Odin s Journey. Development of Team Victor Tango s Autonomous Vehicle for the DARPA Urban Challenge. Jesse Hurdus. Dennis Hong. December 9th, 2007
|
|
|
- Julius Fields
- 5 years ago
- Views:
Transcription
 dhong@vt.edu December 9th, 2007 Jesse Hurdus Graduate Student Unmanned Systems jhurdus@vt.")
1 Odin s Journey Development of Team Victor Tango s Autonomous Vehicle for the DARPA Urban Challenge Dennis Hong Assistant Professor Robotics & Mechanisms Laboratory (RoMeLa) dhong@vt.edu December 9th, 2007 Jesse Hurdus Graduate Student Unmanned Systems jhurdus@vt.edu



2 Presentation Outline Introduction System Overview Software Qualifying and Final Race

3 The DARPA Grand Challenge

4 DARPA Grand Challenge I Cliff was a ClubCar converted in only a few months and on a shoestring budget. One of three vehicles to finish the Qualifying course without hitting anything Completed about 100 yds in the desert before a drive belt failed



5 DARPA Grand Challenge II Virginia Tech had two entries in the 2005 Grand Challenge Cliff was rebuilt for another try at the desert Rocky was built to test new software algorithms


6 DARPA Grand Challenge II: The Desert Final course was 130 miles long with a 10 hour time limit Finished 8 th and 9 th, both vehicles traversed about 40 miles of the course Rocky had a generator failure, Cliff an engine shutdown

7 DARPA Announces Urban Challenge! Race set for November 3 rd, st Place: $2,000,000 2 nd Place: $1,000,000 3 rd Place: $500,000 $1,000,000 research contracts to given to 11 teams, including - Stanford University - Carnegie Mellon University - MIT - Cornell University - California Institute of Technology - Honeywell Aerospace - Raytheon - Virginia Tech!!




8 Team VictorTango was formed + Advisory Board

9 The Urban Challenge addressed city driving Navigate approximately 60 miles of roads in 6 hours Obey California State driving regulations and interact with moving vehicles Master many driving behaviors: Stop, check, and go Vehicle following Lane changing U-turns Parking All of this must be completely autonomous
10 A Priori data was supplied in two course definition files 1. Route Network Definition File (RNDF): Defines road segments and lane widths, zones, parking spots, stop lines, and possible waypoints throughout the course 2. Mission Definition File (MDF): Defines the current vehicle mission, which includes active checkpoints to achieve and speeds limits to obey building stop line waypoints checkpoints 1 5

11 Odin was VictorTango s Urban Challenge entry
 Control and Monitoring: Electronic")


12 VT System: Modified 2005 Ford Hybrid Escape (Odin) Control and Monitoring: Electronic Control of Steering, Throttle, Shift Linear Brake Actuator E-Brake, CAN Bus Three computers on board: Windows Quad Core Server Linux Quad Core Server NI RIO (FPGA & Controller)

13 Power Distribution Uses the 330 VDC and 12 VDC from the Ford Escape Hybrid battery pack 2 kw of power available for added components Continuous runtime with the vehicle charging capabilities





14 Sensor Configuration Overview 100m Sensor Ranges NovAtel SICK Cameras IBEO laser ALASCA Propack are range used laser GPS/IMU finders for scanners vision perform provides line finding road localization obstacle and and small object detection obstacle classification detection
15 Entire Software Architecture IBEO LIDAR Route Planner Determine list of exits to achieve checkpoints. Replan to save time or upon request. Sensor Interface Acquire, timestamp, and log sensor data Sensor Data and Specs Dynamic Obstacle Predictor Predict likely paths of dynamic obstacles, based on traffic rules Optimal Route (Exits) Request Replan Blockage/ Traffic Updates Sensor Interface Acquire, timestamp, and log sensor data Sensor Data and Specs Object Classification Locate and classify dynamic and static obstacles Driving Behaviors Produce target points for highlevel maneuvers (Lane Change, Passing, Intersection Precedence, Parking) Monocular Vision GPS/INS Localization Compute global position, local position, and velocity state Target Points, Max Speed, Lane Mgmt, Direction Points Achievable? SICK LIDAR Sensor Interface Acquire, timestamp, and log sensor data Sensor Data and Specs Stop Line Position Road Detection Locate drivable area, lanes, and stop lines Motion Planner Achieve target points, Follow roads, Avoid obstacles Turn Signals Local Position and Velocity State Static Obstacles Dynamic Obstacles User Interface Provide interface to set MDF, RNDF, and Vehicle Mode Control Mode Curvature, Speed Steering Angle Platform Specs Vehicle Interface Control vehicle speed and curvature, signals, E-stop Obstacle Predictions Lane Position Drivable Area Steering Angle and Odometry Status Health Monitor Track health of all software components Status Emergency Stop Vehicle-Specific DBW Signals Drive-by-Wire (DBW)
16 JAUS Communication Software uses JAUS conventions and messages Software uses standard defined messages as well as custom messages Software can be moved without reconfiguration Node Manager Node Manager Component A Node 1 Component B Component C Node 2
17 Perception Software Overview Perception Modules Perception Messages Object Classification Static Obstacles Sensors Localization Dynamic Obstacle Predictor Dynamic Obstacle Predictions Position, Velocity Planning Modules Road Detection Drivable Area Lane Position Raw Perception data is Messages Modules taken in process output from are transmitted each sensor the of raw the independent data sensing via JAUS looking systems to Perception Planning for specific Modules Messages types of information

18 Obstacle Classification & Prediction IBEO Alasca laser scanner returns segmented obstacles as well as raw scan data Classification software uses additional velocity and size constraints for classification Classification results verified with vision Prediction software uses lane data and history to predict future actions



19 Road Detection RNDF Based: Cubic spline interpolation generated between RNDF points Georeferenced imagery allowed for tweaking in complex areas Vision Based: Initial processing based on color Road coverage is formed with morphological operations LIDAR Based: Curb detection algorithm uses statistical methods Tracks around low visibility corners and brief occlusions
20 Planning Software Overview The Route Planner component focuses on mission level goals, specifically which roads are traveled. The Driving Behaviors component is responsible for following the rules of the road, such as when to proceed at an intersection. Motion Planning controls the vehicle path, avoiding obstacles and setting travel speed. Vehicle Interface executes the motion commands

21 Route Planning Route planner chooses roads to travel and produces sequence of exits Minimizes total travel time using A* search Receives updates: Blockages Traffic speed A Planned Route
22 Driving Behaviors Driving behaviors makes decisions concerning the rules of the road Classified Situation: Intersection Stop Classified Situation: Standard Road Checkpoint Multiple behaviors are integrated based off the current situation Disabled Vehicle Directs motion planning with target points and a behavior profile 1. My turn? 2. Intersection clear? Odin Route Driver Passing Driver
23 Special Considerations in Driving Behaviors State machines within behaviors are used to deal with noisy perception data Route Driver Passing Driver Blockage Driver A winner takes all strategy is used to deal with competing behaviors Behavior Integrator Desired Lane Desired Speed Desired Turn Signal
24 Motion Planning Motion Planning Motion planning produces vehicle commands to reach goal points and decides if path is blocked Speed Limiter Speed limiter software monitors stop points and other vehicles Trajectory Search Searches achievable trajectory space to plan final travel path Vehicle Interface
25 Cost Map Creation Cost map stores cost of area around vehicle Lane Center Vehicle is at bottom center of map Costs from Obstacles Lane Obstacles Lane Boundary Cost increases with obstacle proximity Vehicle
26 Trajectory Search Search algorithm used to evaluate sequences of actions For each action, vehicle motion is simulated Vehicle motion is checked against cost map and goal X
27 Trajectory Search Search algorithm used to evaluate sequences of actions For each action, vehicle motion is simulated Vehicle motion is checked against cost map and goal Actions are combined into a final path
28 Vehicle Modeling Simple bicycle model used Model used to determine vehicle path for cost map φ L Vehicle Parameters Wheel Base Understeer Coefficient State Variables Heading Steering Angle Position (x,y) Inputs Forward Velocity Steering Rate

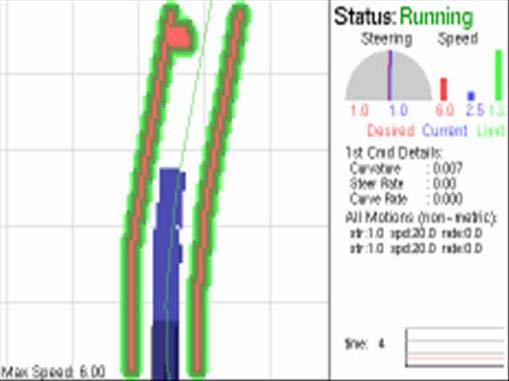
29 Motion Planning Example

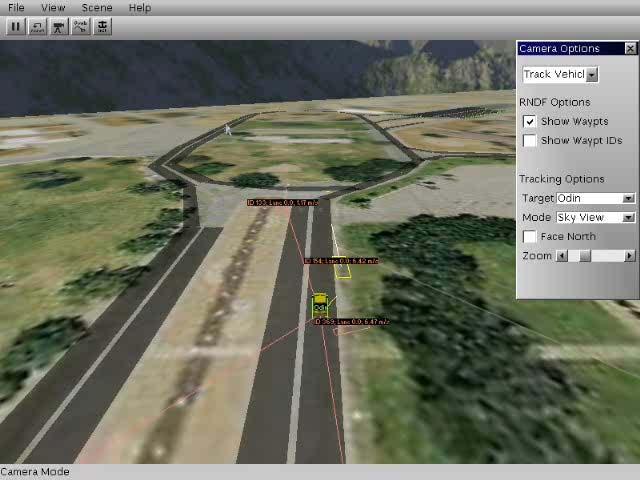
30 Software Starts in Simulation Simulation provides many advantages Controlled environment Division of labor Visual Overlays Simulation step increases team safety Simulated 4-way Stop Simulation visualization also used during field testing Dynamic Obstacle Prediction

31 Odin ready for competition

32 National Qualification Event: Oct. 2007, Victorville, CA 35 teams traveled to Victorville for NQE DARPA presented 3 courses to test the teams: A, B, & C Course requirements were unknown until arrival at the site





33 The Competition Many different approaches to the problem were represented - Massachusetts Case- Insight Osh-Kosh Western Racing Institute of Technology

34 NQE Course A tested traffic behaviors

35 Odin was first up and performed well
36 but not all teams did as well

37 NQE B tested navigation and static obstacles

38 Odin started well, but had difficulties

39 Odin encountered some unexpected situations The Gauntlet caused the most difficulty Unnecessary blind spot check Lane widths too thin Had to pass in-between lanes

40 Follow-up Testing in Practice Area



41 NQE C tested intersections and blockages

42 Odin was first vehicle to fully complete NQE C



43 Odin was quickly selected for the finals Second of six teams to receive early selection Five more teams selected after further NQE runs DARPA fell short of 20 team target

44 Urban Challenge Final Event

45 Practice start revealed interesting complications So many robots had never been put so close together! Sensor interference GPS outages Safety radio system failures Odin had no problems DARPA changed start procedure
46 November 3 rd, 2007 DARPA Urban Challenge

47 Bot-on-Bot Interactions were common

48 Bot-on-Bot Interactions were common

49 After almost 6 long hours, Odin crossed the finish

50 The next day, the places were announced VictorTango took 3 rd place, winning $500,000 Tartan Racing was 1 st, Stanford 2 nd Only 6 of the 11 teams completed the course
51 The Celebration
52 Questions?
53 Reference Slides
54 Dynamic Obstacle Filtering
55 Motion Planning INPUTS Object Data ZONE Navigation MOTION PLANNING Vehicle Localization Zone Segment Parking SEGMENT Lane Speed Limiter Monitors dynamic obstacles and stop lines to manage desired speed Driving Behaviors Target Points, Speed, Lane Road Detection Segment U-turn Intersection Achievable Trajectory Search Determines fastest path through the given environment based on: Drivable area (lane/zone/segment) Static obstacles Speed Vehicle dynamics Pause? Target Points Achievable? Speed, Curvature, Acceleration OUTPUTS Driving Behaviors Vehicle Interface


56 Computing Systems Only three computers on board Windows Quad Core Server Vision processing Linux Quad Core Server Multiple virtual machines NI RIO Integrated FPGA and controller Controls drive by wire components

57 GPS / INS Novatel SPAN System consisting of: Novatel Propack LB plus GPS Honeywell HG1700 IMU OmniStar HP corrections Position further refined by localization software filter incorporating: Wheel speeds Stop line location
58 Sick LIDAR Single plane LIDAR common in robotics Mounted on roof pointed downwards Used to profile terrain Road Detection Negative Obstacle Detection



59 IBEO LIDAR Using IBEO s A0 scanner as well as latest XT Fusion System Multi-plane and Multi-pulse technology System includes processor to fuse sensors and classify obstacles
 Vision used for road detection, lane segmentation and obstacle")
60 Cameras Odin uses a pair of industrial firewire cameras Only monocular image processing techniques used (no stereo) Vision used for road detection, lane segmentation and obstacle classification

61 Lane Finding Lanes are determined by analyzing detected road area and lane markings A priori lane information is used for initial lane position estimate Line/curve fitting is used to find road markings from camera images
62 Example 1: Cutting Off Traffic Problem narrowed to a bug in the IBEO ECU software To avoid object overflow, a region of interest is used This region of interest was not working properly Commanded ROI Odin Actual ROI Rectangular ROIs were chosen

63 Odin also encountered a GPS problem Drove off course on to curb Determined to be GPS pop problem 10m pop due to unknown phenomena Other teams encountered similar problems No solution found during event NQE B run otherwise successful
64 Site Visit: July 29, Blacksburg, VA DARPA down selected from 86 to 36 teams based on Site Visit performances Tested Skills: Basic navigation Intersection behavior Passing disabled vehicles

65 Bot-on-Bot Interactions were common
Vehicles at Volkswagen
 Autonomous Driving and Intelligent Vehicles at Volkswagen Dirk Langer, Ph.D. VW Autonomous Driving Story 2000 2003 2006 Robot Klaus Purpose: Replace test drivers on poor test tracks (job safety) Robot
Autonomous Driving and Intelligent Vehicles at Volkswagen Dirk Langer, Ph.D. VW Autonomous Driving Story 2000 2003 2006 Robot Klaus Purpose: Replace test drivers on poor test tracks (job safety) Robot
Introduction Projects Basic Design Perception Motion Planning Mission Planning Behaviour Conclusion. Autonomous Vehicles
 Dipak Chaudhari Sriram Kashyap M S 2008 Outline 1 Introduction 2 Projects 3 Basic Design 4 Perception 5 Motion Planning 6 Mission Planning 7 Behaviour 8 Conclusion Introduction Unmanned Vehicles: No driver
Dipak Chaudhari Sriram Kashyap M S 2008 Outline 1 Introduction 2 Projects 3 Basic Design 4 Perception 5 Motion Planning 6 Mission Planning 7 Behaviour 8 Conclusion Introduction Unmanned Vehicles: No driver
Unmanned autonomous vehicles in air land and sea
 based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
Car Technologies Stanford and CMU
 Car Technologies Stanford and CMU Stanford Racing Stanford Racing s entry was dubbed Junior in honor of Leland Stanford Jr. Team led by Sebastian Thrun and Mike Montemerlo (from SAIL) VW Passat Primary
Car Technologies Stanford and CMU Stanford Racing Stanford Racing s entry was dubbed Junior in honor of Leland Stanford Jr. Team led by Sebastian Thrun and Mike Montemerlo (from SAIL) VW Passat Primary
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS
 MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
Smart Control for Electric/Autonomous Vehicles
 Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
Jimi van der Woning. 30 November 2010
 Jimi van der Woning 30 November 2010 The importance of robotic cars DARPA Hardware Software Path planning Google Car Where are we now? Future 30-11-2010 Jimi van der Woning 2/17 Currently over 800 million
Jimi van der Woning 30 November 2010 The importance of robotic cars DARPA Hardware Software Path planning Google Car Where are we now? Future 30-11-2010 Jimi van der Woning 2/17 Currently over 800 million
Autonomous Mobile Robots and Intelligent Control Issues. Sven Seeland
 Autonomous Mobile Robots and Intelligent Control Issues Sven Seeland Overview Introduction Motivation History of Autonomous Cars DARPA Grand Challenge History and Rules Controlling Autonomous Cars MIT
Autonomous Mobile Robots and Intelligent Control Issues Sven Seeland Overview Introduction Motivation History of Autonomous Cars DARPA Grand Challenge History and Rules Controlling Autonomous Cars MIT
THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA.
 GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
Autonomous Ground Vehicle Technologies Applied to the DARPA Grand Challenge
 Autonomous Ground Vehicle Technologies Applied to the DARPA Grand Challenge Carl D. Crane III*, David G. Armstrong Jr. * Mel W. Torrie **, and Sarah A. Gray ** * Center for Intelligent Machines and Robotics
Autonomous Ground Vehicle Technologies Applied to the DARPA Grand Challenge Carl D. Crane III*, David G. Armstrong Jr. * Mel W. Torrie **, and Sarah A. Gray ** * Center for Intelligent Machines and Robotics
A Proposed Standardized Testing Procedure for Autonomous Ground Vehicles
 A Proposed Standardized Testing Procedure for Autonomous Ground Vehicles Thomas James Alberi Thesis submitted to the faculty of the Virginia Polytechnic Institute and State University in partial fulfillment
A Proposed Standardized Testing Procedure for Autonomous Ground Vehicles Thomas James Alberi Thesis submitted to the faculty of the Virginia Polytechnic Institute and State University in partial fulfillment
Functional Algorithm for Automated Pedestrian Collision Avoidance System
 Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
Red Team. DARPA Grand Challenge Technical Paper. Revision: 6.1 Submitted for Public Release. April 8, 2004
 Red Team DARPA Grand Challenge Technical Paper Revision: 6.1 Submitted for Public Release April 8, 2004 Team Leader: William Red L. Whittaker Email address: red@ri.cmu.edu Mailing address: Carnegie Mellon
Red Team DARPA Grand Challenge Technical Paper Revision: 6.1 Submitted for Public Release April 8, 2004 Team Leader: William Red L. Whittaker Email address: red@ri.cmu.edu Mailing address: Carnegie Mellon
Control of Mobile Robots
 Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Items to specify: 4. Motor Speed Control. Head Unit. Radar. Steering Wheel Angle. ego vehicle speed control
 Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
Development of the SciAutonics / Auburn Engineering Autonomous Car for the Urban Challenge. Prepared for: DARPA Urban Challenge
 Development of the SciAutonics / Auburn Engineering Autonomous Car for the Urban Challenge Prepared for: DARPA Urban Challenge Prepared by: SciAutonics, LLC and Auburn University College of Engineering
Development of the SciAutonics / Auburn Engineering Autonomous Car for the Urban Challenge Prepared for: DARPA Urban Challenge Prepared by: SciAutonics, LLC and Auburn University College of Engineering
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
ADVANCES IN INTELLIGENT VEHICLES
 ADVANCES IN INTELLIGENT VEHICLES MIKE BROWN SWRI 1 OVERVIEW Intelligent Vehicle Research Platform MARTI Intelligent Vehicle Technologies Cooperative Vehicles / Infrastructure Recent Demonstrations Conclusions
ADVANCES IN INTELLIGENT VEHICLES MIKE BROWN SWRI 1 OVERVIEW Intelligent Vehicle Research Platform MARTI Intelligent Vehicle Technologies Cooperative Vehicles / Infrastructure Recent Demonstrations Conclusions
UNIVERSITÉ DE MONCTON FACULTÉ D INGÉNIERIE. Moncton, NB, Canada PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY
 FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
Enabling Technologies for Autonomous Vehicles
 Enabling Technologies for Autonomous Vehicles Sanjiv Nanda, VP Technology Qualcomm Research August 2017 Qualcomm Research Teams in Seoul, Amsterdam, Bedminster NJ, Philadelphia and San Diego 2 Delivering
Enabling Technologies for Autonomous Vehicles Sanjiv Nanda, VP Technology Qualcomm Research August 2017 Qualcomm Research Teams in Seoul, Amsterdam, Bedminster NJ, Philadelphia and San Diego 2 Delivering
Development of an Autonomous Vehicle for High-speed Navigation and Obstacle Avoidance
 Development of an Autonomous Vehicle for High-speed Navigation and Obstacle Avoidance Jee-Hwan Ryu, Member, IEEE, Dmitriy Ogay, Sergey Bulavintsev, Hyuk Kim, and Jang-Sik Park Abstract This paper introduces
Development of an Autonomous Vehicle for High-speed Navigation and Obstacle Avoidance Jee-Hwan Ryu, Member, IEEE, Dmitriy Ogay, Sergey Bulavintsev, Hyuk Kim, and Jang-Sik Park Abstract This paper introduces
GCAT. University of Michigan-Dearborn
 GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
The VisLab Intercontinental Autonomous Challenge: 13,000 km, 3 months, no driver
 The VisLab Intercontinental Autonomous Challenge: 13,000 km, 3 months, no driver M.Bertozzi, L.Bombini, A.Broggi, M.Buzzoni, E.Cardarelli, S.Cattani, P.Cerri, S.Debattisti,. R.I.Fedriga, M.Felisa, L.Gatti,
The VisLab Intercontinental Autonomous Challenge: 13,000 km, 3 months, no driver M.Bertozzi, L.Bombini, A.Broggi, M.Buzzoni, E.Cardarelli, S.Cattani, P.Cerri, S.Debattisti,. R.I.Fedriga, M.Felisa, L.Gatti,
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
The DARPA Grand Challenge: Ten Years Later
 I of6 1 0/?.?./?.014 ll 'i7 AM 2014/03/13 The DARPA Grand Challenge: Ten Years Later http://www.darpa.mil/newsevents/releases/2014/03/ 13.aspx The DARPA Grand Challenge: Ten Years Later March 13, 2014
I of6 1 0/?.?./?.014 ll 'i7 AM 2014/03/13 The DARPA Grand Challenge: Ten Years Later http://www.darpa.mil/newsevents/releases/2014/03/ 13.aspx The DARPA Grand Challenge: Ten Years Later March 13, 2014
Automated Driving is the declared goal of the automotive industry. Systems evolve from complicated to complex
 Automated Driving is the declared goal of the automotive industry Systems evolve from complicated to complex Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity
Automated Driving is the declared goal of the automotive industry Systems evolve from complicated to complex Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity
Cooperative Autonomous Driving and Interaction with Vulnerable Road Users
 9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
SAFERIDER Project FP SAFERIDER Andrea Borin November 5th, 2010 Final Event & Demonstration Leicester, UK
 SAFERIDER Project FP7-216355 SAFERIDER Advanced Rider Assistance Systems Andrea Borin andrea.borin@ymre.yamaha-motor.it ARAS: Advanced Rider Assistance Systems Speed Alert Curve Frontal Collision Intersection
SAFERIDER Project FP7-216355 SAFERIDER Advanced Rider Assistance Systems Andrea Borin andrea.borin@ymre.yamaha-motor.it ARAS: Advanced Rider Assistance Systems Speed Alert Curve Frontal Collision Intersection
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF
 AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help?
 Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
Oakland University Presents:
 Oakland University Presents: I certify that the engineering design present in this vehicle is significant and equivalent to work that would satisfy the requirements of a senior design or graduate project
Oakland University Presents: I certify that the engineering design present in this vehicle is significant and equivalent to work that would satisfy the requirements of a senior design or graduate project
Environmental Envelope Control
 Environmental Envelope Control May 26 th, 2014 Stanford University Mechanical Engineering Dept. Dynamic Design Lab Stephen Erlien Avinash Balachandran J. Christian Gerdes Motivation New technologies are
Environmental Envelope Control May 26 th, 2014 Stanford University Mechanical Engineering Dept. Dynamic Design Lab Stephen Erlien Avinash Balachandran J. Christian Gerdes Motivation New technologies are
On the role of AI in autonomous driving: prospects and challenges
 On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
EB TechPaper. Staying in lane on highways with EB robinos. elektrobit.com
 EB TechPaper Staying in lane on highways with EB robinos elektrobit.com Highly automated driving (HAD) raises the complexity within vehicles tremendously due to many different components that need to be
EB TechPaper Staying in lane on highways with EB robinos elektrobit.com Highly automated driving (HAD) raises the complexity within vehicles tremendously due to many different components that need to be
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS
 EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
China Intelligent Connected Vehicle Technology Roadmap 1
 China Intelligent Connected Vehicle Technology Roadmap 1 Source: 1. China Automotive Engineering Institute, , Oct. 2016 1 Technology Roadmap 1 General
China Intelligent Connected Vehicle Technology Roadmap 1 Source: 1. China Automotive Engineering Institute, , Oct. 2016 1 Technology Roadmap 1 General
Technical Paper DARPA Grand Challenge 2005
 Technical Paper DARPA Grand Challenge 2005 Team UCF University of Central Florida 4000 Central Florida Blvd. Orlando, FL 32816 Phone: 407 823-2341 Team Leader: Don Harper harper@cs.ucf.edu Team Members:
Technical Paper DARPA Grand Challenge 2005 Team UCF University of Central Florida 4000 Central Florida Blvd. Orlando, FL 32816 Phone: 407 823-2341 Team Leader: Don Harper harper@cs.ucf.edu Team Members:
Automated Driving: Design and Verify Perception Systems
 Automated Driving: Design and Verify Perception Systems Giuseppe Ridinò 2015 The MathWorks, Inc. 1 Some common questions from automated driving engineers 1011010101010100101001 0101010100100001010101 0010101001010100101010
Automated Driving: Design and Verify Perception Systems Giuseppe Ridinò 2015 The MathWorks, Inc. 1 Some common questions from automated driving engineers 1011010101010100101001 0101010100100001010101 0010101001010100101010
Problem Definition Review
 Problem Definition Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team Agenda Background Problem Statement Stakeholders Use Scenario Customer Requirements Engineering Requirements Preliminary Schedule
Problem Definition Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team Agenda Background Problem Statement Stakeholders Use Scenario Customer Requirements Engineering Requirements Preliminary Schedule
The Ben Franklin Racing Team and the DARPA Urban Challenge
 The Ben Franklin Racing Team and the DARPA Urban Challenge Jon Bohren, Jason Derenick, Tully Foote, Jim Keller, Alex Kushleyev, Daniel Lee, Brian Satterfield, John Spletzer, Alex Stewart, Paul Vernaza
The Ben Franklin Racing Team and the DARPA Urban Challenge Jon Bohren, Jason Derenick, Tully Foote, Jim Keller, Alex Kushleyev, Daniel Lee, Brian Satterfield, John Spletzer, Alex Stewart, Paul Vernaza
Table of Contents. Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.
 Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.") March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
University of Michigan s Work Toward Autonomous Cars
 University of Michigan s Work Toward Autonomous Cars RYAN EUSTICE NAVAL ARCHITECTURE & MARINE ENGINEERING MECHANICAL ENGINEERING, AND COMPUTER SCIENCE AND ENGINEERING Roadmap Why automated driving? Next
University of Michigan s Work Toward Autonomous Cars RYAN EUSTICE NAVAL ARCHITECTURE & MARINE ENGINEERING MECHANICAL ENGINEERING, AND COMPUTER SCIENCE AND ENGINEERING Roadmap Why automated driving? Next
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition
 Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Raj Rajkumar Professor, Carnegie Mellon University Co-Director, GM-CMU Vehicular IT Lab Co-Director, GM-CMU Autonomous Driving Lab
 Raj Rajkumar Professor, Carnegie Mellon University Co-Director, GM-CMU Vehicular IT Lab Co-Director, GM-CMU Autonomous Driving Lab http://www.ece.cmu.edu/~raj raj@ece.cmu.edu In Global Volume Opportunity
Raj Rajkumar Professor, Carnegie Mellon University Co-Director, GM-CMU Vehicular IT Lab Co-Director, GM-CMU Autonomous Driving Lab http://www.ece.cmu.edu/~raj raj@ece.cmu.edu In Global Volume Opportunity
Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions
 Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions GTC Europe 2017 Dominik Dörr 2 Motivation Virtual Prototypes Virtual Sensor Models CarMaker and NVIDIA DRIVE PX
Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions GTC Europe 2017 Dominik Dörr 2 Motivation Virtual Prototypes Virtual Sensor Models CarMaker and NVIDIA DRIVE PX
Embedding Technology in Transportation Courses Symposium on Active Student Engagement in Civil and Transportation Engineering
 Embedding Technology in Transportation Courses Symposium on Active Student Engagement in Civil and Transportation Engineering Louisiana Tech University, Ruston, LA July 24-26, 2016 Overview Introduction
Embedding Technology in Transportation Courses Symposium on Active Student Engagement in Civil and Transportation Engineering Louisiana Tech University, Ruston, LA July 24-26, 2016 Overview Introduction
Evaluation of Autonomous Ground Vehicle Skills
 Evaluation of Autonomous Ground Vehicle Skills Phillip L. Koon CMU-RI -TR- 06-13 The Robotics Institute Carnegie Mellon University Pittsburgh, Pennsylvania 15213 March 2006 2006 Carnegie Mellon University
Evaluation of Autonomous Ground Vehicle Skills Phillip L. Koon CMU-RI -TR- 06-13 The Robotics Institute Carnegie Mellon University Pittsburgh, Pennsylvania 15213 March 2006 2006 Carnegie Mellon University
Team CIMAR DARPA Grand Challenge 2005 Sponsored by Smiths Aerospace
 Team CIMAR DARPA Grand Challenge 2005 Sponsored by Smiths Aerospace University of Florida Dr. Carl Crane David Armstrong Maryum Ahmed Tom Galluzzo Greg Garcia Danny Kent Jaesang Lee Shannon Ridgeway Sanjay
Team CIMAR DARPA Grand Challenge 2005 Sponsored by Smiths Aerospace University of Florida Dr. Carl Crane David Armstrong Maryum Ahmed Tom Galluzzo Greg Garcia Danny Kent Jaesang Lee Shannon Ridgeway Sanjay
Virginia Department of Education
 Virginia Department of Education Module Three Transparencies Basic Maneuvering Tasks: Low Risk Environment Topic 1 -- Basic Maneuvers Topic 2 -- Vision and Perception Topic 3 -- Controlling Risk Using
Virginia Department of Education Module Three Transparencies Basic Maneuvering Tasks: Low Risk Environment Topic 1 -- Basic Maneuvers Topic 2 -- Vision and Perception Topic 3 -- Controlling Risk Using
ENGINEERING FOR HUMANS STPA ANALYSIS OF AN AUTOMATED PARKING SYSTEM
 ENGINEERING FOR HUMANS STPA ANALYSIS OF AN AUTOMATED PARKING SYSTEM Massachusetts Institute of Technology John Thomas Megan France General Motors Charles A. Green Mark A. Vernacchia Padma Sundaram Joseph
ENGINEERING FOR HUMANS STPA ANALYSIS OF AN AUTOMATED PARKING SYSTEM Massachusetts Institute of Technology John Thomas Megan France General Motors Charles A. Green Mark A. Vernacchia Padma Sundaram Joseph
Intuitive Driving: Are We There Yet? Amine Taleb, Ph.D. February 2014 I 1
 Intuitive Driving: Are We There Yet? Amine Taleb, Ph.D. February 2014 I 1 February 2014 Outline Motivation Towards Connected/Automated Driving Valeo s Technologies and Perspective Automated Driving Connected
Intuitive Driving: Are We There Yet? Amine Taleb, Ph.D. February 2014 I 1 February 2014 Outline Motivation Towards Connected/Automated Driving Valeo s Technologies and Perspective Automated Driving Connected
RB-Mel-03. SCITOS G5 Mobile Platform Complete Package
 RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
n the predawn hours of Saturday, November
 s Latest Robotic Competition Focuses on Urban Environment By Scott R. Gourley n the predawn hours of Saturday, November 3, 2007, the former George Air Force Base, in Victorville, Calif., was a beehive
s Latest Robotic Competition Focuses on Urban Environment By Scott R. Gourley n the predawn hours of Saturday, November 3, 2007, the former George Air Force Base, in Victorville, Calif., was a beehive
This is the technical paper required by the rules of the DARPA Grand Challenge Competition for 2004.
 This is the technical paper required by the rules of the DARPA Grand Challenge Competition for 004. Submitted by Team Overbot 68 Middlefield Rd, Unit N Redwood City, CA 94063 info@overbot.com 650-36-909
This is the technical paper required by the rules of the DARPA Grand Challenge Competition for 004. Submitted by Team Overbot 68 Middlefield Rd, Unit N Redwood City, CA 94063 info@overbot.com 650-36-909
Detailed Design Review
 Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
Citi's 2016 Car of the Future Symposium
 Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
Team Jefferson. DARPA Urban Challenge Technical Paper. June 1, Author Paul J. Perrone CEO
 Team Jefferson DARPA Urban Challenge 2007 Technical Paper June 1, 2007 Author Paul J. Perrone CEO pperrone@perronerobotics.com P.O. Box 4698; Charlottesville, Virginia 22905 (434) 823-2833 (Work) (434)
Team Jefferson DARPA Urban Challenge 2007 Technical Paper June 1, 2007 Author Paul J. Perrone CEO pperrone@perronerobotics.com P.O. Box 4698; Charlottesville, Virginia 22905 (434) 823-2833 (Work) (434)
Rover Systems Rover Systems 02/29/04
 Rover Systems Rover Systems 02/29/04 ted@roversystems.com Disclaimer: The views, opinions, and/or findings contained in this paper are those of the participating team and should not be interpreted as representing
Rover Systems Rover Systems 02/29/04 ted@roversystems.com Disclaimer: The views, opinions, and/or findings contained in this paper are those of the participating team and should not be interpreted as representing
DYNA4 Open Simulation Framework with Flexible Support for Your Work Processes and Modular Simulation Model Library
 Open Simulation Framework with Flexible Support for Your Work Processes and Modular Simulation Model Library DYNA4 Concept DYNA4 is an open and modular simulation framework for efficient working with simulation
Open Simulation Framework with Flexible Support for Your Work Processes and Modular Simulation Model Library DYNA4 Concept DYNA4 is an open and modular simulation framework for efficient working with simulation
Le développement technique des véhicules autonomes
 Shaping the future Le développement technique des véhicules autonomes Renaud Dubé, Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Fribourg, 23 Juin 2016 Renaud Dubé 23.06.2016 1 Content
Shaping the future Le développement technique des véhicules autonomes Renaud Dubé, Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Fribourg, 23 Juin 2016 Renaud Dubé 23.06.2016 1 Content
Automatic Air Collision Avoidance System. Auto-ACAS. Mark A. Skoog Dryden Flight Research Center - NASA. AutoACAS. Dryden Flight Research Center
 Automatic Air Collision Avoidance System Auto-ACAS Mark A. Skoog - NASA Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information is estimated
Automatic Air Collision Avoidance System Auto-ACAS Mark A. Skoog - NASA Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information is estimated
WHITE PAPER Autonomous Driving A Bird s Eye View
 WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
The MITRE Meteorites 2005 DARPA Grand Challenge Entry
 The MITRE Meteorites 2005 DARPA Grand Challenge Entry Robert Bolling (rbolling@mitre.org) Robert Grabowski, Ph.D. (rgrabowski@mitre.org) Ann Jones (adjones@mitre.org) Mike Shadid (mshadid@mitre.org) Richard
The MITRE Meteorites 2005 DARPA Grand Challenge Entry Robert Bolling (rbolling@mitre.org) Robert Grabowski, Ph.D. (rgrabowski@mitre.org) Ann Jones (adjones@mitre.org) Mike Shadid (mshadid@mitre.org) Richard
Deep Learning Will Make Truly Self-Driving Cars a Reality
 Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Prototyping Collision Avoidance for suas
 Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017
 IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017 AUTOMATED DRIVING OPENS NEW OPPORTUNITIES FOR CUSTOMERS AND COMMUNITY. MORE SAFETY MORE COMFORT MORE FLEXIBILITY MORE
IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017 AUTOMATED DRIVING OPENS NEW OPPORTUNITIES FOR CUSTOMERS AND COMMUNITY. MORE SAFETY MORE COMFORT MORE FLEXIBILITY MORE
Florida Department of Education Curriculum Framework Grades 9 12, ADULT. Subject Area: Safety and Driver Education
 Florida Department of Education Curriculum Framework Grades 9 12, ADULT Subject Area: Safety and Driver Education Course Number: 1900300 Course Title: Driver Education/Traffic Safety Classroom Credit:.5
Florida Department of Education Curriculum Framework Grades 9 12, ADULT Subject Area: Safety and Driver Education Course Number: 1900300 Course Title: Driver Education/Traffic Safety Classroom Credit:.5
The MathWorks Crossover to Model-Based Design
 The MathWorks Crossover to Model-Based Design The Ohio State University Kerem Koprubasi, Ph.D. Candidate Mechanical Engineering The 2008 Challenge X Competition Benefits of MathWorks Tools Model-based
The MathWorks Crossover to Model-Based Design The Ohio State University Kerem Koprubasi, Ph.D. Candidate Mechanical Engineering The 2008 Challenge X Competition Benefits of MathWorks Tools Model-based
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE. CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development
 AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE. Alex Haag Munich,
 REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE Alex Haag Munich, 10.10.2017 10/9/17 Regulatory Approval of an AI-based Autonomous Vehicle 2 1 INTRO Autonomous Intelligent Driving, GmbH Launched
REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE Alex Haag Munich, 10.10.2017 10/9/17 Regulatory Approval of an AI-based Autonomous Vehicle 2 1 INTRO Autonomous Intelligent Driving, GmbH Launched
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY
 UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
Club Capra- Minotaurus Design Report
 Table of content Introduction... 3 Team... 3 Cost... 4 Mechanical design... 4 Structure of Minotaurus... 5 Drive train... 6 Electronics... 7 Batteries... 7 Power supply... 7 System signal processing...
Table of content Introduction... 3 Team... 3 Cost... 4 Mechanical design... 4 Structure of Minotaurus... 5 Drive train... 6 Electronics... 7 Batteries... 7 Power supply... 7 System signal processing...
Our Approach to Automated Driving System Safety. February 2019
 Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
Financial Planning Association of Michigan 2018 Fall Symposium Autonomous Vehicles Presentation
 Financial Planning Association of Michigan 2018 Fall Symposium Autonomous s Presentation 1 Katherine Ralston Program Manager, Autonomous s 2 FORD SECRET Why Autonomous s Societal Impact Great potential
Financial Planning Association of Michigan 2018 Fall Symposium Autonomous s Presentation 1 Katherine Ralston Program Manager, Autonomous s 2 FORD SECRET Why Autonomous s Societal Impact Great potential
Junior: The Stanford Entry in the Urban Challenge
 Junior: The Stanford Entry in the Urban Challenge Michael Montemerlo 1, Jan Becker 4, Suhrid Bhat 2, Hendrik Dahlkamp 1, Dmitri Dolgov 1, Scott Ettinger 3, Dirk Haehnel 1, Tim Hilden 2, Gabe Hoffmann 1,
Junior: The Stanford Entry in the Urban Challenge Michael Montemerlo 1, Jan Becker 4, Suhrid Bhat 2, Hendrik Dahlkamp 1, Dmitri Dolgov 1, Scott Ettinger 3, Dirk Haehnel 1, Tim Hilden 2, Gabe Hoffmann 1,
Leveraging AI for Self-Driving Cars at GM. Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel
 Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
Urban Challenge. Innovation Seedbed for 3D Laser Scanning
 DARPA Urban Challenge Innovation Seedbed for 3D Laser Scanning Boss, the $2 million first-prize winner. Carnegie Mellon/GM Tartan Racing Team LaserScanning he final round of the DARPA Urban Challenge took
DARPA Urban Challenge Innovation Seedbed for 3D Laser Scanning Boss, the $2 million first-prize winner. Carnegie Mellon/GM Tartan Racing Team LaserScanning he final round of the DARPA Urban Challenge took
Towards Realizing Autonomous Driving Based on Distributed Decision Making for Complex Urban Environments
 Towards Realizing Autonomous Driving Based on Distributed Decision Making for Complex Urban Environments M.Sc. Elif Eryilmaz on behalf of Prof. Dr. Dr. h.c. Sahin Albayrak Digital Mobility Our vision Intelligent
Towards Realizing Autonomous Driving Based on Distributed Decision Making for Complex Urban Environments M.Sc. Elif Eryilmaz on behalf of Prof. Dr. Dr. h.c. Sahin Albayrak Digital Mobility Our vision Intelligent
The Self-Driving Network : How to Realize It Kireeti Kompella, CTO, Engineering
 The Self-Driving Network : How to Realize It Kireeti Kompella, CTO, Engineering The Self-Driving Network In March 2016, I presented the vision of a Self-Driving Network an automated, fully autonomous network
The Self-Driving Network : How to Realize It Kireeti Kompella, CTO, Engineering The Self-Driving Network In March 2016, I presented the vision of a Self-Driving Network an automated, fully autonomous network
Program Overview. Chris Mocnik Robotic Vehicle Control Architecture for FCS ATO Manager U.S. Army RDECOM TARDEC
 RoboticVehicleControl Architecture for FCS Program Overview Chris Mocnik Robotic Vehicle Control Architecture for FCS ATO Manager U.S. Army RDECOM TARDEC Vehicle Electronics and Architecture Office UNCLASSIFIED:
RoboticVehicleControl Architecture for FCS Program Overview Chris Mocnik Robotic Vehicle Control Architecture for FCS ATO Manager U.S. Army RDECOM TARDEC Vehicle Electronics and Architecture Office UNCLASSIFIED:
Junior: The Stanford Entry in the Urban Challenge
 See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/227506544 Junior: The Stanford Entry in the Urban Challenge Article in Journal of Field Robotics
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/227506544 Junior: The Stanford Entry in the Urban Challenge Article in Journal of Field Robotics
Faculty Advisor Statement. Penn State Robotics Club
 Al Penn State Robotics Club Faculty Advisor Statement I, Sean N. Brennan, certify that the design and development of Al has been significant, and that each student performing this work is a registered
Al Penn State Robotics Club Faculty Advisor Statement I, Sean N. Brennan, certify that the design and development of Al has been significant, and that each student performing this work is a registered
Unmanned Surface Vessels - Opportunities and Technology
 Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
1 INTRODUCTION 2 DESIGN PROCESS. 2.1 Target Customers
 The Virginia Tech Autonomous Vehicle Team presents: Required Faculty Advisor Statement I certify that the engineering design of the updated vehicle described in this report, Johnny-5, has been significant,
The Virginia Tech Autonomous Vehicle Team presents: Required Faculty Advisor Statement I certify that the engineering design of the updated vehicle described in this report, Johnny-5, has been significant,
Festival Nacional de Robótica - Portuguese Robotics Open. Rules for Autonomous Driving. Sociedade Portuguesa de Robótica
 Festival Nacional de Robótica - Portuguese Robotics Open Rules for Autonomous Driving Sociedade Portuguesa de Robótica 2017 Contents 1 Introduction 1 2 Rules for Robot 2 2.1 Dimensions....................................
Festival Nacional de Robótica - Portuguese Robotics Open Rules for Autonomous Driving Sociedade Portuguesa de Robótica 2017 Contents 1 Introduction 1 2 Rules for Robot 2 2.1 Dimensions....................................
DARPA Urban Challenge Technical Report. Austin Robot Technology
 DARPA Urban Challenge Technical Report Austin Robot Technology Team Leader: Dave Tuttle {dave@austinrobot.com} Project Management: Dave Tuttle University of Texas at Austin Contact: Prof. Peter Stone {pstone@cs.utexas.edu}
DARPA Urban Challenge Technical Report Austin Robot Technology Team Leader: Dave Tuttle {dave@austinrobot.com} Project Management: Dave Tuttle University of Texas at Austin Contact: Prof. Peter Stone {pstone@cs.utexas.edu}
Freescale Cup Competition. Abdulahi Abu Amber Baruffa Mike Diep Xinya Zhao. Author: Amber Baruffa
 Freescale Cup Competition The Freescale Cup is a global competition where student teams build, program, and race a model car around a track for speed. Abdulahi Abu Amber Baruffa Mike Diep Xinya Zhao The
Freescale Cup Competition The Freescale Cup is a global competition where student teams build, program, and race a model car around a track for speed. Abdulahi Abu Amber Baruffa Mike Diep Xinya Zhao The
CONNECTED AUTOMATION HOW ABOUT SAFETY?
 CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
CS 188: Artificial Intelligence
 CS 188: Artificial Intelligence Advanced Applications: Robotics Pieter Abbeel UC Berkeley A few slides from Sebastian Thrun, Dan Klein 2 So Far Mostly Foundational Methods 3 1 Advanced Applications 4 Autonomous
CS 188: Artificial Intelligence Advanced Applications: Robotics Pieter Abbeel UC Berkeley A few slides from Sebastian Thrun, Dan Klein 2 So Far Mostly Foundational Methods 3 1 Advanced Applications 4 Autonomous
Journal of Emerging Trends in Computing and Information Sciences
 Pothole Detection Using Android Smartphone with a Video Camera 1 Youngtae Jo *, 2 Seungki Ryu 1 Korea Institute of Civil Engineering and Building Technology, Korea E-mail: 1 ytjoe@kict.re.kr, 2 skryu@kict.re.kr
Pothole Detection Using Android Smartphone with a Video Camera 1 Youngtae Jo *, 2 Seungki Ryu 1 Korea Institute of Civil Engineering and Building Technology, Korea E-mail: 1 ytjoe@kict.re.kr, 2 skryu@kict.re.kr
Listed in category: ebay Motors > Other Vehicles > Race Cars (Not Street Legal) > Off-Road. Bidder or seller of this item? Sign in for your status
 > Off-Road. Bidder or seller of this item? Sign in for your status") ebay home pay my ebay sign in site map help Back to home page Listed in category: ebay Motors > Other Vehicles > Race Cars (Not Street Legal) > Off-Road ROBOT Car - Autonomous Vehicle- A Very Unique Car
ebay home pay my ebay sign in site map help Back to home page Listed in category: ebay Motors > Other Vehicles > Race Cars (Not Street Legal) > Off-Road ROBOT Car - Autonomous Vehicle- A Very Unique Car
Technical Paper for Team Tormenta. DARPA Grand Challenge 2005
 Technical Paper for Team Tormenta DARPA Grand Challenge 2005 August 29, 2005 Benjamin L. Raskob, Univ. of Southern California, raskob@usc.edu Joseph Bebel, Univ. of Southern California, bebel@usc.edu Alice
Technical Paper for Team Tormenta DARPA Grand Challenge 2005 August 29, 2005 Benjamin L. Raskob, Univ. of Southern California, raskob@usc.edu Joseph Bebel, Univ. of Southern California, bebel@usc.edu Alice
Sabertooth A Hybrid AUV/ROV offshore system. Jan Siesjö Chief Engineer
 Sabertooth A Hybrid AUV/ROV offshore system Jan Siesjö Chief Engineer jan.siesjo@saabgroup.com SAAB WORLDWIDE Employees 2010 Sweden 10,372 South Africa 1,086 Australia 349 USA 194 Great Britain 117 Finland
Sabertooth A Hybrid AUV/ROV offshore system Jan Siesjö Chief Engineer jan.siesjo@saabgroup.com SAAB WORLDWIDE Employees 2010 Sweden 10,372 South Africa 1,086 Australia 349 USA 194 Great Britain 117 Finland
An overview of the on-going OSU instrumented probe vehicle research
 An overview of the on-going OSU instrumented probe vehicle research Benjamin Coifman, PhD Associate Professor The Ohio State University Department of Civil, Environmental, and Geodetic Engineering Department
An overview of the on-going OSU instrumented probe vehicle research Benjamin Coifman, PhD Associate Professor The Ohio State University Department of Civil, Environmental, and Geodetic Engineering Department
CSE 352: Self-Driving Cars. Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark
 CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
Highly Automated Driving: Fiction or Future?
 The future of driving. Final Event Highly Automated Driving: Fiction or Future? Prof. Dr. Jürgen Leohold Volkswagen Group Research Motivation The driver as the unpredictable factor: Human error is the
The future of driving. Final Event Highly Automated Driving: Fiction or Future? Prof. Dr. Jürgen Leohold Volkswagen Group Research Motivation The driver as the unpredictable factor: Human error is the
ROBOTAXI CONTEST TERMS AND CONDITIONS
 ROBOTAXI CONTEST TERMS AND CONDITIONS 1. Purpose Autonomous vehicles are no longer imaginary concepts as they were depicted in the 90s science fiction series. Today, many technology companies are conducting
ROBOTAXI CONTEST TERMS AND CONDITIONS 1. Purpose Autonomous vehicles are no longer imaginary concepts as they were depicted in the 90s science fiction series. Today, many technology companies are conducting