Jalil Kianfar, Ph.D. Assistant Professor of Civil Engineering
|
|
|
- Cordelia Murphy
- 5 years ago
- Views:
Transcription
1 Jalil Kianfar, Ph.D. Assistant Professor of Civil Engineering Parks College of Engineering, Aviation and Technology Saint Louis University 3450 Lindell Blvd, Rm 2037 St. Louis, MO Phone (314) November 19,



2 2

3 Entrepreneurship and Transportation 3
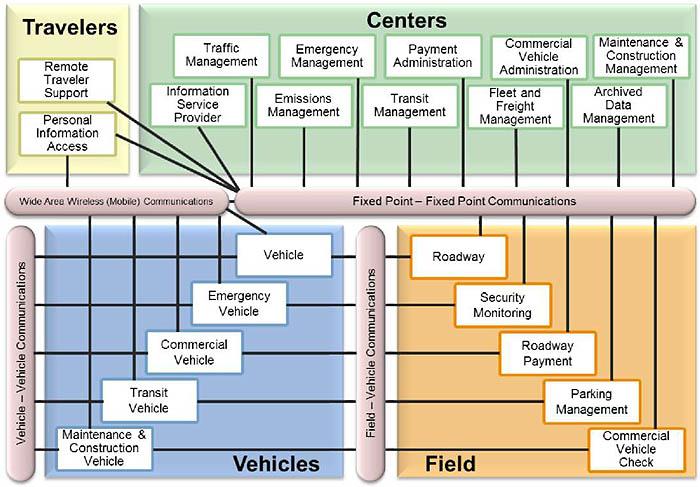
4 Intelligent Transportation Systems What is ITS? 4


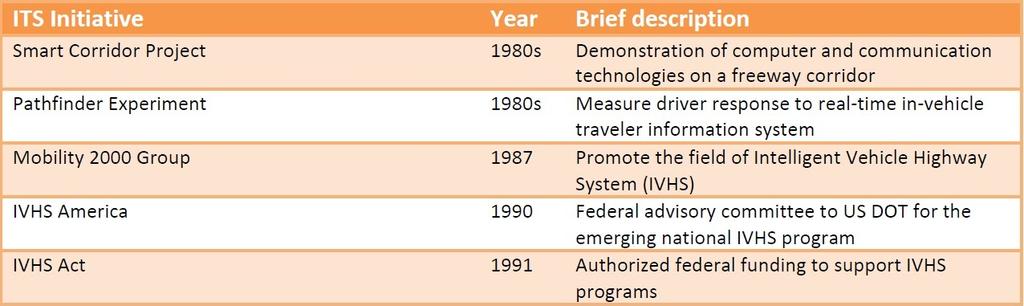
5 History of ITS 5
6 6


7 What is a traffic detector? Traffic detector is. What parameters it collects: 7 7
8 What is a traffic detector Traffic detector is. an integral part of ITS that automatically collects traffic parameters Which parameters are collected? Flow Speed Occupancy (Density) Time Headway Vehicle Classification 8 8

9 Occupancy 9 9

10 Examples of Detector Data Applications Travel Time Estimation Congestion Maps Incident Detection Traffic Signals Ramp Metering Enforcement Equipments HPMS Program Traffic Studies 10 10
11 Modern Traffic Detectors IN-ROADWAY SENSORS (Intrusive) Embedded in the pavement of the roadway, Embedded in the subgrade of the roadway, Taped or otherwise attached to the surface of the roadway. OVER-ROADWAY SENSORS (Non-Intrusive) Above the roadway or Alongside the roadway, offset from the nearest traffic lane by some distance
12 Modern Traffic Detectors Pneumatic Magnetic Inductive Loop Microwave Video Image Processing Piezoelectric Acoustic Ultrasonic Infrared 12 12
")
13 Inductive Loop Detectors (ILD) 13 13
14 Inductive Loop Detectors (ILD) Presence or passage of a vehicle causes an increase in the oscillation frequency, controller unit logs presence or passage
15 Speed Measurement with ILD Trade-offs for space between detectors: 15 15

16 Speed Measurement with ILD Trade-offs for space between detectors: Long distance: Vehicle Lane Change Short distance: Sensor Cross Talk 16

 in the Earth s magnetic field")
17 Magnetic Detectors Magnetic sensors are passive devices that indicate the presence of a metallic object by detecting the perturbation (known as a magnetic anomaly) in the Earth s magnetic field created by the object. 17
")
18 Perturbation of Earth s magnetic field by a ferrous metal vehicle (Drawing courtesy of Nu-Metrics, Vanderbilt, PA) 18

19 Pneumatic Tube Changes in tube air pressure, results in an electrical signal, which is used to count axles. 19

20 Pneumatic Tube Configuration Photograph courtesy of Time Mark, Inc., Salem, OR 20

21 Microwave Radar (RTMS) The Remote Traffic Microwave Sensor (RTMS) is a radar vehicle detector. Capable of measuring the distance to objects by radiated and reflected microwave signals. 21

22 Image Processing Detectors 22

23 Image Processing Detectors 23 23
24 Modern Traffic Detectors Pneumatic Magnetic Inductive Loop Microwave Video Image Processing Piezoelectric Acoustic Ultrasonic Infrared 24 24

25 Other detection methods Cell phones GPS AVI/AVL Connected Vehicles Pedestrian detectors Bike detectors 25 25
26 Detector Selection Factors Traffic Parameters Needed Cost Maintenance Accuracy Environmental Conditions Power and Communication Needs 26 26
27 References The Vehicle Detector Clearinghouse, A Summary of Vehicle Detection and Surveillance Technologies used in Intelligent Transportation Systems, August 2007 ITS Decision, accessed September 12,

28 Connected Vehicles 28
29 29
30 Learning Objectives 1. Provide an overview of the connected vehicle program 2. Understand history, evolution, and future direction of connected vehicle program 3. Understand partnership and roles of government and industry 4. Understand basic technologies and core systems 5. Understand key policy, legal, and funding issues 30

31 Definition of a Connected Vehicle Environment Wireless connectivity among vehicles, the infrastructure, and mobile devices, resulting in transformative change to: Highway safety Mobility Environmental impacts Source: USDOT 31

32 Wireless Communications for Connected Vehicles Core technology for Connected Vehicle applications Safety-related systems to be based on Dedicated Short Range Communications Non-safety applications may be based on other technologies DSRC characteristics: 75 MHz of bandwidth at 5.9 GHz Low latency Limited interference Performance under adverse conditions Source: USDOT 32
33 Connected Vehicle Benefits Connected Vehicles will benefit the public good by: Reducing highway crashes Potential to address up to 81% of unimpaired crashes Improving mobility Reducing environmental impact Additional benefits to public agency transportation system management and operations 33
34 Historical Context Current program results from more than a decade of research: 2003 Vehicle Infrastructure Integration (VII) program formed by USDOT, AASHTO, and carmakers 2006 VII Concept of Operations published by USDOT VII Proof-of-Concept in Michigan and California VII renamed to Connected Vehicle program 34
35 Connected Vehicle Program Today Current research addresses key strategic challenges: Remaining technical challenges Testing to determine actual benefits Determining if benefits are sufficient to warrant implementation Issues of public acceptance 35

36 Key Decision Points Decisions to be made on core technologies: 2013 NHTSA agency decision on implementation of DSRC in light vehicles 2014 decision regarding DSRC in heavy vehicles Information to support the decision will come from multiple sources, including the Safety Pilot Model Deployment 36

37 Connected Vehicle Safety Pilot 2,800 vehicles (cars, buses, and trucks) equipped with V2V devices Provide data for determining the technologies effectiveness at reducing crashes Includes vehicles with embedded equipment and others that use aftermarket devices or a simple communications beacon Image source: USDOT 37

38 Safety Pilot V2V Applications Applications to be tested include: Forward Collision Warning Electronic Emergency Brake Lights Blind Spot Warning/Lane Change Warning Intersection Movement Assist Do Not Pass Warning Left Turn Assist Source: USDOT 38
39 V2I Safety Applications Use data exchanged between vehicles and roadway infrastructure to identify high-risk situations and issue driver alerts and warnings Traffic signals will communicate signal phase and timing (SPaT) data to vehicles to deliver active safety messages to drivers Source: USDOT 39

40 Typical V2I Safety Applications Candidate applications under development include: Red Light Warning Curve Speed Warning Stop Sign Gap Assist Railroad Crossing Violation Warning Spot Weather Impact Warning Oversize Vehicle Warning Reduced Speed/Work Zone Warning Source: USDOT 40

41 Connected Vehicle Mobility Applications Provide an interconnected, data-rich travel environment Used by transportation managers to optimize operations, focusing on reduced delays and congestion 41
42 Potential Dynamic Mobility Applications EnableATIS support sharing of travel information IDTO support transit mobility, operations, and services MMITSS maximize arterial flows for transit, freight, emergency vehicle, and pedestrians INFLO optimize flow with queue warning and speed harmonization R.E.S.C.U.M.E. support incident management and mass evacuations FRATIS freight-specific information systems or drayage optimization 42
43 Connected Vehicle Transit Applications Three Integrated Dynamic Transit Operations (IDTO) applications developed: Dynamic Transit Operations (T-DISP) Connect Protection (T-CONNECT) Dynamic Ridesharing (D-RIDE) Additional transit safety applications in the Safety Pilot: Emergency Electronic Brake Lights (EEBL) Forward Collision Warning (FCW) Vehicle Turning Right in Front of Bus Warning (VTRW) Curve Speed Warning (CSW) Pedestrian in Crosswalk Warning (PCW) 43
44 Connected Vehicle Environmental Applications Generate and capture relevant, real-time transportation data to support environmentally friendly travel choices for: Travelers Road operating agencies Car, truck, and transit drivers 44

45 USDOT AERIS Program Research on connected vehicle environmental applications conducted within the AERIS program 45
46 Connected Vehicle Environmental Applications Generate and capture relevant, real-time transportation data to support environmentally friendly travel choices Travelers avoid congestion, take alternate routes or transit, or reschedule their trip to be more fuel-efficient Operators receive real-time information on vehicle location, speed, and other operating conditions to improve system operation Drivers optimize the vehicle's operation and maintenance for maximum fuel efficiency 46
47 Potential AERIS Concepts Eco-Signal Operations Optimize roadside and traffic signal equipment to collect and share relevant positional and emissions data to lessen transportation environmental impact. Dynamic Eco-Lanes Like HOT and HOV lanes but optimized to support freight, transit, alternative fuel, or regular vehicles operating in eco-friendly ways Dynamic Low Emissions Zones Similar to cordon areas with fixed infrastructure but designed to provide incentives for eco-friendly driving 47

48 Connected Vehicle Technology Onboard or mobile equipment Roadside equipment Communications systems Core systems Support systems Source: USDOT 48
49 Dedicated Short-Range Communications Technologies developed for vehicular communications FCC allocated 75 MHz of spectrum in 5.9 GHz band To be used to protect the safety of the traveling public A communications protocol similar to WiFi Derived from the IEEE standard DSRC includes WAVE Short Message protocol defined in IEEE 1609 standard Typical range of a DSRC access point is 300 m Typical installations at intersections and other roadside locations 49
50 Key DSRC Functional Capabilities DSRC is the only short-range wireless technology that provides: Fast network acquisition, low-latency, high-reliability communications link An ability to work with vehicles operating at high speeds An ability to prioritize safety messages Tolerance to multipath transmissions typical of roadway environments Performance that is immune to extreme weather conditions (e.g., rain, fog, snow) Protection of security and privacy of messages 50
51 DSRC for Active Safety Applications Source: USDOT 51
52 Cellular Communications USDOT committed to DSRC for active safety, but will explore other wireless technologies Cellular communications is a candidate for some safety, mobility, and environmental applications LTE technologies can provide high-speed data rates to a large number of users simultaneously Technologies are intended to serve mobile users Good coverage all urban areas and most major highways 52
53 Security Credential Management Connected Vehicle Environment relies on the ability to trust the validity of messages between users Accidental or malicious issue of false messages could have severe consequences Users also have expectation of appropriate privacy in the system Current research indicates use of PKI security system and exchange of digital certificates 53
54 Policy and Institutional Issues May limit successful deployment Collaborative effort among USDOT, industry stakeholders, vehicle manufacturers, state and local governments, associations, and citizens Policy issues and associated research fall into four categories: Implementation Policy Options Technical Policy Options Legal Policy Options Implementation Strategies 54
55 Implementation Policy Options Topics to be addressed: Viable options for financial and investment strategies Analysis and comparisons of communications systems for data delivery Model structures for governance with identified roles and responsibilities Analyses required to support the NHTSA agency decision 55
56 Technical Policy Options Analysis of technical choices for V2V and V2I technologies and applications Identify if options require new institutional models or can leverage existing assets and personnel Technical analyses related to Core System, system interfaces, and device certification and standards 56
57 Legal Policy Options Analysis on the federal role and authority in system development and deployment Analysis of liability and limitations to risk Policy and practices regarding privacy Policies on intellectual property and data ownership 57
58 Implementation Strategies AASHTO conducted a Connected Vehicle Field Infrastructure Deployment Analysis Infrastructure deployment decisions by state and local transportation agencies depend on nature and timing of benefits Benefits depend on availability of Connected Vehicle equipment installed in vehicles Original equipment After-market devices 58
59 Connected Vehicle Market Growth Source: USDOT 59
60 Funding for Infrastructure Deployment Key task facing state and local DOTs is the need to identify a funding mechanism. Capital and ongoing operations and maintenance costs Agencies can consider various funding categories to support deployment. ITS budget or federal/state funds with ITS eligibility Safety improvement program Funds set aside for congestion mitigation or air quality improvement projects Public private partnerships 60
61 Summary The Connected Vehicle Environment: Wireless connectivity among vehicles, infrastructure, and mobile devices Transformative changes in highway safety, mobility, and environmental impact Broad stakeholder base government, industry, researchers Potential benefits Use of V2V and V2I may address 81% of unimpaired crashes in all vehicle types Reduce congestion and vehicle emissions 61
62 Summary (cont d) Current strategic challenges technical, benefits, deployment, public acceptance Connected Vehicle Safety Pilot to support NHTSA agency decisions in 2013 and 2014 Applications allow systems and technologies to deliver services and benefits to users in three broad categories Safety applications (including those based on V2V or V2I communications) Dynamic mobility applications Environmental applications 62
63 Summary (cont d) DSRC technologies developed specifically for vehicular communications Reserved for transportation safety by the FCC DSRC will be used for V2V and V2I active safety Cellular communications can be explored for other safety, mobility, and environmental applications A Public Key Infrastructure (PKI) security system, involving the exchange of digital certificates among trusted users, can support both the need for message security and provide appropriate anonymity to users. 63
64 Summary (cont d) Policy and institutional issues are topics that may limit or challenge successful deployment. An AASHTO Connected Vehicle field infrastructure deployment analysis indicates: Infrastructure deployment decisions of state and local transportation agencies will be based on the nature and timing of benefits Benefits will depend on the availability of Connected Vehicle equipment installed in vehicles, either as original equipment or as after-market devices. 64
65 References AASHTO Subcommittee on Systems Operations and Management Web site: ITS America Web site: The Connected Vehicle - Next Generation ITS, U.S. Department of Transportation, Research and Innovative Technologies Administration, Web site: Connected Vehicle Research, hicle.htm 65

66 Autonomies Vehicles 67
67 Level Automation Level Description Level 0 No Automation Driver is in full control of the vehicle All the control functions require driver s input Safety features available to warn driver about road hazards but will not take any control action (e.g. blind spot monitoring system) Level 1 Function-specific Automation Driver is responsible for safe operation and has overall control of the vehicle One or more control functions could be automated e.g. adaptive cruise control, electronic stability control, or dynamic brake support in crash eminent situations Driver is constantly engaged in physically controlling the vehicle using steering wheel and pedals Level 2 Combined Function Automation Two or more primary control functions are automated. Driver is responsible for monitoring roadway and is in charge of safe operation of the vehicle Driver is expected to be available to take control all the time and on short notice. Unlike level 1, driver could be disengaged from physically controlling the vehicle using steering wheel and pedals during specific operating conditions Level 3 Limited Self- Driving Automation Under certain traffic and environmental conditions driver can ceded control of safety-critical functions to the vehicle Driver is expected to be available for occasional control; however, the transition occurs at a comfortable transition time Unlike level 2, driver is not responsible for constantly monitoring the roadway conditions Level 4 Full Self-Driving Automation Vehicle performs all safety-critical driving functions and monitors the road conditions during the entire trip Driver only has to provide destination or route preference information Driver is not expected to be engaged in any control task during the trip 68
68 Potential impacts Safety Congestion and traffic operations Travel-behavior impacts Freight transportation Changes in VMT and vehicle ownership Discount rate and technology costs 69
69 70
70 Barriers to Implementation Vehicle costs AV certification Litigation, liability and perception Security Privacy 71
APCO International. Emerging Technology Forum
 APCO International Emerging Technology Forum Emerging Vehicle to Vehicle, Vehicle to Infrastructure Communications Cars talking to each other and talking to the supporting highway infrastructure The Regulatory
APCO International Emerging Technology Forum Emerging Vehicle to Vehicle, Vehicle to Infrastructure Communications Cars talking to each other and talking to the supporting highway infrastructure The Regulatory
Beyond ATC and ITS Standards. Edward Fok USDOT/FHWA - RESOURCE CENTER San Francisco
 Beyond ATC and ITS Standards Edward Fok USDOT/FHWA - RESOURCE CENTER San Francisco May, 2014 Signal Control is only the beginning Connected Vehicles Automated Vehicles Infrastructure Data: Fully Connected
Beyond ATC and ITS Standards Edward Fok USDOT/FHWA - RESOURCE CENTER San Francisco May, 2014 Signal Control is only the beginning Connected Vehicles Automated Vehicles Infrastructure Data: Fully Connected
Connected Vehicles for Safety
 Connected Vehicles for Safety Shelley Row Director Intelligent Transportation Systems Joint Program Office Research and Innovative Technology Administration, USDOT The Problem Safety 32,788 highway deaths
Connected Vehicles for Safety Shelley Row Director Intelligent Transportation Systems Joint Program Office Research and Innovative Technology Administration, USDOT The Problem Safety 32,788 highway deaths
TRAFFIC CONTROL. in a Connected Vehicle World
 TRAFFIC CONTROL in a Connected Vehicle World Preparing for the advent of Connected Vehicles and their impact on traffic management and signalized intersection control. Frank Provenzano, Director of Business
TRAFFIC CONTROL in a Connected Vehicle World Preparing for the advent of Connected Vehicles and their impact on traffic management and signalized intersection control. Frank Provenzano, Director of Business
Enhanced Transit Operations and Travel Experience in Connected Vehicle Environment
 Enhanced Transit Operations and Travel Experience in Connected Vehicle Environment Yehuda Gross, USDOT (retired) Gwo-Wei Torng, Noblis Presentation at 2013 National Rural ITS Conference August 28, 2013
Enhanced Transit Operations and Travel Experience in Connected Vehicle Environment Yehuda Gross, USDOT (retired) Gwo-Wei Torng, Noblis Presentation at 2013 National Rural ITS Conference August 28, 2013
V2V Advancements in the last 12 months. CAMP and related activities
 V2V Advancements in the last 12 months CAMP and related activities Mike Shulman, Ford April 22, 2014 Connected Transportation Environment: Future Vision Mobility Safety Environment Global Gridlock 2 US:
V2V Advancements in the last 12 months CAMP and related activities Mike Shulman, Ford April 22, 2014 Connected Transportation Environment: Future Vision Mobility Safety Environment Global Gridlock 2 US:
NHTSA Update: Connected Vehicles V2V Communications for Safety
 NHTSA Update: Connected Vehicles V2V Communications for Safety Alrik L. Svenson Transportation Research Board Meeting Washington, D.C. January 12, 2015 This is US Government work and may be copied without
NHTSA Update: Connected Vehicles V2V Communications for Safety Alrik L. Svenson Transportation Research Board Meeting Washington, D.C. January 12, 2015 This is US Government work and may be copied without
An Introduction to Automated Vehicles
 An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
G4 Apps. Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013
 Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013 Reducing costs, emissions. Improving mobility, efficiency. Safe Broadband Wireless Operations Fusion: Vehicles-Agencies Technologies,
Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013 Reducing costs, emissions. Improving mobility, efficiency. Safe Broadband Wireless Operations Fusion: Vehicles-Agencies Technologies,
Technology for Transportation s Future
 Technology for Transportation s Future Shelley Row Director, ITS Joint Program Office Research and Innovative Technology Administration U.S. Department of Transportation National Conference of State Legislatures
Technology for Transportation s Future Shelley Row Director, ITS Joint Program Office Research and Innovative Technology Administration U.S. Department of Transportation National Conference of State Legislatures
Automation is in the Eye of the Beholder: How it Might be Viewed by the Traffic Engineer
 Automation is in the Eye of the Beholder: How it Might be Viewed by the Traffic Engineer ITE and ITSA Luncheon, Oakland, March 20, 2014 Jim Misener, jmisener@gmail.com 415.335.9252 Agenda Connected Vehicles
Automation is in the Eye of the Beholder: How it Might be Viewed by the Traffic Engineer ITE and ITSA Luncheon, Oakland, March 20, 2014 Jim Misener, jmisener@gmail.com 415.335.9252 Agenda Connected Vehicles
Roy Hulli, P.Eng. and. Fernando Chua. Intelligent Transportation Systems Ministry of Transportation Ontario
 Roy Hulli, P.Eng and Fernando Chua Intelligent Transportation Systems Ministry of Transportation Ontario Smart Cities Data Connectivity Disruption Context of Change Automated Vehicles Monitoring by sensors
Roy Hulli, P.Eng and Fernando Chua Intelligent Transportation Systems Ministry of Transportation Ontario Smart Cities Data Connectivity Disruption Context of Change Automated Vehicles Monitoring by sensors
Future Vehicle Safety: Connected, Cooperative, or Autonomous? Christopher Poe, Ph.D., P.E. Assistant Agency Director
 Future Vehicle Safety: Connected, Cooperative, or Autonomous? Christopher Poe, Ph.D., P.E. Assistant Agency Director TexITE Meeting August 30, 2012 Presentation Outline Connected Vehicle Program Connected
Future Vehicle Safety: Connected, Cooperative, or Autonomous? Christopher Poe, Ph.D., P.E. Assistant Agency Director TexITE Meeting August 30, 2012 Presentation Outline Connected Vehicle Program Connected
Eco-Signal Operations Concept of Operations
 Eco-Signal Operations Concept of Operations Applications for the Environment: Real-Time Information Synthesis (AERIS) Adapted from the Eco-Signal Operations Concept of Operations Document AERIS Operational
Eco-Signal Operations Concept of Operations Applications for the Environment: Real-Time Information Synthesis (AERIS) Adapted from the Eco-Signal Operations Concept of Operations Document AERIS Operational
A Communication-centric Look at Automated Driving
 A Communication-centric Look at Automated Driving Onur Altintas Toyota ITC Fellow Toyota InfoTechnology Center, USA, Inc. November 5, 2016 IEEE 5G Summit Seattle Views expressed in this talk do not necessarily
A Communication-centric Look at Automated Driving Onur Altintas Toyota ITC Fellow Toyota InfoTechnology Center, USA, Inc. November 5, 2016 IEEE 5G Summit Seattle Views expressed in this talk do not necessarily
Stan Caldwell Executive Director Traffic21 Institute Carnegie Mellon University
 Stan Caldwell Executive Director Traffic21 Institute Carnegie Mellon University Connected Vehicles Dedicated Short Range Communication (DSRC) Safer cars. Safer Drivers. Safer roads. Thank You! Tim Johnson
Stan Caldwell Executive Director Traffic21 Institute Carnegie Mellon University Connected Vehicles Dedicated Short Range Communication (DSRC) Safer cars. Safer Drivers. Safer roads. Thank You! Tim Johnson
Leading the way to seamless mobility November th, 2017 Tampa, Florida
 Leading the way to seamless mobility November 14-15 th, 2017 Tampa, Florida usa.siemens.com/intelligenttraffic Urban mobility challenges A view on safety and congestion Trend Challenges + 2 Cities grow
Leading the way to seamless mobility November 14-15 th, 2017 Tampa, Florida usa.siemens.com/intelligenttraffic Urban mobility challenges A view on safety and congestion Trend Challenges + 2 Cities grow
Connected and Automated Vehicle Program Plan. Dean H. Gustafson, PE, PTOE VDOT Statewide Operations Engineer February 10, 2016
 Connected and Automated Vehicle Program Plan Dean H. Gustafson, PE, PTOE VDOT Statewide Operations Engineer February 10, 2016 Connected Vehicle Program continues to evolve at the National Level AASHTO
Connected and Automated Vehicle Program Plan Dean H. Gustafson, PE, PTOE VDOT Statewide Operations Engineer February 10, 2016 Connected Vehicle Program continues to evolve at the National Level AASHTO
Convergence: Connected and Automated Mobility
 Convergence: Connected and Automated Mobility Peter Sweatman Principal, CAVita LLC, Anaheim CA AASHTO CTE Denver June 19, 2018 1 Agenda New technology in mobility: CV, AV and CAV The transformational dynamic
Convergence: Connected and Automated Mobility Peter Sweatman Principal, CAVita LLC, Anaheim CA AASHTO CTE Denver June 19, 2018 1 Agenda New technology in mobility: CV, AV and CAV The transformational dynamic
Connected and Automated Vehicle Activities in the United States
 U.S. Department of Transportation Connected and Automated Vehicle Activities in the United States SIP-adus Workshop on Connected and Automated Driving Systems Kevin Dopart Automation Program Manager, U.S.
U.S. Department of Transportation Connected and Automated Vehicle Activities in the United States SIP-adus Workshop on Connected and Automated Driving Systems Kevin Dopart Automation Program Manager, U.S.
Connected Vehicles. V2X technology.
 EN Kapsch TrafficCom Connected Vehicles. V2X technology. Cooperative Intelligent Transportation Systems (C-ITS) are based on the communication between vehicles and infrastructure (V2I, or vehicle to infrastructure
EN Kapsch TrafficCom Connected Vehicles. V2X technology. Cooperative Intelligent Transportation Systems (C-ITS) are based on the communication between vehicles and infrastructure (V2I, or vehicle to infrastructure
State and Local Implications for Connected and Automated Vehicles. James Pol, PE, PMP. AASHTO SCOHTS Meeting
 State and Local Implications for Connected and Automated Vehicles AASHTO SCOHTS Meeting James Pol, PE, PMP Technical Director FHWA Office of Safety R&D 0 Agenda USDOT ITS Strategic Plan 2015-2019 Connected
State and Local Implications for Connected and Automated Vehicles AASHTO SCOHTS Meeting James Pol, PE, PMP Technical Director FHWA Office of Safety R&D 0 Agenda USDOT ITS Strategic Plan 2015-2019 Connected
3/16/2016. How Our Cities Can Plan for Driverless Cars April 2016
 How Our Cities Can Plan for Driverless Cars April 2016 1 They re coming The state of autonomous vehicle technology seems likely to advance with or without legislative and agency actions at the federal
How Our Cities Can Plan for Driverless Cars April 2016 1 They re coming The state of autonomous vehicle technology seems likely to advance with or without legislative and agency actions at the federal
Recent Transportation Projects
 Dr. Dazhi Sun Associate Professor Director of Texas Transportation Institute Regional Division Department of Civil & Architectural Engineering Texas A&M University-Kingsville 1 Recent Transportation Projects
Dr. Dazhi Sun Associate Professor Director of Texas Transportation Institute Regional Division Department of Civil & Architectural Engineering Texas A&M University-Kingsville 1 Recent Transportation Projects
A Vision for Highway Automation
 A Vision for Highway Automation R y a n D. R i c e D i r e c t o r o f M o b i l i t y O p e r a t i o n s C o l o r a d o D e p a r t m e n t o f T r a n s p o r t a t i o n Problem Statement Higher
A Vision for Highway Automation R y a n D. R i c e D i r e c t o r o f M o b i l i t y O p e r a t i o n s C o l o r a d o D e p a r t m e n t o f T r a n s p o r t a t i o n Problem Statement Higher
2007 ITS World Congress, London, U.K. SS 59 Communications for Vehicle Safety Vehicle Safety Communications in the US
 2007 ITS World Congress, London, U.K. SS 59 Communications for Vehicle Safety Vehicle Safety Communications in the US Dr. Wieland Holfelder, VP&CTO DaimlerChrysler Research and Technology North America,
2007 ITS World Congress, London, U.K. SS 59 Communications for Vehicle Safety Vehicle Safety Communications in the US Dr. Wieland Holfelder, VP&CTO DaimlerChrysler Research and Technology North America,
Opportunities to Leverage Advances in Driverless Car Technology to Evolve Conventional Bus Transit Systems
 Opportunities to Leverage Advances in Driverless Car Technology to Evolve Conventional Bus Transit Systems Podcar City 7 Symposium Emerging Transportation Technologies R&D George Mason University, October
Opportunities to Leverage Advances in Driverless Car Technology to Evolve Conventional Bus Transit Systems Podcar City 7 Symposium Emerging Transportation Technologies R&D George Mason University, October
Transit Connected Vehicle (CV) Research Projects Update
 Research Projects Update") Transit Connected Vehicle (CV) Research Projects Update Tim Weisenberger, US DOT Volpe Center APTA 2016 Fare Collection & Revenue Management Summit The National Transportation Systems Center Advancing
Transit Connected Vehicle (CV) Research Projects Update Tim Weisenberger, US DOT Volpe Center APTA 2016 Fare Collection & Revenue Management Summit The National Transportation Systems Center Advancing
Govind Vadakpat, Research Transportation Specialist Office of Operations R&D, USDOT. U.S. Department of Transportation
 Govind Vadakpat, Research Transportation Specialist Office of Operations R&D, USDOT 1 OVERVIEW Connected Vehicles Pilot Deployment Program Overview Overview of CV Pilot Program Award Sites Wyoming DOT
Govind Vadakpat, Research Transportation Specialist Office of Operations R&D, USDOT 1 OVERVIEW Connected Vehicles Pilot Deployment Program Overview Overview of CV Pilot Program Award Sites Wyoming DOT
Activity-Travel Behavior Impacts of Driverless Cars
 January 12-16, 2014; Washington, D.C. 93 rd Annual Meeting of the Transportation Research Board Activity-Travel Behavior Impacts of Driverless Cars Ram M. Pendyala 1 and Chandra R. Bhat 2 1 School of Sustainable
January 12-16, 2014; Washington, D.C. 93 rd Annual Meeting of the Transportation Research Board Activity-Travel Behavior Impacts of Driverless Cars Ram M. Pendyala 1 and Chandra R. Bhat 2 1 School of Sustainable
Joe Averkamp ITS Georgia October, 2017 Savannah, GA
 NHTSA, DSRC, and V2X: The Future of Vehicle Communications Joe Averkamp ITS Georgia October, 2017 Savannah, GA How Could Things Go Differently If I had given my customers what they asked for, it would
NHTSA, DSRC, and V2X: The Future of Vehicle Communications Joe Averkamp ITS Georgia October, 2017 Savannah, GA How Could Things Go Differently If I had given my customers what they asked for, it would
Associated Pennsylvania Constructors 2019 Construction Innovation Conference. April 4, 2019
 Associated Pennsylvania Constructors 2019 Construction Innovation Conference April 4, 2019 1 2 3 CORRIDOR PROJECT EVOLUTION 2014-15 2016 2017 Collaborative Group Formed to Explore Development Issues along
Associated Pennsylvania Constructors 2019 Construction Innovation Conference April 4, 2019 1 2 3 CORRIDOR PROJECT EVOLUTION 2014-15 2016 2017 Collaborative Group Formed to Explore Development Issues along
Intelligent Vehicle Systems
 Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
Automated Vehicles: Terminology and Taxonomy
 Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
Effects of traffic density on communication requirements for cooperative intersection collision avoidance systems (CICAS)
") Effects of traffic density on communication requirements for cooperative intersection collision avoidance systems (CICAS) ABSTRACT Steven E. Shladover University of California PATH Program, USA Cooperative
Effects of traffic density on communication requirements for cooperative intersection collision avoidance systems (CICAS) ABSTRACT Steven E. Shladover University of California PATH Program, USA Cooperative
Jurisdictional Guidelines for the Safe Testing and Deployment of Highly Automated Vehicles. Developed by the Autonomous Vehicles Working Group
 Jurisdictional Guidelines for the Safe Testing and Deployment of Highly Automated Vehicles Developed by the Autonomous Vehicles Working Group Background: The AVWG The Working Group established fall 2014
Jurisdictional Guidelines for the Safe Testing and Deployment of Highly Automated Vehicles Developed by the Autonomous Vehicles Working Group Background: The AVWG The Working Group established fall 2014
Application of Autonomous Driving Technology to Transit - Functional Capabilities for Safety and Capacity
 Application of Autonomous Driving Technology to Transit - Functional Capabilities for Safety and Capacity Presentation to Federal Transit Administration and American Public Transportation Association July
Application of Autonomous Driving Technology to Transit - Functional Capabilities for Safety and Capacity Presentation to Federal Transit Administration and American Public Transportation Association July
Safe, comfortable and eco-friendly, Smart Connected Society
 Safe, comfortable and eco-friendly, Smart Connected Society Big data Traffic Management Centre Traffic Management for CASE Telematics Centre Energy Management for EV mrong-way detection Safety Support
Safe, comfortable and eco-friendly, Smart Connected Society Big data Traffic Management Centre Traffic Management for CASE Telematics Centre Energy Management for EV mrong-way detection Safety Support
Seminar #294: Transforming Transportation Through Connectivity
 Portland State University PDXScholar TREC Friday Seminar Series Transportation Research and Education Center (TREC) 6-6-2014 Seminar #294: Transforming Transportation Through Connectivity Robert L. Bertini
Portland State University PDXScholar TREC Friday Seminar Series Transportation Research and Education Center (TREC) 6-6-2014 Seminar #294: Transforming Transportation Through Connectivity Robert L. Bertini
Transportation Demand Management Element
 Transportation Demand Management Element Over the years, our reliance on the private automobile as our primary mode of transportation has grown substantially. Our dependence on the automobile is evidenced
Transportation Demand Management Element Over the years, our reliance on the private automobile as our primary mode of transportation has grown substantially. Our dependence on the automobile is evidenced
Engineering Dept. Highways & Transportation Engineering
 The University College of Applied Sciences UCAS Engineering Dept. Highways & Transportation Engineering (BENG 4326) Instructors: Dr. Y. R. Sarraj Chapter 4 Traffic Engineering Studies Reference: Traffic
The University College of Applied Sciences UCAS Engineering Dept. Highways & Transportation Engineering (BENG 4326) Instructors: Dr. Y. R. Sarraj Chapter 4 Traffic Engineering Studies Reference: Traffic
Traffic Operations with Connected and Automated Vehicles
 Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications
 Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications Jiaqi Ma Assistant Professor University of Cincinnati ITS Midwest Annual Meeting Columbus, Ohio, September 29, 2017 Outline
Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications Jiaqi Ma Assistant Professor University of Cincinnati ITS Midwest Annual Meeting Columbus, Ohio, September 29, 2017 Outline
Application of Autonomous Driving Technology to Transit
 Application of Autonomous Driving Technology to Transit 2013 ITS New Jersey Annual Conference MetLife Stadium December 16, 2013 Jerome M. Lutin, Ph.D., P.E. Senior Director, Statewide & Regional Planning
Application of Autonomous Driving Technology to Transit 2013 ITS New Jersey Annual Conference MetLife Stadium December 16, 2013 Jerome M. Lutin, Ph.D., P.E. Senior Director, Statewide & Regional Planning
CONNECTED AND AUTONOMOUS VEHICLES TYLER SVITAK CONNECTED AND AUTONOMOUS TECH PROGRAM MANAGER CDOT INTELLIGENT TRANPSORTATION SYSTEMS (ITS)
") CONNECTED AND AUTONOMOUS VEHICLES TYLER SVITAK CONNECTED AND AUTONOMOUS TECH PROGRAM MANAGER CDOT INTELLIGENT TRANPSORTATION SYSTEMS (ITS) CHALLENGES Safety Congestion Air Quality Cost 700 600 500 400
CONNECTED AND AUTONOMOUS VEHICLES TYLER SVITAK CONNECTED AND AUTONOMOUS TECH PROGRAM MANAGER CDOT INTELLIGENT TRANPSORTATION SYSTEMS (ITS) CHALLENGES Safety Congestion Air Quality Cost 700 600 500 400
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY
 ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY Bill Gouse Director, Federal Program Development Global Ground Vehicle Standards
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY Bill Gouse Director, Federal Program Development Global Ground Vehicle Standards
Application of Autonomous Vehicle Technology to Public Transit
 Application of Autonomous Vehicle Technology to Public Transit University Transportation Research Center 2014 Ground Transportation Technology Symposium November 19, 2014 Jerome M. Lutin, Ph.D., P.E. Senior
Application of Autonomous Vehicle Technology to Public Transit University Transportation Research Center 2014 Ground Transportation Technology Symposium November 19, 2014 Jerome M. Lutin, Ph.D., P.E. Senior
Smart City/Smart Mobility Strategy. Hans Larsen, Fremont Public Works Director May 2, 2018
 Smart City/Smart Mobility Strategy Hans Larsen, Fremont Public Works Director May 2, 2018 About Fremont 230,000 Population; 4 th Largest City in Bay Area About Fremont #1 Happiest Place to Live in America
Smart City/Smart Mobility Strategy Hans Larsen, Fremont Public Works Director May 2, 2018 About Fremont 230,000 Population; 4 th Largest City in Bay Area About Fremont #1 Happiest Place to Live in America
Innovative Technology in Construction and Work Zone Safety
 Innovative Technology in Construction and Work Zone Safety Andy Schaudt, M.S. August 3 rd, 2011 Research Associate, Advanced Systems and Applications Virginia Tech Transportation Institute Leader in transportation
Innovative Technology in Construction and Work Zone Safety Andy Schaudt, M.S. August 3 rd, 2011 Research Associate, Advanced Systems and Applications Virginia Tech Transportation Institute Leader in transportation
MEETING 21 ST CENTURY TRANSPORTATION CHALLENGES: Entering New Era of Redefining Mobility. SUSAN MARLOW, GISP Principal at Stantec MAPPS President
 MEETING 21 ST CENTURY TRANSPORTATION CHALLENGES: Entering New Era of Redefining Mobility SUSAN MARLOW, GISP Principal at Stantec MAPPS President I help clients make informed decisions by providing effective
MEETING 21 ST CENTURY TRANSPORTATION CHALLENGES: Entering New Era of Redefining Mobility SUSAN MARLOW, GISP Principal at Stantec MAPPS President I help clients make informed decisions by providing effective
Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts
 Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts Office of Analysis, Research, and Technology Federal Motor Carrier Safety Administration Managing Fatigue Conference Mar
Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts Office of Analysis, Research, and Technology Federal Motor Carrier Safety Administration Managing Fatigue Conference Mar
Traffic Data Services: reporting and data analytics using cellular data
 Make traffic and population movement analysis smart, fast, pervasive and cost-effective. Data sheet Traffic Data Services: reporting and data analytics using cellular data Accurate data collection and
Make traffic and population movement analysis smart, fast, pervasive and cost-effective. Data sheet Traffic Data Services: reporting and data analytics using cellular data Accurate data collection and
Smart Cities Tampa s Perspective. Vik Bhide Chief Traffic Management Engineer
 Smart Cities Tampa s Perspective Vik Bhide Chief Traffic Management Engineer AGENDA Smart City Context Key Technologies Developing Smart City Framework Tampa s Smart City Projects AGENDA Smart City Context
Smart Cities Tampa s Perspective Vik Bhide Chief Traffic Management Engineer AGENDA Smart City Context Key Technologies Developing Smart City Framework Tampa s Smart City Projects AGENDA Smart City Context
AUTOMATED VEHICLES AND TRANSIT
 AUTOMATED VEHICLES AND TRANSIT 2017 OPTC Conference Oct. 3, 2017 Pendleton, OR Andrew Dick, CAEV Advisor 2 1 94% of motor vehicle crashes are primarily caused by human error motor vehicle deaths in U.S.,
AUTOMATED VEHICLES AND TRANSIT 2017 OPTC Conference Oct. 3, 2017 Pendleton, OR Andrew Dick, CAEV Advisor 2 1 94% of motor vehicle crashes are primarily caused by human error motor vehicle deaths in U.S.,
V2X Outlook. Doug Patton. Society of Automotive Analysts Automotive Outlook Conference January 8, 2017
 V2X Outlook Doug Patton Executive Vice President Engineering Division DENSO International America, Inc. Society of Automotive Analysts Automotive Outlook Conference January 8, 2017 Societal Impact Federal
V2X Outlook Doug Patton Executive Vice President Engineering Division DENSO International America, Inc. Society of Automotive Analysts Automotive Outlook Conference January 8, 2017 Societal Impact Federal
Commercial Vehicle Infrastructure Integration (CVII) Program
 Program") Office of Modal Safety & Security Services New York State Department of Transportation Commercial Vehicle Infrastructure Integration (CVII) Program ITS New York Annual Meeting June 9 th -10 th, 2011 What
Office of Modal Safety & Security Services New York State Department of Transportation Commercial Vehicle Infrastructure Integration (CVII) Program ITS New York Annual Meeting June 9 th -10 th, 2011 What
CONNECTED AUTOMATION
 CONNECTED AUTOMATION Roger Berg - Vice President North America Research and Development DENSO Corporation DENSO International America, Inc. All rights reserved. DENSO s Global Product and R&D Focus Fuel
CONNECTED AUTOMATION Roger Berg - Vice President North America Research and Development DENSO Corporation DENSO International America, Inc. All rights reserved. DENSO s Global Product and R&D Focus Fuel
Automated driving in urban environments: technical challenges, open problems and barriers. Fawzi Nashashibi
 Automated driving in urban environments: technical challenges, open problems and barriers Fawzi Nashashibi 6th Workshop on Planning, Perception and Navigation for Intelligent Vehicles SEPTEMBER 14, 2014
Automated driving in urban environments: technical challenges, open problems and barriers Fawzi Nashashibi 6th Workshop on Planning, Perception and Navigation for Intelligent Vehicles SEPTEMBER 14, 2014
The Future is Bright! So how do we get there? Council of State Governments West Annual Meeting August 18, 2017
 The Future is Bright! So how do we get there? Council of State Governments West Annual Meeting August 18, 2017 1 The Intersection of Technology Transportation options that were once a fantasy are now reality:
The Future is Bright! So how do we get there? Council of State Governments West Annual Meeting August 18, 2017 1 The Intersection of Technology Transportation options that were once a fantasy are now reality:
Planning for Future Mobility In a Performance-Based World Steven Gayle, PTP
 Planning for Future Mobility In a Performance-Based World Steven Gayle, PTP September 26, 2018 MPOs at the Intersection 2 Performance-Based Planning New planning paradigm introduced in MAP-21 MPOs and
Planning for Future Mobility In a Performance-Based World Steven Gayle, PTP September 26, 2018 MPOs at the Intersection 2 Performance-Based Planning New planning paradigm introduced in MAP-21 MPOs and
Enhancing Safety Through Automation
 Enhancing Safety Through Automation TRB Automated Vehicle Workshop, July 25, 2012 Tim Johnson Director, Office of Crash Avoidance and Electronic Controls Research National Highway Traffic Safety Administration
Enhancing Safety Through Automation TRB Automated Vehicle Workshop, July 25, 2012 Tim Johnson Director, Office of Crash Avoidance and Electronic Controls Research National Highway Traffic Safety Administration
Modeling Driver Behavior in a Connected Environment Integration of Microscopic Traffic Simulation and Telecommunication Systems.
 Modeling Driver Behavior in a Connected Environment Integration of Microscopic Traffic Simulation and Telecommunication Systems Alireza Talebpour Information Level Connectivity in the Modern Age Sensor
Modeling Driver Behavior in a Connected Environment Integration of Microscopic Traffic Simulation and Telecommunication Systems Alireza Talebpour Information Level Connectivity in the Modern Age Sensor
Robots on Our Roads: The Coming Revolution in Mobility. Ohio Planning Conference July 27, 2016 Richard Bishop
 Robots on Our Roads: The Coming Revolution in Mobility Ohio Planning Conference July 27, 2016 Richard Bishop Myths! The roads need to be changed to make automated driving possible. WRONG! All vehicles
Robots on Our Roads: The Coming Revolution in Mobility Ohio Planning Conference July 27, 2016 Richard Bishop Myths! The roads need to be changed to make automated driving possible. WRONG! All vehicles
Test & Validation Challenges Facing ADAS and CAV
 Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
Traffic Management through C-ITS and Automation: a perspective from the U.S.
 Traffic Management through C-ITS and Automation: a perspective from the U.S. Matthew Barth University of California-Riverside Yeager Families Professor Director, Center for Environmental Research and Technology
Traffic Management through C-ITS and Automation: a perspective from the U.S. Matthew Barth University of California-Riverside Yeager Families Professor Director, Center for Environmental Research and Technology
Smart Cities Around the Country
 Smart Cities Around the Country Robert James Date 11/09/2017 Contact rojames@hntb.com (732) 689-1989 2 Automated Intersection https://youtu.be/4smjp8tdwtu Smart Cities A Smart City utilizes innovative
Smart Cities Around the Country Robert James Date 11/09/2017 Contact rojames@hntb.com (732) 689-1989 2 Automated Intersection https://youtu.be/4smjp8tdwtu Smart Cities A Smart City utilizes innovative
THE FUTURE OF TRANSPORTATION DESIGN WITH AV/CV TECHNOLOGY
 THE FUTURE OF TRANSPORTATION DESIGN WITH AV/CV TECHNOLOGY March 6, 2019 Chris Pauly 2018 HDR, Inc., all rights reserved. Technology Trends Future-Proofing Roadways Timelines TECHNOLOGY TRENDS Autonomous
THE FUTURE OF TRANSPORTATION DESIGN WITH AV/CV TECHNOLOGY March 6, 2019 Chris Pauly 2018 HDR, Inc., all rights reserved. Technology Trends Future-Proofing Roadways Timelines TECHNOLOGY TRENDS Autonomous
Autonomous Vehicles. Kevin Lacy, PE, State Traffic Engineer
 Autonomous Vehicles Kevin Lacy, PE, State Traffic Engineer Nomenclature Connected Vehicles Vehicles Connected to: Each other sending information to each other about speed, braking, other information needed
Autonomous Vehicles Kevin Lacy, PE, State Traffic Engineer Nomenclature Connected Vehicles Vehicles Connected to: Each other sending information to each other about speed, braking, other information needed
Dallas Integrated Corridor Management System Lessons Learned. June 2, 2014
 Dallas Integrated Corridor Management System Lessons Learned June 2, 2014 US 75 Corridor Networks Freeway with continous Frontage Roads Managed HOV lanes Dallas North Tollway 167 Miles of Arterials DART
Dallas Integrated Corridor Management System Lessons Learned June 2, 2014 US 75 Corridor Networks Freeway with continous Frontage Roads Managed HOV lanes Dallas North Tollway 167 Miles of Arterials DART
Connected Vehicles and Emergency Responder Technologies
 Connected Vehicles and Emergency Responder Technologies Response, Emergency Staging, Communications, Uniform Management, and Evacuation (R.E.S.C.U.M.E.) 39th Annual IACP Law Enforcement Information Management
Connected Vehicles and Emergency Responder Technologies Response, Emergency Staging, Communications, Uniform Management, and Evacuation (R.E.S.C.U.M.E.) 39th Annual IACP Law Enforcement Information Management
Northeast Autonomous and Connected Vehicle Summit
 Northeast Autonomous and Connected Vehicle Summit June 12, 2018 Cathie Curtis, Director, Vehicle Programs AAMVA 1 1 Founded in 1933, the American Association of Motor Vehicle Administrators (AAMVA) represents
Northeast Autonomous and Connected Vehicle Summit June 12, 2018 Cathie Curtis, Director, Vehicle Programs AAMVA 1 1 Founded in 1933, the American Association of Motor Vehicle Administrators (AAMVA) represents
Metropolitan Freeway System 2013 Congestion Report
 Metropolitan Freeway System 2013 Congestion Report Metro District Office of Operations and Maintenance Regional Transportation Management Center May 2014 Table of Contents PURPOSE AND NEED... 1 INTRODUCTION...
Metropolitan Freeway System 2013 Congestion Report Metro District Office of Operations and Maintenance Regional Transportation Management Center May 2014 Table of Contents PURPOSE AND NEED... 1 INTRODUCTION...
ROADMAP TO VEHICLE CONNECTIVITY
 ROADMAP TO VEHICLE CONNECTIVITY September 2018 CONTACT INFORMATION If you have any questions about this report, please contact: Scott Belcher, SFB Consulting, LLC scottfbelcher@gmail.com (703) 447-0263
ROADMAP TO VEHICLE CONNECTIVITY September 2018 CONTACT INFORMATION If you have any questions about this report, please contact: Scott Belcher, SFB Consulting, LLC scottfbelcher@gmail.com (703) 447-0263
Helping Autonomous Vehicles at Signalized Intersections. Ousama Shebeeb, P. Eng. Traffic Signals Engineer. Ministry of Transportation of Ontario
 Helping Autonomous Vehicles at Signalized Intersections Ousama Shebeeb, P. Eng. Traffic Signals Engineer Ministry of Transportation of Ontario Paper Prepared for Presentation At the NEXT GENERATION TRANSPORTATION
Helping Autonomous Vehicles at Signalized Intersections Ousama Shebeeb, P. Eng. Traffic Signals Engineer Ministry of Transportation of Ontario Paper Prepared for Presentation At the NEXT GENERATION TRANSPORTATION
C H A P T E R S E V E N
 Regional Transportation Plan/Sustainable Communities Strategy C H A P T E R S E V E N T E C H N O L O G I C A L I N N O V A T I O N S Page intentionally left blank S E V E N Innovations in Technology Photo
Regional Transportation Plan/Sustainable Communities Strategy C H A P T E R S E V E N T E C H N O L O G I C A L I N N O V A T I O N S Page intentionally left blank S E V E N Innovations in Technology Photo
Automated Vehicles: Perspectives from Canadian vehicle OEMs. CCMTA Annual Meeting Toronto, ON May 25, 2014
 Automated Vehicles: Perspectives from Canadian vehicle OEMs CCMTA Annual Meeting Toronto, ON May 25, 2014 Overview 1. Our membership 2. Automated vs. autonomous vehicles Levels of automation 3. Technology
Automated Vehicles: Perspectives from Canadian vehicle OEMs CCMTA Annual Meeting Toronto, ON May 25, 2014 Overview 1. Our membership 2. Automated vs. autonomous vehicles Levels of automation 3. Technology
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE. CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development
 AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
2016 Congestion Report
 2016 Congestion Report Metropolitan Freeway System May 2017 2016 Congestion Report 1 Table of Contents Purpose and Need...3 Introduction...3 Methodology...4 2016 Results...5 Explanation of Percentage Miles
2016 Congestion Report Metropolitan Freeway System May 2017 2016 Congestion Report 1 Table of Contents Purpose and Need...3 Introduction...3 Methodology...4 2016 Results...5 Explanation of Percentage Miles
TOWARDS ACCIDENT FREE DRIVING
 ETSI SUMMIT: 5G FROM MYTH TO REALITY TOWARDS ACCIDENT FREE DRIVING Niels Peter Skov Andersen, General Manager Car 2 Car Communication Consortium All rights reserved How do we stop the cars colliding First
ETSI SUMMIT: 5G FROM MYTH TO REALITY TOWARDS ACCIDENT FREE DRIVING Niels Peter Skov Andersen, General Manager Car 2 Car Communication Consortium All rights reserved How do we stop the cars colliding First
The Role of Intelligent Transport Systems in Road Safety and Logistics
 The Role of Intelligent Transport Systems in Road Safety and Logistics Mike van Tonder Aurecon and President ITS SA PRESENTATION CONTENT 1. What are Intelligent Transport Systems (ITS)? 2. What Types of
The Role of Intelligent Transport Systems in Road Safety and Logistics Mike van Tonder Aurecon and President ITS SA PRESENTATION CONTENT 1. What are Intelligent Transport Systems (ITS)? 2. What Types of
C-ITS in Taiwan. Michael Li
 C-ITS in Taiwan Michael Li (hhli@itri.org.tw) Deputy Division Director Division for Telematics and Vehicular Control System Information and Communication Lab. (ICL) Industrial Technology Research Institute
C-ITS in Taiwan Michael Li (hhli@itri.org.tw) Deputy Division Director Division for Telematics and Vehicular Control System Information and Communication Lab. (ICL) Industrial Technology Research Institute
Self-Driving Vehicles in the Park
 Self-Driving Vehicles in the Park Bryant Walker Smith Center for Internet and Society Center for Automotive Research cyberlaw.stanford.edu/about/people/bryant-walker-smith 1 A robot by any other name Self-driving
Self-Driving Vehicles in the Park Bryant Walker Smith Center for Internet and Society Center for Automotive Research cyberlaw.stanford.edu/about/people/bryant-walker-smith 1 A robot by any other name Self-driving
STRATEGIC PRIORITIES AND POLICY COMMITTEE MAY 5, 2016
 STRATEGIC PRIORITIES AND POLICY COMMITTEE MAY 5, 2016 Shift Rapid Transit Initiative Largest infrastructure project in the city s history. Rapid Transit initiative will transform London s public transit
STRATEGIC PRIORITIES AND POLICY COMMITTEE MAY 5, 2016 Shift Rapid Transit Initiative Largest infrastructure project in the city s history. Rapid Transit initiative will transform London s public transit
Connected & Autom ated Vehicle Support Activities
 Michiga n DOT Connected & Autom ated Vehicle Support Activities Collin Cas tle (MDOT) 2017 Wisconsin ITS Forum Novem ber 8 th 2017 Michigan Traffic Fatalities 1300 1200 1100 Fatalities 1000 900 800 700
Michiga n DOT Connected & Autom ated Vehicle Support Activities Collin Cas tle (MDOT) 2017 Wisconsin ITS Forum Novem ber 8 th 2017 Michigan Traffic Fatalities 1300 1200 1100 Fatalities 1000 900 800 700
Beth Kigel. Florida Transportation Commissioner. Florida s Smart Future: Innovation in Policy and Technology Planning
 Beth Kigel Florida Transportation Commissioner Florida s Smart Future: Innovation in Policy and Technology Planning A perspective of Florida s growth Key Statistics: Additional 6 million residents by 2030
Beth Kigel Florida Transportation Commissioner Florida s Smart Future: Innovation in Policy and Technology Planning A perspective of Florida s growth Key Statistics: Additional 6 million residents by 2030
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS
 ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS Bill Visnic Editorial Director, Mobility Media 2017 FAV Summit ACES Policies and Standards Breakout Session Wednesday,
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS Bill Visnic Editorial Director, Mobility Media 2017 FAV Summit ACES Policies and Standards Breakout Session Wednesday,
Development of California Regulations for Testing and Operation of Automated Driving Systems
 Development of California Regulations for Testing and Operation of Automated Driving Systems Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California,
Development of California Regulations for Testing and Operation of Automated Driving Systems Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California,
Operating Toll Facilities in a CAV World, Are We Prepared?
 Operating Toll Facilities in a CAV World, Are We Prepared? 1 2 Yesterday vs. Today 3 CAVs Existing Vehicle Market Image Source: NHTSA s Vehicle Shoppers Guide (on) Driver Assistance Technologies https://www.nhtsa.gov/document/driver-assistance-technologies-vehicle-shoppers-guide
Operating Toll Facilities in a CAV World, Are We Prepared? 1 2 Yesterday vs. Today 3 CAVs Existing Vehicle Market Image Source: NHTSA s Vehicle Shoppers Guide (on) Driver Assistance Technologies https://www.nhtsa.gov/document/driver-assistance-technologies-vehicle-shoppers-guide
Our Approach to Automated Driving System Safety. February 2019
 Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF
 AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
ITS TEXAS Connected Vehicles: ITS Implications Short and Long Term
 ITS TEXAS 2015 Connected Vehicles: ITS Implications Short and Long Term Thomas J. Bamonte Assistant Executive Director, Strategy & Innovation North Texas Tollway Authority Twitter: @TomBamonte November
ITS TEXAS 2015 Connected Vehicles: ITS Implications Short and Long Term Thomas J. Bamonte Assistant Executive Director, Strategy & Innovation North Texas Tollway Authority Twitter: @TomBamonte November
CONNECTED AND AUTOMATED TRANSPORTATION AND THE TEXAS AV PROVING GROUNDS PARTNERSHIP
 CONNECTED AND AUTOMATED TRANSPORTATION AND THE TEXAS AV PROVING GROUNDS PARTNERSHIP Christopher Poe, Ph.D., P.E. Assistant Director, Connected and Automated Transportation Strategy Texas A&M Transportation
CONNECTED AND AUTOMATED TRANSPORTATION AND THE TEXAS AV PROVING GROUNDS PARTNERSHIP Christopher Poe, Ph.D., P.E. Assistant Director, Connected and Automated Transportation Strategy Texas A&M Transportation
Towards Realizing Autonomous Driving Based on Distributed Decision Making for Complex Urban Environments
 Towards Realizing Autonomous Driving Based on Distributed Decision Making for Complex Urban Environments M.Sc. Elif Eryilmaz on behalf of Prof. Dr. Dr. h.c. Sahin Albayrak Digital Mobility Our vision Intelligent
Towards Realizing Autonomous Driving Based on Distributed Decision Making for Complex Urban Environments M.Sc. Elif Eryilmaz on behalf of Prof. Dr. Dr. h.c. Sahin Albayrak Digital Mobility Our vision Intelligent
Variable Speed Limit Pilot Project in BC
 Variable Speed Limit Pilot Project in BC Road Safety Engineering Award Nomination Project Description and Road Safety Benefits British Columbia is unique in its challenges. The highways network has more
Variable Speed Limit Pilot Project in BC Road Safety Engineering Award Nomination Project Description and Road Safety Benefits British Columbia is unique in its challenges. The highways network has more
A Roadmap for Connected Vehicle Deployment in California (Draft) Benjamin McKeever, P.E. December 15, 2016
 Benjamin McKeever, P.E. December 15, 2016") A Roadmap for Connected Vehicle Deployment in California (Draft) Benjamin McKeever, P.E. December 15, 2016 The following roadmap has been developed for Caltrans to help guide the actions needed to ensure
A Roadmap for Connected Vehicle Deployment in California (Draft) Benjamin McKeever, P.E. December 15, 2016 The following roadmap has been developed for Caltrans to help guide the actions needed to ensure
Efficient, intelligent, autonomous Applying low emission vehicles
 Efficient, intelligent, autonomous Applying low emission vehicles Transport and Climate Summit Thursday, 9 th February 2017 Dublin Castle Gloria Esposito, Head of Projects Low Carbon Low Vehicle Partnership
Efficient, intelligent, autonomous Applying low emission vehicles Transport and Climate Summit Thursday, 9 th February 2017 Dublin Castle Gloria Esposito, Head of Projects Low Carbon Low Vehicle Partnership
Co-operative ITS (C-ITS): Current State & Evolution Prospect
: Current State & Evolution Prospect") Co-operative ITS (C-ITS): Current State & Evolution Prospect Mai 2013 GENERAL PRINCIPLES V2V Use Local Standard Ad-Hoc networks (WiFi extension: IEEE 802.11p / G5) Use a dedicated Frequency Spectrum V2I
Co-operative ITS (C-ITS): Current State & Evolution Prospect Mai 2013 GENERAL PRINCIPLES V2V Use Local Standard Ad-Hoc networks (WiFi extension: IEEE 802.11p / G5) Use a dedicated Frequency Spectrum V2I
CSE 352: Self-Driving Cars. Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark
 CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
Autonomous Vehicle Implementation Predictions Implications for Transport Planning
 Autonomous Vehicle Implementation Predictions Implications for Transport Planning Todd Litman Victoria Transport Policy Institute Workshop 188 Activity-Travel Behavioral Impacts and Travel Demand Modeling
Autonomous Vehicle Implementation Predictions Implications for Transport Planning Todd Litman Victoria Transport Policy Institute Workshop 188 Activity-Travel Behavioral Impacts and Travel Demand Modeling
eyes-off until the driver (or the vehicle) decides that it s time for the driver to resume control.
 decides that it s time for the driver to resume control.") Remarks for NHTSA Chief Counsel Kevin Vincent DRI s Strictly Automotive Seminar: Are Smart Cars Really Smarter? The Dearborn Inn - Dearborn, MI Thursday, September 19, 2013 Good morning. Thank you for
Remarks for NHTSA Chief Counsel Kevin Vincent DRI s Strictly Automotive Seminar: Are Smart Cars Really Smarter? The Dearborn Inn - Dearborn, MI Thursday, September 19, 2013 Good morning. Thank you for