of road traffic on the operation of an electric city bus
 Simulation of the influence of road traffic on the operation of apply & innovate 2014 Manuel Großkinsky Chair of railway system technology, Karlsruhe Institute of Technology KIT University of the State
Simulation of the influence of road traffic on the operation of apply & innovate 2014 Manuel Großkinsky Chair of railway system technology, Karlsruhe Institute of Technology KIT University of the State
Improving moving jam detection performance. with V2I communication
 Improving moving jam detection performance with V2I communication Bart Netten Senior Researcher, TNO Oude Waalsdorperweg 63, 2597 AK The Hague, The Netherlands, +31 888 666 310, bart.netten@tno.nl Andreas
Improving moving jam detection performance with V2I communication Bart Netten Senior Researcher, TNO Oude Waalsdorperweg 63, 2597 AK The Hague, The Netherlands, +31 888 666 310, bart.netten@tno.nl Andreas
Energy Saving Through Connected and Automated Vehicles --what we learned at UM/Mcity
 Energy Saving Through Connected and Automated Vehicles --what we learned at UM/Mcity Huei Peng Director, Mcity Roger L. McCarthy Professor of Mechanical Engineering CONDUCTING RESEARCH AT ALL LEVELS Component
Energy Saving Through Connected and Automated Vehicles --what we learned at UM/Mcity Huei Peng Director, Mcity Roger L. McCarthy Professor of Mechanical Engineering CONDUCTING RESEARCH AT ALL LEVELS Component
Introduction of SMART Highway Test Bed and Test Results. Joonsoo Shin Korea Expressway Co.
 Introduction of SMART Highway Test Bed and Test Results Joonsoo Shin Korea Expressway Co. Contents Overview of SMART Highway Project Best Practices of Developed Technologies Smart Highway Test Bed Test
Introduction of SMART Highway Test Bed and Test Results Joonsoo Shin Korea Expressway Co. Contents Overview of SMART Highway Project Best Practices of Developed Technologies Smart Highway Test Bed Test
Innovative Technology in Construction and Work Zone Safety
 Innovative Technology in Construction and Work Zone Safety Andy Schaudt, M.S. August 3 rd, 2011 Research Associate, Advanced Systems and Applications Virginia Tech Transportation Institute Leader in transportation
Innovative Technology in Construction and Work Zone Safety Andy Schaudt, M.S. August 3 rd, 2011 Research Associate, Advanced Systems and Applications Virginia Tech Transportation Institute Leader in transportation
AVL CALIBRATION TECHNOLOGIES
 Daniel Baumann, IT AVL CALIBRATION TECHNOLOGIES Today s Message G. Vitale AVL List GmbH (Headquarters) Load Load POWERTRAIN CALIBRATION EVOLUTION IN THE LAST 20 YEARS Months Months Months ~500 ~5k ~50k
Daniel Baumann, IT AVL CALIBRATION TECHNOLOGIES Today s Message G. Vitale AVL List GmbH (Headquarters) Load Load POWERTRAIN CALIBRATION EVOLUTION IN THE LAST 20 YEARS Months Months Months ~500 ~5k ~50k
Implementation and application of Simpackmulti-attribute vehicle models at Toyota Motor Europe
 Implementation and application of Simpackmulti-attribute vehicle models at Toyota Motor Europe Ernesto Mottola, PhD. Takao Sugai Vehicle Performance Engineering Toyota Motor Europe NV/SA Technical Center
Implementation and application of Simpackmulti-attribute vehicle models at Toyota Motor Europe Ernesto Mottola, PhD. Takao Sugai Vehicle Performance Engineering Toyota Motor Europe NV/SA Technical Center
DOE s Focus on Energy Efficient Mobility Systems
 DOE s Focus on Energy Efficient Mobility Systems Mark Smith Vehicle Technologies Office NASEO Smart Mobility Webinar October 30, 2017 MOBILITY IS FOUNDATIONAL TO OUR WAY OF LIFE 2 CONVERGING TRENDS ARE
DOE s Focus on Energy Efficient Mobility Systems Mark Smith Vehicle Technologies Office NASEO Smart Mobility Webinar October 30, 2017 MOBILITY IS FOUNDATIONAL TO OUR WAY OF LIFE 2 CONVERGING TRENDS ARE
The Role of Infrastructure Connected to Cars & Autonomous Driving INFRAMIX PROJECT
 The Role of Infrastructure Connected to Cars & Autonomous Driving INFRAMIX PROJECT 20-11-18 1 Index 01 Abertis Autopistas 02 Introduction 03 Road map AV 04 INFRAMIX project 05 Test site autopistas 06 Classification
The Role of Infrastructure Connected to Cars & Autonomous Driving INFRAMIX PROJECT 20-11-18 1 Index 01 Abertis Autopistas 02 Introduction 03 Road map AV 04 INFRAMIX project 05 Test site autopistas 06 Classification
Cybercars : Past, Present and Future of the Technology
 Cybercars : Past, Present and Future of the Technology Michel Parent*, Arnaud de La Fortelle INRIA Project IMARA Domaine de Voluceau, Rocquencourt BP 105, 78153 Le Chesnay Cedex, France Michel.parent@inria.fr
Cybercars : Past, Present and Future of the Technology Michel Parent*, Arnaud de La Fortelle INRIA Project IMARA Domaine de Voluceau, Rocquencourt BP 105, 78153 Le Chesnay Cedex, France Michel.parent@inria.fr
Satellite navigation traffic control system for low traffic lines Actual status and future deployment in Romania
 Satellite navigation traffic control system for low traffic lines Actual status and future deployment in Romania Teodor Gradinariu UIC Burkhard Stadlmann Wels University, Austria Ioan Nodea RCCF, Romania
Satellite navigation traffic control system for low traffic lines Actual status and future deployment in Romania Teodor Gradinariu UIC Burkhard Stadlmann Wels University, Austria Ioan Nodea RCCF, Romania
Automotive Electronics/Connectivity/IoT/Smart City Track
 Automotive Electronics/Connectivity/IoT/Smart City Track The Automobile Electronics Sessions explore and investigate the ever-growing world of automobile electronics that affect virtually every aspect
Automotive Electronics/Connectivity/IoT/Smart City Track The Automobile Electronics Sessions explore and investigate the ever-growing world of automobile electronics that affect virtually every aspect
Modeling and Simulate Automotive Powertrain Systems
 Modeling and Simulate Automotive Powertrain Systems Maurizio Dalbard 2015 The MathWorks, Inc. 1 Model-Based Design Challenges It s hard to do good Model-Based Design without good models Insufficient expertise
Modeling and Simulate Automotive Powertrain Systems Maurizio Dalbard 2015 The MathWorks, Inc. 1 Model-Based Design Challenges It s hard to do good Model-Based Design without good models Insufficient expertise
Building Fast and Accurate Powertrain Models for System and Control Development
 Building Fast and Accurate Powertrain Models for System and Control Development Prasanna Deshpande 2015 The MathWorks, Inc. 1 Challenges for the Powertrain Engineering Teams How to design and test vehicle
Building Fast and Accurate Powertrain Models for System and Control Development Prasanna Deshpande 2015 The MathWorks, Inc. 1 Challenges for the Powertrain Engineering Teams How to design and test vehicle
Volvo outlook on vehicle automation
 Volvo outlook on vehicle automation Lars Bjelkeflo, Advanced Technology and Research Kärnvärden Drivers for automation of commercial vehicles Safety Environmental Productivity & Cost Safety Active Safety
Volvo outlook on vehicle automation Lars Bjelkeflo, Advanced Technology and Research Kärnvärden Drivers for automation of commercial vehicles Safety Environmental Productivity & Cost Safety Active Safety
Future Propulsion Systems
 Future Propulsion Systems John Kirwan Chief Engineer Advanced Research & Development 31 July 2018 Driven to make a difference Delphi Technologies Overview 12 major technical centers 24 manufacturing facilities
Future Propulsion Systems John Kirwan Chief Engineer Advanced Research & Development 31 July 2018 Driven to make a difference Delphi Technologies Overview 12 major technical centers 24 manufacturing facilities