Department of Electrical and Computer Science
|
|
|
- Gervais Potter
- 5 years ago
- Views:
Transcription

1 Department of Electrical and Computer Science Howard University Washington, DC EECE 401 & 402 Senior Design Final Report By Team AutoMoe Tavares Lateef Jordan C Advisor: Dr. Danda Rawat Instructor, Charles Kim Ph.D Submitted: 4/25/18 1
2 Summary Team AutoMoe s goal is to develop an autonomous car. We shall achieve this goal by combining the functions of different sensors and modules to emulate high levels of autonomy. Our goal for the academic school year was to deliver an autonomous RC car that shall perform the following basic functions without human influence: (a) moving from a starting location to a desired destination and (b) avoiding other obstacles (other vehicles, humans, road structures) along the path the desired destination. Problem Statement If driving has numerous hazards and obstructions that can damage a vehicle and its passengers then awareness of your immediate surroundings to avoid collisions is the ideal way to increase roadway safety. Design Requirement The design requirements that would meet the needs addressed in the problem statement were addressed as an autonomous vehicle;that requires spatial awareness in real time as well as an efficient enough response to avoid obstacles. The AutoMoe vehicle must have the following capabilities in order to have a design that is a solution to the problem, a 15cm field of vision ahead of itself, a 8 cm field of vision on both the left and right side, Acceleration control, Motor/Direction control, self sustaining power system. The design requirements is based on our desire for the autonomous vehicle to require no external support, and function without human intervention while also being a cost efficient implementation compared to other systems. A self powering system ensures that a decrease in voltage over time will not have an impact on the 2
3 system functionality. As part of our design requirements, we ensured that our design aligned with the regulations and standard that have been set for electronic devices and the vehicle industry. The Autonomous Car vehicle must adhere to IEEE standard 1582 in regards to non hazardous electronic systems and the stability of the device. Similarly The IEEE standard standard which applies to rotating electric machinery which forms part of the propulsion and major auxiliary equipment on internally and externally powered electrically propelled rail and road vehicles and similar large transport and haulage vehicles and their trailers where specified in the contract. Current State of Art The Society of Automotive Engineers released a range of levels to describe automated driving systems which is now adopted by the National Highway Traffic Safety Administration. To start, Level 0 is defined as vehicle functionality is completely controlled by the human driver. Level 1 is assigned to define a vehicle with automation of only 1 function such as cruise control. Level 2 is to define a vehicle with simultaneous automation of more than 1 function such navigation and deceleration, working together in an integrated vehicle system; however, the human driver must remain engaged. Level 3 is defined as functionality of the vehicle is satisfactorily automated to afford engagement of other activities by the driver but human failsafe feature is available.lastly is Level 4 which is complete automation. There is no need for a human driver. Currently, there are many new vehicles equipped with level 1 and level 2 automation features. Mercedes offers an active brake assistance and night vision cameras with automated 3
4 danger warnings. On the other hand, there are no current car models with level 3 and level 4 automation features.self driving cars are still in a research state however we are already in the the stage of field tests with a few projected releases for the upcoming years. BMW 7 series enters and exits a garage without driver. Google tested a self driving experimental car that logged over 400,000 miles in a 15 month span where an average of 22.7 times a month a human driver had to take over as the robot car couldn t handle adjusting to various obstacles such bikes, branches, and other cars. Solution Design Using the design requirements as guidelines for our solution, our considered two solutions. Design 1, dubbed Android Car, is a design solution centered around using an Android smartphone to have a waypoint system for the RC car. Android Car is designed to be a level 4 autonomous system. From the Android smartphone, an application will determine your current location using a Google Maps API, ask for a destination and shall show you the path to your desired destination. Using a bluetooth module and Arduino microcontroller, the location information will be sent to the microcontroller (which will also have the motors of the RC connected to it as well) via bluetooth and the RC car shall follow the same path determined by the Android application. The solution will also incorporate the use of an ultrasonic distance sensor for collision prevention. Our 2nd Design, dubbed Car-On-Rails, is a design solution based on the idea of staying in your lane. Similarly to Android Car design, Car-On-Rails is another level 4 autonomous design. The car shall recognize on-street lane dividers on the left and right side of the vehicle and perfectly align the vehicle within the lane. The design will use multiple ultrasonic 4
5 distance sensors for collision prevention, a photoelectric sensor to determine the reflective lane dividers (median strips, reflective strips on traffic cones), as well as an Arduino microcontroller to take control of the motors of the vehicle. Below is our solution design matrix, in which our team puts both design in a head-to-head comparison regarding the monetary cost of the design, how much connectivity is required for the design to function, the user friendliness of the design, and the overall convenience of the design. View the solution design matrix below: Table 1: Solution Design Matrix Android Car (Design 1) Car-On-Rails (Design 2) 5
6 Weight (1-5) Score (1-5) Agg. Score Score (1-5) Agg Score. Cost Connectivity User Friendly Convenience Total Based on our solution design matrix, the Android Car design is the best solution to our problem. Our design includes: (1) Arduino microcontroller - embedded system; operates at 3.3V or 5V (2) bluetooth LE module - enables wireless data transmission and receiving for connected devices; operates at 3.3V (3) 2 DC motors - enables whiles to move in a rotating motion; operates at 5V (4) ultrasonic distance sensor - enables object detection from a range of 2cm to 4m; operates at 5V (5) 2 2N7000 MOSFET devices - enables microcontroller to control DC motors 6








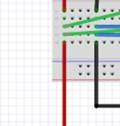
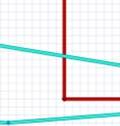
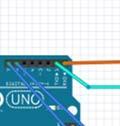



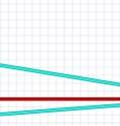










7 (6) 12kW/hr battery - DC output of 5V via USB Omitted from the schematic is the Android smartphone with the custom Android application. Below is a overview of our design solution: Figure 1: Schematic Design 7
8 Project Implementation Plan Mont h Week No Tasks Member in Charge Monthly Deliverables Jan 1 Winter Break Blueprint of 2 Draft designs for car Lateef/T car and avares psudeocode 3 Start psuedocode for all components of car C/J ordan 4 Learn how to use MIT app inventor Jordan/C Feb 1 Begin setting up phone UI for GPS jordan/c 2 Solder components to breadboards Lateef/T avares Car built 3 Organize components on RC car Lateef/T avares 4 Finish assembling car Lateef/T avares Mar 1 Write code for LCD display and compass jordan/c 2 Write code for GPS and navigation jordan/c Code Finished 3 Write code for sensors and remaining functions jordan/c 4 Test code and make adjustments jordan/c Apr 1 Final Testing Lateef Autonomous toy 2 Project Demo + Presentation Event car 3 4 8
9 Project Implementation Process Over the course of the semester we were able to follow our project implementation plan fairly well. The first two months of our work focused heavily on hardware components and assembling the car. We were able to successfully test all the hardware components and sensors individually. Once we confirmed there weren t any issues with the individual performances of the components, the schematic was drawn up and soldering of the components began. While the majority of the work was hardware based, the software was still being developed. Using MIT App Inventor, we were able to design the layout of our app. Additionally, we began to research different methods and implementations of transmitting data via bluetooth from phone to arduino. During March, we saw the formation of several problems on both the hardware and software side. For hardware, we found that the motors may not have been receiving enough power to make the car move. Additionally, the app wasn t connecting with the bluetooth module to transfer data; nor was the full arduino program ready to receive said data and store it correctly. Due to these unforeseen issues, our development took a significant delay. We decided to focus on developing necessary components and leave the LCD display to be integrated at a later date. The motors and bluetooth connectivity had to be finished before the project could move on to any other steps. The next two weeks of April were witness to different designs, trial and error, development of code and many small successes. We finally were able to provide enough power to the motors to get them to turn when the ultrasonic sensor detected an object in its path. Our 9
10 application could successfully connect with the bluetooth module after modifying the code to work with our specific module, which is low energy. Although it connected, data still wasn t being properly transmitted and development continued. The final application we presented could transmit the GPS coordinates to the BLE module; however, the data would be converted to IEEE 754 floating point numbers which wouldn t be converted back to the correct decimal when received by the arduino. For future development of this project, the arduino code needs to be modified to convert the data from IEEE 754 to decimal and correctly use that in our navigation algorithm. On the hardware side, the motor still needs additional power to fully rotate the tires and the LCD display has to be integrated. Conclusion Team AutoMoe s goal of developing an autonomous car with an embedded system and additional peripherals was achieved however without restrictions. By implementing an arduino logical program designed to read peripheral(i.e sensor) data to avoid obstacles in conjunction with hard wired as well as software connections to the motor we created our implementation of an autonomous vehicle. Our vehicle was aware of of surroundings as its sensors indicate solid objects in addition to having connectivity with the app in regards to current gps location. Our goal for the academic school year was to deliver an autonomous RC car with level 4 autonomy that can reach a waypoint while also detecting and avoid objects.: We observed that a substantial amount of power is required to power our vehicle compared to our initial total voltage of 5V. A greater power supply will allow the drive motor to get enough voltage while the sensors are powered ass well.the full scope of the project would be to find a large enough power supply to and the next phase would be to add additional sensors such as heat and kill switch 10
11 features to ensure a safer product. The final stage of Team AutoMoe s vehicle would be to integrate the toy car system into a fully sized vehicle and scale up the implementation respectively. References
Cilantro. Old Dominion University. Team Members:
 Cilantro Old Dominion University Faculty Advisor: Dr. Lee Belfore Team Captain: Michael Micros lbelfore@odu.edu mmicr001@odu.edu Team Members: Ntiana Sakioti Matthew Phelps Christian Lurhakumbira nsaki001@odu.edu
Cilantro Old Dominion University Faculty Advisor: Dr. Lee Belfore Team Captain: Michael Micros lbelfore@odu.edu mmicr001@odu.edu Team Members: Ntiana Sakioti Matthew Phelps Christian Lurhakumbira nsaki001@odu.edu
Deep Learning Will Make Truly Self-Driving Cars a Reality
 Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Autonomously Controlled Front Loader Senior Project Proposal
 Autonomously Controlled Front Loader Senior Project Proposal by Steven Koopman and Jerred Peterson Submitted to: Dr. Schertz, Dr. Anakwa EE 451 Senior Capstone Project December 13, 2007 Project Summary:
Autonomously Controlled Front Loader Senior Project Proposal by Steven Koopman and Jerred Peterson Submitted to: Dr. Schertz, Dr. Anakwa EE 451 Senior Capstone Project December 13, 2007 Project Summary:
Detailed Design Review
 Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
EcoCar3-ADAS. Project Plan. Summary. Why is This Project Important?
 EcoCar3-ADAS Project Plan Summary Scott Smith This project is the Advanced Driver Assistance System (ADAS) of the 2015-2016 Senior Design for the EcoCar3. This will be an embedded system for the EcoCar3
EcoCar3-ADAS Project Plan Summary Scott Smith This project is the Advanced Driver Assistance System (ADAS) of the 2015-2016 Senior Design for the EcoCar3. This will be an embedded system for the EcoCar3
Problem Definition Review
 Problem Definition Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team Agenda Background Problem Statement Stakeholders Use Scenario Customer Requirements Engineering Requirements Preliminary Schedule
Problem Definition Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team Agenda Background Problem Statement Stakeholders Use Scenario Customer Requirements Engineering Requirements Preliminary Schedule
2016 IGVC Design Report Submitted: May 13, 2016
 2016 IGVC Design Report Submitted: May 13, 2016 I certify that the design and engineering of the vehicle by the current student team has been significant and equivalent to what might be awarded credit
2016 IGVC Design Report Submitted: May 13, 2016 I certify that the design and engineering of the vehicle by the current student team has been significant and equivalent to what might be awarded credit
Syllabus: Automated, Connected, and Intelligent Vehicles
 Page 1 of 8 Syllabus: Automated, Connected, and Intelligent Vehicles Part 1: Course Information Description: Automated, Connected, and Intelligent Vehicles is an advanced automotive technology course that
Page 1 of 8 Syllabus: Automated, Connected, and Intelligent Vehicles Part 1: Course Information Description: Automated, Connected, and Intelligent Vehicles is an advanced automotive technology course that
INTRODUCTION Team Composition Electrical System
 IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
Caliber: Road Quality Profiling
 Caliber: Road Quality Profiling Capstone Design Specification Samuel Quintana John Spencer James Uttaro Damien Hobday CSc 59866 : Senior Design Professor: Jie Wei Brief Team Caliber wants to map the quality
Caliber: Road Quality Profiling Capstone Design Specification Samuel Quintana John Spencer James Uttaro Damien Hobday CSc 59866 : Senior Design Professor: Jie Wei Brief Team Caliber wants to map the quality
ROBOTAXI CONTEST TERMS AND CONDITIONS
 ROBOTAXI CONTEST TERMS AND CONDITIONS 1. Purpose Autonomous vehicles are no longer imaginary concepts as they were depicted in the 90s science fiction series. Today, many technology companies are conducting
ROBOTAXI CONTEST TERMS AND CONDITIONS 1. Purpose Autonomous vehicles are no longer imaginary concepts as they were depicted in the 90s science fiction series. Today, many technology companies are conducting
The Lug-n-Go. Team #16: Anika Manzo ( ammanzo2), Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018
, Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018") The Lug-n-Go Team #16: Anika Manzo ( ammanzo2), Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018 TA: Mickey Zhang Introduction 1.1 Problem Statement and Objective
The Lug-n-Go Team #16: Anika Manzo ( ammanzo2), Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018 TA: Mickey Zhang Introduction 1.1 Problem Statement and Objective
EV 2.0 Conversion of a Series Hybrid Vehicle to an Electric Vehicle
 EV 2.0 Conversion of a Series Hybrid Vehicle to an Electric Vehicle GOODNESS FOWORA IKENNA ONYENZE ARINZE UDEH OLANIYI NAFIU Department of Electrical Engineering and Computer Science (EECS) Advisor Dr.
EV 2.0 Conversion of a Series Hybrid Vehicle to an Electric Vehicle GOODNESS FOWORA IKENNA ONYENZE ARINZE UDEH OLANIYI NAFIU Department of Electrical Engineering and Computer Science (EECS) Advisor Dr.
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF
 AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
AC : USE OF POWER WHEELS CAR TO ILLUSTRATE ENGI- NEERING PRINCIPLES
 AC 2011-2029: USE OF POWER WHEELS CAR TO ILLUSTRATE ENGI- NEERING PRINCIPLES Dr. Howard Medoff, Pennsylvania State University, Ogontz Campus Associate Professor of Engineering, Penn State Abington Research
AC 2011-2029: USE OF POWER WHEELS CAR TO ILLUSTRATE ENGI- NEERING PRINCIPLES Dr. Howard Medoff, Pennsylvania State University, Ogontz Campus Associate Professor of Engineering, Penn State Abington Research
Preliminary Design Report. Project Title: Lunabot
 EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 30 January 2012 Project Title: Lunabot Team Name: UF Lunabotics Team Members: Name: Matt Morgan Name: UF Lunabotics Team
EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 30 January 2012 Project Title: Lunabot Team Name: UF Lunabotics Team Members: Name: Matt Morgan Name: UF Lunabotics Team
RB-Mel-03. SCITOS G5 Mobile Platform Complete Package
 RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
WHITE PAPER Autonomous Driving A Bird s Eye View
 WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE. CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development
 AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
Stereo-vision for Active Safety
 Stereo-vision for Active Safety Project within Vehicle and Traffic Safety, 2009-00078 Author: Vincent Mathevon (Autoliv Electronics AB) Ola Bostrom (Autoliv Development AB) Date: 2012-06-07 Content 1.
Stereo-vision for Active Safety Project within Vehicle and Traffic Safety, 2009-00078 Author: Vincent Mathevon (Autoliv Electronics AB) Ola Bostrom (Autoliv Development AB) Date: 2012-06-07 Content 1.
THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA.
 GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
I think the self-driving car can really dramatically improve the quality of life for everyone, Google co-founder Sergei Brin said.
 Article of the Week # 1 California Paves the Way for Driverless Cars The Washington Post Nobody s driving: California governor signs legislation paving the way for driverless cars By Associated Press,
Article of the Week # 1 California Paves the Way for Driverless Cars The Washington Post Nobody s driving: California governor signs legislation paving the way for driverless cars By Associated Press,
SAFE DRIVING USING MOBILE PHONES
 SAFE DRIVING USING MOBILE PHONES PROJECT REFERENCE NO. : 37S0527 COLLEGE : SKSVMA COLLEGE OF ENGINEERING AND TECHNOLOGY, GADAG BRANCH : COMPUTER SCIENCE AND ENGINEERING GUIDE : NAGARAJ TELKAR STUDENTS
SAFE DRIVING USING MOBILE PHONES PROJECT REFERENCE NO. : 37S0527 COLLEGE : SKSVMA COLLEGE OF ENGINEERING AND TECHNOLOGY, GADAG BRANCH : COMPUTER SCIENCE AND ENGINEERING GUIDE : NAGARAJ TELKAR STUDENTS
Application of Autonomous Vehicle Technology to Public Transit
 Application of Autonomous Vehicle Technology to Public Transit University Transportation Research Center 2014 Ground Transportation Technology Symposium November 19, 2014 Jerome M. Lutin, Ph.D., P.E. Senior
Application of Autonomous Vehicle Technology to Public Transit University Transportation Research Center 2014 Ground Transportation Technology Symposium November 19, 2014 Jerome M. Lutin, Ph.D., P.E. Senior
Opportunities to Leverage Advances in Driverless Car Technology to Evolve Conventional Bus Transit Systems
 Opportunities to Leverage Advances in Driverless Car Technology to Evolve Conventional Bus Transit Systems Podcar City 7 Symposium Emerging Transportation Technologies R&D George Mason University, October
Opportunities to Leverage Advances in Driverless Car Technology to Evolve Conventional Bus Transit Systems Podcar City 7 Symposium Emerging Transportation Technologies R&D George Mason University, October
Applicability for Green ITS of Heavy Vehicles by using automatic route selection system
 Applicability for Green ITS of Heavy Vehicles by using automatic route selection system Hideyuki WAKISHIMA *1 1. CTI Enginnering Co,. Ltd. 3-21-1 Nihonbashi-Hamacho, Chuoku, Tokyo, JAPAN TEL : +81-3-3668-4698,
Applicability for Green ITS of Heavy Vehicles by using automatic route selection system Hideyuki WAKISHIMA *1 1. CTI Enginnering Co,. Ltd. 3-21-1 Nihonbashi-Hamacho, Chuoku, Tokyo, JAPAN TEL : +81-3-3668-4698,
M:2:I Milestone 2 Final Installation and Ground Test
 Iowa State University AerE 294X/AerE 494X Make to Innovate M:2:I Milestone 2 Final Installation and Ground Test Author(s): Angie Burke Christopher McGrory Mitchell Skatter Kathryn Spierings Ryan Story
Iowa State University AerE 294X/AerE 494X Make to Innovate M:2:I Milestone 2 Final Installation and Ground Test Author(s): Angie Burke Christopher McGrory Mitchell Skatter Kathryn Spierings Ryan Story
Journal of Emerging Trends in Computing and Information Sciences
 Pothole Detection Using Android Smartphone with a Video Camera 1 Youngtae Jo *, 2 Seungki Ryu 1 Korea Institute of Civil Engineering and Building Technology, Korea E-mail: 1 ytjoe@kict.re.kr, 2 skryu@kict.re.kr
Pothole Detection Using Android Smartphone with a Video Camera 1 Youngtae Jo *, 2 Seungki Ryu 1 Korea Institute of Civil Engineering and Building Technology, Korea E-mail: 1 ytjoe@kict.re.kr, 2 skryu@kict.re.kr
TechniCity Final Project: An Urban Parking Solution for Columbus, OH
 TechniCity Final Project: An Urban Parking Solution for Columbus, OH By: Edgar Zebulan Ables 1. Topic: Every city faces parking issues as it grows. Columbus, Ohio is no different. This project explores
TechniCity Final Project: An Urban Parking Solution for Columbus, OH By: Edgar Zebulan Ables 1. Topic: Every city faces parking issues as it grows. Columbus, Ohio is no different. This project explores
CSE 352: Self-Driving Cars. Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark
 CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
Self-Driving RC-Car. Doke Akshay M 1, Shinde Vishal R 2, Kumbhar Mangesh R 3 Rai Nishant 4, Prof S. B. Bhosale 5
 Self-Driving RC-Car Doke Akshay M 1, Shinde Vishal R 2, Kumbhar Mangesh R 3 Rai Nishant 4, Prof S. B. Bhosale 5 1,2,3 UG Scholar, Dept. of Computer Engineering, JCOE, Pune (India) 4Assist. Professor Dept.
Self-Driving RC-Car Doke Akshay M 1, Shinde Vishal R 2, Kumbhar Mangesh R 3 Rai Nishant 4, Prof S. B. Bhosale 5 1,2,3 UG Scholar, Dept. of Computer Engineering, JCOE, Pune (India) 4Assist. Professor Dept.
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
ZEPHYR FAQ. Table of Contents
 Table of Contents General Information What is Zephyr? What is Telematics? Will you be tracking customer vehicle use? What precautions have Modus taken to prevent hacking into the in-car device? Is there
Table of Contents General Information What is Zephyr? What is Telematics? Will you be tracking customer vehicle use? What precautions have Modus taken to prevent hacking into the in-car device? Is there
Intelligent Drive next LEVEL
 Daimler AG Dr. Eberhard Zeeb Senior Manager Function and Software Driver Assistance Systems Intelligent Drive next LEVEL on the way towards autonomous driving Pioneers of the Automobile Bertha Benz 1888
Daimler AG Dr. Eberhard Zeeb Senior Manager Function and Software Driver Assistance Systems Intelligent Drive next LEVEL on the way towards autonomous driving Pioneers of the Automobile Bertha Benz 1888
An Introduction to Automated Vehicles
 An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
GCAT. University of Michigan-Dearborn
 GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
Dr. Charles Kim. EcoCar Team 2 (R.E.V)
") EECE 401 Senior Design I Department of Electrical and Computer Engineering Howard University Dr. Charles Kim EcoCar Team 2 (R.E.V) Katrelle Jones, Seitu Brathwaite, Tarik Wright, Derrick Rumbolt, D Angelo
EECE 401 Senior Design I Department of Electrical and Computer Engineering Howard University Dr. Charles Kim EcoCar Team 2 (R.E.V) Katrelle Jones, Seitu Brathwaite, Tarik Wright, Derrick Rumbolt, D Angelo
Autonomous Driving by Audi. Dr. Miklós Kiss
 Autonomous Driving by Audi Dr. Miklós Kiss Milestones in future mobility Digitalisation Urbanisation Sustainability Piloted driving as an influence on megatrends 1 Enhanced safety 3 More comfort for the
Autonomous Driving by Audi Dr. Miklós Kiss Milestones in future mobility Digitalisation Urbanisation Sustainability Piloted driving as an influence on megatrends 1 Enhanced safety 3 More comfort for the
Princess Sumaya University for Technology
 IGVC2014-E500 Princess Sumaya University for Technology Hamza Al-Beeshawi, Enas Al-Zmaili Raghad Al-Harasis, Moath Shreim Jamille Abu Shash Faculty Name:Dr. Belal Sababha Email:b.sababha@psut.edu.jo I
IGVC2014-E500 Princess Sumaya University for Technology Hamza Al-Beeshawi, Enas Al-Zmaili Raghad Al-Harasis, Moath Shreim Jamille Abu Shash Faculty Name:Dr. Belal Sababha Email:b.sababha@psut.edu.jo I
Freescale Cup Competition. Abdulahi Abu Amber Baruffa Mike Diep Xinya Zhao. Author: Amber Baruffa
 Freescale Cup Competition The Freescale Cup is a global competition where student teams build, program, and race a model car around a track for speed. Abdulahi Abu Amber Baruffa Mike Diep Xinya Zhao The
Freescale Cup Competition The Freescale Cup is a global competition where student teams build, program, and race a model car around a track for speed. Abdulahi Abu Amber Baruffa Mike Diep Xinya Zhao The
PROJECT PROPOSAL FIRE FIGHTING ROBOT CHALLENGE THE ENGINEERS: SUBMITTED TO: SPONSORED BY: Micro Fire Extinguisher
 FIRE FIGHTING ROBOT CHALLENGE Micro Fire Extinguisher PROJECT PROPOSAL SUBMITTED TO: JOHN KENNEDY & R. LAL TUMMALA DESIGN CO. LTD, SAN DIEGO, CA SPONSORED BY: SAN DIEGO STATE UNIVERSITY SENIOR DESIGN PROJECT
FIRE FIGHTING ROBOT CHALLENGE Micro Fire Extinguisher PROJECT PROPOSAL SUBMITTED TO: JOHN KENNEDY & R. LAL TUMMALA DESIGN CO. LTD, SAN DIEGO, CA SPONSORED BY: SAN DIEGO STATE UNIVERSITY SENIOR DESIGN PROJECT
THE HIGHWAY-CHAUFFEUR
 Motivation: - Highway-Chauffeur as an example for a conditional automated driving function (SAE level 3) - Standard scenarios, critical scenarios and automation-risks are the basis to fill the scenariodatabase
Motivation: - Highway-Chauffeur as an example for a conditional automated driving function (SAE level 3) - Standard scenarios, critical scenarios and automation-risks are the basis to fill the scenariodatabase
Status of the Informal Working Group on ACSF
 Submitted by the Chair of the IWG on ACSF Informal document GRVA-02-35 2 nd GRVA session, 28. Jan 01. Feb. 2019, Agenda item 5(d) Status of the Informal Working Group on ACSF Summary of ACSF IWG Meetings
Submitted by the Chair of the IWG on ACSF Informal document GRVA-02-35 2 nd GRVA session, 28. Jan 01. Feb. 2019, Agenda item 5(d) Status of the Informal Working Group on ACSF Summary of ACSF IWG Meetings
Initial Project and Group Identification Document. Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle)
") Initial Project and Group Identification Document Project Idea: Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle) Team Members: Robertson Augustine (Computer Engineer)
Initial Project and Group Identification Document Project Idea: Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle) Team Members: Robertson Augustine (Computer Engineer)
Automatic Braking and Control for New Generation Vehicles
 Automatic Braking and Control for New Generation Vehicles Absal Nabi Assistant Professor,EEE Department Ilahia College of Engineering & Technology absalnabi@gmail.com +919447703238 Abstract- To develop
Automatic Braking and Control for New Generation Vehicles Absal Nabi Assistant Professor,EEE Department Ilahia College of Engineering & Technology absalnabi@gmail.com +919447703238 Abstract- To develop
Festival Nacional de Robótica - Portuguese Robotics Open. Rules for Autonomous Driving. Sociedade Portuguesa de Robótica
 Festival Nacional de Robótica - Portuguese Robotics Open Rules for Autonomous Driving Sociedade Portuguesa de Robótica 2017 Contents 1 Introduction 1 2 Rules for Robot 2 2.1 Dimensions....................................
Festival Nacional de Robótica - Portuguese Robotics Open Rules for Autonomous Driving Sociedade Portuguesa de Robótica 2017 Contents 1 Introduction 1 2 Rules for Robot 2 2.1 Dimensions....................................
CT6 SUPER CRUISE Convenience & Personalization Guide. cadillac.com
 2018 CT6 SUPER CRUISE Convenience & Personalization Guide cadillac.com Review this guide for an overview of the Super Cruise system in your Cadillac CT6. Your complete attention is required at all times
2018 CT6 SUPER CRUISE Convenience & Personalization Guide cadillac.com Review this guide for an overview of the Super Cruise system in your Cadillac CT6. Your complete attention is required at all times
Steering Actuator for Autonomous Driving and Platooning *1
 TECHNICAL PAPER Steering Actuator for Autonomous Driving and Platooning *1 A. ISHIHARA Y. KUROUMARU M. NAKA The New Energy and Industrial Technology Development Organization (NEDO) is running a "Development
TECHNICAL PAPER Steering Actuator for Autonomous Driving and Platooning *1 A. ISHIHARA Y. KUROUMARU M. NAKA The New Energy and Industrial Technology Development Organization (NEDO) is running a "Development
Electrics/electronics Technology Workshop Cayenne
 Electrics/electronics Technology Workshop Cayenne Porsche Advanced Cockpit Instrument cluster with two 7 displays and central analog rev counter Porsche Communication Management (PCM) with online navigation
Electrics/electronics Technology Workshop Cayenne Porsche Advanced Cockpit Instrument cluster with two 7 displays and central analog rev counter Porsche Communication Management (PCM) with online navigation
Activity-Travel Behavior Impacts of Driverless Cars
 January 12-16, 2014; Washington, D.C. 93 rd Annual Meeting of the Transportation Research Board Activity-Travel Behavior Impacts of Driverless Cars Ram M. Pendyala 1 and Chandra R. Bhat 2 1 School of Sustainable
January 12-16, 2014; Washington, D.C. 93 rd Annual Meeting of the Transportation Research Board Activity-Travel Behavior Impacts of Driverless Cars Ram M. Pendyala 1 and Chandra R. Bhat 2 1 School of Sustainable
Autonomous Automated and Connected Vehicles
 Autonomous Automated and Connected Vehicles February 25, 2015 Bernard C. Soriano, Ph.D. Deputy Director, California DMV California Legislation Senate Bill 1298 As soon as practicable, but no later than
Autonomous Automated and Connected Vehicles February 25, 2015 Bernard C. Soriano, Ph.D. Deputy Director, California DMV California Legislation Senate Bill 1298 As soon as practicable, but no later than
Detection of rash driving on highways
 Detection of rash driving on highways 1 Ladly Patel, 2 Kumar Abhishek Gaurav, 3 Dr. Revathi V 1,2 Mtech. CSE (Big Data & IoT), 3 Associate Professor Dayananda Sagar University, Bengaluru, India Abstract-
Detection of rash driving on highways 1 Ladly Patel, 2 Kumar Abhishek Gaurav, 3 Dr. Revathi V 1,2 Mtech. CSE (Big Data & IoT), 3 Associate Professor Dayananda Sagar University, Bengaluru, India Abstract-
Design and development of mobile service for ecodriving
 Design and development of mobile service for ecodriving Guillaume Saint Pierre Olivier Orfila Mickael Messias Séminaire SERRES Lyon, 22/03/2013 Co-financed by www.ecodriver-project.eu 2 Introduction Efficient
Design and development of mobile service for ecodriving Guillaume Saint Pierre Olivier Orfila Mickael Messias Séminaire SERRES Lyon, 22/03/2013 Co-financed by www.ecodriver-project.eu 2 Introduction Efficient
Cooperative brake technology
 Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
Case 1:17-cv DLF Document 16 Filed 04/06/18 Page 1 of 2 IN THE UNITED STATES DISTRICT COURT FOR THE DISTRICT OF COLUMBIA
 Case 1:17-cv-01266-DLF Document 16 Filed 04/06/18 Page 1 of 2 IN THE UNITED STATES DISTRICT COURT FOR THE DISTRICT OF COLUMBIA QUALITY CONTROL SYSTEMS CORP., Plaintiff, v. Civil Action No. 17-01266 (DLF
Case 1:17-cv-01266-DLF Document 16 Filed 04/06/18 Page 1 of 2 IN THE UNITED STATES DISTRICT COURT FOR THE DISTRICT OF COLUMBIA QUALITY CONTROL SYSTEMS CORP., Plaintiff, v. Civil Action No. 17-01266 (DLF
Financial Planning Association of Michigan 2018 Fall Symposium Autonomous Vehicles Presentation
 Financial Planning Association of Michigan 2018 Fall Symposium Autonomous s Presentation 1 Katherine Ralston Program Manager, Autonomous s 2 FORD SECRET Why Autonomous s Societal Impact Great potential
Financial Planning Association of Michigan 2018 Fall Symposium Autonomous s Presentation 1 Katherine Ralston Program Manager, Autonomous s 2 FORD SECRET Why Autonomous s Societal Impact Great potential
CT6 SUPER CRUISE Convenience & Personalization Guide. cadillac.com
 2018 CT6 SUPER CRUISE Convenience & Personalization Guide cadillac.com Review this guide for an overview of the Super Cruise system in your CT6. Your complete attention is required at all times while driving,
2018 CT6 SUPER CRUISE Convenience & Personalization Guide cadillac.com Review this guide for an overview of the Super Cruise system in your CT6. Your complete attention is required at all times while driving,
A Vision for Highway Automation
 A Vision for Highway Automation R y a n D. R i c e D i r e c t o r o f M o b i l i t y O p e r a t i o n s C o l o r a d o D e p a r t m e n t o f T r a n s p o r t a t i o n Problem Statement Higher
A Vision for Highway Automation R y a n D. R i c e D i r e c t o r o f M o b i l i t y O p e r a t i o n s C o l o r a d o D e p a r t m e n t o f T r a n s p o r t a t i o n Problem Statement Higher
Solar Kit Lesson #13 Solarize a Toy
 UCSD TIES adapted from NYSERDA Energy Smart www.schoolpowernaturally.org Solar Kit Lesson #13 Solarize a Toy TEACHER INFORMATION LEARNING OUTCOME After designing and constructing solar electric power sources
UCSD TIES adapted from NYSERDA Energy Smart www.schoolpowernaturally.org Solar Kit Lesson #13 Solarize a Toy TEACHER INFORMATION LEARNING OUTCOME After designing and constructing solar electric power sources
China Intelligent Connected Vehicle Technology Roadmap 1
 China Intelligent Connected Vehicle Technology Roadmap 1 Source: 1. China Automotive Engineering Institute, , Oct. 2016 1 Technology Roadmap 1 General
China Intelligent Connected Vehicle Technology Roadmap 1 Source: 1. China Automotive Engineering Institute, , Oct. 2016 1 Technology Roadmap 1 General
Regeneration of the Particulate Filter by Using Navigation Data
 COVER STORY EXHAUST AFTERTREATMENT Regeneration of the Particulate Filter by Using Navigation Data Increasing connectivity is having a major effect on the driving experience as well as on the car s inner
COVER STORY EXHAUST AFTERTREATMENT Regeneration of the Particulate Filter by Using Navigation Data Increasing connectivity is having a major effect on the driving experience as well as on the car s inner
Autonomyof vehicles. Prof. dr. Jernej Klemenc, dr. Simon Oman
 Autonomyof vehicles Prof. dr. Jernej Klemenc, dr. Simon Oman 12. Julij 2018 Content Sensors and ICT (information communication technology) Data processing -identification of traffic signalization and various
Autonomyof vehicles Prof. dr. Jernej Klemenc, dr. Simon Oman 12. Julij 2018 Content Sensors and ICT (information communication technology) Data processing -identification of traffic signalization and various
Connected Vehicles. V2X technology.
 EN Kapsch TrafficCom Connected Vehicles. V2X technology. Cooperative Intelligent Transportation Systems (C-ITS) are based on the communication between vehicles and infrastructure (V2I, or vehicle to infrastructure
EN Kapsch TrafficCom Connected Vehicles. V2X technology. Cooperative Intelligent Transportation Systems (C-ITS) are based on the communication between vehicles and infrastructure (V2I, or vehicle to infrastructure
Project Proposal for Autonomous Vehicle
 Project Proposal for Autonomous Vehicle Group Members: Ramona Cone Erin Cundiff Project Advisors: Dr. Huggins Dr. Irwin Mr. Schmidt 12/12/02 Project Summary The autonomous vehicle uses an EMAC based system
Project Proposal for Autonomous Vehicle Group Members: Ramona Cone Erin Cundiff Project Advisors: Dr. Huggins Dr. Irwin Mr. Schmidt 12/12/02 Project Summary The autonomous vehicle uses an EMAC based system
Project. Final Report. Prepared for: Dr. Marco Tacca and Dr. Leo Estevez. Prepared by: Heather Thomas. Team Ψ
 Project Final Report Prepared for: Dr. Marco Tacca and Dr. Leo Estevez Prepared by: Heather Thomas Team Ψ T E A M Ψ : E - B I K E F i n a l R e p o r t P a g e 1 TABLE OF CONTENTS ABSTRACT.. (2) BACKGROUND/INTRODUCTION.
Project Final Report Prepared for: Dr. Marco Tacca and Dr. Leo Estevez Prepared by: Heather Thomas Team Ψ T E A M Ψ : E - B I K E F i n a l R e p o r t P a g e 1 TABLE OF CONTENTS ABSTRACT.. (2) BACKGROUND/INTRODUCTION.
The Environment. The Environment
 Based on its slogan of "Protecting lives, Preserving the planet, and Preparing a bright future for generations to come," DENSO is engaged in the mission of solving the environmental and safety issues automotive
Based on its slogan of "Protecting lives, Preserving the planet, and Preparing a bright future for generations to come," DENSO is engaged in the mission of solving the environmental and safety issues automotive
Project Report Cover Page
 New York State Pollution Prevention Institute R&D Program 2015-2016 Student Competition Project Report Cover Page University/College Name Team Name Team Member Names SUNY Buffalo UB-Engineers for a Sustainable
New York State Pollution Prevention Institute R&D Program 2015-2016 Student Competition Project Report Cover Page University/College Name Team Name Team Member Names SUNY Buffalo UB-Engineers for a Sustainable
GNEG 1103 Introduction to Engineering Spring Assignment. Team Design Project. Selected Topic. Electric Boat. Team Members.
 Course 1 GNEG 1103 Introduction to Engineering Spring 2015 Assignment Team Design Project Selected Topic Electric Boat Team Members Alex Bonin Mario Diaz Instructor Dr. A. Stratigakis 2 Abstract As a team
Course 1 GNEG 1103 Introduction to Engineering Spring 2015 Assignment Team Design Project Selected Topic Electric Boat Team Members Alex Bonin Mario Diaz Instructor Dr. A. Stratigakis 2 Abstract As a team
A Presentation on. Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing
 in autonomous vehicles for alerting driver during overtaking and lane changing") A Presentation on Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing Presented By: Abhishek Shriram Umachigi Department of Electrical Engineering
A Presentation on Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing Presented By: Abhishek Shriram Umachigi Department of Electrical Engineering
FREQUENTLY ASKED QUESTIONS
 FREQUENTLY ASKED QUESTIONS THE MOBILEYE SYSTEM Mobileye is a collision avoidance system that alerts drivers to potentially dangerous situations. However, the system does not replace any functions drivers
FREQUENTLY ASKED QUESTIONS THE MOBILEYE SYSTEM Mobileye is a collision avoidance system that alerts drivers to potentially dangerous situations. However, the system does not replace any functions drivers
used only in conjunction with university sponsored activities. Talking on cell phone or texting while driving are prohibited.
 Office of Risk Management VEHICLE USE AND VAN DRIVER SAFETY POLICY University vehicles include all fleet vehicles owned or leased by the university, as well as any vehicles purchased, leased, or rented
Office of Risk Management VEHICLE USE AND VAN DRIVER SAFETY POLICY University vehicles include all fleet vehicles owned or leased by the university, as well as any vehicles purchased, leased, or rented
Near-Term Automation Issues: Use Cases and Standards Needs
 Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
Centurion II Vehicle Design Report Bluefield State College
 Centurion II Vehicle Design Report Bluefield State College Ground Robotic Vehicle Team, May 2003 I, Dr. Robert Riggins,Professor of the Electrical Engineering Technology Department at Bluefield State College
Centurion II Vehicle Design Report Bluefield State College Ground Robotic Vehicle Team, May 2003 I, Dr. Robert Riggins,Professor of the Electrical Engineering Technology Department at Bluefield State College
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Maglev. Initial Project Description and Block Diagram. Julio Arias Sean Mawn William Schiller Leo Sell
 Maglev Initial Project Description and Block Diagram Julio Arias Sean Mawn William Schiller Leo Sell Project Description Magnetic levitation or otherwise known as maglev technology is a system where propulsion
Maglev Initial Project Description and Block Diagram Julio Arias Sean Mawn William Schiller Leo Sell Project Description Magnetic levitation or otherwise known as maglev technology is a system where propulsion
EB TechPaper. Staying in lane on highways with EB robinos. elektrobit.com
 EB TechPaper Staying in lane on highways with EB robinos elektrobit.com Highly automated driving (HAD) raises the complexity within vehicles tremendously due to many different components that need to be
EB TechPaper Staying in lane on highways with EB robinos elektrobit.com Highly automated driving (HAD) raises the complexity within vehicles tremendously due to many different components that need to be
Study on V2V-based AEB System Performance Analysis in Various Road Conditions at an Intersection
 , pp. 1-10 http://dx.doi.org/10.14257/ijseia.2015.9.7.01 Study on V2V-based AEB System Performance Analysis in Various Road Conditions at an Intersection Sangduck Jeon 1, Gyoungeun Kim 1 and Byeongwoo
, pp. 1-10 http://dx.doi.org/10.14257/ijseia.2015.9.7.01 Study on V2V-based AEB System Performance Analysis in Various Road Conditions at an Intersection Sangduck Jeon 1, Gyoungeun Kim 1 and Byeongwoo
Active Safety Systems in Cars -Many semi-automated safety features are available today in new cars. -Building blocks for automated cars in the future.
 Active Safety Systems in Cars -Many semi-automated safety features are available today in new cars. -Building blocks for automated cars in the future. Eugene A. Petersen Tire Program Manager-CR For over
Active Safety Systems in Cars -Many semi-automated safety features are available today in new cars. -Building blocks for automated cars in the future. Eugene A. Petersen Tire Program Manager-CR For over
RF Based Automatic Vehicle Speed Limiter by Controlling Throttle Valve
 RF Based Automatic Vehicle Speed Limiter by Controlling Throttle Valve Saivignesh H 1, Mohamed Shimil M 1, Nagaraj M 1, Dr.Sharmila B 2, Nagaraja pandian M 3 U.G. Student, Department of Electronics and
RF Based Automatic Vehicle Speed Limiter by Controlling Throttle Valve Saivignesh H 1, Mohamed Shimil M 1, Nagaraj M 1, Dr.Sharmila B 2, Nagaraja pandian M 3 U.G. Student, Department of Electronics and
GPS Robot Navigation Bi-Weekly Report 2/07/04-2/21/04. Chris Foley Kris Horn Richard Neil Pittman Michael Willis
 GPS Robot Navigation Bi-Weekly Report 2/07/04-2/21/04 Chris Foley Kris Horn Richard Neil Pittman Michael Willis GPS Robot Navigation Bi-Weekly Report 2/07/04-2/21/04 Goals for Two Week Period For the first
GPS Robot Navigation Bi-Weekly Report 2/07/04-2/21/04 Chris Foley Kris Horn Richard Neil Pittman Michael Willis GPS Robot Navigation Bi-Weekly Report 2/07/04-2/21/04 Goals for Two Week Period For the first
Cooperative Autonomous Driving and Interaction with Vulnerable Road Users
 9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
PRESS KIT TABLE OF CONTENTS
 PRESS KIT TABLE OF CONTENTS Ibeo Automotive from technology pioneer to the world s leading developer of automotive LiDAR systems page 1-3 Ibeo Automotive LiDAR Systems at the speed of light for autonomous
PRESS KIT TABLE OF CONTENTS Ibeo Automotive from technology pioneer to the world s leading developer of automotive LiDAR systems page 1-3 Ibeo Automotive LiDAR Systems at the speed of light for autonomous
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
UNIVERSITÉ DE MONCTON FACULTÉ D INGÉNIERIE. Moncton, NB, Canada PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY
 FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
Eco-Driving by Utilizing a Digital Tachograph System
 JCM Projects In Asia Eco-Driving by Utilizing a Digital Tachograph System Nippon Express Co., Ltd. March 19, 2015 Tokyo, Japan 0 Contents 1. About Nippon Express 2. Digital Tachograph System 3. Why Promote
JCM Projects In Asia Eco-Driving by Utilizing a Digital Tachograph System Nippon Express Co., Ltd. March 19, 2015 Tokyo, Japan 0 Contents 1. About Nippon Express 2. Digital Tachograph System 3. Why Promote
October 15, 2015 Traffic Engineering and Safety Conference Champaign, IL
 October 15, 2015 Traffic Engineering and Safety Conference Champaign, IL NHTSA defines vehicle automation as having five levels: No-Automation (Level 0): The driver is in complete and sole control of the
October 15, 2015 Traffic Engineering and Safety Conference Champaign, IL NHTSA defines vehicle automation as having five levels: No-Automation (Level 0): The driver is in complete and sole control of the
EVOLUTION OF MOBILITY: AUTONOMOUS VEHICLES
 EVOLUTION OF MOBILITY: AUTONOMOUS VEHICLES Passenger Miles Traveled Mass Adoption of Autonomous Vehicles is the Inflection Point for a Shift in Mobility 6 TODAY 4 0 % R E D U C T I O N I N C O N S U M
EVOLUTION OF MOBILITY: AUTONOMOUS VEHICLES Passenger Miles Traveled Mass Adoption of Autonomous Vehicles is the Inflection Point for a Shift in Mobility 6 TODAY 4 0 % R E D U C T I O N I N C O N S U M
K.I.T.T. KINEMATIC INTELLIGENT TACTICAL TECHNOLOGY
 4/4/2011 SVSU K.I.T.T. KINEMATIC INTELLIGENT TACTICAL TECHNOLOGY Team Members Bryant Barnes Addney Biery Paul List Matthew Plachta Advisor Russell Clark Faculty Advisor Statement I certify that the engineering
4/4/2011 SVSU K.I.T.T. KINEMATIC INTELLIGENT TACTICAL TECHNOLOGY Team Members Bryant Barnes Addney Biery Paul List Matthew Plachta Advisor Russell Clark Faculty Advisor Statement I certify that the engineering
WHITE PAPER. Preventing Collisions and Reducing Fleet Costs While Using the Zendrive Dashboard
 WHITE PAPER Preventing Collisions and Reducing Fleet Costs While Using the Zendrive Dashboard August 2017 Introduction The term accident, even in a collision sense, often has the connotation of being an
WHITE PAPER Preventing Collisions and Reducing Fleet Costs While Using the Zendrive Dashboard August 2017 Introduction The term accident, even in a collision sense, often has the connotation of being an
Eco-Signal Operations Concept of Operations
 Eco-Signal Operations Concept of Operations Applications for the Environment: Real-Time Information Synthesis (AERIS) Adapted from the Eco-Signal Operations Concept of Operations Document AERIS Operational
Eco-Signal Operations Concept of Operations Applications for the Environment: Real-Time Information Synthesis (AERIS) Adapted from the Eco-Signal Operations Concept of Operations Document AERIS Operational
Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts
 Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts Office of Analysis, Research, and Technology Federal Motor Carrier Safety Administration Managing Fatigue Conference Mar
Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts Office of Analysis, Research, and Technology Federal Motor Carrier Safety Administration Managing Fatigue Conference Mar
Tips & Technology For Bosch business partners
 Tips & Technology For Bosch business partners Current topics for successful workshops No. 70/2013 Electrics / Electronics Automated driving The future of mobility High-performance driver assistance systems
Tips & Technology For Bosch business partners Current topics for successful workshops No. 70/2013 Electrics / Electronics Automated driving The future of mobility High-performance driver assistance systems
WHAT DOES OUR AUTONOMOUS FUTURE LOOK LIKE?
 WHAT DOES OUR AUTONOMOUS FUTURE LOOK LIKE? The US Military sponsored 3 challenges to see if unmanned vehicles could navigate difficult off-road terrain ( Iraq type war effort?) In 2004, DARPA (Defense
WHAT DOES OUR AUTONOMOUS FUTURE LOOK LIKE? The US Military sponsored 3 challenges to see if unmanned vehicles could navigate difficult off-road terrain ( Iraq type war effort?) In 2004, DARPA (Defense
Beyond Autonomous Cars; Open Autonomous Vehicle Safety Competitions. Mike Cannon Boyd Wilson Clemson University & Omnibond
 Beyond Autonomous Cars; Open Autonomous Vehicle Safety Competitions Mike Cannon Boyd Wilson Clemson University & Omnibond Abstract By applying open collaborative concepts, to autonomous vehicle research,
Beyond Autonomous Cars; Open Autonomous Vehicle Safety Competitions Mike Cannon Boyd Wilson Clemson University & Omnibond Abstract By applying open collaborative concepts, to autonomous vehicle research,
ZF Advances Key Technologies for Automated Driving
 Page 1/5, January 9, 2017 ZF Advances Key Technologies for Automated Driving ZF s See Think Act supports self-driving cars and trucks ZF and NVIDIA provide computing power to bring artificial intelligence
Page 1/5, January 9, 2017 ZF Advances Key Technologies for Automated Driving ZF s See Think Act supports self-driving cars and trucks ZF and NVIDIA provide computing power to bring artificial intelligence
Name: Space Exploration PBL
 Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Oakland University Presents:
 Oakland University Presents: I certify that the engineering design present in this vehicle is significant and equivalent to work that would satisfy the requirements of a senior design or graduate project
Oakland University Presents: I certify that the engineering design present in this vehicle is significant and equivalent to work that would satisfy the requirements of a senior design or graduate project
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help?
 Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
Our Market and Sales Outlook
 Our Market and Sales Outlook Art Blanchford Executive Vice President Sales and Product Planning 1 Leading Market Position in Large and Rapid Growing Market Addressable Market including potential opportunity
Our Market and Sales Outlook Art Blanchford Executive Vice President Sales and Product Planning 1 Leading Market Position in Large and Rapid Growing Market Addressable Market including potential opportunity
Roy Hulli, P.Eng. and. Fernando Chua. Intelligent Transportation Systems Ministry of Transportation Ontario
 Roy Hulli, P.Eng and Fernando Chua Intelligent Transportation Systems Ministry of Transportation Ontario Smart Cities Data Connectivity Disruption Context of Change Automated Vehicles Monitoring by sensors
Roy Hulli, P.Eng and Fernando Chua Intelligent Transportation Systems Ministry of Transportation Ontario Smart Cities Data Connectivity Disruption Context of Change Automated Vehicles Monitoring by sensors