Problem Definition Review
|
|
|
- Jodie Fields
- 5 years ago
- Views:
Transcription

1 Problem Definition Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III
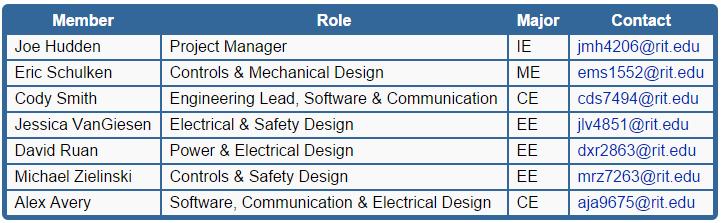
2 Team
3 Agenda Background Problem Statement Stakeholders Use Scenario Customer Requirements Engineering Requirements Preliminary Schedule Potential Risks
4 Background Rochester Institute of Technology is re-entering the field of autonomous vehicle research. Research and development of autonomous vehicles are becoming more and more popular in the automotive industry. It is believed that autonomous vehicles are the future for easy and efficient transportation that will make for safer, less congested roadways. Our project will follow the work completed by the Phase I and II teams.
5 Problem Statement RIT would like to showcase the capability of its engineering students by creating a fully functional autonomous vehicle. It is believed that self-driving vehicles are the future for easy, efficient transportation that will make for safer, less congested roadways and a cleaner environment. The Autonomous People Mover (APM) at RIT would provide transportation for students and visitors across the campus at a moment s notice. With the APM, no human driver is necessary. There have been two phases of this project so far. The first phase focused on modifying a golf cart into a remote controlled vehicle. The second phase is working on adding autonomous functionality to the APM for highly restricted settings. The goal of Phase III is to analyze the APM s current autonomous capabilities and to incorporate localization, path planning, path following, and object avoidance. The vehicle will provide a simple human-machine interface which will collect and display diagnostic information. To ensure the safety of the passengers and any bystanders, passengers will have the ability to take control of the vehicle at any time. The prototype will be showcased at Imagine RIT 2016 on a closed course with a trained backup driver on board for safety assurance.
6 Problem Statement Current State There have been two phases of this project so far. The first phase focused on modifying a golf cart into a remote controlled vehicle. The second phase is working on adding autonomous functionality to the APM in highly restricted settings. Desired State APM is capable of localization, path planning, path following, and object avoidance. APM provides a simple human-machine interface which displays diagnostic information. Passengers have the ability to take control of the vehicle whether it is moving or stationary. Project Goals APM can drive autonomously on a closed course while avoiding static and moving obstacles, staying on the designated path, and maintaining the safety of passengers and bystanders Constraints Phase II accomplishments; budget; time for research, testing, and debugging; maintaining the safety of passengers and bystanders


7 Stakeholders Primary Customer: Raymond Ptucha Faculty Guide: Michael Blachowicz RIT Passengers Bystanders Phase III Team Phase IV Team? D3 Engineering

8 Example Use Scenario
9 Customer Requirements Customer Rqmt. # Importance Description CR1 9 APM must, at a minimum, be able to operate within a closed course in autonomous mode CR2 9 APM must move forwards in autonomous mode CR3 9 APM must have intelligent vehicle control: driving CR4 9 APM must have intelligent vehicle control: steering CR5 9 APM must have intelligent vehicle control: braking CR6 6 APM must re-route path to avoid obstacle CR7 9 APM must be able to detect obstacles and brake CR8 3 APM must exhibit localization CR9 3 APM must have diagnostic data logging capability CR10 1 APM will have a display which will show it's location on a map, as well as diagnostic information CR11 9 APM destination must be input via Secure Shell Protocol (SSH) or remote desktop to the onboard PC CR12 9 APM must perform an emergency stop when a passenger hits the emergency stop button, or when the remote control device activates the emergency stop CR13 9 APM must have a way to switch between manual, remote, and autonomous modes
10 Engineering Requirements Rqmt. # Engr. Requirement (metric) Unit of Measure Marginal Value Ideal Value Comments/Status S1 Driving Modes (Manual, RC, Autonomous) Pass / Fail S2 Steering Control Precision Degrees ± 2 ± 1 S3 Steering Position Encoding Degrees ± 2 ± 1 S4 Speed Control MPH ± 1 (0.5) ± 0.5 (0.25) S5 Speed Encoding MPH ± 1 (0.5) ± 0.5 (0.25) S6 Maximum Speed MPH 10 (4.5) 12 (5.4) S7 GPS Positioning Meters ± 5 ± 0.25 S8 Course: Arrive at planned destination Pass / Fail S9 Course: Make turn when road turns Pass / Fail S10 Course: Stop when stationary obstacle in way Pass / Fail S11 Course: Stop when moving obstacle moves in way Pass / Fail S12 Course: Slow down when approaching turn and speed up again after Pass / Fail S13 Drive Forward Autonomously Pass / Fail S14 Detection of Light Reflecting 10" x 10" Objects Within 3 Meters Percentage degrees in front of car S15 Detection of Sound Reflecting 1' x 1' Objects Within 1 Meter Percentage degrees in front of car S16 Minimum Stopping Distance (without hitting obstacle) Meters 5 3 S17 SSH Interface with onboard PC Pass / Fail
11 Engineering Requirements vs. Customer Requirements Customer Weights S1 S2 S3 S4 S5 S6 S7 S8 S9 S10 S11 S12 S13 S14 S15 S16 S17 Customer Requirements CR1 9 X X X X X X X X X X X X X X CR2 9 X X X X X CR3 9 X X X X X X X X X X CR4 9 X X X X X X CR5 9 X X X X X X X CR6 6 X X X X X X CR7 9 X X X X CR8 3 X X CR9 3 X X X CR10 1 X X X CR11 9 X CR12 9 X X CR13 9 X
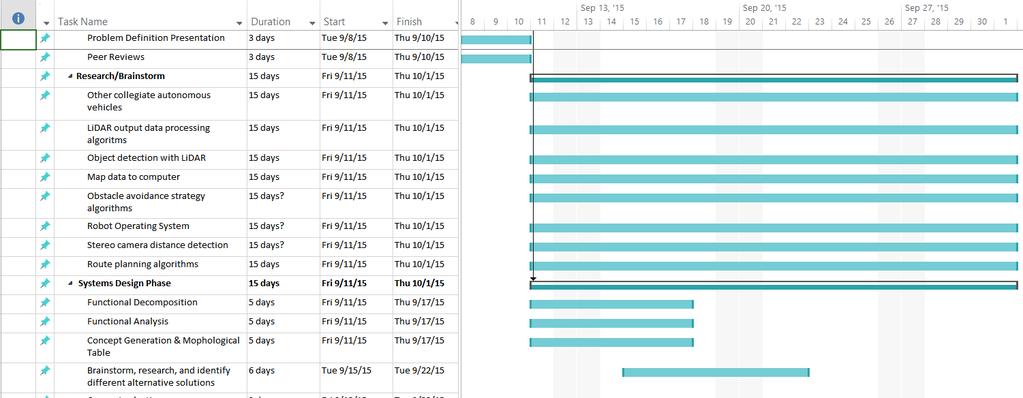
12 Preliminary Schedule
13 Potential Risks Phase II not completing requirements Control system physically failing Steering Brake Throttle Sensor Malfunction LiDAR Ultrasonics Visual cameras GPS Physical Vehicle Malfunction Damage to cart Flat tire Brakes locked out Algorithm Failure Path planning Obstacle avoidance
14 Potential Risks Continued Weather Issues Daylight Snow/Ice Rain Heat Computer Failure Bandwidth issues Processing too slow Software bugs Malicious Actions Passenger Bystander
15 Questions
Detailed Design Review
 Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
Autonomous People Mover P15241
 Autonomous People Mover P15241 Team Members: Nick Bovee, Pat Gelose, Katie Knowles, Due Lee, Keith Martin, Mollie Pressman, and Jonathan Zimmermann Project Guild: Dr. Rick Lux Project Customer: Dr. Raymond
Autonomous People Mover P15241 Team Members: Nick Bovee, Pat Gelose, Katie Knowles, Due Lee, Keith Martin, Mollie Pressman, and Jonathan Zimmermann Project Guild: Dr. Rick Lux Project Customer: Dr. Raymond
P15318: Gaseous Mass Flow Rate Controller
 P15318: Gaseous Mass Flow Rate Controller B R I A N C H U R C H A N T H O N Y S A L M I N T Y L E R B R E I T U N G R O S S B L U T H M I C H A E L O P L I N G E R S T E P H E N M R O Z P15318 Introduction
P15318: Gaseous Mass Flow Rate Controller B R I A N C H U R C H A N T H O N Y S A L M I N T Y L E R B R E I T U N G R O S S B L U T H M I C H A E L O P L I N G E R S T E P H E N M R O Z P15318 Introduction
Initial Project and Group Identification Document. Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle)
") Initial Project and Group Identification Document Project Idea: Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle) Team Members: Robertson Augustine (Computer Engineer)
Initial Project and Group Identification Document Project Idea: Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle) Team Members: Robertson Augustine (Computer Engineer)
Deep Learning Will Make Truly Self-Driving Cars a Reality
 Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Our Approach to Automated Driving System Safety. February 2019
 Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
P15044 Intelligent Mobility Cane
 P15044 Intelligent Mobility Cane Name Major Role Allan Andranikian ME Lead Engineer Andrew Greeley ME Vibrations Lead Ben Stewart EE Sensors Lead Dan Chianucci CE Controls Lead Justine Nichols IE Project
P15044 Intelligent Mobility Cane Name Major Role Allan Andranikian ME Lead Engineer Andrew Greeley ME Vibrations Lead Ben Stewart EE Sensors Lead Dan Chianucci CE Controls Lead Justine Nichols IE Project
GPS Robot Navigation Bi-Weekly Report 2/07/04-2/21/04. Chris Foley Kris Horn Richard Neil Pittman Michael Willis
 GPS Robot Navigation Bi-Weekly Report 2/07/04-2/21/04 Chris Foley Kris Horn Richard Neil Pittman Michael Willis GPS Robot Navigation Bi-Weekly Report 2/07/04-2/21/04 Goals for Two Week Period For the first
GPS Robot Navigation Bi-Weekly Report 2/07/04-2/21/04 Chris Foley Kris Horn Richard Neil Pittman Michael Willis GPS Robot Navigation Bi-Weekly Report 2/07/04-2/21/04 Goals for Two Week Period For the first
Functional Algorithm for Automated Pedestrian Collision Avoidance System
 Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
2015 The MathWorks, Inc. 1
 2015 The MathWorks, Inc. 1 [Subtrack 2] Vehicle Dynamics Blockset 소개 김종헌부장 2015 The MathWorks, Inc. 2 Agenda What is Vehicle Dynamics Blockset? How can I use it? 3 Agenda What is Vehicle Dynamics Blockset?
2015 The MathWorks, Inc. 1 [Subtrack 2] Vehicle Dynamics Blockset 소개 김종헌부장 2015 The MathWorks, Inc. 2 Agenda What is Vehicle Dynamics Blockset? How can I use it? 3 Agenda What is Vehicle Dynamics Blockset?
STPA in Automotive Domain Advanced Tutorial
 www.uni-stuttgart.de The Second European STAMP Workshop 2014 STPA in Automotive Domain Advanced Tutorial Asim Abdulkhaleq, Ph.D Student Institute of Software Technology University of Stuttgart, Germany
www.uni-stuttgart.de The Second European STAMP Workshop 2014 STPA in Automotive Domain Advanced Tutorial Asim Abdulkhaleq, Ph.D Student Institute of Software Technology University of Stuttgart, Germany
UNIVERSITÉ DE MONCTON FACULTÉ D INGÉNIERIE. Moncton, NB, Canada PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY
 FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
INTRODUCTION Team Composition Electrical System
 IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
Solar Powered Golf Cart
 Solar Powered Golf Cart Group 9 Jake Bettis Jacob Krueger Matt Roland Matt Tourtelot Project Description The main objective of this project is to design and build a solar-powered, energy efficient electric
Solar Powered Golf Cart Group 9 Jake Bettis Jacob Krueger Matt Roland Matt Tourtelot Project Description The main objective of this project is to design and build a solar-powered, energy efficient electric
The Lug-n-Go. Team #16: Anika Manzo ( ammanzo2), Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018
, Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018") The Lug-n-Go Team #16: Anika Manzo ( ammanzo2), Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018 TA: Mickey Zhang Introduction 1.1 Problem Statement and Objective
The Lug-n-Go Team #16: Anika Manzo ( ammanzo2), Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018 TA: Mickey Zhang Introduction 1.1 Problem Statement and Objective
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE. CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development
 AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
H 2 Hawkeye Reverse Assistance System Diagnostics & Frequently Asked Questions
 H 2 Hawkeye Reverse Assistance System Diagnostics & Frequently Asked Questions Symptom Chart Symptom Possible Cause Repair A. No power supply to Control 1. LED Display does not prove-out when ignition
H 2 Hawkeye Reverse Assistance System Diagnostics & Frequently Asked Questions Symptom Chart Symptom Possible Cause Repair A. No power supply to Control 1. LED Display does not prove-out when ignition
PRESS KIT TABLE OF CONTENTS
 PRESS KIT TABLE OF CONTENTS Ibeo Automotive from technology pioneer to the world s leading developer of automotive LiDAR systems page 1-3 Ibeo Automotive LiDAR Systems at the speed of light for autonomous
PRESS KIT TABLE OF CONTENTS Ibeo Automotive from technology pioneer to the world s leading developer of automotive LiDAR systems page 1-3 Ibeo Automotive LiDAR Systems at the speed of light for autonomous
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS
 MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
Team Introduction Competition Background Current Situation Project Goals Stakeholders Use Scenario Customer Needs Engineering Requirements
 Team Introduction Competition Background Current Situation Project Goals Stakeholders Use Scenario Customer Needs Engineering Requirements Constraints Project Plan Risk Analysis Questions Christopher Jones
Team Introduction Competition Background Current Situation Project Goals Stakeholders Use Scenario Customer Needs Engineering Requirements Constraints Project Plan Risk Analysis Questions Christopher Jones
Items to specify: 4. Motor Speed Control. Head Unit. Radar. Steering Wheel Angle. ego vehicle speed control
 Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
Prototyping Collision Avoidance for suas
 Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
Software Requirements Specification (SRS) Active Park Assist
 Active Park Assist") Software Requirements Specification (SRS) Active Park Assist Authors: David Kircos, Neha Gupta, Derrick Dunville, Anthony Laurain, Shane McCloskey Customer: Eileen Davidson, Ford Motor Company Instructor:
Software Requirements Specification (SRS) Active Park Assist Authors: David Kircos, Neha Gupta, Derrick Dunville, Anthony Laurain, Shane McCloskey Customer: Eileen Davidson, Ford Motor Company Instructor:
CART SAFETY and LOSS PREVENTION PROGRAM MAY 2018
 CART SAFETY and LOSS PREVENTION PROGRAM MAY 2018 A. SCOPE AND APPLICATION The Cart Safety Program and Loss Prevention Program has been established to prevent loss, provide proper maintenance and ensure
CART SAFETY and LOSS PREVENTION PROGRAM MAY 2018 A. SCOPE AND APPLICATION The Cart Safety Program and Loss Prevention Program has been established to prevent loss, provide proper maintenance and ensure
MEMS Sensors for automotive safety. Marc OSAJDA, NXP Semiconductors
 MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
Content. Introduction. Technology. Type of unmanned vehicle. Past, Present, Future. Conclusion
 Introduction Content Technology Type of unmanned vehicle Past, Present, Future Conclusion What is unmanned vehicles? l Without a person on board l Remote controlled l Remote guided vehicles Reduce casualty
Introduction Content Technology Type of unmanned vehicle Past, Present, Future Conclusion What is unmanned vehicles? l Without a person on board l Remote controlled l Remote guided vehicles Reduce casualty
Control of Mobile Robots
 Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY
 UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions
 Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions GTC Europe 2017 Dominik Dörr 2 Motivation Virtual Prototypes Virtual Sensor Models CarMaker and NVIDIA DRIVE PX
Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions GTC Europe 2017 Dominik Dörr 2 Motivation Virtual Prototypes Virtual Sensor Models CarMaker and NVIDIA DRIVE PX
Department of Electrical and Computer Science
 Department of Electrical and Computer Science Howard University Washington, DC 20059 EECE 401 & 402 Senior Design Final Report By Team AutoMoe Tavares Kidd @ 02744064 Lateef Adetona @02732398 Jordan Lafontant
Department of Electrical and Computer Science Howard University Washington, DC 20059 EECE 401 & 402 Senior Design Final Report By Team AutoMoe Tavares Kidd @ 02744064 Lateef Adetona @02732398 Jordan Lafontant
Design and Development of the UTSA Unmanned Aerial System ACE 1
 Design and Development of the UTSA Unmanned Aerial System ACE 1 For use in the 2010 AUVSI Student UAS Competition Ilhan Yilmaz Department of Mechanical Engineering (Team Lead) Christopher Weldon Department
Design and Development of the UTSA Unmanned Aerial System ACE 1 For use in the 2010 AUVSI Student UAS Competition Ilhan Yilmaz Department of Mechanical Engineering (Team Lead) Christopher Weldon Department
Table of Contents. Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.
 Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.") March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
Test Plans & Test Results
 P10227 Variable Intake System for FSAE Race Car Test Plans & Test Results By: Dave Donohue, Dan Swank, Matt Smith, Kursten O'Neill, Tom Giuffre Table of contents 1. MSD I: WKS 8-10 PRELIMINARY TEST PLAN...
P10227 Variable Intake System for FSAE Race Car Test Plans & Test Results By: Dave Donohue, Dan Swank, Matt Smith, Kursten O'Neill, Tom Giuffre Table of contents 1. MSD I: WKS 8-10 PRELIMINARY TEST PLAN...
Compatibility of STPA with GM System Safety Engineering Process. Padma Sundaram Dave Hartfelder
 Compatibility of STPA with GM System Safety Engineering Process Padma Sundaram Dave Hartfelder Table of Contents Introduction GM System Safety Engineering Process Overview Experience with STPA Evaluation
Compatibility of STPA with GM System Safety Engineering Process Padma Sundaram Dave Hartfelder Table of Contents Introduction GM System Safety Engineering Process Overview Experience with STPA Evaluation
The Advancement of Automotive Connectivity: How the Expansion in Bandwidth Paves the Way for Autonomous Driving
 The Advancement of Automotive Connectivity: How the Expansion in Bandwidth Paves the Way for Autonomous Driving Thomas Scannell Automotive Business Development Lead Amphenol Connectors have played a role
The Advancement of Automotive Connectivity: How the Expansion in Bandwidth Paves the Way for Autonomous Driving Thomas Scannell Automotive Business Development Lead Amphenol Connectors have played a role
Automated Driving is the declared goal of the automotive industry. Systems evolve from complicated to complex
 Automated Driving is the declared goal of the automotive industry Systems evolve from complicated to complex Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity
Automated Driving is the declared goal of the automotive industry Systems evolve from complicated to complex Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity
Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System
 System") Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System 2017 Los Angeles Environmental Forum August 28th Ziran Wang ( 王子然 ), Guoyuan Wu, Peng Hao, Kanok Boriboonsomsin, and Matthew
Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System 2017 Los Angeles Environmental Forum August 28th Ziran Wang ( 王子然 ), Guoyuan Wu, Peng Hao, Kanok Boriboonsomsin, and Matthew
2018 SELF-DRIVING SAFETY REPORT
 2018 SELF-DRIVING SAFETY REPORT 1 CREATING NEW TECHNOLOGY TO BRING NEW BENEFITS Imagine a world with no car crashes. Our self-driving vehicles aim to eliminate human driver error the primary cause of 94
2018 SELF-DRIVING SAFETY REPORT 1 CREATING NEW TECHNOLOGY TO BRING NEW BENEFITS Imagine a world with no car crashes. Our self-driving vehicles aim to eliminate human driver error the primary cause of 94
UNIVERSITY OF ROCHESTER ENVIRONMENTAL HEALTH & SAFETY
 Revision No.: New Page 1 of 11 I. PURPOSE Personal transportation via small and agile electric or gas powered vehicles is a convenience but also presents a unique set of hazards. This policy addresses
Revision No.: New Page 1 of 11 I. PURPOSE Personal transportation via small and agile electric or gas powered vehicles is a convenience but also presents a unique set of hazards. This policy addresses
Cilantro. Old Dominion University. Team Members:
 Cilantro Old Dominion University Faculty Advisor: Dr. Lee Belfore Team Captain: Michael Micros lbelfore@odu.edu mmicr001@odu.edu Team Members: Ntiana Sakioti Matthew Phelps Christian Lurhakumbira nsaki001@odu.edu
Cilantro Old Dominion University Faculty Advisor: Dr. Lee Belfore Team Captain: Michael Micros lbelfore@odu.edu mmicr001@odu.edu Team Members: Ntiana Sakioti Matthew Phelps Christian Lurhakumbira nsaki001@odu.edu
9.03 Fact Sheet: Avoiding & Minimizing Impacts
 9.03 Fact Sheet: Avoiding & Minimizing Impacts The purpose of this Student Worksheet is to acquaint you with the techniques of emergency maneuvering, to help you develop the ability to recognize the situations
9.03 Fact Sheet: Avoiding & Minimizing Impacts The purpose of this Student Worksheet is to acquaint you with the techniques of emergency maneuvering, to help you develop the ability to recognize the situations
Mobile Landmark Identification for Visually Impaired and Blind Person
 Mobile Landmark Identification for Visually Impaired and Blind Person AUTHORS Tracey Baird, Manuswin Chansakulporn, Michael Delles, Irem Gultekin, Mohamed Mandeel (Rochester Institute of Technology) ABSTRACT
Mobile Landmark Identification for Visually Impaired and Blind Person AUTHORS Tracey Baird, Manuswin Chansakulporn, Michael Delles, Irem Gultekin, Mohamed Mandeel (Rochester Institute of Technology) ABSTRACT
2015 STPA Conference. A s t u d y o n t h e f u s i o n o f S T P A a n d N i s s a n ' s S y s t e m s E n g i n e e r i n g
 2015 STPA Conference A s t u d y o n t h e f u s i o n o f S T P A a n d N i s s a n ' s S y s t e m s E n g i n e e r i n g Nissan Motor Co., Ltd Tetsunobu Morita, Takashi Nakazawa Masaaki Uchida Massachusetts
2015 STPA Conference A s t u d y o n t h e f u s i o n o f S T P A a n d N i s s a n ' s S y s t e m s E n g i n e e r i n g Nissan Motor Co., Ltd Tetsunobu Morita, Takashi Nakazawa Masaaki Uchida Massachusetts
(2111) Digital Test Rolling REVISED 07/22/14 DO NOT REMOVE THIS. IT NEEDS TO STAY IN FOR THE CONTRACTORS. SP
 Digital Test Rolling REVISED 07/22/14 DO NOT REMOVE THIS. IT NEEDS TO STAY IN FOR THE CONTRACTORS. SP") S-xx (2111) Digital Test Rolling REVISED 07/22/14 DO NOT REMOVE THIS. IT NEEDS TO STAY IN FOR THE CONTRACTORS. SP2014-54.2 The Veda Software and Digital Test Rolling forms are available on the MnDOT Advanced
S-xx (2111) Digital Test Rolling REVISED 07/22/14 DO NOT REMOVE THIS. IT NEEDS TO STAY IN FOR THE CONTRACTORS. SP2014-54.2 The Veda Software and Digital Test Rolling forms are available on the MnDOT Advanced
A Day in the Life of a Smart Campus
 A Day in the Life of a Smart Campus Clay Nesler VP, Global Energy & Sustainability Johnson Controls (clay.g.nesler@jci.com) 19 July 13 Typical Profile Smart Profile Electricity Price 8: PM 1: AM : AM 8:
A Day in the Life of a Smart Campus Clay Nesler VP, Global Energy & Sustainability Johnson Controls (clay.g.nesler@jci.com) 19 July 13 Typical Profile Smart Profile Electricity Price 8: PM 1: AM : AM 8:
GCAT. University of Michigan-Dearborn
 GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
The VisLab Intercontinental Autonomous Challenge: 13,000 km, 3 months, no driver
 The VisLab Intercontinental Autonomous Challenge: 13,000 km, 3 months, no driver M.Bertozzi, L.Bombini, A.Broggi, M.Buzzoni, E.Cardarelli, S.Cattani, P.Cerri, S.Debattisti,. R.I.Fedriga, M.Felisa, L.Gatti,
The VisLab Intercontinental Autonomous Challenge: 13,000 km, 3 months, no driver M.Bertozzi, L.Bombini, A.Broggi, M.Buzzoni, E.Cardarelli, S.Cattani, P.Cerri, S.Debattisti,. R.I.Fedriga, M.Felisa, L.Gatti,
Multidisciplinary Senior Design Project Readiness Package. P18031 Accessible Motorcycle Sidecar
 Project Number: (assigned by MSD) Primary Customer: (provide name, phone number, and email) Sponsor(s): (provide name, phone number, email, and amount of support) Preferred Start Term: Faculty Champion:
Project Number: (assigned by MSD) Primary Customer: (provide name, phone number, and email) Sponsor(s): (provide name, phone number, email, and amount of support) Preferred Start Term: Faculty Champion:
Driving Safety for Carts and Vehicles. Washington & Jefferson College
 Driving Safety for Carts and Vehicles Washington & Jefferson College Types of Utility Vehicles Golf Carts Gator Vehicles Other Vehicles What are you driving? Did you know that defensive driving applies
Driving Safety for Carts and Vehicles Washington & Jefferson College Types of Utility Vehicles Golf Carts Gator Vehicles Other Vehicles What are you driving? Did you know that defensive driving applies
Autonomous Golf Cart
 Autonomous Golf Cart Drew Gaynor, Tyler Latham, Ian Anderson, and Cameron Johnson Ohio Northern University, Ada, Ohio 45810 Email: d-gaynor@onu.edu 1 Abstract As part of a multi-year senior design project
Autonomous Golf Cart Drew Gaynor, Tyler Latham, Ian Anderson, and Cameron Johnson Ohio Northern University, Ada, Ohio 45810 Email: d-gaynor@onu.edu 1 Abstract As part of a multi-year senior design project
An Introduction to Automated Vehicles
 An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
Fort Valley State University Golf Cart/Utility Vehicle Use and Campus Vehicle Usage Policy
 Fort Valley State University Golf Cart/Utility Vehicle Use and Campus Vehicle Usage Policy Purpose and Intent Personal Transportation vehicles This policy provides guidelines for the use of golf carts
Fort Valley State University Golf Cart/Utility Vehicle Use and Campus Vehicle Usage Policy Purpose and Intent Personal Transportation vehicles This policy provides guidelines for the use of golf carts
Enabling Technologies for Autonomous Vehicles
 Enabling Technologies for Autonomous Vehicles Sanjiv Nanda, VP Technology Qualcomm Research August 2017 Qualcomm Research Teams in Seoul, Amsterdam, Bedminster NJ, Philadelphia and San Diego 2 Delivering
Enabling Technologies for Autonomous Vehicles Sanjiv Nanda, VP Technology Qualcomm Research August 2017 Qualcomm Research Teams in Seoul, Amsterdam, Bedminster NJ, Philadelphia and San Diego 2 Delivering
AUTONOMY AND SMART URBAN MOBILITY
 AUTONOMY AND SMART URBAN MOBILITY November 15, 2017 Emilio Frazzoli Professor of Dynamic Systems and Control, ETH Zürich Co-Founder and CTO Why Self-driving Vehicles? A financial perspective on personal
AUTONOMY AND SMART URBAN MOBILITY November 15, 2017 Emilio Frazzoli Professor of Dynamic Systems and Control, ETH Zürich Co-Founder and CTO Why Self-driving Vehicles? A financial perspective on personal
K.I.T.T. KINEMATIC INTELLIGENT TACTICAL TECHNOLOGY
 4/4/2011 SVSU K.I.T.T. KINEMATIC INTELLIGENT TACTICAL TECHNOLOGY Team Members Bryant Barnes Addney Biery Paul List Matthew Plachta Advisor Russell Clark Faculty Advisor Statement I certify that the engineering
4/4/2011 SVSU K.I.T.T. KINEMATIC INTELLIGENT TACTICAL TECHNOLOGY Team Members Bryant Barnes Addney Biery Paul List Matthew Plachta Advisor Russell Clark Faculty Advisor Statement I certify that the engineering
Driving simulation and Scenario Factory for Automated Vehicle validation
 Driving simulation and Scenario Factory for Automated Vehicle validation Pr. Andras Kemeny Scientific Director, A. V. Simulation Expert Leader, Renault INDEX 1. Introduction of autonomous driving 2. Validation
Driving simulation and Scenario Factory for Automated Vehicle validation Pr. Andras Kemeny Scientific Director, A. V. Simulation Expert Leader, Renault INDEX 1. Introduction of autonomous driving 2. Validation
Red Team. DARPA Grand Challenge Technical Paper. Revision: 6.1 Submitted for Public Release. April 8, 2004
 Red Team DARPA Grand Challenge Technical Paper Revision: 6.1 Submitted for Public Release April 8, 2004 Team Leader: William Red L. Whittaker Email address: red@ri.cmu.edu Mailing address: Carnegie Mellon
Red Team DARPA Grand Challenge Technical Paper Revision: 6.1 Submitted for Public Release April 8, 2004 Team Leader: William Red L. Whittaker Email address: red@ri.cmu.edu Mailing address: Carnegie Mellon
Traffic Data Services: reporting and data analytics using cellular data
 Make traffic and population movement analysis smart, fast, pervasive and cost-effective. Data sheet Traffic Data Services: reporting and data analytics using cellular data Accurate data collection and
Make traffic and population movement analysis smart, fast, pervasive and cost-effective. Data sheet Traffic Data Services: reporting and data analytics using cellular data Accurate data collection and
RB-Mel-03. SCITOS G5 Mobile Platform Complete Package
 RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
Autonomous Golf. Team 43 - Thomas Holcomb and William Peterson ECE 445 Project Proposal - Fall 2016 TA: Nicholas Ratajczyk
 Autonomous Golf Team 43 - Thomas Holcomb and William Peterson ECE 445 Project Proposal - Fall 2016 TA: Nicholas Ratajczyk 1. Introduction 1.1 Objective From a practical standpoint, the biggest obstacle
Autonomous Golf Team 43 - Thomas Holcomb and William Peterson ECE 445 Project Proposal - Fall 2016 TA: Nicholas Ratajczyk 1. Introduction 1.1 Objective From a practical standpoint, the biggest obstacle
Sabertooth A Hybrid AUV/ROV offshore system. Jan Siesjö Chief Engineer
 Sabertooth A Hybrid AUV/ROV offshore system Jan Siesjö Chief Engineer jan.siesjo@saabgroup.com SAAB WORLDWIDE Employees 2010 Sweden 10,372 South Africa 1,086 Australia 349 USA 194 Great Britain 117 Finland
Sabertooth A Hybrid AUV/ROV offshore system Jan Siesjö Chief Engineer jan.siesjo@saabgroup.com SAAB WORLDWIDE Employees 2010 Sweden 10,372 South Africa 1,086 Australia 349 USA 194 Great Britain 117 Finland
ZF Advances Key Technologies for Automated Driving
 Page 1/5, January 9, 2017 ZF Advances Key Technologies for Automated Driving ZF s See Think Act supports self-driving cars and trucks ZF and NVIDIA provide computing power to bring artificial intelligence
Page 1/5, January 9, 2017 ZF Advances Key Technologies for Automated Driving ZF s See Think Act supports self-driving cars and trucks ZF and NVIDIA provide computing power to bring artificial intelligence
SECURITIES AND EXCHANGE COMMISSION WASHINGTON, D.C FORM 6-K MOBILEYE N.V.
 SECURITIES AND EXCHANGE COMMISSION WASHINGTON, D.C. 20549 FORM 6-K REPORT OF FOREIGN PRIVATE ISSUER PURSUANT TO RULE 13a-16 OR 15d-16 OF THE SECURITIES EXCHANGE ACT OF 1934 For the month of February 2017
SECURITIES AND EXCHANGE COMMISSION WASHINGTON, D.C. 20549 FORM 6-K REPORT OF FOREIGN PRIVATE ISSUER PURSUANT TO RULE 13a-16 OR 15d-16 OF THE SECURITIES EXCHANGE ACT OF 1934 For the month of February 2017
Daedalus Autonomous Vehicle
 Daedalus Autonomous Vehicle June 20, 2002 Team Members: Nicole Anthony Byron Collins Michael Fleming Chuck Liebal Michelle Nicholas Matthew Schmid Required Statement from Faculty Advisor I, Dr. Charles
Daedalus Autonomous Vehicle June 20, 2002 Team Members: Nicole Anthony Byron Collins Michael Fleming Chuck Liebal Michelle Nicholas Matthew Schmid Required Statement from Faculty Advisor I, Dr. Charles
Near-Term Automation Issues: Use Cases and Standards Needs
 Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
Security for the Autonomous Vehicle Identifying the Challenges
 Security for the Autonomous Vehicle Identifying the Challenges Mike Parris Head of Secure Car Division November 2016 Today s agenda A Definition Developing a Threat Model Key Findings Conclusions 2 A Definition
Security for the Autonomous Vehicle Identifying the Challenges Mike Parris Head of Secure Car Division November 2016 Today s agenda A Definition Developing a Threat Model Key Findings Conclusions 2 A Definition
ABSTRACT 1. INTRODUCTION
 Autonomous People Mover: Adding Sensors Nathan Biviano, Madeleine Daigneau, James Danko, Connor Goss, Austin Hintz, Sam Kuhr, Benjamin Tarloff, John Kaemmerlen, Raymond Ptucha Rochester Institute of Technology
Autonomous People Mover: Adding Sensors Nathan Biviano, Madeleine Daigneau, James Danko, Connor Goss, Austin Hintz, Sam Kuhr, Benjamin Tarloff, John Kaemmerlen, Raymond Ptucha Rochester Institute of Technology
ADVANCES IN INTELLIGENT VEHICLES
 ADVANCES IN INTELLIGENT VEHICLES MIKE BROWN SWRI 1 OVERVIEW Intelligent Vehicle Research Platform MARTI Intelligent Vehicle Technologies Cooperative Vehicles / Infrastructure Recent Demonstrations Conclusions
ADVANCES IN INTELLIGENT VEHICLES MIKE BROWN SWRI 1 OVERVIEW Intelligent Vehicle Research Platform MARTI Intelligent Vehicle Technologies Cooperative Vehicles / Infrastructure Recent Demonstrations Conclusions
CSE 352: Self-Driving Cars. Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark
 CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Automated Vehicles: Terminology and Taxonomy
 Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
PROJECT IDEA SUBMISSION STUDENT
 PROJECT IDEA SUBMISSION STUDENT Team Contacts - 1 st person listed serves as the point of contact with Professor Jensen - Initial team size may be from 4 to 6 members (all members must agree to have their
PROJECT IDEA SUBMISSION STUDENT Team Contacts - 1 st person listed serves as the point of contact with Professor Jensen - Initial team size may be from 4 to 6 members (all members must agree to have their
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
ISA Intimidator. July 6-8, Coronado Springs Resort Walt Disney World, Florida
 ISA Intimidator 10 th Annual Intelligent Ground Vehicle Competition July 6-8, 2002- Coronado Springs Resort Walt Disney World, Florida Faculty Advisor Contact Roy Pruett Bluefield State College 304-327-4037
ISA Intimidator 10 th Annual Intelligent Ground Vehicle Competition July 6-8, 2002- Coronado Springs Resort Walt Disney World, Florida Faculty Advisor Contact Roy Pruett Bluefield State College 304-327-4037
Pedestrian Autonomous Emergency Braking Test Protocol (Version II) February 2019
 February 2019") Pedestrian Autonomous Emergency Braking Test Protocol (Version II) February 2019 Contents DOCUMENT REVISION HISTORY... ii SUMMARY... 1 TEST ENVIRONMENT... 2 Surface and Markings... 2 Surroundings... 2
Pedestrian Autonomous Emergency Braking Test Protocol (Version II) February 2019 Contents DOCUMENT REVISION HISTORY... ii SUMMARY... 1 TEST ENVIRONMENT... 2 Surface and Markings... 2 Surroundings... 2
WHITE PAPER Autonomous Driving A Bird s Eye View
 WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
GOVERNMENT STATUS REPORT OF JAPAN
 GOVERNMENT STATUS REPORT OF JAPAN Hidenobu KUBOTA Director, Policy Planning Office for Automated Driving Technology, Engineering Policy Division, Road Transport Bureau, Ministry of Land, Infrastructure,
GOVERNMENT STATUS REPORT OF JAPAN Hidenobu KUBOTA Director, Policy Planning Office for Automated Driving Technology, Engineering Policy Division, Road Transport Bureau, Ministry of Land, Infrastructure,
AEB IWG 02. ISO Standard: FVCMS. I received the following explanation from the FVCMS author:
 ISO Standard: FVCMS I received the following explanation from the FVCMS author: The intent behind SRB was to potentially draw the driver s attention to hazards ahead of the SV before MB was enacted but
ISO Standard: FVCMS I received the following explanation from the FVCMS author: The intent behind SRB was to potentially draw the driver s attention to hazards ahead of the SV before MB was enacted but
Authorized Driver Policy and Procedures
 Authorized Driver Policy and Procedures In order to comply with the Arizona Administrative Code Fleet Safety Policy (R2-10- 207.12), NAU must institute the requirements contained in this policy. Departmental
Authorized Driver Policy and Procedures In order to comply with the Arizona Administrative Code Fleet Safety Policy (R2-10- 207.12), NAU must institute the requirements contained in this policy. Departmental
RED RAVEN, THE LINKED-BOGIE PROTOTYPE. Ara Mekhtarian, Joseph Horvath, C.T. Lin. Department of Mechanical Engineering,
 RED RAVEN, THE LINKED-BOGIE PROTOTYPE Ara Mekhtarian, Joseph Horvath, C.T. Lin Department of Mechanical Engineering, California State University, Northridge California, USA Abstract RedRAVEN is a pioneered
RED RAVEN, THE LINKED-BOGIE PROTOTYPE Ara Mekhtarian, Joseph Horvath, C.T. Lin Department of Mechanical Engineering, California State University, Northridge California, USA Abstract RedRAVEN is a pioneered
2016 IGVC Design Report Submitted: May 13, 2016
 2016 IGVC Design Report Submitted: May 13, 2016 I certify that the design and engineering of the vehicle by the current student team has been significant and equivalent to what might be awarded credit
2016 IGVC Design Report Submitted: May 13, 2016 I certify that the design and engineering of the vehicle by the current student team has been significant and equivalent to what might be awarded credit
FACILITIES MANAGEMENT POLICIES AND PROCEDURES. Director of Transportation Services and Work Management WCU MOTOR POOL 15-PASSENTER VAN POLICY
 NUMBER: 807 DISTRIBUTION: FACILITIES MANAGEMENT POLICIES AND PROCEDURES ISSUED BY: Director of Transportation Services and Work Management EFFECTIVE: SUBJECT: WCU MOTOR POOL 15-PASSENTER VAN POLICY I.
NUMBER: 807 DISTRIBUTION: FACILITIES MANAGEMENT POLICIES AND PROCEDURES ISSUED BY: Director of Transportation Services and Work Management EFFECTIVE: SUBJECT: WCU MOTOR POOL 15-PASSENTER VAN POLICY I.
USC Upstate Policy For The Safe Operation of Golf Carts, Accessibility Carts, Low Speed and Utility Vehicles on Campus
 Effective Date: October 1, 2012 Annual Review Date: October USC Upstate Policy For The Safe Operation of Golf Carts, Accessibility Carts, Low Speed and Utility Vehicles on Campus 1 I. Purpose: USC Upstate
Effective Date: October 1, 2012 Annual Review Date: October USC Upstate Policy For The Safe Operation of Golf Carts, Accessibility Carts, Low Speed and Utility Vehicles on Campus 1 I. Purpose: USC Upstate
AC : USE OF POWER WHEELS CAR TO ILLUSTRATE ENGI- NEERING PRINCIPLES
 AC 2011-2029: USE OF POWER WHEELS CAR TO ILLUSTRATE ENGI- NEERING PRINCIPLES Dr. Howard Medoff, Pennsylvania State University, Ogontz Campus Associate Professor of Engineering, Penn State Abington Research
AC 2011-2029: USE OF POWER WHEELS CAR TO ILLUSTRATE ENGI- NEERING PRINCIPLES Dr. Howard Medoff, Pennsylvania State University, Ogontz Campus Associate Professor of Engineering, Penn State Abington Research
AUTOCITS. Regulation Study for Interoperability in the Adoption the Autonomous Driving in European Urban Nodes. LISBON Pilot
 Regulation Study for Interoperability in the Adoption the Autonomous Driving in European Urban Nodes AUTOCITS LISBON Pilot Pedro Serra IPN Cristiano Premebida - UC Lisbon, October 10th LISBON PILOT 1.
Regulation Study for Interoperability in the Adoption the Autonomous Driving in European Urban Nodes AUTOCITS LISBON Pilot Pedro Serra IPN Cristiano Premebida - UC Lisbon, October 10th LISBON PILOT 1.
Financial Planning Association of Michigan 2018 Fall Symposium Autonomous Vehicles Presentation
 Financial Planning Association of Michigan 2018 Fall Symposium Autonomous s Presentation 1 Katherine Ralston Program Manager, Autonomous s 2 FORD SECRET Why Autonomous s Societal Impact Great potential
Financial Planning Association of Michigan 2018 Fall Symposium Autonomous s Presentation 1 Katherine Ralston Program Manager, Autonomous s 2 FORD SECRET Why Autonomous s Societal Impact Great potential
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS
 EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
Environmental Health and Safety Last Reviewed: September 10, 2018
 CART/UTILITY VEHICLE OPERATION Philosophy: I. INTRODUCTION This procedure outlines requirements for the use of electric, solar or gaspowered carts and/or similar utility type vehicles (carts) on all campuses
CART/UTILITY VEHICLE OPERATION Philosophy: I. INTRODUCTION This procedure outlines requirements for the use of electric, solar or gaspowered carts and/or similar utility type vehicles (carts) on all campuses
Vehicle Dynamics Models for Driving Simulators
 Vehicle Dynamics Models for Driving Simulators Thomas D. Gillespie, Director of Product Planning Mechanical Simulation Corporation Agenda Introduction to Mechanical Simulation Vehicle dynamics simulation
Vehicle Dynamics Models for Driving Simulators Thomas D. Gillespie, Director of Product Planning Mechanical Simulation Corporation Agenda Introduction to Mechanical Simulation Vehicle dynamics simulation
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
Preliminary Design Report. Project Title: Lunabot
 EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 30 January 2012 Project Title: Lunabot Team Name: UF Lunabotics Team Members: Name: Matt Morgan Name: UF Lunabotics Team
EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 30 January 2012 Project Title: Lunabot Team Name: UF Lunabotics Team Members: Name: Matt Morgan Name: UF Lunabotics Team
ECO BIKE TEST PLAN DOCUMENT
 Introduction: ECO BIKE TEST PLAN DOCUMENT Traffic jams have always been one of the major global issues, which can have negative impacts on the environment and the human. Nowadays, commuters have had a
Introduction: ECO BIKE TEST PLAN DOCUMENT Traffic jams have always been one of the major global issues, which can have negative impacts on the environment and the human. Nowadays, commuters have had a
Palos Verdes High School 1
 Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
Backup Sensors User s Information CR-V
 Backup Sensors User s Information CR-V Contents Introduction... 3 Important Information... 4 How the Backup Sensors Work... 5 Limitations... 8 Operation... 10 Daily Inspection... 12 Caring for the Backup
Backup Sensors User s Information CR-V Contents Introduction... 3 Important Information... 4 How the Backup Sensors Work... 5 Limitations... 8 Operation... 10 Daily Inspection... 12 Caring for the Backup
Policies and Procedures
 PAGE 1 OF 5 PURPOSE This policy has been developed to define standards of conduct and establish mandatory training for faculty, staff, students, volunteers or contractors/vendors who operate golf carts
PAGE 1 OF 5 PURPOSE This policy has been developed to define standards of conduct and establish mandatory training for faculty, staff, students, volunteers or contractors/vendors who operate golf carts
ZF Mitigates Rear-End Collisions with New Electronic Safety Assistant for Trucks
 Page 1/6, 2016-06-29 ZF Mitigates Rear-End Collisions with New Electronic Safety Assistant for Trucks The Evasive Maneuver Assist (EMA), developed with project partner WABCO, automatically steers tractor-trailers
Page 1/6, 2016-06-29 ZF Mitigates Rear-End Collisions with New Electronic Safety Assistant for Trucks The Evasive Maneuver Assist (EMA), developed with project partner WABCO, automatically steers tractor-trailers
Backup Sensors User s Information CR-V
 Backup Sensors User s Information CR-V Contents Introduction... 3 Important Information... 4 How the Backup Sensors Work... 5 Limitations... 8 Operation... 10 Daily Inspection... 12 Caring for the Backup
Backup Sensors User s Information CR-V Contents Introduction... 3 Important Information... 4 How the Backup Sensors Work... 5 Limitations... 8 Operation... 10 Daily Inspection... 12 Caring for the Backup
Electronic Systems Research at CU-ICAR
 Electronic Systems Research at CU-ICAR Todd H. Hubing Michelin Professor of Vehicular Electronics Clemson University Automobiles are Complex Electronic Systems Navigation System Fuel Injection Engine Ignition
Electronic Systems Research at CU-ICAR Todd H. Hubing Michelin Professor of Vehicular Electronics Clemson University Automobiles are Complex Electronic Systems Navigation System Fuel Injection Engine Ignition