Autonomous Mobile Robots and Intelligent Control Issues. Sven Seeland
|
|
|
- Collin Butler
- 6 years ago
- Views:
Transcription
1 Autonomous Mobile Robots and Intelligent Control Issues Sven Seeland
2 Overview Introduction Motivation History of Autonomous Cars DARPA Grand Challenge History and Rules Controlling Autonomous Cars MIT Talos Overview Intelligent Control Systems Controlling Talos 2
3 Mobile Robots Motivations Can work under hostile environmental conditions Can move in confined spaces Expendable in dangerous situations 3
4 Autonomy Definition 1 Autonomy refers to systems capable of operating in the real-world environment without any form of external control for extended periods of time. George A. Bekey, Autonomous Robots: from biological inspiration to implementation and control 4
5 Autonomy Definition 2 A fully autonomous robot has the ability to Gain information about the environment. Work for an extended period without human intervention. Move either all or part of itself throughout its operating environment without human assistance. Avoid situations that are harmful to people, property, or itself unless those are part of its design specifications. - Wikipedia, Autonomous robot 5
6 Autonomy Motivations Remote control might be infeasible Area too large or cluttered for wired control Poor wireless reception No operator required Cheap operation of many units No set working hours No fatigue 6
7 Autonomous Mobile Robots Applications Clearing an area of landmines, bombs and other explosives Rescue robots Service Robots Maintenance Robots Exploration Toys Automated Driving... 7

8 Autonomous Cars Motivation Public Transport Safer Driving More comfortable traveling Delivery Tasks... 8
9 Overview Introduction Motivation History of Autonomous Cars DARPA Grand Challenge History and Rules Controlling Autonomous Cars MIT Talos Overview Intelligent Control Systems Controlling Talos 9
10 Autonomous Cars History PROMETHEUS Project ( ) Initiated by the European Commission PROgraMme for a European Traffic of Highest Efficiency and Unprecedented Safety $1 billion funding Most prominent results where VaMP and ARGO 10

11 Autonomous Cars History VaMP (1995) Versuchsfahrzeug für autonome Mobilität PKW >2000 km from Munich to Kopenhagen and back in normal traffic Up to 180 km/h Up to 158 km without human intervention Mean distance between human interventions: 9 km Lane changes Vehicle passing Active computer vision Radar 11


12 Autonomous Cars History ARGO Project (1998) 2000 km Tour through Italy Above 90% of the time in automatic mode Longest distance without intervention: 54.3 km Two cameras 200 MHz Pentium MMX 12
13 Overview Introduction Motivation History of Autonomous Cars DARPA Grand Challenge History and Rules Controlling Autonomous Cars MIT Talos Overview Intelligent Control Systems Controlling Talos 13


14 DARPA Grand Challenge - History Motivation: Make one-third of ground military forces autonomous by 2015 Off-road tracks 2004: 241 km $1 Million prize money no winner Best vehicle travelled 11,78 km 2005: 213 km $2 Million prize money 5 vehicles succeed All but one got past the maximum distance of

15 DARPA Urban Challenge 2007 Rules 1 $2 Million, $1 Million and $ prizes Complete 60 miles in 6 hours to finish the race Urban environment Decommissioned Air Force Base Street network in residential area Several dirt roads Obey traffic laws All cars on the course at the same time 3 individual missions per car No pedestrians or other moving objects Time penalties for dangerous or erroneous behavior 15
16 DARPA Urban Challenge 2007 Rules 2 One Route Network Definition File (RNDF) Handed out 24 hours before the race Similar to maps used in GPS navigation systems Contains road positions, number of lanes, intersections, parking space locations in GPS coordinates One Mission Description File per Team and Mission (MDF) Handed out on the day of the event Contains a list of checkpoints from the RNDF that the vehicle needs to cross 16
17 Overview Introduction Motivation History of Autonomous Cars DARPA Grand Challenge History Rules Controlling Autonomous Cars MIT Talos Overview Intelligent Control Systems Controlling Talos 17





18 MIT Talos 18
19 MIT Talos Design Considerations Many low-cost sensors Increases perception robustness More complete coverage Higher efficiency in a multi-processor environment Minimal reliance on GPS data Highly distributed computer Better reaction times Downside: higher power consumption Simple low level controls Improve robustness Minimal sensor fusion / asynchronous sensor update 19
 Velodyne HDL-64 LIDAR (3D) 12 SICK LIDARs (2D) 5 cameras (752x480, 22.")
20 MIT Talos Specifications Land Rover LR3 Human drivable EMC AEVIT drive-by-wire system 6000 Watts power generator 2 ruggedized UPS Blade Cluster (10 x 4 64-bit CPUs, 2.3 GHz each) Velodyne HDL-64 LIDAR (3D) 12 SICK LIDARs (2D) 5 cameras (752x480, 22.8 images per second) 15 millimeter wave radars Applanix navigation solution (GPS, inertial measurement unit and wheel encoder) 20
21 Overview Introduction Motivation History of Autonomous Cars DARPA Grand Challenge History Rules Controlling Autonomous Cars MIT Talos Overview Intelligent Control Systems Controlling Talos 21
22 Intelligent Control Systems Tasks Actuation Collision avoidance Path-finding / Trajectory planning Mission planning Localization 22
23 Intelligent Control Systems Challenges Uncertainty Dynamic environment Perception Actuation Efficiency Short reaction times in a dynamic environment Limited processing power due to limited space on the moving platform Scalability Potentially huge environment Potentially long operating times 23
24 Intelligent Control Systems Requirements Robustness Input is likely to be inaccurate, incomplete or wrong Unforeseen conditions are likely to occur Speed Quickly react to situations Initial assumptions may be invalid by the time the deliberation process is finished Versatility Multitude of tasks need to be executed simultaneously Highly diverse nature of tasks 24
25 Intelligent Control Systems Basics Control Systems consist of: Input Controller Output Input Controller Output 25
26 Intelligent Control Systems Reactive Systems Purely reactive systems: No planning or learning No internal state Complexity of tasks is limited Highly robust Very quick reaction times Perception Decision Action World 26
27 Intelligent Control Systems Deliberative Systems Deliberative Systems Allows for planning and learning Internal world model Can perform very complex tasks Not very robust Slow Programming Model Building Knowledge Decision Making Reasoning Perception Decisions Actions World 27
28 Intelligent Control Systems Hybrid Systems 1 Hybrid Systems Combination of systems Reactive systems for short term reactions and low level controls Deliberative systems for planning and coordination Model Building Programming Knowledge Decision Making Reasoning Perception Decisions Actions World 28
29 Intelligent Control Systems Hybrid Systems Oftentimes organized in three layers Planning layer handles long time action plans Sequencing divides long term goals into smaller steps Controlling translates those steps into actual actuator commands Planning Sequencing Layers operate in parallel and independently Low layers can fail and report failure to higher layers Controlling Higher layers tend to use deliberative approaches Lower layers tend to use reactive approaches 29
30 Overview Introduction Motivation History of Autonomous Cars DARPA Grand Challenge History Rules Controlling Autonomous Cars MIT Talos Overview Intelligent Control Systems Controlling Talos 30
31 MIT Talos Control System Architecture 31
32 MIT Talos IPC Infrastructure LCM lightweight communications and marshaling Minimalist system for real-time applications Developed specifically for Talos Based on UDP-Multicast Publish/subscribe message-passing model Logging made extremely easy Freely available 32
33 MIT Talos Control System Architecture 33
34 MIT Talos Navigator 1 Highest level of abstraction General planning component Route planning Intersection handling (precedence, crossing, merging) Passing Blockage replanning Turn signaling Failsafe timers Inputs: MDF, lane information, vehicle pose Outputs: goals for motion planner Short term goals within 40-50m range Goal is moved according to the high level intentions Timing of the goal-setting used to control motion 34
35 MIT Talos Navigator 2 Reevaluates situation at 2 Hz Dynamic replanning comes for free Passing Goal remains unchanged Checks if other lane exists and is free Allows the motion planner to use the other lane Two timers for global problem solving: Failsafe timer Progressively sets and unsets global failsafe states Failsafe states progressively relax security constraints Blockage time Determines traffic jams and roadblocks Only works in two-lane roads where a u-turn is possible 35
36 MIT Talos Control System Architecture 36

37 MIT Talos Drivability Map 1 Interface to perceptual data Influenced by the failsafe states set by the navigator Input: Sensory data Output: A map, indicating the feasibility of certain paths for the motion planner Contains: Infeasible regions Restricted regions High cost regions 37

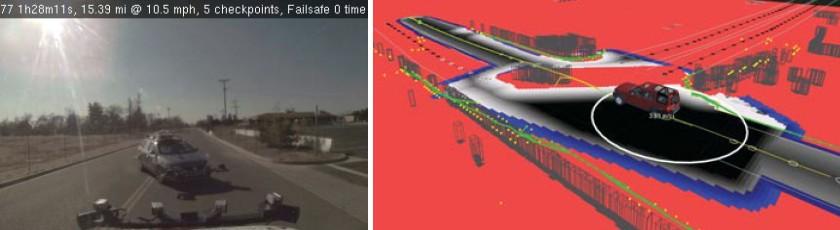
38 MIT Talos Drivability Map 2 38
39 MIT Talos Control System Architecture 39

40 MIT Talos Motion Planner Short term path planning Input: RNDF goals and situational data from the Navigator, Drivability Map Output: Path and Speed commands for the Controller Output is sent at 10 Hz Rapidly-exploring Random Tree Generate semi-random waypoints Iterate over those waypoints Generate a trajectory using closed-loop dynamics Check the trajectory for feasibility 40

41 MIT Talos Control System Architecture 41
42 MIT Talos - Controller Controls the vehicle Generates gas, brake, steering and gearshift commands Two Controllers Pure-Pursuit controller for steering Two different controllers for forward and reverse steering Proportional-Integral controller for speed Steering lookahead is based on current commanded speed Commanded speed is based on vehicle location 42
43 References Leonard, J., How, J., Teller, S. et al. A perception-driven autonomous urban vehicle. In: Journal of Field Robotics, 25 (2008) Nr. 10, p DARPA, DARPA Urban Challenge Website, (2007) Team MIT (2007), Technical Report DARPA Urban Challenge, (2007) Stenzel, R.: Steuerungsarchitekturen für autonome mobile Roboter, Aachen, RWTH, Dissertation, Wikipedia: DARPA Grand Challenge. (2009, December 30) Wikipedia: Autonome mobile Roboter. (2009, November 21) Wikipedia: VaMP. (2009, December 14) ARGO Project Homepage, Univ.-Prof. Dr.-Ing. Ernst Dieter Dickmanns, Forschungsbericht bis , (2002) 43
44 Thank you for your attention! 43
Introduction Projects Basic Design Perception Motion Planning Mission Planning Behaviour Conclusion. Autonomous Vehicles
 Dipak Chaudhari Sriram Kashyap M S 2008 Outline 1 Introduction 2 Projects 3 Basic Design 4 Perception 5 Motion Planning 6 Mission Planning 7 Behaviour 8 Conclusion Introduction Unmanned Vehicles: No driver
Dipak Chaudhari Sriram Kashyap M S 2008 Outline 1 Introduction 2 Projects 3 Basic Design 4 Perception 5 Motion Planning 6 Mission Planning 7 Behaviour 8 Conclusion Introduction Unmanned Vehicles: No driver
Cooperative Autonomous Driving and Interaction with Vulnerable Road Users
 9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
Odin s Journey. Development of Team Victor Tango s Autonomous Vehicle for the DARPA Urban Challenge. Jesse Hurdus. Dennis Hong. December 9th, 2007
 Odin s Journey Development of Team Victor Tango s Autonomous Vehicle for the DARPA Urban Challenge Dennis Hong Assistant Professor Robotics & Mechanisms Laboratory (RoMeLa) dhong@vt.edu December 9th, 2007
Odin s Journey Development of Team Victor Tango s Autonomous Vehicle for the DARPA Urban Challenge Dennis Hong Assistant Professor Robotics & Mechanisms Laboratory (RoMeLa) dhong@vt.edu December 9th, 2007
Unmanned autonomous vehicles in air land and sea
 based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS
 MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
Vehicles at Volkswagen
 Autonomous Driving and Intelligent Vehicles at Volkswagen Dirk Langer, Ph.D. VW Autonomous Driving Story 2000 2003 2006 Robot Klaus Purpose: Replace test drivers on poor test tracks (job safety) Robot
Autonomous Driving and Intelligent Vehicles at Volkswagen Dirk Langer, Ph.D. VW Autonomous Driving Story 2000 2003 2006 Robot Klaus Purpose: Replace test drivers on poor test tracks (job safety) Robot
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
Le développement technique des véhicules autonomes
 Shaping the future Le développement technique des véhicules autonomes Renaud Dubé, Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Fribourg, 23 Juin 2016 Renaud Dubé 23.06.2016 1 Content
Shaping the future Le développement technique des véhicules autonomes Renaud Dubé, Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Fribourg, 23 Juin 2016 Renaud Dubé 23.06.2016 1 Content
Deep Learning Will Make Truly Self-Driving Cars a Reality
 Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
AdaptIVe: Automated driving applications and technologies for intelligent vehicles
 Jens Langenberg Aachen 06 October 2015 AdaptIVe: Automated driving applications and technologies for intelligent vehicles Facts Budget: European Commission: EUR 25 Million EUR 14,3 Million Duration: 42
Jens Langenberg Aachen 06 October 2015 AdaptIVe: Automated driving applications and technologies for intelligent vehicles Facts Budget: European Commission: EUR 25 Million EUR 14,3 Million Duration: 42
Smart Control for Electric/Autonomous Vehicles
 Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017
 IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017 AUTOMATED DRIVING OPENS NEW OPPORTUNITIES FOR CUSTOMERS AND COMMUNITY. MORE SAFETY MORE COMFORT MORE FLEXIBILITY MORE
IN SPRINTS TOWARDS AUTONOMOUS DRIVING. BMW GROUP TECHNOLOGY WORKSHOPS. December 2017 AUTOMATED DRIVING OPENS NEW OPPORTUNITIES FOR CUSTOMERS AND COMMUNITY. MORE SAFETY MORE COMFORT MORE FLEXIBILITY MORE
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help?
 Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
Jimi van der Woning. 30 November 2010
 Jimi van der Woning 30 November 2010 The importance of robotic cars DARPA Hardware Software Path planning Google Car Where are we now? Future 30-11-2010 Jimi van der Woning 2/17 Currently over 800 million
Jimi van der Woning 30 November 2010 The importance of robotic cars DARPA Hardware Software Path planning Google Car Where are we now? Future 30-11-2010 Jimi van der Woning 2/17 Currently over 800 million
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF
 AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
A Communication-centric Look at Automated Driving
 A Communication-centric Look at Automated Driving Onur Altintas Toyota ITC Fellow Toyota InfoTechnology Center, USA, Inc. November 5, 2016 IEEE 5G Summit Seattle Views expressed in this talk do not necessarily
A Communication-centric Look at Automated Driving Onur Altintas Toyota ITC Fellow Toyota InfoTechnology Center, USA, Inc. November 5, 2016 IEEE 5G Summit Seattle Views expressed in this talk do not necessarily
REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE. Alex Haag Munich,
 REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE Alex Haag Munich, 10.10.2017 10/9/17 Regulatory Approval of an AI-based Autonomous Vehicle 2 1 INTRO Autonomous Intelligent Driving, GmbH Launched
REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE Alex Haag Munich, 10.10.2017 10/9/17 Regulatory Approval of an AI-based Autonomous Vehicle 2 1 INTRO Autonomous Intelligent Driving, GmbH Launched
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
THE FUTURE OF AUTONOMOUS CARS
 Index Table of Contents Table of Contents... i List of Figures... ix Executive summary... 1 1 Introduction to autonomous cars... 3 1.1 Definitions and classifications... 3 1.2 Brief history of autonomous
Index Table of Contents Table of Contents... i List of Figures... ix Executive summary... 1 1 Introduction to autonomous cars... 3 1.1 Definitions and classifications... 3 1.2 Brief history of autonomous
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE. CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development
 AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
Autnonomous Vehicles: Societal and Technological Evolution (Invited Contribution)
") Autnonomous Vehicles: Societal and Technological Evolution (Invited Contribution) Christian Laugier To cite this version: Christian Laugier. Autnonomous Vehicles: Societal and Technological Evolution (Invited
Autnonomous Vehicles: Societal and Technological Evolution (Invited Contribution) Christian Laugier To cite this version: Christian Laugier. Autnonomous Vehicles: Societal and Technological Evolution (Invited
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Towards Realizing Autonomous Driving Based on Distributed Decision Making for Complex Urban Environments
 Towards Realizing Autonomous Driving Based on Distributed Decision Making for Complex Urban Environments M.Sc. Elif Eryilmaz on behalf of Prof. Dr. Dr. h.c. Sahin Albayrak Digital Mobility Our vision Intelligent
Towards Realizing Autonomous Driving Based on Distributed Decision Making for Complex Urban Environments M.Sc. Elif Eryilmaz on behalf of Prof. Dr. Dr. h.c. Sahin Albayrak Digital Mobility Our vision Intelligent
On the role of AI in autonomous driving: prospects and challenges
 On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
Investigation on Control Methods and Development of Intelligent Vehicle Controller for Automated Highway Systems
 Investigation on Control Methods and Development of Intelligent Vehicle Controller for Automated Highway Systems P.Suresh ME11D045 Guide Dr. P. V. Manivannan Precision Engineering and Instrumentation Laboratory
Investigation on Control Methods and Development of Intelligent Vehicle Controller for Automated Highway Systems P.Suresh ME11D045 Guide Dr. P. V. Manivannan Precision Engineering and Instrumentation Laboratory
Intuitive Driving: Are We There Yet? Amine Taleb, Ph.D. February 2014 I 1
 Intuitive Driving: Are We There Yet? Amine Taleb, Ph.D. February 2014 I 1 February 2014 Outline Motivation Towards Connected/Automated Driving Valeo s Technologies and Perspective Automated Driving Connected
Intuitive Driving: Are We There Yet? Amine Taleb, Ph.D. February 2014 I 1 February 2014 Outline Motivation Towards Connected/Automated Driving Valeo s Technologies and Perspective Automated Driving Connected
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY
 UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
Car Technologies Stanford and CMU
 Car Technologies Stanford and CMU Stanford Racing Stanford Racing s entry was dubbed Junior in honor of Leland Stanford Jr. Team led by Sebastian Thrun and Mike Montemerlo (from SAIL) VW Passat Primary
Car Technologies Stanford and CMU Stanford Racing Stanford Racing s entry was dubbed Junior in honor of Leland Stanford Jr. Team led by Sebastian Thrun and Mike Montemerlo (from SAIL) VW Passat Primary
Control of Mobile Robots
 Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
THE WAY TO HIGHLY AUTOMATED DRIVING.
 December 15th, 2014. THE WAY TO HIGHLY AUTOMATED DRIVING. DR. WERNER HUBER, HEAD OF DRIVER ASSISTANCE AND PERCEPTION AT BMW GROUP RESEARCH AND TECHNOLOGY. AUTOMATION IS AN ESSENTIAL FEATURE OF THE INTELLIGENT
December 15th, 2014. THE WAY TO HIGHLY AUTOMATED DRIVING. DR. WERNER HUBER, HEAD OF DRIVER ASSISTANCE AND PERCEPTION AT BMW GROUP RESEARCH AND TECHNOLOGY. AUTOMATION IS AN ESSENTIAL FEATURE OF THE INTELLIGENT
ADVANCES IN INTELLIGENT VEHICLES
 ADVANCES IN INTELLIGENT VEHICLES MIKE BROWN SWRI 1 OVERVIEW Intelligent Vehicle Research Platform MARTI Intelligent Vehicle Technologies Cooperative Vehicles / Infrastructure Recent Demonstrations Conclusions
ADVANCES IN INTELLIGENT VEHICLES MIKE BROWN SWRI 1 OVERVIEW Intelligent Vehicle Research Platform MARTI Intelligent Vehicle Technologies Cooperative Vehicles / Infrastructure Recent Demonstrations Conclusions
Highly Automated Driving: Fiction or Future?
 The future of driving. Final Event Highly Automated Driving: Fiction or Future? Prof. Dr. Jürgen Leohold Volkswagen Group Research Motivation The driver as the unpredictable factor: Human error is the
The future of driving. Final Event Highly Automated Driving: Fiction or Future? Prof. Dr. Jürgen Leohold Volkswagen Group Research Motivation The driver as the unpredictable factor: Human error is the
Enabling Technologies for Autonomous Vehicles
 Enabling Technologies for Autonomous Vehicles Sanjiv Nanda, VP Technology Qualcomm Research August 2017 Qualcomm Research Teams in Seoul, Amsterdam, Bedminster NJ, Philadelphia and San Diego 2 Delivering
Enabling Technologies for Autonomous Vehicles Sanjiv Nanda, VP Technology Qualcomm Research August 2017 Qualcomm Research Teams in Seoul, Amsterdam, Bedminster NJ, Philadelphia and San Diego 2 Delivering
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
AUTOMATED TRUCK PLATOONS ON MOTORWAYS A CONTRIBUTION TO THE SAFETY ON ROADS
 AUTOMATED TRUCK PLATOONS ON MOTORWAYS A CONTRIBUTION TO THE SAFETY ON ROADS Dipl.-Wi.-Ing. Ralph Kunze Max Haberstroh M.A. Dipl.-Ing. Dipl.-Kfm Eckart Hauck Dr.-Ing. Richard Ramakers Prof. Dr.-Ing. em.
AUTOMATED TRUCK PLATOONS ON MOTORWAYS A CONTRIBUTION TO THE SAFETY ON ROADS Dipl.-Wi.-Ing. Ralph Kunze Max Haberstroh M.A. Dipl.-Ing. Dipl.-Kfm Eckart Hauck Dr.-Ing. Richard Ramakers Prof. Dr.-Ing. em.
MEMS Sensors for automotive safety. Marc OSAJDA, NXP Semiconductors
 MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
Research Challenges for Automated Vehicles
 Research Challenges for Automated Vehicles Steven E. Shladover, Sc.D. University of California, Berkeley October 10, 2005 1 Overview Reasons for automating vehicles How automation can improve efficiency
Research Challenges for Automated Vehicles Steven E. Shladover, Sc.D. University of California, Berkeley October 10, 2005 1 Overview Reasons for automating vehicles How automation can improve efficiency
BMW GROUP TECHNOLOGY WORKSHOPS AUTOMATED DRIVING-DIGITALIZATION MOBILITY SERVICES. December 2016
 BMW GROUP TECHNOLOGY WORKSHOPS AUTOMATED DRIVING-DIGITALIZATION MOBILITY SERVICES December 2016 DISCLAIMER. This document contains forward-looking statements that reflect BMW Group s current views about
BMW GROUP TECHNOLOGY WORKSHOPS AUTOMATED DRIVING-DIGITALIZATION MOBILITY SERVICES December 2016 DISCLAIMER. This document contains forward-looking statements that reflect BMW Group s current views about
STPA in Automotive Domain Advanced Tutorial
 www.uni-stuttgart.de The Second European STAMP Workshop 2014 STPA in Automotive Domain Advanced Tutorial Asim Abdulkhaleq, Ph.D Student Institute of Software Technology University of Stuttgart, Germany
www.uni-stuttgart.de The Second European STAMP Workshop 2014 STPA in Automotive Domain Advanced Tutorial Asim Abdulkhaleq, Ph.D Student Institute of Software Technology University of Stuttgart, Germany
Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System
 System") Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System 2017 Los Angeles Environmental Forum August 28th Ziran Wang ( 王子然 ), Guoyuan Wu, Peng Hao, Kanok Boriboonsomsin, and Matthew
Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System 2017 Los Angeles Environmental Forum August 28th Ziran Wang ( 王子然 ), Guoyuan Wu, Peng Hao, Kanok Boriboonsomsin, and Matthew
Automated Driving development in France: 2015 update. Prof. Arnaud de La Fortelle MINES ParisTech Centre for Robotics
 Automated Driving development in France: 2015 update Prof. Arnaud de La Fortelle MINES ParisTech Centre for Robotics Past and future projects What has changed A few key labs were involved Inria, IFSTTAR,
Automated Driving development in France: 2015 update Prof. Arnaud de La Fortelle MINES ParisTech Centre for Robotics Past and future projects What has changed A few key labs were involved Inria, IFSTTAR,
EPSRC-JLR Workshop 9th December 2014 TOWARDS AUTONOMY SMART AND CONNECTED CONTROL
 EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
The Imperative to Deploy. Automated Driving. CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper
 Stepper") The Imperative to Deploy 1 Automated Driving CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper 2 Paths to the Car of the Future costs roaming e-bike driving enjoyment hybrid electric
The Imperative to Deploy 1 Automated Driving CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper 2 Paths to the Car of the Future costs roaming e-bike driving enjoyment hybrid electric
THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA.
 GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
GPU Technology Conference, April 18th 2015. THE FAST LANE FROM SILICON VALLEY TO MUNICH. UWE HIGGEN, HEAD OF BMW GROUP TECHNOLOGY OFFICE USA. THE AUTOMOTIVE INDUSTRY WILL UNDERGO MASSIVE CHANGES DURING
CSE 352: Self-Driving Cars. Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark
 CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
The Digital Future of Driving Dr. László Palkovics State Secretary for Education
 The Digital Future of Driving Dr. László Palkovics State Secretary for Education 1. WHAT IS THE CHALLENGE? What is the challenge? Mobility Challenges Inspirating factors for development 1 Zero Emission
The Digital Future of Driving Dr. László Palkovics State Secretary for Education 1. WHAT IS THE CHALLENGE? What is the challenge? Mobility Challenges Inspirating factors for development 1 Zero Emission
Leveraging AI for Self-Driving Cars at GM. Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel
 Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
CSE 352: Self-Driving Cars. Team 2: Randall Huang Youri Paul Raman Sinha Joseph Cullen
 CSE 352: Self-Driving Cars Team 2: Randall Huang Youri Paul Raman Sinha Joseph Cullen What are Self-Driving Cars A self-driving car, also called autonomous car and driverless car, is a vehicle that is
CSE 352: Self-Driving Cars Team 2: Randall Huang Youri Paul Raman Sinha Joseph Cullen What are Self-Driving Cars A self-driving car, also called autonomous car and driverless car, is a vehicle that is
Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints
 Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints Lan Yue Ji, Sebatian Bartsch, Frank Kirchner DFKI Bremen & Universität Bremen Robotics Innovations Center Director:
Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints Lan Yue Ji, Sebatian Bartsch, Frank Kirchner DFKI Bremen & Universität Bremen Robotics Innovations Center Director:
The connected vehicle is the better vehicle!
 AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
Autonomous Driving by Audi. Dr. Miklós Kiss
 Autonomous Driving by Audi Dr. Miklós Kiss Milestones in future mobility Digitalisation Urbanisation Sustainability Piloted driving as an influence on megatrends 1 Enhanced safety 3 More comfort for the
Autonomous Driving by Audi Dr. Miklós Kiss Milestones in future mobility Digitalisation Urbanisation Sustainability Piloted driving as an influence on megatrends 1 Enhanced safety 3 More comfort for the
Near-Term Automation Issues: Use Cases and Standards Needs
 Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
WHITE PAPER Autonomous Driving A Bird s Eye View
 WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
The Ben Franklin Racing Team and the DARPA Urban Challenge
 The Ben Franklin Racing Team and the DARPA Urban Challenge Jon Bohren, Jason Derenick, Tully Foote, Jim Keller, Alex Kushleyev, Daniel Lee, Brian Satterfield, John Spletzer, Alex Stewart, Paul Vernaza
The Ben Franklin Racing Team and the DARPA Urban Challenge Jon Bohren, Jason Derenick, Tully Foote, Jim Keller, Alex Kushleyev, Daniel Lee, Brian Satterfield, John Spletzer, Alex Stewart, Paul Vernaza
Table of Contents. Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.
 Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.") March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
Technical and Legal Challenges for Urban Autonomous Driving
 Technical and Legal Challenges for Urban Autonomous Driving Seung-Woo Seo, Prof. Vehicle Intelligence Lab. Seoul National University sseo@snu.ac.kr I. Main Challenges for Urban Autonomous Driving I. Dilemma
Technical and Legal Challenges for Urban Autonomous Driving Seung-Woo Seo, Prof. Vehicle Intelligence Lab. Seoul National University sseo@snu.ac.kr I. Main Challenges for Urban Autonomous Driving I. Dilemma
Items to specify: 4. Motor Speed Control. Head Unit. Radar. Steering Wheel Angle. ego vehicle speed control
 Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
Audi piloted driving. Audi piloted driving. Daniel Lipinski, Electronic Research Lab, Volkswagen Group of America
 1 Daniel Lipinski, Electronic Research Lab, Volkswagen Group of America Audi goals for piloted driving The potential for driver assistance and integral safety functions lies with driver support other Technical
1 Daniel Lipinski, Electronic Research Lab, Volkswagen Group of America Audi goals for piloted driving The potential for driver assistance and integral safety functions lies with driver support other Technical
AUTONOMOUS VEHICLES AND TRANSIT S LAST MILE
 AUTONOMOUS VEHICLES AND TRANSIT S LAST MILE A STUDY OF THE METROPOLITAN ATLANTA REGIONAL TRANSIT AUTHORITY (MARTA) SYSTEM NATHANIEL HORADAM MASTER OF CITY AND REGIONAL PLANNING, CLASS OF 2018 THE DRIVERLESS
AUTONOMOUS VEHICLES AND TRANSIT S LAST MILE A STUDY OF THE METROPOLITAN ATLANTA REGIONAL TRANSIT AUTHORITY (MARTA) SYSTEM NATHANIEL HORADAM MASTER OF CITY AND REGIONAL PLANNING, CLASS OF 2018 THE DRIVERLESS
Discovery of Design Methodologies. Integration. Multi-disciplinary Design Problems
 Discovery of Design Methodologies for the Integration of Multi-disciplinary Design Problems Cirrus Shakeri Worcester Polytechnic Institute November 4, 1998 Worcester Polytechnic Institute Contents The
Discovery of Design Methodologies for the Integration of Multi-disciplinary Design Problems Cirrus Shakeri Worcester Polytechnic Institute November 4, 1998 Worcester Polytechnic Institute Contents The
Financial Planning Association of Michigan 2018 Fall Symposium Autonomous Vehicles Presentation
 Financial Planning Association of Michigan 2018 Fall Symposium Autonomous s Presentation 1 Katherine Ralston Program Manager, Autonomous s 2 FORD SECRET Why Autonomous s Societal Impact Great potential
Financial Planning Association of Michigan 2018 Fall Symposium Autonomous s Presentation 1 Katherine Ralston Program Manager, Autonomous s 2 FORD SECRET Why Autonomous s Societal Impact Great potential
Sabertooth A Hybrid AUV/ROV offshore system. Jan Siesjö Chief Engineer
 Sabertooth A Hybrid AUV/ROV offshore system Jan Siesjö Chief Engineer jan.siesjo@saabgroup.com SAAB WORLDWIDE Employees 2010 Sweden 10,372 South Africa 1,086 Australia 349 USA 194 Great Britain 117 Finland
Sabertooth A Hybrid AUV/ROV offshore system Jan Siesjö Chief Engineer jan.siesjo@saabgroup.com SAAB WORLDWIDE Employees 2010 Sweden 10,372 South Africa 1,086 Australia 349 USA 194 Great Britain 117 Finland
University of Michigan s Work Toward Autonomous Cars
 University of Michigan s Work Toward Autonomous Cars RYAN EUSTICE NAVAL ARCHITECTURE & MARINE ENGINEERING MECHANICAL ENGINEERING, AND COMPUTER SCIENCE AND ENGINEERING Roadmap Why automated driving? Next
University of Michigan s Work Toward Autonomous Cars RYAN EUSTICE NAVAL ARCHITECTURE & MARINE ENGINEERING MECHANICAL ENGINEERING, AND COMPUTER SCIENCE AND ENGINEERING Roadmap Why automated driving? Next
Autonomous Ground Vehicle Technologies Applied to the DARPA Grand Challenge
 Autonomous Ground Vehicle Technologies Applied to the DARPA Grand Challenge Carl D. Crane III*, David G. Armstrong Jr. * Mel W. Torrie **, and Sarah A. Gray ** * Center for Intelligent Machines and Robotics
Autonomous Ground Vehicle Technologies Applied to the DARPA Grand Challenge Carl D. Crane III*, David G. Armstrong Jr. * Mel W. Torrie **, and Sarah A. Gray ** * Center for Intelligent Machines and Robotics
Rover Systems Rover Systems 02/29/04
 Rover Systems Rover Systems 02/29/04 ted@roversystems.com Disclaimer: The views, opinions, and/or findings contained in this paper are those of the participating team and should not be interpreted as representing
Rover Systems Rover Systems 02/29/04 ted@roversystems.com Disclaimer: The views, opinions, and/or findings contained in this paper are those of the participating team and should not be interpreted as representing
Safety for Self-driving Cars
 Tech.AD. 5-6 March, 2018 Berlin Safety for Self-driving Safety for Cars Self-driving Cars -Challenges and Some Solutions -Challenges and Some Solutions Author: Håkan Sivencrona, PhD Functional Jonas Nilsson,
Tech.AD. 5-6 March, 2018 Berlin Safety for Self-driving Safety for Cars Self-driving Cars -Challenges and Some Solutions -Challenges and Some Solutions Author: Håkan Sivencrona, PhD Functional Jonas Nilsson,
Welcome to the 4th Annual UCF Urban and Regional Planning Distinguished Lecture Series
 UNIVERSITY OF CENTRAL FLORIDA ORLANDO SCHOOL OF PUBLIC ADMINISTRATION Welcome to the 4th Annual UCF Urban and Regional Planning Distinguished Lecture Series - April 24, 2016 UCF SCHOOL OF PUBLIC ADMINISTRATION
UNIVERSITY OF CENTRAL FLORIDA ORLANDO SCHOOL OF PUBLIC ADMINISTRATION Welcome to the 4th Annual UCF Urban and Regional Planning Distinguished Lecture Series - April 24, 2016 UCF SCHOOL OF PUBLIC ADMINISTRATION
CONNECTED AUTOMATION HOW ABOUT SAFETY?
 CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
ENGINEERING FOR HUMANS STPA ANALYSIS OF AN AUTOMATED PARKING SYSTEM
 ENGINEERING FOR HUMANS STPA ANALYSIS OF AN AUTOMATED PARKING SYSTEM Massachusetts Institute of Technology John Thomas Megan France General Motors Charles A. Green Mark A. Vernacchia Padma Sundaram Joseph
ENGINEERING FOR HUMANS STPA ANALYSIS OF AN AUTOMATED PARKING SYSTEM Massachusetts Institute of Technology John Thomas Megan France General Motors Charles A. Green Mark A. Vernacchia Padma Sundaram Joseph
Autonomous Vehicles: A look into the past - a look into the future
 Autonomous Vehicles: A look into the past - a look into the future Chester Wilmot, LTRC/LSU Presentation to the New Orleans Regional Planning Commission Freight Round Table 10/25/2017 THE PAST 1939 World
Autonomous Vehicles: A look into the past - a look into the future Chester Wilmot, LTRC/LSU Presentation to the New Orleans Regional Planning Commission Freight Round Table 10/25/2017 THE PAST 1939 World
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY
 ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY Bill Gouse Director, Federal Program Development Global Ground Vehicle Standards
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY Bill Gouse Director, Federal Program Development Global Ground Vehicle Standards
TOWARDS ACCIDENT FREE DRIVING
 ETSI SUMMIT: 5G FROM MYTH TO REALITY TOWARDS ACCIDENT FREE DRIVING Niels Peter Skov Andersen, General Manager Car 2 Car Communication Consortium All rights reserved How do we stop the cars colliding First
ETSI SUMMIT: 5G FROM MYTH TO REALITY TOWARDS ACCIDENT FREE DRIVING Niels Peter Skov Andersen, General Manager Car 2 Car Communication Consortium All rights reserved How do we stop the cars colliding First
Functional Algorithm for Automated Pedestrian Collision Avoidance System
 Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
The Self-Driving Network : How to Realize It Kireeti Kompella, CTO, Engineering
 The Self-Driving Network : How to Realize It Kireeti Kompella, CTO, Engineering The Self-Driving Network In March 2016, I presented the vision of a Self-Driving Network an automated, fully autonomous network
The Self-Driving Network : How to Realize It Kireeti Kompella, CTO, Engineering The Self-Driving Network In March 2016, I presented the vision of a Self-Driving Network an automated, fully autonomous network
Cooperative brake technology
 Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
RB-Mel-03. SCITOS G5 Mobile Platform Complete Package
 RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
2017 MDTSEA Manual - How it Corresponds to the ADTSEA 3.0 Curriculum for Segment 1 and 2 Classroom Education
 2017 MDTSEA - How it Corresponds to the ADTSEA 3.0 Curriculum for Segment 1 and 2 Classroom Education Section 5A Segment 1 Classroom Content, Objectives, and Resources 1 Introduction to Novice Driver Responsibilities
2017 MDTSEA - How it Corresponds to the ADTSEA 3.0 Curriculum for Segment 1 and 2 Classroom Education Section 5A Segment 1 Classroom Content, Objectives, and Resources 1 Introduction to Novice Driver Responsibilities
Syllabus: Automated, Connected, and Intelligent Vehicles
 Page 1 of 8 Syllabus: Automated, Connected, and Intelligent Vehicles Part 1: Course Information Description: Automated, Connected, and Intelligent Vehicles is an advanced automotive technology course that
Page 1 of 8 Syllabus: Automated, Connected, and Intelligent Vehicles Part 1: Course Information Description: Automated, Connected, and Intelligent Vehicles is an advanced automotive technology course that
DEVELOPMENT OF INFRASTRUCTURE-BASED AUTONOMOUS DRIVING SUPPORT SYSTEM USING DYNAMIC MAPS
 24th Annual ITS World Congress 2017 TS72 : Traffic Management Case Studies 01 November 2017 DEVELOPMENT OF INFRASTRUCTURE-BASED AUTONOMOUS DRIVING SUPPORT SYSTEM USING DYNAMIC MAPS Yoshiaki Tsuda +), Keisuke
24th Annual ITS World Congress 2017 TS72 : Traffic Management Case Studies 01 November 2017 DEVELOPMENT OF INFRASTRUCTURE-BASED AUTONOMOUS DRIVING SUPPORT SYSTEM USING DYNAMIC MAPS Yoshiaki Tsuda +), Keisuke
Prototyping Collision Avoidance for suas
 Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
The intelligent Truck safe, autonomous, connected. N. Mustafa Üstertuna Mercedes-Benz Türk A.Ş.
 The intelligent Truck safe, autonomous, connected N. Mustafa Üstertuna Mercedes-Benz Türk A.Ş. Challenges in the transportation industry Accidents Short Delivery Times On-Highway Traffic Urban Pollution
The intelligent Truck safe, autonomous, connected N. Mustafa Üstertuna Mercedes-Benz Türk A.Ş. Challenges in the transportation industry Accidents Short Delivery Times On-Highway Traffic Urban Pollution
Automated Vehicles: Terminology and Taxonomy
 Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
Development of the SciAutonics / Auburn Engineering Autonomous Car for the Urban Challenge. Prepared for: DARPA Urban Challenge
 Development of the SciAutonics / Auburn Engineering Autonomous Car for the Urban Challenge Prepared for: DARPA Urban Challenge Prepared by: SciAutonics, LLC and Auburn University College of Engineering
Development of the SciAutonics / Auburn Engineering Autonomous Car for the Urban Challenge Prepared for: DARPA Urban Challenge Prepared by: SciAutonics, LLC and Auburn University College of Engineering
AUTOMATED DRIVING IN EUROPE
 AUTOMATED DRIVING IN EUROPE SIP-ADUS WORKSHOP TOKYO 14.11.2017 DR. HELGE NEUNER HISTORY OF AUTOMATED DRIVING @ VOLKSWAGEN GROUP RESEARCH Stanley Junior PAUL (2005) (2007) (2007) icar HAVEit et Follow me!
AUTOMATED DRIVING IN EUROPE SIP-ADUS WORKSHOP TOKYO 14.11.2017 DR. HELGE NEUNER HISTORY OF AUTOMATED DRIVING @ VOLKSWAGEN GROUP RESEARCH Stanley Junior PAUL (2005) (2007) (2007) icar HAVEit et Follow me!
On the road to automated vehicles Sensors pave the way!
 On the road to automated vehicles Sensors pave the way! 26B connected devices 250M connected vehicles by 2020 Ottomatika http://www.cmu.edu/news/stories/archives/2015/august/spinoff-acquired.html
On the road to automated vehicles Sensors pave the way! 26B connected devices 250M connected vehicles by 2020 Ottomatika http://www.cmu.edu/news/stories/archives/2015/august/spinoff-acquired.html
The VisLab Intercontinental Autonomous Challenge: 13,000 km, 3 months, no driver
 The VisLab Intercontinental Autonomous Challenge: 13,000 km, 3 months, no driver M.Bertozzi, L.Bombini, A.Broggi, M.Buzzoni, E.Cardarelli, S.Cattani, P.Cerri, S.Debattisti,. R.I.Fedriga, M.Felisa, L.Gatti,
The VisLab Intercontinental Autonomous Challenge: 13,000 km, 3 months, no driver M.Bertozzi, L.Bombini, A.Broggi, M.Buzzoni, E.Cardarelli, S.Cattani, P.Cerri, S.Debattisti,. R.I.Fedriga, M.Felisa, L.Gatti,
TECHNOLOGY WORKSHOPS December 2017
 TECHNOLOGY WORKSHOPS 2017. December 2017 STRATEGY NUMBER ONE > NEXT CONTINUES THE SUCCESSFUL BUSINESS DEVELOPMENT AND CHARTS THE COURSE FOR AN INNOVATIVE FUTURE. 2007 2016 + Strategy Number ONE NUMBER
TECHNOLOGY WORKSHOPS 2017. December 2017 STRATEGY NUMBER ONE > NEXT CONTINUES THE SUCCESSFUL BUSINESS DEVELOPMENT AND CHARTS THE COURSE FOR AN INNOVATIVE FUTURE. 2007 2016 + Strategy Number ONE NUMBER
Global Perspectives of ITS
 ITU-T WORKSHOP ICTs: Building the Green City of the Future United Nations Pavilion, EXPO-2010-14 May 2010, Shanghai, China Building Sustainable Green Smart City of the Future enabled by ICT: Global Perspectives
ITU-T WORKSHOP ICTs: Building the Green City of the Future United Nations Pavilion, EXPO-2010-14 May 2010, Shanghai, China Building Sustainable Green Smart City of the Future enabled by ICT: Global Perspectives
The fact that SkyToll is able to deliver quality results has been proven by its successful projects.
 www.skytoll.com At present, an efficient and well-functioning transport sector and the quality of transport infrastructure itself are a prerequisite for the further growth of the economy and ensure the
www.skytoll.com At present, an efficient and well-functioning transport sector and the quality of transport infrastructure itself are a prerequisite for the further growth of the economy and ensure the
B60W. Definition statement. Relationships with other classification places CPC - B60W
 B60W CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO
B60W CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO
White paper: Pneumatics or electrics important criteria when choosing technology
 White paper: Pneumatics or electrics important criteria when choosing technology The requirements for modern production plants are becoming increasingly complex. It is therefore essential that the drive
White paper: Pneumatics or electrics important criteria when choosing technology The requirements for modern production plants are becoming increasingly complex. It is therefore essential that the drive
Intelligent Drive next LEVEL
 Daimler AG Dr. Eberhard Zeeb Senior Manager Function and Software Driver Assistance Systems Intelligent Drive next LEVEL on the way towards autonomous driving Pioneers of the Automobile Bertha Benz 1888
Daimler AG Dr. Eberhard Zeeb Senior Manager Function and Software Driver Assistance Systems Intelligent Drive next LEVEL on the way towards autonomous driving Pioneers of the Automobile Bertha Benz 1888
Road Safety and the Italian Tolled Motorway Network: where we are and what we are doing?
 Italian Association of Toll Motorways and Tunnels Operators Road Safety and the Italian Tolled Motorway Network: where we are and what we are doing? WORKSHOP ON MANAGING OPERATIONAL RISK IN ROAD OPERATIONS
Italian Association of Toll Motorways and Tunnels Operators Road Safety and the Italian Tolled Motorway Network: where we are and what we are doing? WORKSHOP ON MANAGING OPERATIONAL RISK IN ROAD OPERATIONS
Security for the Autonomous Vehicle Identifying the Challenges
 Security for the Autonomous Vehicle Identifying the Challenges Mike Parris Head of Secure Car Division November 2016 Today s agenda A Definition Developing a Threat Model Key Findings Conclusions 2 A Definition
Security for the Autonomous Vehicle Identifying the Challenges Mike Parris Head of Secure Car Division November 2016 Today s agenda A Definition Developing a Threat Model Key Findings Conclusions 2 A Definition
G4 Apps. Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013
 Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013 Reducing costs, emissions. Improving mobility, efficiency. Safe Broadband Wireless Operations Fusion: Vehicles-Agencies Technologies,
Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013 Reducing costs, emissions. Improving mobility, efficiency. Safe Broadband Wireless Operations Fusion: Vehicles-Agencies Technologies,
5G ve Araçlararası Haberleşmenin Geleceği
 TURKCELL 5G ve Araçlararası Haberleşmenin Geleceği Dr. Mustafa Aykut mustafa.aykut@turkcell.com.tr 01 Nov. 2018 İstanbul Gartner s Hype Cycle 18 VaMoRS Versuchfahrzeug für autonome Mobilität und RechnerSehen
TURKCELL 5G ve Araçlararası Haberleşmenin Geleceği Dr. Mustafa Aykut mustafa.aykut@turkcell.com.tr 01 Nov. 2018 İstanbul Gartner s Hype Cycle 18 VaMoRS Versuchfahrzeug für autonome Mobilität und RechnerSehen
Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination
: An Autonomous Vessel for Data Acquisition and Dissemination") Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination AUV Lab @ MIT Sea Grant Alon Yaari, Michael Sacarny, Michael DeFilippo, Husayn Karimi, Paris Perdikaris MOOS-DAWG 2015
Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination AUV Lab @ MIT Sea Grant Alon Yaari, Michael Sacarny, Michael DeFilippo, Husayn Karimi, Paris Perdikaris MOOS-DAWG 2015
ITS TEXAS Connected Vehicles: ITS Implications Short and Long Term
 ITS TEXAS 2015 Connected Vehicles: ITS Implications Short and Long Term Thomas J. Bamonte Assistant Executive Director, Strategy & Innovation North Texas Tollway Authority Twitter: @TomBamonte November
ITS TEXAS 2015 Connected Vehicles: ITS Implications Short and Long Term Thomas J. Bamonte Assistant Executive Director, Strategy & Innovation North Texas Tollway Authority Twitter: @TomBamonte November
Unmanned Surface Vessels - Opportunities and Technology
 Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
CHEMICALS AND REFINING. ABB in chemicals and refining A proven approach for transforming your challenges into opportunities
 CHEMICALS AND REFINING ABB in chemicals and refining A proven approach for transforming your challenges into opportunities 2 ABB in Chemicals and Refining A proven approach for transforming your challenges
CHEMICALS AND REFINING ABB in chemicals and refining A proven approach for transforming your challenges into opportunities 2 ABB in Chemicals and Refining A proven approach for transforming your challenges