Detailed Design Review
|
|
|
- Edward O’Connor’
- 5 years ago
- Views:
Transcription






1 Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III
2 Team 2
3 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed Design Mounting LiDAR Ultrasonics Emergency Stop Throttle Stock Mode Override Steering Control/Improvements Input/Output Layout Vehicle Simulation High-Level Software Block Diagram Mode Control Diagram Purchasing Plan Risk Assessment MSD II Preliminary Schedule 3
4 Background Rochester Institute of Technology is re-entering the field of autonomous vehicle research. Research and development of autonomous vehicles are becoming more and more popular in the automotive industry. It is believed that autonomous vehicles are the future for easy and efficient transportation that will make for safer, less congested roadways. Our project will follow the work completed by the Phase I and II teams. 4
5 Problem Statement Current State There have been two phases of this project so far. The first phase focused on modifying a golf cart into a remote controlled vehicle. The second phase is working on adding autonomous functionality to the APM in highly restricted settings Desired State APM is capable of localization, path planning, path following, and object avoidance. APM provides a simple human-machine interface which displays diagnostic information. Passengers have the ability to take control of the vehicle whether it is moving or stationary Project Goals APM can drive autonomously on a closed course while avoiding static and moving obstacles, staying on the designated path, and maintaining the safety of passengers and bystanders Constraints Phase II & CE Team accomplishments; budget; time for research; course characteristics 5
6 Project Scope Phase I Phase II & CE Team Phase III Remote control Manual override Remote subsystem functionality Basic path following (GMAP/SLAM) Electronics enclosure Touch screen mounting/basic GUI Mounting of LiDAR & sensors Object detection Algorithms to utilize LiDAR & ultrasonics Fully waterproofing electronics Path planning Basic user interface Emergency stop Redesign of main PCB 6
7 Customer Requirements Key Required functionality for completion Highly recommended functionality Preferred functionality Customer Rqmt. # Importance Description CR1 9 APM must, at a minimum, be able to operate within a closed course in autonomous mode CR2 9 APM must move forwards in autonomous mode CR3 9 APM must have intelligent vehicle control: driving CR4 9 APM must have intelligent vehicle control: steering CR5 9 APM must have intelligent vehicle control: braking CR6 3 APM must re-route path to avoid obstacle CR7 9 APM must be able to detect obstacles and brake CR8 3 APM must exhibit localization CR9 3 APM must have diagnostic data logging capability CR10 1 APM will have a display which will show it's location on a map, as well as diagnostic information CR11 9 APM destination must be input via Secure Shell Protocol (SSH) or remote desktop to the onboard PC CR12 9 APM must perform an emergency stop when a passenger hits the emergency stop button, or when the remote control device activates the emergency stop CR13 9 APM must have a way to switch between manual, remote, and autonomous modes CR14 9 APM must have a waterproof enclosure to protect computer and other electronics CR15 9 APM must have clear and accurate documentation on all aspects of cart along with their theoretical operations CR16 9 APM must have videos consisting of explanations of various subsystems CR17 9 APM must have schematics and wiring diagrams for all electrical modifications made to cart CR18 9 APM must have drawings of all mechanical modifications made to cart over the different phases 7
8 Engineering Requirements Rqmt. # F u n Engr. Requirement (metric) Unit of Measure Minimum Value Target Value Customer Requirement Comments/Status S1 Driving Modes (Manual, RC, Autonomous) Pass / Fail 1, 2, 13 S2 Steering Control Precision Degrees ± 2 ± 1 1, 3, 4 S3 Steering Position Encoding Degrees ± 2 ± 1 1, 3, 4, 7, 8 Governs steering accuracy through feedback S4 Speed Control Precision MPH ± 1 ± 0.5 1, 2, 3, 4, 5, 6, 7, 12 S5 Speed Encoding MPH ± 1 ± 0.5 1, 3, 4, 5, 6, 7, 12 Governs speed accuracy through feedback S6 Maximum Speed MPH 3 5 2, 3 S7 GPS Positioning Meters ± 5 ± , 6, 8, 10 Governs deviation between planned and actual course S8 Course: Arrive at planned destination Meters ± 5 ± 2.5 1, 2, 3, 4, 5, 8 Cart will stop within stated radius from destination S9 Course: Stop when moving obstacle moves in way Pass / Fail 1, 2, 5, 6, 7 More research needed to get more specific about size, speed, and distance S10 Detection of Light Reflecting 10" x 10" Objects Within 3 Meters Percentage ± , 6, degrees in front of car, 15 degrees vertical S11 Detection of Sound Reflecting 1' x 1' Objects Within 1 Meter Percentage ± , 6, degrees in front of car, 15 degrees vertical S12 Minimum Stopping Distance (from top speed without hitting obstacle) Meters 5 3 1, 3, 5, m/s^2 (0.30 G) & 4.8m/s^2 (0.49 G) average acceleration, respectively S13 SSH Interface with onboard PC Pass / Fail 9, 11 S14 Waterproof Enclosure for Electronics IPX- IPX3 IPX4 14 Will protect from splashing water from any direction S15 S16 Subsystem videos must be short and informative on how each subsytem works Minutes Mechanical drawings must be able to be given to machinists with the ability to reproduce the part with nothing other than the drawing Pass / Fail 18 Machine shop employees should be able to reproduce the part without any questions asked 8

9 Solid Models LiDAR Mounting Ultrasonics Study & Mounting 9


10 LiDAR Mount Design Inclination angle adjustable in 5 degree increments Aluminum construction LiDAR removable without tools Options to add lock and shroud for sensor Estimated Cost: $49.02 excluding nuts and screws See drawing for detailed information 10
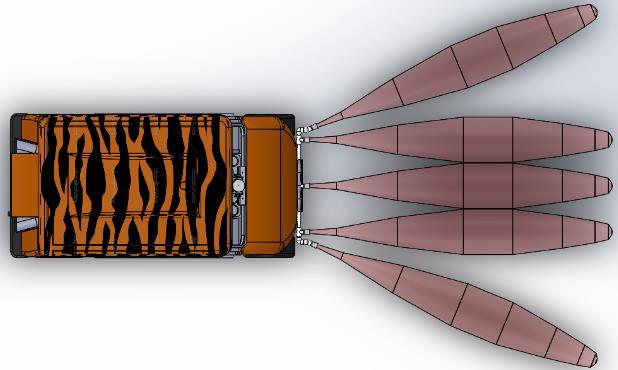
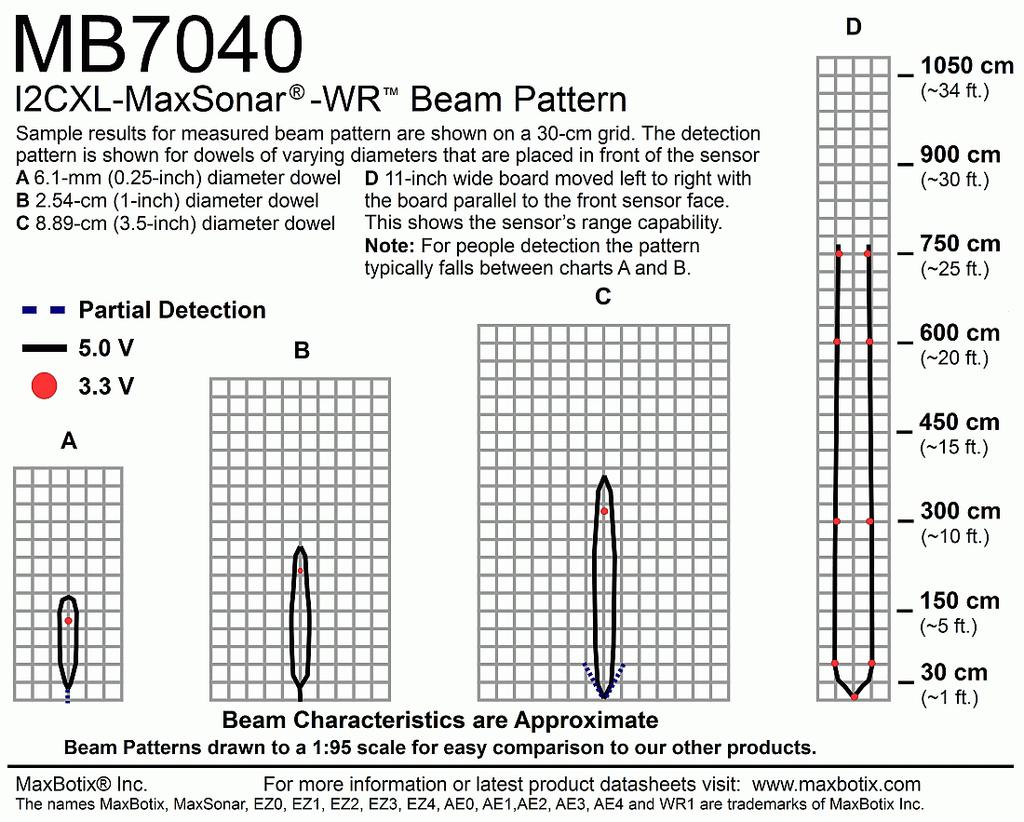
11 Ultrasonics Mounting Study 11

12 Ultrasonics Mounting 5 sonar sensors 2-3 existing MB7001 s 3-2 new MB7040 s Maxbotix MB7040: $99.95 each PVC Needed: 3 x ¾ SCH40 Pipe 5 x Tee fittings 2 x 90 Elbows 2 x 22.5 Elbows Estimated Cost: $10.05 See drawings for detailed information 12
 13")
13 Ultrasonics Mounting Summary 5 sonar sensors Possible addition of shorter range sensors Adjustable LiDAR mount Total Cost: $ (3 new sonars and mounts) 13

14 Future Mounting Tasks Stereo cameras Re-mounting of brake actuator to resolve interference Fully securing electronics enclosure Weatherproofing 14
15 Emergency Stop: Electrical 15

16 Emergency Stop: Electrical 16
17 Throttle Stock Mode Override 17
18 Steering Control Steering System Issues Requires 5V signal High pitch whining if driven by PWM Current design uses 2 DAC s for different steering signal Current design uses additional DAC for a reference voltage There are only 2 DACs per Arduino Due Possible Solutions Switch to Arduino Megas Improve level shifting circuit Benefits of improving the leveling shifting circuit Uses a DAC and not PWM Requires a single DAC instead of 3 Requires 1 Arduino instead of 2 PCB needs to be improved anyways 18
19 Proposed Steering Control Improvement Split output and use Op Amps to scale voltages Voltage subtractor and non-inverting configurations Converts a single output from V to a differential output from 0-5 V 19
20 One Arduino Layout: Inputs/Outputs 20
21 Vehicle Simulation Update Algorithm proceeds to next waypoint once cart location is within a specified proximity of current waypoint 21
22 High-Level Software Block Diagram 22
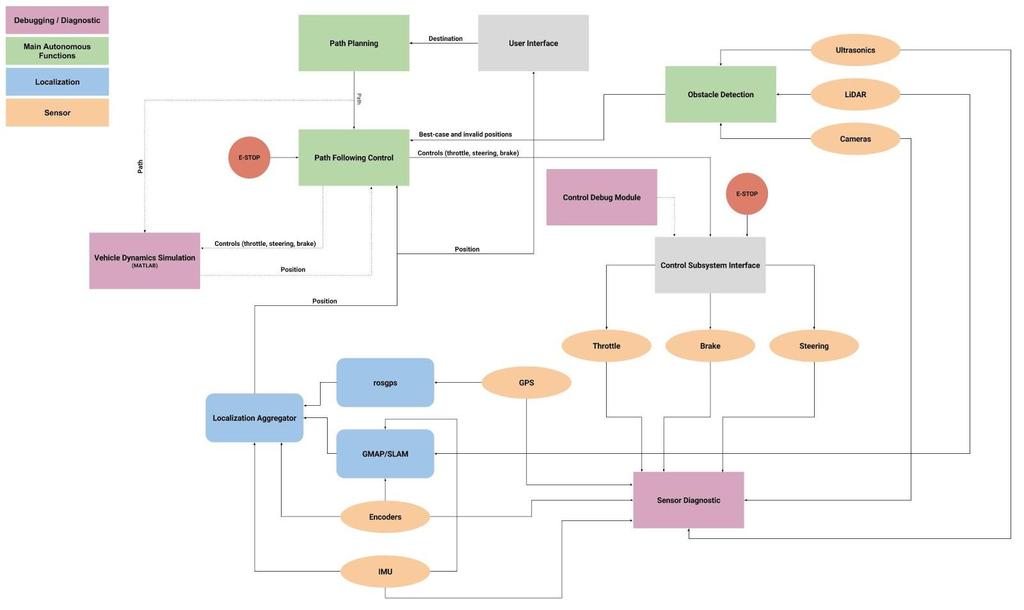
23 23

24 Mode Control Diagram 24
25 Purchasing Plan Purchasing Plan Vendor Description APM Relationship Part No Quantity Starting Budget $ Budget Remaining $ Date Purchased Date Recieved Amount Amazon GPS module GPS 1 22-Oct 28-Oct $35.00 Amazon GPS antenna GPS 1 22-Oct 28-Oct $9.50 OSH Park GPS PCB GPS 3 30-Nov $11.90 Automation Direct McMaster Carr PWR RELAY 40A DPDT 12VDC COIL OPEN STYLE PANEL MOUNT Emergency Stop AD-PR40-2C- 12D 1 $19.25 Plate / 5" Sqaure x 3/16" Thk. x 1/2" Tube LiDAR Mount 1 $21.30 N/A Vertical / Scrap (from Plate) LiDAR Mount 2 $0.00 N/A Bracket / Scrap (from Plate) LiDAR Mount 2 $0.00 McMaster Carr McMaster Carr 5/32" Pins / 5/32" x 1/2" 316 SS Dowel Pins (Pack of 5) LiDAR Mount 2 $8.00 Thumb Screw / 1/4-20 x 3/8" Plastic Rosette Head Thumb Screws (Pk of 10) LiDAR Mount 1 $10.38 Ultrasonics PVC piping and joints Ultrasonics Mount $10.04 Maxbotix MB7040 Ultrasonics 2-3 $ MSD Phase II's Remaining Budget /25/2016 $
26 Risk Assessment Key Low Ranked Risks Medium Ranked Risks High Ranked Risks ID Category Risk Item Likelihood Severity Importance 1 Not enough bandwidth to send all sensor information Control code error Not high enough resolution from sensors Unable to determine current location Sensor failure Sensor false reading Mechanical failure Electrical failure Power loss Integration trouble with steering and obstacle avoidance Technical 11 LiDAR does not integrate well with other systems PCB shorts out Touch screen loses input Touch screen stops displaying information GPS getting incorrect signal Erradict object can't be identified Control electronics overheat One of the three ultrasonics is unusable One of the arduinos blows while testing Not enough waypoints to reach user destination Need to buy additional sensors for all automation tasks Phase 2 does not meet all of their requirements Space for testing on campus is not available Not having enough time to learn from Phase II Resource Team loses a CE/programmer Team does not have enough budget to purchase a new GPS Team does not have enough resources to complete all software aspects Don't get redesigned main PCB back from D3 by set date Phase 2 does not complete all schematics for APM Enclosure costs more than budget

27 MSD II Preliminary Schedule 27
28 MSD II Preliminary Schedule 28
29 MSD II Preliminary Schedule V C V C V CV CV CV C V C V 29

30 MSD II Preliminary Schedule 30
31 Questions & Feedback
Problem Definition Review
 Problem Definition Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team Agenda Background Problem Statement Stakeholders Use Scenario Customer Requirements Engineering Requirements Preliminary Schedule
Problem Definition Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team Agenda Background Problem Statement Stakeholders Use Scenario Customer Requirements Engineering Requirements Preliminary Schedule
Autonomous People Mover P15241
 Autonomous People Mover P15241 Team Members: Nick Bovee, Pat Gelose, Katie Knowles, Due Lee, Keith Martin, Mollie Pressman, and Jonathan Zimmermann Project Guild: Dr. Rick Lux Project Customer: Dr. Raymond
Autonomous People Mover P15241 Team Members: Nick Bovee, Pat Gelose, Katie Knowles, Due Lee, Keith Martin, Mollie Pressman, and Jonathan Zimmermann Project Guild: Dr. Rick Lux Project Customer: Dr. Raymond
INTRODUCTION Team Composition Electrical System
 IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
Our Approach to Automated Driving System Safety. February 2019
 Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
Solar Powered Golf Cart
 Solar Powered Golf Cart Group 9 Jake Bettis Jacob Krueger Matt Roland Matt Tourtelot Project Description The main objective of this project is to design and build a solar-powered, energy efficient electric
Solar Powered Golf Cart Group 9 Jake Bettis Jacob Krueger Matt Roland Matt Tourtelot Project Description The main objective of this project is to design and build a solar-powered, energy efficient electric
P15044 Intelligent Mobility Cane
 P15044 Intelligent Mobility Cane Name Major Role Allan Andranikian ME Lead Engineer Andrew Greeley ME Vibrations Lead Ben Stewart EE Sensors Lead Dan Chianucci CE Controls Lead Justine Nichols IE Project
P15044 Intelligent Mobility Cane Name Major Role Allan Andranikian ME Lead Engineer Andrew Greeley ME Vibrations Lead Ben Stewart EE Sensors Lead Dan Chianucci CE Controls Lead Justine Nichols IE Project
Functional Algorithm for Automated Pedestrian Collision Avoidance System
 Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Items to specify: 4. Motor Speed Control. Head Unit. Radar. Steering Wheel Angle. ego vehicle speed control
 Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
Table of Contents. Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.
 Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.") March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
Initial Project and Group Identification Document. Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle)
") Initial Project and Group Identification Document Project Idea: Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle) Team Members: Robertson Augustine (Computer Engineer)
Initial Project and Group Identification Document Project Idea: Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle) Team Members: Robertson Augustine (Computer Engineer)
Rover Systems Rover Systems 02/29/04
 Rover Systems Rover Systems 02/29/04 ted@roversystems.com Disclaimer: The views, opinions, and/or findings contained in this paper are those of the participating team and should not be interpreted as representing
Rover Systems Rover Systems 02/29/04 ted@roversystems.com Disclaimer: The views, opinions, and/or findings contained in this paper are those of the participating team and should not be interpreted as representing
Deep Learning Will Make Truly Self-Driving Cars a Reality
 Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Cilantro. Old Dominion University. Team Members:
 Cilantro Old Dominion University Faculty Advisor: Dr. Lee Belfore Team Captain: Michael Micros lbelfore@odu.edu mmicr001@odu.edu Team Members: Ntiana Sakioti Matthew Phelps Christian Lurhakumbira nsaki001@odu.edu
Cilantro Old Dominion University Faculty Advisor: Dr. Lee Belfore Team Captain: Michael Micros lbelfore@odu.edu mmicr001@odu.edu Team Members: Ntiana Sakioti Matthew Phelps Christian Lurhakumbira nsaki001@odu.edu
GPS Robot Navigation Bi-Weekly Report 2/07/04-2/21/04. Chris Foley Kris Horn Richard Neil Pittman Michael Willis
 GPS Robot Navigation Bi-Weekly Report 2/07/04-2/21/04 Chris Foley Kris Horn Richard Neil Pittman Michael Willis GPS Robot Navigation Bi-Weekly Report 2/07/04-2/21/04 Goals for Two Week Period For the first
GPS Robot Navigation Bi-Weekly Report 2/07/04-2/21/04 Chris Foley Kris Horn Richard Neil Pittman Michael Willis GPS Robot Navigation Bi-Weekly Report 2/07/04-2/21/04 Goals for Two Week Period For the first
2015 The MathWorks, Inc. 1
 2015 The MathWorks, Inc. 1 [Subtrack 2] Vehicle Dynamics Blockset 소개 김종헌부장 2015 The MathWorks, Inc. 2 Agenda What is Vehicle Dynamics Blockset? How can I use it? 3 Agenda What is Vehicle Dynamics Blockset?
2015 The MathWorks, Inc. 1 [Subtrack 2] Vehicle Dynamics Blockset 소개 김종헌부장 2015 The MathWorks, Inc. 2 Agenda What is Vehicle Dynamics Blockset? How can I use it? 3 Agenda What is Vehicle Dynamics Blockset?
Unmanned Surface Vessels - Opportunities and Technology
 Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Autonomously Controlled Front Loader Senior Project Proposal
 Autonomously Controlled Front Loader Senior Project Proposal by Steven Koopman and Jerred Peterson Submitted to: Dr. Schertz, Dr. Anakwa EE 451 Senior Capstone Project December 13, 2007 Project Summary:
Autonomously Controlled Front Loader Senior Project Proposal by Steven Koopman and Jerred Peterson Submitted to: Dr. Schertz, Dr. Anakwa EE 451 Senior Capstone Project December 13, 2007 Project Summary:
Autonomous Ground Vehicle
 Autonomous Ground Vehicle Senior Design Project EE Anshul Tandon Brandon Nason Brian Aidoo Eric Leefe Advisors: ME Donald Lee Hardee Ivan Bolanos Wilfredo Caceres Mr. Bryan Audiffred Dr. Michael C. Murphy
Autonomous Ground Vehicle Senior Design Project EE Anshul Tandon Brandon Nason Brian Aidoo Eric Leefe Advisors: ME Donald Lee Hardee Ivan Bolanos Wilfredo Caceres Mr. Bryan Audiffred Dr. Michael C. Murphy
SIP-adus Field Operational Test
 Regional activities and FOTs SIP-adus Field Operational Test ー Mobility bringing everyone a smile ー Masato MINAKATA (TOYOTA MOTOR CORPORATION) SIP-adus International Cooperative WG 14 Nov. 2017 Goal of
Regional activities and FOTs SIP-adus Field Operational Test ー Mobility bringing everyone a smile ー Masato MINAKATA (TOYOTA MOTOR CORPORATION) SIP-adus International Cooperative WG 14 Nov. 2017 Goal of
Department of Electrical and Computer Science
 Department of Electrical and Computer Science Howard University Washington, DC 20059 EECE 401 & 402 Senior Design Final Report By Team AutoMoe Tavares Kidd @ 02744064 Lateef Adetona @02732398 Jordan Lafontant
Department of Electrical and Computer Science Howard University Washington, DC 20059 EECE 401 & 402 Senior Design Final Report By Team AutoMoe Tavares Kidd @ 02744064 Lateef Adetona @02732398 Jordan Lafontant
Autonomous Golf. Team 43 - Thomas Holcomb and William Peterson ECE 445 Project Proposal - Fall 2016 TA: Nicholas Ratajczyk
 Autonomous Golf Team 43 - Thomas Holcomb and William Peterson ECE 445 Project Proposal - Fall 2016 TA: Nicholas Ratajczyk 1. Introduction 1.1 Objective From a practical standpoint, the biggest obstacle
Autonomous Golf Team 43 - Thomas Holcomb and William Peterson ECE 445 Project Proposal - Fall 2016 TA: Nicholas Ratajczyk 1. Introduction 1.1 Objective From a practical standpoint, the biggest obstacle
Project Proposal for Autonomous Vehicle
 Project Proposal for Autonomous Vehicle Group Members: Ramona Cone Erin Cundiff Project Advisors: Dr. Huggins Dr. Irwin Mr. Schmidt 12/12/02 Project Summary The autonomous vehicle uses an EMAC based system
Project Proposal for Autonomous Vehicle Group Members: Ramona Cone Erin Cundiff Project Advisors: Dr. Huggins Dr. Irwin Mr. Schmidt 12/12/02 Project Summary The autonomous vehicle uses an EMAC based system
The Lug-n-Go. Team #16: Anika Manzo ( ammanzo2), Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018
, Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018") The Lug-n-Go Team #16: Anika Manzo ( ammanzo2), Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018 TA: Mickey Zhang Introduction 1.1 Problem Statement and Objective
The Lug-n-Go Team #16: Anika Manzo ( ammanzo2), Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018 TA: Mickey Zhang Introduction 1.1 Problem Statement and Objective
ISA Intimidator. July 6-8, Coronado Springs Resort Walt Disney World, Florida
 ISA Intimidator 10 th Annual Intelligent Ground Vehicle Competition July 6-8, 2002- Coronado Springs Resort Walt Disney World, Florida Faculty Advisor Contact Roy Pruett Bluefield State College 304-327-4037
ISA Intimidator 10 th Annual Intelligent Ground Vehicle Competition July 6-8, 2002- Coronado Springs Resort Walt Disney World, Florida Faculty Advisor Contact Roy Pruett Bluefield State College 304-327-4037
MEMS Sensors for automotive safety. Marc OSAJDA, NXP Semiconductors
 MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
e-nable Hand Test Rig
 enable Hand Test Rig P606 David Schwartz, Tia Parks, Shannon Barry, Samantha Mason, Charles Rumfola Agenda Recap Customer Requirements Engineering Requirements Effective Access Technology Conference Subsystems
enable Hand Test Rig P606 David Schwartz, Tia Parks, Shannon Barry, Samantha Mason, Charles Rumfola Agenda Recap Customer Requirements Engineering Requirements Effective Access Technology Conference Subsystems
ENGINEERING FOR HUMANS STPA ANALYSIS OF AN AUTOMATED PARKING SYSTEM
 ENGINEERING FOR HUMANS STPA ANALYSIS OF AN AUTOMATED PARKING SYSTEM Massachusetts Institute of Technology John Thomas Megan France General Motors Charles A. Green Mark A. Vernacchia Padma Sundaram Joseph
ENGINEERING FOR HUMANS STPA ANALYSIS OF AN AUTOMATED PARKING SYSTEM Massachusetts Institute of Technology John Thomas Megan France General Motors Charles A. Green Mark A. Vernacchia Padma Sundaram Joseph
Team P14029: McKibben Muscle Robotic Fish
 Team P14029: McKibben Muscle Robotic Fish Project Manager: Zachary Novak Mechanical Design Lead: John Chiu Lead Engineer: Seaver Wrisley Controls and Instrumentation Lead: Felix Liu AGENDA Project Goal
Team P14029: McKibben Muscle Robotic Fish Project Manager: Zachary Novak Mechanical Design Lead: John Chiu Lead Engineer: Seaver Wrisley Controls and Instrumentation Lead: Felix Liu AGENDA Project Goal
INSTALLATION & SERVICE GUIDE
 INSTALLATION & SERVICE GUIDE The Base6 Platinum series of arrow board have been designed with simplified installation and reliable service in mind. These arrow boards, as is the case with all arrow board,
INSTALLATION & SERVICE GUIDE The Base6 Platinum series of arrow board have been designed with simplified installation and reliable service in mind. These arrow boards, as is the case with all arrow board,
Robofish Charging Station (RCS) Test Plan
 Test Plan") Team P17250 10/26/2016 Rev A Robofish Charging Station (RCS) Test Plan 1 Table of Contents 1. Objectives 2. Test Criteria 3. Test Resources 4. Test Procedures 5. Results 6. Conclusions 1. Objectives 1.1.
Team P17250 10/26/2016 Rev A Robofish Charging Station (RCS) Test Plan 1 Table of Contents 1. Objectives 2. Test Criteria 3. Test Resources 4. Test Procedures 5. Results 6. Conclusions 1. Objectives 1.1.
UNIVERSITÉ DE MONCTON FACULTÉ D INGÉNIERIE. Moncton, NB, Canada PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY
 FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
Mercury VTOL suas Testing and Measurement Plan
 Mercury VTOL suas Testing and Measurement Plan Introduction Mercury is a small VTOL (Vertical Take-Off and Landing) aircraft that is building off of a quadrotor design. The end goal of the project is for
Mercury VTOL suas Testing and Measurement Plan Introduction Mercury is a small VTOL (Vertical Take-Off and Landing) aircraft that is building off of a quadrotor design. The end goal of the project is for
Software Requirements Specification (SRS) Active Park Assist
 Active Park Assist") Software Requirements Specification (SRS) Active Park Assist Authors: David Kircos, Neha Gupta, Derrick Dunville, Anthony Laurain, Shane McCloskey Customer: Eileen Davidson, Ford Motor Company Instructor:
Software Requirements Specification (SRS) Active Park Assist Authors: David Kircos, Neha Gupta, Derrick Dunville, Anthony Laurain, Shane McCloskey Customer: Eileen Davidson, Ford Motor Company Instructor:
Robofish Charging Station (RCS) Test Plan
 Test Plan") Team P17250 10/26/2016 Rev A Robofish Charging Station (RCS) Test Plan 1 Table of Contents 1. Objectives 2. Test Criteria 3. Test Resources 4. Test Procedures 5. Results 6. Conclusions 1. Objectives 1.1.
Team P17250 10/26/2016 Rev A Robofish Charging Station (RCS) Test Plan 1 Table of Contents 1. Objectives 2. Test Criteria 3. Test Resources 4. Test Procedures 5. Results 6. Conclusions 1. Objectives 1.1.
ECO BIKE TEST PLAN DOCUMENT
 Introduction: ECO BIKE TEST PLAN DOCUMENT Traffic jams have always been one of the major global issues, which can have negative impacts on the environment and the human. Nowadays, commuters have had a
Introduction: ECO BIKE TEST PLAN DOCUMENT Traffic jams have always been one of the major global issues, which can have negative impacts on the environment and the human. Nowadays, commuters have had a
STPA in Automotive Domain Advanced Tutorial
 www.uni-stuttgart.de The Second European STAMP Workshop 2014 STPA in Automotive Domain Advanced Tutorial Asim Abdulkhaleq, Ph.D Student Institute of Software Technology University of Stuttgart, Germany
www.uni-stuttgart.de The Second European STAMP Workshop 2014 STPA in Automotive Domain Advanced Tutorial Asim Abdulkhaleq, Ph.D Student Institute of Software Technology University of Stuttgart, Germany
Automated Driving is the declared goal of the automotive industry. Systems evolve from complicated to complex
 Automated Driving is the declared goal of the automotive industry Systems evolve from complicated to complex Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity
Automated Driving is the declared goal of the automotive industry Systems evolve from complicated to complex Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity
GCAT. University of Michigan-Dearborn
 GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
An Introduction to Automated Vehicles
 An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
Sabertooth A Hybrid AUV/ROV offshore system. Jan Siesjö Chief Engineer
 Sabertooth A Hybrid AUV/ROV offshore system Jan Siesjö Chief Engineer jan.siesjo@saabgroup.com SAAB WORLDWIDE Employees 2010 Sweden 10,372 South Africa 1,086 Australia 349 USA 194 Great Britain 117 Finland
Sabertooth A Hybrid AUV/ROV offshore system Jan Siesjö Chief Engineer jan.siesjo@saabgroup.com SAAB WORLDWIDE Employees 2010 Sweden 10,372 South Africa 1,086 Australia 349 USA 194 Great Britain 117 Finland
Test Plans & Test Results
 P10227 Variable Intake System for FSAE Race Car Test Plans & Test Results By: Dave Donohue, Dan Swank, Matt Smith, Kursten O'Neill, Tom Giuffre Table of contents 1. MSD I: WKS 8-10 PRELIMINARY TEST PLAN...
P10227 Variable Intake System for FSAE Race Car Test Plans & Test Results By: Dave Donohue, Dan Swank, Matt Smith, Kursten O'Neill, Tom Giuffre Table of contents 1. MSD I: WKS 8-10 PRELIMINARY TEST PLAN...
Dealing with customer concerns related to electronic throttle bodies By: Bernie Thompson
 Dealing with customer concerns related to electronic throttle bodies By: Bernie Thompson In order to regulate the power produced from the gasoline internal combustion engine (ICE), a restriction is used
Dealing with customer concerns related to electronic throttle bodies By: Bernie Thompson In order to regulate the power produced from the gasoline internal combustion engine (ICE), a restriction is used
Preliminary Design Report. Project Title: Lunabot
 EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 30 January 2012 Project Title: Lunabot Team Name: UF Lunabotics Team Members: Name: Matt Morgan Name: UF Lunabotics Team
EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 30 January 2012 Project Title: Lunabot Team Name: UF Lunabotics Team Members: Name: Matt Morgan Name: UF Lunabotics Team
Formation Flying Experiments on the Orion-Emerald Mission. Introduction
 Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
RIT Formula SAE Senior Design
 RIT Formula SAE Senior Design Agenda Project Description Work Breakdown Customer Needs Customer Specifications Current/Previous System Design Proposed Design #1 Proposed Design #2 Testing Plans Concept
RIT Formula SAE Senior Design Agenda Project Description Work Breakdown Customer Needs Customer Specifications Current/Previous System Design Proposed Design #1 Proposed Design #2 Testing Plans Concept
Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials. Ripley Valley Rural Fire Brigade - August 2010
 Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials Ripley Valley Rural Fire Brigade - August 2010 The Brigade offered to help evaluate the capabilities of an Unmanned Aerial Vehicle (UAV)
Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials Ripley Valley Rural Fire Brigade - August 2010 The Brigade offered to help evaluate the capabilities of an Unmanned Aerial Vehicle (UAV)
Low and medium voltage service. Power Care Customer Support Agreements
 Low and medium voltage service Power Care Customer Support Agreements Power Care Power Care is the best, most convenient and guaranteed way of ensuring electrification system availability and reliability.
Low and medium voltage service Power Care Customer Support Agreements Power Care Power Care is the best, most convenient and guaranteed way of ensuring electrification system availability and reliability.
High Level Design ElecTrek
 High Level Design ElecTrek EE Senior Design November 9, 2010 Katie Heinzen Kathryn Lentini Neal Venditto Nicole Wehner Table of Contents 1 Introduction...3 2 Problem Statement and Proposed Solution...3
High Level Design ElecTrek EE Senior Design November 9, 2010 Katie Heinzen Kathryn Lentini Neal Venditto Nicole Wehner Table of Contents 1 Introduction...3 2 Problem Statement and Proposed Solution...3
SimMotor User Manual Small Engine Simulator and HIL V COPY RIGHTS ECOTRONS LLC All rights reserved
 V2.3.1 SimMotor User Manual Small Engine Simulator and HIL V2.3.1 COPY RIGHTS ECOTRONS LLC All rights reserved Http://www.ecotrons.com Table of Contents Read before you start:...1 Why do I need SimMotor?...2
V2.3.1 SimMotor User Manual Small Engine Simulator and HIL V2.3.1 COPY RIGHTS ECOTRONS LLC All rights reserved Http://www.ecotrons.com Table of Contents Read before you start:...1 Why do I need SimMotor?...2
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Team 2228 CougarTech 1. Training L2. Electrical Design and Control System Wiring
 Team 2228 CougarTech 1 Training L2 Electrical Design and Control System Wiring Team 2228 CougarTech 2 Objectives Understand: Understand the electrical design process Understand the control system wiring
Team 2228 CougarTech 1 Training L2 Electrical Design and Control System Wiring Team 2228 CougarTech 2 Objectives Understand: Understand the electrical design process Understand the control system wiring
RB-Mel-03. SCITOS G5 Mobile Platform Complete Package
 RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
Rule-based Integration of Multiple Neural Networks Evolved Based on Cellular Automata
 1 Robotics Rule-based Integration of Multiple Neural Networks Evolved Based on Cellular Automata 2 Motivation Construction of mobile robot controller Evolving neural networks using genetic algorithm (Floreano,
1 Robotics Rule-based Integration of Multiple Neural Networks Evolved Based on Cellular Automata 2 Motivation Construction of mobile robot controller Evolving neural networks using genetic algorithm (Floreano,
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
RED RAVEN, THE LINKED-BOGIE PROTOTYPE. Ara Mekhtarian, Joseph Horvath, C.T. Lin. Department of Mechanical Engineering,
 RED RAVEN, THE LINKED-BOGIE PROTOTYPE Ara Mekhtarian, Joseph Horvath, C.T. Lin Department of Mechanical Engineering, California State University, Northridge California, USA Abstract RedRAVEN is a pioneered
RED RAVEN, THE LINKED-BOGIE PROTOTYPE Ara Mekhtarian, Joseph Horvath, C.T. Lin Department of Mechanical Engineering, California State University, Northridge California, USA Abstract RedRAVEN is a pioneered
iwheels 3 Lawrence Technological University
 5-15-2017 iwheels 3 Lawrence Technological University Team Captain: Devson Butani dbutani@ltu.edu Faculty Advisors: CJ Chung Jonathan Ruszala Gordon Stein Team Members: Sean Bleicher Kevin Cox Nirmit Changani
5-15-2017 iwheels 3 Lawrence Technological University Team Captain: Devson Butani dbutani@ltu.edu Faculty Advisors: CJ Chung Jonathan Ruszala Gordon Stein Team Members: Sean Bleicher Kevin Cox Nirmit Changani
Servo-pneumatic drive solution for welding guns. Top quality welding!
 Servo-pneumatic drive solution for welding guns Sturdy and precise! Top quality welding! Highlights Extremely short cycle times High quality and outstanding reproducibility of the spot welds Excellent
Servo-pneumatic drive solution for welding guns Sturdy and precise! Top quality welding! Highlights Extremely short cycle times High quality and outstanding reproducibility of the spot welds Excellent
Overview of operation modes
 Overview of operation modes There are three main operation modes available. Any of the modes can be selected at any time. The three main modes are: manual, automatic and mappable modes 1 to 4. The MapDCCD
Overview of operation modes There are three main operation modes available. Any of the modes can be selected at any time. The three main modes are: manual, automatic and mappable modes 1 to 4. The MapDCCD
EEL Project Design Report: Automated Rev Matcher. January 28 th, 2008
 Brad Atherton, masscles@ufl.edu, 352.262.7006 Monique Mennis, moniki@ufl.edu, 305.215.2330 EEL 4914 Project Design Report: Automated Rev Matcher January 28 th, 2008 Project Abstract Our device will minimize
Brad Atherton, masscles@ufl.edu, 352.262.7006 Monique Mennis, moniki@ufl.edu, 305.215.2330 EEL 4914 Project Design Report: Automated Rev Matcher January 28 th, 2008 Project Abstract Our device will minimize
Oakland University Presents:
 Oakland University Presents: I certify that the engineering design present in this vehicle is significant and equivalent to work that would satisfy the requirements of a senior design or graduate project
Oakland University Presents: I certify that the engineering design present in this vehicle is significant and equivalent to work that would satisfy the requirements of a senior design or graduate project
AEB IWG 02. ISO Standard: FVCMS. I received the following explanation from the FVCMS author:
 ISO Standard: FVCMS I received the following explanation from the FVCMS author: The intent behind SRB was to potentially draw the driver s attention to hazards ahead of the SV before MB was enacted but
ISO Standard: FVCMS I received the following explanation from the FVCMS author: The intent behind SRB was to potentially draw the driver s attention to hazards ahead of the SV before MB was enacted but
Ram Racing CSU Formula SAE
 Ram Racing 2016 CSU Formula SAE Background/History Colligate Electric Racecar design competition Ram Racing was established in 1996 2 nd iteration of Formula SAE Electric Competition Static events Design
Ram Racing 2016 CSU Formula SAE Background/History Colligate Electric Racecar design competition Ram Racing was established in 1996 2 nd iteration of Formula SAE Electric Competition Static events Design
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE. CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development
 AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
Explanation 1 Input External Switch 2 Input Hipot Safety Switch
 on the 1100H+ The 1100H+ has capability, which allows you to set up the tester to control external devices with tester functions. You can also use an input on the tester to start a test. For example, the
on the 1100H+ The 1100H+ has capability, which allows you to set up the tester to control external devices with tester functions. You can also use an input on the tester to start a test. For example, the
Homework 3: Design Constraint Analysis and Component Selection Rationale
 Homework 3: Design Constraint Analysis and Component Selection Rationale Team Code Name: ATV (Autonomous Targeting Vehicle Group No. 3 Team Member Completing This Homework: Daniel Barrett E-mail Address
Homework 3: Design Constraint Analysis and Component Selection Rationale Team Code Name: ATV (Autonomous Targeting Vehicle Group No. 3 Team Member Completing This Homework: Daniel Barrett E-mail Address
CSE 352: Self-Driving Cars. Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark
 CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
Heat Shield Design Project
 Name Class Period Heat Shield Design Project The heat shield is such a critical piece, not just for the Orion mission, but for our plans to send humans into deep space. Final Points Earned Class Participation/Effort
Name Class Period Heat Shield Design Project The heat shield is such a critical piece, not just for the Orion mission, but for our plans to send humans into deep space. Final Points Earned Class Participation/Effort
Team Siemens. Microplate Loading System. Left to Right: Paul Masullo, Maxime Dempah, Leah Putman, Daniel Russakow, Daniel McCarthy
 Team Siemens Microplate Loading System Left to Right: Paul Masullo, Maxime Dempah, Leah Putman, Daniel Russakow, Daniel McCarthy Department of Mechanical Engineering Outline Introduction 1. About the Project
Team Siemens Microplate Loading System Left to Right: Paul Masullo, Maxime Dempah, Leah Putman, Daniel Russakow, Daniel McCarthy Department of Mechanical Engineering Outline Introduction 1. About the Project
Project Narrative Description
 0 Project Narrative Description Charge Spot is intended to demonstrate the feasibility of an autonomous electric vehicle charging system for residential use. The goal of Charge Spot is to have no user
0 Project Narrative Description Charge Spot is intended to demonstrate the feasibility of an autonomous electric vehicle charging system for residential use. The goal of Charge Spot is to have no user
Understanding the benefits of using a digital valve controller. Mark Buzzell Business Manager, Metso Flow Control
 Understanding the benefits of using a digital valve controller Mark Buzzell Business Manager, Metso Flow Control Evolution of Valve Positioners Digital (Next Generation) Digital (First Generation) Analog
Understanding the benefits of using a digital valve controller Mark Buzzell Business Manager, Metso Flow Control Evolution of Valve Positioners Digital (Next Generation) Digital (First Generation) Analog
AND CHANGES IN URBAN MOBILITY PATTERNS
 TECHNOLOGY-ENABLED MOBILITY: Virtual TEsting of Autonomous Vehicles AND CHANGES IN URBAN MOBILITY PATTERNS Technology-Enabled Mobility In the era of the digital revolution everything is inter-connected.
TECHNOLOGY-ENABLED MOBILITY: Virtual TEsting of Autonomous Vehicles AND CHANGES IN URBAN MOBILITY PATTERNS Technology-Enabled Mobility In the era of the digital revolution everything is inter-connected.
Protection & Control / Commissioning Engineer
 Protection & Control / Commissioning Engineer Are you ready to be a technology pioneer? Oil and gas factories 3000 meters underwater, heavy locomotive traction motors, electric vehicle chargers that deliver
Protection & Control / Commissioning Engineer Are you ready to be a technology pioneer? Oil and gas factories 3000 meters underwater, heavy locomotive traction motors, electric vehicle chargers that deliver
ShapeAccelArray (SAAF) Model 003
 Model 003") The ShapeAccelArray Field (SAAF) is a type of SAA that is most commonly used. All SAA types have rigid segments separated by flexible joints. Triaxial MEMS gravity sensors measure tilt in each individual
The ShapeAccelArray Field (SAAF) is a type of SAA that is most commonly used. All SAA types have rigid segments separated by flexible joints. Triaxial MEMS gravity sensors measure tilt in each individual
SUMMARY: DETAIL DESIGN REVIEW
 March 2, 2015 [Type here] - 1 - SUMMARY: DETAIL DESIGN REVIEW Biodiesel Reactor Improvements University of Idaho Team Liquid Gold Meeting: BAE Conference Room, 3:30, 02/26/2015 Present: Jon Van Gerpen,
March 2, 2015 [Type here] - 1 - SUMMARY: DETAIL DESIGN REVIEW Biodiesel Reactor Improvements University of Idaho Team Liquid Gold Meeting: BAE Conference Room, 3:30, 02/26/2015 Present: Jon Van Gerpen,
Linear Flexible Joint Cart Plus Single Inverted Pendulum (LFJC+SIP)
") Linear Motion Servo Plants: IP01 and IP02 Linear Flexible Joint Cart Plus Single Inverted Pendulum (LFJC+SIP) User Manual Table of Contents 1. Linear Flexible Joint Cart Plus Single Inverted Pendulum System
Linear Motion Servo Plants: IP01 and IP02 Linear Flexible Joint Cart Plus Single Inverted Pendulum (LFJC+SIP) User Manual Table of Contents 1. Linear Flexible Joint Cart Plus Single Inverted Pendulum System
Automotive Electronics/Connectivity/IoT/Smart City Track
 Automotive Electronics/Connectivity/IoT/Smart City Track The Automobile Electronics Sessions explore and investigate the ever-growing world of automobile electronics that affect virtually every aspect
Automotive Electronics/Connectivity/IoT/Smart City Track The Automobile Electronics Sessions explore and investigate the ever-growing world of automobile electronics that affect virtually every aspect
Compatibility of STPA with GM System Safety Engineering Process. Padma Sundaram Dave Hartfelder
 Compatibility of STPA with GM System Safety Engineering Process Padma Sundaram Dave Hartfelder Table of Contents Introduction GM System Safety Engineering Process Overview Experience with STPA Evaluation
Compatibility of STPA with GM System Safety Engineering Process Padma Sundaram Dave Hartfelder Table of Contents Introduction GM System Safety Engineering Process Overview Experience with STPA Evaluation
Control of Mobile Robots
 Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
University of New Hampshire: FSAE ECE Progress Report
 University of New Hampshire: FSAE ECE Progress Report Team Members: Christopher P. Loo & Joshua L. Moran Faculty Advisor: Francis C. Hludik, Jr., M.S. Courses Involved: ECE 541, ECE 543, ECE 562, ECE 633,
University of New Hampshire: FSAE ECE Progress Report Team Members: Christopher P. Loo & Joshua L. Moran Faculty Advisor: Francis C. Hludik, Jr., M.S. Courses Involved: ECE 541, ECE 543, ECE 562, ECE 633,
Unidrive M600 High performance drive for induction and sensorless permanent magnet motors
 Unidrive M600 High performance drive for induction and sensorless permanent magnet motors 0.75 kw - 2.8 MW Heavy Duty (1.0 hp - 4,200 hp) 200 V 400 V 575 V 690 V Unidrive M600 features Easy click-in keypad
Unidrive M600 High performance drive for induction and sensorless permanent magnet motors 0.75 kw - 2.8 MW Heavy Duty (1.0 hp - 4,200 hp) 200 V 400 V 575 V 690 V Unidrive M600 features Easy click-in keypad
WHITE PAPER Autonomous Driving A Bird s Eye View
 WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
Successful Deployment of ecall Live Crash Test
 Successful Deployment of ecall Live Crash Test There is a growing necessity to conform to automotive safety regulations for emergency calls (ecalls). One popular car maker wanted to push its safety standards
Successful Deployment of ecall Live Crash Test There is a growing necessity to conform to automotive safety regulations for emergency calls (ecalls). One popular car maker wanted to push its safety standards
Red Team. DARPA Grand Challenge Technical Paper. Revision: 6.1 Submitted for Public Release. April 8, 2004
 Red Team DARPA Grand Challenge Technical Paper Revision: 6.1 Submitted for Public Release April 8, 2004 Team Leader: William Red L. Whittaker Email address: red@ri.cmu.edu Mailing address: Carnegie Mellon
Red Team DARPA Grand Challenge Technical Paper Revision: 6.1 Submitted for Public Release April 8, 2004 Team Leader: William Red L. Whittaker Email address: red@ri.cmu.edu Mailing address: Carnegie Mellon
GM-TARDEC Autonomous Safety Collaboration Meeting
 GM-TARDEC Autonomous Safety Collaboration Meeting January 13, 2010 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information is estimated to average
GM-TARDEC Autonomous Safety Collaboration Meeting January 13, 2010 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information is estimated to average
Steering Actuator for Autonomous Driving and Platooning *1
 TECHNICAL PAPER Steering Actuator for Autonomous Driving and Platooning *1 A. ISHIHARA Y. KUROUMARU M. NAKA The New Energy and Industrial Technology Development Organization (NEDO) is running a "Development
TECHNICAL PAPER Steering Actuator for Autonomous Driving and Platooning *1 A. ISHIHARA Y. KUROUMARU M. NAKA The New Energy and Industrial Technology Development Organization (NEDO) is running a "Development
BY HOEYCOMB AEROSPACE TECHNOLOGIES. HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV
 BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
Objective Testing of Autonomous Emergency Braking Systems for the EuroNCAP AEB rating
 controlling tomorrow s vehicles Objective Testing of Autonomous Emergency Braking Systems for the EuroNCAP AEB rating VEHICO GmbH Büchnerstr. 6 38118 Braunschweig (Germany) 0531-20835 - 110 www.vehico.com
controlling tomorrow s vehicles Objective Testing of Autonomous Emergency Braking Systems for the EuroNCAP AEB rating VEHICO GmbH Büchnerstr. 6 38118 Braunschweig (Germany) 0531-20835 - 110 www.vehico.com
UNCLASSIFIED R-1 ITEM NOMENCLATURE
 Exhibit R-2, RDT&E Budget Item Justification: PB 213 Navy DATE: February 212 COST ($ in Millions) FY 211 FY 212 FY 214 FY 215 FY 216 FY 217 To Program Element 67.48 18.248 99.6-99.6 49.2 12.2 13.4 -. 349.696
Exhibit R-2, RDT&E Budget Item Justification: PB 213 Navy DATE: February 212 COST ($ in Millions) FY 211 FY 212 FY 214 FY 215 FY 216 FY 217 To Program Element 67.48 18.248 99.6-99.6 49.2 12.2 13.4 -. 349.696
Content. Introduction. Technology. Type of unmanned vehicle. Past, Present, Future. Conclusion
 Introduction Content Technology Type of unmanned vehicle Past, Present, Future Conclusion What is unmanned vehicles? l Without a person on board l Remote controlled l Remote guided vehicles Reduce casualty
Introduction Content Technology Type of unmanned vehicle Past, Present, Future Conclusion What is unmanned vehicles? l Without a person on board l Remote controlled l Remote guided vehicles Reduce casualty
N.J.A.V. (New Jersey Autonomous Vehicle) 2013 Intelligent Ground Vehicle Competition
 2013 Intelligent Ground Vehicle Competition") N.J.A.V. (New Jersey Autonomous Vehicle) 2013 Intelligent Ground Vehicle Competition Department of Mechanical Engineering The College of New Jersey Ewing, New Jersey Team Members: Michael Bauer, Christopher
N.J.A.V. (New Jersey Autonomous Vehicle) 2013 Intelligent Ground Vehicle Competition Department of Mechanical Engineering The College of New Jersey Ewing, New Jersey Team Members: Michael Bauer, Christopher
RailPro DCC User Manual
 RailPro DCC User Manual User Manual (219) 322-0279 www.ringengineering.com Revision 1.01 Copyright 2017 All rights reserved Table of Contents Introduction...2 STEP 1 - Install a RailPro Module into a Locomotive...3
RailPro DCC User Manual User Manual (219) 322-0279 www.ringengineering.com Revision 1.01 Copyright 2017 All rights reserved Table of Contents Introduction...2 STEP 1 - Install a RailPro Module into a Locomotive...3
SUMMER PROJECT ROBOTICS CLUB, IIT KANPUR
 SUMMER PROJECT ROBOTICS CLUB, IIT KANPUR 2013 AUTONOMOUS UNDERWATER VEHICLE Mentor - Dhrupal R. Shah Hall-10 Mob:-8765696060 Members Prakhar Jain Hall-5 Mob:-9807885652 Pranav Vyas Hall-3 Mob:-9695796655
SUMMER PROJECT ROBOTICS CLUB, IIT KANPUR 2013 AUTONOMOUS UNDERWATER VEHICLE Mentor - Dhrupal R. Shah Hall-10 Mob:-8765696060 Members Prakhar Jain Hall-5 Mob:-9807885652 Pranav Vyas Hall-3 Mob:-9695796655
 1 Network based Motion Control A maximum of 16 axes can be operated from a PC through RS- 485 communication. All of the Motion conditions are set through network and saved Flash ROM as a parameter. Motion
1 Network based Motion Control A maximum of 16 axes can be operated from a PC through RS- 485 communication. All of the Motion conditions are set through network and saved Flash ROM as a parameter. Motion
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF
 AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
Palos Verdes High School 1
 Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
Related products: SAA232, SAA232-5, SAA Field Power Unit, SAAUSB
 SAAF Model 003 The ShapeAccelArray Field (SAAF) is a type of SAA that is most commonly used. All SAA types have rigid segments separated by flexible joints. Triaxial MEMS gravity sensors measure tilt in
SAAF Model 003 The ShapeAccelArray Field (SAAF) is a type of SAA that is most commonly used. All SAA types have rigid segments separated by flexible joints. Triaxial MEMS gravity sensors measure tilt in
Intelligent Transportation Systems. Secure solutions for smart roads and connected highways. Brochure Intelligent Transportation Systems
 Intelligent Transportation Systems Secure solutions for smart roads and connected highways Secure solutions for smart roads and connected highways Today s technology is delivering new opportunities for
Intelligent Transportation Systems Secure solutions for smart roads and connected highways Secure solutions for smart roads and connected highways Today s technology is delivering new opportunities for
Technical Review Agenda
 KGCOE MSD Technical Review Agenda P13261: Electric Motorcycle Powertrain Development Meeting Purpose: 1. To give the customers a better idea of what we had in mind for the scope of the project. 2. To confirm
KGCOE MSD Technical Review Agenda P13261: Electric Motorcycle Powertrain Development Meeting Purpose: 1. To give the customers a better idea of what we had in mind for the scope of the project. 2. To confirm
ZEPHYR FAQ. Table of Contents
 Table of Contents General Information What is Zephyr? What is Telematics? Will you be tracking customer vehicle use? What precautions have Modus taken to prevent hacking into the in-car device? Is there
Table of Contents General Information What is Zephyr? What is Telematics? Will you be tracking customer vehicle use? What precautions have Modus taken to prevent hacking into the in-car device? Is there