The Lug-n-Go. Team #16: Anika Manzo ( ammanzo2), Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018
|
|
|
- Darcy Day
- 5 years ago
- Views:
Transcription
1 The Lug-n-Go Team #16: Anika Manzo ( ammanzo2), Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018 TA: Mickey Zhang
2 Introduction 1.1 Problem Statement and Objective Traditional luggages are outdated. Though recent material improvements have made them lighter and stronger, these luggages fail to fit into our modern world. The world we live in today is driven by convenience. According a survey conducted by Pew Research Center in late 2016, more than 75% of Americans own a smartphone [1]. The versatility of these handheld computers have made tremendous improvements to the general quality of life, which makes them a staple in everyday living. This is where traditional luggages fall short; other than holding your belongings, they offer no other improvement to the aspects of traveling. Our goal is to modernize the carry-on luggage to conform to today s technologically-advanced world. This luggage will be automated to follow the owner and avoid obstacles so that he or she does not have to lug around a fully-packed bag that can weigh up to 40 pounds. We also want to add a USB charging port because finding an open outlet or charging station is nearly impossible at an airport. Our design will incorporate these concepts into a reliable and affordable package that abides to TSA regulations on size, weight, and batteries. 1.2 Background According to the International Air Transport Association, on average, over 8 million people travel by airplane every day [2]. Most of these people travel with some sort of luggage that they are forced to carry or wheel themselves. This is a common problem that many travelers face but can be solved by adding technology to the average luggage. Two companies have identified this problem and come up with their own solutions. In 2017, Travelmate Robotics created an autonomous suitcase similar to the one we are proposing. This product is packed with other features including suitcase tracking, multicolored LED lighting, and an electronic lock. Starting at $1099, it is not a likely for option many travellers. Where the Travelmate also falls short is its lack of an easily removable battery. As TSA regulations get more strict (ie. battery sizes and connections), existing smart luggage systems are becoming less viable alternatives. The COWAROBOT R1 is another autonomous luggage with similar features, but where it stands out is its removable battery pack, which makes it much more TSA-friendly. Still, at a staggering $699, it is not easily attainable by general consumers. Perhaps the biggest issue with these products is that their promotional videos fail to demonstrate the obstacle-avoidance capabilities. They showcase the luggages in conveniently open and low-traffic environments, which does not simulate a natural airport setting. Our project aims to solve the problems where these existing products fail.

3 1.3 High-level Requirements Luggage must avoid obstacles within 4 feet of its direct path and accurately follow the user while traveling at a maximum speed of 6 MPH and supporting a maximum weight of 40 pounds. Luggage must have a USB charging dock capable of charging a cellphone by providing 5V and 0.5A for up to one hour. Luggage must be as low cost as possible and follow all TSA rules and regulations. Design Block Diagram This block diagram lays out the basic idea of how each of the components in our project will interact with each other. The red lines represent the power lines and the black lines represent basic wire connections. The descriptions behind each of the modules in this block diagram can be found below.


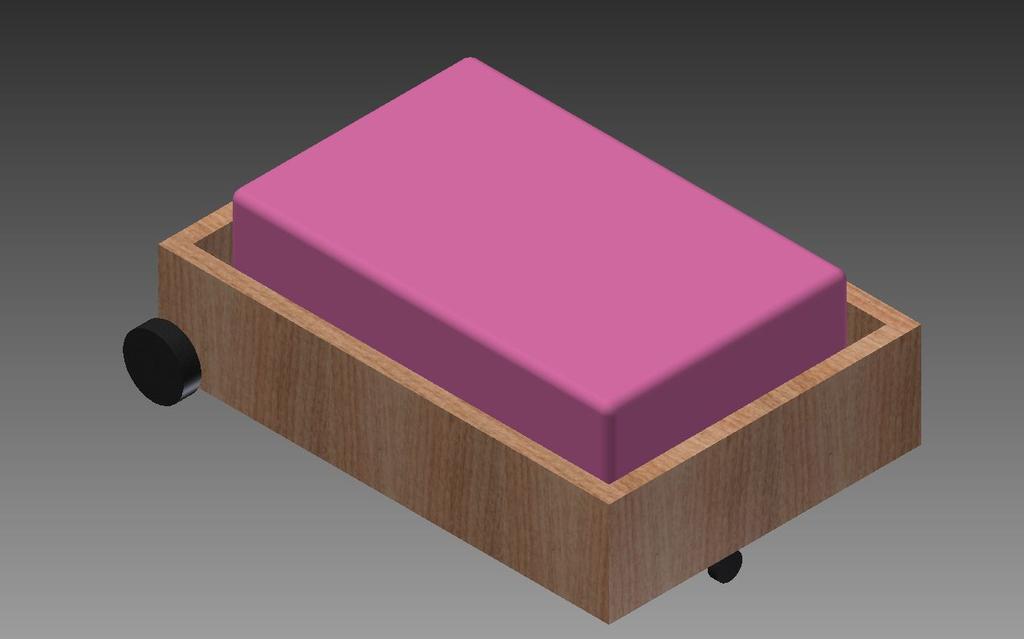
4 Physical Diagram The physical design of our project involves an autonomous platform that the suitcase will snuggly lay horizontally on. There will be two large wheels in the front that will be controlled by the motors and a smaller swivel wheel in the back that will be used as support. The material itself will be a lightweight, strong wood that we can obtain from the machine shop, along with the construction of the entire design itself. The following images are multiple views of the design.

5
6 2.1 Power Supply A reliable power supply is required for most components in our design. A lithium ion battery will be used as the main power supply. Two voltage regulators will be designed to step voltage down to the appropriate amount based on component requirements Lithium Ion Battery An 18.5V, 3000mAh Lithium Polymer battery will be used as the main power source in our design. The battery placement will be designed such that it can be easily removed by the user. This battery is within the maximum voltage and power ratings of the Transportation Security Administration (TSA). Requirement #1: The battery must meet TSA rules and requirements Voltage Regulator #1 The first voltage regulator will step the 18.5V power source down to 12V. This will then be used to power the motor control and drive system. Requirement #1: Voltage Regulator #1 must provide 12V +/- 5% from an 18.5V source Voltage Regulator #2 The second voltage regulator will step the 12V down to 5V. The 5V supplied by this regulator will be used to power the microcontroller, obstacle sensor, GPS Module, and Compass. This regulator must be capable of handling a maximum voltage of 12.6V. Requirement #1: Voltage Regulator #2 must provide 5V +/- 5% from an V source Control Unit The control unit is responsible for initializing and managing data for each sensor and module Microcontroller The ATmega328P will be used as the microcontroller in our design. It will be responsible for controlling each sensor, reading the data from the sensor, and sending signals to the motor drive unit based on the data. Requirement #1: The ATmega328P must be integrated into our final PCB design. Requirement #2: The ATmega328P must request and process data from the obstacle sensor every two seconds. Requirement #3: The ATmega328P must request and process data from the GPS and compass module every two seconds. Requirement #4: The ATmega328P must send signals to the motor drive and control unit based on the sensor information.
7 2.2.2 Obstacle Sensor A long range infrared proximity sensor (Pololu sds02a ) will be used to detect any upcoming obstacles in the luggage s path. Two sensors will be used, one for each front motor. The response of the sensor will control speed of the motor. Requirement #1: The sensor must accurately detect obstacles within 4 feet of its direct path GPS Module A high precision GPS module (FW5632) will be used so that we can map the luggage to the users location. This will be connected to the microcontroller and further programmed to work with the users app. Requirement #1: The GPS Module must accurately log the time, data, longitude, and latitude of the user every 2 seconds Compass A compass (SEN-12916) will be used so that the luggage knows what direction it is heading. Requirement #1: The Compass must accurately log the location of the luggage Bluetooth Module A bluetooth module (RN-41) will be used to connect to the user s cellphone. Through bluetooth connection, the luggage will be able to track the user s location and accurately follow the user. Requirement #1: The bluetooth module must maintain a stable connection to the user s phone within a 5ft x 5ft range. 2.3 Motor Drive and Control Unit This unit will be responsible for driving and controlling the two motors. The Motor Drive and Control Unit will consist of two H-Bridge circuits and two adjustable pulse width modulation (PWM) signals, one for each motor. The H-Bridge circuit will allow the motor to change direction by reversing the polarity. The PWM signal will control the speed of the motor based on the signal sent from the microcontroller. By controlling the speed of each motor, the luggage will be able to adjust its direction to avoid obstacles or continue following its user. Requirement #1: The Motor Drive and Control Unit must provide a maximum of 12V to each motor. Requirement #2: The Motor Drive and Control Unit must include safety features such as a current limiter to prevent damage from large current spikes if either of the motors stall.
8 2.4 Motors Our design will use two 12V, 1500 RPM DC high torque motors. One motor will be used to drive the left front wheel and the second motor will be used to drive the right front wheel. Requirement #1: The motors must be provide enough torque to move the luggage when at a maximum weight of 40 pounds. Requirement #2: The motors must be capable of moving the luggage at a maximum speed of 6 mph. 2.5 USB Charging Dock A USB Charging Dock will be designed to allow the user to charge a cellphone. This charging dock will provide 5V and 0.5A to charge a cellphone. Requirement #1: The USB Charging dock must provide 5V +/- 5% and 0.5A from an V source for up to one hour. 2.6 Risk Analysis The ability to accurately avoid obstacles and follow the user will be the most challenging aspect of this design and creates a great risk in completing this project. The luggage must search for obstacles, redirect itself to avoid obstacles, locate the user, and redirect itself to follow the user. This process must be repeated until the user has arrived at the final destination. This process should be done quickly, efficiently, and accurately. These requirements. will be challenging to meet because they rely heavily on the functionality of other modules and can be impacted by other unknown variables. In order for the luggage to avoid obstacles, the obstacle sensor must be fully functional. In order for the luggage the follow the user, the GPS, bluetooth, and compass modules must be fully working without any interference. Both of these tasks rely heavily on the motor drive and control unit to properly maneuver the luggage. To ensure that this challenging feature of our design is completed, we will work on each module of our design individually and make certain that each module is fully functional before we integrate each module together. This will help in the debugging process if a problem were to arise. A long range obstacle detection sensor will be used to detect obstacles from further away and increase the available time for the motors to adjust. We will also use a long range and reliable bluetooth module to ensure connection is not lost in the event that the luggage gets stuck and must contact the user. Safety and Ethics There are various potential safety hazards in the design of this project that must be carefully addressed to ensure complete safety when designing this product. Firstly, our design uses a Lithium-Ion Polymer battery which is capable of causing a fire or exploding when used improperly [3]. To avoid potential safety hazards, we will test all modules of this design to
9 ensure they are all working properly before using the lithium ion battery as the main source of power. Suitcases are used in various environments and weather conditions. Rain and snow can cause damage to the internal electronics and wiring of our design. All wiring and circuitry will be safely covered to keep the design dry and safe in various weather conditions. Along with following IEEE standards, we must ensure that our design follows TSA rules and regulations. According to Business Insider, starting in 2018, smart luggages will only be allowed on flights if the battery is removed [4]. To abide by this new rule, our design allow the battery to be easily and safely removed by the user. We must also ensure that our lithium ion battery is within the 100Wh TSA limit for a carry on bag. Overall, our design will strive to follow the IEEE Code of Ethics, #1, To hold paramount the safety, health, and welfare of the public [5]. Our final product will be safe for the public, follow all TSA rules, and capable of withstanding various weather conditions. Our goal is to provide an innovative product without compromising the safety, health, and welfare of the public.
10 References [1] Pew Research Center: Internet, Science & Tech, Mobile Fact Sheet, [Online]. Available at: [Accessed 8 Feb. 2018]. [2] Iata.org, IATA - New Year s Day 2014 marks 100 Years of Commercial Aviation, [Online]. Available at: [Accessed 8 Feb. 2018]. [3] Batteryuniversity.com, Safety Concerns with Li-ion Batteries Battery University, [Online]. Available at: [Accessed 8 Feb. 2018]. [4] M. Matousek, Airlines will begin banning smart luggage in 2018, [Online]. Available at: [Accessed 8 Feb. 2018]. [5] Ieee.org, IEEE IEEE Code of Ethics, [Online]. Available at: [Accessed 8 Feb. 2018].
Internal Luggage Scale
 1 Introduction Internal Luggage Scale Team 40 - Ryan Owan, Shivani Mouleeswaran, and Jonathan Li ECE 445 Project Proposal - Fall 2018 TA: Channing Philbrick 1.1 Objective Most major airlines charge additional
1 Introduction Internal Luggage Scale Team 40 - Ryan Owan, Shivani Mouleeswaran, and Jonathan Li ECE 445 Project Proposal - Fall 2018 TA: Channing Philbrick 1.1 Objective Most major airlines charge additional
Autonomous Golf. Team 43 - Thomas Holcomb and William Peterson ECE 445 Project Proposal - Fall 2016 TA: Nicholas Ratajczyk
 Autonomous Golf Team 43 - Thomas Holcomb and William Peterson ECE 445 Project Proposal - Fall 2016 TA: Nicholas Ratajczyk 1. Introduction 1.1 Objective From a practical standpoint, the biggest obstacle
Autonomous Golf Team 43 - Thomas Holcomb and William Peterson ECE 445 Project Proposal - Fall 2016 TA: Nicholas Ratajczyk 1. Introduction 1.1 Objective From a practical standpoint, the biggest obstacle
Bike Safety Sensor. ECE 445 Design Document Jerry Pitts and Edward Wang Group 65 TA: Kexin Hui 2/29/16
 Bike Safety Sensor ECE 445 Design Document Jerry Pitts and Edward Wang Group 65 TA: Kexin Hui 2/29/16 1 Introduction 1.1 Objective The streets are a busy place, and it is impossible to be looking all around
Bike Safety Sensor ECE 445 Design Document Jerry Pitts and Edward Wang Group 65 TA: Kexin Hui 2/29/16 1 Introduction 1.1 Objective The streets are a busy place, and it is impossible to be looking all around
Firefighter Life Monitor
 Firefighter Life Monitor Team 27 - Mary Bucki, Nick Lau, Seth Groharing ECE 445 Project Proposal - Spring 2017 TA: Kexin Hui Introduction: Objective: According to the National Fire Protection Association
Firefighter Life Monitor Team 27 - Mary Bucki, Nick Lau, Seth Groharing ECE 445 Project Proposal - Spring 2017 TA: Kexin Hui Introduction: Objective: According to the National Fire Protection Association
Autonomous Dog Entertainment
 Autonomous Dog Entertainment By Mary Abbott Aimee Rogala Robert Scheuneman Proposal for ECE 445, Senior Design, Spring 2017 TA: Luke Wendt 8February2017 Project No. 16 Contents 1 Introduction...............................................................
Autonomous Dog Entertainment By Mary Abbott Aimee Rogala Robert Scheuneman Proposal for ECE 445, Senior Design, Spring 2017 TA: Luke Wendt 8February2017 Project No. 16 Contents 1 Introduction...............................................................
Department of Electrical and Computer Science
 Department of Electrical and Computer Science Howard University Washington, DC 20059 EECE 401 & 402 Senior Design Final Report By Team AutoMoe Tavares Kidd @ 02744064 Lateef Adetona @02732398 Jordan Lafontant
Department of Electrical and Computer Science Howard University Washington, DC 20059 EECE 401 & 402 Senior Design Final Report By Team AutoMoe Tavares Kidd @ 02744064 Lateef Adetona @02732398 Jordan Lafontant
Laser Tag Droid. Jake Hamill, Martin Litwiller, Christian Topete ECE 445 Project Proposal
 Laser Tag Droid Jake Hamill, Martin Litwiller, Christian Topete ECE 445 Project Proposal 1. Introduction 1.1 Objective Our proposed project is to design, build, and test a remote control laser tag droid
Laser Tag Droid Jake Hamill, Martin Litwiller, Christian Topete ECE 445 Project Proposal 1. Introduction 1.1 Objective Our proposed project is to design, build, and test a remote control laser tag droid
VARTA Energy Storage Systems
 VARTA Energy Storage Systems 130 Years of Battery Expertise in Your Energy Storage System. The perfect combination of long-term experience and modern technology. www.varta-storage.com GOOD REASONS FOR
VARTA Energy Storage Systems 130 Years of Battery Expertise in Your Energy Storage System. The perfect combination of long-term experience and modern technology. www.varta-storage.com GOOD REASONS FOR
Solar RC Boat 49. Team 5: Nisa Chuchawat, Robert Whalen, Zhendong Yang ECE 445 Project Proposal - Fall 2017 TA: Yamuna Phal
 Solar RC Boat 49 Team 5: Nisa Chuchawat, Robert Whalen, Zhendong Yang ECE 445 Project Proposal - Fall 2017 TA: Yamuna Phal 1 Introduction 1.1 Objective Typical RC boats have terrible battery life and long
Solar RC Boat 49 Team 5: Nisa Chuchawat, Robert Whalen, Zhendong Yang ECE 445 Project Proposal - Fall 2017 TA: Yamuna Phal 1 Introduction 1.1 Objective Typical RC boats have terrible battery life and long
Problem Definition Review
 Problem Definition Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team Agenda Background Problem Statement Stakeholders Use Scenario Customer Requirements Engineering Requirements Preliminary Schedule
Problem Definition Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team Agenda Background Problem Statement Stakeholders Use Scenario Customer Requirements Engineering Requirements Preliminary Schedule
VARTA Energy Storage Systems
 VARTA Energy Storage Systems 130 Years of Battery Expertise in Your Energy Storage System. The perfect combination of long-term experience and modern technology. www.varta-storage.com.au Energy Storage
VARTA Energy Storage Systems 130 Years of Battery Expertise in Your Energy Storage System. The perfect combination of long-term experience and modern technology. www.varta-storage.com.au Energy Storage
Mercury VTOL suas Testing and Measurement Plan
 Mercury VTOL suas Testing and Measurement Plan Introduction Mercury is a small VTOL (Vertical Take-Off and Landing) aircraft that is building off of a quadrotor design. The end goal of the project is for
Mercury VTOL suas Testing and Measurement Plan Introduction Mercury is a small VTOL (Vertical Take-Off and Landing) aircraft that is building off of a quadrotor design. The end goal of the project is for
International Journal of Engineering and Techniques - Volume 4 Issue 6, Nov-Dec 2018
 International Journal of Engineering and Techniques - Volume 4 Issue 6, Nov-Dec RESEARCH ARTICLE OPEN ACCESS AUTONOMOUS SOLAR-POWERED GRASS CUTTER Christine Marie J. Madrid 1, Zye Raquel E. Acosta 2, Juliet
International Journal of Engineering and Techniques - Volume 4 Issue 6, Nov-Dec RESEARCH ARTICLE OPEN ACCESS AUTONOMOUS SOLAR-POWERED GRASS CUTTER Christine Marie J. Madrid 1, Zye Raquel E. Acosta 2, Juliet
Robots on Our Sidewalks
 Robots on Our Sidewalks Electronic Personal Delivery Devices Michele Satterlund, September 30, 2017 www.mcguirewoodsconsulting.com March 3, 2017 America is now one step closer to becoming a sci-fi utopia,
Robots on Our Sidewalks Electronic Personal Delivery Devices Michele Satterlund, September 30, 2017 www.mcguirewoodsconsulting.com March 3, 2017 America is now one step closer to becoming a sci-fi utopia,
Detailed Design Review
 Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
INTRODUCTION Team Composition Electrical System
 IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
SAFE DRIVING USING MOBILE PHONES
 SAFE DRIVING USING MOBILE PHONES PROJECT REFERENCE NO. : 37S0527 COLLEGE : SKSVMA COLLEGE OF ENGINEERING AND TECHNOLOGY, GADAG BRANCH : COMPUTER SCIENCE AND ENGINEERING GUIDE : NAGARAJ TELKAR STUDENTS
SAFE DRIVING USING MOBILE PHONES PROJECT REFERENCE NO. : 37S0527 COLLEGE : SKSVMA COLLEGE OF ENGINEERING AND TECHNOLOGY, GADAG BRANCH : COMPUTER SCIENCE AND ENGINEERING GUIDE : NAGARAJ TELKAR STUDENTS
RB-Mel-03. SCITOS G5 Mobile Platform Complete Package
 RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
Table of Contents. Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.
 Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.") March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
Autonomously Controlled Front Loader Senior Project Proposal
 Autonomously Controlled Front Loader Senior Project Proposal by Steven Koopman and Jerred Peterson Submitted to: Dr. Schertz, Dr. Anakwa EE 451 Senior Capstone Project December 13, 2007 Project Summary:
Autonomously Controlled Front Loader Senior Project Proposal by Steven Koopman and Jerred Peterson Submitted to: Dr. Schertz, Dr. Anakwa EE 451 Senior Capstone Project December 13, 2007 Project Summary:
Annual press conference on April 29, 2015 Press images
 Annual press conference on April 29, 2015 Press images 1-RB-21093 Industry 4.0 focus on the user Bosch is on its way to becoming both lead provider and lead exponent in the area of connected production.
Annual press conference on April 29, 2015 Press images 1-RB-21093 Industry 4.0 focus on the user Bosch is on its way to becoming both lead provider and lead exponent in the area of connected production.
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Sensor Suit for the Visually Impaired
 Sensor Suit for the Visually Impaired Proposed Completion Date 2013 People today that are visually impaired at birth or by misfortune have few options for methods of getting around in their every-day lives.
Sensor Suit for the Visually Impaired Proposed Completion Date 2013 People today that are visually impaired at birth or by misfortune have few options for methods of getting around in their every-day lives.
Techniques for Protecting Smart Sweeping Robots
 the consumer. This article discusses several solutions for improving the protection of smart sweeping robots. Resettable Circuit Protection with PPTC Devices Abstract In recent years the development of
the consumer. This article discusses several solutions for improving the protection of smart sweeping robots. Resettable Circuit Protection with PPTC Devices Abstract In recent years the development of
Please see the judging schedule for dates and times if you would like to do face to face judging.
 DEPARTMENT 124 MECHANICAL PROJECTS Please see the judging schedule for dates and times if you would like to do face to face judging. CLASS A AEROSPACE Exhibits can be in a low cut box or tray. Open to
DEPARTMENT 124 MECHANICAL PROJECTS Please see the judging schedule for dates and times if you would like to do face to face judging. CLASS A AEROSPACE Exhibits can be in a low cut box or tray. Open to
Content. Introduction. Technology. Type of unmanned vehicle. Past, Present, Future. Conclusion
 Introduction Content Technology Type of unmanned vehicle Past, Present, Future Conclusion What is unmanned vehicles? l Without a person on board l Remote controlled l Remote guided vehicles Reduce casualty
Introduction Content Technology Type of unmanned vehicle Past, Present, Future Conclusion What is unmanned vehicles? l Without a person on board l Remote controlled l Remote guided vehicles Reduce casualty
Component Parameter Design Specification. Positioning Accuracy <1.5 meter
 Component Parameter Design Specification Collision Detection Range 3 feet Motors Speed >1.5 mph Battery Charge Time 3 hours Battery Discharge Time 5 hours Positioning Accuracy
Component Parameter Design Specification Collision Detection Range 3 feet Motors Speed >1.5 mph Battery Charge Time 3 hours Battery Discharge Time 5 hours Positioning Accuracy
Solar Power-Optimized Cart
 Solar Power-Optimized Cart Initial Project and Group Identification Document Due: September 17, 2013 Group #28 Group Members: Jacob Bitterman Cameron Boozarjomehri William Ellett Potential Sponsors: Duke
Solar Power-Optimized Cart Initial Project and Group Identification Document Due: September 17, 2013 Group #28 Group Members: Jacob Bitterman Cameron Boozarjomehri William Ellett Potential Sponsors: Duke
UNIVERSITÉ DE MONCTON FACULTÉ D INGÉNIERIE. Moncton, NB, Canada PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY
 FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
UAE Ministry of Interior pilot project for RFID-based SCHOOLBUS/STUDENT TRACKING SYSTEM
 UAE Ministry of Interior pilot project for RFID-based SCHOOLBUS/STUDENT TRACKING SYSTEM Safe, secure and verified school bus transportation TECHNOLOGY School bus route tracking and live data transmission
UAE Ministry of Interior pilot project for RFID-based SCHOOLBUS/STUDENT TRACKING SYSTEM Safe, secure and verified school bus transportation TECHNOLOGY School bus route tracking and live data transmission
Forget self-driving cars. A CMU spinoff is helping to make self-piloted, flying taxis.
 Forget self-driving cars. A CMU spinoff is helping to make self-piloted, flying taxis. August 23, 2017 3:30 PM By Courtney Linder / Pittsburgh Post-Gazette Sure, you can hail a self-driving Uber with the
Forget self-driving cars. A CMU spinoff is helping to make self-piloted, flying taxis. August 23, 2017 3:30 PM By Courtney Linder / Pittsburgh Post-Gazette Sure, you can hail a self-driving Uber with the
Thermal Management: Key-Off & Soak
 Thermal Management: Key-Off & Soak A whitepaper discussing the issues automotive engineers face every day attempting to accurately predict thermal conditions during thermal transients Exa Corporation 2015/16
Thermal Management: Key-Off & Soak A whitepaper discussing the issues automotive engineers face every day attempting to accurately predict thermal conditions during thermal transients Exa Corporation 2015/16
Senior Design 1 First Draft. Station. The Smart Solar Powered Cell Phone Charging Station
 Senior Design 1 First Draft UniverSOL Charge Station The Smart Solar Powered Cell Phone Charging Station Amy Parkinson Brock Stoops John Curristan Jonathan German Group #17 Project Narrative Description:
Senior Design 1 First Draft UniverSOL Charge Station The Smart Solar Powered Cell Phone Charging Station Amy Parkinson Brock Stoops John Curristan Jonathan German Group #17 Project Narrative Description:
Sequential LED Tail Lights For Ford Mustang
 Sequential LED Tail Lights For Ford Mustang Project Proposal Brandon Delgado Western Washington University EET Fall 2013 Page 1 of 5 I. Project Summary The Proposed project is the design and creation of
Sequential LED Tail Lights For Ford Mustang Project Proposal Brandon Delgado Western Washington University EET Fall 2013 Page 1 of 5 I. Project Summary The Proposed project is the design and creation of
Folding Shopping Cart Design Report
 Folding Shopping Cart Design Report EDSGN 100 Section 010, Team #4 Submission Date- 10/28/2013 Group Image with Prototype Submitted by: Arafat Hossain, Mack Burgess, Jake Covell, and Connor Pechko (in
Folding Shopping Cart Design Report EDSGN 100 Section 010, Team #4 Submission Date- 10/28/2013 Group Image with Prototype Submitted by: Arafat Hossain, Mack Burgess, Jake Covell, and Connor Pechko (in
PROJECT PROPOSAL FIRE FIGHTING ROBOT CHALLENGE THE ENGINEERS: SUBMITTED TO: SPONSORED BY: Micro Fire Extinguisher
 FIRE FIGHTING ROBOT CHALLENGE Micro Fire Extinguisher PROJECT PROPOSAL SUBMITTED TO: JOHN KENNEDY & R. LAL TUMMALA DESIGN CO. LTD, SAN DIEGO, CA SPONSORED BY: SAN DIEGO STATE UNIVERSITY SENIOR DESIGN PROJECT
FIRE FIGHTING ROBOT CHALLENGE Micro Fire Extinguisher PROJECT PROPOSAL SUBMITTED TO: JOHN KENNEDY & R. LAL TUMMALA DESIGN CO. LTD, SAN DIEGO, CA SPONSORED BY: SAN DIEGO STATE UNIVERSITY SENIOR DESIGN PROJECT
TRANSFORMER SERVICE. ABB Ability inspection for transformers TXplore Oil-filled transformer internal inspection service
 TRANSFORMER SERVICE ABB Ability inspection for transformers TXplore Oil-filled transformer internal inspection service 2 ABB ABILIT Y INSPECTION FOR TR ANSFORMERS TXPLORE Use ABB's inspection service to
TRANSFORMER SERVICE ABB Ability inspection for transformers TXplore Oil-filled transformer internal inspection service 2 ABB ABILIT Y INSPECTION FOR TR ANSFORMERS TXPLORE Use ABB's inspection service to
Final Report. James Buttice B.L.a.R.R. EEL 5666L Intelligent Machine Design Laboratory. Instructors: Dr. A Antonio Arroyo and Dr. Eric M.
 Final Report James Buttice B.L.a.R.R. EEL 5666L Intelligent Machine Design Laboratory Instructors: Dr. A Antonio Arroyo and Dr. Eric M. Schwartz Teaching Assistants: Mike Pridgen and Thomas Vermeer Table
Final Report James Buttice B.L.a.R.R. EEL 5666L Intelligent Machine Design Laboratory Instructors: Dr. A Antonio Arroyo and Dr. Eric M. Schwartz Teaching Assistants: Mike Pridgen and Thomas Vermeer Table
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
NICOSIA! A SMART, SUSTAINABLE, ACCESSIBLE Capital City. Nassos Kolyvas - Transportation/ Engineer
 NICOSIA! A SMART, SUSTAINABLE, ACCESSIBLE Capital City Nassos Kolyvas - Transportation/ Engineer Nicosia Smart City Challenges How we addressing the challenges of TODAY and TOMORROW Transportation
NICOSIA! A SMART, SUSTAINABLE, ACCESSIBLE Capital City Nassos Kolyvas - Transportation/ Engineer Nicosia Smart City Challenges How we addressing the challenges of TODAY and TOMORROW Transportation
Secondary Mobility Device for Airline Travel
 Product Design Specifications Document: Secondary Mobility Device for Airline Travel Team Members: Project Leader: Will Fox Communicator: Grant Karlsson Ellifson BSAC, BPAG: Jonathan Evans BWIG: Desiree
Product Design Specifications Document: Secondary Mobility Device for Airline Travel Team Members: Project Leader: Will Fox Communicator: Grant Karlsson Ellifson BSAC, BPAG: Jonathan Evans BWIG: Desiree
RTOS-CAR USING ARM PROCESSOR
 Int. J. Chem. Sci.: 14(S3), 2016, 906-910 ISSN 0972-768X www.sadgurupublications.com RTOS-CAR USING ARM PROCESSOR R. PATHAMUTHU *, MUHAMMED SADATH ALI, RAHIL and V. RUBIN ECE Department, Aarupadai Veedu
Int. J. Chem. Sci.: 14(S3), 2016, 906-910 ISSN 0972-768X www.sadgurupublications.com RTOS-CAR USING ARM PROCESSOR R. PATHAMUTHU *, MUHAMMED SADATH ALI, RAHIL and V. RUBIN ECE Department, Aarupadai Veedu
Wi-Fi Enabled Motorized Windows for Automatic Climate Control
 ECE 445: Senior Design Spring 2017 Project Proposal Wi-Fi Enabled Motorized Windows for Automatic Climate Control Team 34 Trevor Bush (tsbush2) Alex Casino (casino2) Ryan Stark (rmstark3) TA: Kexin Hui
ECE 445: Senior Design Spring 2017 Project Proposal Wi-Fi Enabled Motorized Windows for Automatic Climate Control Team 34 Trevor Bush (tsbush2) Alex Casino (casino2) Ryan Stark (rmstark3) TA: Kexin Hui
Chrysler Portal Concept ENGINEERING
 Chrysler Portal Concept ENGINEERING Chrysler Portal Concept Engineered to Roll with Millennials Life Stages Sensor technologies enable SAE Level 3 autonomous driving; upgrade to higher levels of autonomy
Chrysler Portal Concept ENGINEERING Chrysler Portal Concept Engineered to Roll with Millennials Life Stages Sensor technologies enable SAE Level 3 autonomous driving; upgrade to higher levels of autonomy
Le développement technique des véhicules autonomes
 Shaping the future Le développement technique des véhicules autonomes Renaud Dubé, Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Fribourg, 23 Juin 2016 Renaud Dubé 23.06.2016 1 Content
Shaping the future Le développement technique des véhicules autonomes Renaud Dubé, Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Fribourg, 23 Juin 2016 Renaud Dubé 23.06.2016 1 Content
PROJECT IDEA SUBMISSION STUDENT
 PROJECT IDEA SUBMISSION STUDENT Team Contacts - 1 st person listed serves as the point of contact with Professor Jensen - Initial team size may be from 4 to 6 members (all members must agree to have their
PROJECT IDEA SUBMISSION STUDENT Team Contacts - 1 st person listed serves as the point of contact with Professor Jensen - Initial team size may be from 4 to 6 members (all members must agree to have their
Initial Project and Group Identification Document. Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle)
") Initial Project and Group Identification Document Project Idea: Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle) Team Members: Robertson Augustine (Computer Engineer)
Initial Project and Group Identification Document Project Idea: Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle) Team Members: Robertson Augustine (Computer Engineer)
Project Narrative Description
 0 Project Narrative Description Charge Spot is intended to demonstrate the feasibility of an autonomous electric vehicle charging system for residential use. The goal of Charge Spot is to have no user
0 Project Narrative Description Charge Spot is intended to demonstrate the feasibility of an autonomous electric vehicle charging system for residential use. The goal of Charge Spot is to have no user
DRILLING AND SCREWDRIVING. Product range. Tools for the toughest demands
 DRILLING AND SCREWDRIVING Product range Tools for the toughest demands Most cordless tools are simple everyday objects. A Festool drill, however, is something unique. A cordless drill has certain basic
DRILLING AND SCREWDRIVING Product range Tools for the toughest demands Most cordless tools are simple everyday objects. A Festool drill, however, is something unique. A cordless drill has certain basic
Straight Talk. About the Smart Grid. Introduction
 Straight Talk About the Smart Grid Introduction It s no secret that we depend on electricity for nearly everything we do. Today, our homes are larger and have more appliances and electronic equipment than
Straight Talk About the Smart Grid Introduction It s no secret that we depend on electricity for nearly everything we do. Today, our homes are larger and have more appliances and electronic equipment than
System Integration of an Electronic Monitoring System in All-Terrain Vehicles
 System Integration of an Electronic Monitoring System in All-Terrain Vehicles Waylin Wing Central Michigan University, Mount Pleasant, MI 48858 Email: wing1wj@cmich.edu An electronic monitoring system
System Integration of an Electronic Monitoring System in All-Terrain Vehicles Waylin Wing Central Michigan University, Mount Pleasant, MI 48858 Email: wing1wj@cmich.edu An electronic monitoring system
The Bergen region is at the forefront of developing smart transport solutions
 The Bergen region is at the forefront of developing smart transport solutions Imagine a region where: public agencies collaborate closely to solve common challenges and create the mobility solutions of
The Bergen region is at the forefront of developing smart transport solutions Imagine a region where: public agencies collaborate closely to solve common challenges and create the mobility solutions of
AUTOPILOT Webinar Series (II): Developing Automated Driving Pilots for IoT: Brainport
: Developing Automated Driving Pilots for IoT: Brainport") AUTOPILOT Webinar Series (II): Developing Automated Driving Pilots for IoT: Brainport 31 May 2018 16.00-17.00 CET 31/05/2018 This project has received funding from the European Union s Horizon 2020 research
AUTOPILOT Webinar Series (II): Developing Automated Driving Pilots for IoT: Brainport 31 May 2018 16.00-17.00 CET 31/05/2018 This project has received funding from the European Union s Horizon 2020 research
HOW REAL PEOPLE VIEW THE FUTURE OF MOBILITY
 HOW REAL PEOPLE VIEW THE FUTURE OF MOBILITY OVERVIEW 1 2 3 Key Points Methodology: Adults overwhelmingly regard January the automotive 20 21, 2018. The industry as innovative, dynamic and changing for
HOW REAL PEOPLE VIEW THE FUTURE OF MOBILITY OVERVIEW 1 2 3 Key Points Methodology: Adults overwhelmingly regard January the automotive 20 21, 2018. The industry as innovative, dynamic and changing for
10 questions and answers about electric cars
 This site uses cookies from Google to deliver its services, to personalize ads and to analyze traffic. Information about your use of this site is shared with Google. By using this site, you agree to its
This site uses cookies from Google to deliver its services, to personalize ads and to analyze traffic. Information about your use of this site is shared with Google. By using this site, you agree to its
ASME Human Powered Vehicle
 ASME Human Powered Vehicle By Yousef Alanzi, Evan Bunce, Cody Chenoweth, Haley Flenner, Brent Ives, and Connor Newcomer Team 14 Problem Definition and Project Plan Document Submitted towards partial fulfillment
ASME Human Powered Vehicle By Yousef Alanzi, Evan Bunce, Cody Chenoweth, Haley Flenner, Brent Ives, and Connor Newcomer Team 14 Problem Definition and Project Plan Document Submitted towards partial fulfillment
Lunar Escape: Development of Astronaut Recovery Rover Program
 Lunar Escape: Development of Astronaut Recovery Rover Program Nicholas Wade-Mayhue, Dan Janke, Kyle Kilgore, Mohammed Alzohay, Samad Qureshi Colorado School of Mines Advisor: Dr. Knecht nwademay@mines.edu
Lunar Escape: Development of Astronaut Recovery Rover Program Nicholas Wade-Mayhue, Dan Janke, Kyle Kilgore, Mohammed Alzohay, Samad Qureshi Colorado School of Mines Advisor: Dr. Knecht nwademay@mines.edu
McGill Electric Snowmobile Team
 McGill Electric Snowmobile Team 817 Sherbrooke Ouest MacDonald Eng. Bldg. 460 Montréal (Québec) H3A 2K6 phone : 514.398.4400 x09043 email:electricsnowmobile@mail.mcgill.ca The Future Is Knocking At Your
McGill Electric Snowmobile Team 817 Sherbrooke Ouest MacDonald Eng. Bldg. 460 Montréal (Québec) H3A 2K6 phone : 514.398.4400 x09043 email:electricsnowmobile@mail.mcgill.ca The Future Is Knocking At Your
Vehicle Diagnostic Logging Device
 UCCS SENIOR DESIGN Vehicle Diagnostic Logging Device Design Requirements Specification Prepared by Mackenzie Lowrance, Nick Hermanson, and Whitney Watson Sponsor: Tyson Hartshorn with New Planet Technologies
UCCS SENIOR DESIGN Vehicle Diagnostic Logging Device Design Requirements Specification Prepared by Mackenzie Lowrance, Nick Hermanson, and Whitney Watson Sponsor: Tyson Hartshorn with New Planet Technologies
1. Introduction Objective Background High-level Requirement Design Block Diagram Physical Design 4
 Contents 1. Introduction 3 1.1 Objective 3 1.2 Background 3 1.3 High-level Requirement 3 2. Design 3 2.1 Block Diagram 3 2.2 Physical Design 4 2.3 Power Supply 5 2.3.1 Lithium Battery 5 2.3.1 Voltage Regulators
Contents 1. Introduction 3 1.1 Objective 3 1.2 Background 3 1.3 High-level Requirement 3 2. Design 3 2.1 Block Diagram 3 2.2 Physical Design 4 2.3 Power Supply 5 2.3.1 Lithium Battery 5 2.3.1 Voltage Regulators
RED RAVEN, THE LINKED-BOGIE PROTOTYPE. Ara Mekhtarian, Joseph Horvath, C.T. Lin. Department of Mechanical Engineering,
 RED RAVEN, THE LINKED-BOGIE PROTOTYPE Ara Mekhtarian, Joseph Horvath, C.T. Lin Department of Mechanical Engineering, California State University, Northridge California, USA Abstract RedRAVEN is a pioneered
RED RAVEN, THE LINKED-BOGIE PROTOTYPE Ara Mekhtarian, Joseph Horvath, C.T. Lin Department of Mechanical Engineering, California State University, Northridge California, USA Abstract RedRAVEN is a pioneered
Introduction to Engineering Design 100. Foldable Shopping Cart
 1 Introduction to Engineering Design 100 Section 10 Team 7 Foldable Shopping Cart Submitted by: Nick Vuotto, Quoc Tran, Pete White, Mark Cecco (from left to right) Submitted to: Xinli Wu Spring 2014 2
1 Introduction to Engineering Design 100 Section 10 Team 7 Foldable Shopping Cart Submitted by: Nick Vuotto, Quoc Tran, Pete White, Mark Cecco (from left to right) Submitted to: Xinli Wu Spring 2014 2
e fix Power add-on drive
 e fix Power add-on drive APPROVED MEDICAL PRODUCT Small. Light. Swift. Experience mobility pure and simple Enjoy a new degree of mobility With e-fix, the electrical add-on drive for your wheelchair, you
e fix Power add-on drive APPROVED MEDICAL PRODUCT Small. Light. Swift. Experience mobility pure and simple Enjoy a new degree of mobility With e-fix, the electrical add-on drive for your wheelchair, you
Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials. Ripley Valley Rural Fire Brigade - August 2010
 Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials Ripley Valley Rural Fire Brigade - August 2010 The Brigade offered to help evaluate the capabilities of an Unmanned Aerial Vehicle (UAV)
Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials Ripley Valley Rural Fire Brigade - August 2010 The Brigade offered to help evaluate the capabilities of an Unmanned Aerial Vehicle (UAV)
White Paper. How Do I Know I Can Rely on It? The Business and Technical Cases for Solar-Recharged Video Surveillance Systems
 White Paper How Do I Know I Can Rely on It? The Business and Technical Cases for Solar-Recharged Video Surveillance Systems Introduction Remote cameras are a security professional s eyes at the edges of
White Paper How Do I Know I Can Rely on It? The Business and Technical Cases for Solar-Recharged Video Surveillance Systems Introduction Remote cameras are a security professional s eyes at the edges of
The electric drive for active wheelchairs APPROVED MEDICAL PRODUCT. Energize your wheelchair.
 The electric drive for active wheelchairs APPROVED MEDICAL PRODUCT Energize your wheelchair. www.alber.de Lots of fun and mobility! Pushing the boundaries. In today s world, one thing matters more than
The electric drive for active wheelchairs APPROVED MEDICAL PRODUCT Energize your wheelchair. www.alber.de Lots of fun and mobility! Pushing the boundaries. In today s world, one thing matters more than
UNITR B/8261. Your latestgeneration. AGV system
 UNITR B/8261 Your latestgeneration AGV system Short and succinct Operation web-based, intuitive Drive Safe an exemplary safety concept Multitalented automatic module changes Navigation simple, flexible,
UNITR B/8261 Your latestgeneration AGV system Short and succinct Operation web-based, intuitive Drive Safe an exemplary safety concept Multitalented automatic module changes Navigation simple, flexible,
COMPLETE SOLUTIONS FOR ELECTRIC MOBILITY
 COMPLETE SOLUTIONS FOR ELECTRIC MOBILITY MOST INNOVATIVE CHARGING SOLUTIONS LEVIAMP STREET LIGHT CHARGER Introducing our ceiling mounted charging station for electric vehicles. A unique movable arm technology
COMPLETE SOLUTIONS FOR ELECTRIC MOBILITY MOST INNOVATIVE CHARGING SOLUTIONS LEVIAMP STREET LIGHT CHARGER Introducing our ceiling mounted charging station for electric vehicles. A unique movable arm technology
Electrical Engineering Within a Robotic System
 Electrical Engineering Within a Robotic System Carli Hand Fall, 2016 Synopsis The NASA Robotics Mining Competition (RMC) is held every year at Kennedy Space Center, Florida. Fifty universities assemble
Electrical Engineering Within a Robotic System Carli Hand Fall, 2016 Synopsis The NASA Robotics Mining Competition (RMC) is held every year at Kennedy Space Center, Florida. Fifty universities assemble
DRIVERLESS SCHOOL BUS
 World Robot Olympiad 2019 WeDo Open Category Game Description, Rules and Evaluation SMART CITIES DRIVERLESS SCHOOL BUS Version: January 15 th WRO International Premium Partners INTRODUCTION... 2 1. CHALLENGE
World Robot Olympiad 2019 WeDo Open Category Game Description, Rules and Evaluation SMART CITIES DRIVERLESS SCHOOL BUS Version: January 15 th WRO International Premium Partners INTRODUCTION... 2 1. CHALLENGE
ABB Journey to Digital New ways of Collaboration with Customers
 ASUT ANNUAL GENERAL MEETING 2017, 18. MAI 2017 ABB Journey to Digital New ways of Collaboration with Customers Sandro Maciocia, Agenda ABB Group ABB Ability solutions & platform Project Example ABB Journey
ASUT ANNUAL GENERAL MEETING 2017, 18. MAI 2017 ABB Journey to Digital New ways of Collaboration with Customers Sandro Maciocia, Agenda ABB Group ABB Ability solutions & platform Project Example ABB Journey
10 questions and answers about electric cars
 10 questions and answers about electric cars https://www./en/innovation/10-questions-answers-electric-cars/ The future of cars will be electric. But what does this mean in practice? How far will the cars
10 questions and answers about electric cars https://www./en/innovation/10-questions-answers-electric-cars/ The future of cars will be electric. But what does this mean in practice? How far will the cars
June 5, Crowdcoding IT Solutions UG (ha tungsbeschränkt)
") June 5, 2018 Crowdcoding IT Solutions UG (ha tungsbeschränkt) Contents About Us Recent Projects How Do We Work? 0 About Us Students at RWTH Aachen University Jobs in IT security and automotive sector Young,
June 5, 2018 Crowdcoding IT Solutions UG (ha tungsbeschränkt) Contents About Us Recent Projects How Do We Work? 0 About Us Students at RWTH Aachen University Jobs in IT security and automotive sector Young,
Enhancing Wheelchair Mobility Through Dynamics Mimicking
 Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
Deep Learning Will Make Truly Self-Driving Cars a Reality
 Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
ZF Advances Key Technologies for Automated Driving
 Page 1/5, January 9, 2017 ZF Advances Key Technologies for Automated Driving ZF s See Think Act supports self-driving cars and trucks ZF and NVIDIA provide computing power to bring artificial intelligence
Page 1/5, January 9, 2017 ZF Advances Key Technologies for Automated Driving ZF s See Think Act supports self-driving cars and trucks ZF and NVIDIA provide computing power to bring artificial intelligence
AUTONOMY AND SMART URBAN MOBILITY
 AUTONOMY AND SMART URBAN MOBILITY November 15, 2017 Emilio Frazzoli Professor of Dynamic Systems and Control, ETH Zürich Co-Founder and CTO Why Self-driving Vehicles? A financial perspective on personal
AUTONOMY AND SMART URBAN MOBILITY November 15, 2017 Emilio Frazzoli Professor of Dynamic Systems and Control, ETH Zürich Co-Founder and CTO Why Self-driving Vehicles? A financial perspective on personal
DESIGN AND FABRICATION OF A SOLAR POWERED LAWN MOWER
 DESIGN AND FABRICATION OF A SOLAR POWERED LAWN MOWER M. M. Rahman 1, Md. Naziur Rahman 2,* and Rifat Hasan 3 1-3 Department of Mechanical Engineering Chittagong University of Engineering & Technology,
DESIGN AND FABRICATION OF A SOLAR POWERED LAWN MOWER M. M. Rahman 1, Md. Naziur Rahman 2,* and Rifat Hasan 3 1-3 Department of Mechanical Engineering Chittagong University of Engineering & Technology,
The Motorcycle Industry in Europe. Powered Two-Wheelers the SMART Choice for Urban Mobility
 The Motorcycle Industry in Europe Powered Two-Wheelers the SMART Choice for Urban Mobility PTWs: the SMART Choice For Urban Mobility Europe s cities are main engines of economic growth, but today s urbanisation
The Motorcycle Industry in Europe Powered Two-Wheelers the SMART Choice for Urban Mobility PTWs: the SMART Choice For Urban Mobility Europe s cities are main engines of economic growth, but today s urbanisation
Smart cities & effective mobility management solutions - 25 th March, San Paulo ViajeoPLUS Latin American Innovation week.
 Smart cities & effective mobility management solutions - 25 th March, San Paulo ViajeoPLUS Latin American Innovation week. SWARCO AG Content Global changes & Challenges Smart City Effective Mobility solutions
Smart cities & effective mobility management solutions - 25 th March, San Paulo ViajeoPLUS Latin American Innovation week. SWARCO AG Content Global changes & Challenges Smart City Effective Mobility solutions
VDE FNN Information Solutions for the Future Power Grid
 VDE FNN Information Solutions for the Future Power Grid We are evolving the grid VDE Association The VDE Association for Electrical, Electronic and Information Technologies is one of the largest technical
VDE FNN Information Solutions for the Future Power Grid We are evolving the grid VDE Association The VDE Association for Electrical, Electronic and Information Technologies is one of the largest technical
Preliminary Design Report. Project Title: Lunabot
 EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 30 January 2012 Project Title: Lunabot Team Name: UF Lunabotics Team Members: Name: Matt Morgan Name: UF Lunabotics Team
EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 30 January 2012 Project Title: Lunabot Team Name: UF Lunabotics Team Members: Name: Matt Morgan Name: UF Lunabotics Team
Intelligent Transportation Systems. Secure solutions for smart roads and connected highways. Brochure Intelligent Transportation Systems
 Intelligent Transportation Systems Secure solutions for smart roads and connected highways Secure solutions for smart roads and connected highways Today s technology is delivering new opportunities for
Intelligent Transportation Systems Secure solutions for smart roads and connected highways Secure solutions for smart roads and connected highways Today s technology is delivering new opportunities for
Oakland University Presents:
 Oakland University Presents: I certify that the engineering design present in this vehicle is significant and equivalent to work that would satisfy the requirements of a senior design or graduate project
Oakland University Presents: I certify that the engineering design present in this vehicle is significant and equivalent to work that would satisfy the requirements of a senior design or graduate project
THE SMART WAY TO PARK. wireless vehicle detection system
 THE SMART WAY TO PARK wireless vehicle detection system Finding a free parking spot no longer drives you crazy City of the future Experts predict that the number of motorized vehicles in heavily populated
THE SMART WAY TO PARK wireless vehicle detection system Finding a free parking spot no longer drives you crazy City of the future Experts predict that the number of motorized vehicles in heavily populated
Wind Turbine Phone Charger
 Wind Turbine Phone Charger ECE 445 - Spring 2018 Mock Design Review Group 41: Kemal Emre Ercikti Charlie Hummel Sachin Reddy TA: Dongwei Shi Diagrams Figure 1: Block Diagram #1 Figure 2: Block Diagram
Wind Turbine Phone Charger ECE 445 - Spring 2018 Mock Design Review Group 41: Kemal Emre Ercikti Charlie Hummel Sachin Reddy TA: Dongwei Shi Diagrams Figure 1: Block Diagram #1 Figure 2: Block Diagram
MINIMISE THE RISK FROM YOUR HAZARDOUS WORKSITE
 MINIMISE THE RISK FROM YOUR HAZARDOUS WORKSITE INDUSTRIAL REMOTE CONTROL SOLUTIONS rct-global.com HANDHELD REMOTES CM1000 The ControlMaster CM1000 handheld remote control range is purpose-built for mining
MINIMISE THE RISK FROM YOUR HAZARDOUS WORKSITE INDUSTRIAL REMOTE CONTROL SOLUTIONS rct-global.com HANDHELD REMOTES CM1000 The ControlMaster CM1000 handheld remote control range is purpose-built for mining
Palos Verdes High School 1
 Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
MIPRover: A Two-Wheeled Dynamically Balancing Mobile Inverted Pendulum Robot
 ECE 3992 Senior Project Proposal MIPRover: A Two-Wheeled Dynamically Balancing Mobile Inverted Pendulum Robot 6 May 2005 Prepared By: Kevin E. Waters Department of Electrical and Computer Engineering University
ECE 3992 Senior Project Proposal MIPRover: A Two-Wheeled Dynamically Balancing Mobile Inverted Pendulum Robot 6 May 2005 Prepared By: Kevin E. Waters Department of Electrical and Computer Engineering University
Ryan Dufrene, Matthew Kreider, Jason Smith, Bao Doan
 Ryan Dufrene, Matthew Kreider, Jason Smith, Bao Doan Problem Finding a Spot? Our Project User Our Project Engineering Requirements The sensor device should consume no more than 3W. The system should use
Ryan Dufrene, Matthew Kreider, Jason Smith, Bao Doan Problem Finding a Spot? Our Project User Our Project Engineering Requirements The sensor device should consume no more than 3W. The system should use
Industrial machinery and heavy equipment. Hatz Diesel. Developing a water-cooled industrial engine with the help of Siemens PLM Software
 Industrial machinery and heavy equipment Product Simcenter Manufacturer uses Simcenter Amesim to design diesel engines faster and more efficiently Business challenges Meet strict governmental standards
Industrial machinery and heavy equipment Product Simcenter Manufacturer uses Simcenter Amesim to design diesel engines faster and more efficiently Business challenges Meet strict governmental standards
About Steel Market Development Institute
 About Steel Market Development Institute A business unit of the American Iron and Steel Institute SMDI s Automotive Market program is led by the Automotive Applications Council (AAC) with the member companies
About Steel Market Development Institute A business unit of the American Iron and Steel Institute SMDI s Automotive Market program is led by the Automotive Applications Council (AAC) with the member companies
235 E. Colorado Blvd., Pasadena, CA
 www.urb-e.com Transportation. 235 E. Colorado Blvd., Pasadena, Revolutionized. CA 91101 626-460-8113 support@urb-e.com URB-E revolutionizes urban mobility by creating a clean-energy vehicle that is lightweight,
www.urb-e.com Transportation. 235 E. Colorado Blvd., Pasadena, Revolutionized. CA 91101 626-460-8113 support@urb-e.com URB-E revolutionizes urban mobility by creating a clean-energy vehicle that is lightweight,
POWER ASSIST FOR WHEELCHAIRS POWER AT YOUR HANDS.
 POWER ASSIST FOR WHEELCHAIRS POWER AT YOUR HANDS. POWERFUL. LIGHT. WELL THOUGHT OUT. 2 EASIER TO MOVE The concept of the e-motion is ingeniously simple: You can combine the e-motion drive wheels with almost
POWER ASSIST FOR WHEELCHAIRS POWER AT YOUR HANDS. POWERFUL. LIGHT. WELL THOUGHT OUT. 2 EASIER TO MOVE The concept of the e-motion is ingeniously simple: You can combine the e-motion drive wheels with almost
2016 Car Tech Impact Study. January 2016
 2016 Car Tech Impact Study January 2016 Objectives & Methodology Objectives Identify vehicle technologies that are currently being used and that are must haves for future vehicle purchases Determine how
2016 Car Tech Impact Study January 2016 Objectives & Methodology Objectives Identify vehicle technologies that are currently being used and that are must haves for future vehicle purchases Determine how
Innovative Stations for an Innovative Transport System the Maglev Stations Munich Central Railway Station ( Hauptbahnhof ) Airport
 Airport") Innovative Stations for an Innovative Transport System the Maglev Stations Munich Central Railway Station ( Hauptbahnhof ) Airport Knut Marscholek-Uecker Deutsche Bahn AG, Berlin, knut.marscholek-uecker@bahn.de
Innovative Stations for an Innovative Transport System the Maglev Stations Munich Central Railway Station ( Hauptbahnhof ) Airport Knut Marscholek-Uecker Deutsche Bahn AG, Berlin, knut.marscholek-uecker@bahn.de
EPSRC-JLR Workshop 9th December 2014 TOWARDS AUTONOMY SMART AND CONNECTED CONTROL
 EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
There s a New Powerhouse in Town
 There s a New Powerhouse in Town By Edward R. Breneiser, WA3WSJ I ve been working on my Icom 703 Plus HFpack about two years now. I think I just found a great power source for it. I was using a good power
There s a New Powerhouse in Town By Edward R. Breneiser, WA3WSJ I ve been working on my Icom 703 Plus HFpack about two years now. I think I just found a great power source for it. I was using a good power
AUTOMATIC STANDBY GENERATORS
 AUTOMATIC STANDBY GENERATORS Generac s standby generators provide the automatic backup power you need to protect your home and family during a power outage. Connected to your existing LP or natural gas
AUTOMATIC STANDBY GENERATORS Generac s standby generators provide the automatic backup power you need to protect your home and family during a power outage. Connected to your existing LP or natural gas
LiFePO4 Instruction Manual. LFP12V50A LFP12V100A LFP12V200A 50Ah 100Ah 200Ah
 LiFePO4 Instruction Manual LFP12V50A LFP12V100A LFP12V200A 50Ah 100Ah 200Ah Contents FEATURES... 2 SAFETY CHARACTERISTICS... 2 WARNING!... 3 CHARGING... 4 MAINTAINING THE BATTERY... 4 INSTALLATION... 4
LiFePO4 Instruction Manual LFP12V50A LFP12V100A LFP12V200A 50Ah 100Ah 200Ah Contents FEATURES... 2 SAFETY CHARACTERISTICS... 2 WARNING!... 3 CHARGING... 4 MAINTAINING THE BATTERY... 4 INSTALLATION... 4