The Ben Franklin Racing Team and the DARPA Urban Challenge
|
|
|
- Bernice Johns
- 5 years ago
- Views:
Transcription

1 The Ben Franklin Racing Team and the DARPA Urban Challenge Jon Bohren, Jason Derenick, Tully Foote, Jim Keller, Alex Kushleyev, Daniel Lee, Brian Satterfield, John Spletzer, Alex Stewart, Paul Vernaza Department of Computer Science & Engineering P.C. Rossin College of Engineering and Applied Science
2 A Pressing Mandate In the 2001 National Defense Authorization Act for Fiscal Year 2001, Public Law , Congress mandated in Section 220 that: It shall be a goal of the Armed Forces to achieve the fielding of unmanned, remotely controlled technology such that by 2015, one-third of the operational ground combat vehicles are unmanned.
 The age of 65 is projected to increase from 36 million in 2004 to over 70 million by")

3 Additional Motivation Automobility for the Elderly Automated Transport & Retrieval System (ATRS) The age of 65 is projected to increase from 36 million in 2004 to over 70 million by 2030, this number will only increase Increasingly, these people live in suburban and rural areas where public transportation services are limited Loss of personal automobile = loss of independence
 Stanford s Junior 2 nd (269 min) Virginia Tech s Odin 3 rd (277 min) BFRT Little Ben finishes 4 th in 305")
4 The Urban Challenge Summary November mile race in an urban setting 6 hour time limit $2M 1 st prize, $1M 2 nd, $500K 3 rd International Funding line for Track A teams 35 Semi-finalists; 11 finalists Final Result: CMU s Boss finishes 1 st (250 min) Stanford s Junior 2 nd (269 min) Virginia Tech s Odin 3 rd (277 min) BFRT Little Ben finishes 4 th in 305 min (est.)


5 The Ben Franklin Racing Team

6 The Big Three
")

7 Drive by Wire System Installed by Electronic Mobility Controls (EMC) Computer interface to car steering, brakes, shifting, lights, horn, turn signals, etc.


8 Sensors Velodyne LIDAR SICK LIDARs Hokuyo LIDARs Bumblebee stereo camera OxTS 3050 GPS/IMU Gigbait ethernet Interface


9 Ben s Computer Network 6 Mac Minis running Ubuntu Spread Toolkit for IPC monit for process monitoring




10 Now it s a Just Software Problem Ben runs on less than 5,000 lines of Matlab code Other teams had ,000 lines of code
11 LIDAR Signal Processing Ben relied almost entirely on LIDARs for exteroceptive sensing Two fundamental problems in sensing Reconstruction Data association LIDARs excel at the former, but outliers can compromise the latter Strategy: Spatial Consistency Temporal Filtering Beam-based calibration Reflectivity for lane markings Robust estimation strategies for road segmentation

12 Velodyne HDL-64E

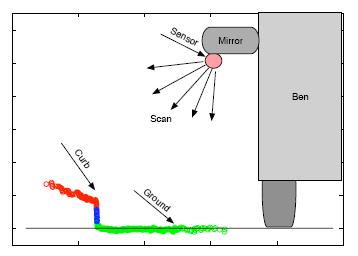
13 Sick LMS291s for Road/Lane Segmentation 5m 7m
14 Iterative Re-weighted Least Squares Incorporates simple temporal filtering Assumes true model is slow changing w.r.t. time Computing g k = m k b k [ ] T More weight! Less weight! g k 1 Default Calibration Bias

15 LIDAR Based Road Classification
16 Sick LD-LRS (and Velodyne) for Vehicle Tracking No time or money for RADAR Obstacles grouped into local line features Line features tracked across multiple scans using a multihypothesis Kalman filter Binary filter based on upon prior size and velocity constraints
17 Vehicle Tracking Requirements Velodyne & LD-LRS could reliably detect moving vehicles at ~60 meters Sufficient sensor range to detect a vehicle at a relative speed of 60 mph with sufficient time to properly react and stop

18


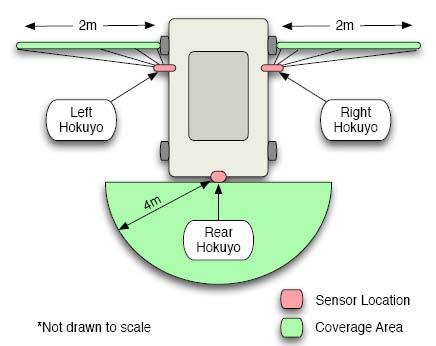
19 Hokuyo URG-04LX LIDARs



20 Vision Based Lane Tracking
21 Planning & Path Follower Global Mission Planner computes optimal sequence of waypoints Local mode-specific planner computes detailed path in dynamic map Lane following Intersections Zones Path planner uses bicycle model to predict vehicle poses after a set of possible steering commands Choose the steering command that minimizes the cost function




22 The National Qualification Event Test Courses Three test areas Area A: Merging traffic Area B: Navigation, blocked roads, parking Area C: Intersection precedence, blockages, dynamic course



23 NQE Proving Grounds - El Mirage Dry Lakebed


24 Curbs are Hard to See (and just plain hard)
 occluded the Velodyne at times to")

25 Sick LD-LRS Proves Useful in Merges NQE Course A signage (and speed limit LED display) occluded the Velodyne at times to oncoming traffic LD-LRS units on corners were able to detect RADAR may have been a better solution (?) * Course A Figure from Wikipedia

26 Still Adding Hardware!
27 UFE: Ben s out of the Chute!

28 Ben s Perspective
29 Not so Urban
")
30 Little Ben (Almost) Retired

31 The Highlight of the Race!

32 The Highlight of the Race!



33 Crossing the Finish Line!

34 No Prize Money, but
35 The Winnowing Process October 06: May 07: Aug 07: 26 Oct 07: 01 Nov 07: 03 Nov 07: 89 teams (78 Track B) 53 teams after video submission (42 Track B) 36 teams after DARPA site visits (26 Track B) 35 NQE semifinalists (26 Track B) 11 teams chosen as Finalists (4 Track B) 6 teams finish the UFE (1 Track B)


36 BFRT at Victorville Penn Jon Bohren Tully Foote Alex Kushleyev Dan Lee Alex Stewart Paul Vernaza Lehigh Jason Derenick John Spletzer Lockheed Heeton Choxi Drew Houston Brian Satterfield
37 Many Other People to Thank at Home! Allen Biddinger, Gilad Buchman, Kostas Daniilidis, Rich Fritz, Daniel Garofalo, Chao Gao, Erika Gross, Ani Hsieh, Steve Jamison, Jim Keller, Vijay Kumar, Bob Lightner, Gerry Mayer, Tom Miller, George Pappas, Ray Quinn, Ellen Solvibile, CJ Taylor, Chris Wojciechowski and many others CSE398/ Spring 2007 Class LU Police Department Mitch Herbets, President/CEO, Thales Communications

38 Thanks for Listening!
Odin s Journey. Development of Team Victor Tango s Autonomous Vehicle for the DARPA Urban Challenge. Jesse Hurdus. Dennis Hong. December 9th, 2007
 Odin s Journey Development of Team Victor Tango s Autonomous Vehicle for the DARPA Urban Challenge Dennis Hong Assistant Professor Robotics & Mechanisms Laboratory (RoMeLa) dhong@vt.edu December 9th, 2007
Odin s Journey Development of Team Victor Tango s Autonomous Vehicle for the DARPA Urban Challenge Dennis Hong Assistant Professor Robotics & Mechanisms Laboratory (RoMeLa) dhong@vt.edu December 9th, 2007
Vehicles at Volkswagen
 Autonomous Driving and Intelligent Vehicles at Volkswagen Dirk Langer, Ph.D. VW Autonomous Driving Story 2000 2003 2006 Robot Klaus Purpose: Replace test drivers on poor test tracks (job safety) Robot
Autonomous Driving and Intelligent Vehicles at Volkswagen Dirk Langer, Ph.D. VW Autonomous Driving Story 2000 2003 2006 Robot Klaus Purpose: Replace test drivers on poor test tracks (job safety) Robot
Unmanned autonomous vehicles in air land and sea
 based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
Introduction Projects Basic Design Perception Motion Planning Mission Planning Behaviour Conclusion. Autonomous Vehicles
 Dipak Chaudhari Sriram Kashyap M S 2008 Outline 1 Introduction 2 Projects 3 Basic Design 4 Perception 5 Motion Planning 6 Mission Planning 7 Behaviour 8 Conclusion Introduction Unmanned Vehicles: No driver
Dipak Chaudhari Sriram Kashyap M S 2008 Outline 1 Introduction 2 Projects 3 Basic Design 4 Perception 5 Motion Planning 6 Mission Planning 7 Behaviour 8 Conclusion Introduction Unmanned Vehicles: No driver
n the predawn hours of Saturday, November
 s Latest Robotic Competition Focuses on Urban Environment By Scott R. Gourley n the predawn hours of Saturday, November 3, 2007, the former George Air Force Base, in Victorville, Calif., was a beehive
s Latest Robotic Competition Focuses on Urban Environment By Scott R. Gourley n the predawn hours of Saturday, November 3, 2007, the former George Air Force Base, in Victorville, Calif., was a beehive
Car Technologies Stanford and CMU
 Car Technologies Stanford and CMU Stanford Racing Stanford Racing s entry was dubbed Junior in honor of Leland Stanford Jr. Team led by Sebastian Thrun and Mike Montemerlo (from SAIL) VW Passat Primary
Car Technologies Stanford and CMU Stanford Racing Stanford Racing s entry was dubbed Junior in honor of Leland Stanford Jr. Team led by Sebastian Thrun and Mike Montemerlo (from SAIL) VW Passat Primary
Autonomous Mobile Robots and Intelligent Control Issues. Sven Seeland
 Autonomous Mobile Robots and Intelligent Control Issues Sven Seeland Overview Introduction Motivation History of Autonomous Cars DARPA Grand Challenge History and Rules Controlling Autonomous Cars MIT
Autonomous Mobile Robots and Intelligent Control Issues Sven Seeland Overview Introduction Motivation History of Autonomous Cars DARPA Grand Challenge History and Rules Controlling Autonomous Cars MIT
Cooperative Autonomous Driving and Interaction with Vulnerable Road Users
 9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
Smart Control for Electric/Autonomous Vehicles
 Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
Jimi van der Woning. 30 November 2010
 Jimi van der Woning 30 November 2010 The importance of robotic cars DARPA Hardware Software Path planning Google Car Where are we now? Future 30-11-2010 Jimi van der Woning 2/17 Currently over 800 million
Jimi van der Woning 30 November 2010 The importance of robotic cars DARPA Hardware Software Path planning Google Car Where are we now? Future 30-11-2010 Jimi van der Woning 2/17 Currently over 800 million
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
Citi's 2016 Car of the Future Symposium
 Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE. Alex Haag Munich,
 REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE Alex Haag Munich, 10.10.2017 10/9/17 Regulatory Approval of an AI-based Autonomous Vehicle 2 1 INTRO Autonomous Intelligent Driving, GmbH Launched
REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE Alex Haag Munich, 10.10.2017 10/9/17 Regulatory Approval of an AI-based Autonomous Vehicle 2 1 INTRO Autonomous Intelligent Driving, GmbH Launched
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS
 EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
CSE 352: Self-Driving Cars. Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark
 CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
ADVANCES IN INTELLIGENT VEHICLES
 ADVANCES IN INTELLIGENT VEHICLES MIKE BROWN SWRI 1 OVERVIEW Intelligent Vehicle Research Platform MARTI Intelligent Vehicle Technologies Cooperative Vehicles / Infrastructure Recent Demonstrations Conclusions
ADVANCES IN INTELLIGENT VEHICLES MIKE BROWN SWRI 1 OVERVIEW Intelligent Vehicle Research Platform MARTI Intelligent Vehicle Technologies Cooperative Vehicles / Infrastructure Recent Demonstrations Conclusions
Deep Learning Will Make Truly Self-Driving Cars a Reality
 Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
UNIVERSITÉ DE MONCTON FACULTÉ D INGÉNIERIE. Moncton, NB, Canada PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY
 FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
Progress in Self-Driving Vehicles
 Progress in Self-Driving Vehicles Chris Urmson, Google Automated driving has experienced a research renaissance over the last decade. As a research community, we have been motivated by the opportunity
Progress in Self-Driving Vehicles Chris Urmson, Google Automated driving has experienced a research renaissance over the last decade. As a research community, we have been motivated by the opportunity
Urban Challenge. Innovation Seedbed for 3D Laser Scanning
 DARPA Urban Challenge Innovation Seedbed for 3D Laser Scanning Boss, the $2 million first-prize winner. Carnegie Mellon/GM Tartan Racing Team LaserScanning he final round of the DARPA Urban Challenge took
DARPA Urban Challenge Innovation Seedbed for 3D Laser Scanning Boss, the $2 million first-prize winner. Carnegie Mellon/GM Tartan Racing Team LaserScanning he final round of the DARPA Urban Challenge took
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE. CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development
 AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
Urban Challenge Final Event
 Welcome to the DARPA Urban Challenge Final Event! The Urban Challenge accelerates the development of autonomous ground vehicle technology that can someday be used to save lives on the battlefield. It is
Welcome to the DARPA Urban Challenge Final Event! The Urban Challenge accelerates the development of autonomous ground vehicle technology that can someday be used to save lives on the battlefield. It is
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS
 MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
Rules. Mr. Ron Kurjanowicz
 Rules Mr. Ron Kurjanowicz Rules and Procedures Preliminary rules open for comment until September 1, 2004 Final rules available before October 1, 2004 DARPA will publish procedure documents with details
Rules Mr. Ron Kurjanowicz Rules and Procedures Preliminary rules open for comment until September 1, 2004 Final rules available before October 1, 2004 DARPA will publish procedure documents with details
Oakland University Presents:
 Oakland University Presents: I certify that the engineering design present in this vehicle is significant and equivalent to work that would satisfy the requirements of a senior design or graduate project
Oakland University Presents: I certify that the engineering design present in this vehicle is significant and equivalent to work that would satisfy the requirements of a senior design or graduate project
Cooperative brake technology
 Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
EcoCar3-ADAS. Project Plan. Summary. Why is This Project Important?
 EcoCar3-ADAS Project Plan Summary Scott Smith This project is the Advanced Driver Assistance System (ADAS) of the 2015-2016 Senior Design for the EcoCar3. This will be an embedded system for the EcoCar3
EcoCar3-ADAS Project Plan Summary Scott Smith This project is the Advanced Driver Assistance System (ADAS) of the 2015-2016 Senior Design for the EcoCar3. This will be an embedded system for the EcoCar3
THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA.
 GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
Autonomous Ground Vehicle Technologies Applied to the DARPA Grand Challenge
 Autonomous Ground Vehicle Technologies Applied to the DARPA Grand Challenge Carl D. Crane III*, David G. Armstrong Jr. * Mel W. Torrie **, and Sarah A. Gray ** * Center for Intelligent Machines and Robotics
Autonomous Ground Vehicle Technologies Applied to the DARPA Grand Challenge Carl D. Crane III*, David G. Armstrong Jr. * Mel W. Torrie **, and Sarah A. Gray ** * Center for Intelligent Machines and Robotics
About KPIT Sparkle 2018
 www.kpit.com About KPIT Sparkle 2018 KPIT Technologies Ltd 31 offices across 16 countries 60 Patents filed FY2017 revenues $494 Million Development Centers located in India, US, Germany, China, and Brazil
www.kpit.com About KPIT Sparkle 2018 KPIT Technologies Ltd 31 offices across 16 countries 60 Patents filed FY2017 revenues $494 Million Development Centers located in India, US, Germany, China, and Brazil
THE FUTURE OF AUTONOMOUS CARS
 Index Table of Contents Table of Contents... i List of Figures... ix Executive summary... 1 1 Introduction to autonomous cars... 3 1.1 Definitions and classifications... 3 1.2 Brief history of autonomous
Index Table of Contents Table of Contents... i List of Figures... ix Executive summary... 1 1 Introduction to autonomous cars... 3 1.1 Definitions and classifications... 3 1.2 Brief history of autonomous
WHAT DOES OUR AUTONOMOUS FUTURE LOOK LIKE?
 WHAT DOES OUR AUTONOMOUS FUTURE LOOK LIKE? The US Military sponsored 3 challenges to see if unmanned vehicles could navigate difficult off-road terrain ( Iraq type war effort?) In 2004, DARPA (Defense
WHAT DOES OUR AUTONOMOUS FUTURE LOOK LIKE? The US Military sponsored 3 challenges to see if unmanned vehicles could navigate difficult off-road terrain ( Iraq type war effort?) In 2004, DARPA (Defense
Unmanned Surface Vessels - Opportunities and Technology
 Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
An overview of the on-going OSU instrumented probe vehicle research
 An overview of the on-going OSU instrumented probe vehicle research Benjamin Coifman, PhD Associate Professor The Ohio State University Department of Civil, Environmental, and Geodetic Engineering Department
An overview of the on-going OSU instrumented probe vehicle research Benjamin Coifman, PhD Associate Professor The Ohio State University Department of Civil, Environmental, and Geodetic Engineering Department
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
THE FUTURE OF SAFETY IS HERE
 THE FUTURE OF SAFETY IS HERE TOYOTA S ADVANCED ACTIVE SAFETY PACKAGES: TSS-C AND TSS-P Crash protection starts with crash prevention. Collisions that result in injury may be caused by the delay in a driver
THE FUTURE OF SAFETY IS HERE TOYOTA S ADVANCED ACTIVE SAFETY PACKAGES: TSS-C AND TSS-P Crash protection starts with crash prevention. Collisions that result in injury may be caused by the delay in a driver
Formal Methods will not Prevent Self-Driving Cars from Having Accidents
 Formal Methods will not Prevent Self-Driving Cars from Having Accidents Thierry Fraichard INRIA, LIG-CNRS and Grenoble University Forum Méthodes Formelles Mardi 10 octobre 2017 From Mobile Robots to Self-Driving
Formal Methods will not Prevent Self-Driving Cars from Having Accidents Thierry Fraichard INRIA, LIG-CNRS and Grenoble University Forum Méthodes Formelles Mardi 10 octobre 2017 From Mobile Robots to Self-Driving
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF
 AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
Environmental Envelope Control
 Environmental Envelope Control May 26 th, 2014 Stanford University Mechanical Engineering Dept. Dynamic Design Lab Stephen Erlien Avinash Balachandran J. Christian Gerdes Motivation New technologies are
Environmental Envelope Control May 26 th, 2014 Stanford University Mechanical Engineering Dept. Dynamic Design Lab Stephen Erlien Avinash Balachandran J. Christian Gerdes Motivation New technologies are
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY
 UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
A Presentation on. Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing
 in autonomous vehicles for alerting driver during overtaking and lane changing") A Presentation on Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing Presented By: Abhishek Shriram Umachigi Department of Electrical Engineering
A Presentation on Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing Presented By: Abhishek Shriram Umachigi Department of Electrical Engineering
Intelligent Drive next LEVEL
 Daimler AG Dr. Eberhard Zeeb Senior Manager Function and Software Driver Assistance Systems Intelligent Drive next LEVEL on the way towards autonomous driving Pioneers of the Automobile Bertha Benz 1888
Daimler AG Dr. Eberhard Zeeb Senior Manager Function and Software Driver Assistance Systems Intelligent Drive next LEVEL on the way towards autonomous driving Pioneers of the Automobile Bertha Benz 1888
SAFERIDER Project FP SAFERIDER Andrea Borin November 5th, 2010 Final Event & Demonstration Leicester, UK
 SAFERIDER Project FP7-216355 SAFERIDER Advanced Rider Assistance Systems Andrea Borin andrea.borin@ymre.yamaha-motor.it ARAS: Advanced Rider Assistance Systems Speed Alert Curve Frontal Collision Intersection
SAFERIDER Project FP7-216355 SAFERIDER Advanced Rider Assistance Systems Andrea Borin andrea.borin@ymre.yamaha-motor.it ARAS: Advanced Rider Assistance Systems Speed Alert Curve Frontal Collision Intersection
AEB IWG 02. ISO Standard: FVCMS. I received the following explanation from the FVCMS author:
 ISO Standard: FVCMS I received the following explanation from the FVCMS author: The intent behind SRB was to potentially draw the driver s attention to hazards ahead of the SV before MB was enacted but
ISO Standard: FVCMS I received the following explanation from the FVCMS author: The intent behind SRB was to potentially draw the driver s attention to hazards ahead of the SV before MB was enacted but
How It Rolls Out. Vehicle Automation and the Future of Personal Transportation. Melissa Ruhl April 2015 ITE SF Bay Area
 How It Rolls Out Vehicle Automation and the Future of Personal Transportation Melissa Ruhl April 2015 ITE SF Bay Area The horseless carriage? Where are we at today? Where are we at today? Defining vehicle
How It Rolls Out Vehicle Automation and the Future of Personal Transportation Melissa Ruhl April 2015 ITE SF Bay Area The horseless carriage? Where are we at today? Where are we at today? Defining vehicle
Autopilot. From an owner s perspective
 Tesla Autopilot From an owner s perspective My Credentials I responded to a Facebook post looking for a Tesla owner with Autopilot I own a Tesla with Autopilot 2.0 I drive 66 miles, commuting from Madison
Tesla Autopilot From an owner s perspective My Credentials I responded to a Facebook post looking for a Tesla owner with Autopilot I own a Tesla with Autopilot 2.0 I drive 66 miles, commuting from Madison
GCAT. University of Michigan-Dearborn
 GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
Prototyping Collision Avoidance for suas
 Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
Robert D. Truax. June A uthor... :... Department of Mechanical Engineering May 9, 2008
 Characterization of Side-slip Dynamics in Land Rover LR3 for Improved High Speed Autonomous Control by Robert D. Truax Submitted to the Department of Mechanical Engineering in partial fulfillment of the
Characterization of Side-slip Dynamics in Land Rover LR3 for Improved High Speed Autonomous Control by Robert D. Truax Submitted to the Department of Mechanical Engineering in partial fulfillment of the
Embedding Technology in Transportation Courses Symposium on Active Student Engagement in Civil and Transportation Engineering
 Embedding Technology in Transportation Courses Symposium on Active Student Engagement in Civil and Transportation Engineering Louisiana Tech University, Ruston, LA July 24-26, 2016 Overview Introduction
Embedding Technology in Transportation Courses Symposium on Active Student Engagement in Civil and Transportation Engineering Louisiana Tech University, Ruston, LA July 24-26, 2016 Overview Introduction
Intuitive Driving: Are We There Yet? Amine Taleb, Ph.D. February 2014 I 1
 Intuitive Driving: Are We There Yet? Amine Taleb, Ph.D. February 2014 I 1 February 2014 Outline Motivation Towards Connected/Automated Driving Valeo s Technologies and Perspective Automated Driving Connected
Intuitive Driving: Are We There Yet? Amine Taleb, Ph.D. February 2014 I 1 February 2014 Outline Motivation Towards Connected/Automated Driving Valeo s Technologies and Perspective Automated Driving Connected
Leveraging AI for Self-Driving Cars at GM. Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel
 Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
AKTIV experiencing the future together. Dr. Ulrich Kreßel Daimler AG, Research Center Ulm Walter Schwertberger MAN Nutzfahrzeuge, München
 AKTIV experiencing the future together Dr. Ulrich Kreßel Daimler AG, Research Center Ulm Walter Schwertberger MAN Nutzfahrzeuge, München Traffic Vehicle Communication German research initiative AKTIV:
AKTIV experiencing the future together Dr. Ulrich Kreßel Daimler AG, Research Center Ulm Walter Schwertberger MAN Nutzfahrzeuge, München Traffic Vehicle Communication German research initiative AKTIV:
DARPA Urban Challenge Technical Report. Austin Robot Technology
 DARPA Urban Challenge Technical Report Austin Robot Technology Team Leader: Dave Tuttle {dave@austinrobot.com} Project Management: Dave Tuttle University of Texas at Austin Contact: Prof. Peter Stone {pstone@cs.utexas.edu}
DARPA Urban Challenge Technical Report Austin Robot Technology Team Leader: Dave Tuttle {dave@austinrobot.com} Project Management: Dave Tuttle University of Texas at Austin Contact: Prof. Peter Stone {pstone@cs.utexas.edu}
Our Market and Sales Outlook
 Our Market and Sales Outlook Art Blanchford Executive Vice President Sales and Product Planning 1 Leading Market Position in Large and Rapid Growing Market Addressable Market including potential opportunity
Our Market and Sales Outlook Art Blanchford Executive Vice President Sales and Product Planning 1 Leading Market Position in Large and Rapid Growing Market Addressable Market including potential opportunity
A Practical Solution to the String Stability Problem in Autonomous Vehicle Following
 A Practical Solution to the String Stability Problem in Autonomous Vehicle Following Guang Lu and Masayoshi Tomizuka Department of Mechanical Engineering, University of California at Berkeley, Berkeley,
A Practical Solution to the String Stability Problem in Autonomous Vehicle Following Guang Lu and Masayoshi Tomizuka Department of Mechanical Engineering, University of California at Berkeley, Berkeley,
Development of the SciAutonics / Auburn Engineering Autonomous Car for the Urban Challenge. Prepared for: DARPA Urban Challenge
 Development of the SciAutonics / Auburn Engineering Autonomous Car for the Urban Challenge Prepared for: DARPA Urban Challenge Prepared by: SciAutonics, LLC and Auburn University College of Engineering
Development of the SciAutonics / Auburn Engineering Autonomous Car for the Urban Challenge Prepared for: DARPA Urban Challenge Prepared by: SciAutonics, LLC and Auburn University College of Engineering
CT6 SUPER CRUISE Convenience & Personalization Guide. cadillac.com
 2018 CT6 SUPER CRUISE Convenience & Personalization Guide cadillac.com Review this guide for an overview of the Super Cruise system in your CT6. Your complete attention is required at all times while driving,
2018 CT6 SUPER CRUISE Convenience & Personalization Guide cadillac.com Review this guide for an overview of the Super Cruise system in your CT6. Your complete attention is required at all times while driving,
Optical Products in Automotive Active Safety
 Optical Products in Automotive Active Safety Per Knutsson, Autoliv Electronics AB 2014-11-12 Driven for Life Outline Introduction Active Safety Sensors in Active Safety Current Vision Systems Future Vision
Optical Products in Automotive Active Safety Per Knutsson, Autoliv Electronics AB 2014-11-12 Driven for Life Outline Introduction Active Safety Sensors in Active Safety Current Vision Systems Future Vision
Copyright 2016 by Innoviz All rights reserved. Innoviz
 Innoviz 0 Cutting Edge 3D Sensing to Enable Fully Autonomous Vehicles May 2017 Innoviz 1 Autonomous Vehicles Industry Overview Innoviz 2 Autonomous Vehicles From Vision to Reality Uber Google Ford GM 3
Innoviz 0 Cutting Edge 3D Sensing to Enable Fully Autonomous Vehicles May 2017 Innoviz 1 Autonomous Vehicles Industry Overview Innoviz 2 Autonomous Vehicles From Vision to Reality Uber Google Ford GM 3
Improving Rural Road Safety. National Conference of State Legislatures NCSL 2010 Legislative Summit Transportation Safety Committee July 26, 2010
 Improving Rural Road Safety National Conference of State Legislatures NCSL 2010 Legislative Summit Transportation Safety Committee July 26, 2010 Overview What is CERS? Why Focus on Rural? SafeRoadMaps
Improving Rural Road Safety National Conference of State Legislatures NCSL 2010 Legislative Summit Transportation Safety Committee July 26, 2010 Overview What is CERS? Why Focus on Rural? SafeRoadMaps
NavInfo HD maps make automated driving safer and more comfortable. Xiao Gong
 NavInfo HD maps make automated driving safer and more comfortable Xiao Gong Milestones 2002 2004 2006 2007 2009 2010 2011 2012 2013 2014 2015 2016 2017 JVs with NAVTEQ & TOYOTA Tsusho 1st Navi Data Supplier
NavInfo HD maps make automated driving safer and more comfortable Xiao Gong Milestones 2002 2004 2006 2007 2009 2010 2011 2012 2013 2014 2015 2016 2017 JVs with NAVTEQ & TOYOTA Tsusho 1st Navi Data Supplier
Raj Rajkumar Professor, Carnegie Mellon University Co-Director, GM-CMU Vehicular IT Lab Co-Director, GM-CMU Autonomous Driving Lab
 Raj Rajkumar Professor, Carnegie Mellon University Co-Director, GM-CMU Vehicular IT Lab Co-Director, GM-CMU Autonomous Driving Lab http://www.ece.cmu.edu/~raj raj@ece.cmu.edu In Global Volume Opportunity
Raj Rajkumar Professor, Carnegie Mellon University Co-Director, GM-CMU Vehicular IT Lab Co-Director, GM-CMU Autonomous Driving Lab http://www.ece.cmu.edu/~raj raj@ece.cmu.edu In Global Volume Opportunity
Új technológiák a közlekedésbiztonság jövőjéért
 Új technológiák a közlekedésbiztonság jövőjéért Dr. Szászi István Occupant Safety Robert Bosch Kft. 1 Outline 1. Active and Passive Safety - definition 2. Driver Information Functions 3. Driver Assistance
Új technológiák a közlekedésbiztonság jövőjéért Dr. Szászi István Occupant Safety Robert Bosch Kft. 1 Outline 1. Active and Passive Safety - definition 2. Driver Information Functions 3. Driver Assistance
The final test of a person's defensive driving ability is whether or not he or she can avoid hazardous situations and prevent accident..
 It is important that all drivers know the rules of the road, as contained in California Driver Handbook and the Vehicle Code. However, knowing the rules does not necessarily make one a safe driver. Safe
It is important that all drivers know the rules of the road, as contained in California Driver Handbook and the Vehicle Code. However, knowing the rules does not necessarily make one a safe driver. Safe
BlueBox: Complete Autonomous Vehicle Platform Using NXP Silicon at Each ADAS Node EXTERNAL USE
 BlueBox: Complete Autonomous Vehicle Platform Using NXP Silicon at Each ADAS Node Safe & Secure Mobility 90% Innovation Through Electronics Seamlessly Connected Mobility Experience ADAS Towards Self-Driving
BlueBox: Complete Autonomous Vehicle Platform Using NXP Silicon at Each ADAS Node Safe & Secure Mobility 90% Innovation Through Electronics Seamlessly Connected Mobility Experience ADAS Towards Self-Driving
DELHI TECHNOLOGICAL UNIVERSITY TEAM RIPPLE Design Report
 DELHI TECHNOLOGICAL UNIVERSITY TEAM RIPPLE Design Report May 16th, 2018 Faculty Advisor Statement: I hereby certify that the development of vehicle, described in this report has been equivalent to the
DELHI TECHNOLOGICAL UNIVERSITY TEAM RIPPLE Design Report May 16th, 2018 Faculty Advisor Statement: I hereby certify that the development of vehicle, described in this report has been equivalent to the
Monitoring Bank Erosion On the Missouri River, Lower Brule Reservation
 Monitoring Bank Erosion On the Missouri River, Lower Brule Reservation A cooperative study between the Lower Brule Sioux Tribe s Environmental Protection Office and the U.S. Geological Survey, with assistance
Monitoring Bank Erosion On the Missouri River, Lower Brule Reservation A cooperative study between the Lower Brule Sioux Tribe s Environmental Protection Office and the U.S. Geological Survey, with assistance
More Options. Less Compromise.
 More Options. Less Compromise. We make getting there easier. The destination is up to you. Toyota has a full range of mobility solutions to meet your individual needs, including the industry-first, factory
More Options. Less Compromise. We make getting there easier. The destination is up to you. Toyota has a full range of mobility solutions to meet your individual needs, including the industry-first, factory
Items to specify: 4. Motor Speed Control. Head Unit. Radar. Steering Wheel Angle. ego vehicle speed control
 Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
Intelligent Vehicle Systems
 Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
Detailed Design Review
 Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
DARPA Urban Challenge
 DARPA Urban Challenge Event Guidelines October 10, 2007 Defense Advanced Research Projects Agency 3701 North Fairfax Drive Arlington, VA 22203-1714 Document Change Summary Section & Page Number Description
DARPA Urban Challenge Event Guidelines October 10, 2007 Defense Advanced Research Projects Agency 3701 North Fairfax Drive Arlington, VA 22203-1714 Document Change Summary Section & Page Number Description
Red Team. DARPA Grand Challenge Technical Paper. Revision: 6.1 Submitted for Public Release. April 8, 2004
 Red Team DARPA Grand Challenge Technical Paper Revision: 6.1 Submitted for Public Release April 8, 2004 Team Leader: William Red L. Whittaker Email address: red@ri.cmu.edu Mailing address: Carnegie Mellon
Red Team DARPA Grand Challenge Technical Paper Revision: 6.1 Submitted for Public Release April 8, 2004 Team Leader: William Red L. Whittaker Email address: red@ri.cmu.edu Mailing address: Carnegie Mellon
BASIC MECHATRONICS ENGINEERING
 MBEYA UNIVERSITY OF SCIENCE AND TECHNOLOGY Lecture Summary on BASIC MECHATRONICS ENGINEERING NTA - 4 Mechatronics Engineering 2016 Page 1 INTRODUCTION TO MECHATRONICS Mechatronics is the field of study
MBEYA UNIVERSITY OF SCIENCE AND TECHNOLOGY Lecture Summary on BASIC MECHATRONICS ENGINEERING NTA - 4 Mechatronics Engineering 2016 Page 1 INTRODUCTION TO MECHATRONICS Mechatronics is the field of study
STUDYING THE POSSIBILITY OF INCREASING THE FLIGHT AUTONOMY OF A ROTARY-WING MUAV
 SCIENTIFIC RESEARCH AND EDUCATION IN THE AIR FORCE AFASES2017 STUDYING THE POSSIBILITY OF INCREASING THE FLIGHT AUTONOMY OF A ROTARY-WING MUAV Cristian VIDAN *, Daniel MĂRĂCINE ** * Military Technical
SCIENTIFIC RESEARCH AND EDUCATION IN THE AIR FORCE AFASES2017 STUDYING THE POSSIBILITY OF INCREASING THE FLIGHT AUTONOMY OF A ROTARY-WING MUAV Cristian VIDAN *, Daniel MĂRĂCINE ** * Military Technical
Trends in der Fahrzeugsicherheit Vortragsreihe: Innovationen in der Fahrzeugtechnik. Dipl.-Ing. James Remfrey FH Joanneum, Graz, 2.
 Trends in der Fahrzeugsicherheit Vortragsreihe: Innovationen in der Fahrzeugtechnik FH Joanneum, Graz, 2. Juni 2010 Driving You Safely: ContiGuard 2 Continental AG Strong Divisions and Business Units 3
Trends in der Fahrzeugsicherheit Vortragsreihe: Innovationen in der Fahrzeugtechnik FH Joanneum, Graz, 2. Juni 2010 Driving You Safely: ContiGuard 2 Continental AG Strong Divisions and Business Units 3
DARPA s LAGR and UPI Programs
 DARPA s LAGR and UPI Programs Larry Jackel DARPA IPTO / TTO LAGR hherminator UPI Spinner UPI Crusher Operation in Unstructured Environments 1 Desired Characteristics for UGVs Autonomous operation over
DARPA s LAGR and UPI Programs Larry Jackel DARPA IPTO / TTO LAGR hherminator UPI Spinner UPI Crusher Operation in Unstructured Environments 1 Desired Characteristics for UGVs Autonomous operation over
CT6 SUPER CRUISE Convenience & Personalization Guide. cadillac.com
 2018 CT6 SUPER CRUISE Convenience & Personalization Guide cadillac.com Review this guide for an overview of the Super Cruise system in your Cadillac CT6. Your complete attention is required at all times
2018 CT6 SUPER CRUISE Convenience & Personalization Guide cadillac.com Review this guide for an overview of the Super Cruise system in your Cadillac CT6. Your complete attention is required at all times
MIT Source Selection Sensitive
 DARPA BAA #06-36 DARPA Urban Grand Challenge The MIT Urban Grand Challenge Team Proposal Lead Organization: Massachusetts Institute of Technology Contractor s type of business: Other Educational Technical
DARPA BAA #06-36 DARPA Urban Grand Challenge The MIT Urban Grand Challenge Team Proposal Lead Organization: Massachusetts Institute of Technology Contractor s type of business: Other Educational Technical
The connected vehicle is the better vehicle!
 AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
CSE 352: Self-Driving Cars. Team 2: Randall Huang Youri Paul Raman Sinha Joseph Cullen
 CSE 352: Self-Driving Cars Team 2: Randall Huang Youri Paul Raman Sinha Joseph Cullen What are Self-Driving Cars A self-driving car, also called autonomous car and driverless car, is a vehicle that is
CSE 352: Self-Driving Cars Team 2: Randall Huang Youri Paul Raman Sinha Joseph Cullen What are Self-Driving Cars A self-driving car, also called autonomous car and driverless car, is a vehicle that is
Technical Paper Team Mojavaton Car # 1 DARPA Grand Challenge 2005
 Technical Paper Team Mojavaton Car # 1 DARPA Grand Challenge 2005 Team Members Karl Castleton Mike Claeys Dan Councilman Dave Crawford Jim Crittenden team leader Crag Frazier Paul Hallmann David Lafitte
Technical Paper Team Mojavaton Car # 1 DARPA Grand Challenge 2005 Team Members Karl Castleton Mike Claeys Dan Councilman Dave Crawford Jim Crittenden team leader Crag Frazier Paul Hallmann David Lafitte
Reinventing Urban Transportation and Mobility. Pascal Van Hentenryck University of Michigan Ann Arbor, MI
 Reinventing Urban Transportation and Mobility Pascal Van Hentenryck University of Michigan Ann Arbor, MI 1 Outline Motivation Technology enablers Some case studies The MIDAS Ritmo projet Conclusion 2 The
Reinventing Urban Transportation and Mobility Pascal Van Hentenryck University of Michigan Ann Arbor, MI 1 Outline Motivation Technology enablers Some case studies The MIDAS Ritmo projet Conclusion 2 The
ZF Advances Key Technologies for Automated Driving
 Page 1/5, January 9, 2017 ZF Advances Key Technologies for Automated Driving ZF s See Think Act supports self-driving cars and trucks ZF and NVIDIA provide computing power to bring artificial intelligence
Page 1/5, January 9, 2017 ZF Advances Key Technologies for Automated Driving ZF s See Think Act supports self-driving cars and trucks ZF and NVIDIA provide computing power to bring artificial intelligence
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
Our Approach to Automated Driving System Safety. February 2019
 Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
Design and Navigation of Flying Robots
 Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
1 On Time Performance
 MEMORANDUM: US 29 Travel Time & OTP To: From: Joana Conklin, Montgomery County DOT James A. Bunch, SWAI Subject: US 29 Travel Time and On Time Performance Analysis Date: This memorandum documents the US
MEMORANDUM: US 29 Travel Time & OTP To: From: Joana Conklin, Montgomery County DOT James A. Bunch, SWAI Subject: US 29 Travel Time and On Time Performance Analysis Date: This memorandum documents the US
The DARPA Grand Challenge: Ten Years Later
 I of6 1 0/?.?./?.014 ll 'i7 AM 2014/03/13 The DARPA Grand Challenge: Ten Years Later http://www.darpa.mil/newsevents/releases/2014/03/ 13.aspx The DARPA Grand Challenge: Ten Years Later March 13, 2014
I of6 1 0/?.?./?.014 ll 'i7 AM 2014/03/13 The DARPA Grand Challenge: Ten Years Later http://www.darpa.mil/newsevents/releases/2014/03/ 13.aspx The DARPA Grand Challenge: Ten Years Later March 13, 2014
Autonomous Vehicles: A look into the past - a look into the future
 Autonomous Vehicles: A look into the past - a look into the future Chester Wilmot, LTRC/LSU Presentation to the New Orleans Regional Planning Commission Freight Round Table 10/25/2017 THE PAST 1939 World
Autonomous Vehicles: A look into the past - a look into the future Chester Wilmot, LTRC/LSU Presentation to the New Orleans Regional Planning Commission Freight Round Table 10/25/2017 THE PAST 1939 World
Enabling Technologies for Autonomous Vehicles
 Enabling Technologies for Autonomous Vehicles Sanjiv Nanda, VP Technology Qualcomm Research August 2017 Qualcomm Research Teams in Seoul, Amsterdam, Bedminster NJ, Philadelphia and San Diego 2 Delivering
Enabling Technologies for Autonomous Vehicles Sanjiv Nanda, VP Technology Qualcomm Research August 2017 Qualcomm Research Teams in Seoul, Amsterdam, Bedminster NJ, Philadelphia and San Diego 2 Delivering
Highly Automated Driving: Fiction or Future?
 The future of driving. Final Event Highly Automated Driving: Fiction or Future? Prof. Dr. Jürgen Leohold Volkswagen Group Research Motivation The driver as the unpredictable factor: Human error is the
The future of driving. Final Event Highly Automated Driving: Fiction or Future? Prof. Dr. Jürgen Leohold Volkswagen Group Research Motivation The driver as the unpredictable factor: Human error is the
Content. Introduction. Technology. Type of unmanned vehicle. Past, Present, Future. Conclusion
 Introduction Content Technology Type of unmanned vehicle Past, Present, Future Conclusion What is unmanned vehicles? l Without a person on board l Remote controlled l Remote guided vehicles Reduce casualty
Introduction Content Technology Type of unmanned vehicle Past, Present, Future Conclusion What is unmanned vehicles? l Without a person on board l Remote controlled l Remote guided vehicles Reduce casualty
MOBILE MAPPING AND AUTONOMOUS VEHICLE NAVIGATION
 MOBILE MAPPING AND AUTONOMOUS VEHICLE NAVIGATION C. K. Toth a, E. Paska b a OSU, Center for Mapping, 1216 Kinnear Road, Columbus, OH 43212-1154, USA toth@cfm.ohio-state.edu b OSU, Department of Civil and
MOBILE MAPPING AND AUTONOMOUS VEHICLE NAVIGATION C. K. Toth a, E. Paska b a OSU, Center for Mapping, 1216 Kinnear Road, Columbus, OH 43212-1154, USA toth@cfm.ohio-state.edu b OSU, Department of Civil and
Engineering Dept. Highways & Transportation Engineering
 The University College of Applied Sciences UCAS Engineering Dept. Highways & Transportation Engineering (BENG 4326) Instructors: Dr. Y. R. Sarraj Chapter 4 Traffic Engineering Studies Reference: Traffic
The University College of Applied Sciences UCAS Engineering Dept. Highways & Transportation Engineering (BENG 4326) Instructors: Dr. Y. R. Sarraj Chapter 4 Traffic Engineering Studies Reference: Traffic
PATH TO SUCCESS: AN ANALYSIS OF 2016 INTELLIGENT GROUND VEHICLE COMPETITION (IGVC) AUTONOMOUS VEHICLE DESIGN AND IMPLEMENTATION
 AUTONOMOUS VEHICLE DESIGN AND IMPLEMENTATION") GVSETS 2016 PATH TO SUCCESS: AN ANALYSIS OF 2016 INTELLIGENT GROUND VEHICLE COMPETITION (IGVC) AUTONOMOUS VEHICLE DESIGN AND IMPLEMENTATION Andrew Kosinski US Army TARDEC Bernard Theisen 586-574-8750 bernard.theisens.army.mil
GVSETS 2016 PATH TO SUCCESS: AN ANALYSIS OF 2016 INTELLIGENT GROUND VEHICLE COMPETITION (IGVC) AUTONOMOUS VEHICLE DESIGN AND IMPLEMENTATION Andrew Kosinski US Army TARDEC Bernard Theisen 586-574-8750 bernard.theisens.army.mil
ISA Intimidator. July 6-8, Coronado Springs Resort Walt Disney World, Florida
 ISA Intimidator 10 th Annual Intelligent Ground Vehicle Competition July 6-8, 2002- Coronado Springs Resort Walt Disney World, Florida Faculty Advisor Contact Roy Pruett Bluefield State College 304-327-4037
ISA Intimidator 10 th Annual Intelligent Ground Vehicle Competition July 6-8, 2002- Coronado Springs Resort Walt Disney World, Florida Faculty Advisor Contact Roy Pruett Bluefield State College 304-327-4037
On the road to automated vehicles Sensors pave the way!
 On the road to automated vehicles Sensors pave the way! 26B connected devices 250M connected vehicles by 2020 Ottomatika http://www.cmu.edu/news/stories/archives/2015/august/spinoff-acquired.html
On the road to automated vehicles Sensors pave the way! 26B connected devices 250M connected vehicles by 2020 Ottomatika http://www.cmu.edu/news/stories/archives/2015/august/spinoff-acquired.html