SuperQuest Salem Arms Best Practices
|
|
|
- Thomasine Fox
- 5 years ago
- Views:
Transcription



1 SuperQuest Salem Arms Best Practices

2 VEX Arm Designs Single 4-Bar 6-Bar 8-Bar Linear Slide Scissor Double Reverse 4-Bar

3 Single Arms Arms These manipulators consist of a pivot point and at least 1 motor. Arms can be single and supported on each side by a tower Arms are levers, the closer the pivot point is to the end of the arm, the longer the arm, and larger the load the more torque is required to lift it. Torque is usually the most difficult thing to overcome when designing an arm.

4 Simple Arm Pros and Cons Advantages Lifts an object from the field surface. Relatively easy to design and construct. Can be designed to pivot from one side of the robot, over the top to the other sided of the robot. Disadvantages Easy to create a design with a high to very high torque situation which can lead to broken drive shafts, stripped gears, broken drive chains, stripped lock plates, etc. Back dive when not powered Creates a higher center of gravity when lifted. The object being picked up maintains its orientation with the arm as it arcs up and may not be aligned with the final manipulation goal. Summary: A great first arm that can be enhanced with gatherers.


5 Four-Bar Linkage Usually the four structures consist of a tower, two arms, and a hand. Creates a parallelogram The closer the linkages are to one another the less they can pivot.

6 Four-Bar Linkages Pros and Cons Advantages The orientation of an object can be changed in respect to the arm as it is pivoted up. Elastic forces can be added between the linkages to reduce the amount of force the activator needs to apply. Disadvantages Easy to create a design with a high to very high torque situation Back dive when not powered Can not rotate from one side of the robot over to the other side. Creates a higher center of gravity when lifted Summary: A good option that keeps the orientation of the hand, but limited by how high you can reach.
 Upper Arm Six-Bar Linkage 4) Mid Tower 2) Long Arm Gear")
 End Tower: Usually part of the hand.")
7 Hinge Connection. Usually with axle or loose screw. 5) Upper Arm Six-Bar Linkage 4) Mid Tower 2) Long Arm Gear connected to Long Arm. Can also use a sprocket. 6) End Tower: Usually part of the hand. 1) Tower structure connected to the base 3) Shorter Lower Arm


8 Six-Bar Linkages Pros and Cons Advantages The orientation of an object can be changed in respect to the arm as it is pivoted up. Elastic forces can be added between the linkages to reduce the amount of force the activator needs to apply. Disadvantages Easy to create a design with a high to very high torque situation Back dive. The amount of pivot is limited by the distance between the arms. Can not rotate from one side of the robot over to the other side. Creates a changing and higher center of gravity when lifted Summary: A four-bar linkage on steriods. You can lift higher, but it is a bit more complex to build

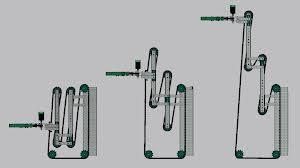
9 8-Bar Linkage A Six-Bar Linkage on Steroids

10 8-Bar Sample

11 Linear Slide Linear slides The VEX design system provides two types of linear slides in the linear motion kit. The linear motion kit provides inside and outside Delrin slide trucks which can slide up and down the linear slide track. The old linear slides are two metal slide members (an outside and an inside) which slide over one another. Both make excellent linear lifts. You can use a motor with rack and pinion, or chain or rope to move the slide.
12 Linear Slide Extension Lifts Single Stage Chain Lift The motor rotates the chain. The linear slide is attached to the chain. The linear slide is pulled up and down by the chain. Cable tie chain to the bottom of the linear slide. driven sprocket
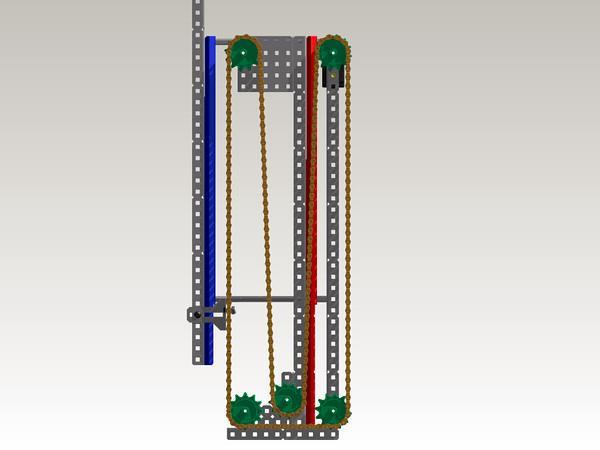
13 Animation
14 Extension Lift Considerations Best if powered up AND down If not, make sure to add a device to take up the slack if it jams Segments need to move freely Need to be able to adjust chain/cable lengths. Minimize slop/ free-play Maximize segment overlap 20% minimum more for bottom, less for top Stiffness is as important as strength Minimize weight, especially at the top

15 Linear Slide Pros and Cons Advantages Very effective linear lift from floor surface. Linear motion kit has very little sliding friction. Takes up little volume on the robot. You can add stages to increase the distance the slide can travel. Disadvantages The gear teeth on plastic racks can strip. Creates a higher center of gravity when lifted Difficult to build and keep friction down. Summary: Can be tricky to limit the friction, but gives the advantage of lifting straight up and taking up little room.
16 motor Extension Lifts Rack & Pinion The rack is attached to one linear slide. The pinion (driven gear) is attached to the other slide The driven gear must be mounted where the linear slides always overlap. driven sprocket mount the motor bracket where the linear slides always overlap


17 Rack & Pinion Lift Lab Rats 2008 Bridge Battle Robot posted on by 1885.blake
18 Scissor Lifts When the bottom of the scissors is pulled together it extends upwards. In this example a rack and pinion pulls the bottom of the scissors together. driven gear

19 Scissors Lift posted on by corpralchee from FVC Team 38
20 Scissor Lift Considerations Advantages Minimum retracted height - can go under field barriers Disadvantages Tends to be heavy to be stable enough Doesn t deal well with side loads Must be built very precisely Stability decreases as height increases Loads very high to raise at beginning of travel


21 Scissor Lift Example Rack and Pinion for lifting


22 Scissor Lift Example Motors move the base which moves the arms.


23 Scissor Lift
24 Scissor Lift Pros and Cons Advantages Can expand a great distance for very little linear motion. Can be expanded horizontally as well as vertically. Elastic forces can be used to expand the lift. Disadvantages Complex The further apart the legs and the lower the center hinge point, the more force is required to lift the structure. Scissor lift systems must be well designed or they will bind. Scissor lifts take up a great deal of volume on a robot. Creates a higher center of gravity when lifted. Summary: The Great Tormentor! Great on paper, can be difficult to implement with multiple stages.

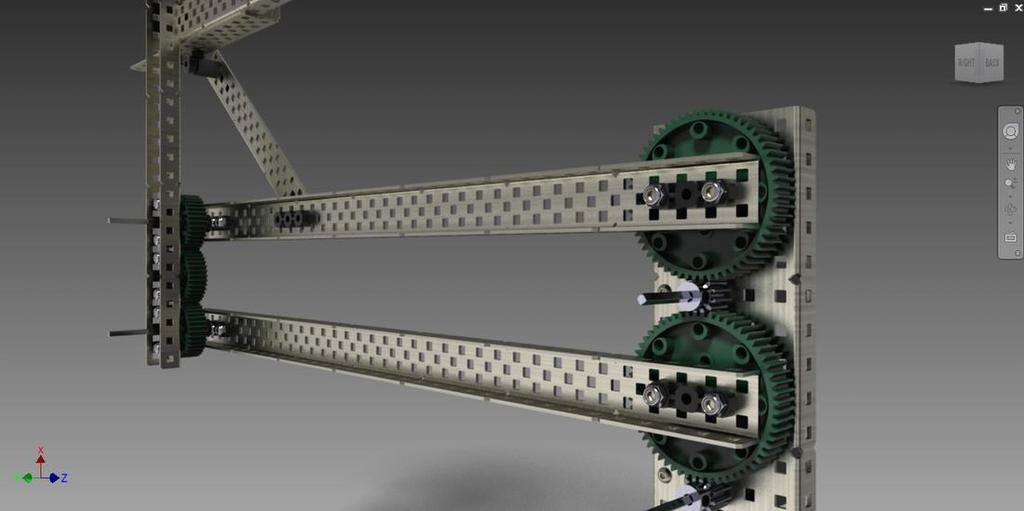
25 Double Reverse 4-Bar


26 Double Reverse 4-Bar
SuperQuest Salem Drive Train Best Practices
 SuperQuest Salem Drive Train Best Practices Drive Trains Design Hints Compare different designs Look at examples from Worlds Tips for Drive Systems Always support drive shafts on two points (gears, sprockets,
SuperQuest Salem Drive Train Best Practices Drive Trains Design Hints Compare different designs Look at examples from Worlds Tips for Drive Systems Always support drive shafts on two points (gears, sprockets,
Andy Baker Mech. Engineering Mentor: 45 (1998-present) President and Co-owner: AndyMark, Inc Championship Woodie Flowers Award
 President and Co-owner: AndyMark, Inc Championship Woodie Flowers Award") Andy Baker Mech. Engineering Mentor: 45 (1998-present) President and Co-owner: AndyMark, Inc. 2003 Championship Woodie Flowers Award Articulating Arms Telescoping Lifts Grippers Latches Turrets Ball Handling
Andy Baker Mech. Engineering Mentor: 45 (1998-present) President and Co-owner: AndyMark, Inc. 2003 Championship Woodie Flowers Award Articulating Arms Telescoping Lifts Grippers Latches Turrets Ball Handling
Manipulators for FIRST FRC Robotics
 Manipulators for FIRST FRC Robotics FIRST Fare 2017 Bruce Whitefield Mentor, Team 2471 Manipulate What? Game pieces come in many sizes and shapes Manipulate How? Game objectives change each year Lift Dump
Manipulators for FIRST FRC Robotics FIRST Fare 2017 Bruce Whitefield Mentor, Team 2471 Manipulate What? Game pieces come in many sizes and shapes Manipulate How? Game objectives change each year Lift Dump
Manipulators. Basic/Background Info Types of Manipulators General Manipulator design tips
 FTC Manipulators By: Zach Zakfeld (Enigma Robotics) Teams: FTC 5391, FTC 5385 and FRC 2075 *Some images in this presentation are of FRC robots so exact designs may not be applicable, however all of the
FTC Manipulators By: Zach Zakfeld (Enigma Robotics) Teams: FTC 5391, FTC 5385 and FRC 2075 *Some images in this presentation are of FRC robots so exact designs may not be applicable, however all of the
Lifting Mechanisms. Example 1: Two Stage Lift
 Lifting Mechanisms The primary scoring method for the 2018 game is to deposit fuel cubes into scoring zones. A manipulator fixed to your robot can deliver fuel cubes into ground level scoring zones, but
Lifting Mechanisms The primary scoring method for the 2018 game is to deposit fuel cubes into scoring zones. A manipulator fixed to your robot can deliver fuel cubes into ground level scoring zones, but
Moments. It doesn t fall because of the presence of a counter balance weight on the right-hand side. The boom is therefore balanced.
 Moments The crane in the image below looks unstable, as though it should topple over. There appears to be too much of the boom on the left-hand side of the tower. It doesn t fall because of the presence
Moments The crane in the image below looks unstable, as though it should topple over. There appears to be too much of the boom on the left-hand side of the tower. It doesn t fall because of the presence
All levers are one of three types, usually called classes. The class of a lever depends on the relative position of the load, effort and fulcrum:
 Página 66 de 232 Mechanisms A mechanism is simply a device which takes an input motion and force, and outputs a different motion and force. The point of a mechanism is to make the job easier to do. The
Página 66 de 232 Mechanisms A mechanism is simply a device which takes an input motion and force, and outputs a different motion and force. The point of a mechanism is to make the job easier to do. The
Robot Preparation for the VEX World Championship/ US Open. Lessons learned over the past 6 years by David Kelly 2013 VWC, Teacher of the Year
 Robot Preparation for the VEX World Championship/ US Open Lessons learned over the past 6 years by David Kelly 2013 VWC, Teacher of the Year Re-designing Re-designing your robot to a new concept yields
Robot Preparation for the VEX World Championship/ US Open Lessons learned over the past 6 years by David Kelly 2013 VWC, Teacher of the Year Re-designing Re-designing your robot to a new concept yields
Solar Car Suspension Design Considerations for achieving an efficient and stable vehicle
 Innovators Educational Foundation Solar Car Suspension Design Considerations for achieving an efficient and stable vehicle Solar Car Conference, February 1-3, 2019 Southern Illinois University, Edwardsville,
Innovators Educational Foundation Solar Car Suspension Design Considerations for achieving an efficient and stable vehicle Solar Car Conference, February 1-3, 2019 Southern Illinois University, Edwardsville,
UNIT 2: MECHANICAL SYSTEMS UNIT NOTEBOOK. SCIENCE 8 Mr. Anderson
 UNIT 2: MECHANICAL SYSTEMS UNIT NOTEBOOK SCIENCE 8 Mr. Anderson Section 1 Notes 1.1 Simple Machines - Meeting Human Needs Machines help people use energy more efficiently. A machine helps us do work. The
UNIT 2: MECHANICAL SYSTEMS UNIT NOTEBOOK SCIENCE 8 Mr. Anderson Section 1 Notes 1.1 Simple Machines - Meeting Human Needs Machines help people use energy more efficiently. A machine helps us do work. The
Week 4: Skipping & Lift Assists
 Week 4: Skipping & Lift Assists Build a lift that can raise and hold 4lbs of sacks 12 off the ground Learn build techniques for lifts Learn gear ratios Learn how to program more than the joystick Topic
Week 4: Skipping & Lift Assists Build a lift that can raise and hold 4lbs of sacks 12 off the ground Learn build techniques for lifts Learn gear ratios Learn how to program more than the joystick Topic
MECHANISMS. AUTHORS: Santiago Camblor y Pablo Rivas INDEX
 MECHANISMS AUTHORS: Santiago Camblor y Pablo Rivas INDEX 1 INTRODUCTION 2 LEVER 3 PULLEYS 4 BELT AND PULLEY SYSTEM 5 GEARS 6 GEARS WITH CHAIN 7 WORM GEAR 8 RACK AND PINION 9 SCREW AND NUT 10 CAM 11 ECCENTRIC
MECHANISMS AUTHORS: Santiago Camblor y Pablo Rivas INDEX 1 INTRODUCTION 2 LEVER 3 PULLEYS 4 BELT AND PULLEY SYSTEM 5 GEARS 6 GEARS WITH CHAIN 7 WORM GEAR 8 RACK AND PINION 9 SCREW AND NUT 10 CAM 11 ECCENTRIC
Mechanisms. Prepared by Juan Blázquez, Alissa Gildemann
 Unit 9 Mechanisms 1. Mechanisms Mechanisms are devices that transmit and convert forces and motions from an input to an output element. They enable us to use less effort to carry out a task. We can classify
Unit 9 Mechanisms 1. Mechanisms Mechanisms are devices that transmit and convert forces and motions from an input to an output element. They enable us to use less effort to carry out a task. We can classify
Transmission systems: Multiple components that have the same type of movement (rotational, linear, etc)
") Transmission systems: Multiple components that have the same type of movement (rotational, linear, etc) Transformation systems: Different components in the system have different types of movement Ex: rotational
Transmission systems: Multiple components that have the same type of movement (rotational, linear, etc) Transformation systems: Different components in the system have different types of movement Ex: rotational
Wheeled Mobile Robots
 Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Bag 1. Bag 1. Center Pivot. Center Pivot
 8 00734 01901 5 Center Pivot Bag 1 3374 - Center Pivot Socket 4019 - Alum Pivot ball 3254-2-56 Button Head *Note - Sometimes it is helpful to slightly over-tighten the top clamp screws, then work the ball
8 00734 01901 5 Center Pivot Bag 1 3374 - Center Pivot Socket 4019 - Alum Pivot ball 3254-2-56 Button Head *Note - Sometimes it is helpful to slightly over-tighten the top clamp screws, then work the ball
structure table of contents: squarebot chassis parts and assembly 2.2 concepts to understand 2.27 subsystems interfaces 2.37
 The structural subsystem of the robot is responsible for physical support. It holds everything in place, and is, in effect, the durable skeleton of the robot to which all the other subsystems are attached.
The structural subsystem of the robot is responsible for physical support. It holds everything in place, and is, in effect, the durable skeleton of the robot to which all the other subsystems are attached.
How to Build with the Mindstorm Kit
 How to Build with the Mindstorm Kit There are many resources available Constructopedias Example Robots YouTube Etc. The best way to learn, is to do Remember rule #1: don't be afraid to fail New Rule: don't
How to Build with the Mindstorm Kit There are many resources available Constructopedias Example Robots YouTube Etc. The best way to learn, is to do Remember rule #1: don't be afraid to fail New Rule: don't
Unit 1: Energy and Motion
 5 5 Table of Contents Unit 1: Energy and Motion Chapter 5: Work and Machines 5.1: Work 5.2: Using Machines 5.3: Simple Machines 5.1 Work What is work? To many people, the word work means something they
5 5 Table of Contents Unit 1: Energy and Motion Chapter 5: Work and Machines 5.1: Work 5.2: Using Machines 5.3: Simple Machines 5.1 Work What is work? To many people, the word work means something they
Mechanisms and Structures. Mechanical Systems. Levers. Basic Forces
 Mechanisms and Structures Mechanical Systems Levers Basic Forces Pupil Name Teacher Class Page 1 MECHANICAL SYSTEMS Our every day lives are made much easier by a variety of mechanical systems that help
Mechanisms and Structures Mechanical Systems Levers Basic Forces Pupil Name Teacher Class Page 1 MECHANICAL SYSTEMS Our every day lives are made much easier by a variety of mechanical systems that help
Unit 1 Introduction to VEX and Robotics
 Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and
Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and
Autodesk's VEX Robotics Curriculum. Unit 14: Accumulator Design
 Autodesk's VEX Robotics Curriculum Unit 14: Accumulator Design 1 Overview In Unit 14: Accumulator Design, you learn about the use and design of accumulators. You design your own accumulator, report on
Autodesk's VEX Robotics Curriculum Unit 14: Accumulator Design 1 Overview In Unit 14: Accumulator Design, you learn about the use and design of accumulators. You design your own accumulator, report on
Work Formula 11/7/16. Work can be calculated by using the following formula: Work=force x distance
 Work is the energy transferred when a force makes an object move In order for work to take place, a force must be exerted through a distance. The amount of work done depends on two things: the amount of
Work is the energy transferred when a force makes an object move In order for work to take place, a force must be exerted through a distance. The amount of work done depends on two things: the amount of
Assembly Manual. 1/10th Formula 1 Car
 Assembly Manual 1/10th Formula 1 Car Center Pivot Bag 1 3374 - Center Pivot Socket 40194 - Hard Anodized Alum Pivot ball 3254-2-56 *Note - Sometimes it is helpful to slightly over-tighten the top clamp
Assembly Manual 1/10th Formula 1 Car Center Pivot Bag 1 3374 - Center Pivot Socket 40194 - Hard Anodized Alum Pivot ball 3254-2-56 *Note - Sometimes it is helpful to slightly over-tighten the top clamp
RAMPAGE POWER LIFT RAMP
 RAMPAGE POWER LIFT RAMP INSTALLATION AND OPERATING INSTRUCTIONS (3/10/07) The Rampage Power Lift Ramp is the fast, easy, and safe way to load a motorcycle into a truck. One person can load or unload a
RAMPAGE POWER LIFT RAMP INSTALLATION AND OPERATING INSTRUCTIONS (3/10/07) The Rampage Power Lift Ramp is the fast, easy, and safe way to load a motorcycle into a truck. One person can load or unload a
Four Wheel Steering Mechanism
 J. Luka Samuel Four Wheel Steering Mechanism G. Yousuf Ch. Shiva Sankar R. Karthik Lal Abstract: The basic aim of steering is to ensure that the wheels are pointing in the desired directions. This is typically
J. Luka Samuel Four Wheel Steering Mechanism G. Yousuf Ch. Shiva Sankar R. Karthik Lal Abstract: The basic aim of steering is to ensure that the wheels are pointing in the desired directions. This is typically
Modular individual transport system
 EN Modular individual transport system The modular, flexible transport solution You are looking for a possibility to move large and heavy loads on a surface in all directions und position them precisely
EN Modular individual transport system The modular, flexible transport solution You are looking for a possibility to move large and heavy loads on a surface in all directions und position them precisely
Deriving Consistency from LEGOs
 Deriving Consistency from LEGOs What we have learned in 6 years of FLL by Austin and Travis Schuh Objectives Basic Building Techniques How to Build Arms and Drive Trains Using Sensors How to Choose a Programming
Deriving Consistency from LEGOs What we have learned in 6 years of FLL by Austin and Travis Schuh Objectives Basic Building Techniques How to Build Arms and Drive Trains Using Sensors How to Choose a Programming
** Please use and understand all required safety procedures for working near and around RF radiating equipment and its various mounting locations.
 CD 7012, ISSUE 2, 08/03/2015 1 ** Please use and understand all required safety procedures for working near and around RF radiating equipment and its various mounting locations. ** This document is informational
CD 7012, ISSUE 2, 08/03/2015 1 ** Please use and understand all required safety procedures for working near and around RF radiating equipment and its various mounting locations. ** This document is informational
Gear Drives. A third gear added to the system will rotate in the same direction as the drive gear Equal diameters = Equal number of teeth = Same speed
 Gear Drive Systems Gear Drives Gear Drive: Synchronous mechanical drive that uses gears to transfer power Gear: A toothed wheel that meshes with other toothed wheels to transfer rotational power Pinion
Gear Drive Systems Gear Drives Gear Drive: Synchronous mechanical drive that uses gears to transfer power Gear: A toothed wheel that meshes with other toothed wheels to transfer rotational power Pinion
FRICTION DEVICES: DYNAMOMETER. Presented by: RONAK D. SONI Assistant Professor Parul Institute of Technology, Parul University
 FRICTION DEVICES: DYNAMOMETER Presented by: RONAK D. SONI Assistant Professor Parul Institute of Technology, Parul University DYNAMOMETER A dynamometer is a brake but in addition it has a device to measure
FRICTION DEVICES: DYNAMOMETER Presented by: RONAK D. SONI Assistant Professor Parul Institute of Technology, Parul University DYNAMOMETER A dynamometer is a brake but in addition it has a device to measure
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Moon Transmission Systems. Def: System has one type of movement rotaon
 Moon Transmission Systems Def: System has one type of movement rotaon Made up of: Driver: Iniates the moon Driven: Receives the moon Intermediate: Found between driver and driven Driver component Driven
Moon Transmission Systems Def: System has one type of movement rotaon Made up of: Driver: Iniates the moon Driven: Receives the moon Intermediate: Found between driver and driven Driver component Driven
Conceptual Design Presenta2on. ME 4182 Team: Guys Engineering Nathan Besse*e, Rahul Bha/a, Andrew Cass, Zeeshan Saiyed, Glen Stewart YJ Chok
 Conceptual Design Presenta2on ME 4182 Team: 5 + 1 Guys Engineering Nathan Besse*e, Rahul Bha/a, Andrew Cass, Zeeshan Saiyed, Glen Stewart YJ Chok Automa/c White Board Wiper Last Time Presented Revisions
Conceptual Design Presenta2on ME 4182 Team: 5 + 1 Guys Engineering Nathan Besse*e, Rahul Bha/a, Andrew Cass, Zeeshan Saiyed, Glen Stewart YJ Chok Automa/c White Board Wiper Last Time Presented Revisions
Base Kit Chain Drivetrain Build Guide
 222fg Base Kit Chain Drivetrain Build Guide August 11, 2017 Chain Drivetrain Build Guide Copyright 2017 REV Robotics, LLC 1 1.1 Description This document outlines the steps required to four wheel, chain
222fg Base Kit Chain Drivetrain Build Guide August 11, 2017 Chain Drivetrain Build Guide Copyright 2017 REV Robotics, LLC 1 1.1 Description This document outlines the steps required to four wheel, chain
Hydraulic Pet (racer)
") Remote Controlled Hydraulic Pet (Racer) Activity Hydraulic Pet (racer) Activity Guide Page 1 Name: Set: Date: Warning: CHOKING HAZARD Small Parts. Not for Children Under 3 yrs. Page 2 Components These
Remote Controlled Hydraulic Pet (Racer) Activity Hydraulic Pet (racer) Activity Guide Page 1 Name: Set: Date: Warning: CHOKING HAZARD Small Parts. Not for Children Under 3 yrs. Page 2 Components These
The Car Tutorial Part 2 Creating a Racing Game for Unity
 The Car Tutorial Part 2 Creating a Racing Game for Unity Part 2: Tweaking the Car 3 Center of Mass 3 Suspension 5 Suspension range 6 Suspension damper 6 Drag Multiplier 6 Speed, turning and gears 8 Exporting
The Car Tutorial Part 2 Creating a Racing Game for Unity Part 2: Tweaking the Car 3 Center of Mass 3 Suspension 5 Suspension range 6 Suspension damper 6 Drag Multiplier 6 Speed, turning and gears 8 Exporting
Steering and Suspension
 The Steering and Suspension system is engineered to allow the vehicle to turn and absorb road irregularities. The suspension is comprised of springs, suspension arms or links and shock dampers. These components
The Steering and Suspension system is engineered to allow the vehicle to turn and absorb road irregularities. The suspension is comprised of springs, suspension arms or links and shock dampers. These components
motion table of contents: squarebot assembly 3.2 concepts to understand 3.3 subsystems interfaces 3.21 motion subsystem inventory 3.
 The subsystem of the robot is responsible for exactly that,. It includes both the motors that generate, and the wheels and gears that transfer and transform that into the desired forms. With the structural
The subsystem of the robot is responsible for exactly that,. It includes both the motors that generate, and the wheels and gears that transfer and transform that into the desired forms. With the structural
Robot Construction, Wiring, and Safety
 Robot Construction, Wiring, and Safety SSI Robotics September 7, 2013 Capitol College Basic construction Build it strong Build it stable Build it to last Protect sensitive parts Gearing Make motors do
Robot Construction, Wiring, and Safety SSI Robotics September 7, 2013 Capitol College Basic construction Build it strong Build it stable Build it to last Protect sensitive parts Gearing Make motors do
LEGO Parts Guide. Naming and Building with LEGO parts. Version 1.3 4/12/10
 LEGO Parts Guide Naming and Building with LEGO parts Version 1.3 4/12/10 Table of Contents Connectors... 4 Friction Pegs... 4 Frictionless Pegs... 5 Ball Joints / Tie Rods... 6 Bushings... 7 Angle Connectors...
LEGO Parts Guide Naming and Building with LEGO parts Version 1.3 4/12/10 Table of Contents Connectors... 4 Friction Pegs... 4 Frictionless Pegs... 5 Ball Joints / Tie Rods... 6 Bushings... 7 Angle Connectors...
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Swerve Drive Selection Process. Cyber Blue 234 OCTOBER 2010 / Indiana Forums
 Swerve Drive Selection Process Cyber Blue 234 OCTOBER 2010 / Indiana Forums Background Cyber Blue had discussed wanting to try an omni-directional drive system for many years Recognized need for a lot
Swerve Drive Selection Process Cyber Blue 234 OCTOBER 2010 / Indiana Forums Background Cyber Blue had discussed wanting to try an omni-directional drive system for many years Recognized need for a lot
Assembly Manual. 1/10th World GT car
 Assembly Manual 1/10th World GT car Center Pivot Bag 1 3374 - Center Pivot Socket 40194 - Hard Anodized Alum Pivot ball 3254-2-56 Button Head *Note - Sometimes it is helpful to slightly over-tighten the
Assembly Manual 1/10th World GT car Center Pivot Bag 1 3374 - Center Pivot Socket 40194 - Hard Anodized Alum Pivot ball 3254-2-56 Button Head *Note - Sometimes it is helpful to slightly over-tighten the
Gear Ratios and Speed Background Material
 VEX Robotics Lab 3 How Do Gear Ratios Affect and Torque? Introduction In this investigation, students will learn the relationships between gear ratio, axle speed, and torque. Students will use the Vex
VEX Robotics Lab 3 How Do Gear Ratios Affect and Torque? Introduction In this investigation, students will learn the relationships between gear ratio, axle speed, and torque. Students will use the Vex
MECHANISM: TRANSMISSION THE TYPE OF INPUT MOVEMENT IS THE SAME AS THE OUTPUT TRANSFORMATION THE MECHANISM TRANSFORMS THE TYPE OF MOVEMENT
 MECHANISM: The mechanisms are elements intended to transmit and transform forces and movements from an INPUT element (motor) to an OUTPUT element. Types of movements: Rotary Motion -this is motion in a
MECHANISM: The mechanisms are elements intended to transmit and transform forces and movements from an INPUT element (motor) to an OUTPUT element. Types of movements: Rotary Motion -this is motion in a
Radius of Wheel Radius of Axle. Ideal Mechanical Advantage =
 Simple Machines Wheels and Pulleys Wheels and Axles have been used for thousands of years. Two ways that s wheels and axels help work: 1. Buy reducing the amount of surface in contact and lowers friction
Simple Machines Wheels and Pulleys Wheels and Axles have been used for thousands of years. Two ways that s wheels and axels help work: 1. Buy reducing the amount of surface in contact and lowers friction
FUSELAGE ASSEMBLY SECOND SECTION (of three)
") FUSELAGE ASSEMBLY SECOND SECTION (of three) 1 FRONT FLOOR ASSEMBLY The front floor assembly is fabricated from three pieces of the two ply pre-pregnated panel material supplied. The basic floor panel and
FUSELAGE ASSEMBLY SECOND SECTION (of three) 1 FRONT FLOOR ASSEMBLY The front floor assembly is fabricated from three pieces of the two ply pre-pregnated panel material supplied. The basic floor panel and
Summary. chain. the two meet in. for traffic. to move on. 750 tons. The word. bridge balances on. a trunnion (the same. things used through the
 The Mag Mile and Torque Chicago River Classroom Activity Summary Students learn about gears and torque. They then build a model of the Michigan Avenue Bridge gears and calculate the increased torque provided
The Mag Mile and Torque Chicago River Classroom Activity Summary Students learn about gears and torque. They then build a model of the Michigan Avenue Bridge gears and calculate the increased torque provided
STEERING SYSTEM Introduction
 STEERING SYSTEM Introduction The steering makes it possible to change direction. The steering must be reliable and safe; there must not be too much play in the steering. It must be possible to steer accurately.
STEERING SYSTEM Introduction The steering makes it possible to change direction. The steering must be reliable and safe; there must not be too much play in the steering. It must be possible to steer accurately.
Basic Animation Mechanisms Obtained From
 http://www.scaryguys.com/mech.htm Basic Animation Mechanisms Here's an overview of several different types of animation mechanisms that are useful for haunted prop use. This is not all the possible mechanisms,
http://www.scaryguys.com/mech.htm Basic Animation Mechanisms Here's an overview of several different types of animation mechanisms that are useful for haunted prop use. This is not all the possible mechanisms,
SAE Mini BAJA: Suspension and Steering
 SAE Mini BAJA: Suspension and Steering By Zane Cross, Kyle Egan, Nick Garry, Trevor Hochhaus Team 11 Progress Report Submitted towards partial fulfillment of the requirements for Mechanical Engineering
SAE Mini BAJA: Suspension and Steering By Zane Cross, Kyle Egan, Nick Garry, Trevor Hochhaus Team 11 Progress Report Submitted towards partial fulfillment of the requirements for Mechanical Engineering
Working with VEX Parts
 VEX Robotics Design System VEX Classroom Lab Kit The VEX Robotics Design System is divided up into several different Subsystems: Structure Subsystem Motion Subsystem Power Subsystem Sensor Subsystem Logic
VEX Robotics Design System VEX Classroom Lab Kit The VEX Robotics Design System is divided up into several different Subsystems: Structure Subsystem Motion Subsystem Power Subsystem Sensor Subsystem Logic
Foundations of Physical Science. Unit 2: Work and Energy
 Foundations of Physical Science Unit 2: Work and Energy Chapter 4: Machines and Mechanical Systems 4.1 Force and Machines 4.2 The Lever 4.3 Designing Gear Machines Learning Goals Describe and explain a
Foundations of Physical Science Unit 2: Work and Energy Chapter 4: Machines and Mechanical Systems 4.1 Force and Machines 4.2 The Lever 4.3 Designing Gear Machines Learning Goals Describe and explain a
Different types of gears. Spur gears. Idler gears. Worm gears. Bevel gears. Belts & Pulleys
 GEARS Robot Gears By using different gear diameters, you can exchange between rotational (or translation) velocity and torque. by looking at the motor datasheet you can determine the output velocity and
GEARS Robot Gears By using different gear diameters, you can exchange between rotational (or translation) velocity and torque. by looking at the motor datasheet you can determine the output velocity and
MECHANICAL SYSTEMS - Reference Page
 ANSWER KEY Student Class MECHANICAL SYSTEMS - Reference Page Refer to the following Formulas that you may need to use throughout this exam Science I n Action 8 Mechanical Systems UNIT Test Numerical Response
ANSWER KEY Student Class MECHANICAL SYSTEMS - Reference Page Refer to the following Formulas that you may need to use throughout this exam Science I n Action 8 Mechanical Systems UNIT Test Numerical Response
Hoisting Equipment Rack & Pinion jacks
 Steel jack acc. to DIN 7355 model SJ 1500-10000 Mechanical steel jacks can basically be used to lift almost all kinds of loads in maintenance and repair, ship building, construction as well as agriculture.
Steel jack acc. to DIN 7355 model SJ 1500-10000 Mechanical steel jacks can basically be used to lift almost all kinds of loads in maintenance and repair, ship building, construction as well as agriculture.
Driver Driven. InputSpeed. Gears
 Gears Gears are toothed wheels designed to transmit rotary motion and power from one part of a mechanism to another. They are fitted to shafts with special devices called keys (or splines) that ensure
Gears Gears are toothed wheels designed to transmit rotary motion and power from one part of a mechanism to another. They are fitted to shafts with special devices called keys (or splines) that ensure
SD Bendix ASA-5 Automatic Slack Adjuster DESCRIPTION OPERATION BRAKE APPLICATION GENERAL
 SD-05-1269 Bendix ASA-5 Automatic Slack Adjuster DESCRIPTION The Bendix ASA 5 automatic slack adjuster is designed for use on cam actuated drum brakes of the type in use on most highway vehicles. Like
SD-05-1269 Bendix ASA-5 Automatic Slack Adjuster DESCRIPTION The Bendix ASA 5 automatic slack adjuster is designed for use on cam actuated drum brakes of the type in use on most highway vehicles. Like
Product design: Mechanical systems
 Product design: Mechanical systems Recall Mechanisms can: change direction of movement, e.g. from clockwise to anticlockwise or from horizontal to vertical; change type of movement, e.g. from rotating
Product design: Mechanical systems Recall Mechanisms can: change direction of movement, e.g. from clockwise to anticlockwise or from horizontal to vertical; change type of movement, e.g. from rotating
Fundamentals of Steering Systems ME5670
 Fundamentals of Steering Systems ME5670 Class timing Monday: 14:30 Hrs 16:00 Hrs Thursday: 16:30 Hrs 17:30 Hrs Lecture 3 Thomas Gillespie, Fundamentals of Vehicle Dynamics, SAE, 1992. http://www.me.utexas.edu/~longoria/vsdc/clog.html
Fundamentals of Steering Systems ME5670 Class timing Monday: 14:30 Hrs 16:00 Hrs Thursday: 16:30 Hrs 17:30 Hrs Lecture 3 Thomas Gillespie, Fundamentals of Vehicle Dynamics, SAE, 1992. http://www.me.utexas.edu/~longoria/vsdc/clog.html
Contents. Overview Pinsetter Orientation...1-4
 Contents Overview...1-3 Pinsetter Orientation...1-4 Pinsetter Description...1-5 Ball Pit...1-5 Ball Cushion...1-5 Transport Band...1-7 Ball Accelerator...1-8 Pin Elevator...1-10 Distributor...1-14 Setting
Contents Overview...1-3 Pinsetter Orientation...1-4 Pinsetter Description...1-5 Ball Pit...1-5 Ball Cushion...1-5 Transport Band...1-7 Ball Accelerator...1-8 Pin Elevator...1-10 Distributor...1-14 Setting
OHIO University Mechanical Engineering Concept Design Foot Powered Wheelchair Team B-Ballin
 OHIO University Mechanical Engineering Concept Design Foot Powered Wheelchair Team B-Ballin Andy Fay Evan Gilliland Sam Hallam Haowen Huo Trace Lydick Kyle Sullivan 11/11/2011 1.0 Concept Generation 1.1
OHIO University Mechanical Engineering Concept Design Foot Powered Wheelchair Team B-Ballin Andy Fay Evan Gilliland Sam Hallam Haowen Huo Trace Lydick Kyle Sullivan 11/11/2011 1.0 Concept Generation 1.1
SPEED ROLLER. Parts and Service Manual. Made with Pride in the USA
 SPEED ROLLER Parts and Service Manual Model SR-103-HS I Made with Pride in the USA otiose wham N NN Diversified Manufacturing, Incorporated 410 Ohio Street Lockport, NY 14094 USA 1.800.777.2936 fax 1.716.434.1757
SPEED ROLLER Parts and Service Manual Model SR-103-HS I Made with Pride in the USA otiose wham N NN Diversified Manufacturing, Incorporated 410 Ohio Street Lockport, NY 14094 USA 1.800.777.2936 fax 1.716.434.1757
1. Remove the stock linkage and the stock column shift lever by driving the pin out.
 Installation Instructions lndy Pickup 3-Speed Shifter Fits 1963-Later GM & Ford 2WD Pick Up w/ Ford, Saginaw, Muncie, and Tremec Transmissions Catalog # 5010016 WORK SAFELY! For maximum safety, perform
Installation Instructions lndy Pickup 3-Speed Shifter Fits 1963-Later GM & Ford 2WD Pick Up w/ Ford, Saginaw, Muncie, and Tremec Transmissions Catalog # 5010016 WORK SAFELY! For maximum safety, perform
USER S MANUAL CAUTION. Visit our website at. new products, prizes, fitness tips, and much more!
 Patent Pending Model No. 831.159730 Serial No. The serial number is found in the location shown below. Write the serial number in the space above. USER S MANUAL Serial Number Decal SEARS, ROEBUCK AND CO.
Patent Pending Model No. 831.159730 Serial No. The serial number is found in the location shown below. Write the serial number in the space above. USER S MANUAL Serial Number Decal SEARS, ROEBUCK AND CO.
Fisher 657 Diaphragm Actuator Sizes and 87
 Instruction Manual 657 Actuator (30-70 and 87) Fisher 657 Diaphragm Actuator Sizes 30 70 and 87 Contents Introduction... 1 Scope of Manual... 1 Description... 2 Specifications... 2 Installation... 3 Mounting
Instruction Manual 657 Actuator (30-70 and 87) Fisher 657 Diaphragm Actuator Sizes 30 70 and 87 Contents Introduction... 1 Scope of Manual... 1 Description... 2 Specifications... 2 Installation... 3 Mounting
Introduction to Robotics
 Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Research Center Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7,
Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Research Center Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7,
Applications in Design & Engine. Analyzing Compound, Robotic Machines
 v2.1 Compound Machines ering Applications in Design & Engine Analyzing Compound, Robotic Machines Educational Objectives At the conclusion of this lesson, students should be able to: Understand the relationship
v2.1 Compound Machines ering Applications in Design & Engine Analyzing Compound, Robotic Machines Educational Objectives At the conclusion of this lesson, students should be able to: Understand the relationship
CHAPTER 6 GEARS CHAPTER LEARNING OBJECTIVES
 CHAPTER 6 GEARS CHAPTER LEARNING OBJECTIVES Upon completion of this chapter, you should be able to do the following: Compare the types of gears and their advantages. Did you ever take a clock apart to
CHAPTER 6 GEARS CHAPTER LEARNING OBJECTIVES Upon completion of this chapter, you should be able to do the following: Compare the types of gears and their advantages. Did you ever take a clock apart to
Drive Essentials. robot. -Andy Baker
 Drive Essentials The best drive train is more important than anything else on the robot meets your strategy goals can be built with your resources rarely needs maintenance can be fixed within 4 minutes
Drive Essentials The best drive train is more important than anything else on the robot meets your strategy goals can be built with your resources rarely needs maintenance can be fixed within 4 minutes
BASIC BUILDING TIPS. Building Tips TABLE OF CONTENTS. Forward 3 plates, beams, Connectors, 5 Bracing and Interlocking 6
 BASIC BUILDING TIPS last updated: June 25 th, 2015 TABLE OF CONTENTS Forward 3 plates, beams, Connectors, 5 Bracing and Interlocking 6 Basics on Gears 8 Types of gears 8 Gears Spacing 9 Simple Gear Ratio
BASIC BUILDING TIPS last updated: June 25 th, 2015 TABLE OF CONTENTS Forward 3 plates, beams, Connectors, 5 Bracing and Interlocking 6 Basics on Gears 8 Types of gears 8 Gears Spacing 9 Simple Gear Ratio
Torque steer effects resulting from tyre aligning torque Effect of kinematics and elastokinematics
 P refa c e Tyres of suspension and drive 1.1 General characteristics of wheel suspensions 1.2 Independent wheel suspensions- general 1.2.1 Requirements 1.2.2 Double wishbone suspensions 1.2.3 McPherson
P refa c e Tyres of suspension and drive 1.1 General characteristics of wheel suspensions 1.2 Independent wheel suspensions- general 1.2.1 Requirements 1.2.2 Double wishbone suspensions 1.2.3 McPherson
INSTALLATION GUIDE. Kawasaki KLR Manual Revision:
 REKLUSE MOTOR SPORTS The z-start Pro Clutch INSTALLATION GUIDE Kawasaki KLR650 191-640 Manual Revision: 030308 2007 Rekluse Motor Sports Rekluse Motor Sports, Inc. 110 E. 43rd Street Boise, Idaho 83714
REKLUSE MOTOR SPORTS The z-start Pro Clutch INSTALLATION GUIDE Kawasaki KLR650 191-640 Manual Revision: 030308 2007 Rekluse Motor Sports Rekluse Motor Sports, Inc. 110 E. 43rd Street Boise, Idaho 83714
Graphical representation of a gear
 Homework 4 Gears Gears are designed to transmit rotary motion. Often they are arranged in a gear train (meshed together). Gear trains provide a change in speed, torque (turning force) and direction (clockwise
Homework 4 Gears Gears are designed to transmit rotary motion. Often they are arranged in a gear train (meshed together). Gear trains provide a change in speed, torque (turning force) and direction (clockwise
END WHEEL NO- TILL 706NT & 1006NT
 END WHEEL NO- TILL 706NT & 1006NT DRILL MAINTENANCE Proper servicing and adjustment is the key to the long life of any farm implement. With careful and systematic inspection of your grain drill, you can
END WHEEL NO- TILL 706NT & 1006NT DRILL MAINTENANCE Proper servicing and adjustment is the key to the long life of any farm implement. With careful and systematic inspection of your grain drill, you can
Sherco Motorcycle Assembly Instructions
 Sherco Motorcycle Assembly This manual is intended to be used as an assembly guide for the Sherco 1.25 2.9 Trials Motorcycles. The motorcycle shown in the pictures is a new 2002, 2.9, the one that you
Sherco Motorcycle Assembly This manual is intended to be used as an assembly guide for the Sherco 1.25 2.9 Trials Motorcycles. The motorcycle shown in the pictures is a new 2002, 2.9, the one that you
APPENDIX A: Background Information to help you design your car:
 APPENDIX A: Background Information to help you design your car: Solar Cars: A solar car is an automobile that is powered by the sun. Recently, solar power has seen a large interest in the news as a way
APPENDIX A: Background Information to help you design your car: Solar Cars: A solar car is an automobile that is powered by the sun. Recently, solar power has seen a large interest in the news as a way
&
 UNISTEER Performance Products 1968-72 CHEVROLET CHEVELLE POWER RACK AND PINION KIT INSTALLATION INSTRUCTION MANUAL 8010700-01 & 8010700-02 Thank you for purchasing Unisteer Performance Products for your
UNISTEER Performance Products 1968-72 CHEVROLET CHEVELLE POWER RACK AND PINION KIT INSTALLATION INSTRUCTION MANUAL 8010700-01 & 8010700-02 Thank you for purchasing Unisteer Performance Products for your
Automatic Side stand retrieval System
 Automatic Side stand retrieval System 1 Achinta Mandal, 2 Sai Kiran Velgada, 3 Sanjay Kumar Sabat, 4 Kamlesh Kumar, 5 Medimi Dinesh B-Tech Final Year Student Department of Mechanical Engineering, Gandhi
Automatic Side stand retrieval System 1 Achinta Mandal, 2 Sai Kiran Velgada, 3 Sanjay Kumar Sabat, 4 Kamlesh Kumar, 5 Medimi Dinesh B-Tech Final Year Student Department of Mechanical Engineering, Gandhi
Linear Shaft Motors in Parallel Applications
 Linear Shaft Motors in Parallel Applications Nippon Pulse s Linear Shaft Motor (LSM) has been successfully used in parallel motor applications. Parallel applications are ones in which there are two or
Linear Shaft Motors in Parallel Applications Nippon Pulse s Linear Shaft Motor (LSM) has been successfully used in parallel motor applications. Parallel applications are ones in which there are two or
IMPORTANT: If you are experiencing slider issues, it may be due to a period of inactivity and an accumulation of debris in the mechanism.
 IMPORTANT: If you are experiencing slider issues, it may be due to a period of inactivity and an accumulation of debris in the mechanism. Corrosion of vehicle components due to over exposure to very corrosive
IMPORTANT: If you are experiencing slider issues, it may be due to a period of inactivity and an accumulation of debris in the mechanism. Corrosion of vehicle components due to over exposure to very corrosive
Installation Manual TWM Performance Short Shifter Cobalt SS/SC, SS/TC, HHR SS, Ion Redline and Saab 9-3
 Page 1 Installation Manual TWM Performance Short Shifter Cobalt SS/SC, SS/TC, HHR SS, Ion Redline and Saab 9-3 Please Note: It is preferable to park on a flat surface, as you will have to engage and disengage
Page 1 Installation Manual TWM Performance Short Shifter Cobalt SS/SC, SS/TC, HHR SS, Ion Redline and Saab 9-3 Please Note: It is preferable to park on a flat surface, as you will have to engage and disengage
Operator s Manual. Single Hand Manual Drive Wheelchair
 Operator s Manual Single Hand Manual Drive Wheelchair Jordan R. Smith Kayla Gosse Leah McElhaney Team #5 Project for Client: Danielle Giroux Client Contact Information: Dave and Suzanne Giroux 53 Charlotte
Operator s Manual Single Hand Manual Drive Wheelchair Jordan R. Smith Kayla Gosse Leah McElhaney Team #5 Project for Client: Danielle Giroux Client Contact Information: Dave and Suzanne Giroux 53 Charlotte
250P Manure Spreader
 0P Manure Spreader Illustrated Parts Breakdown Page - Page Page Page Page Page Page Page Page Page Page Page Page Page Page - Page Page Page 0 Complete Front End PTO/Jack/Hitch Assembly Front Pulley Assembly
0P Manure Spreader Illustrated Parts Breakdown Page - Page Page Page Page Page Page Page Page Page Page Page Page Page Page - Page Page Page 0 Complete Front End PTO/Jack/Hitch Assembly Front Pulley Assembly
Product design: Mechanical systems. Pneumatics. Putting tops on milk bottles. Opening and closing bus doors
 Pneumatics Pneumatic circuits work by means of compressed air. Here are two examples to introduce the components used to make a pneumatic circuit. Putting tops on milk bottles Here the pneumatic circuit
Pneumatics Pneumatic circuits work by means of compressed air. Here are two examples to introduce the components used to make a pneumatic circuit. Putting tops on milk bottles Here the pneumatic circuit
TUFF TORQ TRANSAXLE. Tuff Torq Hydrostatic Transaxle. Transaxle Removal Tuff Torq
 Tuff Torq Hydrostatic Transaxle Internal Service 3. Disconnect the cotter pin and the washer to the brake rod (Figure 63). Internal service information is contained in the Tuff Torq KGIA Transaxle Service
Tuff Torq Hydrostatic Transaxle Internal Service 3. Disconnect the cotter pin and the washer to the brake rod (Figure 63). Internal service information is contained in the Tuff Torq KGIA Transaxle Service
Modern Auto Tech Study Guide Chapter 67 & 69 Pages Suspension & Steering 32 Points. Automotive Service
 Modern Auto Tech Study Guide Chapter 67 & 69 Pages 1280 1346 Suspension & Steering 32 Points Automotive Service 1. The system allows a vehicle s tires & wheels to move up and down as they roll. Steering
Modern Auto Tech Study Guide Chapter 67 & 69 Pages 1280 1346 Suspension & Steering 32 Points Automotive Service 1. The system allows a vehicle s tires & wheels to move up and down as they roll. Steering
mk Roller Conveyors mk Conveyor Technology 240
 mk Roller Conveyors mk Conveyor Technology 240 Contents mk Roller Conveyors RBS-P 2065/2066 242 RBS-P 2255 246 RBT-P 2255 250 RBM-P 2255 254 Rollers 258 Application Examples 260 mk Conveyor Technology
mk Roller Conveyors mk Conveyor Technology 240 Contents mk Roller Conveyors RBS-P 2065/2066 242 RBS-P 2255 246 RBT-P 2255 250 RBM-P 2255 254 Rollers 258 Application Examples 260 mk Conveyor Technology
If the windlass has a diameter of 300mm, calculate the torque produced by the load. (Show all working and units.)
") 8. A winch system used to raise a 5N load is shown. (a) If the windlass has a diameter of mm, calculate the torque produced by the load. (Show all working and units.) T = r = 5 5 = 875Nmm = 8. 75Nm substitution
8. A winch system used to raise a 5N load is shown. (a) If the windlass has a diameter of mm, calculate the torque produced by the load. (Show all working and units.) T = r = 5 5 = 875Nmm = 8. 75Nm substitution
Product design: Mechanical systems
 Changing force and movement Levers Levers can be used to: increase force and decrease speed or distance travelled, as in a crowbar or wheelbarrow; Linkage systems 3-bar linkages are rigid, but by making
Changing force and movement Levers Levers can be used to: increase force and decrease speed or distance travelled, as in a crowbar or wheelbarrow; Linkage systems 3-bar linkages are rigid, but by making
Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur
 Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur Lecture 04 Actuation So, this particular lecture is on actuation.
Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur Lecture 04 Actuation So, this particular lecture is on actuation.
IMPORTANT: If you are experiencing slider issues, it may be due to a period of inactivity and an accumulation of debris in the mechanism.
 IMPORTANT: If you are experiencing slider issues, it may be due to a period of inactivity and an accumulation of debris in the mechanism. Corrosion of vehicle components due to over exposure to very corrosive
IMPORTANT: If you are experiencing slider issues, it may be due to a period of inactivity and an accumulation of debris in the mechanism. Corrosion of vehicle components due to over exposure to very corrosive
MM Rear Coil-Over Kit - Bilstein Shocks (MMCO-3)
") 3430 Sacramento Dr., Unit D San Luis Obispo, CA 93401 Telephone: 805/544-8748 Fax: 805/544-8645 www.maximummotorsports.com MM Rear Coil-Over Kit - Bilstein Shocks (MMCO-3) Read all instructions before
3430 Sacramento Dr., Unit D San Luis Obispo, CA 93401 Telephone: 805/544-8748 Fax: 805/544-8645 www.maximummotorsports.com MM Rear Coil-Over Kit - Bilstein Shocks (MMCO-3) Read all instructions before
INSTALLATION INSTRUCTIONS 64 ½ - 70 SUPERRIDE II INDEPENDENT FRONT SUSPENSION BX-350 FOR COYOTE AND MOD ENGINES
 INSTALLATION INSTRUCTIONS 64 ½ - 70 SUPERRIDE II INDEPENDENT FRONT SUSPENSION BX-350 FOR COYOTE AND MOD ENGINES Please read these instructions completely before starting your installation. Assemble suspension
INSTALLATION INSTRUCTIONS 64 ½ - 70 SUPERRIDE II INDEPENDENT FRONT SUSPENSION BX-350 FOR COYOTE AND MOD ENGINES Please read these instructions completely before starting your installation. Assemble suspension
EagleMotorsports.com Dear Valued Customer,
 Dear Valued Customer, Thank you for choosing the Stallard brand and establishing this partnership. We appreciate the opportunity to assist you and look forward to promoting your future success. The staff
Dear Valued Customer, Thank you for choosing the Stallard brand and establishing this partnership. We appreciate the opportunity to assist you and look forward to promoting your future success. The staff
UNIT-2 ROBOT DRIVE SYSTEMS AND END EFFECTORS
 UNIT-2 ROBOT DRIVE SYSTEMS AND END EFFECTORS CONTENTS 2.1 Pneumatic Drives 2.2 Hydraulic Drives 2.3 Mechanical Drives 2.4 Electrical Drives 2.5 D.C. Servo Motors 2.6 Stepper Motor 2.7 A.C. Servo Motors
UNIT-2 ROBOT DRIVE SYSTEMS AND END EFFECTORS CONTENTS 2.1 Pneumatic Drives 2.2 Hydraulic Drives 2.3 Mechanical Drives 2.4 Electrical Drives 2.5 D.C. Servo Motors 2.6 Stepper Motor 2.7 A.C. Servo Motors
EXTREME R MOTOR OWNER'S MANUAL
 EXTREME R MOTOR OWNER'S MANUAL 2 HP, 3 HP & 5 HP WITH SELF-ENGAGING CHAIN HOIST FOR TECHNICAL SUPPORT PLEASE CALL 1-(855) 594-4969 3137B(0) ECN 1313 BY JM 7/9/15 OPERATOR SERIAL# PRO-FDG MOTOR OPERATORS
EXTREME R MOTOR OWNER'S MANUAL 2 HP, 3 HP & 5 HP WITH SELF-ENGAGING CHAIN HOIST FOR TECHNICAL SUPPORT PLEASE CALL 1-(855) 594-4969 3137B(0) ECN 1313 BY JM 7/9/15 OPERATOR SERIAL# PRO-FDG MOTOR OPERATORS
CHAP: MACHINES Q: 1. Q: 1(Numerical) Answer Total length of crowbar =120 cm Load arm =20 cm Effort arm = =100 cm Q: 2
 Answer Total length of crowbar =120 cm Load arm =20 cm Effort arm = =100 cm Q: 2") CHAP: MACHINES Ex: 3A Q: 1 A machine is a device by which we can either overcome a large resistive force at some point by applying a small force at a convenient point and in a desired direction or by which
CHAP: MACHINES Ex: 3A Q: 1 A machine is a device by which we can either overcome a large resistive force at some point by applying a small force at a convenient point and in a desired direction or by which
SUPERQUEST FALL 2015: OREGON VEX IDEA FACTORY. Mid Willamette Education Consortium
 SUPERQUEST FALL 2015: OREGON VEX IDEA FACTORY Mid Willamette Education Consortium Oregon VEX League Sponsors Mid-Willamette Education Consortium West High Map B105 B128 VEX Robotics A116 B107 Entrance
SUPERQUEST FALL 2015: OREGON VEX IDEA FACTORY Mid Willamette Education Consortium Oregon VEX League Sponsors Mid-Willamette Education Consortium West High Map B105 B128 VEX Robotics A116 B107 Entrance