BASIC BUILDING TIPS. Building Tips TABLE OF CONTENTS. Forward 3 plates, beams, Connectors, 5 Bracing and Interlocking 6
|
|
|
- Cornelius Barker
- 5 years ago
- Views:
Transcription
1 BASIC BUILDING TIPS last updated: June 25 th, 2015 TABLE OF CONTENTS Forward 3 plates, beams, Connectors, 5 Bracing and Interlocking 6 Basics on Gears 8 Types of gears 8 Gears Spacing 9 Simple Gear Ratio 10 Compound gear ratio 11 Multi-stage Gear Transmission System 12 Using Gears to form movements on 2 different planes 13 The Idler Gear 14 Using Worm Gear 15 Rack pinion 18 Forces on Gears 18 Differential Gear 18 BackLash Issue 19 Reducing Backlash: 19 Efficiency 19 Pulley 20 Wheel Loading and Friction 21 Motor Bracing 22 Sensors 23 Touch Bumper 23 Rotation Sensor 24 Multiplexing light and touch sensors 24 Robot Drive 25 Design to help going straight: 25 Calculating Torque 27 Design Concepts by MIT Media Lab 28 Beams, Connectors, and Axles 29 Sample GearBox with Compound Gear Transmission 29 Efficiency 30 Drive Mechanisms 30 Gear Ratio Exercises 31 1 P a g e
2 Simple Gear Ratio 31 Compound Gears Ratio 32 Fun Gears Puzzle 34 2 P a g e
3 BASICS ON BUILDING SOUND STRUCTURE FORWARD This document will not provide a long list of building instructions for completing a robot. This document is about strengthening your understanding in mechanical functionalities using LEGO components. This documents purpose is to help you in the following areas: 1. Understand basic mechanical Interrelationships. 2. Visualize mechanical movements 3. Grasp Spatial interrelationships - visualize and manipulate objects (usually geometric figures) in space. 4. Help to apply when tackling various building challenge. Many online sites provide wealth of informative materials. However, most which are very useful are also a bit of over-whelming. They cover very rich and excellent information, but may require a more mature reading skills. Therefore, I extracted and summarized much of it and presented it in fashion which is more fun to review for Mindstorms elementary and middle school readers who may quickly get a conceptual idea. Since most of the images are from these sites, I feel it is important to list the links here instead of at the bottom of the document. This document is meant internal reference only. Proper credits will be cited for each individual diagrams in the future. : Most images are from: Sariel Custom LEGO Technic Creations (hightechkids.org) 3 P a g e
4 THINGS TO THINK ABOUT WHEN IT COMES TO CREATE A SOUND STRUCTURE Design: Slow vs. fast? Gear backlash Stability Skidding (Tank-tracks vs. wheels) What level of precision your gear system Drive train 2 or 4 wheel drive, with or without steering mechanism Possible Work division (work concurrently) Make testing as part of your design phase Modular design? Sensors mounting Structure and size Strive for cool solutions, that work! Consider the aesthetics later. Testing: Modularize your tests Test each module independently. Examine the Interaction of sub-systems Repeatability. Last but not least : Have fun VERY IMPORTANT: All contraptions shown in this document is meant to be just a modular prototype. The purpose is to give you important foundamental understanding mechanical functionalities. You must create your own secure structure onto your robot platform. 4 P a g e


5 PLATES, BEAMS, CONNECTORS, 5 P a g e
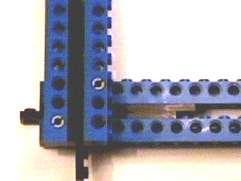
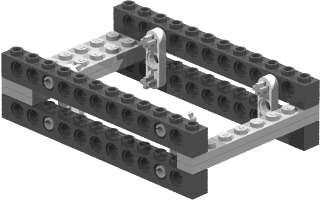

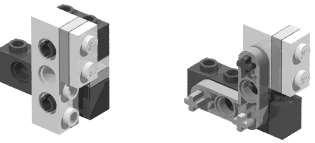
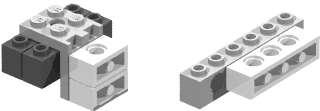
6 BRACING AND INTERLOCKING Notice that there are 2 plates in-between. Simple triangular bracing Interlocking it. Cross Braced Frame Turning 90 degrees studs out 6 P a g e


7 Turning 90 degrees studs in Upside down Extension Use Cross-axle connections This can can lock beams at fixed angle, and keep them from spinning. 7 P a g e


8 BASICS ON GEARS Importance in combining the gears is to transfer motion and gain mechanical advantage TYPES OF GEARS Rack pinion Ball Gear Spur For linear mounting, i.e. side by side. Crown Allow 90 degree mounting Worm Provide locking system Clutch Like Spur gear, but allow slippage as the axle hole is made of softer materials Bevel Provide features from both a spur and crown gear. There are various types of bevel gears. LEGO bevel gear transmit motion between shafts with intersecting center lines Ball Allow easy turning. But, not for precision. 8 P a g e






9 GEARS SPACING ODD GEAR SPACING Images from 9 P a g e





10 SIMPLE GEAR RATIO This applies to any type of gears. 8-th 16-th 24-th 40-th Drive Follower 8:16 or 1:2 8:24 or 1:3 40:8 or 5:1 Gear Ratio = 8: 1 (from 24 : 8) gear down to gain torque Driver = 8-th Follower=24-th Gear Ratio = 1 to 8 (from 8:24) gear up to gain speed Driver = 24-th Follower=8-th Gear ratio = 1 : 1 The 24-tooth gear in the middle does not affect the gear ratio. Thus, it is called idler gear. See more samples below 10 P a g e

 To reduce speed == increase torque Trading off between Speed and Strength (Torque) To")
11 COMPOUND GEAR RATIO Before you calculate gear ratio, identify the driver and follower pairs first. Gear ratio = 9 : 1 From 24/8 x 24/8 Driver Follower Trading off between Speed and Strength (Torque) To reduce speed == increase torque Trading off between Speed and Strength (Torque) To increase speed < > reduce torque Just make the 40-th gear to be the driver instead. 11 P a g e


12 MULTI-STAGE GEAR TRANSMISSION SYSTEM To achieve extreme gear ratio, you should create a multi-stage instead of a linear fashion, i.e. one next to each other. Doing one next to each other greatly reduce efficiency, far worse than multi-stage. Driver (input shaft) Output shaft Driver (input shaft) Output shaft 12 P a g e








13 Gear Ratio = 625 : 1 Gear Ratio = 1 : 625 USING GEARS TO FORM MOVEMENTS ON 2 DIFFERENT PLANES Changing rotational axis With simple gear box Securing the two gears. 13 P a g e




14 Movements on 3 planes Movements on 3 planes with gear box NOTE! You will need to create a gear box structure good enough to hold these 3 axis movement in place. This image is just simply a proto-type to get the concept across. THE IDLER GEAR Notice the middle one s role is to transmit the motion. It does not change the gear ratio between the input and output shaft. Also, watch the rotational direction! Idler gear Input shaft output shaft NOT idler gears 14 P a g e






15 USING WORM GEAR Using Worm gear as the locking mechanism. Worm has to be the driver, not follower. This is used as a good locking system, such as a Claw, joint like an elbow, crane, etc. Changing rotational axis There is a 24-tooth gear behind the triangular bracket. Gear Ratio 24 : 1 There is a 12-tooth gear behind the triangular bracket. Gear Ratio 12 : 1 Another way to mount the worm gear with a spur gear 15 P a g e
16 16 P a g e



17 The worm must be the driver gear! There are two 24-tooth gears.. So, the two output shaft (24-t) spins in the same rate.. Attention! Just like anything else, this is only a prototype. Since this is meant to lift heavy object, this structure requires strong bracing and secured on a platform Lead screw Good bad 17 P a g e




18 RACK PINION FORCES ON GEARS Images from DIFFERENTIAL GEAR Images from A differential is a device which applies torque evenly distributes it to two output shafts. Besides, it also allows each output to spin at a different speed. Attaching a rotation sensor to the differential housing would provide a MORE accurate measure of travel distance. 18 P a g e

19 BACKLASH ISSUE Usually not an issue unless your automated system requires a lot of accuracy. If you are in a competition like Robocupjunior, it is not so much an issue as you may use various sensors to increase accuracy to interact with an environment with a lot of variable elements. Unlike First Lego League, this game has a lot of pre-defined elements, ie. Location and dimensions of objects are all pre-defined. You are not allowed to use non-lego sensors, nor most even 3 rd party lego compatible sensors. Accuracy of movement is extremely important in order to achieve consistent result. Backlash Problem Images from One Way to minimize backlash Images from Caused by poor gears meshing! REDUCING BACKLASH: Gear down if possible. Avoid diagonal mounting, unless you can mount it in perfect distance. Bigger the gear,the less backlach effect Minimize the linear mounting of many gears in a row. The backlashes effect of meshed gears sum up. Go for Multi-stage. Create a gear-up system for the rotation center to increase accuracy Use Bevel gear. Do not use worm gear unless you have to. EFFICIENCY Efficiency of the gear == amount of power is transferred. As long as there are gears meshed together, it losses some efficiency due to the friction due to the weight, and backlash issues. Same guideline is used for this to minimize backlash. 19 P a g e
20 PULLEY This provides similar functions like gears, except pulleys allows much slippage, but very flexible on the distance between input and output shaft. Example: Rotate opposite direction Rotate same direction 20 P a g e


21 WHEEL LOADING AND FRICTION Images from Typical Cantilevered and Fully Supported Wheels Keys: 1. Placing the wheels close to the frame 2. Spreading out the axle supports to reduce the forces required to react the moment from the wheel. 21 P a g e


22 MOTOR BRACING The new mindstorms need to allow much more secured bracing. However, they are indeed much too much for some light weight work. If you use one of the RCX style motor, you must brace it very well. Images from 22 P a g e




23 SENSORS Images from TOUCH BUMPER Smart way to preform multiple functions Detect light reflection, rotation precision. Then, with the touch sensor, it can perform reset in order to remove accumulative errors. Very smart contraption. Images from Light Touch External rotation sensor Sensors here are from the older RCX set. They work just as good as the NXT or EV3 versions. These are sometimes more preferrable due to their small sizes. Besides, you can multiplex the touch and light sensor on the same port. With the NXT or EV3 ones, you cannot do that. 23 P a g e

24 ROTATION SENSOR A Bumper contraption mounted with a rotation sensor, you can tell exactly how far the obstacle is in front of you. MULTIPLEXING LIGHT AND TOUCH SENSORS Open Touch closed Light sensor Touch 0 1 Light level Light reading Light level 100 Unknown, but that s ok as this design is meant to detect obstruction. 24 P a g e



25 ROBOT DRIVE To maintain balance, the CG must remain well inside the wheelbase. If it is outside the wheelbase, the robot will tip over. The closer the CG is to the center of the wheelbase, the more stable the robot becomes. DESIGN TO HELP GOING STRAIGHT: Using a slip limiter Locking differential Slip limiter : The longer the length of axle inside the hose the more torque is transmitted. This can help to transfer speed to the other wheel. Locking differential: to eliminate slip between the left and right drive wheels. It forces the two independent axles to behave like a solid axle. 25 P a g e


26 You may also use PID motor feedback control in your program to sync up the motors. However, no matter what, this cannot overcome uneven terrain. Thus, a type of orientation sensing device is needed if orientation is important to your robot. USING CASTER SUPPORT Pivotal caster wheel allows easy manuverability, but inaccurate turn. Caster ball will reduce the accuracy of turning. 26 P a g e

27 CALCULATING TORQUE Coming soon! Torque = rotational force = force x distance 27 P a g e
28 DESIGN CONCEPTS BY MIT MEDIA LAB Doesn t matter it is LEGO or other components. Basic mechanical principles apply to all components: Keep in mind these few universal engineering principles when building your robot. We ve seen, in every contest we ve run, that teams who do well all follow these (sometimes, to extremes!). Simplicity. The best way to build a reliable robot is to keep it as simple as possible. The more complicated a design is, the more prone it is to failure, and the harder it is to adapt when your ideas change. It is generally better to build a part that works in most cases all of the time rather than all cases most of the time. Strength. Investing time in sound robot construction will save you lots of time and suffering in the future. LEGO is a great medium for rapidly building a robust robot, but only if braced properly. Even when prototyping parts for your robot, build them for strength. Modularity. Often, it will be necessary to upgrade or repair a component of the robot, but if the robot is built as one monolithic unit this may make it necessary to disassemble a substantial portion of the structure. If, however, you design your robot as a group of connected modules, modules can simply be removed and rebuilt as needed. 28 P a g e

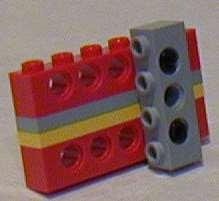
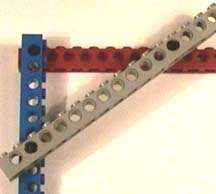
29 BEAMS, CONNECTORS, AND AXLES One of the most important types of parts in the LEGO Technic system is the beam. Beams are long structural pieces with holes through their sides. Besides their obvious use as structure components, they can be used in conjunction with other pieces to build elaborate structures. Connectors allow you to stack beams side-to-side by spanning the holes of adjacent beams. Bracing a side-toside joint across two holes will provide a stable beam structure, while using only one joint will allow you to create diagonal structures and moving joints. Imagine the possibilities! Note that the two types of connector are functionally different. The black ones fit more snugly into the holes and resist rotation. The gray ones, on the other hand, rotate freely inside the holes for use in moving parts. It is alright to use the gray connectors in place of the black ones, but using a black connector in a moving joint will damage the connector and hole. The holes through the beams also serve a further function when coupled with axles. The axles can be passed through a hole, and if supported properly between multiple beams, can rotate freely. SAMPLE GEARBOX WITH COMPOUND GEAR TRANSMISSION 29 P a g e
30 EFFICIENCY The biggest enemy of any gearbox is friction. Every place where something rubs, energy is lost which makes your robot slower and weaker. In the short-run, this causes your robot to perform poorly and seize up, but in the long-run, it will cause wear and tear on the moving parts. More damage means more friction, and after awhile, the gearbox will stop working. In order to minimize the amount of friction in your gearbox and maximize its efficiency, follow the tips below: 1. The spacing between gears is very important. If they are too close to each other, they will bind up. If they are too far, the teeth will slip past each other. Make sure that gears are spaced at exact LEGO dimensions and avoid meshing gears at an angle The axles are made out of plastic and can bend if not properly supported. Try to always support the axle between two beams and do not place a gear more than one space outside of the supports. 3. The gearbox will often be subjected to stresses when used within a robot. Make sure that the beams supporting the axles are attached to each other with more than one cross-support and that the whole structure is braced. If the beams are not perfectly parallel, the axles will rub against the insides of the holes During operation the gears can slide along the axle or bump into nearby gears. Use spacers to fill in any empty spots along the axle Make sure that the axles can slide back and forth a tiny bit. If they cannot, the gears or spacers are probably pushing up against a beam. This is probably the most common (and easiest to fix) mistake which saps efficiency from a gearbox. If you want to know how good your gearbox is, try backdriving it. Remove the motor and try to turn the output shaft (the slow axle) by hand. If your geartrain is efficient, you will be able to turn all the gears this way, and if it is really efficient, they should continue spinning for a second or two after you let go. If your gearbox cannot be backdriven, something may be wrong with it. DRIVE MECHANISMS Perhaps the single most important aspect of a robot s physical design is its drive system. It is responsible for moving the robot from place to place by providing the appropriate motive force and steering mechanisms. Figure 5 shows the three most popular drive arrangements. 30 P a g e

31 GEAR RATIO EXERCISES SIMPLE GEAR RATIO Gears go together in groups of two or more. One gear turns another, which may turn another, and so on... To begin our investigation of gears, let's first decide how many different possible combinations of two gears there are. Obtain each one of the following: 40-tooth Gear 24-tooth Gear 16-tooth Gear 8-tooth Gear A beam longer than 10-stud (with holes) four #8 axles. Key focus: 6. Find out different pairs of gears (two gears together) you can make using these 4 sizes. 7. How many holes to leave between gears so that they will mesh together. 8. Draw the different gear combinations in the following pages. Note: Don't forget to include pairs where the gears are the same size! Put a cross in the hole to represent axle. Draw circles to represent the gears. Write down gears ratio next to it. Example: 31 P a g e


32 COMPOUND GEARS RATIO 1. What are the compound gear ratios of these gearboxes? The input axle is on the left, and the output axle is on the right. 16 tooth 2. Explain, in your own words, what a force is. 16 tooth 3. What are the two components of work? 4. You have a gearbox that is closed, you can t see the gears. However, you know if you turn the input axle with a torque of 2 Newton-meters, you measure a torque on the output axle of 100 Newton-meters. What is the gear ratio? (Assume negligible friction). Is the output axle turning faster or slower than the input axle? 5. BONUS FOR CAR DRIVERS. If you have a car with a manual transmission, you know you have to put the car into 1st gear, then change to 2nd, then to 3rd, etc. Why do you think you have to do this? 32 P a g e

 b) Tire measures 14cm diameter. 33 P a g e When Motor turns 180 degree, it travels cm.")
33 6. Given the following information: a) b) Tire measures 14cm diameter. Calculate the distance traveled when: When Motor turns 360 degree, it travels cm. When Motor turns 180 degree, it travels cm. When Motor turns 45 degree, it travels cm. 7. Given the following information: a) b) Tire measures 14cm diameter. 33 P a g e Calculate the distance traveled when: When Motor turns 360 degree, it travels cm. When Motor turns 180 degree, it travels cm. When Motor turns 45 degree, it travels cm.

34 FUN GEARS PUZZLE 34 P a g e
How to Build with the Mindstorm Kit
 How to Build with the Mindstorm Kit There are many resources available Constructopedias Example Robots YouTube Etc. The best way to learn, is to do Remember rule #1: don't be afraid to fail New Rule: don't
How to Build with the Mindstorm Kit There are many resources available Constructopedias Example Robots YouTube Etc. The best way to learn, is to do Remember rule #1: don't be afraid to fail New Rule: don't
Deriving Consistency from LEGOs
 Deriving Consistency from LEGOs What we have learned in 6 years of FLL by Austin and Travis Schuh Objectives Basic Building Techniques How to Build Arms and Drive Trains Using Sensors How to Choose a Programming
Deriving Consistency from LEGOs What we have learned in 6 years of FLL by Austin and Travis Schuh Objectives Basic Building Techniques How to Build Arms and Drive Trains Using Sensors How to Choose a Programming
ROBOTICS BUILDING BLOCKS
 ROBOTICS BUILDING BLOCKS 2 CURRICULUM MAP Page Title...Section Estimated Time (minutes) Robotics Building Blocks 0 2 Imaginations Coming Alive 5...Robots - Changing the World 5...Amazing Feat 5...Activity
ROBOTICS BUILDING BLOCKS 2 CURRICULUM MAP Page Title...Section Estimated Time (minutes) Robotics Building Blocks 0 2 Imaginations Coming Alive 5...Robots - Changing the World 5...Amazing Feat 5...Activity
Smart Spinner. Age 7+ Teacher s Notes. In collaboration with NASA
 Smart Spinner Age 7+ Teacher s Notes In collaboration with NASA LEGO and the LEGO logo are trademarks of the/sont des marques de commerce de/son marcas registradas de LEGO Group. 2012 The LEGO Group. 190912
Smart Spinner Age 7+ Teacher s Notes In collaboration with NASA LEGO and the LEGO logo are trademarks of the/sont des marques de commerce de/son marcas registradas de LEGO Group. 2012 The LEGO Group. 190912
Moments. It doesn t fall because of the presence of a counter balance weight on the right-hand side. The boom is therefore balanced.
 Moments The crane in the image below looks unstable, as though it should topple over. There appears to be too much of the boom on the left-hand side of the tower. It doesn t fall because of the presence
Moments The crane in the image below looks unstable, as though it should topple over. There appears to be too much of the boom on the left-hand side of the tower. It doesn t fall because of the presence
All levers are one of three types, usually called classes. The class of a lever depends on the relative position of the load, effort and fulcrum:
 Página 66 de 232 Mechanisms A mechanism is simply a device which takes an input motion and force, and outputs a different motion and force. The point of a mechanism is to make the job easier to do. The
Página 66 de 232 Mechanisms A mechanism is simply a device which takes an input motion and force, and outputs a different motion and force. The point of a mechanism is to make the job easier to do. The
What Are Gears? What Do They Do?
 What Are Gears? What Do They Do? Pre-Lesson Quiz 1. What is a gear? 2. List as many examples as you can of gears or objects that use gears. 2 Pre-Lesson Quiz Answers 1. What is a gear? A gear is a wheel
What Are Gears? What Do They Do? Pre-Lesson Quiz 1. What is a gear? 2. List as many examples as you can of gears or objects that use gears. 2 Pre-Lesson Quiz Answers 1. What is a gear? A gear is a wheel
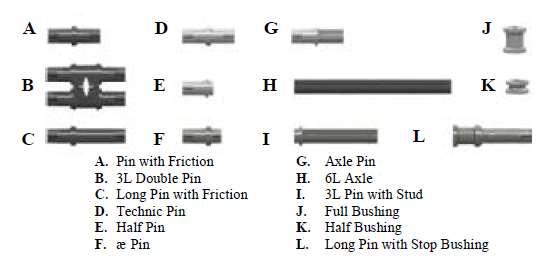
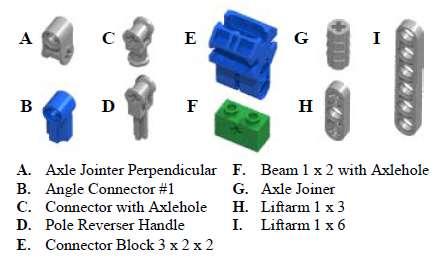
LEGO Parts Guide. Naming and Building with LEGO parts. Version 1.3 4/12/10
 LEGO Parts Guide Naming and Building with LEGO parts Version 1.3 4/12/10 Table of Contents Connectors... 4 Friction Pegs... 4 Frictionless Pegs... 5 Ball Joints / Tie Rods... 6 Bushings... 7 Angle Connectors...
LEGO Parts Guide Naming and Building with LEGO parts Version 1.3 4/12/10 Table of Contents Connectors... 4 Friction Pegs... 4 Frictionless Pegs... 5 Ball Joints / Tie Rods... 6 Bushings... 7 Angle Connectors...
Introduction. Kinematics and Dynamics of Machines. Involute profile. 7. Gears
 Introduction The kinematic function of gears is to transfer rotational motion from one shaft to another Kinematics and Dynamics of Machines 7. Gears Since these shafts may be parallel, perpendicular, or
Introduction The kinematic function of gears is to transfer rotational motion from one shaft to another Kinematics and Dynamics of Machines 7. Gears Since these shafts may be parallel, perpendicular, or
Chapter 1. Stair-Climber. Doug Carlson
 Chapter 1 Stair-Climber Doug Carlson 1 2 Chapter # Chapter Title Bill of Materials These are the parts you will need to build the Stair-Climber as shown. Introduction Stair-Climber is the latest in a series
Chapter 1 Stair-Climber Doug Carlson 1 2 Chapter # Chapter Title Bill of Materials These are the parts you will need to build the Stair-Climber as shown. Introduction Stair-Climber is the latest in a series
Manipulators. Basic/Background Info Types of Manipulators General Manipulator design tips
 FTC Manipulators By: Zach Zakfeld (Enigma Robotics) Teams: FTC 5391, FTC 5385 and FRC 2075 *Some images in this presentation are of FRC robots so exact designs may not be applicable, however all of the
FTC Manipulators By: Zach Zakfeld (Enigma Robotics) Teams: FTC 5391, FTC 5385 and FRC 2075 *Some images in this presentation are of FRC robots so exact designs may not be applicable, however all of the
LEGO Education WeDo 2.0 Toolbox
 LEGO Education WeDo 2.0 Toolbox WeDo 2.0 Table of Contents Program with WeDo 2.0 3-21 Build with WeDo 2.0 22-36 Program with WeDo 2.0 Programming is an important part of twenty-first century learning,
LEGO Education WeDo 2.0 Toolbox WeDo 2.0 Table of Contents Program with WeDo 2.0 3-21 Build with WeDo 2.0 22-36 Program with WeDo 2.0 Programming is an important part of twenty-first century learning,
Wheeled Mobile Robots
 Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
CONTENTS PROJECT IDEAS 4 ROBO 1 6 ROBO 2 9 PATHFINDER 1 13 PATHFINDER 2 15 ACROBOT 1 17 ACROBOT 2 20 SPECIAL FEATURES. Movement 26.
 The Constructopedia is a building guide for the Robotics Invention System that offers suggestions, hints, and tips to get you started on the CD-ROM Challenges and robotic inventions of your own design.
The Constructopedia is a building guide for the Robotics Invention System that offers suggestions, hints, and tips to get you started on the CD-ROM Challenges and robotic inventions of your own design.
Mechanical Power Transmission. September 16, 2008
 2008 TE Sessions Supported by Mechanical Power Transmission September 16, 2008 www.robojackets.org Goals Hand out kits to teams that don t have one. More physics concepts and terms Understanding key devices
2008 TE Sessions Supported by Mechanical Power Transmission September 16, 2008 www.robojackets.org Goals Hand out kits to teams that don t have one. More physics concepts and terms Understanding key devices
Grade 8 Science. Unit 4: Systems in Action
 Grade 8 Science Unit 4: Systems in Action Machines That Turn Last class we looked at the idea of a boat winch, a wheel and axle used to get a boat out of the water, onto a trailer. You rotate the handle
Grade 8 Science Unit 4: Systems in Action Machines That Turn Last class we looked at the idea of a boat winch, a wheel and axle used to get a boat out of the water, onto a trailer. You rotate the handle
MECHANISMS. AUTHORS: Santiago Camblor y Pablo Rivas INDEX
 MECHANISMS AUTHORS: Santiago Camblor y Pablo Rivas INDEX 1 INTRODUCTION 2 LEVER 3 PULLEYS 4 BELT AND PULLEY SYSTEM 5 GEARS 6 GEARS WITH CHAIN 7 WORM GEAR 8 RACK AND PINION 9 SCREW AND NUT 10 CAM 11 ECCENTRIC
MECHANISMS AUTHORS: Santiago Camblor y Pablo Rivas INDEX 1 INTRODUCTION 2 LEVER 3 PULLEYS 4 BELT AND PULLEY SYSTEM 5 GEARS 6 GEARS WITH CHAIN 7 WORM GEAR 8 RACK AND PINION 9 SCREW AND NUT 10 CAM 11 ECCENTRIC
Chapter 12. Formula EV3: a racing robot
 Chapter 12. Formula EV3: a racing robot Now that you ve learned how to program the EV3 to control motors and sensors, you can begin making more sophisticated robots, such as autonomous vehicles, robotic
Chapter 12. Formula EV3: a racing robot Now that you ve learned how to program the EV3 to control motors and sensors, you can begin making more sophisticated robots, such as autonomous vehicles, robotic
An Actual Driving Lesson. Learning to drive a manual car
 An Actual Driving Lesson Learning to drive a manual car Where are the controls that I might have to use in my driving: Knowing where the controls are, and being able to locate and use them without looking
An Actual Driving Lesson Learning to drive a manual car Where are the controls that I might have to use in my driving: Knowing where the controls are, and being able to locate and use them without looking
Driver Driven. InputSpeed. Gears
 Gears Gears are toothed wheels designed to transmit rotary motion and power from one part of a mechanism to another. They are fitted to shafts with special devices called keys (or splines) that ensure
Gears Gears are toothed wheels designed to transmit rotary motion and power from one part of a mechanism to another. They are fitted to shafts with special devices called keys (or splines) that ensure
TECHNOLOGY. Grade 8. Learner Teacher. Systems and Control (Mechanisms) Hoërskool Gerrit Maritz District D15
 Hoërskool Gerrit Maritz District D15") TECHNOLOGY Systems and Control (Mechanisms) Hoërskool Gerrit Maritz District D15 2009 Grade 8 Learner Teacher CAPABILITY TASK In this module you are going to make a mechanism to help a disabled boom operator
TECHNOLOGY Systems and Control (Mechanisms) Hoërskool Gerrit Maritz District D15 2009 Grade 8 Learner Teacher CAPABILITY TASK In this module you are going to make a mechanism to help a disabled boom operator
What Is an Electric Motor? How Does a Rotation Sensor Work?
 What Is an Electric Motor? How Does a Rotation Sensor Work? Electric Motors Pre-Quiz 1. What is an electric motor? 2. Name two applications (things) you use every day that use electric motors. 3. How does
What Is an Electric Motor? How Does a Rotation Sensor Work? Electric Motors Pre-Quiz 1. What is an electric motor? 2. Name two applications (things) you use every day that use electric motors. 3. How does
Simple Gears and Transmission
 Simple Gears and Transmission Simple Gears and Transmission page: of 4 How can transmissions be designed so that they provide the force, speed and direction required and how efficient will the design be?
Simple Gears and Transmission Simple Gears and Transmission page: of 4 How can transmissions be designed so that they provide the force, speed and direction required and how efficient will the design be?
Torsen Differentials - How They Work and What STaSIS Does to Improve Them For the Audi Quattro
 Torsen Differentials - How They Work and What STaSIS Does to Improve Them For the Audi Quattro One of the best bang-for-your buck products that STaSIS has developed is the center differential torque bias
Torsen Differentials - How They Work and What STaSIS Does to Improve Them For the Audi Quattro One of the best bang-for-your buck products that STaSIS has developed is the center differential torque bias
2. Explore your model. Locate and identify the gears. Watch the gear mechanism in operation as you turn the crank.
 Experiment #1 79318 Using a Spur Gear System in a Crank Fan Objectives: Understand and describe the transfer of motion through a spur gear system and investigate the relationship between gear size, speed
Experiment #1 79318 Using a Spur Gear System in a Crank Fan Objectives: Understand and describe the transfer of motion through a spur gear system and investigate the relationship between gear size, speed
Merry-go-round Building Instructions
 Merry-go-round Building Instructions Required parts (L represents length for axles) Attach the ends of two 9x1 beams using an extender pin. Continue connecting the ends of 9x1 beams using extender pins
Merry-go-round Building Instructions Required parts (L represents length for axles) Attach the ends of two 9x1 beams using an extender pin. Continue connecting the ends of 9x1 beams using extender pins
Gears and Sprockets for Basic Robotics
 Gears and Sprockets for Basic Robotics Written by George Gillard Published: 24-May-2016 Introduction Gears and Sprockets are powerful tools in robotics. They can be used to make something spin or move
Gears and Sprockets for Basic Robotics Written by George Gillard Published: 24-May-2016 Introduction Gears and Sprockets are powerful tools in robotics. They can be used to make something spin or move
Competitive VEX Robot Designer
 Competitive VEX Robot Designer Skill Set 2: Builder I Terminal Objective 2.2: construct a boom crane Performance Objective: Given provided VEX components, construct a boom crane that extends a minimum
Competitive VEX Robot Designer Skill Set 2: Builder I Terminal Objective 2.2: construct a boom crane Performance Objective: Given provided VEX components, construct a boom crane that extends a minimum
Small Robot Drive Trains. Traction and steering mechanisms. Differential Drive system
 Small Robot Drive Trains Posted on February 28, 2008, by Ibrahim KAMAL, in Robotics, tagged This Tutorial Aims to introduce to beginner the different techniques used to build the chassis and drive trains
Small Robot Drive Trains Posted on February 28, 2008, by Ibrahim KAMAL, in Robotics, tagged This Tutorial Aims to introduce to beginner the different techniques used to build the chassis and drive trains
Andy Baker Mech. Engineering Mentor: 45 (1998-present) President and Co-owner: AndyMark, Inc Championship Woodie Flowers Award
 President and Co-owner: AndyMark, Inc Championship Woodie Flowers Award") Andy Baker Mech. Engineering Mentor: 45 (1998-present) President and Co-owner: AndyMark, Inc. 2003 Championship Woodie Flowers Award Articulating Arms Telescoping Lifts Grippers Latches Turrets Ball Handling
Andy Baker Mech. Engineering Mentor: 45 (1998-present) President and Co-owner: AndyMark, Inc. 2003 Championship Woodie Flowers Award Articulating Arms Telescoping Lifts Grippers Latches Turrets Ball Handling
8.6 Investigating gear ratios using LEGO
 Tony Ford Science Monday, 1 December 2014 Page 1 8.6 Investigating ratios using LEGO Aim To investigate the relationship between speed of a wheel and the number of teeth on each connected to it? Discussion
Tony Ford Science Monday, 1 December 2014 Page 1 8.6 Investigating ratios using LEGO Aim To investigate the relationship between speed of a wheel and the number of teeth on each connected to it? Discussion
Different types of gears. Spur gears. Idler gears. Worm gears. Bevel gears. Belts & Pulleys
 GEARS Robot Gears By using different gear diameters, you can exchange between rotational (or translation) velocity and torque. by looking at the motor datasheet you can determine the output velocity and
GEARS Robot Gears By using different gear diameters, you can exchange between rotational (or translation) velocity and torque. by looking at the motor datasheet you can determine the output velocity and
The Car Tutorial Part 2 Creating a Racing Game for Unity
 The Car Tutorial Part 2 Creating a Racing Game for Unity Part 2: Tweaking the Car 3 Center of Mass 3 Suspension 5 Suspension range 6 Suspension damper 6 Drag Multiplier 6 Speed, turning and gears 8 Exporting
The Car Tutorial Part 2 Creating a Racing Game for Unity Part 2: Tweaking the Car 3 Center of Mass 3 Suspension 5 Suspension range 6 Suspension damper 6 Drag Multiplier 6 Speed, turning and gears 8 Exporting
Graphical representation of a gear
 Homework 4 Gears Gears are designed to transmit rotary motion. Often they are arranged in a gear train (meshed together). Gear trains provide a change in speed, torque (turning force) and direction (clockwise
Homework 4 Gears Gears are designed to transmit rotary motion. Often they are arranged in a gear train (meshed together). Gear trains provide a change in speed, torque (turning force) and direction (clockwise
Chapter 7: DC Motors and Transmissions. 7.1: Basic Definitions and Concepts
 Chapter 7: DC Motors and Transmissions Electric motors are one of the most common types of actuators found in robotics. Using them effectively will allow your robot to take action based on the direction
Chapter 7: DC Motors and Transmissions Electric motors are one of the most common types of actuators found in robotics. Using them effectively will allow your robot to take action based on the direction
motion table of contents: squarebot assembly 3.2 concepts to understand 3.3 subsystems interfaces 3.21 motion subsystem inventory 3.
 The subsystem of the robot is responsible for exactly that,. It includes both the motors that generate, and the wheels and gears that transfer and transform that into the desired forms. With the structural
The subsystem of the robot is responsible for exactly that,. It includes both the motors that generate, and the wheels and gears that transfer and transform that into the desired forms. With the structural
Manipulators. Example 1: The Claw
 Manipulators With these examples we will demonstrate some basic designs to accomplish each of the game piece challenges involved in the 2018 FIRST Global game Energy Impact to: 1. Collect fuel cubes and
Manipulators With these examples we will demonstrate some basic designs to accomplish each of the game piece challenges involved in the 2018 FIRST Global game Energy Impact to: 1. Collect fuel cubes and
11. GEAR TRANSMISSIONS
 11. GEAR TRANSMISSIONS 11.1. GENERAL CONSIDERATIONS Gears are one of the most important elements used in machinery. There are few mechanical devices that do not have the need to transmit power and motion
11. GEAR TRANSMISSIONS 11.1. GENERAL CONSIDERATIONS Gears are one of the most important elements used in machinery. There are few mechanical devices that do not have the need to transmit power and motion
Simple Gears and Transmission
 Simple Gears and Transmission Contents How can transmissions be designed so that they provide the force, speed and direction required and how efficient will the design be? Initial Problem Statement 2 Narrative
Simple Gears and Transmission Contents How can transmissions be designed so that they provide the force, speed and direction required and how efficient will the design be? Initial Problem Statement 2 Narrative
Unit 1 Introduction to VEX and Robotics
 Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and
Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and
Motion. Table of Contents: Introduction to the Motion Subsystem 3.2. Concepts to Understand 3.8. Subsystem Interactions Motion.
 The Motion Subsystem of the robot is responsible for exactly that, motion. It includes both the motors that generate motion, and the wheels and gears that transfer and transform that motion into the desired
The Motion Subsystem of the robot is responsible for exactly that, motion. It includes both the motors that generate motion, and the wheels and gears that transfer and transform that motion into the desired
MANUAL TRANSMISSION SERVICE
 MANUAL TRANSMISSION SERVICE Introduction Internal combustion engines develop very little torque or power at low rpm. This is especially obvious when you try to start out in direct drive, 4th gear in a
MANUAL TRANSMISSION SERVICE Introduction Internal combustion engines develop very little torque or power at low rpm. This is especially obvious when you try to start out in direct drive, 4th gear in a
Mechanisms and Structures. Mechanical Systems. Levers. Basic Forces
 Mechanisms and Structures Mechanical Systems Levers Basic Forces Pupil Name Teacher Class Page 1 MECHANICAL SYSTEMS Our every day lives are made much easier by a variety of mechanical systems that help
Mechanisms and Structures Mechanical Systems Levers Basic Forces Pupil Name Teacher Class Page 1 MECHANICAL SYSTEMS Our every day lives are made much easier by a variety of mechanical systems that help
structure table of contents: squarebot chassis parts and assembly 2.2 concepts to understand 2.27 subsystems interfaces 2.37
 The structural subsystem of the robot is responsible for physical support. It holds everything in place, and is, in effect, the durable skeleton of the robot to which all the other subsystems are attached.
The structural subsystem of the robot is responsible for physical support. It holds everything in place, and is, in effect, the durable skeleton of the robot to which all the other subsystems are attached.
CHAPTER 6 GEARS CHAPTER LEARNING OBJECTIVES
 CHAPTER 6 GEARS CHAPTER LEARNING OBJECTIVES Upon completion of this chapter, you should be able to do the following: Compare the types of gears and their advantages. Did you ever take a clock apart to
CHAPTER 6 GEARS CHAPTER LEARNING OBJECTIVES Upon completion of this chapter, you should be able to do the following: Compare the types of gears and their advantages. Did you ever take a clock apart to
Name: Period: Due Date: Physics Project: Balloon Powered Car
 Name: Period: Due Date: Physics Project: Balloon Powered Car Challenge: Design and build a balloon car that will travel the greatest distance in the Balloon Car Cup. To do this, you must combine key concepts
Name: Period: Due Date: Physics Project: Balloon Powered Car Challenge: Design and build a balloon car that will travel the greatest distance in the Balloon Car Cup. To do this, you must combine key concepts
NEW CAR TIPS. Teaching Guidelines
 NEW CAR TIPS Teaching Guidelines Subject: Algebra Topics: Patterns and Functions Grades: 7-12 Concepts: Independent and dependent variables Slope Direct variation (optional) Knowledge and Skills: Can relate
NEW CAR TIPS Teaching Guidelines Subject: Algebra Topics: Patterns and Functions Grades: 7-12 Concepts: Independent and dependent variables Slope Direct variation (optional) Knowledge and Skills: Can relate
Troubleshooting Guide for Limoss Systems
 Troubleshooting Guide for Limoss Systems NOTE: Limoss is a manufacturer and importer of linear actuators (motors) hand controls, power supplies, and cables for motion furniture. They are quickly becoming
Troubleshooting Guide for Limoss Systems NOTE: Limoss is a manufacturer and importer of linear actuators (motors) hand controls, power supplies, and cables for motion furniture. They are quickly becoming
Lifting Mechanisms. Example 1: Two Stage Lift
 Lifting Mechanisms The primary scoring method for the 2018 game is to deposit fuel cubes into scoring zones. A manipulator fixed to your robot can deliver fuel cubes into ground level scoring zones, but
Lifting Mechanisms The primary scoring method for the 2018 game is to deposit fuel cubes into scoring zones. A manipulator fixed to your robot can deliver fuel cubes into ground level scoring zones, but
Applications in Design & Engine. Analyzing Compound, Robotic Machines
 v2.1 Compound Machines ering Applications in Design & Engine Analyzing Compound, Robotic Machines Educational Objectives At the conclusion of this lesson, students should be able to: Understand the relationship
v2.1 Compound Machines ering Applications in Design & Engine Analyzing Compound, Robotic Machines Educational Objectives At the conclusion of this lesson, students should be able to: Understand the relationship
4.2 Friction. Some causes of friction
 4.2 Friction Friction is a force that resists motion. Friction is found everywhere in our world. You feel the effects of when you swim, ride in a car, walk, and even when you sit in a chair. Friction can
4.2 Friction Friction is a force that resists motion. Friction is found everywhere in our world. You feel the effects of when you swim, ride in a car, walk, and even when you sit in a chair. Friction can
Robotic Vehicle Challenge
 Robotic Vehicle Challenge Hello and welcome to your first team challenge! Within this document you will find information about what to expect and prepare for to be successful in your first challenge. In
Robotic Vehicle Challenge Hello and welcome to your first team challenge! Within this document you will find information about what to expect and prepare for to be successful in your first challenge. In
DESIGN AND TECHNOLOGY
 Candidate Name Centre Number 0 Candidate Number GCSE 142/04 DESIGN AND TECHNOLOGY PAPER 2 FOCUS AREA: SYSTEMS AND CONTROL TECHNOLOGY Higher Tier A.M. MONDAY, 2 June 2008 1 1 2 hours Leave Blank Question
Candidate Name Centre Number 0 Candidate Number GCSE 142/04 DESIGN AND TECHNOLOGY PAPER 2 FOCUS AREA: SYSTEMS AND CONTROL TECHNOLOGY Higher Tier A.M. MONDAY, 2 June 2008 1 1 2 hours Leave Blank Question
ALIGNING A 2007 CADILLAC CTS-V
 ALIGNING A 2007 CADILLAC CTS-V I ll describe a four-wheel alignment of a 2007 Cadillac CTS-V in this document using homemade alignment tools. I described the tools in a previous document. The alignment
ALIGNING A 2007 CADILLAC CTS-V I ll describe a four-wheel alignment of a 2007 Cadillac CTS-V in this document using homemade alignment tools. I described the tools in a previous document. The alignment
Robot Preparation for the VEX World Championship/ US Open. Lessons learned over the past 6 years by David Kelly 2013 VWC, Teacher of the Year
 Robot Preparation for the VEX World Championship/ US Open Lessons learned over the past 6 years by David Kelly 2013 VWC, Teacher of the Year Re-designing Re-designing your robot to a new concept yields
Robot Preparation for the VEX World Championship/ US Open Lessons learned over the past 6 years by David Kelly 2013 VWC, Teacher of the Year Re-designing Re-designing your robot to a new concept yields
CHASSIS DYNAMICS TABLE OF CONTENTS A. DRIVER / CREW CHIEF COMMUNICATION I. CREW CHIEF COMMUNICATION RESPONSIBILITIES
 CHASSIS DYNAMICS TABLE OF CONTENTS A. Driver / Crew Chief Communication... 1 B. Breaking Down the Corner... 3 C. Making the Most of the Corner Breakdown Feedback... 4 D. Common Feedback Traps... 4 E. Adjustment
CHASSIS DYNAMICS TABLE OF CONTENTS A. Driver / Crew Chief Communication... 1 B. Breaking Down the Corner... 3 C. Making the Most of the Corner Breakdown Feedback... 4 D. Common Feedback Traps... 4 E. Adjustment
Pre-lab Questions: Please review chapters 19 and 20 of your textbook
 Introduction Magnetism and electricity are closely related. Moving charges make magnetic fields. Wires carrying electrical current in a part of space where there is a magnetic field experience a force.
Introduction Magnetism and electricity are closely related. Moving charges make magnetic fields. Wires carrying electrical current in a part of space where there is a magnetic field experience a force.
Transmissions. Pat Willoughby Wednesday Section 2/16/2005
 Transmissions Pat Willoughby Wednesday Section /6/005 Strategies -> Concepts -> Modules Strategies (What are you going to do?) Basic movements on table, how you will score Analysis of times to move, physics
Transmissions Pat Willoughby Wednesday Section /6/005 Strategies -> Concepts -> Modules Strategies (What are you going to do?) Basic movements on table, how you will score Analysis of times to move, physics
Copyright Notice. Small Motor, Gearmotor and Control Handbook Copyright Bodine Electric Company. All rights reserved.
 Copyright Notice Small Motor, Gearmotor and Control Handbook Copyright 1993-2003 Bodine Electric Company. All rights reserved. Unauthorized duplication, distribution, or modification of this publication,
Copyright Notice Small Motor, Gearmotor and Control Handbook Copyright 1993-2003 Bodine Electric Company. All rights reserved. Unauthorized duplication, distribution, or modification of this publication,
The man with the toughest job in F1
 The man with the toughest job in F1 Tyres are the key to performance in Formula 1, and as Caterham s Head of Tyres, Peter Hewson s job is to know as much about them as possible. There s only one problem:
The man with the toughest job in F1 Tyres are the key to performance in Formula 1, and as Caterham s Head of Tyres, Peter Hewson s job is to know as much about them as possible. There s only one problem:
Load cells for a Portable Structure
 Load cells for a Portable Structure Load Restoring force Side force We know that a weighing system must be rigid to get good results. We should also know that a three point system is inherently more stable
Load cells for a Portable Structure Load Restoring force Side force We know that a weighing system must be rigid to get good results. We should also know that a three point system is inherently more stable
Lockpicking Tools: User Guide
 Lockpicking Tools: User Guide Tips & Tricks for using Lockpicking Tools Contents Introduction..3 Padlock Shims..5 Comb Picks....7 Jiggler Keys...9 The Lock Gun..11 Bypass Sheets....13 Bump Keys...14 Other
Lockpicking Tools: User Guide Tips & Tricks for using Lockpicking Tools Contents Introduction..3 Padlock Shims..5 Comb Picks....7 Jiggler Keys...9 The Lock Gun..11 Bypass Sheets....13 Bump Keys...14 Other
BIG BAR SOFT SPRING SET UP SECRETS
 BIG BAR SOFT SPRING SET UP SECRETS Should you be jumping into the latest soft set up craze for late model asphalt cars? Maybe you will find more speed or maybe you won t, but either way understanding the
BIG BAR SOFT SPRING SET UP SECRETS Should you be jumping into the latest soft set up craze for late model asphalt cars? Maybe you will find more speed or maybe you won t, but either way understanding the
THE TORQUE GENERATOR OF WILLIAM F. SKINNER
 THE TORQUE GENERATOR OF WILLIAM F. SKINNER IN 1939, WHICH WAS THE START OF WORLD WAR TWO, WILLIAM SKINNER OF MIAMI IN FLORIDA DEMONSTRATED HIS FIFTH-GENERATION SYSTEM WHICH WAS POWERED BY SPINNING WEIGHTS.
THE TORQUE GENERATOR OF WILLIAM F. SKINNER IN 1939, WHICH WAS THE START OF WORLD WAR TWO, WILLIAM SKINNER OF MIAMI IN FLORIDA DEMONSTRATED HIS FIFTH-GENERATION SYSTEM WHICH WAS POWERED BY SPINNING WEIGHTS.
Gear Drives. A third gear added to the system will rotate in the same direction as the drive gear Equal diameters = Equal number of teeth = Same speed
 Gear Drive Systems Gear Drives Gear Drive: Synchronous mechanical drive that uses gears to transfer power Gear: A toothed wheel that meshes with other toothed wheels to transfer rotational power Pinion
Gear Drive Systems Gear Drives Gear Drive: Synchronous mechanical drive that uses gears to transfer power Gear: A toothed wheel that meshes with other toothed wheels to transfer rotational power Pinion
Manipulators for FIRST FRC Robotics
 Manipulators for FIRST FRC Robotics FIRST Fare 2017 Bruce Whitefield Mentor, Team 2471 Manipulate What? Game pieces come in many sizes and shapes Manipulate How? Game objectives change each year Lift Dump
Manipulators for FIRST FRC Robotics FIRST Fare 2017 Bruce Whitefield Mentor, Team 2471 Manipulate What? Game pieces come in many sizes and shapes Manipulate How? Game objectives change each year Lift Dump
The HMC Heavy Metal Chassis Construction Guide using Timing Pulleys and Belts
 The HMC Heavy Metal Chassis Construction Guide using Timing Pulleys and Belts The Heavy Metal Chassis is constructed using two identical drive modules. Power can be transmitted from the motors to the wheels
The HMC Heavy Metal Chassis Construction Guide using Timing Pulleys and Belts The Heavy Metal Chassis is constructed using two identical drive modules. Power can be transmitted from the motors to the wheels
Mechanics and Mechanisms. What is do you think about when you hear the word mechanics? Mechanics. Is this a mechanism? 2/17/2011
 Mechanics and Mechanisms What is do you think about when you hear the word mechanics? Mechanics Mechanics is the study of how things move Is this a mechanism? Concerned with creating useful movement through
Mechanics and Mechanisms What is do you think about when you hear the word mechanics? Mechanics Mechanics is the study of how things move Is this a mechanism? Concerned with creating useful movement through
GEAR CONTENTS POWER TRANSMISSION GEAR TYPES OF GEARS NOMENCLATURE APPLICATIONS OF GEARS VELOCITY RATIO GEAR TRAINS EXAMPLE PROBLEMS AND QUESTIONS
 GEAR CONTENTS POWER TRANSMISSION GEAR TYPES OF GEARS NOMENCLATURE APPLICATIONS OF GEARS VELOCITY RATIO GEAR TRAINS EXAMPLE PROBLEMS AND QUESTIONS GEAR.. Power transmission is the movement of energy from
GEAR CONTENTS POWER TRANSMISSION GEAR TYPES OF GEARS NOMENCLATURE APPLICATIONS OF GEARS VELOCITY RATIO GEAR TRAINS EXAMPLE PROBLEMS AND QUESTIONS GEAR.. Power transmission is the movement of energy from
RANDY Then it basically leaves and moves over into the paint shop.
 KIA Motors Manufacturing Georgia Today on Fast Forward, we re visiting the west side of the state, West Point to be exact, looking for another great Georgia company for this episode. So we uh oh great.
KIA Motors Manufacturing Georgia Today on Fast Forward, we re visiting the west side of the state, West Point to be exact, looking for another great Georgia company for this episode. So we uh oh great.
Chapter seven. Gears. Laith Batarseh
 Chapter seven Gears Laith Batarseh Gears are very important in power transmission between a drive rotor and driven rotor What are the functions of gears? - Transmit motion and torque (power) between shafts
Chapter seven Gears Laith Batarseh Gears are very important in power transmission between a drive rotor and driven rotor What are the functions of gears? - Transmit motion and torque (power) between shafts
M3 Design Product Teardown Kobalt Double-Drive Screwdriver
 19 Jun, 2013 Why do the product teardowns? M3 Design Product Teardown Kobalt Double-Drive Screwdriver Part of the product development process is to apply knowledge gained from prior experience during the
19 Jun, 2013 Why do the product teardowns? M3 Design Product Teardown Kobalt Double-Drive Screwdriver Part of the product development process is to apply knowledge gained from prior experience during the
How to use the Multirotor Motor Performance Data Charts
 How to use the Multirotor Motor Performance Data Charts Here at Innov8tive Designs, we spend a lot of time testing all of the motors that we sell, and collect a large amount of data with a variety of propellers.
How to use the Multirotor Motor Performance Data Charts Here at Innov8tive Designs, we spend a lot of time testing all of the motors that we sell, and collect a large amount of data with a variety of propellers.
Demystifying the Use of Frameless Motors in Robotics
 WHITEPAPER Demystifying the Use of Frameless Motors in Robotics TABLE OF CONTENTS EXECUTIVE SUMMARY: THE VALUE OF FRAMELESS MOTORS IN ROBOTICS ENGINEERS: WHY IS THIS ARTICLE FOR YOU? ADVANTAGES OF FRAMELESS
WHITEPAPER Demystifying the Use of Frameless Motors in Robotics TABLE OF CONTENTS EXECUTIVE SUMMARY: THE VALUE OF FRAMELESS MOTORS IN ROBOTICS ENGINEERS: WHY IS THIS ARTICLE FOR YOU? ADVANTAGES OF FRAMELESS
Mini EV Prize Solar Car Kit
 Mini EV Prize Solar Car Kit Each Kit includes 2 x Solar Panels 8 x Wheels 4 x 50mm, 4 x 40mm 2 x Axels (short & long) & 4 x Axel Collars 1 x Motor - F18 & 3D printed mount 2 x Large Spur Gear 60T & 48T
Mini EV Prize Solar Car Kit Each Kit includes 2 x Solar Panels 8 x Wheels 4 x 50mm, 4 x 40mm 2 x Axels (short & long) & 4 x Axel Collars 1 x Motor - F18 & 3D printed mount 2 x Large Spur Gear 60T & 48T
VEX IQ Curriculum: Let s Get Started
 VEX IQ Curriculum: Let s Get Started Let s Get Started Student Handout Using VEX IQ Hardware The VEX IQ platform kits provide easy, fun, and accessible tools to teach and learn all four legs of STEM, no
VEX IQ Curriculum: Let s Get Started Let s Get Started Student Handout Using VEX IQ Hardware The VEX IQ platform kits provide easy, fun, and accessible tools to teach and learn all four legs of STEM, no
DESIGN AND TECHNOLOGY
 Candidate Name Centre Number 0 Candidate Number GCSE 142/02 DESIGN AND TECHNOLOGY PAPER 2 FOCUS AREA: SYSTEMS AND CONTROL TECHNOLOGY Foundation Tier A.M. MONDAY, 2 June 2008 1 1 2 hours Leave Blank Question
Candidate Name Centre Number 0 Candidate Number GCSE 142/02 DESIGN AND TECHNOLOGY PAPER 2 FOCUS AREA: SYSTEMS AND CONTROL TECHNOLOGY Foundation Tier A.M. MONDAY, 2 June 2008 1 1 2 hours Leave Blank Question
Technology Exploration-I Curriculum Development Unit
 Technology Exploration-I Modu le 4: Pulleys and Gears PREPARED BY Curriculum Development Unit August 2013 Applied Technology High Schools, 2013 Module 4: Pulleys and Gears Module Objectives After the completion
Technology Exploration-I Modu le 4: Pulleys and Gears PREPARED BY Curriculum Development Unit August 2013 Applied Technology High Schools, 2013 Module 4: Pulleys and Gears Module Objectives After the completion
An Actual Driving Lesson Learning to drive an automatic car
 An Actual Driving Lesson Learning to drive an automatic car Where are the controls that I might have to use in my driving: Knowing where the controls are, and being able to locate and use them without
An Actual Driving Lesson Learning to drive an automatic car Where are the controls that I might have to use in my driving: Knowing where the controls are, and being able to locate and use them without
Math is Not a Four Letter Word FTC Kick-Off. Andy Driesman FTC4318 Green Machine Reloaded
 1 Math is Not a Four Letter Word 2017 FTC Kick-Off Andy Driesman FTC4318 Green Machine Reloaded andrew.driesman@gmail.com 2 Goals Discuss concept of trade space/studies Demonstrate the importance of using
1 Math is Not a Four Letter Word 2017 FTC Kick-Off Andy Driesman FTC4318 Green Machine Reloaded andrew.driesman@gmail.com 2 Goals Discuss concept of trade space/studies Demonstrate the importance of using
Customer Engagement - Execution Playbook Module 1 WHEEL ALIGNMENTS ALIGNMENTS
 Customer Engagement - Execution Playbook Module 1 WHEEL ALIGNMENTS -------------------------- ALIGNMENTS 101 ------------------------------ While a wheel alignment is often referred to simply as an alignment,
Customer Engagement - Execution Playbook Module 1 WHEEL ALIGNMENTS -------------------------- ALIGNMENTS 101 ------------------------------ While a wheel alignment is often referred to simply as an alignment,
Roehrig Engineering, Inc.
 Roehrig Engineering, Inc. Home Contact Us Roehrig News New Products Products Software Downloads Technical Info Forums What Is a Shock Dynamometer? by Paul Haney, Sept. 9, 2004 Racers are beginning to realize
Roehrig Engineering, Inc. Home Contact Us Roehrig News New Products Products Software Downloads Technical Info Forums What Is a Shock Dynamometer? by Paul Haney, Sept. 9, 2004 Racers are beginning to realize
VEHICLE TOWING SAFETY
 When you've got the correct gear, some practice and confidence, towing can be as easy as single-vehicle driving. Yet safety should always be your main concern when you're pulling a trailer. Because no
When you've got the correct gear, some practice and confidence, towing can be as easy as single-vehicle driving. Yet safety should always be your main concern when you're pulling a trailer. Because no
CORC Exploring Robotics. Unit B: Construction
 CORC 3303 Exploring Robotics Unit B: Construction Effectors and Actuators An effector is a device on a robot that has an impact or influence on the environment. An actuator is the mechanism that enables
CORC 3303 Exploring Robotics Unit B: Construction Effectors and Actuators An effector is a device on a robot that has an impact or influence on the environment. An actuator is the mechanism that enables
Chapter 3. Transmission Components
 Chapter 3. Transmission Components The difference between machine design and structure design An important design problem in a mechanical system is how to transmit and convert power to achieve required
Chapter 3. Transmission Components The difference between machine design and structure design An important design problem in a mechanical system is how to transmit and convert power to achieve required
Linear Shaft Motors in Parallel Applications
 Linear Shaft Motors in Parallel Applications Nippon Pulse s Linear Shaft Motor (LSM) has been successfully used in parallel motor applications. Parallel applications are ones in which there are two or
Linear Shaft Motors in Parallel Applications Nippon Pulse s Linear Shaft Motor (LSM) has been successfully used in parallel motor applications. Parallel applications are ones in which there are two or
What is a Mechanism?
 Mechanisms What is a Mechanism? A mechanism is the part of a machine which contains two or more pieces arranged so that the motion of one compels the motion of the others. Generally used to: Change the
Mechanisms What is a Mechanism? A mechanism is the part of a machine which contains two or more pieces arranged so that the motion of one compels the motion of the others. Generally used to: Change the
CH#13 Gears-General. Drive and Driven Gears 3/13/2018
 CH#13 Gears-General A toothed wheel that engages another toothed mechanism in order to change the speed or direction of transmitted motion The gear set transmits rotary motion and force. Gears are used
CH#13 Gears-General A toothed wheel that engages another toothed mechanism in order to change the speed or direction of transmitted motion The gear set transmits rotary motion and force. Gears are used
LEGO Gears and Motors
 LEGO Gears and Motors Motors are devices that convert electrical energy into mechanical movement. For a motor of a given design and operating voltage (LEGO motors are designed to operate at 9 volts) there
LEGO Gears and Motors Motors are devices that convert electrical energy into mechanical movement. For a motor of a given design and operating voltage (LEGO motors are designed to operate at 9 volts) there
Playing with Gears. Solutions in this chapter: Counting Teeth. Gearing Up and Down. Riding That Train: The Geartrain. Placing and Fitting Gears
 Chapter 2 Playing with Gears Solutions in this chapter: Counting Teeth Gearing Up and Down Riding That Train: The Geartrain Worming Your Way: The Worm Gear Limiting Strength with the Clutch Gear Placing
Chapter 2 Playing with Gears Solutions in this chapter: Counting Teeth Gearing Up and Down Riding That Train: The Geartrain Worming Your Way: The Worm Gear Limiting Strength with the Clutch Gear Placing
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF MECHANICAL ENGINEERING
 KINGS COLLEGE OF ENGINEERING DEPARTMENT OF MECHANICAL ENGINEERING QUESTION BANK Sub Code/Name: ME 1352 DESIGN OF TRANSMISSION SYSTEMS Year/Sem: III / VI UNIT-I (Design of transmission systems for flexible
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF MECHANICAL ENGINEERING QUESTION BANK Sub Code/Name: ME 1352 DESIGN OF TRANSMISSION SYSTEMS Year/Sem: III / VI UNIT-I (Design of transmission systems for flexible
2012 Baja SAE Drivetrain
 2012 Baja SAE Drivetrain A thesis submitted to the Faculty of the Mechanical Engineering Technology Program of the University of Cincinnati in partial fulfillment of the requirements for the degree of
2012 Baja SAE Drivetrain A thesis submitted to the Faculty of the Mechanical Engineering Technology Program of the University of Cincinnati in partial fulfillment of the requirements for the degree of
Mechanical Considerations for Servo Motor and Gearhead Sizing
 PDHonline Course M298 (3 PDH) Mechanical Considerations for Servo Motor and Gearhead Sizing Instructor: Chad A. Thompson, P.E. 2012 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658
PDHonline Course M298 (3 PDH) Mechanical Considerations for Servo Motor and Gearhead Sizing Instructor: Chad A. Thompson, P.E. 2012 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658
index Page numbers shown in italic indicate figures. Numbers & Symbols
 index Page numbers shown in italic indicate figures. Numbers & Symbols 12T gear, 265 24T gear, 265 36T gear, 265 / (division operator), 332 % (modulo operator), 332 * (multiplication operator), 332 A accelerating
index Page numbers shown in italic indicate figures. Numbers & Symbols 12T gear, 265 24T gear, 265 36T gear, 265 / (division operator), 332 % (modulo operator), 332 * (multiplication operator), 332 A accelerating
ROBOT C CHALLENGE DESIGN DOCUMENT TEAM NAME. Sample Design Document. Bolt EVA. Lightning. RoboGirls. Cloud9. Femmebots
 ROBOT C CHALLENGE DESIGN DOCUMENT TEAM NAME (SELECT TEAM NAME TO NAVIGATE TO THE TEAM S DESIGN DOCUMENT) Sample Design Document Bolt EVA Lightning RoboGirls Cloud9 Femmebots SAMPLE ROBOT C DESIGN DOCUMENT
ROBOT C CHALLENGE DESIGN DOCUMENT TEAM NAME (SELECT TEAM NAME TO NAVIGATE TO THE TEAM S DESIGN DOCUMENT) Sample Design Document Bolt EVA Lightning RoboGirls Cloud9 Femmebots SAMPLE ROBOT C DESIGN DOCUMENT
The Mark Ortiz Automotive
 July 2004 WELCOME Mark Ortiz Automotive is a chassis consulting service primarily serving oval track and road racers. This newsletter is a free service intended to benefit racers and enthusiasts by offering
July 2004 WELCOME Mark Ortiz Automotive is a chassis consulting service primarily serving oval track and road racers. This newsletter is a free service intended to benefit racers and enthusiasts by offering
Solar Matters III Teacher Page
 Solar Matters III Teacher Page Junior Solar Sprint Wheels, Axles & Bearing Student Objective The student: given a scenario of a design with wheels, will be able to predict how the design will function
Solar Matters III Teacher Page Junior Solar Sprint Wheels, Axles & Bearing Student Objective The student: given a scenario of a design with wheels, will be able to predict how the design will function
PRESEASON CHASSIS SETUP TIPS
 PRESEASON CHASSIS SETUP TIPS A Setup To-Do List to Get You Started By Bob Bolles, Circle Track Magazine When we recently set up our Project Modified for our first race, we followed a simple list of to-do
PRESEASON CHASSIS SETUP TIPS A Setup To-Do List to Get You Started By Bob Bolles, Circle Track Magazine When we recently set up our Project Modified for our first race, we followed a simple list of to-do
Dynamics of Machines. Prof. Amitabha Ghosh. Department of Mechanical Engineering. Indian Institute of Technology, Kanpur. Module No.
 Dynamics of Machines Prof. Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module No. # 04 Lecture No. # 03 In-Line Engine Balancing In the last session, you
Dynamics of Machines Prof. Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module No. # 04 Lecture No. # 03 In-Line Engine Balancing In the last session, you
Magnets. Unit 6. How do magnets work? In this Unit, you will learn:
 Previously From Page 220 Forces appear whenever two objects interact. From Page 225 Unbalanced forces cause the motion of a body to change. Unit 6 Magnets How do magnets work? Magnets are interesting things
Previously From Page 220 Forces appear whenever two objects interact. From Page 225 Unbalanced forces cause the motion of a body to change. Unit 6 Magnets How do magnets work? Magnets are interesting things