Manipulators for FIRST FRC Robotics
|
|
|
- Oscar Johnston
- 6 years ago
- Views:
Transcription

1 Manipulators for FIRST FRC Robotics FIRST Fare 2017 Bruce Whitefield Mentor, Team 2471


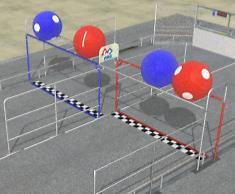










2 Manipulate What? Game pieces come in many sizes and shapes







3 Manipulate How? Game objectives change each year Lift Dump Hang Stack Kick Gather Throw Fling
4 Where to Start? Know the Objectives Read game & robot rules Define your game strategy Test the game pieces Things that Manipulate Manipulators Allowed by Rules Learn what works Look on line Talk to mentors Talk to other teams Your Design Understand your capability Tools & Skills, Materials, Manpower Budget, Time Manipulators you can build Stuff That Doesn t Work Stuff you can t build
5 Reoccurring Themes FIRST Definition of a Manipulator A device that moves the game piece from where it is to where it needs to be. Lift & Reach o o o Articulating Arms Parallel arms Telescoping Lifts Grab & Grip o o o Rollers Clamps Claws Collect and Deliver o o o o o Conveyers Turrets Shooters Kickers Buckets o Climb and Winch o o o o o o Winches Brakes Latches Pneumatics Springs / Bungee Gears & Sprockets



6 Arms Shoulder Elbow Wrist
7 Torque & Weight limits arm length. Torque = Force x Distance o Measure from the pivot point o Different angle = different torque o Maximum at 90 degrees W= 10 lbs Torque = W x D Torque = W x D/2 W=10 lbs 1/2 D D
8 Power & Torque Limit Speed Power determines how fast you can move things Power = Torque / Time or Torque x Rotational Velocity Counter weight or springs can help 3 ft 10 lbs

9 Arm Design Tips Dr. Claw in 2014 Lightweight Materials: Thin wall tubes, lightening holes Concentrate weight near pivot Use sensors for feedback & control Limit switches Potentiometers Encoders Keep it stiff Use counterbalances Spring, weight, pneumatic, bungee Calculate the forces Check for center of gravity May tip when arm is extended Model reach & orientation KISS your arms Less parts to build. Less parts to break
 Difficult to build well. Not recommended without prior experience.")
10 Telescoping Lifts Scissor Lift Motion achieved by unfolding crossed members High stress loads at beginning of travel (spring assist can start movement) Difficult to build well. Not recommended without prior experience. Extension Lifts Motion achieved by stacked members sliding on each other

11 Extension Lift Rigging Continuous Each stage moves faster than one below. Don t underestimate power Brake or ratchet to hold a position. Same speed for pull-up and pulldown cables More complex cable routing Different speeds of Pull-up and pull-down cables. Can be handled by different drum diameters Higher tension on the lower stage cables
12 Extension Lift Design tips Drive both and down, or add a return spring. Segments must move freely Minimize slop and free-play Segment overlap for stability 20% minimum More for bottom, less for top Stiffness and strength needed Minimize weight, especially at top

13 Arms vs. Lifts Feature Arm Lift Reach over object Yes No * Get up after tipping Perhaps, if strong No Complexity Moderate High Weight capacity Moderate High Go under barriers Yes, folds down Maybe, limits lift height Center of gravity Cantilevered Central mass Operating space Large swing space Compact Adding reach More articulations More lift sections Combinations Arm with extender Lift with arm on top


14 Get a Grip FIRST definition of a gripper: Device that grabs a game object and releases it when needed. Design Concerns Getting object into grip Hanging on Speed of grip and release Position control Location of weight Especially if at end of arm Lot of Methods Pneumatic claws /clamps 1 axis 2 axis Motorized claw or clamp Rollers Hoop grips Suction


15 Claw or clamp Pneumatic One fixed arm Hollow claw to reduce weight One or two moving sides 768 in 2008


16 Pneumatic: 2 and 3 point clamps Pneumatic Cylinder extends & retracts linkage to open and close gripper Combined arm and gripper Easy to make Easy to control Quick grab Limited grip force Use 3 fingers for 2-axis grip 968 in in 2004

17 Motorized clamp Generally slower Not good for frequent grabs Okay for a few grabs per game or heavy objects More complex and heavier Due to gearing & motors Tunable force No pneumatics 49 in 2001

18 Suction Grips Needs vacuum generator Suction cups to grab Requires precise placement. No grab until a seal is made May fail if suction cup is damaged Not recommended for heavy or irregular game pieces Used effectively to hold soccer balls in place for kickers (Breakaway 2010)




19 Roller Grips Allows for misalignment when grabbing Won t let go Extends object while releasing Simple mechanism Use sensors to detect position. Many variations Mixed roller & conveyer Reverse top and bottom roller direction to rotate object 148 in 2007

20 Counter Rotating Methods The Infinity Belt Many ways to achieve counter rotating shafts. Here are few configurations that can run off a single motor or gearbox. Can also drive each side with separate motors Stacked pulleys on single drive shaft Counter rotating gearbox
21 Gripper Design Hang On! High friction surfaces Rubber, neoprene, silicone, sandpaper but don t damage game pieces Force: Highest at grip point 2 to 4 x object weight Extra axis of grip = More control buy more complexity Need for speed Wide capture window Quickness counts Quick to grab, Drop & re-grab Fast : Pneumatic gripper. Not so fast: Motor gripper Make it easy to control Limit switches, Auto-functions Intuitive driver controls

22 Rotating Turrets Tube or post (recommended) Lazy Susan (not for high loads) Use when appropriate o One Goal = good o Nine Goals = not so good o Fixed targets = good o Moving targets = not so good Bearing structure must be solid Rotating large weights can be slow Include sensor feedback o Know where its pointing o Auto aiming is often needed


23 Gathering: Accumulators & Conveyers Accumulator: Collects multiple objects Horizontal rollers: gather balls & other objects from floor Vertical rollers: push balls up or down Wheels: good for big objects Can also use to dispense objects out of robot
 Solution #2 - Individual rollers - Adds")
24 Conveyers: Moving multiple objects Moving multiple objects from point A to point B within the robot Why do balls jam on belts? - Stick and rub against each other as they try to rotate along the conveyor Solution #1 - Slippery material for the non-moving surface (Teflon, pebble surface) Solution #2 - Individual rollers - Adds weight and complexity Solution #3 - Pairs of belts - Support against tension 1 2 3




25 Conveyer Examples Tower Rollers Belts Solution 1 Solution 2 Solution 3



26 Integrated collector and Accumulator Control the objects Avoid gravity feeds Slow and easily jammed Direct the flow. Reduce random movement Not all game objects are created equal Variations in size, inflation, etc Build adaptive or adjustable systems Test with different sizes, inflation, etc. 173



27

28 Shooters Secure shooting structure = more accuracy Feed balls (or disks) individually, controlling flow Rotating tube or wheel One wheel or two counter rotating High speed & power: rpm Brace for vibration Protect for safety Turret allows for aiming Sensors detect ball presence & shot direction Circular Conveyer. One cylindrical roller inside. Rolling surface around outside 1771 in 2009



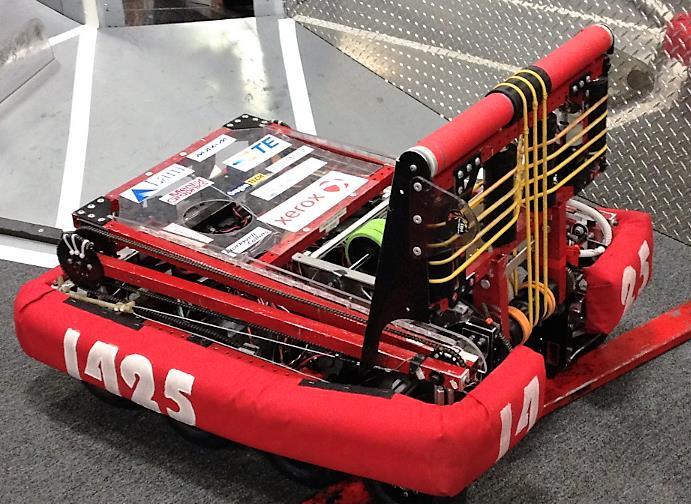
29 Frisbee Fling: Wheel rotates disc against a flat or curved surface. High speed ~5000 rpm Long surface & wheel contact time needed to get disc up to speed. 2 wheel stages for linear shooters 1 wheel for curved shooters 1425 in 2013


30 Buckets and Tables Use for dumping many objects Integrate with your accumulator and conveyer Keep it light. Heavy buckets move slow Many ways to actuate. Pneumatic, spring, gear, winch 488 in 2009



31 Winches Many uses Climbing Robots: 2000, 2004, 2010, , 2017 Lifting Robots: 2007 Loading Kickers 2010, 2014 Lifting Totes: 2015 High torque application Can fit into limited space Good for pulling or lifting
32 Return cable or spring Winch Design Capture the cable Secure the cable routing Smooth winding & unwinding Leave room on drum for wound up cable Guide the cable Must have tension on cable to unwind Can use cable in both directions Spring or bungee return Gravity return not recommended except after match ends Calculate the torque and speed Ratchet or brake to hold a position. Guide the cable Maintain Tension Brake or ratchet


33 Kickers and Catapults Sudden release of stored energy: Springs, Bungee, Pneumatic Design & test a good latch mechanism Secure lock for safety Fast release Also good for once in a game actions minibot release








34 Latches Hook & hold to grab goals, bars, etc. Hold stored power until needed Spring or bungee Several ways: Hooks Locking wheels Pins Start latch design early. Tend to be afterthoughts Don t forget the safety pin Self latching wheel lock Basic Latch Safety pin Removed before match Bevel for auto re-latch Release push at end of lever to reduce force needed Spring return and stop Roller to easy release Strong pivot in line with force held for secure latch


35 Design in Safety Any manipulator strong enough to play the game is strong enough to hurt someone. Design in locking pins, safety signs and safe stop points
36 Summary Know your design objectives and game strategy Stay within your capabilities Look around. See what works Design it before you build it Calculate the forces and speeds Understand the dimensions using CAD or models Keep it simple and make it well Poor craftsmanship can ruin the best design Test. Test. Test. Under many conditions Refine the design based on results Have fun doing it.
37 Appendix







38 Acknowledgements Many thanks to teams and companies who made materials for this presentation freely available on web sites to help FIRST students. Andy Baker s original presentation and inspiration for this seminar is available on line. There are many examples and resources available. Be sure to use them when planning your robot designs.
39 Motor Power: Assuming 100% power transfer efficiency: All motors can lift the same amount they just do it at different rates. No power transfer mechanisms are 100% efficient Inefficiencies due to friction, binding, etc. Spur gears ~ 90% Chain sprockets ~ 80% Worm gears ~ 70% Planetary gears ~80% Calculate the known inefficiencies and then design in a safety factor (2x to 4x) Stall current can trip the breakers It adds up! 2 spur gears + sprocket =.9 x.9 x.8 =.65 Losing 35% of power to the drive train
40 Parallel Arms Pin loading can be very high Watch for buckling in lower arm Has limited range rotation Keeps gripper in fixed orientation
41 Scissor Lifts Advantages Minimum retracted height - can go under field barriers Disadvantages Tends to be heavy when made stable enough Doesn t deal well with side loads Must be built very precisely Stability decreases as height increases Stress loads very high at beginning of travel Not recommend without prior experience

42 Pneumatic latch, solidly grabs pipe Force and friction only No smart mechanism Spring-loaded latch Motorized release Smart Mechanism 469 in 2003



43 Parallel arm Fixed Arm Jointed Arm
44 Ratchet - Complete lock in one direction in discrete increments Clutch Bearing - Completely lock in one direction any spot Brake pads - Squeezes on a rotating device to stop motion - can lock in both directions. Simple device Disc brakes - Like those on your mountain bike Gear brakes - Apply to lowest torque gear in gearbox Belt Brake- Strap around a drum or pulley Dynamic Breaking by motors lets go when power is lost. Use for control, but not for safety or end game Gearbox that cannot be back-driven is usually an inefficient one.
 Sensor met and automatic command given")
45 Start design early. Latches tend to be afterthoughts but are often a critical part of the operation Don t depend on driver to latch, use a smart mechanism Spring loaded (preferred) Sensor met and automatic command given Use operated mechanism to let go, not to latch Have a secure latch Don t want release when robots crash Be able to let go quickly Pneumatic lever Motorized winch, pulling a string Cam on a gear motor Servo (light release force only) Don t forget a safety pin or latch for when you are working on the robot

46 Continuous Internal Pull-down cable routed on reverse route of pull-up cable Most complex cable routing All stages have active return Cleaner and protected cables Drum differential not needed. Stage2 Slider (Stage3) Stage1 Base


47 Combination Example: Continuous direct drive chain runs stage 1 up and down Drum differential not needed Telescoping arm with wrist on slider stage to add reach 2011
Andy Baker Mech. Engineering Mentor: 45 (1998-present) President and Co-owner: AndyMark, Inc Championship Woodie Flowers Award
 President and Co-owner: AndyMark, Inc Championship Woodie Flowers Award") Andy Baker Mech. Engineering Mentor: 45 (1998-present) President and Co-owner: AndyMark, Inc. 2003 Championship Woodie Flowers Award Articulating Arms Telescoping Lifts Grippers Latches Turrets Ball Handling
Andy Baker Mech. Engineering Mentor: 45 (1998-present) President and Co-owner: AndyMark, Inc. 2003 Championship Woodie Flowers Award Articulating Arms Telescoping Lifts Grippers Latches Turrets Ball Handling
Manipulators. Basic/Background Info Types of Manipulators General Manipulator design tips
 FTC Manipulators By: Zach Zakfeld (Enigma Robotics) Teams: FTC 5391, FTC 5385 and FRC 2075 *Some images in this presentation are of FRC robots so exact designs may not be applicable, however all of the
FTC Manipulators By: Zach Zakfeld (Enigma Robotics) Teams: FTC 5391, FTC 5385 and FRC 2075 *Some images in this presentation are of FRC robots so exact designs may not be applicable, however all of the
SuperQuest Salem Arms Best Practices
 SuperQuest Salem Arms Best Practices VEX Arm Designs Single 4-Bar 6-Bar 8-Bar Linear Slide Scissor Double Reverse 4-Bar Single Arms Arms These manipulators consist of a pivot point and at least 1 motor.
SuperQuest Salem Arms Best Practices VEX Arm Designs Single 4-Bar 6-Bar 8-Bar Linear Slide Scissor Double Reverse 4-Bar Single Arms Arms These manipulators consist of a pivot point and at least 1 motor.
How to Build with the Mindstorm Kit
 How to Build with the Mindstorm Kit There are many resources available Constructopedias Example Robots YouTube Etc. The best way to learn, is to do Remember rule #1: don't be afraid to fail New Rule: don't
How to Build with the Mindstorm Kit There are many resources available Constructopedias Example Robots YouTube Etc. The best way to learn, is to do Remember rule #1: don't be afraid to fail New Rule: don't
Driver Driven. InputSpeed. Gears
 Gears Gears are toothed wheels designed to transmit rotary motion and power from one part of a mechanism to another. They are fitted to shafts with special devices called keys (or splines) that ensure
Gears Gears are toothed wheels designed to transmit rotary motion and power from one part of a mechanism to another. They are fitted to shafts with special devices called keys (or splines) that ensure
After Kickoff, we immediately began the design process by reviewing the game rules with the entire team. During this step, we also looked over the
 After Kickoff, we immediately began the design process by reviewing the game rules with the entire team. During this step, we also looked over the field specifications. We continued development by determining
After Kickoff, we immediately began the design process by reviewing the game rules with the entire team. During this step, we also looked over the field specifications. We continued development by determining
Changes in direction.! Using pulleys with belts
 Mechanisms Changes in direction! Using pulleys with belts Changes in direction! Using friction wheels Changes in direction! Using gears Worm drive! Reduces the speed! It is non-reversible Worm drive! Multiple
Mechanisms Changes in direction! Using pulleys with belts Changes in direction! Using friction wheels Changes in direction! Using gears Worm drive! Reduces the speed! It is non-reversible Worm drive! Multiple
Lifting Mechanisms. Example 1: Two Stage Lift
 Lifting Mechanisms The primary scoring method for the 2018 game is to deposit fuel cubes into scoring zones. A manipulator fixed to your robot can deliver fuel cubes into ground level scoring zones, but
Lifting Mechanisms The primary scoring method for the 2018 game is to deposit fuel cubes into scoring zones. A manipulator fixed to your robot can deliver fuel cubes into ground level scoring zones, but
Moments. It doesn t fall because of the presence of a counter balance weight on the right-hand side. The boom is therefore balanced.
 Moments The crane in the image below looks unstable, as though it should topple over. There appears to be too much of the boom on the left-hand side of the tower. It doesn t fall because of the presence
Moments The crane in the image below looks unstable, as though it should topple over. There appears to be too much of the boom on the left-hand side of the tower. It doesn t fall because of the presence
MECHANISMS. AUTHORS: Santiago Camblor y Pablo Rivas INDEX
 MECHANISMS AUTHORS: Santiago Camblor y Pablo Rivas INDEX 1 INTRODUCTION 2 LEVER 3 PULLEYS 4 BELT AND PULLEY SYSTEM 5 GEARS 6 GEARS WITH CHAIN 7 WORM GEAR 8 RACK AND PINION 9 SCREW AND NUT 10 CAM 11 ECCENTRIC
MECHANISMS AUTHORS: Santiago Camblor y Pablo Rivas INDEX 1 INTRODUCTION 2 LEVER 3 PULLEYS 4 BELT AND PULLEY SYSTEM 5 GEARS 6 GEARS WITH CHAIN 7 WORM GEAR 8 RACK AND PINION 9 SCREW AND NUT 10 CAM 11 ECCENTRIC
Clutches for Automobiles and Light Trucks
 Clutches for Automobiles and Light Trucks What does the Clutch do? Connects the engine torque to transmission when ENGAGED Unhooks engine from transmission when DISENGAGED Where is the driver s foot when
Clutches for Automobiles and Light Trucks What does the Clutch do? Connects the engine torque to transmission when ENGAGED Unhooks engine from transmission when DISENGAGED Where is the driver s foot when
TYPICAL EXPERIMENTS Centers of gravity. Force triangle. Force polygon and Bow s Notation. Non- concurrent forces.
 MM 500-001 BASIC PANEL The panel is made from a perforated stainless steel sheet mounted on two supports with adjustable footings. The panel can be tilted, put in portrait or landscape position. Accessories
MM 500-001 BASIC PANEL The panel is made from a perforated stainless steel sheet mounted on two supports with adjustable footings. The panel can be tilted, put in portrait or landscape position. Accessories
Manipulators. Example 1: The Claw
 Manipulators With these examples we will demonstrate some basic designs to accomplish each of the game piece challenges involved in the 2018 FIRST Global game Energy Impact to: 1. Collect fuel cubes and
Manipulators With these examples we will demonstrate some basic designs to accomplish each of the game piece challenges involved in the 2018 FIRST Global game Energy Impact to: 1. Collect fuel cubes and
INDEX. 414 Agitator reversing mechanism which varies point of reversal. 250 Alternate and intermittent drive for two shafts
 INDEX Agitating device for pin hopper.----------------------------------------- 414 Agitator reversing mechanism which varies point of reversal. 250 Alternate and intermittent drive for two shafts.-----.----------.--..--
INDEX Agitating device for pin hopper.----------------------------------------- 414 Agitator reversing mechanism which varies point of reversal. 250 Alternate and intermittent drive for two shafts.-----.----------.--..--
INDEX. PAGE Adjustment mechanism for radial position of block on rotating
 INDEX Adjustment mechanism for radial position of block on rotating arm 520 Amplifying mechanism for precision measuring instruments--491 Angular movement, crank and link mechanisms for increasing 251,
INDEX Adjustment mechanism for radial position of block on rotating arm 520 Amplifying mechanism for precision measuring instruments--491 Angular movement, crank and link mechanisms for increasing 251,
Robot Preparation for the VEX World Championship/ US Open. Lessons learned over the past 6 years by David Kelly 2013 VWC, Teacher of the Year
 Robot Preparation for the VEX World Championship/ US Open Lessons learned over the past 6 years by David Kelly 2013 VWC, Teacher of the Year Re-designing Re-designing your robot to a new concept yields
Robot Preparation for the VEX World Championship/ US Open Lessons learned over the past 6 years by David Kelly 2013 VWC, Teacher of the Year Re-designing Re-designing your robot to a new concept yields
Mechanical Power Transmission. September 16, 2008
 2008 TE Sessions Supported by Mechanical Power Transmission September 16, 2008 www.robojackets.org Goals Hand out kits to teams that don t have one. More physics concepts and terms Understanding key devices
2008 TE Sessions Supported by Mechanical Power Transmission September 16, 2008 www.robojackets.org Goals Hand out kits to teams that don t have one. More physics concepts and terms Understanding key devices
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
INDIAN INSTITUTE OF TECHNOLOGY KHARAGPUR NPTEL ONLINE CERTIFICATION COURSE. On Industrial Automation and Control
 INDIAN INSTITUTE OF TECHNOLOGY KHARAGPUR NPTEL ONLINE CERTIFICATION COURSE On Industrial Automation and Control By Prof. S. Mukhopadhyay Department of Electrical Engineering IIT Kharagpur Topic Lecture
INDIAN INSTITUTE OF TECHNOLOGY KHARAGPUR NPTEL ONLINE CERTIFICATION COURSE On Industrial Automation and Control By Prof. S. Mukhopadhyay Department of Electrical Engineering IIT Kharagpur Topic Lecture
CHAPTER 6 GEARS CHAPTER LEARNING OBJECTIVES
 CHAPTER 6 GEARS CHAPTER LEARNING OBJECTIVES Upon completion of this chapter, you should be able to do the following: Compare the types of gears and their advantages. Did you ever take a clock apart to
CHAPTER 6 GEARS CHAPTER LEARNING OBJECTIVES Upon completion of this chapter, you should be able to do the following: Compare the types of gears and their advantages. Did you ever take a clock apart to
Contents. Overview Pinsetter Orientation...1-4
 Contents Overview...1-3 Pinsetter Orientation...1-4 Pinsetter Description...1-5 Ball Pit...1-5 Ball Cushion...1-5 Transport Band...1-7 Ball Accelerator...1-8 Pin Elevator...1-10 Distributor...1-14 Setting
Contents Overview...1-3 Pinsetter Orientation...1-4 Pinsetter Description...1-5 Ball Pit...1-5 Ball Cushion...1-5 Transport Band...1-7 Ball Accelerator...1-8 Pin Elevator...1-10 Distributor...1-14 Setting
Deriving Consistency from LEGOs
 Deriving Consistency from LEGOs What we have learned in 6 years of FLL by Austin and Travis Schuh Objectives Basic Building Techniques How to Build Arms and Drive Trains Using Sensors How to Choose a Programming
Deriving Consistency from LEGOs What we have learned in 6 years of FLL by Austin and Travis Schuh Objectives Basic Building Techniques How to Build Arms and Drive Trains Using Sensors How to Choose a Programming
Courtesy of CMA/Flodyne/Hydradyne Motion Control Hydraulic Pneumatic Electrical Mechanical (800)
") P01 LinMot P is a family of linear direct drives for highly dynamic motions. The motor is made up of just two parts: the slider and the stator. The two parts are not connected by brushes or cables. The
P01 LinMot P is a family of linear direct drives for highly dynamic motions. The motor is made up of just two parts: the slider and the stator. The two parts are not connected by brushes or cables. The
Product design: Mechanical systems
 Product design: Mechanical systems Recall Mechanisms can: change direction of movement, e.g. from clockwise to anticlockwise or from horizontal to vertical; change type of movement, e.g. from rotating
Product design: Mechanical systems Recall Mechanisms can: change direction of movement, e.g. from clockwise to anticlockwise or from horizontal to vertical; change type of movement, e.g. from rotating
Differential Rewind Shafts
 Differential Rewind Shafts More accurate tension control for light tension applications. Dynamically balanced central shaft. Suitable for cardboard and all types of plastic cores. Easier loading of cores
Differential Rewind Shafts More accurate tension control for light tension applications. Dynamically balanced central shaft. Suitable for cardboard and all types of plastic cores. Easier loading of cores
ME 455 Lecture Ideas, Fall 2010
 ME 455 Lecture Ideas, Fall 2010 COURSE INTRODUCTION Course goal, design a vehicle (SAE Baja and Formula) Half lecture half project work Group and individual work, integrated Design - optimal solution subject
ME 455 Lecture Ideas, Fall 2010 COURSE INTRODUCTION Course goal, design a vehicle (SAE Baja and Formula) Half lecture half project work Group and individual work, integrated Design - optimal solution subject
Dynaweb, Inc. EP350 Dancer Tension Controller. Instruction Manual
 Dynaweb, Inc. EP350 Dancer Tension Controller Instruction Manual 1 DYNAWEB, INC July 1, 2010 Page# INSTALLATION 2 START-UP, POWER OFF, NO WEB 2 START-UP, POWER ON, NO WEB 3 START-UP, POWER ON, WEB UP MACHINE
Dynaweb, Inc. EP350 Dancer Tension Controller Instruction Manual 1 DYNAWEB, INC July 1, 2010 Page# INSTALLATION 2 START-UP, POWER OFF, NO WEB 2 START-UP, POWER ON, NO WEB 3 START-UP, POWER ON, WEB UP MACHINE
Stopping Accuracy of Brushless
 Stopping Accuracy of Brushless Features of the High Rigidity Type DGII Series Hollow Rotary Actuator The DGII Series hollow rotary actuator was developed for positioning applications such as rotating a
Stopping Accuracy of Brushless Features of the High Rigidity Type DGII Series Hollow Rotary Actuator The DGII Series hollow rotary actuator was developed for positioning applications such as rotating a
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Dallas BEST 2014 Blade Runner
 Dallas BEST 2014 Blade Runner Software Training 1 Easy C software training If needed, get your 150day EasyC licence code at Rkit pickup. Must run as admin to install EasyC license. RobotC and Simulink
Dallas BEST 2014 Blade Runner Software Training 1 Easy C software training If needed, get your 150day EasyC licence code at Rkit pickup. Must run as admin to install EasyC license. RobotC and Simulink
UNIT-2 ROBOT DRIVE SYSTEMS AND END EFFECTORS
 UNIT-2 ROBOT DRIVE SYSTEMS AND END EFFECTORS CONTENTS 2.1 Pneumatic Drives 2.2 Hydraulic Drives 2.3 Mechanical Drives 2.4 Electrical Drives 2.5 D.C. Servo Motors 2.6 Stepper Motor 2.7 A.C. Servo Motors
UNIT-2 ROBOT DRIVE SYSTEMS AND END EFFECTORS CONTENTS 2.1 Pneumatic Drives 2.2 Hydraulic Drives 2.3 Mechanical Drives 2.4 Electrical Drives 2.5 D.C. Servo Motors 2.6 Stepper Motor 2.7 A.C. Servo Motors
Rules 1. The competition is open to one year 7 class from each school.
 Name of school: Names of team members: Team name: Name of Water wheel: Mission Water wheel Your task, should you choose to accept it, is a race against time to create a water wheel made entirely of scrap
Name of school: Names of team members: Team name: Name of Water wheel: Mission Water wheel Your task, should you choose to accept it, is a race against time to create a water wheel made entirely of scrap
CNC Robots. WITTMANN Named a Best Buy for Robots. Technology working for you.
 CNC Robots WITTMANN Named a Best Buy for Robots Technology working for you. The Innovative Robot Concept Decades of application experience and innovative developments have made the WITTMANN robots what
CNC Robots WITTMANN Named a Best Buy for Robots Technology working for you. The Innovative Robot Concept Decades of application experience and innovative developments have made the WITTMANN robots what
Issaquah Robotics Society 1318 Issaquah High School - Washington. Engineering Notebook 2018 Season
 Issaquah Robotics Society 1318 Issaquah High School - Washington Engineering Notebook 2018 Season Table of Contents 1. Engineering Story 2. Our Product Cycle 3. The Game Summary Tasks & Points 4. Strategy
Issaquah Robotics Society 1318 Issaquah High School - Washington Engineering Notebook 2018 Season Table of Contents 1. Engineering Story 2. Our Product Cycle 3. The Game Summary Tasks & Points 4. Strategy
Candy Coup-Link OVER YEARS OF INNOVATION
 Candy Coup-Link Zero-backlash, flexible-shaft couplings High torque, excellent response Accommodates misalignment and shaft endplay Aluminum and stainless steel options Inch and metric bores available
Candy Coup-Link Zero-backlash, flexible-shaft couplings High torque, excellent response Accommodates misalignment and shaft endplay Aluminum and stainless steel options Inch and metric bores available
2008, K&M NEWSPAPER SERVICES, INC. INSERTER 2299 INSERTER
 99 INSERTER - - - 800-88-0 COMPLETE FIXED POCKET WALL ITEM PART # DESCRIPTION QUANTITY KMS 0CW COMPLETE POCKET WALL COMES ASSEMBLED WITH YOUR CHOICE OF GRIPPERS & PADDLES - - - 800-88-0 FIXED POCKET WALL
99 INSERTER - - - 800-88-0 COMPLETE FIXED POCKET WALL ITEM PART # DESCRIPTION QUANTITY KMS 0CW COMPLETE POCKET WALL COMES ASSEMBLED WITH YOUR CHOICE OF GRIPPERS & PADDLES - - - 800-88-0 FIXED POCKET WALL
2017 FLYSET FTC Workshop. Hosted by
 2017 FLYSET FTC Workshop Hosted by Hardware Topics Session Evan / Abhishek contributed by Austin / Derek Melody / Audrey from FTC team #12810 Agenda Harvester mechanism comparison Shooter mechanism comparison
2017 FLYSET FTC Workshop Hosted by Hardware Topics Session Evan / Abhishek contributed by Austin / Derek Melody / Audrey from FTC team #12810 Agenda Harvester mechanism comparison Shooter mechanism comparison
Drive Essentials. robot. -Andy Baker
 Drive Essentials The best drive train is more important than anything else on the robot meets your strategy goals can be built with your resources rarely needs maintenance can be fixed within 4 minutes
Drive Essentials The best drive train is more important than anything else on the robot meets your strategy goals can be built with your resources rarely needs maintenance can be fixed within 4 minutes
MACHINE SENSORS CONTROL PANEL CONVEYOR SYSTEM SYSTEM SENSORS...
 TABLE OF CONTENTS TABLE OF CONTENTS... 1 CONTROL PANEL...... 4 MACHINE SENSORS... 5 CONVEYOR SYSTEM... 6 SYSTEM SENSORS... 6 INFEED BACKUP... 6 OUTFEED BACKUP... 6 CHANGEOVERS... 6 CONVEYOR GUIDES ADJUSTMENTS...
TABLE OF CONTENTS TABLE OF CONTENTS... 1 CONTROL PANEL...... 4 MACHINE SENSORS... 5 CONVEYOR SYSTEM... 6 SYSTEM SENSORS... 6 INFEED BACKUP... 6 OUTFEED BACKUP... 6 CHANGEOVERS... 6 CONVEYOR GUIDES ADJUSTMENTS...
Marine Engineering Exam Resource Review of Couplings
 1. What are rigid couplings used for? Used to join drive shafts together. True alignment and rigidity are required. Example Drive shafts and production lines, bridge cranes, solid shaft that needs to be
1. What are rigid couplings used for? Used to join drive shafts together. True alignment and rigidity are required. Example Drive shafts and production lines, bridge cranes, solid shaft that needs to be
Technical Robustness and Quality
 Technical Robustness and Quality www.teamrush27.net Rock Solid Robot Page Title 1-4 Robustness In Concept And Fabrication 5 Creative Concepts For Tomorrow s Technology 6-8 Rock Solid Controls 9-10 Effectively
Technical Robustness and Quality www.teamrush27.net Rock Solid Robot Page Title 1-4 Robustness In Concept And Fabrication 5 Creative Concepts For Tomorrow s Technology 6-8 Rock Solid Controls 9-10 Effectively
Polymers Outperform Metals In Precision Gearing
 WHITE PAPER Power of knowledge engineering Polymers Outperform Metals In Precision Gearing Some of the most innovative gears today are not made from metal or injection-molded plastics but from machined
WHITE PAPER Power of knowledge engineering Polymers Outperform Metals In Precision Gearing Some of the most innovative gears today are not made from metal or injection-molded plastics but from machined
Swerve Drive Selection Process. Cyber Blue 234 OCTOBER 2010 / Indiana Forums
 Swerve Drive Selection Process Cyber Blue 234 OCTOBER 2010 / Indiana Forums Background Cyber Blue had discussed wanting to try an omni-directional drive system for many years Recognized need for a lot
Swerve Drive Selection Process Cyber Blue 234 OCTOBER 2010 / Indiana Forums Background Cyber Blue had discussed wanting to try an omni-directional drive system for many years Recognized need for a lot
Different types of gears. Spur gears. Idler gears. Worm gears. Bevel gears. Belts & Pulleys
 GEARS Robot Gears By using different gear diameters, you can exchange between rotational (or translation) velocity and torque. by looking at the motor datasheet you can determine the output velocity and
GEARS Robot Gears By using different gear diameters, you can exchange between rotational (or translation) velocity and torque. by looking at the motor datasheet you can determine the output velocity and
Chapter 7: DC Motors and Transmissions. 7.1: Basic Definitions and Concepts
 Chapter 7: DC Motors and Transmissions Electric motors are one of the most common types of actuators found in robotics. Using them effectively will allow your robot to take action based on the direction
Chapter 7: DC Motors and Transmissions Electric motors are one of the most common types of actuators found in robotics. Using them effectively will allow your robot to take action based on the direction
Math is Not a Four Letter Word FTC Kick-Off. Andy Driesman FTC4318 Green Machine Reloaded
 1 Math is Not a Four Letter Word 2017 FTC Kick-Off Andy Driesman FTC4318 Green Machine Reloaded andrew.driesman@gmail.com 2 Goals Discuss concept of trade space/studies Demonstrate the importance of using
1 Math is Not a Four Letter Word 2017 FTC Kick-Off Andy Driesman FTC4318 Green Machine Reloaded andrew.driesman@gmail.com 2 Goals Discuss concept of trade space/studies Demonstrate the importance of using
How To Build A Mini Chopper!
 How To Build A Mini Chopper! by Custom-Choppers-Guide.com Copyright All Rights Reserved. If you are new to such projects, it is strongly recommended that you do an assembly job, purchasing pre-constructed
How To Build A Mini Chopper! by Custom-Choppers-Guide.com Copyright All Rights Reserved. If you are new to such projects, it is strongly recommended that you do an assembly job, purchasing pre-constructed
2018 KANSAS BEST BREAKOUT SESSIONS
 2018 KANSAS BEST BREAKOUT SESSIONS Tips for Building a Robot Bryan Jaax September 8, 2018 1 ST STEP: READ the RULES and Technical Data Package 2 FOLLOW AN ENGINEERING PROCESS Define the Problem Brainstorm:
2018 KANSAS BEST BREAKOUT SESSIONS Tips for Building a Robot Bryan Jaax September 8, 2018 1 ST STEP: READ the RULES and Technical Data Package 2 FOLLOW AN ENGINEERING PROCESS Define the Problem Brainstorm:
RAMPAGE POWER LIFT RAMP
 RAMPAGE POWER LIFT RAMP INSTALLATION AND OPERATING INSTRUCTIONS (3/10/07) The Rampage Power Lift Ramp is the fast, easy, and safe way to load a motorcycle into a truck. One person can load or unload a
RAMPAGE POWER LIFT RAMP INSTALLATION AND OPERATING INSTRUCTIONS (3/10/07) The Rampage Power Lift Ramp is the fast, easy, and safe way to load a motorcycle into a truck. One person can load or unload a
Other actuators. Kon Mechatronic Sensors and Actuators Tapio Lantela,
 Other actuators Kon-41.3140 Mechatronic Sensors and Actuators Tapio Lantela, Overview of lecture Pneumatics Linear motion with electromagnetic devices - Conversion from rotary motion - Solenoid - Voice
Other actuators Kon-41.3140 Mechatronic Sensors and Actuators Tapio Lantela, Overview of lecture Pneumatics Linear motion with electromagnetic devices - Conversion from rotary motion - Solenoid - Voice
Good Winding Starts the First 5 Seconds Part 2 Drives Clarence Klassen, P.Eng.
 Good Winding Starts the First 5 Seconds Part 2 Drives Clarence Klassen, P.Eng. Abstract: This is the second part of the "Good Winding Starts" presentation. Here we discuss the drive system and its requirements
Good Winding Starts the First 5 Seconds Part 2 Drives Clarence Klassen, P.Eng. Abstract: This is the second part of the "Good Winding Starts" presentation. Here we discuss the drive system and its requirements
Unit 1 Introduction to VEX and Robotics
 Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and
Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and
Transmission systems: Multiple components that have the same type of movement (rotational, linear, etc)
") Transmission systems: Multiple components that have the same type of movement (rotational, linear, etc) Transformation systems: Different components in the system have different types of movement Ex: rotational
Transmission systems: Multiple components that have the same type of movement (rotational, linear, etc) Transformation systems: Different components in the system have different types of movement Ex: rotational
Selecting the Optimum Motion Control Solution for the Application By Festo Corporation
 Selecting the Optimum Motion Control Solution for the Application By Festo Corporation The successful machine builder develops products that offer superior price, performance, reliability, and the ability
Selecting the Optimum Motion Control Solution for the Application By Festo Corporation The successful machine builder develops products that offer superior price, performance, reliability, and the ability
Battery Buggy. Division B
 Battery Buggy Division B http://api-static.ctlglobalsolutions.com/science/so_b_2018final.pdf Objective: To build a battery powered vehicle travels a specific distance as quickly as possible and stop as
Battery Buggy Division B http://api-static.ctlglobalsolutions.com/science/so_b_2018final.pdf Objective: To build a battery powered vehicle travels a specific distance as quickly as possible and stop as
Demystifying the Use of Frameless Motors in Robotics
 WHITEPAPER Demystifying the Use of Frameless Motors in Robotics TABLE OF CONTENTS EXECUTIVE SUMMARY: THE VALUE OF FRAMELESS MOTORS IN ROBOTICS ENGINEERS: WHY IS THIS ARTICLE FOR YOU? ADVANTAGES OF FRAMELESS
WHITEPAPER Demystifying the Use of Frameless Motors in Robotics TABLE OF CONTENTS EXECUTIVE SUMMARY: THE VALUE OF FRAMELESS MOTORS IN ROBOTICS ENGINEERS: WHY IS THIS ARTICLE FOR YOU? ADVANTAGES OF FRAMELESS
Lockpicking Tools: User Guide
 Lockpicking Tools: User Guide Tips & Tricks for using Lockpicking Tools Contents Introduction..3 Padlock Shims..5 Comb Picks....7 Jiggler Keys...9 The Lock Gun..11 Bypass Sheets....13 Bump Keys...14 Other
Lockpicking Tools: User Guide Tips & Tricks for using Lockpicking Tools Contents Introduction..3 Padlock Shims..5 Comb Picks....7 Jiggler Keys...9 The Lock Gun..11 Bypass Sheets....13 Bump Keys...14 Other
BOBSLED RACERS. DESIGN CHALLENGE Build a miniature bobsled that can win a race down a slope.
 Grades 3 5, 6 8 30 minutes BOBSLED RACERS DESIGN CHALLENGE Build a miniature bobsled that can win a race down a slope. MATERIALS Supplies and Equipment: Stopwatch Flat-bottomed 10-foot vinyl gutters (1
Grades 3 5, 6 8 30 minutes BOBSLED RACERS DESIGN CHALLENGE Build a miniature bobsled that can win a race down a slope. MATERIALS Supplies and Equipment: Stopwatch Flat-bottomed 10-foot vinyl gutters (1
All levers are one of three types, usually called classes. The class of a lever depends on the relative position of the load, effort and fulcrum:
 Página 66 de 232 Mechanisms A mechanism is simply a device which takes an input motion and force, and outputs a different motion and force. The point of a mechanism is to make the job easier to do. The
Página 66 de 232 Mechanisms A mechanism is simply a device which takes an input motion and force, and outputs a different motion and force. The point of a mechanism is to make the job easier to do. The
Mechanical Systems. Section 1.0 Machines are tools that help humans do work. 1.1 Simple Machines- Meeting Human Needs Water Systems
 Unit 4 Mechanical Systems Section 1.0 Machines are tools that help humans do work. Define: machine- 1.1 Simple Machines- Meeting Human Needs Water Systems Then: Now: The earliest devices were devices.
Unit 4 Mechanical Systems Section 1.0 Machines are tools that help humans do work. Define: machine- 1.1 Simple Machines- Meeting Human Needs Water Systems Then: Now: The earliest devices were devices.
Wheeled Mobile Robots
 Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
SCRAP COLLECTING VEHICLE
 SCRAP COLLECTING VEHICLE Sunil Rathava 1, Gaurang Raval 2, Akshay Solanki 3, Shambhu Rai 4 1 Student, mechanical, V.I.E.R., Gujarat, INDIA 2 Student, mechanical, V.I.E.R., Gujarat, INDIA 3 Student, mechanical,
SCRAP COLLECTING VEHICLE Sunil Rathava 1, Gaurang Raval 2, Akshay Solanki 3, Shambhu Rai 4 1 Student, mechanical, V.I.E.R., Gujarat, INDIA 2 Student, mechanical, V.I.E.R., Gujarat, INDIA 3 Student, mechanical,
Some practical considerations
 ME 222: Kinematics of Machines and Mechanisms [L9] Practical Considerations Suril V. Shah IIT Jodhpur 1 Some practical considerations Pin Joints versus Sliders and Half Joints Cantilever or Straddle Mount?
ME 222: Kinematics of Machines and Mechanisms [L9] Practical Considerations Suril V. Shah IIT Jodhpur 1 Some practical considerations Pin Joints versus Sliders and Half Joints Cantilever or Straddle Mount?
Mechanics and Mechanisms. What is do you think about when you hear the word mechanics? Mechanics. Is this a mechanism? 2/17/2011
 Mechanics and Mechanisms What is do you think about when you hear the word mechanics? Mechanics Mechanics is the study of how things move Is this a mechanism? Concerned with creating useful movement through
Mechanics and Mechanisms What is do you think about when you hear the word mechanics? Mechanics Mechanics is the study of how things move Is this a mechanism? Concerned with creating useful movement through
Contents. Section 5: Adjustments Ball Detect Adjustment Transport Band Tension Adjustment
 Contents Section 5: Adjustments... 5-3 1. Ball Detect Adjustment... 5-3 2. Transport Band Tension Adjustment... 5-5 3. Transport Band Drive Belt Tension Adjustment... 5-7 4. Ball Cushion Adjustment...
Contents Section 5: Adjustments... 5-3 1. Ball Detect Adjustment... 5-3 2. Transport Band Tension Adjustment... 5-5 3. Transport Band Drive Belt Tension Adjustment... 5-7 4. Ball Cushion Adjustment...
ME6601 DESIGN OF TRANSMISSION SYSTEMS
 SYED AMMAL ENGINEERING COLLEGE (Approved by the AICTE, New Delhi, Govt. of Tamilnadu and Affiliated to Anna University, Chennai) Established in 1998 - An ISO 9001:2008 Certified Institution Dr. E.M.Abdullah
SYED AMMAL ENGINEERING COLLEGE (Approved by the AICTE, New Delhi, Govt. of Tamilnadu and Affiliated to Anna University, Chennai) Established in 1998 - An ISO 9001:2008 Certified Institution Dr. E.M.Abdullah
Roehrig Engineering, Inc.
 Roehrig Engineering, Inc. Home Contact Us Roehrig News New Products Products Software Downloads Technical Info Forums What Is a Shock Dynamometer? by Paul Haney, Sept. 9, 2004 Racers are beginning to realize
Roehrig Engineering, Inc. Home Contact Us Roehrig News New Products Products Software Downloads Technical Info Forums What Is a Shock Dynamometer? by Paul Haney, Sept. 9, 2004 Racers are beginning to realize
Manufacturing Lab Project
 Manufacturing Lab Project Automated Yoyo Assembly Manual ENGR 480 Spring 2014 Brendan Kennedy Justin Mouser Mark Meelhuysen Jayden Heck Contents Introduction... 3 Loading Machine... 4 Starting Machine...
Manufacturing Lab Project Automated Yoyo Assembly Manual ENGR 480 Spring 2014 Brendan Kennedy Justin Mouser Mark Meelhuysen Jayden Heck Contents Introduction... 3 Loading Machine... 4 Starting Machine...
Smart Spinner. Age 7+ Teacher s Notes. In collaboration with NASA
 Smart Spinner Age 7+ Teacher s Notes In collaboration with NASA LEGO and the LEGO logo are trademarks of the/sont des marques de commerce de/son marcas registradas de LEGO Group. 2012 The LEGO Group. 190912
Smart Spinner Age 7+ Teacher s Notes In collaboration with NASA LEGO and the LEGO logo are trademarks of the/sont des marques de commerce de/son marcas registradas de LEGO Group. 2012 The LEGO Group. 190912
SHOCK DYNAMOMETER: WHERE THE GRAPHS COME FROM
 SHOCK DYNAMOMETER: WHERE THE GRAPHS COME FROM Dampers are the hot race car component of the 90s. The two racing topics that were hot in the 80s, suspension geometry and data acquisition, have been absorbed
SHOCK DYNAMOMETER: WHERE THE GRAPHS COME FROM Dampers are the hot race car component of the 90s. The two racing topics that were hot in the 80s, suspension geometry and data acquisition, have been absorbed
Solutions for Intralogistics
 Solutions for Intralogistics APPLICATIONS 2 4 5 2 3 1 3 WE HAVE THE RIGHT SOLUTIONS FOR ALL YOUR INTRALOGISTICS NEEDS 6 7 1 CARTON PACKER 5 WAREHOUSE TRUCK 2 BELT CONVEYOR 6 WRAPPING 3 PALLETIZING 7 COUNTERBALANCE
Solutions for Intralogistics APPLICATIONS 2 4 5 2 3 1 3 WE HAVE THE RIGHT SOLUTIONS FOR ALL YOUR INTRALOGISTICS NEEDS 6 7 1 CARTON PACKER 5 WAREHOUSE TRUCK 2 BELT CONVEYOR 6 WRAPPING 3 PALLETIZING 7 COUNTERBALANCE
SERIES B & C ROLLER DOORS INSTALLATION GUIDE
 SERIES B & C ROLLER DOORS INSTALLATION GUIDE THESE INSTRUCTIONS ARE PROVIDED FOR USE BY EXPERIENCED INSTALLERS OF GARAGE DOORS BY UNDERTAKING THE INSTALLATION OF THIS DOOR, THE INSTALLER UNDERSTANDS THE
SERIES B & C ROLLER DOORS INSTALLATION GUIDE THESE INSTRUCTIONS ARE PROVIDED FOR USE BY EXPERIENCED INSTALLERS OF GARAGE DOORS BY UNDERTAKING THE INSTALLATION OF THIS DOOR, THE INSTALLER UNDERSTANDS THE
AIR BRAKES THIS SECTION IS FOR DRIVERS WHO DRIVE VEHICLES WITH AIR BRAKES
 Section 5 AIR BRAKES THIS SECTION IS FOR DRIVERS WHO DRIVE VEHICLES WITH AIR BRAKES AIR BRAKES/Section 5 SECTION 5: AIR BRAKES THIS SECTION COVERS Air Brake System Parts Dual Air Brake Systems Inspecting
Section 5 AIR BRAKES THIS SECTION IS FOR DRIVERS WHO DRIVE VEHICLES WITH AIR BRAKES AIR BRAKES/Section 5 SECTION 5: AIR BRAKES THIS SECTION COVERS Air Brake System Parts Dual Air Brake Systems Inspecting
2011 WINCH PRODUCT GUIDE WARN SELF-RECOVERY WINCHES FOR TRUCKS, JEEPS AND SUVS
 2011 WINCH PRODUCT GUIDE WARN SELF-RECOVERY WINCHES FOR TRUCKS, JEEPS AND SUVS Ultimate Performance Series For the serious off-roader. 9.0Rc... Page 13 9.5cti... Page 14 9.5xp... Page 15 Endurance 12.0...
2011 WINCH PRODUCT GUIDE WARN SELF-RECOVERY WINCHES FOR TRUCKS, JEEPS AND SUVS Ultimate Performance Series For the serious off-roader. 9.0Rc... Page 13 9.5cti... Page 14 9.5xp... Page 15 Endurance 12.0...
Week 4: Skipping & Lift Assists
 Week 4: Skipping & Lift Assists Build a lift that can raise and hold 4lbs of sacks 12 off the ground Learn build techniques for lifts Learn gear ratios Learn how to program more than the joystick Topic
Week 4: Skipping & Lift Assists Build a lift that can raise and hold 4lbs of sacks 12 off the ground Learn build techniques for lifts Learn gear ratios Learn how to program more than the joystick Topic
An Actual Driving Lesson. Learning to drive a manual car
 An Actual Driving Lesson Learning to drive a manual car Where are the controls that I might have to use in my driving: Knowing where the controls are, and being able to locate and use them without looking
An Actual Driving Lesson Learning to drive a manual car Where are the controls that I might have to use in my driving: Knowing where the controls are, and being able to locate and use them without looking
UNIT -I. Ans: They are specified by the no. of strands & the no. of wires in each strand.
 VETRI VINAYAHA COLLEGE OF ENGINEERING AND TECHNOLOGY, THOTTIAM, NAMAKKAL-621215. DEPARTMENT OF MECHANICAL ENGINEERING SIXTH SEMESTER / III YEAR ME6601 DESIGN OF TRANSMISSION SYSTEM (Regulation-2013) UNIT
VETRI VINAYAHA COLLEGE OF ENGINEERING AND TECHNOLOGY, THOTTIAM, NAMAKKAL-621215. DEPARTMENT OF MECHANICAL ENGINEERING SIXTH SEMESTER / III YEAR ME6601 DESIGN OF TRANSMISSION SYSTEM (Regulation-2013) UNIT
BASIC BUILDING TIPS. Building Tips TABLE OF CONTENTS. Forward 3 plates, beams, Connectors, 5 Bracing and Interlocking 6
 BASIC BUILDING TIPS last updated: June 25 th, 2015 TABLE OF CONTENTS Forward 3 plates, beams, Connectors, 5 Bracing and Interlocking 6 Basics on Gears 8 Types of gears 8 Gears Spacing 9 Simple Gear Ratio
BASIC BUILDING TIPS last updated: June 25 th, 2015 TABLE OF CONTENTS Forward 3 plates, beams, Connectors, 5 Bracing and Interlocking 6 Basics on Gears 8 Types of gears 8 Gears Spacing 9 Simple Gear Ratio
MAIN PRICE LIST. - B 487 Perforated Strip 2 1/2" B 488 Perforated Strip 3 1/2" B 482 Perforated Strip 4 1/2" 9 1.
 PERFORATED STRIPS LENGTH HOLES GBP 1 Perforated Strip 12 1/2" 25 1.63 1 a Perforated Strip 9 1/2" 19 1.51 1 b Perforated Strip 7 1/2" 15 1.39 2 Perforated Strip 5 1/2" 11 0.90 2 a Perforated Strip 4 1/2"
PERFORATED STRIPS LENGTH HOLES GBP 1 Perforated Strip 12 1/2" 25 1.63 1 a Perforated Strip 9 1/2" 19 1.51 1 b Perforated Strip 7 1/2" 15 1.39 2 Perforated Strip 5 1/2" 11 0.90 2 a Perforated Strip 4 1/2"
Factors to consider when selecting a diverter valve
 Factors to consider when selecting a diverter valve Selecting a diverter valve for your pneumatic conveying system can be a tough job, especially when you consider how many diverter valves are on the market.
Factors to consider when selecting a diverter valve Selecting a diverter valve for your pneumatic conveying system can be a tough job, especially when you consider how many diverter valves are on the market.
Exercises with the maxon Selection Program
 Exercises with the maxon Selection Program http://www.maxonmotor.com/maxon/view/msp Purposes and Goals The participants - learn how to use the main parts of the maxon selection program. - select motor-gearhead
Exercises with the maxon Selection Program http://www.maxonmotor.com/maxon/view/msp Purposes and Goals The participants - learn how to use the main parts of the maxon selection program. - select motor-gearhead
SuperQuest Salem Drive Train Best Practices
 SuperQuest Salem Drive Train Best Practices Drive Trains Design Hints Compare different designs Look at examples from Worlds Tips for Drive Systems Always support drive shafts on two points (gears, sprockets,
SuperQuest Salem Drive Train Best Practices Drive Trains Design Hints Compare different designs Look at examples from Worlds Tips for Drive Systems Always support drive shafts on two points (gears, sprockets,
632 Western Avenue Henniker, New Hampshire Tel. (603) Fax (603) POSITION OF THE ROLLER PLATES
 Fax (603) POSITION OF THE ROLLER PLATES") POSITION OF THE ROLLER PLATES The roller plate must be positioned as shown. The measurement to both of the roller plates is taken from the face of the kingpin shaft to the inside edge of the roller wheel
POSITION OF THE ROLLER PLATES The roller plate must be positioned as shown. The measurement to both of the roller plates is taken from the face of the kingpin shaft to the inside edge of the roller wheel
Introduction: Problem statement
 Introduction: Problem statement The goal of this project is to develop a catapult system that can be used to throw a squash ball the farthest distance and to be able to have some degree of accuracy with
Introduction: Problem statement The goal of this project is to develop a catapult system that can be used to throw a squash ball the farthest distance and to be able to have some degree of accuracy with
2.007 Design and Manufacturing I, Spring 2013 EXAM #2
 1 of 7 2.007 Design and Manufacturing I, Spring 2013 EXAM #2 NAME: Date: Tuesday 30 April, 11AM Please answer the following 9 questions showing your work to the extent possible within the allotted time.
1 of 7 2.007 Design and Manufacturing I, Spring 2013 EXAM #2 NAME: Date: Tuesday 30 April, 11AM Please answer the following 9 questions showing your work to the extent possible within the allotted time.
Engineering Design Process for BEST Robotics JANNE ACKERMAN COLLIN COUNTY (COCO) BEST & BEST OF TEXAS ROBOTICS
 BEST & BEST OF TEXAS ROBOTICS") Engineering Design Process for BEST Robotics JANNE ACKERMAN COLLIN COUNTY (COCO) BEST & BEST OF TEXAS ROBOTICS Agenda Getting Started Lessons Learned Design Process Engineering Mechanics 2 Save Time Complete
Engineering Design Process for BEST Robotics JANNE ACKERMAN COLLIN COUNTY (COCO) BEST & BEST OF TEXAS ROBOTICS Agenda Getting Started Lessons Learned Design Process Engineering Mechanics 2 Save Time Complete
IMPORTANT! DO NOT THROW AWAY THE SHIPPING CARTON AND PACKING MATERIAL
 Operator s Manual IMPORTANT! DO NOT THROW AWAY THE SHIPPING CARTON AND PACKING MATERIAL ii Table of Contents Operator Safety... 1 Introduction... 2 Unpacking and Setup... 3 Unpacking... 3 Setup... 4 ROCKET
Operator s Manual IMPORTANT! DO NOT THROW AWAY THE SHIPPING CARTON AND PACKING MATERIAL ii Table of Contents Operator Safety... 1 Introduction... 2 Unpacking and Setup... 3 Unpacking... 3 Setup... 4 ROCKET
Contents. Section 2: Electrical - Switches, Solenoids and Motors
 Contents Section 2: Electrical - Switches, Solenoids and Motors... 2-3 Switches...2-3 Switches A, B, C and D...2-4 Error Code A Switch...2-4 Error Code B Switch...2-5 Error Code C Switch...2-5 Error Code
Contents Section 2: Electrical - Switches, Solenoids and Motors... 2-3 Switches...2-3 Switches A, B, C and D...2-4 Error Code A Switch...2-4 Error Code B Switch...2-5 Error Code C Switch...2-5 Error Code
Chain Box and Knife. Item # Description Part Number 180-D & GS
 Chain Box and Knife Item # Description Part Number 180-D & GS 1 Groove pin 2275-03160 2 Hex cap screw 2175-03061 3 Washer 2275-03060 4 Setscrew 2175-07163 5 Chain box 4975-00355 6 Berkel logo 3175-00152
Chain Box and Knife Item # Description Part Number 180-D & GS 1 Groove pin 2275-03160 2 Hex cap screw 2175-03061 3 Washer 2275-03060 4 Setscrew 2175-07163 5 Chain box 4975-00355 6 Berkel logo 3175-00152
Mechanisms and Structures. Mechanical Systems. Levers. Basic Forces
 Mechanisms and Structures Mechanical Systems Levers Basic Forces Pupil Name Teacher Class Page 1 MECHANICAL SYSTEMS Our every day lives are made much easier by a variety of mechanical systems that help
Mechanisms and Structures Mechanical Systems Levers Basic Forces Pupil Name Teacher Class Page 1 MECHANICAL SYSTEMS Our every day lives are made much easier by a variety of mechanical systems that help
LEGO Parts Guide. Naming and Building with LEGO parts. Version 1.3 4/12/10
 LEGO Parts Guide Naming and Building with LEGO parts Version 1.3 4/12/10 Table of Contents Connectors... 4 Friction Pegs... 4 Frictionless Pegs... 5 Ball Joints / Tie Rods... 6 Bushings... 7 Angle Connectors...
LEGO Parts Guide Naming and Building with LEGO parts Version 1.3 4/12/10 Table of Contents Connectors... 4 Friction Pegs... 4 Frictionless Pegs... 5 Ball Joints / Tie Rods... 6 Bushings... 7 Angle Connectors...
R-SERIES MULTI-AXIS INDUSTRIAL ROBOTS
 Automation Solutions R-SERIES MULTI-AXIS INDUSTRIAL ROBOTS COMPACT MULTI-AXIS INDUSTRIAL ROBOTS FOR COMPLEX PROCESSING TASKS Reduce Manufacturing Costs Improve Production Time Increase Throughput Engineering
Automation Solutions R-SERIES MULTI-AXIS INDUSTRIAL ROBOTS COMPACT MULTI-AXIS INDUSTRIAL ROBOTS FOR COMPLEX PROCESSING TASKS Reduce Manufacturing Costs Improve Production Time Increase Throughput Engineering
MANUAL TRANSMISSION SERVICE
 MANUAL TRANSMISSION SERVICE Introduction Internal combustion engines develop very little torque or power at low rpm. This is especially obvious when you try to start out in direct drive, 4th gear in a
MANUAL TRANSMISSION SERVICE Introduction Internal combustion engines develop very little torque or power at low rpm. This is especially obvious when you try to start out in direct drive, 4th gear in a
Chapter 12. Formula EV3: a racing robot
 Chapter 12. Formula EV3: a racing robot Now that you ve learned how to program the EV3 to control motors and sensors, you can begin making more sophisticated robots, such as autonomous vehicles, robotic
Chapter 12. Formula EV3: a racing robot Now that you ve learned how to program the EV3 to control motors and sensors, you can begin making more sophisticated robots, such as autonomous vehicles, robotic
3-ROLL VARIABLE AXIS PLATE BENDING ROLLS PCO
 3-ROLL VARIABLE AXIS PLATE BENDING ROLLS PCO I 3-ROLL VARIABLE AXIS PLATE BENDING ROLLS PCO A passion for machines A family story made of passion and innovation. It was in 1927 when Ernesto Parmigiani
3-ROLL VARIABLE AXIS PLATE BENDING ROLLS PCO I 3-ROLL VARIABLE AXIS PLATE BENDING ROLLS PCO A passion for machines A family story made of passion and innovation. It was in 1927 when Ernesto Parmigiani
Solar Car Suspension Design Considerations for achieving an efficient and stable vehicle
 Innovators Educational Foundation Solar Car Suspension Design Considerations for achieving an efficient and stable vehicle Solar Car Conference, February 1-3, 2019 Southern Illinois University, Edwardsville,
Innovators Educational Foundation Solar Car Suspension Design Considerations for achieving an efficient and stable vehicle Solar Car Conference, February 1-3, 2019 Southern Illinois University, Edwardsville,
Linear Torque Limiting Clutch
 LM Series Features & Options Linear Torque Limiting Clutch Innovation Description & Operation Sankyo's LM Series offers adjustable torque limiting in any linear axis. It mounts directly to linear slide
LM Series Features & Options Linear Torque Limiting Clutch Innovation Description & Operation Sankyo's LM Series offers adjustable torque limiting in any linear axis. It mounts directly to linear slide
Module 5: Valves. CDX Diesel Hydraulics. Terms and Definitions. Categories of Valves. Types of Pressure Control Valves
 Terms and Definitions Categories of Valves Types of Pressure Control Valves Types and Operation of Pressure Relief Valves Operation of an Unloading Valve Operation of a Sequencing Valve Operation of a
Terms and Definitions Categories of Valves Types of Pressure Control Valves Types and Operation of Pressure Relief Valves Operation of an Unloading Valve Operation of a Sequencing Valve Operation of a
Mechanical Motion. Control Components. and Subsystems. Understanding How Components Effect System Performance
 Mechanical Motion Control Components and Subsystems Understanding How Components Effect System Performance Mechanical Motion Control Components and Subsystems Overview: Bearings Linear Bearing Technologies
Mechanical Motion Control Components and Subsystems Understanding How Components Effect System Performance Mechanical Motion Control Components and Subsystems Overview: Bearings Linear Bearing Technologies
INSTALLATION INSTRUCTIONS
 INSTALLATION INSTRUCTIONS BIG ROTOR / CALIPER RELOCATION REAR KIT SUM-BK1423 1999-2009 GM 1/2 Ton Trucks & SUVs Thank you for choosing SUMMIT RACING for your braking needs. Pleases take the time to read
INSTALLATION INSTRUCTIONS BIG ROTOR / CALIPER RELOCATION REAR KIT SUM-BK1423 1999-2009 GM 1/2 Ton Trucks & SUVs Thank you for choosing SUMMIT RACING for your braking needs. Pleases take the time to read