SUPERQUEST FALL 2015: OREGON VEX IDEA FACTORY. Mid Willamette Education Consortium
|
|
|
- Josephine Fox
- 5 years ago
- Views:
Transcription
1 SUPERQUEST FALL 2015: OREGON VEX IDEA FACTORY Mid Willamette Education Consortium
2 Oregon VEX League Sponsors Mid-Willamette Education Consortium

3 West High Map B105 B128 VEX Robotics A116 B107 Entrance Commons Lunch/ 3D Printing
4 Approximate Schedule Computer Lab 9:30 Welcome VEX Program Overview 10:00 Best Practices Drive Trains Shooters Gathering Students will be available to help your teams get going throughout the event. 11:00 Referee Training Videos 12:00 Lunch 1:00 Best Practices Programming your robot: Autonomous, Driver Control, Competition Template 2:00 Open Lab, Skills Challenges, Scrimmage Matches if robots are available. 2:00 Practice Matches/Skills Challenge/Technical Inspections 4:30 Lab Closes


5 9:30 Welcome Introductions Name, School, Experience VEX Nothing But Net
6 Overview: VEX Qualifying Tournaments Stand-Alone Qualifying Tournaments of teams Most cost $25/team, hosts set the fees Teams are encouraged to compete in two to four Qualifying Tournaments. Register at Teams that win Qualifying Tournaments advance to the State Championship. Excellence Award Winner All teams on the Winning Alliance Design Award Winner (If 25+ teams in the Qualifying tournament) Teams that participate in at least two Qualifying Tournaments also qualify for the State Championship. Wait List
7 Overview: VEX Schedule for Oregon 12/5/2015 West Salem HS: 32 Teams 12/12/2015 Lost River HS (Merrill, OR) 12/19/2015 Toledo HS (Toledo, OR) 28 Teams 1/16/2016 Willamette HS (Eugene, OR) 32 Teams 1/29/2016 West Salem HS Friday Night: 24 Teams 1/30/2016 West Salem HS Saturday: 32 Teams 2/6/2016 Dallas HS: 32 Teams 2/13/2016 Redmond HS 2/27 2/28/2016 State Championship: Sandy HS: 60 Teams 4/20-4/123/2016 VEX World Championship Louisville, KY 450 High School Teams, 150 Middle School Teams.
8 Qualifying Event Schedule / Info. Typically 5 Randomly Selected Qualifying matches Teams are ranked by their performance Win/Loss Record Strength of Schedule (Sum of scores of losing alliances for your matches) Alliances are selected (The number of alliances may vary depending on the number of teams participating) Start at the top seeded team Alliances of 2-3 teams are selected and they stay together throughout the elimination rounds. First alliance to win two matches advances, losing alliance is eliminated. Awards Ceremony
9 Oregon State Championship Planning for up to 60 VEX Teams Saturday / Sunday event. Typically 9 qualifying rounds After Qualifying Rounds Platinum Division The top 8 Alliances are Selected and Compete in the Platinum Division. The Winning Alliance teams are the State Champions Gold Division The remaining teams have the opportunity to compete in the Gold Division. The Winning Alliance teams are the Gold Division Champions.
10 Overview: Advancement to Worlds Oregon has Four High School Slots The three teams on the Platinum Division Winning Alliance The Excellence Award Winner If a team double qualifies, then the slot is giving to the next robot: Highest Programming Skills Score over the course of the year Highest Robot Skills Score over the course of the year Back and forth between Programming and Robot Skills to fill in the positions Oregon has one Middle School Only Slot Excellence Award Winner
11 Judged Awards Given at Events Judges Team that deserves special recognition for efforts leading up to, and during, the event Sportsmanship Team that is extremely courteous and most enthusiastic throughout the event Design (Engineering Notebook Required) Team with a professional design approach (i.e. Engineering Notebooks!) Excellence (Engineering Notebook Required) Overall top honor in the VEX Robotics Competition based on Rank after Qualifying Rounds Rank in Programming Skills Rank in Robot Skills Awards where they were considered as finalists
12 Overview: Changes Safety glasses need to be worn in the pits and at the field at tournaments. Referee Training Safety Video State Championship a Saturday/Sunday event At West Salem Events teams will turn in their engineering notebooks when checking in at the events.
13 Drive Trains simplerobotics.org Referee Training Video: Before the Match Drive Train Samples Show robots from Teams Simple Robotics Comparison
 Pros- simple to build very flexible Not easy to push from side if traditional wheels are used Cons more difficult to control than other options the non driven wheels take weight off of the drive")
14 Skid Turn: Two Wheel Drive 2 wheel drive - This type of drive has only two wheels driven each wheel, driven by at least one motor A K A 2 wheel tank.(... ) Pros- simple to build very flexible Not easy to push from side if traditional wheels are used Cons more difficult to control than other options the non driven wheels take weight off of the drive wheels - limited power in the drivetrain Summary: Good for starters


15 Skid Turn: 4-6 Wheel Drive Pros : Relatively Simple: Common at Competitions relatively simple to build can utilize multiple motors used by many strong teams Not easy to push from side if traditional wheels are used Cons: if gears are used the distance between drive shafts are determined by the gears used multiple motors draw more current and use up motor ports on controller Can be more difficult to repair and more components to fail all the drive wheels need to be close to the same size or they will fight with one another Summary: Strong, relatively simple

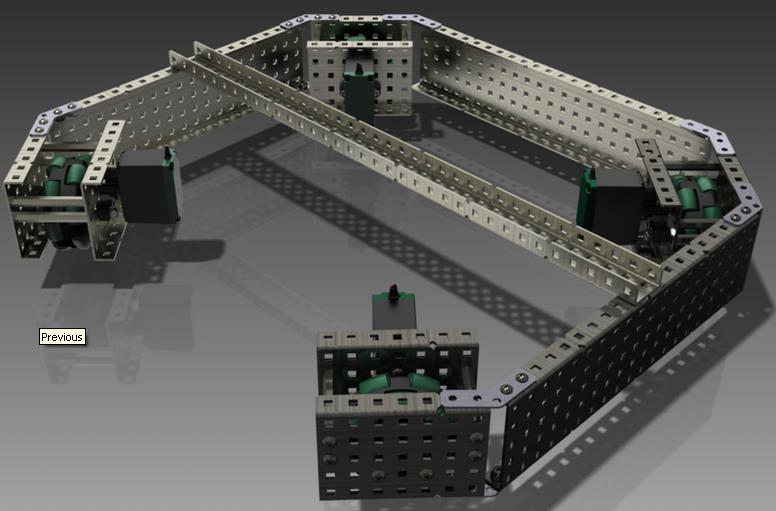
16 Example: Four Omni Wheels

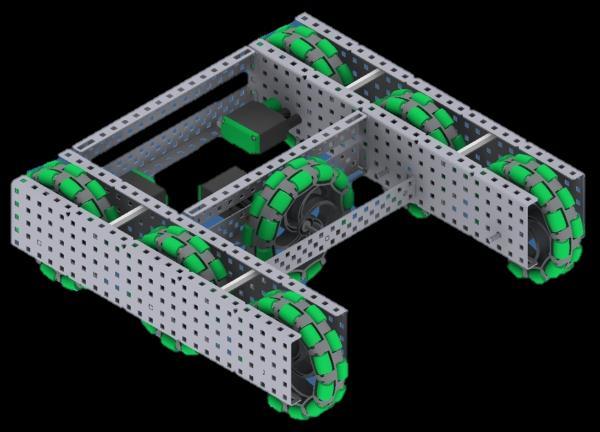
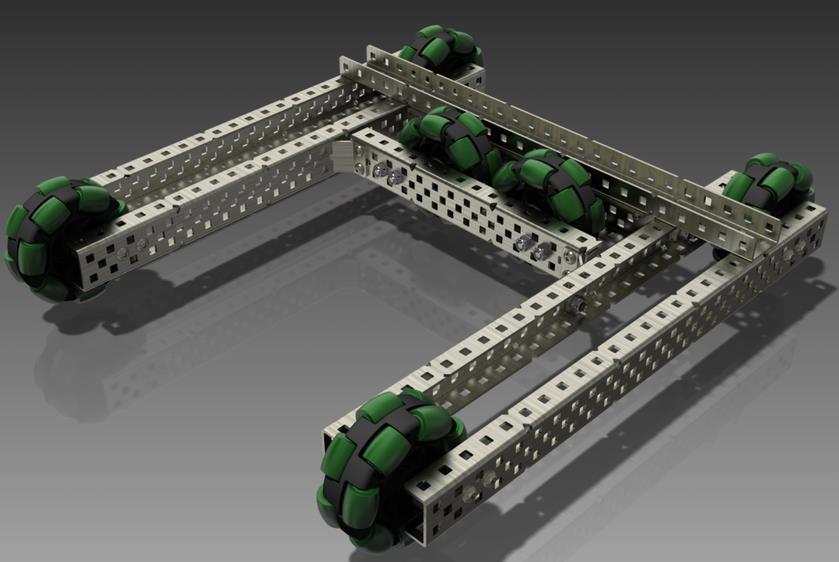
17 Omnis Outside, Traction Middle

18 Another Omni Outside Traction Middle
19 Close up

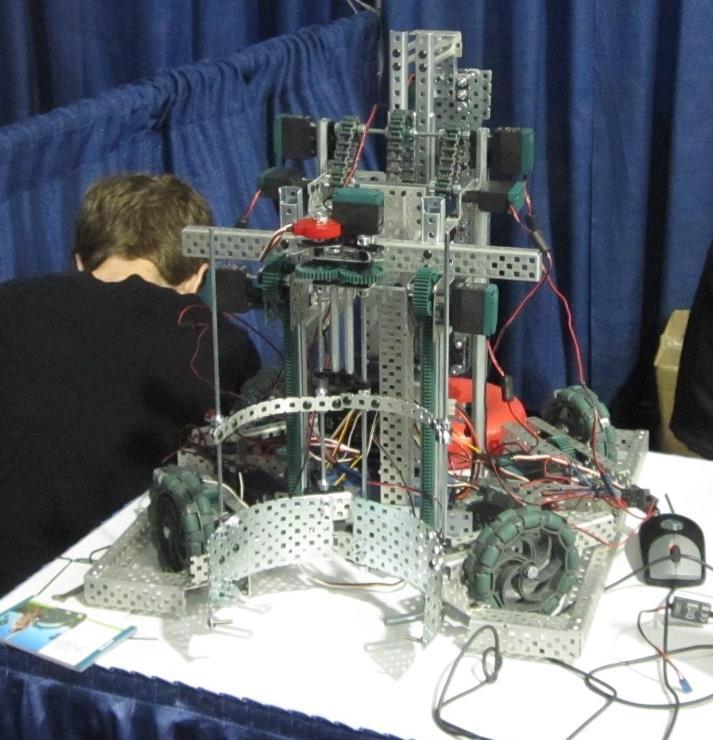
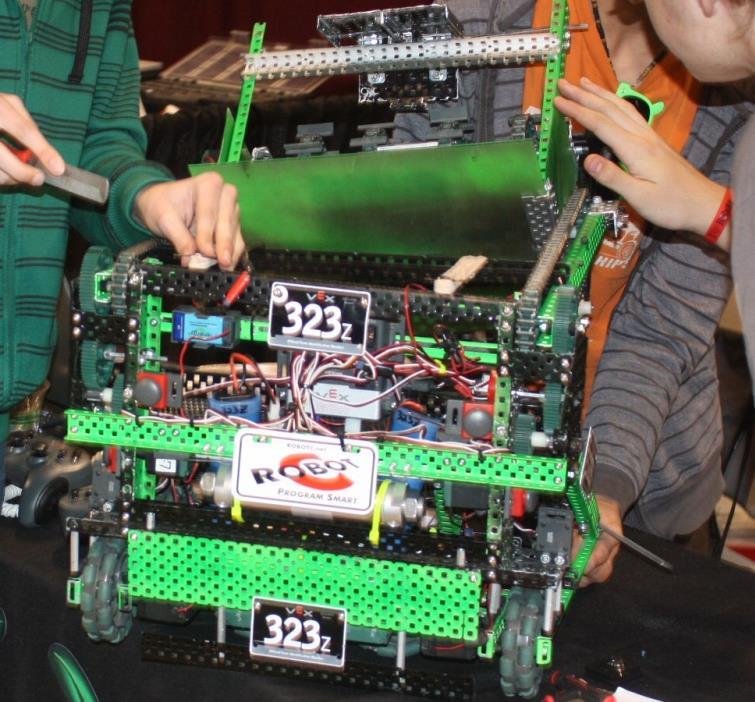
20 Six Omni Wheels, Back Four Powered

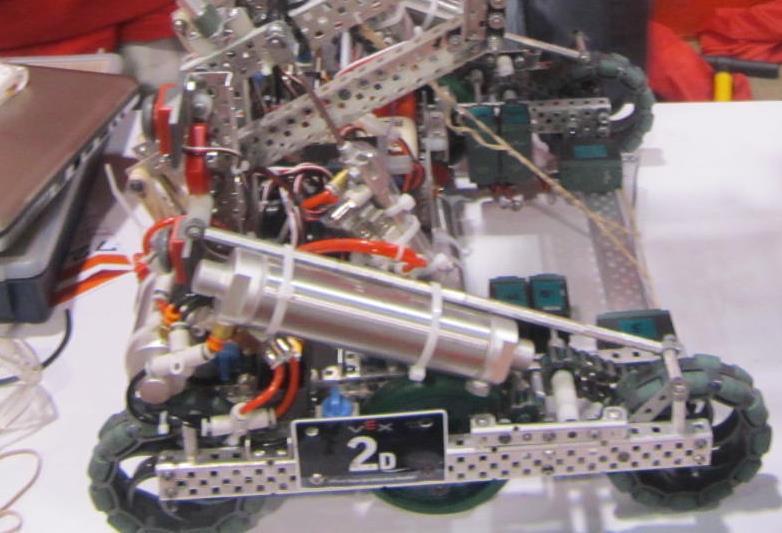
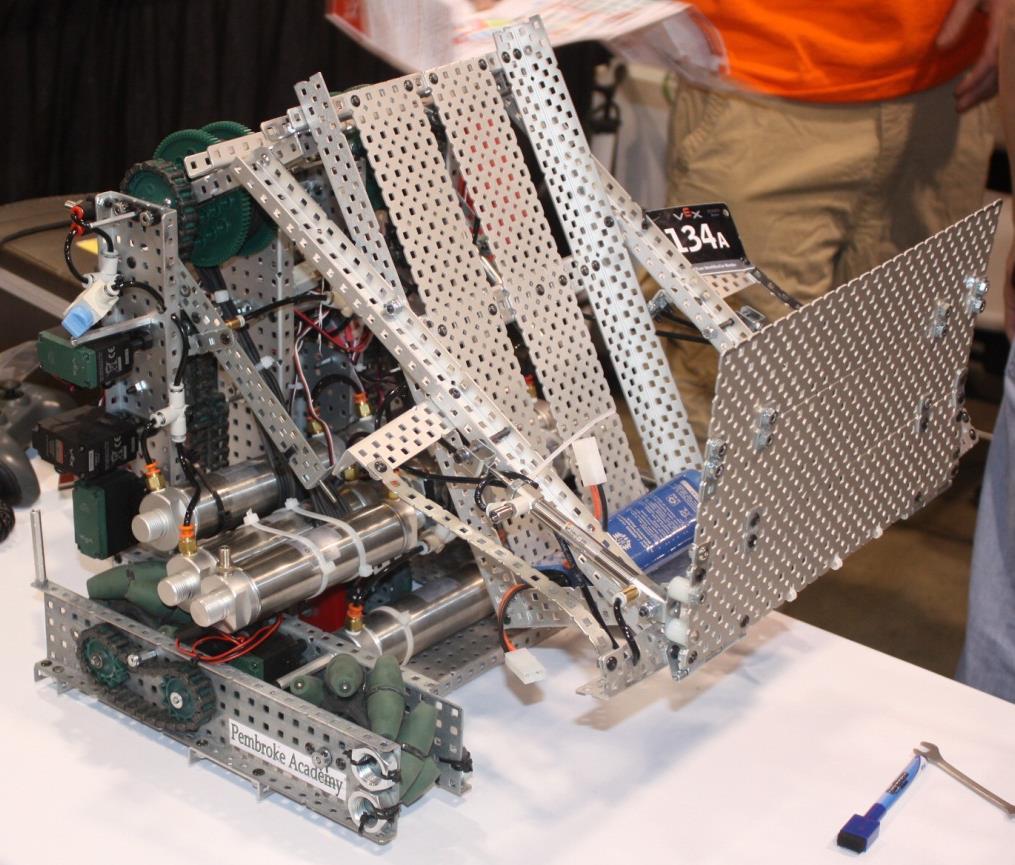
21 Track System Pros pivot point is at the center of the drive system can use only 2 drive motors or multiple motors extra traction treads are available ( P/N: ) able to climb over field obstacles Cons Slick: the standard track lacks traction on some surfaces Slow: the distance traveled per rotation is limited by the size of the drive sprocket ( note some teams have used the larger high strength chain sprockets, P/N: as drive sprockets to over come this limitation.) Summary: Looks cool and can climb, but vulnereable

22 Sack Attack Track Bot

23 Nerf Tank Gun
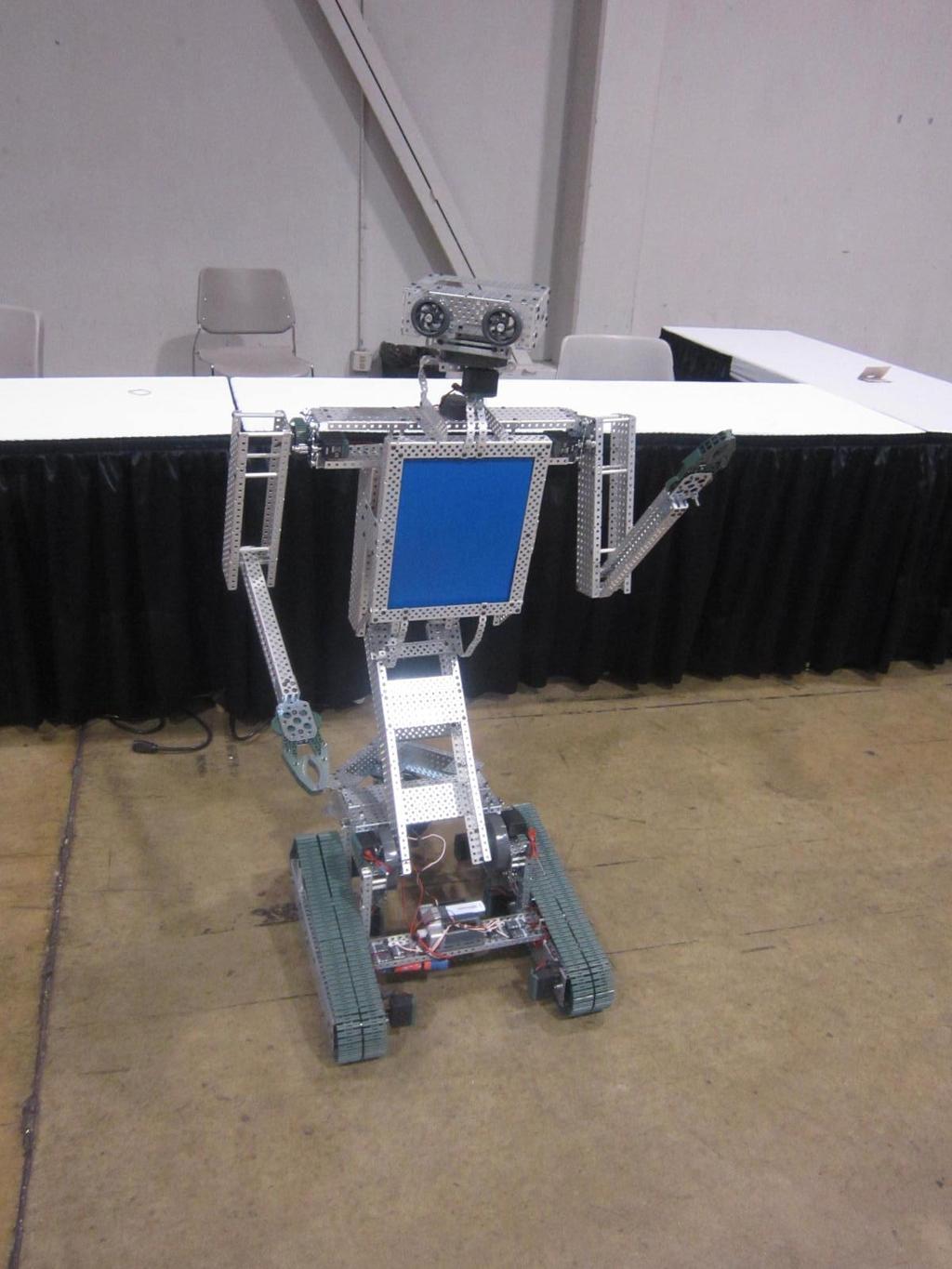
24 Mascot

25 Holonomic: Robots that can go sideways


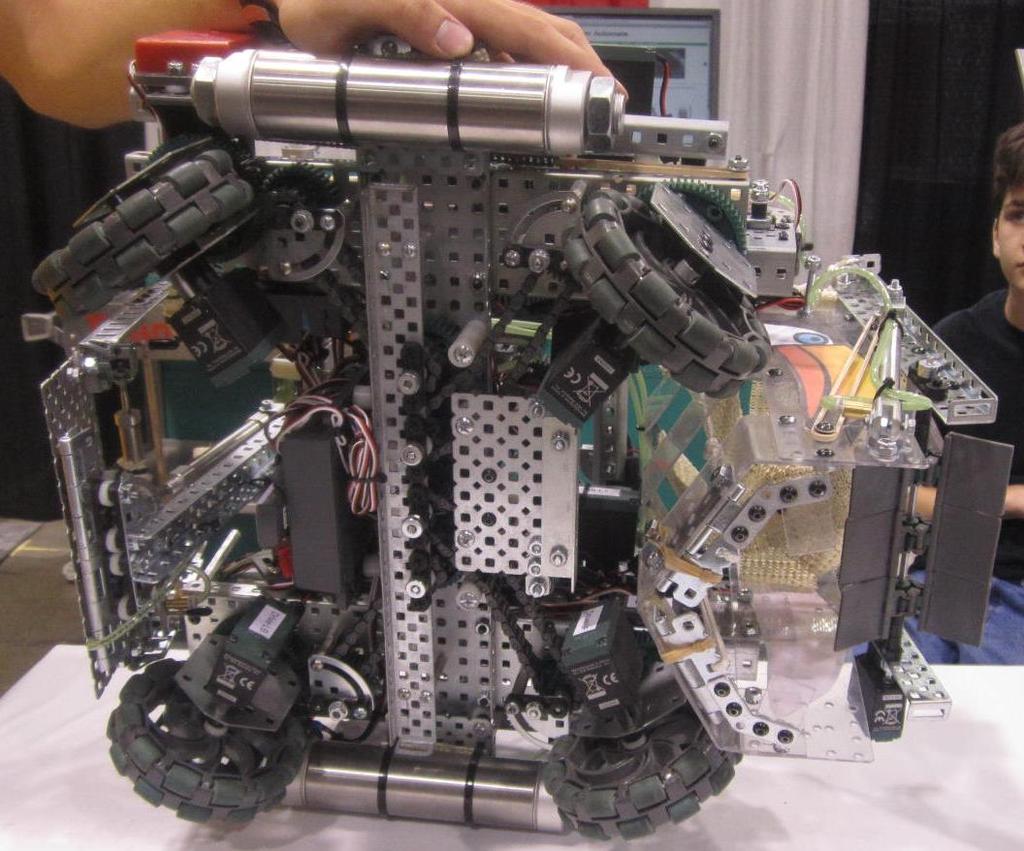
26 Pros can move in 2 different planes (front to back and sided to side), plus pivot very hard to trap in a corner very effective for lining up with game pieces Cons requires a motor for each drive wheel need driver training multiple motors draw more current and use up motor ports on controller does not climb field obstacles well Mecanum
27 Mecanum

28 Mecanum

29 Mecanums in back, Omni in Front
30 X-Drive

31 X-Drive
32 X-Drive

33 H-Drive
34 H - Drive
35 H - Drive


36 Swerve Wheels Pros agile! can climb field obstacles Cons: requires a motor for each wheel and motors to activate the swerve action complex most designs have a higher center of gravity Summary: Very agile, very complex and requires extra parts. Make sure to give yourself time and resources if you are to implement this option.
37 Swervebot
38 Tips for Drive Systems Always support drive shafts on two points (gears, sprockets, track drive sprockets, wheels). Always use Delrin bearings flats ( P/N : ) when placing a drive shaft through a metal structure. Always have a shaft collar ( P/N: ) orientated so as to hold the drive shaft into the motor. Check that no gears, sprockets, drive chains, or wheels are rubbing against a surface that will cause additional friction to drive system. This can be tested by spinning the drive system without the motor attached.
39 More Tips It is a good practice to test the motors before attaching them to the drive system. Try to orientate motor screws for easy access because they have a tendency to loosen up after use. Use the high strength stainless steel (6-32) motor screws they are less likely to strip. When using 6 or 8 wheel drive systems it is advantageous to have the center wheels lower or a slightly larger size than the end wheels
40 More Drive Train Tips Large wheels are faster (all else equal) and provide less torque Smaller wheels accelerate quicker but have a slower top speed. Smaller wheels can be placed closer to the corners With skid turn designs, short-wide designs are easier to turn than long-narrow
41 Sample Shooters.


42 Two-Wheel Shooter

43 One- Wheeled Shooter

44 One-Wheeled Shooter


45 Catapult Shooter

46 Pin Ball Shooter
47 Some Gathering Options



48 Hands:
49 Claws/Hands Pros and Cons Advantages Relatively simple to build Requires a low to medium torque application. Disadvantages- Usually can only hold one item at a time Summary: Great start and good for manipulating one item at a time.


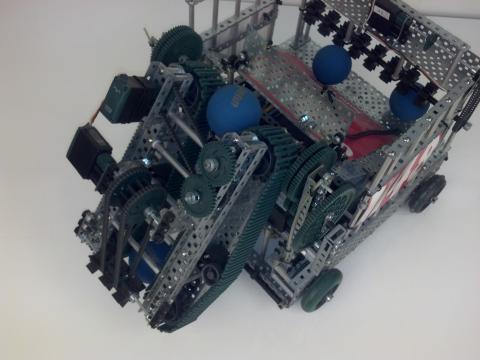
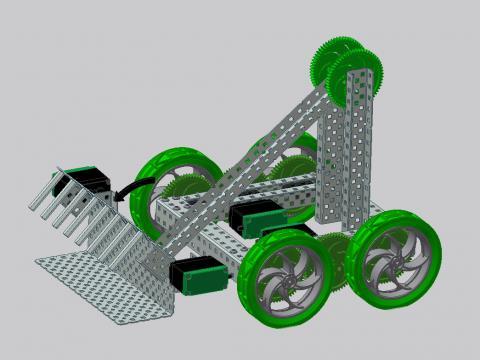
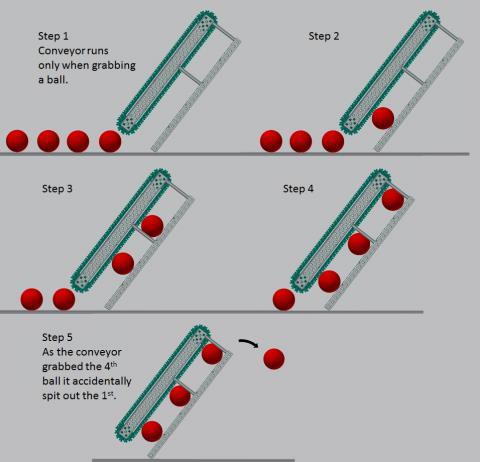
50 Conveyor Belts Conveyer belts- These manipulators can be used to lift objects or move them horizontally. They consist of the tank tread kit or chain from the high strength or regular sprocket sets. Can combine with Tank Tread Upgrade kit for flaps. Many times the conveyer belt is integrated into a roller claw. All conveyer belts require at least one motor to activate

51 Conveyor Belts Pros and Cons Advantages Can move objects horizontally or lift them vertically. Requires a low to medium torque application. Disadvantages- Takes up a large volume on the robot, can raise the center of gravity of the robot Summary: More complex than a claw, but lets you control more than one scoring element at a time.
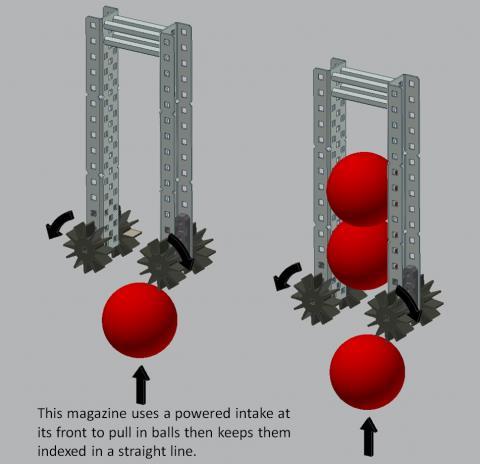

52 Accumulators

53 Side Gatherer

54 Referee Training Videos

55 Pushing, Pinning and Trapping Robust drivetrains are important. Referee Training Pinning and Trapping More drivetrain samples.

56 Referee Training: Human Interaction Link to Human Interaction Video

57 Referee Training: Tipping, Entanglement & Damage Link to Video

58 Referee Training: Disqualification and Disablements Link to Video

59 Referee Training: Possession Link to Video

60 Referee Training: Specialized Field Zones and Associated Rules Link to Video


61 Referee Video: Causing Opponents to Violate a Rule Link to Video
62 Referee Training: Scoring Rules Link to Video
63 Referee Video: Scoring a Match Link to Video


64 12:00 Lunch Thank you Oregon Computer Science Teachers Association!!

65 Programming: Autonomous Programming Autonomous Discussion Setting up and naming the Motors Look at two commands that will be enough to get your robot up and moving. Open up RobotC

66 Programming: Make sure RobotC is ready for Cortex Go to Robot -> Platform Type -> VEX 2.0 Cortex

67 Make Sure it is in the Real-World Robot -> Compiler Target -> Physical Robot
 Naming Convention Rules")

68 Configuring the Robot: Focus on Motors Robot -> Motors and Sensors Setup Select the motor Currently can only purchase 393 Motors, also modify for internal gearing (high speed, turbo speed) Naming Convention Rules Style Start with a letter No spaces, punctuation or reserved words (blue) Describes what it represents First letter is lowercase otherwordsstartwithuppercaseletters For these motors leftmotor clawmotor armmotor rightmotor
 One drivetrain motor will probably need to be reversed so the robot does not go in circles. 5) Select the side for drive motors. 6) Complete the setup for the remaining motors.")
69 1) Select the Motors tab. 2) Name the motor in the desired port. Motors and Sensors Setup Page 3) Use the pull down menus to select the motor. 4) One drivetrain motor will probably need to be reversed so the robot does not go in circles. 5) Select the side for drive motors. 6) Complete the setup for the remaining motors. 7) Click on Apply to remember the changes.

70 Code the setup creates pre-processor directives
71 Now we can start looking at RobotC motor[motorname] = motorpower; wait1msec(milliseconds);
![Vocabulary // Comment task main() motor[] motorb.](/docs-images/90/102874255/images/72-0.jpg "motorc {} wait10msec() ; = Header Code Compile Download Run {} Marks the begin and end of a block of code wait1msec(2000); The robot continues what it was doing for (2000) milliseconds.")
72 Vocabulary // Comment task main() motor[] motorb. motorc {} wait10msec() ; = Header Code Compile Download Run {} Marks the begin and end of a block of code wait1msec(2000); The robot continues what it was doing for (2000) milliseconds. Two seconds in this case. What do you think this code will do? Code Break. Create an autonomous that has your robot move! The Header // In front of the line makes this line a comment /* */ for multiple line comments. task main() Marks the beginning of the instructions for the Robot. RobotC Is CaSe SeNsItIvE! ; is used to mark the end of a command. motor[motorb] = 127; motor[] Used to select the motor. rightmotor = This represents the place where the motor is attached. motor[port10] = 127; does the same thing. = 127; 127 = full power -127 = Reverse 0 = stop

73 Adding a Sensor: Configure and Name 1) Robot -> Motors and Sensors Setup 2) Select the VEX Cortex Digital Sensors 1-12 Tab 3) Name the Sensor. (Same rules as for motors.) - Start with a letter - No spaces or punctuation -no reserved words - should describe the sensor 4) Apply / OK
74 Go forward until the touch sensor is touched. #pragma config(sensor, in1, touchsensor, sensortouch) Plug a touch sensor into port 1. task main() { wait1msec(2000); //Robot waits for 2000 milliseconds while(sensorvalue(touchsensor) == 0) // 0 == not touched, 1 == touched } { motor[port2] = 63; //Motor on port2 is run at half (63) power forward motor[port3] = 63; //Motor on port3 is run at half (63) power forward } motor[port2] = 0; motor[port3] = 0;
75 Programming: Remote Control


76 Programming Remote Control Ch4 Right = 127 Middle = 0 Left = -127 Ch3 Up = 127 Middle = 0 Down = -127 Ch2 Up= 127 Middle = 0 Down = -127 Ch1 Right = 127 Middle = 0 Left = -127
77 Example Using the Remote Values to Drive the Motors Physical Robot Virtual World
78 Joystick Mapping: Physical <- Ch4 -> Up - Ch3 - Dn <- Ch1 -> Up - Ch2 - Dn Channel Left/Down Middle Right/Up vexrt[ch1] vexrt[ch2] vexrt[ch3] vexrt[ch4] Joystick Mapping: Virtual //Place before task main() #pragma x 1 y 1 debuggerwindows( joysticksimple ); #include JoystickDriver.c ; Channel Left/Down Middle Right/Up //Place inside the loop prior to joystick. joystick.joy1_x Command joystick.joy1_y getjoysticksettings(joystick); joystick.joy1_y x 2 y 2 Note: If you copypaste these into your progra m, you will need to retype in the. joystick.joy1_x
79 Online Time: Configure the motors and code the following Physical Robot Virtual World Configure the motors tied to ports on the Cortex: leftmotor, port 1 reversed rightmotor, port 10.

80 Robot Creeping? Y1 and Y2 values might not go exactly to 0 when you release the buttons which can cause your robot to creep. Can correct this in the code. Pseudo Code If the joystick reading is close to 0, say +/- 20 Give a 0 power value to the motor Else Give the joystick reading to the motor
 Finds the absolute value of a number float x; x = abs(5-10);")

81 A Little RobotC Math to Help RobotC Function Description Example abs() Finds the absolute value of a number float x; x = abs(5-10); pow() sqrt() Calculates a power float x; x = pow(10,3); //Calculates and returns 10^3 Finds the square root of a number float x; x = sqrt(8);
82 Using a variable to make threshold changes easier Physical: Getting Rid of the Creep Using the abs command to simplify the condition. if (vexrt[ch3] >(-threshold)) && (vexrt[ch3] < (threshold)) Executes Would this give line of the code same when results. the above condition is true. Executes the commands in the else when the above condition is false. Do the same for the rightmotor
83 Virtual Getting Rid of the Creep Add the pragma directive and include file. If you copy and paste from the PowerPoint you will need to retype in the. Add the getjoysticksettings(joystick); command. Replaced vexrt(ch3) with joystick.joy1_y1 Replaced vexrt(ch2) with joystick.joy1_y2
84 More Control Options To fight motors timing out, you can modify the drive code to lower the power sent to the motors. Go half-power Create an equation that maps remote input to output. Had some math wizzes that used a 5 th degree polynomial to provide more control when going slow. Can put together a bunch of stepped if elses to give different power values for different ranges of input values.
85 No Creep, Half Power Half Power
86 No Creep Half Power: Virtual Online Time: Test it on the Utilities -> Huge Table Half Power
87 Buttons Learning Objectives Be able to use the buttons to control motors on your robot. Complete challenges that incorporate buttons.
88 Joystick Buttons: Physical Buttons return a value of 1 when pushed and 0 when not pushed Button Description Example 5U Top button on back left vexrt[btn5u] 5D Bottom button, back left vexrt[btn5d] 6U Top button, back right vexrt[btn6u] 6D Bottom button, back right vexrt[btn6d] 7U Button 7 up vexrt[btn7u] 7D Button 7 down vexrt[btn7d] 7R Button 7 right vexrt[btn7r] 7L Button 7 left vexrt[btn7l] 8U Button 8 up vexrt[btn8u] 8D Button 8 down vexrt[btn8d] 8R Button 8 right vexrt[btn8r] 8L Button 8 left vexrt[btn8l]
 Name and set the claw and arm motors. 2) Reverse the Arm Motor for Virtual Clawbot.")
89 Using the buttons to control the arm motor First we need to go to Motors and Sensors setup to configure the arm and claw motor. Clawbot Arm: Port 7 Claw: Port 6 Robot -> Motors and Sensors setup 1) Name and set the claw and arm motors. 2) Reverse the Arm Motor for Virtual Clawbot. Might need to reverse for physical robot also. 3) Click Apply and OK when finished.
90 Looking at Arm Control using buttons: Pseudo-Code If button 6U is pushed raise the arm (Send a signal of 127) Else if button 6D is pushed Lower the arm (Send a signal of -127) Else Stop the arm (Send a signal of 0)
91 Looking at the Arm: Pseudo-Code to Code If button 6U is pushed raise the arm (Send a signal of 127) Else if button 6D is pushed Lower the arm (Send a signal of -127) Else Stop the arm (Send a signal of 0) Style Note: Indent between the {} to make the code easier to read.
 joy1btn(6 ) joy1btn(8 ) joy1btn(5 )")
 joy1btn(3 ) joy1btn(2 ) joy1_tophat 7")
92 Virtual World Buttons joy1btn(9 ) joy1btn(1 0) joy1btn(1 ) joy1btn(6 ) joy1btn(8 ) joy1btn(5 ) joy1btn(7 ) Mode joy1btn(1 1) joy1btn(1 2) joy1btn(4 ) joy1btn(3 ) joy1btn(2 ) joy1_tophat
93 Joystick Buttons Virtual World Buttons return a value of 1 when pushed and 0 when not pushed, except the TopHat. Button Description Example 1 Left joy1btn(1) 2 Bottom joy1btn(2) 3 Right joy1btn(3) 4 Top joy1btn(4) 5 Back, top left joy1btn(5) 6 Back, top right joy1btn(6) 7 Back, bottom left joy1btn(7) 8 Back, bottom right joy1btn(8) 9 Small button, top left joy1btn(9) 10 Small button, top right joy1btn(10) joy1_toph at Left joystick button joy1btn(11) 12 Right joystick button joy1btn(12) TopHat Returns values -1 (Not pushed) or 0, 1, 7 depending on which part is pushed. joystick.joy1_tophat
94 Back to the Arm Movement Pseudo-Code but for Virtual Remote If button 6 is pushed raise the arm (Send a signal of 127) Else if button 8 is pushed Lower the arm (Send a signal of -127) Else Stop the arm (Send a signal of 0)
95 Arm Pseudo-Code to Code: Virtual World If button 6 is pushed raise the arm (Send a signal of 127) Else if button 8 is pushed Lower the arm (Send a signal of -127) Else Stop the arm (Send a signal of 0)
96 Where does this code go? Since you want the robot to continually check for the buttons being pressed, it needs to go inside the while(true) loop.
97 Online Time: Test Arm Movement Implement the code for the arm movement and test it in the Virtual or Real World. Try to use what you have learned to program the Claw motor as well using the back left buttons. Test your robot on the Huge Table.
98 Any problems? Arm floating down when button not pushed? How can you combat this? Arm didn t move
99 Claw Motor Virtual Pseudo Code If the back, top, left button is pushed Close the claw (127) Else if the back-bottomleft button is pushed Open the claw (-127) Else Leave the claw (0) Physical




100 Online Time Complete and test the drive code with the Anti-Creep code Test to see if the code works in the Utility -> Huge Table In the Virtual Worlds go to the Remote Control Tab Bull in the Ring: Knocking out cans in < 10 sec Minefield Challenge: Clearing the table of bad mines while not disturbing others Robo Slalom I: Driving through a course. A good time to practice refining remote to controller mapping to make driving more accurate Round up: How many laps can you complete in one minute? The code will need to stop you from driving!
101 Simple Sample Joystick task main() { } while (1 == 1) { } //Creates and infinite loop motor[rightmotor] = vexrt(ch2); //The right motor is set to //equal the value transmitted by //Ch2 (y-axis of the right joystick) motor[port3] = vexrt(ch3); //The motor in port3 is set to equal //the value transmitted by Ch3 //(y-axis of the left joystick)
102 Dual Joystick task main() { while (true) { motor[port1] = vexrt(ch2); motor[port2] = vexrt(ch3); motor[port3] = vexrt(ch2xmtr2); //Reading the second remote motor[port4] = vexrt(ch3xmtr2); } }
103 Competition Template Open Competition Template File -> New -> Competition Template Copy Autonomous code into Template Copy Driver Controlled Code into Template Test using Competition Switch
104 2:00 Technical Inspection/ Practice Matches Technical Inspection/ Practice Matches Robot Skills (Official if team is registered) One robot, all elements, one minute Practice 2v2 Matches 2v2, 15 Second Autonomous. 1:45 Driver Controlled Programming Skills (Official if team is registered) One robot, all elements, one minute
105 4:15 Clean up Thanks for coming 4:30 Closing
106 VEX Schedule for Oregon 11/15/2014 VEX Tournament Phoenix, High School 12/6/2014 VEX Tournament at West Salem 12/13/2014 VEX Skills Challenge Event at North Marion 1/10/2015 VEX Tournament at Evergreen Space Museum 1/24/2015 VEX Tournament at West Salem 2/7/2015 VEX Tournament at Dallas High School 2/14/2015 VEX Tournament at Sandy High School 2/21/2015 VEX Tournament at Redmond High School 2/28/2015 VEX Tournament at Dallas HS 3/6-3/7/2015 VEX State Championship: North Marion High Winning Alliance, Excellence and Robot Design Advance to Worlds Middle School Excellence Winner advances to Worlds 4/15-4/18/2015 VEX World Championship Louisville, KY
107 References
SuperQuest Salem Drive Train Best Practices
 SuperQuest Salem Drive Train Best Practices Drive Trains Design Hints Compare different designs Look at examples from Worlds Tips for Drive Systems Always support drive shafts on two points (gears, sprockets,
SuperQuest Salem Drive Train Best Practices Drive Trains Design Hints Compare different designs Look at examples from Worlds Tips for Drive Systems Always support drive shafts on two points (gears, sprockets,
Robot Preparation for the VEX World Championship/ US Open. Lessons learned over the past 6 years by David Kelly 2013 VWC, Teacher of the Year
 Robot Preparation for the VEX World Championship/ US Open Lessons learned over the past 6 years by David Kelly 2013 VWC, Teacher of the Year Re-designing Re-designing your robot to a new concept yields
Robot Preparation for the VEX World Championship/ US Open Lessons learned over the past 6 years by David Kelly 2013 VWC, Teacher of the Year Re-designing Re-designing your robot to a new concept yields
SuperQuest Salem Arms Best Practices
 SuperQuest Salem Arms Best Practices VEX Arm Designs Single 4-Bar 6-Bar 8-Bar Linear Slide Scissor Double Reverse 4-Bar Single Arms Arms These manipulators consist of a pivot point and at least 1 motor.
SuperQuest Salem Arms Best Practices VEX Arm Designs Single 4-Bar 6-Bar 8-Bar Linear Slide Scissor Double Reverse 4-Bar Single Arms Arms These manipulators consist of a pivot point and at least 1 motor.
Unit 1 Introduction to VEX and Robotics
 Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and
Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and
Drive Essentials. robot. -Andy Baker
 Drive Essentials The best drive train is more important than anything else on the robot meets your strategy goals can be built with your resources rarely needs maintenance can be fixed within 4 minutes
Drive Essentials The best drive train is more important than anything else on the robot meets your strategy goals can be built with your resources rarely needs maintenance can be fixed within 4 minutes
How to Build with the Mindstorm Kit
 How to Build with the Mindstorm Kit There are many resources available Constructopedias Example Robots YouTube Etc. The best way to learn, is to do Remember rule #1: don't be afraid to fail New Rule: don't
How to Build with the Mindstorm Kit There are many resources available Constructopedias Example Robots YouTube Etc. The best way to learn, is to do Remember rule #1: don't be afraid to fail New Rule: don't
Amazing127_RobotCDesignDoc
 Amazing127_RobotCDesignDoc Specifications: -Length 6.6 in -Width 9.7 in -Height 6.6 in Pictures of our robot: Left Side Back Side Right Side Front Side Componets: 1 Small Motor 2 Large Motors 1 Touch Sencor
Amazing127_RobotCDesignDoc Specifications: -Length 6.6 in -Width 9.7 in -Height 6.6 in Pictures of our robot: Left Side Back Side Right Side Front Side Componets: 1 Small Motor 2 Large Motors 1 Touch Sencor
Deriving Consistency from LEGOs
 Deriving Consistency from LEGOs What we have learned in 6 years of FLL by Austin and Travis Schuh Objectives Basic Building Techniques How to Build Arms and Drive Trains Using Sensors How to Choose a Programming
Deriving Consistency from LEGOs What we have learned in 6 years of FLL by Austin and Travis Schuh Objectives Basic Building Techniques How to Build Arms and Drive Trains Using Sensors How to Choose a Programming
Autodesk's VEX Robotics Curriculum. Unit 14: Accumulator Design
 Autodesk's VEX Robotics Curriculum Unit 14: Accumulator Design 1 Overview In Unit 14: Accumulator Design, you learn about the use and design of accumulators. You design your own accumulator, report on
Autodesk's VEX Robotics Curriculum Unit 14: Accumulator Design 1 Overview In Unit 14: Accumulator Design, you learn about the use and design of accumulators. You design your own accumulator, report on
VEX ELECTROMAGNET. Make It Real CAD Engineering Challenge
 VEX ELECTROMAGNET Make It Real CAD Engineering Challenge CONTENT Introduction... 2 Description... 2 Components Description... 3 Technical Specifications... 4 Force exerted by magnetic field... 5 how the
VEX ELECTROMAGNET Make It Real CAD Engineering Challenge CONTENT Introduction... 2 Description... 2 Components Description... 3 Technical Specifications... 4 Force exerted by magnetic field... 5 how the
ROBOT C CHALLENGE DESIGN DOCUMENT TEAM NAME. Sample Design Document. Bolt EVA. Lightning. RoboGirls. Cloud9. Femmebots
 ROBOT C CHALLENGE DESIGN DOCUMENT TEAM NAME (SELECT TEAM NAME TO NAVIGATE TO THE TEAM S DESIGN DOCUMENT) Sample Design Document Bolt EVA Lightning RoboGirls Cloud9 Femmebots SAMPLE ROBOT C DESIGN DOCUMENT
ROBOT C CHALLENGE DESIGN DOCUMENT TEAM NAME (SELECT TEAM NAME TO NAVIGATE TO THE TEAM S DESIGN DOCUMENT) Sample Design Document Bolt EVA Lightning RoboGirls Cloud9 Femmebots SAMPLE ROBOT C DESIGN DOCUMENT
Drive Systems. Steve Shade October 26, 2013
 Steve Shade October 26, 2013 Introduction Steve Shade 15 year veteran Chesapeake Team Development Lead Chesapeake Head Referee Senior Controls and Simulation Engineer for Rolls-Royce Marine North America
Steve Shade October 26, 2013 Introduction Steve Shade 15 year veteran Chesapeake Team Development Lead Chesapeake Head Referee Senior Controls and Simulation Engineer for Rolls-Royce Marine North America
Manipulators. Basic/Background Info Types of Manipulators General Manipulator design tips
 FTC Manipulators By: Zach Zakfeld (Enigma Robotics) Teams: FTC 5391, FTC 5385 and FRC 2075 *Some images in this presentation are of FRC robots so exact designs may not be applicable, however all of the
FTC Manipulators By: Zach Zakfeld (Enigma Robotics) Teams: FTC 5391, FTC 5385 and FRC 2075 *Some images in this presentation are of FRC robots so exact designs may not be applicable, however all of the
2018 KANSAS BEST BREAKOUT SESSIONS
 2018 KANSAS BEST BREAKOUT SESSIONS Tips for Building a Robot Bryan Jaax September 8, 2018 1 ST STEP: READ the RULES and Technical Data Package 2 FOLLOW AN ENGINEERING PROCESS Define the Problem Brainstorm:
2018 KANSAS BEST BREAKOUT SESSIONS Tips for Building a Robot Bryan Jaax September 8, 2018 1 ST STEP: READ the RULES and Technical Data Package 2 FOLLOW AN ENGINEERING PROCESS Define the Problem Brainstorm:
Smart Spinner. Age 7+ Teacher s Notes. In collaboration with NASA
 Smart Spinner Age 7+ Teacher s Notes In collaboration with NASA LEGO and the LEGO logo are trademarks of the/sont des marques de commerce de/son marcas registradas de LEGO Group. 2012 The LEGO Group. 190912
Smart Spinner Age 7+ Teacher s Notes In collaboration with NASA LEGO and the LEGO logo are trademarks of the/sont des marques de commerce de/son marcas registradas de LEGO Group. 2012 The LEGO Group. 190912
Curriculum Guide Course: Robotic Systems A Course Number: 1770
 PEQUEA VALLEY SCHOOL DISTRICT Curriculum Guide Course: Robotic Systems A Course Number: 1770 Grade Level: 9-12 Course Length (Days): 60 Number Minutes per Day: 60 Clock Hours per Year: 60 Number Credits:
PEQUEA VALLEY SCHOOL DISTRICT Curriculum Guide Course: Robotic Systems A Course Number: 1770 Grade Level: 9-12 Course Length (Days): 60 Number Minutes per Day: 60 Clock Hours per Year: 60 Number Credits:
Reliable Reach. Robotics Unit Lesson 4. Overview
 Robotics Unit Lesson 4 Reliable Reach Overview Robots are used not only to transport things across the ground, but also as automatic lifting devices. In the mountain rescue scenario, the mountaineers are
Robotics Unit Lesson 4 Reliable Reach Overview Robots are used not only to transport things across the ground, but also as automatic lifting devices. In the mountain rescue scenario, the mountaineers are
Swerve Drive Selection Process. Cyber Blue 234 OCTOBER 2010 / Indiana Forums
 Swerve Drive Selection Process Cyber Blue 234 OCTOBER 2010 / Indiana Forums Background Cyber Blue had discussed wanting to try an omni-directional drive system for many years Recognized need for a lot
Swerve Drive Selection Process Cyber Blue 234 OCTOBER 2010 / Indiana Forums Background Cyber Blue had discussed wanting to try an omni-directional drive system for many years Recognized need for a lot
Engineering Design Process for BEST Robotics JANNE ACKERMAN COLLIN COUNTY (COCO) BEST & BEST OF TEXAS ROBOTICS
 BEST & BEST OF TEXAS ROBOTICS") Engineering Design Process for BEST Robotics JANNE ACKERMAN COLLIN COUNTY (COCO) BEST & BEST OF TEXAS ROBOTICS Agenda Getting Started Lessons Learned Design Process Engineering Mechanics 2 Save Time Complete
Engineering Design Process for BEST Robotics JANNE ACKERMAN COLLIN COUNTY (COCO) BEST & BEST OF TEXAS ROBOTICS Agenda Getting Started Lessons Learned Design Process Engineering Mechanics 2 Save Time Complete
F.I.R.S.T. Robotic Drive Base
 F.I.R.S.T. Robotic Drive Base Design Team Shane Lentini, Jose Orozco, Henry Sick, Rich Phelan Design Advisor Prof. Sinan Muftu Abstract F.I.R.S.T. is an organization dedicated to inspiring and teaching
F.I.R.S.T. Robotic Drive Base Design Team Shane Lentini, Jose Orozco, Henry Sick, Rich Phelan Design Advisor Prof. Sinan Muftu Abstract F.I.R.S.T. is an organization dedicated to inspiring and teaching
Build Season Overview Nabeel Peshimam October 27 th, 2014
 Build Season Overview Nabeel Peshimam October 27 th, 2014 ! Two Robots?!! Documentation! Subteam Division! Kickoff! Game Analysis! Priority List! Weeks 1-4! Concept Design! Prototyping! Design Freezes!!
Build Season Overview Nabeel Peshimam October 27 th, 2014 ! Two Robots?!! Documentation! Subteam Division! Kickoff! Game Analysis! Priority List! Weeks 1-4! Concept Design! Prototyping! Design Freezes!!
Your web browser (Safari 7) is out of date. For more security, comfort and. the best experience on this site: Update your browser Ignore
 is out of date. For more security, comfort and. the best experience on this site: Update your browser Ignore") Your web browser (Safari 7) is out of date. For more security, comfort and Activitydevelop the best experience on this site: Update your browser Ignore Circuits with Friends What is a circuit, and what
Your web browser (Safari 7) is out of date. For more security, comfort and Activitydevelop the best experience on this site: Update your browser Ignore Circuits with Friends What is a circuit, and what
FIRST Chesapeake District Northern Maryland Event sponsored by Leidos Harford Technical High School March 18-20, 2016
 FIRST Chesapeake District Northern Maryland Event sponsored by Leidos Harford Technical High School March 18-20, 2016 1 District Event Team Overview This document is designed to provide teams with basic
FIRST Chesapeake District Northern Maryland Event sponsored by Leidos Harford Technical High School March 18-20, 2016 1 District Event Team Overview This document is designed to provide teams with basic
2017 FLYSET FTC Workshop. Hosted by
 2017 FLYSET FTC Workshop Hosted by Hardware Topics Session Evan / Abhishek contributed by Austin / Derek Melody / Audrey from FTC team #12810 Agenda Harvester mechanism comparison Shooter mechanism comparison
2017 FLYSET FTC Workshop Hosted by Hardware Topics Session Evan / Abhishek contributed by Austin / Derek Melody / Audrey from FTC team #12810 Agenda Harvester mechanism comparison Shooter mechanism comparison
Baugh Wind Energy Design Competition Saturday, 9 February 2019
 Baugh Wind Energy Design Competition Saturday, 9 February 2019 Oklahoma Christian University is pleased to announce the third annual wind energy design competition for middle school and high school students.
Baugh Wind Energy Design Competition Saturday, 9 February 2019 Oklahoma Christian University is pleased to announce the third annual wind energy design competition for middle school and high school students.
INTRODUCTION CAN YOU PROGRAMME A SIEMENS ROBO BUGGY? Driving wheels. Left motor. Direction. Front bearing. Micro:bit Right motor
 INTRODUCTION Self-driving vehicles driven using code are on the horizon. In the future, cars and vehicles will have more in common with programmable robots and drivers will be more like passengers. Using
INTRODUCTION Self-driving vehicles driven using code are on the horizon. In the future, cars and vehicles will have more in common with programmable robots and drivers will be more like passengers. Using
Safe Braking on the School Bus Advanced BrakingTechniques and Practices. Reference Guide and Test by Video Communications
 Safe Braking on the School Bus Advanced BrakingTechniques and Practices Reference Guide and Test by Video Communications Introduction Brakes are considered one of the most important items for school bus
Safe Braking on the School Bus Advanced BrakingTechniques and Practices Reference Guide and Test by Video Communications Introduction Brakes are considered one of the most important items for school bus
ROBOTICS BUILDING BLOCKS
 ROBOTICS BUILDING BLOCKS 2 CURRICULUM MAP Page Title...Section Estimated Time (minutes) Robotics Building Blocks 0 2 Imaginations Coming Alive 5...Robots - Changing the World 5...Amazing Feat 5...Activity
ROBOTICS BUILDING BLOCKS 2 CURRICULUM MAP Page Title...Section Estimated Time (minutes) Robotics Building Blocks 0 2 Imaginations Coming Alive 5...Robots - Changing the World 5...Amazing Feat 5...Activity
2016 PINEWOOD DERBY CROSSWINDS DISTRICT RULES
 2016 PINEWOOD DERBY CROSSWINDS DISTRICT RULES OFFICIAL CAR RULES: These rules and the equipment used at this event take precedence over any rules or equipment used at previous Pinewood Derbies. The Pit
2016 PINEWOOD DERBY CROSSWINDS DISTRICT RULES OFFICIAL CAR RULES: These rules and the equipment used at this event take precedence over any rules or equipment used at previous Pinewood Derbies. The Pit
Module 3.5 Limited Spaces Lesson Plan
 MONTANA TEEN DRIVER EDUCATION AND TRAINING Module 3.5 Limited Spaces Lesson Plan Traffic Education Curriculum Benchmarks Performing Turnabouts The student is expected to describe and demonstrate good habits
MONTANA TEEN DRIVER EDUCATION AND TRAINING Module 3.5 Limited Spaces Lesson Plan Traffic Education Curriculum Benchmarks Performing Turnabouts The student is expected to describe and demonstrate good habits
Newton Scooters TEACHER NOTES. Forces Chapter Project. Materials and Preparation. Chapter Project Overview. Keep Students on Track Section 2
 TEACHER NOTES Lab zonetm Newton Scooters The following steps will walk you through the. Use the hints as you guide your students through planning, construction, testing, improvements, and presentations.
TEACHER NOTES Lab zonetm Newton Scooters The following steps will walk you through the. Use the hints as you guide your students through planning, construction, testing, improvements, and presentations.
CROSSWINDS DISTRICT 2011 PINEWOOD DERBY
 CROSSWINDS DISTRICT When: Saturday, March 12, 2011 Where: Cary Towne Center Mall 2011 PINEWOOD DERBY The Event: Tigers, Wolves, Bears, and Webelos scouts who won First Place in their pack events are invited
CROSSWINDS DISTRICT When: Saturday, March 12, 2011 Where: Cary Towne Center Mall 2011 PINEWOOD DERBY The Event: Tigers, Wolves, Bears, and Webelos scouts who won First Place in their pack events are invited
WELCOME TO THE FTC SEASON KICK-OFF
 10:00am Workshops Auditorium: Mechanical Design by Bob Howard Cafeteria: FTC Awards and How to Win Them by John Coffeen 10:40am Workshops Auditorium: The Hitchhiker s Guide to FTC Fundraising: Don t Panic!
10:00am Workshops Auditorium: Mechanical Design by Bob Howard Cafeteria: FTC Awards and How to Win Them by John Coffeen 10:40am Workshops Auditorium: The Hitchhiker s Guide to FTC Fundraising: Don t Panic!
AMERICAN CORNHOLE ORGANIZATION PLAYERS GUIDE SEASON XI OFFICIAL GUIDE. AmericanCornhole.com American Cornhole, LLC
 AMERICAN CORNHOLE ORGANIZATION PLAYERS GUIDE SEASON XI OFFICIAL GUIDE AmericanCornhole.com TABLE OF CONTENTS Chapter 1 ACO Membership 1.1 ACO Membership and where to purchase 1.2 Benefits of becoming a
AMERICAN CORNHOLE ORGANIZATION PLAYERS GUIDE SEASON XI OFFICIAL GUIDE AmericanCornhole.com TABLE OF CONTENTS Chapter 1 ACO Membership 1.1 ACO Membership and where to purchase 1.2 Benefits of becoming a
 info@vewsa.org.au www.vewsa.org.au Want to be part of the inaugural season of Victorian Powerchair Sports League? Who is VEWSA? Victorian Electric Wheelchair Sports Association (VEWSA) is a community based,
info@vewsa.org.au www.vewsa.org.au Want to be part of the inaugural season of Victorian Powerchair Sports League? Who is VEWSA? Victorian Electric Wheelchair Sports Association (VEWSA) is a community based,
Issaquah Robotics Society 1318 Issaquah High School - Washington. Engineering Notebook 2018 Season
 Issaquah Robotics Society 1318 Issaquah High School - Washington Engineering Notebook 2018 Season Table of Contents 1. Engineering Story 2. Our Product Cycle 3. The Game Summary Tasks & Points 4. Strategy
Issaquah Robotics Society 1318 Issaquah High School - Washington Engineering Notebook 2018 Season Table of Contents 1. Engineering Story 2. Our Product Cycle 3. The Game Summary Tasks & Points 4. Strategy
Electric Racing for Students
 High School Collegiate Autonomous Electric Racing for Students Program Overview Created and hosted by: 2018 evgrand Prix www.evgrandprix.org 1 / 5 Origins evgrand Prix began in 2009 with a professor at
High School Collegiate Autonomous Electric Racing for Students Program Overview Created and hosted by: 2018 evgrand Prix www.evgrandprix.org 1 / 5 Origins evgrand Prix began in 2009 with a professor at
2016 MA Truck Driving Championship NETTTS 1600 Osgood Street N. Andover, MA Sunday, June 5, 2016
 Massachusetts Truck Driving Championship Information & Entry Form Date: March 2016 To: Managers / Safety Supervisors / Drivers From: Fred Schenk, Chair, 2016 TDC Committee Re: 2016 Massachusetts Professional
Massachusetts Truck Driving Championship Information & Entry Form Date: March 2016 To: Managers / Safety Supervisors / Drivers From: Fred Schenk, Chair, 2016 TDC Committee Re: 2016 Massachusetts Professional
Pre Built Competition Description, Rules 2.0 and Guidelines. Competition Date: December 2, 2017 Coordinator: Austin Cwiklik
 Pre Built Competition Description, Rules 2.0 and Guidelines Competition Date: December 2, 2017 Coordinator: Austin Cwiklik Introduction General Competition Overview Procedures Detailed Competition Overview
Pre Built Competition Description, Rules 2.0 and Guidelines Competition Date: December 2, 2017 Coordinator: Austin Cwiklik Introduction General Competition Overview Procedures Detailed Competition Overview
PRESEASON CHASSIS SETUP TIPS
 PRESEASON CHASSIS SETUP TIPS A Setup To-Do List to Get You Started By Bob Bolles, Circle Track Magazine When we recently set up our Project Modified for our first race, we followed a simple list of to-do
PRESEASON CHASSIS SETUP TIPS A Setup To-Do List to Get You Started By Bob Bolles, Circle Track Magazine When we recently set up our Project Modified for our first race, we followed a simple list of to-do
8th Annual Spring Classic
 8th Annual Spring Classic Police Motorcycle Training and Skills Competition April 18 th -21st, 2018 Trader s Village 2602 Mayfield Rd Grand Prairie, Texas First A Little Background: In 2011 the Grand Prairie
8th Annual Spring Classic Police Motorcycle Training and Skills Competition April 18 th -21st, 2018 Trader s Village 2602 Mayfield Rd Grand Prairie, Texas First A Little Background: In 2011 the Grand Prairie
Wheeled Mobile Robots
 Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Team Update 01. The Field Drawings FIRST POWER UP specific drawing package has been updated with the following changes:
 Team Update 01 General Drawing Packages The Field Drawings FIRST POWER UP specific drawing package has been updated with the following changes: - GE-18130 has been added - GE-181 and GE18025 have been
Team Update 01 General Drawing Packages The Field Drawings FIRST POWER UP specific drawing package has been updated with the following changes: - GE-18130 has been added - GE-181 and GE18025 have been
Objectives. Materials TI-73 CBL 2
 . Objectives To understand the relationship between dry cell size and voltage Activity 4 Materials TI-73 Unit-to-unit cable Voltage from Dry Cells CBL 2 Voltage sensor New AAA, AA, C, and D dry cells Battery
. Objectives To understand the relationship between dry cell size and voltage Activity 4 Materials TI-73 Unit-to-unit cable Voltage from Dry Cells CBL 2 Voltage sensor New AAA, AA, C, and D dry cells Battery
2018 MA Truck Driving Championship New England Tractor Trailer Training School 1600 Osgood Street * North Andover, MA Sunday, June 3, 2018
 Massachusetts Truck Driving Championship Information & Entry Form Date: March 2018 To: Managers / Safety Supervisors / Drivers From: Fred Schenk, Chair, 2018 TDC Committee Re: 2018 Massachusetts Professional
Massachusetts Truck Driving Championship Information & Entry Form Date: March 2018 To: Managers / Safety Supervisors / Drivers From: Fred Schenk, Chair, 2018 TDC Committee Re: 2018 Massachusetts Professional
MS4SSA Robotics Modules: Mechanisms
 MS4SSA Robotics Modules: Mechanisms Kenechukwu Mbanisi Worcester Polytechnic Institute Mathematics and Science for Sub-Saharan Africa (MS4SSA): A World Bank Initiative to Improve Student Learning in Africa
MS4SSA Robotics Modules: Mechanisms Kenechukwu Mbanisi Worcester Polytechnic Institute Mathematics and Science for Sub-Saharan Africa (MS4SSA): A World Bank Initiative to Improve Student Learning in Africa
GUIDE FOR BUILDING THE PROTOBOT AND TUMBLER
 GUIDE FOR BUILDING THE PROTOBOT AND TUMBLER NOTE: This kit requires other components which are not included in order to build a complete working robot. The primary additional required component is a compatible
GUIDE FOR BUILDING THE PROTOBOT AND TUMBLER NOTE: This kit requires other components which are not included in order to build a complete working robot. The primary additional required component is a compatible
CONTACT >>> Sam Wick (507) organization/diesel. DieselClubUMD/
 organization/diesel. DieselClubUMD/") The R&D Engineering Club is a collective of aspiring students who want to gain hands-on experience, a practical understanding of teamwork, and engine competency. We focus our efforts on competing annually
The R&D Engineering Club is a collective of aspiring students who want to gain hands-on experience, a practical understanding of teamwork, and engine competency. We focus our efforts on competing annually
General. Lake Oswego Site Specific Information March 14, 2018
 General Lake Oswego Site Specific Information March 14, 2018 Lake Oswego Is a Thursday, Friday, Saturday event Day 1 is Thursday Day 2 is Friday Day 3 is Saturday To lessen confusion, the rest of this
General Lake Oswego Site Specific Information March 14, 2018 Lake Oswego Is a Thursday, Friday, Saturday event Day 1 is Thursday Day 2 is Friday Day 3 is Saturday To lessen confusion, the rest of this
Mechanical Systems. Section 1.0 Machines are tools that help humans do work. 1.1 Simple Machines- Meeting Human Needs Water Systems
 Unit 4 Mechanical Systems Section 1.0 Machines are tools that help humans do work. Define: machine- 1.1 Simple Machines- Meeting Human Needs Water Systems Then: Now: The earliest devices were devices.
Unit 4 Mechanical Systems Section 1.0 Machines are tools that help humans do work. Define: machine- 1.1 Simple Machines- Meeting Human Needs Water Systems Then: Now: The earliest devices were devices.
ROBOTAXI CONTEST TERMS AND CONDITIONS
 ROBOTAXI CONTEST TERMS AND CONDITIONS 1. Purpose Autonomous vehicles are no longer imaginary concepts as they were depicted in the 90s science fiction series. Today, many technology companies are conducting
ROBOTAXI CONTEST TERMS AND CONDITIONS 1. Purpose Autonomous vehicles are no longer imaginary concepts as they were depicted in the 90s science fiction series. Today, many technology companies are conducting
Functional Algorithm for Automated Pedestrian Collision Avoidance System
 Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Fuel Strategy (Exponential Decay)
") By Ten80 Education Fuel Strategy (Exponential Decay) STEM Lesson for TI-Nspire Technology Objective: Collect data and analyze the data using graphs and regressions to understand conservation of energy
By Ten80 Education Fuel Strategy (Exponential Decay) STEM Lesson for TI-Nspire Technology Objective: Collect data and analyze the data using graphs and regressions to understand conservation of energy
Lifting Mechanisms. Example 1: Two Stage Lift
 Lifting Mechanisms The primary scoring method for the 2018 game is to deposit fuel cubes into scoring zones. A manipulator fixed to your robot can deliver fuel cubes into ground level scoring zones, but
Lifting Mechanisms The primary scoring method for the 2018 game is to deposit fuel cubes into scoring zones. A manipulator fixed to your robot can deliver fuel cubes into ground level scoring zones, but
Colorado Junior Solar Sprint
 Colorado Junior Solar Sprint Overview The Junior Solar Sprint (JSS) Car Competition is a classroom-based, hands-on educational program for 6th, 7th, and 8th grade students. Student teams apply math, science,
Colorado Junior Solar Sprint Overview The Junior Solar Sprint (JSS) Car Competition is a classroom-based, hands-on educational program for 6th, 7th, and 8th grade students. Student teams apply math, science,
Autodesk's VEX Robotics Curriculum. Unit 9: Drivetrain Design 1
 Autodesk's VEX Robotics Curriculum Unit 9: Drivetrain Design 1 1 Overview In Unit 9: Drivetrain Design 1, you learn the basic principles of drivetrain design, build a basic VEX drivetrain, and test your
Autodesk's VEX Robotics Curriculum Unit 9: Drivetrain Design 1 1 Overview In Unit 9: Drivetrain Design 1, you learn the basic principles of drivetrain design, build a basic VEX drivetrain, and test your
APPENDIX A: Background Information to help you design your car:
 APPENDIX A: Background Information to help you design your car: Solar Cars: A solar car is an automobile that is powered by the sun. Recently, solar power has seen a large interest in the news as a way
APPENDIX A: Background Information to help you design your car: Solar Cars: A solar car is an automobile that is powered by the sun. Recently, solar power has seen a large interest in the news as a way
Safety and Preventitive Cautions for Teenage Drivers
 Safety and Preventitive Cautions for Teenage Drivers 1. Review the basic safety rules of driving 2. Learn and comprehend the safety issues involved in driving 3. Understand what factors affect safe driving
Safety and Preventitive Cautions for Teenage Drivers 1. Review the basic safety rules of driving 2. Learn and comprehend the safety issues involved in driving 3. Understand what factors affect safe driving
Manipulators. Example 1: The Claw
 Manipulators With these examples we will demonstrate some basic designs to accomplish each of the game piece challenges involved in the 2018 FIRST Global game Energy Impact to: 1. Collect fuel cubes and
Manipulators With these examples we will demonstrate some basic designs to accomplish each of the game piece challenges involved in the 2018 FIRST Global game Energy Impact to: 1. Collect fuel cubes and
THE RACING EVENT FOR THE WHOLE FAMILY THE FUSION OF VIRTUAL AND REAL RACING
 THE RACING EVENT FOR THE WHOLE FAMILY THE FUSION OF VIRTUAL AND REAL RACING SIMRACING, GAMING, RC & SLOT CARS, MODEL MAKING, BLANCPAIN GT SERIES ADAC s SimRacing Expo turns five with a bigger event than
THE RACING EVENT FOR THE WHOLE FAMILY THE FUSION OF VIRTUAL AND REAL RACING SIMRACING, GAMING, RC & SLOT CARS, MODEL MAKING, BLANCPAIN GT SERIES ADAC s SimRacing Expo turns five with a bigger event than
BEGINNER EV3 PROGRAMMING LESSON 1
 BEGINNER EV3 PROGRAMMING LESSON 1 Intro to Brick and Software, Moving Straight, Turning By: Droids Robotics www.ev3lessons.com SECTION 1: EV3 BASICS THE BRICK BUTTONS 1 = Back Undo Stop Program Shut Down
BEGINNER EV3 PROGRAMMING LESSON 1 Intro to Brick and Software, Moving Straight, Turning By: Droids Robotics www.ev3lessons.com SECTION 1: EV3 BASICS THE BRICK BUTTONS 1 = Back Undo Stop Program Shut Down
Soap Box Derby. Pacifica District Saturday, July 9 th
 Pacifica District 2011 Soap Box Derby Saturday, July 9 th Join us in El Segundo for Racing, Food, Music, and Fun! Organized by Pack 968 http://www.pack968.com For information: Julio Catzalco (310) 739-4035
Pacifica District 2011 Soap Box Derby Saturday, July 9 th Join us in El Segundo for Racing, Food, Music, and Fun! Organized by Pack 968 http://www.pack968.com For information: Julio Catzalco (310) 739-4035
DRIVERLESS SCHOOL BUS
 World Robot Olympiad 2019 WeDo Open Category Game Description, Rules and Evaluation SMART CITIES DRIVERLESS SCHOOL BUS Version: January 15 th WRO International Premium Partners INTRODUCTION... 2 1. CHALLENGE
World Robot Olympiad 2019 WeDo Open Category Game Description, Rules and Evaluation SMART CITIES DRIVERLESS SCHOOL BUS Version: January 15 th WRO International Premium Partners INTRODUCTION... 2 1. CHALLENGE
NOTE All entries must be checked in upon arrival at MESA Day.
 Hovercraft Challenge Level: Middle School Type of Contest: Team Composition of Team: 2 4 students per team Number of Teams: One entry per school Next Generation Science Standards: MS-ETS1-1., MS-ETS1-2.,
Hovercraft Challenge Level: Middle School Type of Contest: Team Composition of Team: 2 4 students per team Number of Teams: One entry per school Next Generation Science Standards: MS-ETS1-1., MS-ETS1-2.,
2017 Prairie Winds District Pinewood Derby Rules
 General Event Rules: 2017 Prairie Winds District Pinewood Derby Rules Essential Materials: All cars entered shall be constructed from the Official Grand Prix Pinewood Derby Kit (referred to below as the
General Event Rules: 2017 Prairie Winds District Pinewood Derby Rules Essential Materials: All cars entered shall be constructed from the Official Grand Prix Pinewood Derby Kit (referred to below as the
TURNS and - BIG BEND INFIELD PADDOCK
 TURNS and - BIG BEND TO TO INFIELD PADDOCK PIT PIT PIT PIT PIT OUT OUT OUT OUT OUT RUN-OFF AREA TI MAIN STRAIGHT Notes: Big Bend Big Bend has two approaches; either as a one apex turn or as a two apex
TURNS and - BIG BEND TO TO INFIELD PADDOCK PIT PIT PIT PIT PIT OUT OUT OUT OUT OUT RUN-OFF AREA TI MAIN STRAIGHT Notes: Big Bend Big Bend has two approaches; either as a one apex turn or as a two apex
2014 CHICKASAW DISTRICT PINEWOOD DERBY Hosted by: Pack 8
 2014 CHICKASAW DISTRICT PINEWOOD DERBY Hosted by: Pack 8 The Chickasaw District Pinewood Derby will be held on: SATURDAY, MARCH 15 th, 2014 This year's Derby will take place at: St. Mary on the Hill Catholic
2014 CHICKASAW DISTRICT PINEWOOD DERBY Hosted by: Pack 8 The Chickasaw District Pinewood Derby will be held on: SATURDAY, MARCH 15 th, 2014 This year's Derby will take place at: St. Mary on the Hill Catholic
THE HAIRPIN: Talking about sliding sideways,
 THE 3.107 MILE Autodromo de la Ciudad de Mexico track hosts the Mexican Grand Prix. It is the highest track in terms of elevation at about 5,000 feet above sea level. This reduces the amount of horsepower
THE 3.107 MILE Autodromo de la Ciudad de Mexico track hosts the Mexican Grand Prix. It is the highest track in terms of elevation at about 5,000 feet above sea level. This reduces the amount of horsepower
Northern Light District 2013 Pinewood derby
 Northern Light District 2013 Pinewood derby Saturday, March 9, 2013 Hope Community Church Hale Street Newburyport, MA Northern Light District 2013 Pinewood Derby Information and Registration Package Dear
Northern Light District 2013 Pinewood derby Saturday, March 9, 2013 Hope Community Church Hale Street Newburyport, MA Northern Light District 2013 Pinewood Derby Information and Registration Package Dear
Exploration 4: Rotorcraft Flight and Lift
 Exploration 4: Rotorcraft Flight and Lift Students use appropriate terminology to describe the various stages of flight and discover that the lift force changes with the amount of air moved by the rotor
Exploration 4: Rotorcraft Flight and Lift Students use appropriate terminology to describe the various stages of flight and discover that the lift force changes with the amount of air moved by the rotor
INTERNATIONAL FULL THROTTLE
 INTERNATIONAL FULL THROTTLE CONTENTS 1. Task 2. Design Specifications a. Radio Equipment b. Brake and Clutch Specifications c. Exhaust Rules d. Engine Specifications e. Dimensional Specifications f. Tires
INTERNATIONAL FULL THROTTLE CONTENTS 1. Task 2. Design Specifications a. Radio Equipment b. Brake and Clutch Specifications c. Exhaust Rules d. Engine Specifications e. Dimensional Specifications f. Tires
ECSE-2100 Fields and Waves I Spring Project 1 Beakman s Motor
 Names _ and _ Project 1 Beakman s Motor For this project, students should work in groups of two. It is permitted for groups to collaborate, but each group of two must submit a report and build the motor
Names _ and _ Project 1 Beakman s Motor For this project, students should work in groups of two. It is permitted for groups to collaborate, but each group of two must submit a report and build the motor
The Rules of the Rampaging Chariots Robotic Games 2015.
 The Rules of the Rampaging Chariots Robotic Games 2015. Competition 1. Each Rampaging Chariot may compete in up to three events. All robots compete in the Assault Course and Football. Teams also choose
The Rules of the Rampaging Chariots Robotic Games 2015. Competition 1. Each Rampaging Chariot may compete in up to three events. All robots compete in the Assault Course and Football. Teams also choose
IT'S MAGNETIC (1 Hour)
") IT'S MAGNETIC (1 Hour) Addresses NGSS Level of Difficulty: 4 Grade Range: 3-5 OVERVIEW In this activity, students will create a simple electromagnet using a nail, a battery, and copper wire. They will
IT'S MAGNETIC (1 Hour) Addresses NGSS Level of Difficulty: 4 Grade Range: 3-5 OVERVIEW In this activity, students will create a simple electromagnet using a nail, a battery, and copper wire. They will
Torsen Differentials - How They Work and What STaSIS Does to Improve Them For the Audi Quattro
 Torsen Differentials - How They Work and What STaSIS Does to Improve Them For the Audi Quattro One of the best bang-for-your buck products that STaSIS has developed is the center differential torque bias
Torsen Differentials - How They Work and What STaSIS Does to Improve Them For the Audi Quattro One of the best bang-for-your buck products that STaSIS has developed is the center differential torque bias
Unit 1: Energy and Motion
 5 5 Table of Contents Unit 1: Energy and Motion Chapter 5: Work and Machines 5.1: Work 5.2: Using Machines 5.3: Simple Machines 5.1 Work What is work? To many people, the word work means something they
5 5 Table of Contents Unit 1: Energy and Motion Chapter 5: Work and Machines 5.1: Work 5.2: Using Machines 5.3: Simple Machines 5.1 Work What is work? To many people, the word work means something they
The Kop Hill Soapbox Challenge 2018 Event Rules and Regulations
 The intention is to provide an extra curricular activity for children aged 10 to 17 to participate in the design, construction, maintenance and competition of a soapbox cart. An entry fee of 30 per team
The intention is to provide an extra curricular activity for children aged 10 to 17 to participate in the design, construction, maintenance and competition of a soapbox cart. An entry fee of 30 per team
OFFICIAL PACK 62 PINEWOOD DERBY RULES AND PROCEDURES
 OFFICIAL PACK 62 PINEWOOD DERBY RULES AND PROCEDURES Table of Contents: I. GENERAL RULES: (Applies to all Race Events) Rules about entering your car II. CUB SCOUT RACE CAR DESIGN STANDARDS Rules about
OFFICIAL PACK 62 PINEWOOD DERBY RULES AND PROCEDURES Table of Contents: I. GENERAL RULES: (Applies to all Race Events) Rules about entering your car II. CUB SCOUT RACE CAR DESIGN STANDARDS Rules about
2018 NORTHWEST DISTRICT PINEWOOD DERBY RULES
 2018 NORTHWEST DISTRICT PINEWOOD DERBY RULES Date: Saturday, March 24, 2018 Location: Epworth United Methodist Church Family Life Center 4855 Central Avenue, Toledo Ohio 43615 Check-in Times: Race Times
2018 NORTHWEST DISTRICT PINEWOOD DERBY RULES Date: Saturday, March 24, 2018 Location: Epworth United Methodist Church Family Life Center 4855 Central Avenue, Toledo Ohio 43615 Check-in Times: Race Times
MLGW 2018 A-BLAZING MODEL SOLAR CAR RACE RULES AND VEHICLE SPECIFICATIONS
 MLGW 2018 A-BLAZING MODEL SOLAR CAR RACE RULES AND VEHICLE SPECIFICATIONS The object of the MLGW A-BLAZING MODEL SOLAR CAR RACE is to design and build a vehicle that will complete a race in the shortest
MLGW 2018 A-BLAZING MODEL SOLAR CAR RACE RULES AND VEHICLE SPECIFICATIONS The object of the MLGW A-BLAZING MODEL SOLAR CAR RACE is to design and build a vehicle that will complete a race in the shortest
UTA Formula SAE Racecar Combustion and Electric
 UTA Formula SAE Racecar Combustion and Electric Dr. Bob Woods Professor of Mechanical Engineering Distinguished Teaching Professor Director, Arnold E. Petsche Center for Automotive Engineering Faculty
UTA Formula SAE Racecar Combustion and Electric Dr. Bob Woods Professor of Mechanical Engineering Distinguished Teaching Professor Director, Arnold E. Petsche Center for Automotive Engineering Faculty
The man with the toughest job in F1
 The man with the toughest job in F1 Tyres are the key to performance in Formula 1, and as Caterham s Head of Tyres, Peter Hewson s job is to know as much about them as possible. There s only one problem:
The man with the toughest job in F1 Tyres are the key to performance in Formula 1, and as Caterham s Head of Tyres, Peter Hewson s job is to know as much about them as possible. There s only one problem:
THE THIRTIETH-FIRST UBC PHYSICS OLYMPICS RULE BOOK. March 7, 2009
 THE THIRTIETH-FIRST UBC PHYSICS OLYMPICS RULE BOOK March 7, 2009 Financial sponsorship is provided by the Rex Boughton Memorial Fund. The UBC Physics Olympics is organized by the Department of Physics
THE THIRTIETH-FIRST UBC PHYSICS OLYMPICS RULE BOOK March 7, 2009 Financial sponsorship is provided by the Rex Boughton Memorial Fund. The UBC Physics Olympics is organized by the Department of Physics
Manipulators for FIRST FRC Robotics
 Manipulators for FIRST FRC Robotics FIRST Fare 2017 Bruce Whitefield Mentor, Team 2471 Manipulate What? Game pieces come in many sizes and shapes Manipulate How? Game objectives change each year Lift Dump
Manipulators for FIRST FRC Robotics FIRST Fare 2017 Bruce Whitefield Mentor, Team 2471 Manipulate What? Game pieces come in many sizes and shapes Manipulate How? Game objectives change each year Lift Dump
Andy Baker Mech. Engineering Mentor: 45 (1998-present) President and Co-owner: AndyMark, Inc Championship Woodie Flowers Award
 President and Co-owner: AndyMark, Inc Championship Woodie Flowers Award") Andy Baker Mech. Engineering Mentor: 45 (1998-present) President and Co-owner: AndyMark, Inc. 2003 Championship Woodie Flowers Award Articulating Arms Telescoping Lifts Grippers Latches Turrets Ball Handling
Andy Baker Mech. Engineering Mentor: 45 (1998-present) President and Co-owner: AndyMark, Inc. 2003 Championship Woodie Flowers Award Articulating Arms Telescoping Lifts Grippers Latches Turrets Ball Handling
Robot Construction, Wiring, and Safety
 Robot Construction, Wiring, and Safety SSI Robotics September 7, 2013 Capitol College Basic construction Build it strong Build it stable Build it to last Protect sensitive parts Gearing Make motors do
Robot Construction, Wiring, and Safety SSI Robotics September 7, 2013 Capitol College Basic construction Build it strong Build it stable Build it to last Protect sensitive parts Gearing Make motors do
Northwest Hills District PINEWOOD DERBY
 Northwest Hills District PINEWOOD DERBY OFFICIAL RULES AND REGULATIONS 2011-2012 1) GENERAL: 1A) The District Pinewood Derby will be hosted annually by the NWH District. 1B) The Pinewood Derby will be
Northwest Hills District PINEWOOD DERBY OFFICIAL RULES AND REGULATIONS 2011-2012 1) GENERAL: 1A) The District Pinewood Derby will be hosted annually by the NWH District. 1B) The Pinewood Derby will be
AIChE Chem-E-Car Competition Official Rules WCCE 2017 The objectives of the AIChE Chem-E-Car Competition are:
 AIChE Chem-E-Car Competition Official Rules WCCE 2017 The objectives of the AIChE Chem-E-Car Competition are: To provide chemical engineering students with the opportunity to participate in a team- oriented
AIChE Chem-E-Car Competition Official Rules WCCE 2017 The objectives of the AIChE Chem-E-Car Competition are: To provide chemical engineering students with the opportunity to participate in a team- oriented
Nemesis-TCS system manual release /11/2011 Author Mick Boasman. UK Tel
 Nemesis-TCS Traction Control System Firmware TCS 2 cylinder 1.21 onwards Firmware TCS 4 cylinder 1.08 onwards TC-Pod 1.05 WinTC Software 1.11 -User Onwards 2 cylinder WinTC Software 2.04 -User Onwards
Nemesis-TCS Traction Control System Firmware TCS 2 cylinder 1.21 onwards Firmware TCS 4 cylinder 1.08 onwards TC-Pod 1.05 WinTC Software 1.11 -User Onwards 2 cylinder WinTC Software 2.04 -User Onwards
TEST PROJECT / PROJET D ÉPREUVE MOBILE ROBOTICS ROBOTIQUE MOBILE SECONDARY / NIVEAU SECONDAIRE
 TEST PROJECT / PROJET D ÉPREUVE MOBILE ROBOTICS ROBOTIQUE MOBILE SECONDARY / NIVEAU SECONDAIRE Pipeline Page 2 of 25 Table of Contents 1. Definition of terms referenced in this document... 4 2. The Pipeline
TEST PROJECT / PROJET D ÉPREUVE MOBILE ROBOTICS ROBOTIQUE MOBILE SECONDARY / NIVEAU SECONDAIRE Pipeline Page 2 of 25 Table of Contents 1. Definition of terms referenced in this document... 4 2. The Pipeline
Introduction: Problem statement
 Introduction: Problem statement The goal of this project is to develop a catapult system that can be used to throw a squash ball the farthest distance and to be able to have some degree of accuracy with
Introduction: Problem statement The goal of this project is to develop a catapult system that can be used to throw a squash ball the farthest distance and to be able to have some degree of accuracy with
1x25 bar. 5x25 plate. 1x2x35 rail. 2x2x35 L. 3x3x35 L. 1x2x1x35 C. 1x3x1x35 C. 1x5x1x35 C
 STRUCTURE 1x25 bar 5x25 plate 45 degree gusset 90 degree flat gusset 1x2x25 rail 90 degree vertical gusset cross gusset 1x2x35 rail 2x2x35 L L gusset arc gusset 3x3x35 L hinge 90 degree corner gusset 1x2x1x35
STRUCTURE 1x25 bar 5x25 plate 45 degree gusset 90 degree flat gusset 1x2x25 rail 90 degree vertical gusset cross gusset 1x2x35 rail 2x2x35 L L gusset arc gusset 3x3x35 L hinge 90 degree corner gusset 1x2x1x35
OWNER S MANUAL SUPPLEMENT for Performance Computer with VFD display. New Features. Metric Operation. Metric/US config
 c OWNER S MANUAL SUPPLEMENT for Performance Computer with VFD display New Features Metric Operation New G-Meter Display Options 2-5 Other Improvements 6-7 Metric/US config Setup for Metric use 8-9 Metric
c OWNER S MANUAL SUPPLEMENT for Performance Computer with VFD display New Features Metric Operation New G-Meter Display Options 2-5 Other Improvements 6-7 Metric/US config Setup for Metric use 8-9 Metric
SCI ON TRAC ENCEK WITH
 WITH TRACK ON SCIENCE PART 1: GET GOING! What s It About? The Scout Association has partnered with HOT WHEELS, the COOLEST and most iconic diecast car brand to help Beavers and Cubs explore FUN scientific
WITH TRACK ON SCIENCE PART 1: GET GOING! What s It About? The Scout Association has partnered with HOT WHEELS, the COOLEST and most iconic diecast car brand to help Beavers and Cubs explore FUN scientific
VEX Classroom Lab Kit to PLTW VEX POE Conversion Kit
 Published: 03/22/20 Picture Part Description Number 275-88 Rack Gearbox Bracket (2-pack): Combines with the VEX linear slides & Rack Gears to create a linear actuator. Quantity 276-096 Linear Slide (2-pack):
Published: 03/22/20 Picture Part Description Number 275-88 Rack Gearbox Bracket (2-pack): Combines with the VEX linear slides & Rack Gears to create a linear actuator. Quantity 276-096 Linear Slide (2-pack):
GSEM District 14 Neighborhood 6 Powder Puff Derby Official Rules
 GSEM District 14 Neighborhood 6 Powder Puff Derby - 2017 Official Rules The Powder Puff Derby is modeled after Boy Scouts of America s Pinewood Derby. What is a Powder Puff Derby? A bunch of fun! At the
GSEM District 14 Neighborhood 6 Powder Puff Derby - 2017 Official Rules The Powder Puff Derby is modeled after Boy Scouts of America s Pinewood Derby. What is a Powder Puff Derby? A bunch of fun! At the
Roehrig Engineering, Inc.
 Roehrig Engineering, Inc. Home Contact Us Roehrig News New Products Products Software Downloads Technical Info Forums What Is a Shock Dynamometer? by Paul Haney, Sept. 9, 2004 Racers are beginning to realize
Roehrig Engineering, Inc. Home Contact Us Roehrig News New Products Products Software Downloads Technical Info Forums What Is a Shock Dynamometer? by Paul Haney, Sept. 9, 2004 Racers are beginning to realize
2010 National Edition correlated to the. Creative Curriculum Teaching Strategies Gold
 2010 National Edition correlated to the Creative Curriculum Teaching Strategies Gold 2015 Big Day for PreK is a proven-effective comprehensive early learning program that embraces children's natural curiosity
2010 National Edition correlated to the Creative Curriculum Teaching Strategies Gold 2015 Big Day for PreK is a proven-effective comprehensive early learning program that embraces children's natural curiosity
University of San Diego 2017 SAE Baja
 University of San Diego 2017 SAE Baja Society of Automotive Engineers University of San Diego Student Chapter University of San Diego SAE Shiley Marcos School of Engineering 5998 Alcala Park San Diego,
University of San Diego 2017 SAE Baja Society of Automotive Engineers University of San Diego Student Chapter University of San Diego SAE Shiley Marcos School of Engineering 5998 Alcala Park San Diego,
Pinewood Derby 101. Pack 59
 Pinewood Derby 101 Pack 59 Pinewood Derby 101 What is the Pinewood Derby? Every scout creates a pinewood derby race car using the supplied kit Scouts will race their cars in a number of heats based on
Pinewood Derby 101 Pack 59 Pinewood Derby 101 What is the Pinewood Derby? Every scout creates a pinewood derby race car using the supplied kit Scouts will race their cars in a number of heats based on