NASA USLI Flight Readiness Review (FRR) Rensselaer Rocket Society (RRS)
|
|
|
- Diana Payne
- 5 years ago
- Views:
Transcription

1 NASA USLI Flight Readiness Review (FRR) Rensselaer Rocket Society (RRS) Rensselaer Polytechnic Institute 110 8th St Troy, NY Project Name: Andromeda Task 3.3: Roll Induction and Counter Roll Monday, March 6 th,
2 1. Table of Contents 1. Table of Contents Table of Figures Table of Tables 6 2. Executive Summary Team Summary Launch Vehicle Summary Payload Summary 7 3. Changes Made Since CDR Vehicle Changes Payload Changes Project Plan Changes 8 4. Vehicle Criteria Design and Construction of Vehicle Necessary Vehicle Design Changes Vehicle Design Features Flight Reliability and Confidence Construction Process Pre-construction Fin Canister Assembly Lower Airframe Assembly Upper Airframe Assembly Vehicle Integration Drilling Recovery Subsystem Structural Elements Harnesses and Attachment Hardware Bulkheads Ejection Electrical Elements and Schematics Redundancy Features Selected Parachute GPS Receiver and Transmitter Sensitivity of Electrical Elements to Transmitters Mission Performance Predictions Mission Performance Criteria Simulated Mission Performance 29 2
3 4.3.3 Comparison to Actual Flight Data Stability Margin Kinetic Energy Analysis Drift Calculations Full Scale Test Flight Launch Day Conditions Simulated Performance Flight Data Comparison of Simulation and Actual Data Calculated Center of Pressure Payload Criteria As-Built Design Structural Elements Blades Cam System Design Payload Can Assembly of Payload Instrumentation Specifications Payload Electronics Power Regulation On/Off Switching Control Board Lessons Learned from Full-Scale Test Flight Safety Safety Officer Personal Hazard Analysis Personnel Risks Vehicle Risks Payload Risks Environmental Risks RF Safety Analysis MSDS Launch Operations Procedures Project Plan Testing Requirement Verification Team Derived Requirement Verification 74 3
4 8.3.1 Vehicle Subsystem Payload Subsystem Budget Timeline Educational Engagement Exploring Engineering Day Operation Nest Egg 75 Appendix A: Milestone Review Sheet 76 Appendix B: Vehicle Design Assembly Drawings 79 Appendix C: B2-Rocketry Parachute Packing Guide 84 Appendix D: Detailed Budget 85 4
5 1.1 Table of Figures Figure 4-1: Cessaroni L910 and Aerotech L1000 Thrust Curves 9 Figure 4-2: Reference for Airframe Description 10 Figure 4-3: Original Defective Fins with Mismatched Tab Heights 11 Figure 4-4: RRS Member Using an X-Acto Knife to Cut Phenolic Resin 12 Figure 4-5: The Fin Alignment Guide 13 Figure 4-6: Attaching the First Fin to the Motor Mount Assembly 14 Figure 4-7: Assembled Fin Canister Prior to Reinforcement 14 Figure 4-8: Fiberglass Reinforcements on the Fin Canister Assembly 15 Figure 4-9: Recovery Attachment Point on Forward Centering Ring 16 Figure 4-10: Interior and Exterior Shots of the Lower Airframe 17 Figure 4-11: Assembled Lower Airframe 17 Figure 4-12: Interior and Exterior Views of Completed Nose Cone 18 FIgure 4-13: In Progress View of the Payload Integration Slots 19 Figure 4-14: Reinforced Payload Integration Slots 20 Figure 4-15: Layout of the electronics sleds 21 Figure 4-16: Avionics Bay Integration Screws 21 Figure 4-17: Payload Integration Screws Holding Payload Frame in Place 22 Figure 4-18: Bulkhead with replacement eye bolt CAD assembly 23 Figure 4-19: Top and bottom bulkheads for avionics bay 24 Figure 4-20: Von Mises Stresses on bulkhead 25 Figure 4-21: Notch for the electrical connectors in avionics bay bulkhead 26 Figure 4-23: Electrical schematics for altimeters 27 Figure 4-24: Design Profile 29 Figure 4-25: Launch Simulation using Design Profile 30 Figure 4-26: Corrected Profile 30 Figure 4-27: Plot of simulation 31 Figure 4-28: Simulated Stability Margin from Corrected Model 31 Figure 4-29: Altitude vs Time 33 Figure 4-30: Velocity vs Time 34 Figure 4-31: Axial Acceleration vs Time 34 Figure 4-32: Flight data from Raven3 35 Figure 5-1: CAD Blade 37 Figure 5-2: Machined Blade 37 Figure 5-3: Exploded View Half Mechanical Payload 37 Figure 5-4: Cam, Linear, and Motor Plates 38 Figure 5-5: Payload Can Full Assembly Render 39 Figure 5-6: Regulator Schematic 42 Figure Hall Effect Switch Schematic 43 Figure Hall Effect Switch Layout 43 Figure Control Board Schematic 44 Figure 5-10: Control Board 45 5
6 1.2 Table of Tables Table 4-2: Calculated Draft Distances for varied Wind Speeds 32 Table 5-1: Payload Timeline 36 Table 5-2: Accelerometer Sensitivity 41 Table 5-3: Magnetometer Sensitivity 41 Table 5-4: Gyroscope Sensitivity 41 Table 6-1: Material Risks to health and Risk mitigation 46 Table 6-2: Color Coded Risk Assessment Codes 48 Table 6-3: Different Levels of Risk and Their Acceptance Levels 48 Table 6-4: Personnel Hazard Risk Assessment 49 Table 6-5: Launch Vehicle Safety Risk Analysis 51 Table 6-6: Payload Safety Risk Analysis 53 Table 6-7: Environmental Safety Risk Analysis 54 Table 6-8: Environmental Impact on Rocket Risk Analysis 55 Table 7-1: Item Checklist for Pre-Launch Operations 57 Table 7-2: Launch Operations Procedures 59 Table 8-1: Testing Plan Table 8-2: Requirement Verification 68 Table 8-3: RRS Budget Summary 75 6
7 2. Executive Summary 2.1 Team Summary The Rensselaer Rocket Society (RRS) is a student organization located at Rensselaer Polytechnic Institute (RPI). The RRS operates in the Ricketts Building at RPI. The RRS s faculty advisor is Dr. Jason Hicken, Assistant Professor in the department of Mechanical, Aerospace, and Nuclear Engineering. The Community Mentor for the RRS is Jody Johnson (NAR Level 3 Certified, NAR #85182 SR, TRA Level 3 Certified, TRA #10973). The mailing address for the RRS is: Rensselaer Rocket Society Department of Mechanical, Aerospace, and Nuclear Engineering Rensselaer Polytechnic Institute 110 8th St Troy, NY Launch Vehicle Summary The launch vehicle is approximately 109 in long, with a body diameter of approximately 6 in, and has three vehicle fins of custom dimensions. The launch vehicle will be propelled by a 54 mm Aerotech L1000 motor. The recovery system consists of an electronic dual-deployment system that will deploy a drogue parachute at apogee and a main parachute at a much lower altitude during descent. The recovery system will be controlled by a set of two completely independent, redundant altimeters. The primary altimeter will be a PerfectFlite Stratologger SL100. The secondary altimeter will be a Featherweight Raven3. Each altimeter is powered independently, and is connected only to ejection charges for parachute deployment. 2.3 Payload Summary The payload design attempts to complete the requirements of the challenges outlined in section 3.3 of the 2017 NASA Student Launch Colleges, Universities, Non-Academic Handbook. To achieve this, the payload includes two cam systems that deploy two sets of opposing blades to induce roll and counter-roll. The Payload Module utilizes redundant gyroscopes to monitor roll and dynamically deploy blades to match an idealized rotational model. The two sets of three blades are asymmetric airfoils (NASA NLF15) with fixed angles of attack of 5 and -5, respectively. Two independent motors drive the cam, and are controlled by a central microprocessor, which deploys each set as they are needed. Following the roll-counter-roll phase, the microprocessor will command the motors to equally extend both sets of blades, to act as active drag control, slowing the rocket to reach the target altitude. 7
8 3. Changes Made Since CDR 3.1 Vehicle Changes Due to unavailability of the Cessaroni L910, the RRS was granted permission to switch motors. The new motor selected was the Aerotech L1000. This motor is a 54 mm, 27 in long motor which prompted the usage of an appropriate AeroPack motor adapter set. Additionally, the lower airframe section has been extended to provide sufficient drogue parachute packing space and increase stability. Since the L1000 is much lighter than the L910, the nose cone ballast was removed from the design. To address concerns regarding the structural strength of the airframe around the payload integration slots, that section of airframe was reinforced with fiberglass. Details of this reinforcement are given in the construction details of section The eyebolts were upgraded to a larger size. The original design choice was ¼ eye bolts that had a strength of 500 lbf, making them the weakest link in the design. The eye bolts were upgraded to ⅜ giving them a strength of 1300 lbf. With this change, the eye bolts have a strength similar to the other attachment hardware components. 3.2 Payload Changes Since the CDR, the payload system has become further refined aluminum was chosen for the plates for its strength over density and abundance in the aerospace community. Also, fastener sizing was considered for each mating surface, and are laid out in the assembly section (5.1.2). Finally, mechanical-electrical integration was further considered as mass was removed from the cam assembly to decrease launch mass and provide ample space for cabling through the payload can. 3.3 Project Plan Changes The project plan has been updated to reflect the current project statues. At the current phase, the rocket is fully assembled and the test flight completed. However, the test flight was delayed due to part ordering delays and bad weather. Furthermore, not all systems are fully functioning and require more work before the competition. 8

9 4. Vehicle Criteria 4.1 Design and Construction of Vehicle Necessary Vehicle Design Changes During the CDR presentation, it was brought to the RRS's attention that the motor that had been previously selected, the Cesaroni L910, is out of stock due to a fire at the Cesaroni plant. This resulted in a necessary change in motor selection and by extension a change in overall rocket design. The design choice of the new motor mostly hinged on the availability of the motor, and a similar performance profile to the Cessaroni L910. The team considered several options, and eventually selected the 54 mm Aerotech L1000 motor. Figure 4-1 shows the thrust curve for the L1000 compared to the Cessaroni L910. The L1000 is a 6% L class motor with a total impulse of 2702 Ns, average thrust of 991 N, and a max thrust of 1322 N. It burns for 2.72s, has a launch mass of 77.4 oz. A commercially available 75 mm to 54 mm motor adapter set from AeroPack Inc. will be used to proper mount and retain the new motor. This particular motor is single use and significantly lighter than the Cesaroni. The reduction in weight allowed the RRS to remove the nosecone ballast from the design. Figure 4-1: Cessaroni L910 (left) and Aerotech L1000 (right) Thrust Curves As the rocket was already under construction when the RRS discovered the shortage of Cesaroni motors, the design changes that could be made to the rocket were limited. To increase stability and provide sufficient drogue packing space, the lower body tube length was increased from 30 in to 37 in in length. The motor mount only extends 20 in, which does not cover the full 27 in length of the L1000 motor. Additionally, concerns were raised by the CDR review panel about the strength of the airframe around the payload integration slots. After discussing and testing the best way to reinforce the section, the team decided to cut the slots into the phenolic, apply a layer of fiberglass suspended in West Systems epoxy, then re-cut the slots in the fiberglass. Details and figures of this process are given in section
10 4.1.2 Vehicle Design Features The nosecone of the rocket is a vacuum formed plastic nose cone with interior fiberglass reinforcement. The selected tangent ogive profile of the nose cone performed best in simulations of the ones available through the RRS s supplier. The bulkheads separating the different bays of the rocket are made of ½ in thick birch plywood. The body tubes of the rocket are made of a spiral bound phenolic resin. This material was chosen for its relative strength and price point. The 6 in diameter of the body supplies ample space that allows for the design freedom of the avionics bay and the payload. The body is comprised of three sections of respective lengths 22, 26, and 37 from top to bottom. These sections are connected by 2 individual 12 couplers. Figure 4-2: Reference for Airframe Description The motor mount assembly is comprised of three fins, their supporting fillets, two centering rings, motor adapters, and the mounting tube itself. The three fins are made of G10 fiberglass and have a swept trapezoidal profile. The fins are directly attached to the motor mount by fiberglass reinforced fillets and extend through the body. Scotch weld fillets around the perimeter of the slots in the body tube further stabilize the fins. The centering rings are ½ thick birch plywood. These rings are fit against each end of the tang of the fins and are also adhered with Scotch Weld and fiberglass reinforced fillets Flight Reliability and Confidence All sections of the rocket are secured with a more than adequate amount of fasteners. The only region in question is that of the payload. The slots in the body of the rocket were calculated to increase the maximum stress experienced by that section by approximately 200%. In order to counter this effect, the RRS decided to coat the surrounding with West Systems Epoxy and fiberglass. The support added by the fiberglass was sufficient to not allow any visible damage or wear to the blade holes Construction Process The RRS employs a construction process that reflects the experience acquired by club members from previous large scale vehicle builds. The following steps outline the process in roughly chronological order, though team members parallelized steps whenever possible. 10

11 Pre-construction Before construction began, all parts involved were inspected for any signs of manufacturer defects or damage from shipping. By doing so, the RRS caught a major mistake made by PML in cutting the G10 vehicle fins. The original set of fins had the correct forward tab height of 1.515, but an incorrect rear tab height of 1, as illustrated in Figure 4-3. Figure 4-3: Original Defective Fins with Mismatched Tab Heights Noticing this mistake early in the process minimized the time lost when exchanging the fins. Team members deemed all other materials necessary for the vehicle construction process to be of sufficiently free of any signs of damage or defect. PML sells 6 diameter phenolic resin tubes by lengths of 48. As another pre-process step, members of the RRS cut the provided tubes down to the appropriate lengths as outlined in section Since phenolic resin is a brittle material, the RRS uses a special technique to avoid damaging the material when cutting it. Desired cuts are first marked out then lightly traced using a sharp X-acto knife to create a groove at the desired location. After a solid groove is in place, a box cutter is used with a repeated scoring motion to slowly and evenly carve into the groove. Eventually, the material will split cleanly, and the edges of the tubes can then be sanded to create a smooth and even tube edge. Though this technique is slightly time consuming, the RRS highly values the reduction in risk of losing material. Figure 4-4 below shows a member assisting with this beginning of this cutting process. Using a similar process, the slots in the lower airframe for the vehicle fins were extended out to the bottom of the airframe. 11

12 Figure 4-4: RRS Member Using an X-Acto Knife to Cut Phenolic Resin Another necessary pre-construction step is the creation of the fin alignment guide. The guide ensured the fins were attached to the motor mount as perpendicularly as possible, which reduces vehicle drag and the chances of undesired natural rotation. Two different frames were placed on a table and secured in place to provide the alignment effect, as shown below in Figure 4-5. Each frame consists of 2 x 4 planks that are slotted to hold a piece of plywood sheet. The plywood was laser cut to match the dimensions of the airframe with slots for each fin. This design has the advantage of reusability, as different plywood sheets can be cut for different builds and then placed into the same plank frame. 12

13 Figure 4-5: The Fin Alignment Guide Fin Canister Assembly In order to increase vehicle strength and robustness, the RRS prefers to heavily reinforce the attachment point between the motor mount and the fins. Adding these reinforcements is very cumbersome using a traditional build process, where the motor mount fixed into airframe, and then the fins attached to the motor mount via slots. To facilitate these reinforcements, the RRS creates a fin canister by attaching the fins to the motor mount assembly, then reinforces the piece as desired, then inserts the complete assembly into the airframe by extending the fin slots to the bottom of the airframe. The placement of the two ½ birch plywood centering rings were marked and sanded on the 20 long piece of 3 diameter phenolic resin that serves as the motor mount. The interior edge of the centering rings is also sanded to create a sufficient bonding surface for the epoxy. The lower centering ring was then attached using high temperature Scotch Weld epoxy, with the correct placement maintained by 0.75 spacers underneath the ring. Once the lower ring set, the upper centering ring was epoxyed in place using tape around the motor mount to maintain the correct position. The tape was removed after the epoxy was slightly set. With both centering rings, extreme care was taken to ensure that the rings were mounted exactly level. Figure 4-6 below shows both centering rings in place. 13


14 Figure 4-6: Attaching the First Fin to the Motor Mount Assembly Once both centering rings were in place, the fins could be attached. The edge of the fin tabs and surface of the motor mount were sanded to create bonding surfaces. The fins were then test fitted without epoxy in the fin alignment guide to ensure proper clearance on all alignment slots, and to mark the centering rings for the approximate placement of the fins. Then Scotch Weld epoxy was applied to one fin s tab edge. The fin was then placed on the motor mount and checked for alignment. Once alignment was visually verified, small tacks of super glue were placed at the top and bottom of the fin tab and immediately hardened with accelerant in order to keep the fin stable while being manipulated. Any excess epoxy was then cleaned up to make sure that nothing would prematurely bond to the interior of the airframe. The partial fin canister assembly was then inserted into the lower airframe, which was then inserted into the fin alignment guide. The fin was left in place for at least the full set time of 10 hours, then the process repeated on the other two fins. Figure 4-7 below shows the initially assembled fin canister. Figure 4-7: Assembled Fin Canister Prior to Reinforcement 14

15 With the fin canister supported on as shown above in Figure 4-7, additional Scotch Weld epoxy fillets were placed along the edges between each fin and the motor mount. After those three sets of fillets were placed, the entire surface along each fin tab and the connecting section of motor mount were reinforced by coarse weave fiberglass cloth set in West Systems epoxy. Stiff paint brushes were used to press down the fiberglass cloth, which removed any air bubbles trapped in the composite. Again, a full set was allowed in between each application of fiberglass. Figure 4-8 below shows one of side of the motor mount with this fiberglass reinforcement in place. Figure 4-8: Fiberglass Reinforcements on the Fin Canister Assembly With the fiberglass reinforcements in place, the fin canister was prepared for final insertion into the lower airframe. 3D printed blocks were attached with epoxy above each of the centering rings to act as backings for the rail button screws. These were printed in PLA plastic at 100% infill. The forward centering ring was then drilled with a ⅜ in bit for the attachment of the recovery eye bolt. The bolt was secured with washers above and below the centering ring, a nut below the ring, and sealed into place with J.B. Weld epoxy. Figure 4-9 below shows the eye bolt attached. 15

16 Figure 4-9: Recovery Attachment Point on Forward Centering Ring Lower Airframe Assembly With the fin canister assembled and reinforced, it could be permanently inserted into the lower airframe. The interior of the airframe where the centering rings would rest was sanded to create a bonding surface. Tape was applied to the section of motor mount forward of the top centering ring to prevent any excess epoxy from getting on that area. Then a generous amount of Scotch Weld epoxy was applied to the interior of the airframe where the forward centering ring would be. The fin canister was then partially inserted into the airframe, and a dowel was used to apply more epoxy where the rear centering ring would be. The fin canister was then fully inserted into the airframe, and a circle clamp was placed to apply even pressure while the epoxy fully cured. Figure 4-10 below shows exterior and interior pictures of the lower airframe just after this insertion process. 16



17 Figure 4-10: Interior and Exterior Shots of the Lower Airframe Once the fin canister was fully set in the airframe, exterior fillets were applied to the edges along each fin and the airframe. A line for the rail buttons was then marked, and holes drilled with a ¼ bit along this line. The holes were tapped for the rail button screws, then the screws permanently secured with superglue on the threads. A sealing fillet was applied to the bottom of the rear centering ring using Scotch Weld epoxy, and the motor retainer was attached using J.B. Weld epoxy. Finally, the spiral seams on the phenolic resin airframe were filed using wood filler. Pictures of the final lower airframe assembly are shown in Figure 4-11 below. Figure 4-11: Assembled Lower Airframe 17


18 Upper Airframe Assembly The construction of the upper airframe fell into three major categories: nose cone preparation, payload slot creation, and avionics bay creation. The nose cone features an open bottom design, with a special bulkhead for recovery hardware attachments. To ensure the bulkhead was mounted level within the nose cone, small standoffs were tacked onto the interior of the nose cone at the end of the shoulder using quick set epoxy. Then Scotch Weld epoxy was used to secure the bulkhead in place, using excess epoxy to form a fillet around the bottom edge of the bulkhead. The nose cone also had an exterior seam from the manufacturing process which was sanded down to be a smooth surface. Figure 4-12 below shows interior and exterior views of the nose cone. Figure 4-12: Interior and Exterior Views of Completed Nose Cone After marking the body tube with outlines of the slots, a ¼ in drill bit was used to drill out each corner of the slots ¼ in drill bit was used in order to ensure that the radius of each corner was ⅛ in. Using the same technique as described above, team members cut the remaining edges of each slot. The slots were then sanded and filed to create clean edges. Figure 4-13 below showcases interior and exterior views of four out of six payload slots cut into the airframe 18


19 FIgure 4-13: In Progress View of the Payload Integration Slots After running an FEA simulation on this section of the body tube, the RRS determined that these slots would need to be reinforced. After testing multiple techniques for reinforcing the slots, the club determined that wrapping a layer of fiberglass around the body tube containing the slots would be the most effective method of reinforcement. The area was sanded, and the same fiberglass used to reinforce the fins was wrapped around the body tube and applied with West Systems epoxy in a very similar fashion as the fin reinforcements. After the epoxy set, the fiberglass covering the slots was cut away and cleaned up using sandpaper and files. The surface of the fiberglass was sanded to smoothen it. Then Elmer s wood filler was used to fill any inconsistencies left at the seam of the fiberglass and to create a smoother transition between the fiberglass and bare phenolic resin surface. Figure 4-14 below illustrate the fiberglass reinforcement, before and after the slots were again cut out. 19
.")

20 Figure 4-14: Reinforced Payload Integration Slots The avionics bay was constructed from a coupler and two bulkheads. It houses all on board electronics for the recovery and payload team on two plywood sleds (Figure 4-15). Two 5/16 threaded rods secure the bulkheads to the coupler, which were cut to length using a bandsaw. The payload sled itself is constructed from two pieces of 8 x 5 in pieces of plywood. One piece of the sled is fixed with epoxy to 12 in long brass rods, while the other is secured with 2 ¼-20 screws. Details for the the position of electrical components and their respective screw holes can be found in section Before construction started, a detailed CAD model was created to ensure that all components could fit on the plywood sleds. The final CAD model is detailed in Figure 4-22 in section Next, holes were drilled into the bulkheads for eyebolts and the threaded rods. Slots for the electrical connectors were cut out using a vertical mill then all components were physically laid out on each plywood board. The holes for these components were carefully marked then drilled. All components were then secured with screws. 20



21 Figure 4-15: Layout of the electronics sleds As with the lower airframe, the spiral seams in the airframe components were filled using wood filler Vehicle Integration Drilling Along the length of the launch vehicle various screw holes needed to be drilled. The nose cone is held into place by six planar 2-56 shear pins. These holes were drilled using a #50 bit from a numbered drill bit set. The holes were then tapped with a 2-56 tap drill bit. The avionics bay is secured by ½ screws; six screws in the bottom of the upper body tube section and six screws in the top of the middle body tube section. In each of these sets of six screws, there are two subsets of three screws that are co-planar, with each set 1 in apart. This layout is illustrated in Figure 4-16 below. These holes were made using a #36 drill bit. They were carefully marked, then drilled using a hand drill with a vertical alignment guide. The holes were then tapped with a 6-32 tap drill bit. Figure 4-16: Avionics Bay Integration Screws 21

22 Both the Raven3 and Stratologger altimeters require static port holes to correctly read barometric pressure. By the team mentor s recommendation, the RRS consulted the resources available at Vern Knowles Rocketry website. Calculations showed that three ¼ diameter holes were necessary based on the volume of the avionics bay. These holes were drilled out using a hand drill with a vertical alignment guide. The static port holes are visible in Figure 4-16 above. The payload contains integration screw holes on the top and bottom of each structural strut; corresponding holes needed to be drilled into the airframe. First, the payload frame was completely assembled, and checked for levelness and squareness. The frame was then used as a reference to carefully mark where two opposite screw holes would be located. Each hole was drilled, checked for clearance, then screws were immediately put in place to hold the payload in a constant position. The remaining integration holes were then marked and drilled. Figure 4-17 below shows these screws holding the payload frame in place. Figure 4-17: Payload Integration Screws Holding Payload Frame in Place The lower coupler is held in place by six 6-32 ½ screws in the bottom of the upper airframe, and six 2-56 nylon shear pins in the top of the lower airframe. These screws were arranged, marked, drilled, and tapped as described above. 4.2 Recovery Subsystem Structural Elements Harnesses and Attachment Hardware The shock cords will be ½ tubular nylon and will connect the airframe to the parachutes. Quick links will be used as the hardware for the attachment points. Of the threes eye bolts ordered, one was mistakenly placed on an avionics bay bulkhead. The error was not realized with enough time to ship another eye bolt, thus, a ⅜ forged steel eye bolt with a 1.5 long thread (thread does not go up to 22

23 the shoulder like the other eye bolts) was purchased from a local hardware store. It is rated for 1200 lbs which is comparable to the original eye bolts. It is attached to the bulkhead with a washer, hex nut, and Scotch Weld epoxy. A CAD model of the bulkhead and the replacement eye bolt can be found in Figure The shock cord for the main chute attaches to a ⅜ eye bolt on the top of the avionics bay as well as a U-bolt in the nose cone. For the drogue, there will be another ⅜ eye bolt attachment on the forwardmost motor centering ring as well as the 1200 lbf rated eye bolt on the third bulkhead located inside the coupler between the lower and middle airframe. The line attachment for the main parachute consists of a 1500 lbf rated swivel joint. Both the fore and aft shock cords will be 250 long or about 3 body lengths to ensure adequate separation of vehicle components during descent. OpenRocket simulations show a max acceleration of 428 ft/s 2 resulting in a max vertical force of 325 lbf. This gives a minimum factor of safety of 4 for the attachment hardware. Figure 4-18: Bulkhead with replacement eye bolt CAD assembly Bulkheads The bulkheads are ½ thick birch plywood. The schematics for the two bulkheads on the avionics bay can be found in Figure There are ⅜ holes for the eye bolts, 5/16 holes for threaded rods, and slots cut out for the electronic connectors. However, the bottom bulkhead was drilled incorrectly. There should not have been an eye bolt placed in that bulkhead. 23


24 The third bulkhead has a ⅜ hole drilled in the center and another ¼ hole for ejection wires to pass through. A schematic of the third bulkhead with the eye bolt can be found in the section above. A basic stress analysis was done in the CDR on the bulkheads assuming a ¼ eyebolt. Doing the same tensile stress analysis with the ⅜ eye bolt, the cross-sectional area is square inches resulting in a stress of 2943 psi. There will also be a bearing stress as the force on the bolt is transferred to the bulkhead. The bearing stress is calculated from the projected area of contact calculated as square inches, giving a stress of 458 psi. Both these stresses are less than those calculated before with a ¼ eye bolt ensuring the design is safe. Furthermore, a basic finite element analysis was done on the bulkhead in NX assuming a max vertical force of 325 lbf on the ⅜ hole for the eyebolts. The results for the von Mises stresses can be found in Figure From this analysis, the max stress would be MPa or about 5500 psi. Given the difficulty of finding an exact value for the ultimate strength of plywood, a typical range of strengths is between 4,500 to 6,000 psi. Though this max stress gives a factor of safety of 1.1, looking at the figure, the majority of the area around the hole is green which means a stress of about 20 MPa. Using this stress results in a factor of safety of about 2. Figure 4-19: Top and bottom bulkheads for avionics bay 24

25 Figure 4-20: Von Mises Stresses on bulkhead Ejection Plastic blast caps will be placed on the top bulkhead of the avionics bay and on the bulkhead located in the coupler between the lower and middle airframe. The blast caps are filled with black powder and are ignited at the desired altitude with electrical charges. It is calculated that the main will need 2 grams while the drogue will need 3 grams of black powder. The drogue will be deployed at apogee when the first pair of charges are detonated and the main chute will be deployed at 700 feet when the second charge pair triggers. Nomex parachute protectors as well as thermal insulation will protect the parachutes from the heat effects of the charges firing. Upon detonation, these charges will increase the pressure in their respective body sections by approximately 12 psi. Assuming the black powder gasses only do work on the bulkheads, which have an area of 28.5 square inches, this will create an ejection force of 340 lbf. The ejection force will be supported by six 2-56 nylon screws, each having a minimum shear force of 31 lbf. This creates a factor of safety of 1.8 for each ejection event. The separation of the rocket sections allows for the unfurling of the parachutes Electrical Elements and Schematics The altimeters and accompanying hardware are mounted on two plywood sleds within the avionics bay. The altimeters and 9V batteries for the recovery system are located on one sled whereas the circuit board, altimeter, and battery packs for the payload are mounted on the second sled. All batteries are mounted securely in battery packs. The avionics bay has sized static pressure holes at the 25

26 approximate location of the altimeters. These holes allow the bay to be at atmospheric pressure ensuring correct barometric altitude measurements. As a safeguard, the Raven3 also uses accelerometer based measurements to determine altitude if the barometric measurements fail. All wires entering and leaving the bay will attach at electronic connectors on the fore and aft bulkheads. The connector in the top bulkhead has 4 ports to hold the ejection charges for the main whereas the bottom connector has 12 ports to accommodate for the payload wiring as well as the ejection charges for the drogue. Due to the design of the connectors, a notch had to be made for the connectors to fit (Figure 4-21). In Figure 4-19, above of the avionics bulkheads, there are small screw holes next to the rectangular slots to attach the connectors to the bulkhead. However, the area where the screw holes would be placed was removed for the notch. Thus, the connectors were epoxied in to ensure a tight fit instead of using screws. Figure 4-22 shows an exploded view of the avionics bay. Figure 4-23 shows the electronic schematics for both altimeters. There will be four Hall Effect switches mounted on the inside of the avionics bay coupler. Three to arm the altimeters and one to turn the circuit board on and off. These switches will be turned on and off by running a magnet across the switch. To verify the Hall Effect sensor turns on the switch, there will be an audible beep from all three altimeters and a serial data stream from the payload electronics to the ground station user interface. Figure 4-21: Notch for the electrical connectors in avionics bay bulkhead 26

27 Figure 4-22: Exploded view of avionics bay Figure 4-23: Electrical schematics for altimeters Redundancy Features The recovery system has two redundancy features for both the altimeters and ejection charges. First, there are two independent dual deploy altimeters. Neither share any electrical connections and are powered by their own batteries. The independent batteries minimize the risk of power loss to both altimeters. In the event of one battery becoming disconnected, only one altimeter will lose power. Additionally, in the event that one altimeter malfunctions and doesn t trigger the ejection charges to deploy, the redundant altimeter will trigger the ejection charges. The second redundancy feature is the use of two electric charges at each separation section, one for each altimeter. Thus, there are four ports in the top and bottom electronic connectors in the avionics bay bulkheads dedicated to these redundant charges. This provides redundancy in the case that one of the electric charges malfunctions and fails to ignite the black powder, there will be a backup. 27
28 4.2.4 Selected Parachute The two parachutes chosen for the dual deploy system are the SkyAngle Classic II 60 from B2 Rocketry and the 2 ft Ballistic Mach II from Rocketman. The main parachute is a SkyAngle Classic II 60 with a surface area of 39.3 square feet and a weight of 18.2 oz. It is made from zero-porosity silicone-coated balloon cloth and has ⅜ tubular nylon suspension lines sewn around the canopy, rated for 950 lbf. The line attachment consists of a 12/0 nickel-plated swivel joint that can withstand 1500 lbf. As mentioned above, the maximum force on the main parachute and associated hardware will be approximately 325 lbf. This equates to the suspension lines having a factor of safety of 4.6. A 2 foot diameter Ballistic Mach II will be used for the drogue. It is made from ballistic-grade rip-stop nylon. OpenRocket simulations calculate a max force of 24 lbf on the drogue and associated hardware at apogee. Due to past experience with this parachute, there is no concern about its strength given the low force. From OpenRocket simulations, the drogue chute deploys at apogee and the rocket descend at about 87 ft/s. At 700 feet, the main chute will deploy slowing the rocket to a descent rate of 23 ft/s GPS Receiver and Transmitter A GPS receiver with a patch antenna and an Xbee radio transmitter will be used to track the rocket. The Xbee runs at a frequency of 900 MHz, uses a wattage of 250 mw, and data from the test flight showed a range of about a mile. During descent and after landing the Xbee will transmit the GPS data from the on board GPS module to the ground station for recovery Sensitivity of Electrical Elements to Transmitters The rocket has wires running to both black powder charges. The longest charge wire is about 40 inches. The rocket payload will also carry a RF transmitter. The altimeters create a voltage discharge across the black powder charges to detonate them at the correct altitudes. It is possible for the RF transmitter to induce a voltage across the wires which may prematurely detonate the black powder charges. To test this, 80 inches of wire were placed next to the RF transmitter. A 10 kohm resistor was used in place of a black powder charge, and an oscilloscope measured voltage across the wires. The RF transmitter was powered on, and any voltage change was noted. The RF transmitter was powered on for twenty minutes. The testing revealed no voltage change due to the RF transmitter. Given the transmitter is low power and the altimeters put 5 volts across the charges to detonate them, there is no concern about the functionality of the recovery system 28
29 hardware. To further ensure the safety of the electronics, they will not be turned on until the rocket is on the launchpad. 4.3 Mission Performance Predictions Mission Performance Criteria The vehicle subsystem has several performance criteria that must be met on launch day. Primarily, the launch vehicle must obtain an apogee as close to 5280 ft AGL as possible. OpenRocket, the launch simulation software that the RRS utilizes, does not take into account the effects the payload system will have on launch apogee. These effects include increased drag during the roll induction and counter-roll induction phases of the payload, as well as the intentional coast control during the last phase of the payload deployment. Therefore, the RRS has created simulations in OpenRocket that slightly overshoot the target apogee. Additionally, the launch vehicle must land within a half mile of the launch site, and each independent section must land with no more than 75 ft-lbs of kinetic energy. To meet these requirements, the recovery system is tailored to minimize lateral drift in various wind conditions, while slowing the descent of the rocket such that no independent section lands with excessive kinetic energy Simulated Mission Performance In the team s simulations of flight performance during design and construction, the rocket reaches an apogee of 5162 feet. The model used for this simulation is shown below in Figure Figure 4-24: Design Profile The maximum velocity is 727 ft/s. The time to apogee is approximately 16.5 seconds after ignition. The total simulated flight time was approximately 95.1s. Figure 4-25 below shows the the plot of this simulation. 29

30 Figure 4-25: Launch Simulation using Design Profile However, as described in section 4.4, the team realized that critical mass components were absent from this design. After correcting the simulation profile to correct for this, the model in Figure 4-26 below was used. Figure 4-26: Corrected Profile Figure 4-27 below shows the flight simulation plot with this corrected model. The apogee achieved is 4508 ft, with a time to apogee of 16.4 s. The maximum velocity was 612 ft/s. The total simulated flight time was 81.2 s. 30


31 Figure 4-27: Plot of simulation Comparison to Actual Flight Data Refer to section Stability Margin The stability margin for the rocket through the course of the flight is shown below on a plot from the corrected OpenRocket model. Figure 4-28: Simulated Stability Margin from Corrected Model 31
32 Center of pressure at Mach 0.3 is estimated at down from the top of the nose cone. At launch ready, the center of gravity is down from the top of the nose cone. Stability at points of interest can be seen above in Figure In particular, the launch vehicle satisfies the minimum 2.0 cal stability off the rail, and peaks at a stability of 3.35 cal immediately after motor burn out Kinetic Energy Analysis The rate of descent of the rocket upon impact is calculated from OpenRocket to be 23 ft/s. The nose cone and lower airframe are within 75 ft-lbf maximum. However, the payload ended up being heavier than expected at launch giving it a larger kinetic energy. The team is currently working on ways to lower the mass of the payload. Table 4-1: Calculated Kinetic Energy at Impact Independent Section Post Test Flight Kinetic Energy Nose Cone - Nose Cone, bulkhead, main chute = 2.6 lbs ft lbf Upper Airframe - 48 Phenolic Tubing, 2 Couplers, Payload, Avionics bay = 13.2 lbs Lower Airframe - 30 Phenolic Tubing, Motor Retainer, Motor Mount, Centering Rings, Fins,Fins Reinforcement, Motor Casing, Motor post burn out = 9.15 lbs ft lbf ft lbf Drift Calculations The calculated drift distances based on varying wind speeds can be found in Table 4-2 below. These values were calculated for a zero degree launch angle and assume that the vehicle drifts at the same velocity as the wind during a descent time of 78.9 s. This descent value was obtained from OpenRocket simulations. Table 4-2: Calculated Draft Distances for varied Wind Speeds Wind Speed (mph) Drift Distance (feet) 32
33 4.4 Full Scale Test Flight Launch Day Conditions The original launch day, March 4, 2017, had wind gusts nearing 30 mph, therefore the test flight was delayed until March 5. On March 5, wind speeds averaged under 5 mph. The sky was clear without a cloud in sight. Temperature during the launch was approximately 21 degrees fahrenheit. The approximate longitude and latitude of the launch site were 42.66, Simulated Performance The original design simulations in OpenRocket predicted an apogee of 5162 ft. The ascent time was 16.9 seconds and the descent time was 78.9 seconds. No simulations have been completed on the effect of the deployable blades on the roll of the rocket except for one CFD analysis of the maximum potential induced angular velocity if the blades were deployed at burnout until apogee. This maximum angular velocity was 25 radians per second Flight Data Data from the test flight was retrieved from the Raven3 altimeter. The data gives apogee at 4613 feet which is consistent with the Stratologger reading out a value of 4608 feet. The ascent time was seconds. The max axial acceleration is g or 695 ft/s 2. The figures below show the plots from the Raven data. In terms of qualitative data, the only visible damage to the rocket was to a minor fracture to the lower coupler. This damage was caused by the high landing kinetic energy of this section as shown in section Figure 4-29: Altitude vs Time 33
34 Figure 4-30: Velocity vs Time Figure 4-31: Axial Acceleration vs Time 34

35 Figure 4-32: Flight data from Raven Comparison of Simulation and Actual Data The error of the Open Rocket simulated apogee was 12.02% (calculated using the flight results as the actual result). After massing the rocket and comparing the OpenRocket file to the actual values, it was noticed that a crucial component of the vehicle was missing from the simulation. The components within the avionics bay, weighing approximately 3 lb, were not included. Upon adding the avionics bay mass and tweaking that of the payload, the OpenRocket simulations read 4519 ft, only about 100 ft lower than the actual, which can likely be explained with the cold weather conditions Calculated Center of Pressure The calculated center of pressure is in aft of the tip of the nose cone. 35
36 5. Payload Criteria 5.1 As-Built Design The objective of the payload system is to satisfy Experiment Requirement 3.3 as well as Vehicle Requirement 1.1. The as-built design conforms closely to the design laid out in the Critical Design Review. The payload system still consists of two sets of three extruded airfoil blades that are oriented at opposing angles of attack. The timeline is laid out in table 5-1. Phase Zeroing Phase Roll Phase Counter-Roll / Rezeroing Phase Active Drag Phase Table 5-1: Payload Timeline Action Post motor-burnout. Gyroscopes will detect residual roll and deploy blades to eliminate remaining angular velocity. First set of blades deployed. Angular position and velocity tracked by gyroscopes and magnetometer while deployment length is adjusted accordingly. First set of blades is retracted while second set is deployed in order to counter the induced roll. Angular position and velocity are again tracked and the deployment length is adjusted accordingly. Following Rezeroing. Both sets of blades are deployed at equal lengths in order to actively decrease vertical velocity of the rocket. The microprocessor actively monitors altitude and velocity in order to match an idealized altitude model Structural Elements These subsections detail the major mechanical components of the payload design with insight into the engineering process of design choice and manufacturing Blades Made of Delrin, the six extruded airfoil blades are modeled after the NLF15 airfoil. Delrin was chosen for its high strength over density as well as its machinability. This airfoil was chosen for its high lift vs drag characteristics at likely Reynold s numbers and its relatively high thickness percentage. The airfoil profile was machined using a CNC mill at one of RPI s machine shops. As previously mentioned, the blades are deployed into the flow in groups of three in order to torque the rocket, inducing a roll. The onboard microprocessor 36



37 controls the deployment. The second set of blades is oriented at an opposite angle of attack and is deployed while the first is retracted. This will de-roll the rocket. After the payload phase, both sets are deployed to act as active drag control. Figure 5-1: CAD Blade Figure 5-2: Machined Blade Cam System Design Each cam system utilizes a set of three plates, named: the cam plate, linear plate, and motor plate. A threaded rod will connect to each blade and run through slots in the linear and cam plates. The threaded rods will be fitted with miniature rollers to decrease friction during deployment. The assembly instructions will be detailed in section Figure 5-3: Exploded View Half Mechanical Payload 37
 are constructed out of 6061 series aluminium for their rigidity, strength, and machinability.")
38 The cam design was chosen as this 7th order polynomial ensures constant jerk. This will allow for a smoother and more accurate deployment. The cam plates themselves (along with the linear and motor plates) are constructed out of 6061 series aluminium for their rigidity, strength, and machinability. The plates were manufactured using a waterjet machine. Figure 5-4: Cam, Linear, and Motor Plates The cam plates will be secured to the stepper motor through a central shaft. The shaft is to be secured to the motor through a set screw and to the cam plate using three fasteners. The shafts are simple aluminium pieces constructed from stock aluminium using a lathe and mill Payload Can In order to ease assembly, the entire mechanical portion of the payload is constructed outside of the rocket body before installation. The entire assembly is referred to as the payload can. The hardware list for the complete contents of the payload can is located in section
39 Figure 5-5: Payload Can Full Assembly Render The payload can is constructed from the six plates and six struts (constructed from thin aluminum struts). The struts are fastened to each of the linear and motor plates using L-brackets. The cam plate is secured to the system through the shafts mentioned in section In addition to the six structural struts, twelve constraining struts will be mounted on either side of each of the six blades. The purpose of these struts is to ensure radial deployment of the blades. The constraining struts will be attached to the payload can through L-brackets and fasteners Assembly of Payload As mentioned in section , a major driving factor for the design of the payload was the ease of assembly on launch day. This requirement drove the design of the payload can. This subsection will show the assembly instructions for the payload. Procedure for Each Three-Blade System 1. Threaded rods are screwed into each blade through the threaded hole. 2. Attach nuts and rollers onto the threaded rod such that the rollers are centered along the plane of the linear and cam plates 39
 M3 fasteners 5. Attach motor shaft to motor using a set screw (4-40) 6.")
40 3. Attach L-brackets to the linear and motor plates using the following fasteners: - Linear Plate: 6 small brackets (4-40), 12 large brackets (6-32) - Motor Plate: 6 large brackets (6-32) 4. Attach motor to motor plate using (x4) M3 fasteners 5. Attach motor shaft to motor using a set screw (4-40) 6. Attach motor shaft to cam plate using (3x each) 4-40 fasteners Repeat Steps 1-6 for Other Three-Blade System 7. Attach payload can struts (x6) and blade constraint struts (x12) using 6-32 fasteners (x48) 8. Route aft motor wires though payload can 9. Secure motor wires and ejection wires to the bulkhead connector terminal in the fore section of the payload section (Consult Ryan and/or wiring diagram) 10. Connect batteries to Hall Effect switches 5.2 Instrumentation Specifications The electronic payload contains two instruments that are read. A stratologger serves as an altimeter, and an Adafruit module provides magnetometer, gyroscope, and acceleration data. 40
41 Tests showed that the altimeter data was essentially useless. Numbers came to the Arduino out of order through the serial line. This problem appeared to be on the Stratologger s end. The gyroscope/accelerometer/magnetometer all have variable precision dependent upon the range set but the user. Table 5-2: Accelerometer Sensitivity Accelerometer Measurement Range 2g 4g 8g 16g Sensitivity 1mg/LSB 2mg/LSB 4mg/LSB 12mg/LSB Table 5-3: Magnetometer Sensitivity Magnetometer Measurement Range 1.3gauss 1.9gauss 2.5gauss 4.0gauss 4.7gauss 5.6gauss 8.1gauss Sensitivity >980 LSB/gauss >760 LSB/gauss >600 LSB/gauss >400 LSB/gauss >355 LSB/gauss >295 LSB/gauss >205 LSB/gauss Table 5-4: Gyroscope Sensitivity Gyroscope 250dps 500dps 2000dps 8.75mdps/digit 17.50mdps/digit 70mdps/digit 41
42 5.3 Payload Electronics The payload electronics consist of various modules attached to a neutrino on a PCB Power Regulation Figure 5-6: Regulator Schematic The electronics of the payload are powered by either 9V or batteries. The 9V batteries power the recovery altimeters and the altimeter used to feed data into the main PCB. The two batteries are wired in series and power the main PCB. These two batteries provide ~3.7V with a capacity of 3300mAh. The battery supply is regulated down to two independent 5V power supplies using two switching voltage regulators. One regulator provides power to the two stepper motors. The second regulator provides power to the rest of the components on the PCB. The two switching voltage regulators convert the 7.4V+ down to a stable 5V supply efficiently. The additional components on the regulators were chosen based on recommendations from the voltage regulator s datasheet. The circuit consumes roughly 150mA while powered. This increases to roughly 1A when the stepper motors are powered. The circuit consumes 4mA while turned off On/Off Switching Custom Hall Effect switches are used to turn the electronics of the rocket on and off. These switches consume 4mA passively and measure the magnetic field strength. When the field strength exceeds a certain threshold, the switch latches either high or low impedance. By using a pullup resistor, the latching can be converted into a high or low logic signal which can be fed to the gate of a power MOSFET transistor. This transistor serves as a switch and provides power to the rest of the circuit. 42

43 Figure 5-7: Hall Effect Switch Schematic These switches are designed to be pure switches, and leave any indication of being on/off to the circuit being powered. Because of this, we determine when switch is powered by using the audible beeps of the altimeters and the transmission of data from the xbee. This style of switch trades off hole alignment with passive power consumption. A 500mAh 9V battery can power the setup for up to 125 hours before fully draining. The batteries can power the switch for far longer. Figure 5-8: Hall Effect Switch Layout This passive power consumption means that the batteries will need to be inserted at most a day or two before launch. The rest of the electronics are designed in such a way that the assembly of the electronics is quick. Every wire either terminates to a plug or to a screw terminal. No soldering is needed and the entire electronic sled can be completely disassembled, except for the battery holder. The team finds that the advantage gained from using these switches outweighs the passive power consumption. 43
44 5.3.3 Control Board Figure 5-9: Control Board Schematic The control board for the rocket consists of an accelerometer, gyroscope, magnetometer, sd card, gps, xbee radio, and two h-bridges for the stepper motors. These components are controlled by an Arduino Zero clone called the Neutrino. Each part was individually tested with the microcontroller. The connections for each part were recorded and then transferred onto a schematic created using EAGLE. 44

45 Figure 5-10: Control Board This board was ordered from Seeed and was assembled by hand. The electronics were setup to transmit data and save it to the SD card simultaneously. The hardware of the electronics worked well. There was a single mistake with the PCB layout. A part had two pins switched in the EAGLE library. This was fixed by cutting a single trace and soldering a single wire to replace the connection. 5.4 Lessons Learned from Full-Scale Test Flight The full-scale launch revealed some areas of improvement for the payload system. The major concern of the team is the friction of the system. The extreme friction between plates and rollers/nuts causes difficulties in deploying the blades. The team is currently brainstorming minor changes such as added lubricant and a change of materials for the plates. Changing the aluminum plates to a self-lubricating material such as Teflon could help avoid these issues. Another solution would be to decrease the distance between the plates. When the cam plate is torqued, the threaded rod sometimes does not stay perfectly parallel to the axis of the rocket. If this could be improved, the deployment could be smoother. We learned that we need to reconsider our antenna for our ground station. The small antenna we used lost connection about a quarter second into flight. It recovered the connection before landing. We will look into getting a directional antenna and will consider having a person manually track the rocket during launch and landing. 45
46 6. Safety 6.1 Safety Officer The RRS has identified Philip Hoddinott as the acting safety officer. His responsibilities include ensuring shop safety and hazardous material procedures, which is partly accomplished through safety quizzes administered by the RPI School of Engineering. He will oversee the safe construction and launch of the pertinent rocket vehicles through supervision and inspections. He will monitor or designate a monitor for all RRS lab meetings. 6.2 Personal Hazard Analysis The RRS has conducted a thorough evaluation of all possible hazards that may affect any rocket personnel. The safety officer Philip Hoddinott is in charge of ensuring the safety and security of all rocket team activities. He has the right to allow or prohibit team members from working on projects. He is responsible for making sure all team members are properly trained on safety when it comes to handling chemicals, using machine tools, and fabricating the rocket. All team members are required to take RPI s lab safety course. This enssuers they know how to safely handle machine tools, materials, and chemicals. The following table summarizes hazardous materials, chemicals, and machine tools team members may encounter. Table 6-1 below shows material related risks and their corresponding mitigation. Required safety equipment and emergency treatment equipment are also listed. Material Table 6-1: Material Risks to health and Risk mitigation Risk to personnel health Mitigation Required Safety Equipment Emergency Equipment Black Powder Skin, eye, and respiratory irritation. Fire and explosive risk. Keep away from ignition source. Have fire extinguisher on hand. Work in ventilated, spacious area. Wear eye protection and protective gloves. Face masks, gloves, glasses Fire extinguisher and fire blanket. First aid kit, eye flushing station Fire extinguisher Hydrogen Peroxide Fire risk Skin, eye, and respiratory irritation Work in ventilated, spacious area. Wear eye protection and protective gloves. Face masks, gloves, glasses First aid kit, eye flushing station Acetone Skin, eye, and respiratory irritation Work in ventilated, spacious area. Wear eye protection and protective gloves. Face masks, gloves, glasses First aid kit, eye flushing station West System 105 Epoxy Skin, eye, and respiratory irritation Work in ventilated, spacious area. Wear eye protection and protective gloves. Face masks, gloves, glasses First aid kit, eye flushing station 46
47 Material Risk to personnel health Mitigation Required Safety Equipment Emergency Equipment JB Weld Skin, eye, and respiratory irritation Work in ventilated, spacious area. Wear eye protection and protective gloves. Face masks, gloves, glasses First aid kit, eye flushing station Scotch weld Skin, eye, and respiratory irritation Work in ventilated, spacious area. Wear eye protection and protective gloves. Face masks, gloves, glasses First aid kit, eye flushing station Loctite Super Glue Skin, eye, and respiratory irritation Work in ventilated, spacious area. Wear eye protection and protective gloves. Face masks, gloves, glasses First aid kit, eye flushing station Cesaroni Pro75 Profire Igniter Fire / burn risk Will be handled on site, outside with operating wearing face and body protection. Fire extinguisher will be on hand. Gloves and Glasses. Fire extinguisher on hand. First aid kit. Cesaroni Pro75 Profire Motor Fire / burn risk Will be handled on site, outside with operating wearing face and body protection. Fire extinguisher will be on hand. Gloves and Glasses. Fire extinguisher on hand. First aid kit. Solder Skin burns and respiratory irritation Work in ventilated, spacious area. Wear eye protection and protective gloves. Face masks, gloves, glasses First aid kit Sanding Skin abrasions and respiratory irritation Work in ventilated, spacious area. Wear eye protection and protective gloves. Face masks, gloves, glasses First aid kit G10 Fiberglass board Skin, eye, and respiratory irritation Work in ventilated, spacious area. Wear eye protection and protective gloves. Face masks, gloves, glasses First aid kit, eye flushing station The following tables explain the Risk Assessment Codes (RACs) used to evaluate the potential hazards in the NASA USLI launch. RACs are presented for the initial hazard, as well as for the hazard remaining after controls and mitigations have been applied. Table 6-2 identifies the color-coded RACs, which will be referred to later when assessing individual risks. Table 6-3 outlines the different levels of risk and their acceptance levels. In all cases, individuals involved in each task will be advised of the risks involved and proper safety precautions to be taken. 47
48 Table 6-2: Color Coded Risk Assessment Codes Severity Probability 1 Catastrophic 2 Critical 3 Marginal 4 Negligible A Frequent 1A 2A 3A 4A B Probable 1B 2B 3B 4B C Occasional 1C 2C 3C 4C D Remote 1D 2D 3D 4D E - Improbable E 2E 3E 4E Severity-Pro bability High Risk Medium Risk Low Risk Minimal Risk Table 6-3: Different Levels of Risk and Their Acceptance Levels Acceptance Level/Approving Authority Unacceptable. Documented approval from the MSFC EMC or an equivalent level independent management committee. Undesirable. Documented approval from the facility/operation owner s Department/Laboratory/Office Manager or designee(s) or an equivalent level management committee. Acceptable. Documented approval from the supervisor directly responsible for operating the facility or performing the operation. Acceptable. Documented approval not required, but an informal review by the supervisor directly responsible for operation the facility or performing the operation is highly recommended. Use of a generic JHA posted on the SHE Web page is recommended, if a generic JHA has been developed. 6.3 Personnel Risks The following table shows the personal hazard risks associated with the project, their risk ratings, and their mitigation strategies. 48
49 Table 6-4: Personnel Hazard Risk Assessment Risk Cause Overall Effect RR Mitigation Strategy Verification PMRR Irritation of skin. Exposure to chemicals (epoxy, black powder, super glue). Irritation of eyes. Chemicals / particulate / fast moving debris come in contact with eyes. Irritation of lungs. Chemicals / particulate inhaled. Chemical / Heat Burn. Black powder ignition near team member. Severe static shock. Limb caught in machine. Fire in Lab. Skin contact with soldering iron. Chemical contact with skin. Static discharge. Premature voltage discharge. Static buildup on equipment or team member. Untied long or loose hair. Loose fitting clothing Fire can be caused by a wide range of accidents, including electrical and chemical sources. Team member may suffer, delayed timeline. Serious risk to vision and health. Serious risk to lungs and health. Serious risk of burns and/or scarring. Skin burns. Hearing damage. Damage to rocket electrical components. Premature black powder ignition. Serious risk of permanent injury or death. Serious risk of permanent injury or death. 3C Protective gloves will be worn while handling chemicals. Team members to be instructed on how to remove gloves without contact to skin. 1C Safety glasses will be worn during all activities involving chemicals and machinery. 1B Masks will be worn during all activities involving chemicals. Chemicals will only be handled in well ventilated areas. Soldering will be done in well ventilated areas. 2C All personnel soldering must receive training. Gloves are to be worn when using chemicals. All personnel will be made aware of first-aid kits and proper burn treatment. 1C All personnel working with black powder will be grounded. Thick gloves will be worn. 2C Team members handling electronic equipment will be grounded. 1B Team members working with machines will tie long hair back and wear tight fitting clothing. 1C Maintain properly cleared exits. No smoking or any other activity that uses a lighter or open flame. Proper usage of tools and chemicals. Use of PPE: 3E gloves, safety goggles, and masks when handling certain chemicals. Use of PPE: safety goggles and gloves when handling certain chemicals. Use of PPE: gloves, safety goggles, and masks when handling chemicals. Use of PPE: gloves and safety goggles when handling chemicals. Consultation and reference to MSDS. Completion of RPI s shop safety assessment. Completion of RPI s shop safety assessment. Completion of RPI s shop safety assessment. Fire extinguisher was installed in shop. 1E 1E 2E 2E 2E 1E 1D 49
50 Risk Cause Overall Effect RR Mitigation Strategy Verification PMRR Tripping hazard in lab. Persons in lab may trip over objects. Unclean lab space could injure persons attempting to leave lab. 3B Maintain properly cleared exits. Keep Lab space trash free. Lab is cleaned by officers after every session. 3D Safety Officer Unavailable. No identifiable person is in charge of ensuring that adequate safety operations are followed. Possible increased likelihood of other risks. 2B Numerous students involved in the club are Level 1 certified by TRA and NAR. All participants briefed on safety operations. Safety officer designates a competent club member as acting Safety Officer if he will be absent. 2D 6.4 Vehicle Risks The following tables show vehicle safety risks, possible causes, risk ratings, and mitigation strategies. 50

51 Table 6-5 Launch Vehicle Safety Risk Analysis 51
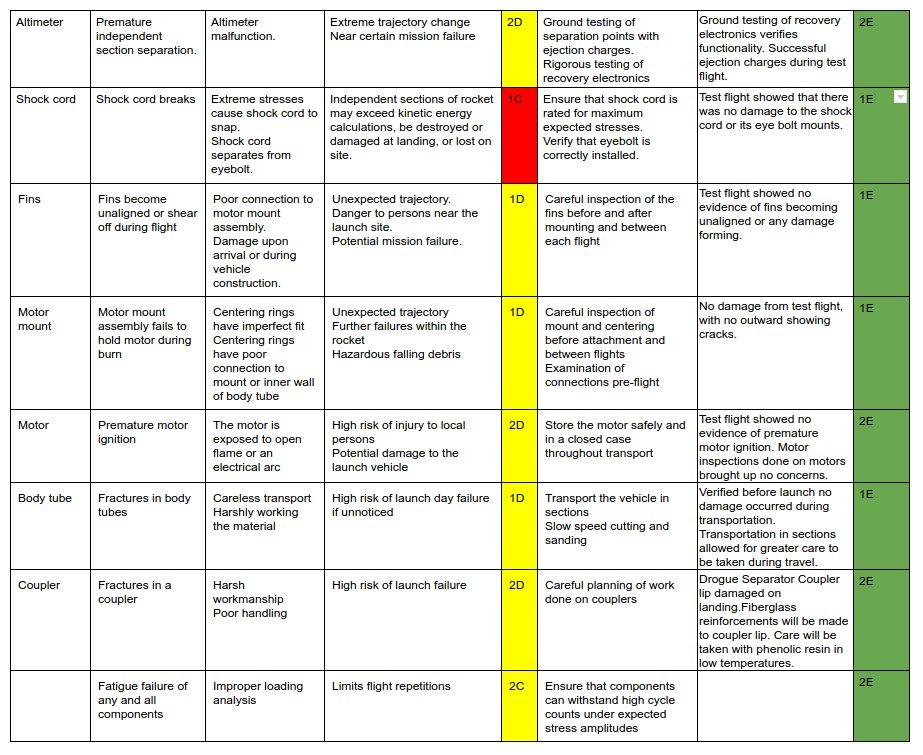
52 52


53 6.5 Payload Risks The following table shows payload safety risks, possible causes, risk ratings, and mitigation strategies Table 6-6 Payload Safety Risk Analysis 53

54 6.6 Environmental Risks The following table shows the environmental safety risks, possible causes, risk ratings, and mitigation strategies. Table 6-7: Environmental Safety Risk Analysis 54

55 Table 6-8: Environmental Impact of Rocket Risk Analysis 6.7 RF Safety Analysis The team rocket will have wires running to both black powder charges. The longest wire will be no longer than 20 inches. The rocket payload will also carry a RF transmitter. The altimeters create a voltage discharge across the black powder charges to detonate them at the correct altitudes. It is possible for the RF transmitter to induce a voltage across the wires which may prematurely detonate the black powder charges.to test this, 80 inches of wire [details] was placed next to the RF transmitter. A 10kohm resistor was used in place of a black powder charge, and an oscilloscope measured voltage across the wires. The RF transmitter was powered on, and any voltage change was noted. The RF transmitter was powered on for twenty minutes. The testing revealed no voltage change due to the RF transmitter. While further testing will be done, the team believes the black powder charges will be safe. The transmitter is a low power transmitter, and the altimeters put 5 volts across the charges to detonate them. Additionally the wires in the rocket are a quarter the length of the tested wire. 55
56 6.8 MSDS All Material Safety Data Sheets are available on the team website: 56
57 7. Launch Operations Procedures In order to promote a safe and successful operation at each launch event, the RRS has created both an item check list and a launch operations procedures list. Table 7-1 below lists every component, material, and tool necessary for a launch. Items are roughly categorized into which subsystem they primarily belong to. Table 7-1: Item Checklist for Pre-Launch Operations Subsystem Item Quantity Vehicle Launch vehicle (including all airframe sections, couplers, bulkheads, and nose cone) 1 Vehicle 75 mm Motor retainer cap 1 Vehicle mm Motor adapter set 1 Vehicle Aerotech L1000 motor 1 Vehicle 6-32 structural screws 18 Vehicle ¼-20 payload integration screws 12 Vehicle 2-56 nylon shear pins 12 Recovery Drogue Parachute 1 Recovery Main Parachute 1 Recovery Shock cord segments 2 Recovery Nomex shock cord sleeves 2 Recovery Nomex blankets 2 Recovery Thermal insulation 2 Recovery Quick links 4 Recovery Pre-measured black powder 4 Recovery Blast caps 4 Recovery Assembled electronics sled 1 Recovery and Payload Standard 9V batteries 3 Payload Drag blades 6 57
58 Subsystem Item Quantity Payload Motor plates 2 Payload Linear plates 2 Payload Cam plates 2 Payload Structural struts 6 Payload Constraining struts 12 Payload Structural (large) L-brackets 36 Payload Small L-brackets 24 Payload Pan-head 6-32 screws (L-brackets to plates) 24 Payload Flat-head Countersunk 6-32 screws (struts to L-brackets) 48 Payload Motor shafts 2 Payload 4-40 screws for small L-brackets 24 Payload Miniature Rollers 12 Payload ¼-20 Nuts 18 Payload Stepper motors 2 Payload Motor fasteners (M3) 8 Payload 4-40 set screws 2 Payload Batteries (including back ups) 4 Payload SD Card 1 Payload Computer for ground station software 1 General Phillips head screwdriver set 1 General Alan wrench set 1 General Wrench set 1 General Electronics tools set 1 General Soldering iron and solder 1 General Extra wires 1 58
59 Table 7-2 lists the launch operation procedures, categorized by operation stage. Preconditions must be met before a step can be executed, and postconditions describe the result of successful execution of each step. Possible resulting hazards from incorrect execution or skipping of a step are also listed. This list is for the first time assembly and launch of the vehicle and payload systems. Some steps, such as tying loops into shock cord, will only be performed for the first test launch. Table 7-2: Launch Operations Procedures Stage Preconditions Step Postconditions Possible Resulting Hazards General Preparation Components gathered according to Table 6-1 above Ensure all parts, materials, and tools are accessible to the team All parts, material, and tools are accounted for. Absence of parts, materials, or tools may delay or prohibit safe launch of the vehicle or functionality of the payload Recovery Preparation Shroud Lines attached to Main and Drogue Parachutes are untangled and neatly arranged Tightly fold parachutes into packing shape according to Appendix C. Wrap shroud lines around each chute to secure shape. Store in individual bags Parachutes are folded in preparation for packing. Incorrect folding may hinder the packing process, lead to poor parachute deployment, or damage shear pins Recovery Preparation Shock cord is free of any undesired loops or knots; Nomex sleeve is on shock cord Tie a knot in each length of shock cord to form a loop offset from the midpoint. Attach a quick link to the loop, and the appropriate parachute shroud lines to the quick link Parachutes are correctly mounted to their shock cord lengths. Ensure all shroud lines are properly connected to quick links Incorrectly tied knots may come undone and lead to recovery system failure. Incorrect attachment of parachutes may lead to recovery system failure. Recovery Preparation Parachutes are correctly mount to prepared shock cords Tie loop knots at both ends of each shock cords. Run main shock cord through upper airframe. Attach a quick link to each loop, then attach each quick link to the appropriate recovery hardware mounting point Parachute and shock cords are correctly attached to each recovery hardware mounting point Incorrectly mounting recovery hardware could lead to independent sections descending without a parachute, posing a hazard to team members and spectators Stage Preconditions Step Postconditions Possible Resulting Hazards 59
60 Payload Preparation Static testing of system, assembly, and parts Assemble payload according to section Payload is fully assembled. Assure proper function of payload outside of launch vehicle Improper assembly may result in payload malfunction, which could potentially alter vehicle flight. Payload Preparation Proper assembly of payload subsystem has been verified Connect stepper motor and intermediate ejection charge wires to the avionics bay terminal block connector Stepper motors and ejection charge terminals are correctly wired to avionics bay terminal block connector Improper wiring of electrical systems may compromise the functionality both the payload and drogue recovery systems Payload Preparation Proper assembly of payload subsystem has been verified. Insert payload into launch vehicle. Ensure avionics bay terminal block connector is accessible. Secure into place with 12 ¼-20 integration screws Payload is secured in launch vehicle; terminal block connector is easily accessible. Improper installation may result in unsecured mass and improper payload function. Failure to ensure wire accessibility may prohibit further assembly Motor Preparation All motor parts accounted for. Club mentor present Remove motor from sealed tube package, and thoroughly inspect for any signs of damage. Set aside components for delayed ejection charge that will not be used. All motor components are accounted for and free of any sign of damage. Approval from club mentor to continue with assembly Failure to detect signs of damage may lead to total motor failure and launch vehicle damage or loss Motor Preparation Motor components inspected. Club mentor present Insert the ejection charge cap WITHOUT adding any black powder. Motor correctly assembled under the supervision of the club mentor Adding black powder to motor ejection charge may lead to premature drogue deployment Motor Preparation Motor correctly assembled. Club mentor present Install motor adapter on motor. Ensure centering ring piece is installed 14 inches from the rear of the motor. Motor adapter correctly installed under supervision of club mentor Improper installation of motor adapter may lead to motor retention failure and launch vehicle damage or loss Stage Preconditions Step Postconditions Possible Resulting Hazards 60
61 Motor Preparation Motor adapter correctly installed Carefully insert motor mount, and place adapter spacer in retainer. Secure with motor retainer cap, ensuring that the spacer is properly centered Motor properly inserted and secured in vehicle Failure to properly insert and secure motor could lead to launch failure and damage or loss of launch vehicle Recovery and Payload Preparation Electronics sled assembled. Threaded rods in avionics bay attached to one bulkhead Slide electronics sled onto threaded rods. Connect wires for arming switches to appropriate terminals Electronics sled is wired to arming switches Failure to correctly wire arming switches could prevent payload and recovery systems from activating Recovery and Payload Preparation Electronics sled in place and wired to arming switches Slide other bulk head into place. Ensure bulkheads are aligned with respect to the coupler section. Tighten both sets of hex nuts at the end of each threaded rod Avionics bay is assembled and ready for insertion into the airframe. Improper assembly of avionics bay could interfere with altimeter readings Recovery and Payload Preparation Avionics bay is assembled and verified Connect terminal block connectors to the top and bottom bulkheads of the Terminal blocks to both sets of ejection charges and both stepper motors are connected to the avionics bay bulkheads Failing to properly connect the terminal blocks to the electronics sled could lead to both payload and recovery system failures Recovery Preparation All sources of heat and flame removed from vicinity. Rubber gloves doned for those handling black powder Insert stripped wires into blast caps and seal back end with quick set epoxy. Load pre-measured amounts of black powder into each cap, seal with tape, and pack with dowel Ejection charges ready for installation Incorrect amount of black powder or preparation of blast caps could result in recovery system failure or vehicle damage. Poor packing or sealing of ejection charges could lead to recovery system failure Stage Preconditions Step Postconditions Possible Resulting Hazards 61
62 Recovery Preparation All recovery electronics are powered OFF. All sources of heat and flame removed from vicinity Attach ejection charges to appropriate screw terminals on appropriate bulkheads. Ejection charges installed Incorrect installation of ejection charges may lead to recovery system failure or vehicle damage Recovery Preparation Drogue parachute folded and correctly attached to mounted shock cord Pack thermal insulation into lower airframe. Roll any unprotected shock cord and shroud lines into folded drogue, wrap parachute in Nomex blanket, place ejection charges in airframe, then pack into lower airframe Drogue parachute is packed; parachute and shock cord are protected from motor and ejection charges Unprotected parachute or shock cord may be damaged by motor or ejection charge detonation, which may lead to recovery system failure Recovery Preparation Main parachute folded and correctly attached to mounted shock cord Roll any unprotected shock and shroud lines into folded main parachute, wrap parachute in Nomex blanket, then pack into upper airframe. Pack small amount of thermal insulation. Main parachute is packed; parachute and shock cord are protected from ejection charges Unprotected parachute or shock cord may be damaged by ejection charges, which may lead to recovery system failure Vehicle Preparation Drogue parachute correctly packed inside lower airframe Conjoin upper airframe with lower airframe, then assemble with shear pins, taking care not to damage the pins Upper airframe is secured to lower airframe via shear pins Improperly securing the separation point may lead to recovery system failure. Damage to shear pins may cause recovery deployment failure Vehicle Preparation Main parachute correctly packed inside upper airframe Attach nose cone to upper airframe, then secure in place with shear pins, taking care not to damage the pins Launch vehicle is completely assembled Improperly securing the separation point may lead to recovery system failure. Damage to shear pins may cause recovery deployment failure Stage Preconditions Step Postconditions Possible Resulting Hazards 62
63 General Preparation Launch vehicle is completely assembled. Club mentor is present Double check final assembly with club mentor, paying close attention to shear pins Launch vehicle assembly is verified by club mentor Failure to detect any anomalies may cause various failures during launch Vehicle Preparation Launch vehicle is completely assembled and verified by club mentor Mark the center of pressure according to simulation profiles, and center of gravity according to balance point CP and CG are marked on vehicle; ready for RSO inspection Vehicle will not be permitted to launch unless RSO s minimum stability margins are satisfied General Preparation Launch vehicle is completely assembled, verified, and CP and CG are marked If the launch venue requires flight cards to launch, fill one out Launch vehicle information is given on flight card Vehicle will not be permitted to launch without submitting a flight card Recovery and Payload Preparation Launch vehicle is completely assembled and electronics are powered OFF Double check all electronics by individually arming each switch and waiting auditory or data transmitting cues. Turn all electronics back off prior to proceeding Functionality of electronic arming switches has been verified, all electronic systems are powered OFF Launching without verifying functionality of arming switches may cause payload or recovery system failures General Preparation Launch vehicle is completely assembled, CP and CG are marked, assembly and arming switches are verified Consult the RSO to be assigned a launch pad. Wait for all clear to enter launch area RSO is notified that vehicle is ready to launch, team has been assigned a launch pad N/A General Preparation Launch vehicle is assembled, marked and verified; RSO has given all clear to enter launch area Safely transport rocket to designated launch pad Rocket safely moved to designated launch pad Mishandling rocket could damage the launch vehicle. Special care should be taken to keep the rocket level and avoid disturbing shear pins Stage Preconditions Step Postconditions Possible Resulting Hazards 63
64 General Preparation Launch vehicle has been tras Carefully slide launch vehicle onto launch rail, then lift rail into upright position Rocket is correctly mounted on the rail in the upright position Rail buttons could be damaged if rocket is carelessly mounted on launch rail Motor Preparation Rocket is mounted upright on the launch rail Insert igniters all the way into the motor, and secure into place by lightly taping to launch vehicle. Short out igniter circuit Igniters are inserted into the motor, and ignition circuit is shorted out Improper insertion of igniters may lead to faulty motor ignition. Failure to short ignition circuit may lead to premature motor ignition Recovery and Payload Preparation Launch vehicle is mounted upright on launch rail with igniters inserted Turn on electronics for the recovery and payload subsystems. Wait for appropriate feedback from altimeters Electronic systems are engaged, and launch vehicle is completely prepared Failure to turn on electronics will result in payload or recovery system failure Motor Preparation Launch vehicle is mounted upright on launch rail with eletronics engaged and igniters inserted Unshort the igniter circuit, and attach the alligator clips from the ignition system Igniters are wired up to the ignition system Failure to correct wire ignition system may lead to faulty or dud ignition General Preparation Launch vehicle is mounted upright on launch rail with electronic engaged and igniters inserted If conditions are windy, send spotters down range to track vehicle launch Spotters are in place to track rocket in windy conditions Losing sight of rocket during launch decreases chances of successful tracking and recovery General Preparation Launch vehicle is completely prepared and ignition system is correctly wired Return to a safe distance, and submit flight card to LCO or RSO Rocket is ready to launch, registered with officials, and awaiting ignition Failure to notify correct personnel may delay launch Launch Rocket is ready and registered to launch Launch Launch vehicle has launched See section 4.5 Stage Preconditions Step Postconditions Possible Resulting Hazards 64
65 Post-Launch Recovery Vehicle has launched, and RSO has given all clear signal for recovery Use visuals, spotters, and GPS module to locate vehicle Visual confirmation from team members of landing site and/or GPS location obtained Failure to properly track or GPS locate vehicle during descent may lead to loss of vehicle. Post-Launch Recovery Vehicle has landed with visual or GPS confirmation of location Travel to landing location. Carefully ensure all energetics are inert. Inspect launch vehicle for initial damage. Wait for auditory reading from altimeter. All energetics have been confirmed inert or have been disarmed. Vehicle is inspected for damage, and audio feedback from altimeter has been recorded. Active energetics pose risk of detonating near team members. Post-Launch Recovery Vehicle has landed and been inspected by team members for damage and active energetics. Altimeter reading recorded Power OFF all electronics. Detach one quick link from each length of shock cord. Safely carry independent sections back to preparation area for further inspection All electronics are off, all sections of the launch vehicle have been recovered and returned to preparation area Mishandling of components could lead to damage. 65
66 8. Project Plan 8.1 Testing The table below gives a list of viable tests for the rocket. The majority of tests involve observing the rocket during the test flight and making sure all systems work. However, the tests for the payload were unable to be completed. As can be seen below, it was discovered that there was too much friction involved with the current design for the blades to deploy. There was not enough time before the test launch to fully fix the problem thus, our payload was not fully functional but still in the rocket for the test launch. Going forward, the payload team will work to develop modifications to reduce friction in the system. The team was planning on using the Instron machine to test the strength of the body tube. However, to complete the test additional mounting devices would have been necessary. The team decided against cutting the scrap body tube material into dog-bone shaped pieces that would fit in the machine. Doing so would not have given useful buckling results for the cylindrical structure. Table 8-1: Testing Plan Test # Subsystem Objective Success Criteria Testing Variable Methodology Results 01 Payload Static deployment test with 3 blades, cam/straight plates, and stepper motor. Equal deployment of blades in reasonable time frame Deployment length and time of deployment - Assemble Roll-Blade subsystem - Deploy blades, observing symmetry and deployment time Too much friction for blades to fully deploy. 02 Payload / Integration Clearance test for blade-slot interface No interference Distance between slots and blades - Assemble payload can inside body tube, aligning blades with slots - Deploy blades, checking for close clearances Visual inspection showed blades would fit but unable to test due to nonfunctional payload. 03 Payload Deployment given sample conditions Actively adjusting deployment given sample code Deployment length and time of deployment - Assemble Roll-Blade subsystem - Feed sample code into microprocessor - Observe deployment Payload not functional at test launch. 66
67 Test # Subsystem Objective Success Criteria Testing Variable Methodology Results 03 Recovery Ejection charge ground test Ejection charges separate desired section without damaging vehicle Strength of ejection charge - Assemble recovery system - Activate charge(s) - Observe deployment Ejection charges successfully deployed at test flight. 04 Recovery Parachute deployment test Rocket lands without damage Deployment altitude - Assemble recovery system - Observe parachute deployment Parachutes deployed at test flight and rocket landed with only slight damage to a coupler 05 Recovery Recovery system stress testing No components (eyebolts, bulkheads, etc ) fail and rocket lands without damage Forces on recovery system - Assemble recovery system - Observe parachute deployment Inspection of recovery system post test flight showed no damage. 06 Vehicle General assembly testing All components assemble as expected by the vehicle design Assembly time, ease of assembly, tools required - Assemble vehicle - Observe any difficulties or impediments Vehicle assembled multiple times before test flight and at test flight with no issues. 07 Vehicle Body tubing stress testing Test pieces of body tubing do not fail within expected stress ranges Forces on airframe - Create piece of body tubing suitable for testing - Use Instron machine for stress testing - Observe tolerable stress ranges Unable to complete stress test in Instron machine. However, the body tube did not buckle or break during the test flight which shows it can withstand the forces. 67
68 8.2 Requirement Verification Table 8-2: Requirement Verification Req # Requirement Definition Design Feature Verification Plan Testing Steps Proof of Verification Referenced Sections 1.1 Apogee between 5,280 ft and 5,600 ft if left unaltered Rocket Mass, Rocket Motor, Design OpenRocket Simulations Payload Mass Rocket material selection Motor Selection Stay as close as possible to original Mass Estimates Read apogee at several launches in different weather conditions The rocket does not meet the requirement. The OpenRocket simulation shows apogee at 4508 feet and the flight data from test flight returns an apogee of 4758 feet. The team is currently working on ways to reach 5280 feet Reusable Body Strength (fins, airframe, parachutes, etc.) Stress Analysis of Vulnerable Components Use of Large Factors of Safety in Critical Components Use High-Strength Epoxies Store all components Safely Design Followed Components inspected upon order arrival show no signs of damage Launch in appropriate weather multiple times Test flight was in good weather conditions. Only damage occurred to a couple at impact. Steps will be taken in future to strengthen coupler for impact Four or fewer Independent Sections General Design Design four or fewer independent sections for the launch vehicle Follow design Rocket is launched and recovered at most four independent sections Rocket was constructed using 4 sections Single Stage General Design, Motor Design Design only a single stage rocket Follow design Rocket is launched with only a single stage motor Purchased rocket is single stage. Launches rocket with a single stage motor at test flight
69 Req # Requirement Definition Design Feature Verification Plan Testing Steps Proof of Verification Referenced Sections 1.11, 1.13 Commercially available solid motor propulsion system not exceeding Class L Motor Ensure Mass and General Rocket Design allow for a motor not exceeding Class L approved by the TRA and NAR Follow design Stay as close as possible to original mass estimates Motor not exceeding Class L is used at several launches in different weather conditions Aerotech L1000 motor used in OpenRocket simulations and at test launch Capable of Launch by 12 V DC firing system Motor, Motor Retainer Select a motor retainer that allows for access to motor Select a motor able to be launched with 12V DC firing system Follow design Safely store motors Launch rocket on standard 12 V DC firing system multiple times Rocket launched with Aerotech L1000 motor using a 12 V DC firing system Minimum static stability margin of 2 Cal at rail exit Motor, Vehicle Design Use simulation data to ensure placement of vehicle CG and CP creates a static stability margin of at least 2 Cal Follow design Stay as close as possible to original mass estimates Update simulation profiles to reflect any change Launch rocket several times to ensure stability off the launch rail OpenRocket simulation shows a static margin of 2.80 Cal for rail exit
70 Req # Requirement Definition Design Feature Verification Plan Testing Steps Proof of Verification Referenced Sections 1.15 Minimum velocity of 52 f/s at rail exit Motor, Vehicle Design Use simulation data to select a motor with sufficient thrust to propel the rocket off the rail with a velocity of at least 52 f/s Follow design Stay as close as possible to original mas estimates Update simulation profiles to reflect any change Launch rockets several times, use flight data to ensure minimum exit velocity 103 ft/s at 10 ft altitude based on Raven data Electronic Dual Deploy General Recovery Design (parachutes, shock cord, ejection charges, etc.) General Design is Dual-Deploy Use of a Drogue and Main Parachute Design for Multiple Separation Points Design Followed Rocket launched with appropriate recovery system, Drogue and Main parachutes deploy at different points in flight Test flight had a successful dual deploy sequence
71 Req # Requirement Definition Design Feature Verification Plan Testing Steps Proof of Verification Referenced Sections 2.1 Drogue Deploys at Apogee, Main Parachute Deploys at much lower altitude Parachutes, ejection charges, General Rocket Design, Altimeters General Design has Drogue Parachute at First Separation Point and Main Parachute at another Simulations run with required deployment locations Follow design Set Altimeters to required ejection charge deployments (and keep track of which side is deployed when) Rocket launched multiple times with parachute deployment at required times Flight data from Raven3 confirms deployment at correct altitudes Shear Pins hold rocket sections together until Parachute Deployment Shear Pins, Ejection Charges Shear Pin Strength Accurately Calculated and inserted into Recovery Design Ejection Charge Strength Accurately Calculated Follow design Shear Pins show no signs of damage before install Rocket launched multiple times with parachute deployment at required times Post test flight observations of rocket show clear separation points at shear pins Req # Requirement Definition Design Feature Verification Plan Testing Steps Proof of Verification Referenced Sections 71
72 2.3 Independent Sections have less than 75 ft-lb of KE at Landing General Rocket Design (Mass), Parachutes Kinetic Energy of Each Independent Section Analyzed Accurately Follow design Stay as close as possible to original mass estimates Parachutes and Recovery system components show no signs of damage upon order arrival No damage or hard landing evident in any section after multiple test launches in varied flight conditions Post test flight recovery shows limited damage to rocket. Only couple had damage due to impact Redundant, Safe Altimeters Altimeters, Supporting Recovery Electronics Select at least 2 commercially available altimeters Design has an independent power supply to each Altimeter Follow design Altimeters stored safely All components of supporting electronics and altimeters tested before installation Recovery System Operates as Expected, Altimeters report similar apogees in all test launches Flight data from Raven3 confirms the altimeters worked correctly Teams shall design a system capable of controlling launch vehicle roll post motor burnout. Roll-Blade subsystem Roll-Blade subsystem is designed to control roll post burnout See Tests Unable to verify. Payload not fully functional at test flight The systems shall first induce at least two rotations around the roll axis of the launch vehicle. Roll-Blade subsystem CFD analysis confirms blades will impart enough torque to roll the rocket two full rotations post burnout. CFD, Tests Unable to verify. Payload not fully functional at test flight. 5.4 Req # Requirement Definition Design Feature Verification Plan Testing Steps Proof of Verification Referenced Sections 72
73 After the system has induced two rotations, it must induce a counter rolling moment to halt all rolling motion for the remainder of launch vehicle ascent. Roll-Blade subsystem The opposing set of blades will halt rotations. They are able to impart an equal force in the opposite direction. CFD, Tests Unable to verify. Payload not fully functional at test flight Teams shall provide proof of controlled roll and successful counter roll. Roll-Blade subsystem Redundant gyroscopes will log rotational data throughout the launch. Test 03 Unable to verify. Payload not fully functional at test flight Teams shall not intentionally design a launch vehicle with a fixed geometry that can create a passive roll effect. Fins Fins will be aligned as they normally would - parallel to rocket body in order to not induce a roll passively. N/A Fins constructed parallel to rocket body Teams shall only use mechanical devices for rolling procedures. Roll-Blade subsystem No compressed gas system or any other non-mechanical device will be used to impart a roll. N/A Payload built using only mechanical system
74 8.3 Team Derived Requirement Verification Vehicle Subsystem The team derived requirements for the vehicle subsystem are based on the target apogee, the structural integrity of the rocket, and the previous experience of the RRS in the NSLI competition. The difference in the apogee of the test launch to the target apogee of 5280 ft is 672 ft or 12.72% of the goal. The RRS has not had a successful competition launch before, so the team has set a more personal goal of reaching within 5% of the target apogee. Before the USLI competition last year, the RRS s rocket was damaged beyond repair in a test flight. For the competition in Alabama this year, the team goal is to have the rocket land with no damage having been inflicted on the vehicle. The RRS has not yet had a successful launch at the USLI competition. The goal for the RRS in this year s competition is to have a numerical score in each category Payload Subsystem The team derived requirements for the payload subsection are based off the competition goal of two successful rotations and the previous experience of the RRS in the NSLI competition. Due to a high amount of friction, the rocket was unable to rotate in the test flight. In the competition, the rocket must zero any angular rotation, then complete two rotations and come to a stop. The blades did not successfully deploy at the test flight. Also, due to a electronics failure, no gyroscopic data was recorded. The RRS has not had a successful competition launch before, so the team has set a more personal goal of successful blade deployment and control during flight. Before the USLI competition last year, the RRS s rocket was damaged beyond repair in a test flight. For the competition in Alabama this year, the team goal is to have the payload perform a successful roll and de-roll. The RRS has not yet had a successful launch at the USLI competition. The goal for the RRS in this year s competition is to have a numerical score in each category. 8.4 Budget Table 8-3 provides a summary of important sections, as well as our projected bottom lines. Appendix D contains the fully detailed budget. 74
75 Table 8-3: RRS Budget Summary Budget Summary Vehicle Design Team Expenses $1, Recovery Team Expenses $ Payload Team Expenses $ Travel Costs $2, Income $9, Total Expenditures $5, Total Budget $4, Timeline The RRS has updated the Gantt chart schedule that has been used for planning during NSL. The ordering process through RPI s School of Engineering Purchasing department took slightly longer than expected. Due to these delays, electronic parts were not received in time for the scheduled test flight date of February 25th and had to be pushed back to the following weekend. As before, the updated Gantt chart cannot be feasibly included in this report, and will be instead hosted Educational Engagement Exploring Engineering Day The RRS, along with many other STEM organizations on campus partnered up with the for the RPI chapter of Society of Women Engineers (SWE) to volunteer and run events for the annual Exploring Engineering Day that SWE organizes. Members of the RRS volunteered as Children's Group Chaperones for the event. As group chaperones for EED, the members escorted groups of students to their activities and helped the volunteers running the individual events by answering questions the students had, guiding them through their activity and the engineering design process. In total, SWE has approximated the total number of students that attended to be around 360 for both the morning and afternoon sessions combined. These students were divided into 8 groups, with RRS volunteers directly interacting with a total of 2 groups of around 30 students each, for a combined number of around 60 direct interactions with students around the 5th grade Operation Nest Egg As of the release of the FRR, this event has yet to happen, but is scheduled for the weekend of March 25th. For the event, the RRS will be leading a local Girl Scouts troupe through an engineering design challenge to design and build their own capsule to ensure the safety of an egg that will be dropped from an overlook that is a flight of stairs above ground level. The RRS and the Girl Scouts troupe expect for around 20 students to participate in the event. 75

76 Appendix A: Milestone Review Sheet 76
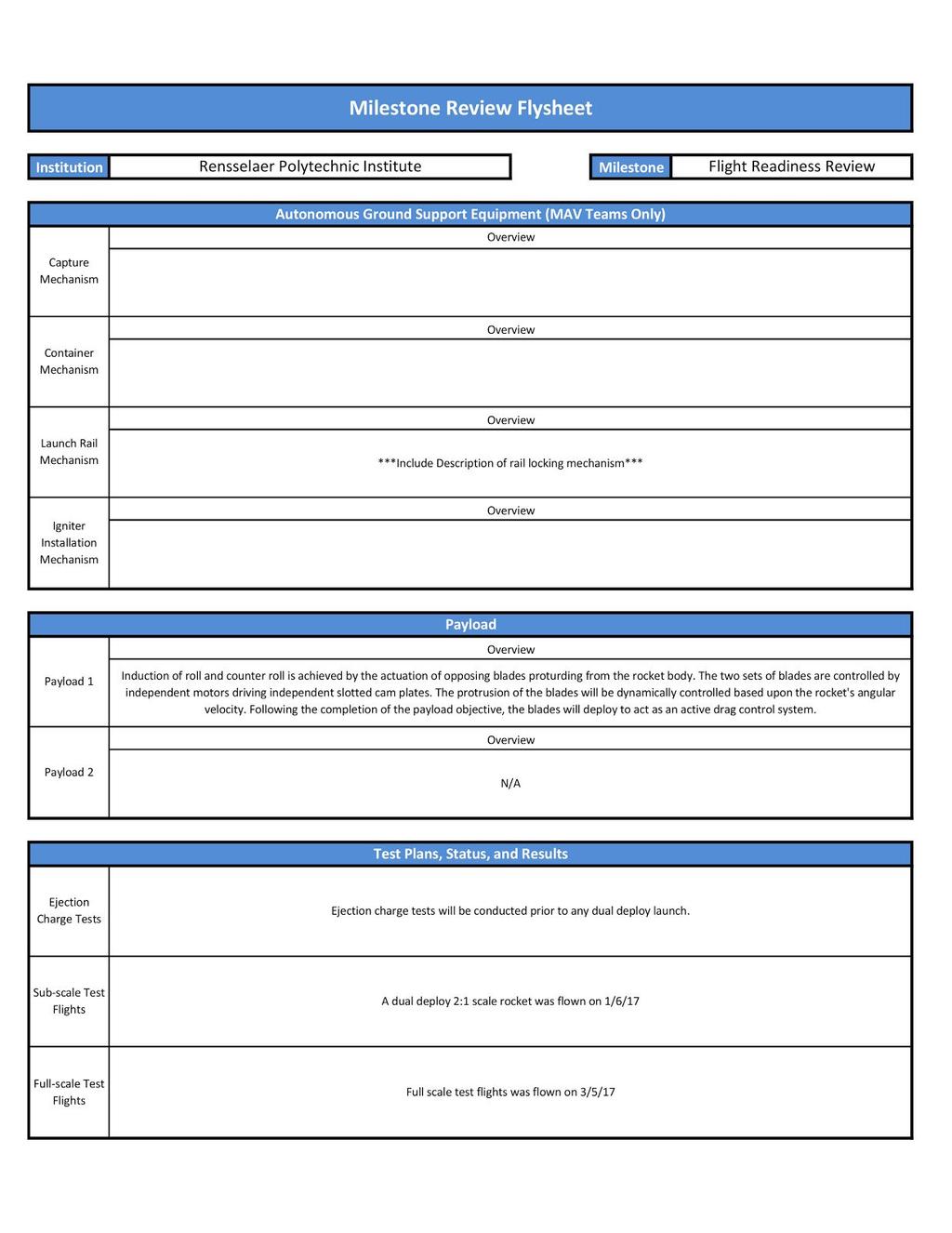
77 77
78 78
79 Appendix B: Vehicle Design Assembly Drawings 79
80 80
81 81
82 82
83 83

84 Appendix C: B2-Rocketry Parachute Packing Guide 84
CRITICAL DESIGN REVIEW. University of South Florida Society of Aeronautics and Rocketry
 CRITICAL DESIGN REVIEW University of South Florida Society of Aeronautics and Rocketry 2017-2018 AGENDA 1. Launch Vehicle 2. Recovery 3. Testing 4. Subscale Vehicle 5. Payload 6. Educational Outreach 7.
CRITICAL DESIGN REVIEW University of South Florida Society of Aeronautics and Rocketry 2017-2018 AGENDA 1. Launch Vehicle 2. Recovery 3. Testing 4. Subscale Vehicle 5. Payload 6. Educational Outreach 7.
Presentation Outline. # Title # Title
 CDR Presentation 1 Presentation Outline # Title # Title 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 Team Introduction Vehicle Overview Vehicle Dimensions Upper Body Section Payload
CDR Presentation 1 Presentation Outline # Title # Title 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 Team Introduction Vehicle Overview Vehicle Dimensions Upper Body Section Payload
Critical Design Review
 Critical Design Review University of Illinois at Urbana-Champaign NASA Student Launch 2017-2018 Illinois Space Society 1 Overview Illinois Space Society 2 Launch Vehicle Summary Javier Brown Illinois Space
Critical Design Review University of Illinois at Urbana-Champaign NASA Student Launch 2017-2018 Illinois Space Society 1 Overview Illinois Space Society 2 Launch Vehicle Summary Javier Brown Illinois Space
FLIGHT READINESS REVIEW TEAM OPTICS
 FLIGHT READINESS REVIEW TEAM OPTICS LAUNCH VEHICLE AND PAYLOAD DESIGN AND DIMENSIONS Vehicle Diameter 4 Upper Airframe Length 40 Lower Airframe Length 46 Coupler Band Length 1.5 Coupler Length 12 Nose
FLIGHT READINESS REVIEW TEAM OPTICS LAUNCH VEHICLE AND PAYLOAD DESIGN AND DIMENSIONS Vehicle Diameter 4 Upper Airframe Length 40 Lower Airframe Length 46 Coupler Band Length 1.5 Coupler Length 12 Nose
Presentation Outline. # Title
 FRR Presentation 1 Presentation Outline # Title 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 Team Introduction Mission Summary Vehicle Overview Vehicle Dimensions Upper Body Section Elliptical
FRR Presentation 1 Presentation Outline # Title 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 Team Introduction Mission Summary Vehicle Overview Vehicle Dimensions Upper Body Section Elliptical
Illinois Space Society Flight Readiness Review. University of Illinois Urbana-Champaign NASA Student Launch March 30, 2016
 Illinois Space Society Flight Readiness Review University of Illinois Urbana-Champaign NASA Student Launch 2015-2016 March 30, 2016 Team Managers Project Manager: Ian Charter Structures and Recovery Manager:
Illinois Space Society Flight Readiness Review University of Illinois Urbana-Champaign NASA Student Launch 2015-2016 March 30, 2016 Team Managers Project Manager: Ian Charter Structures and Recovery Manager:
NASA USLI PRELIMINARY DESIGN REVIEW. University of California, Davis SpaceED Rockets Team
 NASA USLI 2012-13 PRELIMINARY DESIGN REVIEW University of California, Davis SpaceED Rockets Team OUTLINE School Information Launch Vehicle Summary Motor Selection Mission Performance and Predictions Structures
NASA USLI 2012-13 PRELIMINARY DESIGN REVIEW University of California, Davis SpaceED Rockets Team OUTLINE School Information Launch Vehicle Summary Motor Selection Mission Performance and Predictions Structures
Jordan High School Rocketry Team. A Roll Stabilized Video Platform and Inflatable Location Device
 Jordan High School Rocketry Team A Roll Stabilized Video Platform and Inflatable Location Device Mission Success Criteria No damage done to any person or property. The recovery system deploys as expected.
Jordan High School Rocketry Team A Roll Stabilized Video Platform and Inflatable Location Device Mission Success Criteria No damage done to any person or property. The recovery system deploys as expected.
Auburn University. Project Wall-Eagle FRR
 Auburn University Project Wall-Eagle FRR Rocket Design Rocket Model Mass Estimates Booster Section Mass(lb.) Estimated Upper Section Mass(lb.) Actual Component Mass(lb.) Estimated Mass(lb.) Actual Component
Auburn University Project Wall-Eagle FRR Rocket Design Rocket Model Mass Estimates Booster Section Mass(lb.) Estimated Upper Section Mass(lb.) Actual Component Mass(lb.) Estimated Mass(lb.) Actual Component
CRITICAL DESIGN PRESENTATION
 CRITICAL DESIGN PRESENTATION UNIVERSITY OF SOUTH ALABAMA LAUNCH SOCIETY BILL BROWN, BEECHER FAUST, ROCKWELL GARRIDO, CARSON SCHAFF, MICHAEL WIESNETH, MATTHEW WOJCIECHOWSKI ADVISOR: CARLOS MONTALVO MENTOR:
CRITICAL DESIGN PRESENTATION UNIVERSITY OF SOUTH ALABAMA LAUNCH SOCIETY BILL BROWN, BEECHER FAUST, ROCKWELL GARRIDO, CARSON SCHAFF, MICHAEL WIESNETH, MATTHEW WOJCIECHOWSKI ADVISOR: CARLOS MONTALVO MENTOR:
Flight Readiness Review Addendum: Full-Scale Re-Flight. Roll Induction and Counter Roll NASA University Student Launch.
 Flight Readiness Review Addendum: Full-Scale Re-Flight Roll Induction and Counter Roll 2016-2017 NASA University Student Launch 27 March 2017 Propulsion Research Center, 301 Sparkman Dr. NW, Huntsville
Flight Readiness Review Addendum: Full-Scale Re-Flight Roll Induction and Counter Roll 2016-2017 NASA University Student Launch 27 March 2017 Propulsion Research Center, 301 Sparkman Dr. NW, Huntsville
Tacho Lycos 2017 NASA Student Launch Flight Readiness Review
 Tacho Lycos 2017 NASA Student Launch Flight Readiness Review High-Powered Rocketry Team 911 Oval Drive Raleigh NC, 27695 March 6, 2017 Table of Contents Table of Figures... 9 Table of Appendices... 11
Tacho Lycos 2017 NASA Student Launch Flight Readiness Review High-Powered Rocketry Team 911 Oval Drive Raleigh NC, 27695 March 6, 2017 Table of Contents Table of Figures... 9 Table of Appendices... 11
NASA SL - NU FRONTIERS. PDR presentation to the NASA Student Launch Review Panel
 NASA SL - NU FRONTIERS PDR presentation to the NASA Student Launch Review Panel 1 Agenda Launch Vehicle Overview Nose Cone Section Payload Section Lower Avionic Bay Section Booster Section Motor Selection
NASA SL - NU FRONTIERS PDR presentation to the NASA Student Launch Review Panel 1 Agenda Launch Vehicle Overview Nose Cone Section Payload Section Lower Avionic Bay Section Booster Section Motor Selection
Georgia Tech NASA Critical Design Review Teleconference Presented By: Georgia Tech Team ARES
 Georgia Tech NASA Critical Design Review Teleconference Presented By: Georgia Tech Team ARES 1 Agenda 1. Team Overview (1 Min) 2. 3. 4. 5. 6. 7. Changes Since Proposal (1 Min) Educational Outreach (1 Min)
Georgia Tech NASA Critical Design Review Teleconference Presented By: Georgia Tech Team ARES 1 Agenda 1. Team Overview (1 Min) 2. 3. 4. 5. 6. 7. Changes Since Proposal (1 Min) Educational Outreach (1 Min)
NASA - USLI Presentation 1/23/2013. University of Minnesota: USLI CDR 1
 NASA - USLI Presentation 1/23/2013 2013 USLI CDR 1 Final design Key features Final motor choice Flight profile Stability Mass Drift Parachute Kinetic Energy Staged recovery Payload Integration Interface
NASA - USLI Presentation 1/23/2013 2013 USLI CDR 1 Final design Key features Final motor choice Flight profile Stability Mass Drift Parachute Kinetic Energy Staged recovery Payload Integration Interface
LEVEL 3 BUILD YELLOW BIRD. Dan Schwartz
 LEVEL 3 BUILD YELLOW BIRD Dan Schwartz This entire rocket is built using the same techniques I use for my nose cones, a central airframe tube for compression strength and rings of high compression styrofoam
LEVEL 3 BUILD YELLOW BIRD Dan Schwartz This entire rocket is built using the same techniques I use for my nose cones, a central airframe tube for compression strength and rings of high compression styrofoam
Flight Readiness Review
 Flight Readiness Review University of Illinois at Urbana-Champaign NASA Student Launch 2017-2018 Illinois Space Society 1 Overview Illinois Space Society 2 Launch Vehicle Summary Javier Brown Illinois
Flight Readiness Review University of Illinois at Urbana-Champaign NASA Student Launch 2017-2018 Illinois Space Society 1 Overview Illinois Space Society 2 Launch Vehicle Summary Javier Brown Illinois
GIT LIT NASA STUDENT LAUNCH PRELIMINARY DESIGN REVIEW NOVEMBER 13TH, 2017
 GIT LIT 07-08 NASA STUDENT LAUNCH PRELIMINARY DESIGN REVIEW NOVEMBER TH, 07 AGENDA. Team Overview (5 Min). Educational Outreach ( Min). Safety ( Min) 4. Project Budget ( Min) 5. Launch Vehicle (0 min)
GIT LIT 07-08 NASA STUDENT LAUNCH PRELIMINARY DESIGN REVIEW NOVEMBER TH, 07 AGENDA. Team Overview (5 Min). Educational Outreach ( Min). Safety ( Min) 4. Project Budget ( Min) 5. Launch Vehicle (0 min)
PRELIMINARY DESIGN REVIEW
 PRELIMINARY DESIGN REVIEW 1 1 Team Structure - Team Leader: Michael Blackwood NAR #101098L2 Certified - Safety Officer: Jay Nagy - Team Mentor: Art Upton NAR #26255L3 Certified - NAR Section: Jackson Model
PRELIMINARY DESIGN REVIEW 1 1 Team Structure - Team Leader: Michael Blackwood NAR #101098L2 Certified - Safety Officer: Jay Nagy - Team Mentor: Art Upton NAR #26255L3 Certified - NAR Section: Jackson Model
Auburn University Student Launch. PDR Presentation November 16, 2015
 Auburn University Student Launch PDR Presentation November 16, 2015 Project Aquila Vehicle Dimensions Total Length of 69.125 inches Inner Diameter of 5 inches Outer Diameter of 5.25 inches Estimated mass
Auburn University Student Launch PDR Presentation November 16, 2015 Project Aquila Vehicle Dimensions Total Length of 69.125 inches Inner Diameter of 5 inches Outer Diameter of 5.25 inches Estimated mass
Critical Design Review Report
 Critical Design Review Report I) Summary of PDR report Team Name: The Rocket Men Mailing Address: Spring Grove Area High School 1490 Roth s Church Road Spring Grove, PA 17362 Mentor: Tom Aument NAR Number
Critical Design Review Report I) Summary of PDR report Team Name: The Rocket Men Mailing Address: Spring Grove Area High School 1490 Roth s Church Road Spring Grove, PA 17362 Mentor: Tom Aument NAR Number
University Student Launch Initiative
 University Student Launch Initiative HARDING UNIVERSITY Flight Readiness Review March 31, 2008 Launch Vehicle Summary Size: 97.7 (2.5 meters long), 3.1 diameter Motor: Contrail Rockets 54mm J-234 Recovery
University Student Launch Initiative HARDING UNIVERSITY Flight Readiness Review March 31, 2008 Launch Vehicle Summary Size: 97.7 (2.5 meters long), 3.1 diameter Motor: Contrail Rockets 54mm J-234 Recovery
Team Air Mail Preliminary Design Review
 Team Air Mail Preliminary Design Review 2014-2015 Space Grant Midwest High-Power Rocket Competition UAH Space Hardware Club Huntsville, AL Top: Will Hill, Davis Hunter, Beth Dutour, Bradley Henderson,
Team Air Mail Preliminary Design Review 2014-2015 Space Grant Midwest High-Power Rocket Competition UAH Space Hardware Club Huntsville, AL Top: Will Hill, Davis Hunter, Beth Dutour, Bradley Henderson,
Tacho Lycos 2017 NASA Student Launch Critical Design Review
 Tacho Lycos 2017 NASA Student Launch Critical Design Review High-Powered Rocketry Team 911 Oval Drive Raleigh NC, 27695 January 13, 2017 Table of Contents Table of Figures:... 8 Table of Appendices:...
Tacho Lycos 2017 NASA Student Launch Critical Design Review High-Powered Rocketry Team 911 Oval Drive Raleigh NC, 27695 January 13, 2017 Table of Contents Table of Figures:... 8 Table of Appendices:...
UC Berkeley Space Technologies and Rocketry Preliminary Design Review Presentation. Access Control: CalSTAR Public Access
 UC Berkeley Space Technologies and Rocketry Preliminary Design Review Presentation Access Control: CalSTAR Public Access Agenda Airframe Propulsion Payload Recovery Safety Outreach Project Plan Airframe
UC Berkeley Space Technologies and Rocketry Preliminary Design Review Presentation Access Control: CalSTAR Public Access Agenda Airframe Propulsion Payload Recovery Safety Outreach Project Plan Airframe
NASA s Student Launch Initiative :
 NASA s Student Launch Initiative : Critical Design Review Payload: Fragile Material Protection 1 Agenda 1. Design Overview 2. Payload 3. Recovery 4. 5. I. Sub-Scale Predictions II. Sub-Scale Test III.
NASA s Student Launch Initiative : Critical Design Review Payload: Fragile Material Protection 1 Agenda 1. Design Overview 2. Payload 3. Recovery 4. 5. I. Sub-Scale Predictions II. Sub-Scale Test III.
Presentation 3 Vehicle Systems - Phoenix
 Presentation 3 Vehicle Systems - Phoenix 1 Outline Structures Nosecone Body tubes Bulkheads Fins Tailcone Recovery System Layout Testing Propulsion Ox Tank Plumbing Injector Chamber Nozzle Testing Hydrostatic
Presentation 3 Vehicle Systems - Phoenix 1 Outline Structures Nosecone Body tubes Bulkheads Fins Tailcone Recovery System Layout Testing Propulsion Ox Tank Plumbing Injector Chamber Nozzle Testing Hydrostatic
University of Notre Dame
 University of Notre Dame 2016-2017 Notre Dame Rocketry Team Critical Design Review NASA Student Launch Competition Roll Control and Fragile Object Protection Payloads Submitted January 13, 2017 365 Fitzpatrick
University of Notre Dame 2016-2017 Notre Dame Rocketry Team Critical Design Review NASA Student Launch Competition Roll Control and Fragile Object Protection Payloads Submitted January 13, 2017 365 Fitzpatrick
Tripoli Rocketry Association Level 3 Certification Attempt
 Tripoli Rocketry Association Level 3 Certification Attempt Kevin O Classen 1101 Dutton Brook Road Goshen, VT 05733 (802) 247-4205 kevin@back2bed.com Doctor Fill Doctor Fill General Specifications Airframe:
Tripoli Rocketry Association Level 3 Certification Attempt Kevin O Classen 1101 Dutton Brook Road Goshen, VT 05733 (802) 247-4205 kevin@back2bed.com Doctor Fill Doctor Fill General Specifications Airframe:
NASA SL Critical Design Review
 NASA SL Critical Design Review University of Alabama in Huntsville 1 LAUNCH VEHICLE 2 Vehicle Summary Launch Vehicle Dimensions Fairing Diameter: 6 in. Body Tube Diameter: 4 in. Mass at lift off: 43.8
NASA SL Critical Design Review University of Alabama in Huntsville 1 LAUNCH VEHICLE 2 Vehicle Summary Launch Vehicle Dimensions Fairing Diameter: 6 in. Body Tube Diameter: 4 in. Mass at lift off: 43.8
Pegasus II. Tripoli Level 3 Project Documentation. Brian Wheeler
 Pegasus II Tripoli Level 3 Project Documentation Brian Wheeler Contents: A. Design Overview B. Booster Construction C. Electronics Bay (Mechanical) Construction D. Nose Cone Construction E. Recovery System
Pegasus II Tripoli Level 3 Project Documentation Brian Wheeler Contents: A. Design Overview B. Booster Construction C. Electronics Bay (Mechanical) Construction D. Nose Cone Construction E. Recovery System
The University of Toledo
 The University of Toledo Project Kronos Preliminary Design Review 11/03/2017 University of Toledo UT Rocketry Club 2801 W Bancroft St. MS 105 Toledo, OH 43606 Contents 1 Summary of Proposal... 6 1.1 Team
The University of Toledo Project Kronos Preliminary Design Review 11/03/2017 University of Toledo UT Rocketry Club 2801 W Bancroft St. MS 105 Toledo, OH 43606 Contents 1 Summary of Proposal... 6 1.1 Team
Flight Readiness Review March 16, Agenda. California State Polytechnic University, Pomona W. Temple Ave, Pomona, CA 91768
 Flight Readiness Review March 16, 2018 Agenda California State Polytechnic University, Pomona 3801 W. Temple Ave, Pomona, CA 91768 Agenda 1.0 Changes made Since CDR 2.0 Launch Vehicle Criteria 3.0 Mission
Flight Readiness Review March 16, 2018 Agenda California State Polytechnic University, Pomona 3801 W. Temple Ave, Pomona, CA 91768 Agenda 1.0 Changes made Since CDR 2.0 Launch Vehicle Criteria 3.0 Mission
Notre Dame Rocketry Team. Flight Readiness Review March 8, :00 PM CST
 Notre Dame Rocketry Team Flight Readiness Review March 8, 2018 2:00 PM CST Contents Overview Vehicle Design Recovery Subsystem Experimental Payloads Deployable Rover Payload Air Braking System Safety and
Notre Dame Rocketry Team Flight Readiness Review March 8, 2018 2:00 PM CST Contents Overview Vehicle Design Recovery Subsystem Experimental Payloads Deployable Rover Payload Air Braking System Safety and
University Student Launch Initiative
 University Student Launch Initiative HARDING UNIVERSITY Critical Design Review February 4, 2008 The Team Dr. Edmond Wilson Brett Keller Team Official Project Leader, Safety Officer Professor of Chemistry
University Student Launch Initiative HARDING UNIVERSITY Critical Design Review February 4, 2008 The Team Dr. Edmond Wilson Brett Keller Team Official Project Leader, Safety Officer Professor of Chemistry
University of Illinois at Urbana-Champaign Illinois Space Society Student Launch Preliminary Design Review November 3, 2017
 University of Illinois at Urbana-Champaign Illinois Space Society Student Launch 2017-2018 Preliminary Design Review November 3, 2017 Illinois Space Society 104 S. Wright Street Room 18C Urbana, Illinois
University of Illinois at Urbana-Champaign Illinois Space Society Student Launch 2017-2018 Preliminary Design Review November 3, 2017 Illinois Space Society 104 S. Wright Street Room 18C Urbana, Illinois
Statement of Work Requirements Verification Table - Addendum
 Statement of Work Requirements Verification Table - Addendum Vehicle Requirements Requirement Success Criteria Verification 1.1 No specific design requirement exists for the altitude. The altitude is a
Statement of Work Requirements Verification Table - Addendum Vehicle Requirements Requirement Success Criteria Verification 1.1 No specific design requirement exists for the altitude. The altitude is a
PROJECT AQUILA 211 ENGINEERING DRIVE AUBURN, AL POST LAUNCH ASSESSMENT REVIEW
 PROJECT AQUILA 211 ENGINEERING DRIVE AUBURN, AL 36849 POST LAUNCH ASSESSMENT REVIEW APRIL 29, 2016 Motor Specifications The team originally planned to use an Aerotech L-1520T motor and attempted four full
PROJECT AQUILA 211 ENGINEERING DRIVE AUBURN, AL 36849 POST LAUNCH ASSESSMENT REVIEW APRIL 29, 2016 Motor Specifications The team originally planned to use an Aerotech L-1520T motor and attempted four full
NUMAV. AIAA at Northeastern University
 NUMAV AIAA at Northeastern University Team Officials Andrew Buggee, President, Northeastern AIAA chapter Dr. Andrew Goldstone, Faculty Advisor John Hume, Safety Officer Rob DeHate, Team Mentor Team Roster
NUMAV AIAA at Northeastern University Team Officials Andrew Buggee, President, Northeastern AIAA chapter Dr. Andrew Goldstone, Faculty Advisor John Hume, Safety Officer Rob DeHate, Team Mentor Team Roster
NORTHEASTERN UNIVERSITY
 NORTHEASTERN UNIVERSITY POST-LAUNCH ASSESSMENT REVIEW NORTHEASTERN UNIVERSITY USLI TEAM APRIL 27TH 2018 Table of Contents 1. Summary 2 1.1 Team Summary 2 1.2 Launch Summary 2 2. Launch Vehicle Assessment
NORTHEASTERN UNIVERSITY POST-LAUNCH ASSESSMENT REVIEW NORTHEASTERN UNIVERSITY USLI TEAM APRIL 27TH 2018 Table of Contents 1. Summary 2 1.1 Team Summary 2 1.2 Launch Summary 2 2. Launch Vehicle Assessment
Skill Level 3 Average Skills Needed. Made In USA. Kit #04997 Skill Level 4. Zephyr Parts List
 Kit #04997 Skill Level 4 Made In USA Zephyr Parts List Item # Item Name Qty 10137 Engine Mount Tube (AT-38/11) 1 10218 Airframe Body Tube (AT-98/18) 4" Thick Wall 1 10219 Airframe Body Tube (AT-98/18)
Kit #04997 Skill Level 4 Made In USA Zephyr Parts List Item # Item Name Qty 10137 Engine Mount Tube (AT-38/11) 1 10218 Airframe Body Tube (AT-98/18) 4" Thick Wall 1 10219 Airframe Body Tube (AT-98/18)
Student Launch. Enclosed: Preliminary Design Review. Submitted by: Rocket Team Project Lead: David Eilken
 University of Evansville Student Launch Enclosed: Preliminary Design Review Submitted by: 2016 2017 Rocket Team Project Lead: David Eilken Submission Date: November 04, 2016 Payload: Fragile Material Protection
University of Evansville Student Launch Enclosed: Preliminary Design Review Submitted by: 2016 2017 Rocket Team Project Lead: David Eilken Submission Date: November 04, 2016 Payload: Fragile Material Protection
Preliminary Design Review. Cyclone Student Launch Initiative
 Preliminary Design Review Cyclone Student Launch Initiative Overview Team Overview Mission Statement Vehicle Overview Avionics Overview Safety Overview Payload Overview Requirements Compliance Plan Team
Preliminary Design Review Cyclone Student Launch Initiative Overview Team Overview Mission Statement Vehicle Overview Avionics Overview Safety Overview Payload Overview Requirements Compliance Plan Team
Overview. Mission Overview Payload and Subsystems Rocket and Subsystems Management
 MIT ROCKET TEAM Overview Mission Overview Payload and Subsystems Rocket and Subsystems Management Purpose and Mission Statement Our Mission: Use a rocket to rapidly deploy a UAV capable of completing search
MIT ROCKET TEAM Overview Mission Overview Payload and Subsystems Rocket and Subsystems Management Purpose and Mission Statement Our Mission: Use a rocket to rapidly deploy a UAV capable of completing search
Project NOVA
 Project NOVA 2017-2018 Our Mission Design a Rocket Capable of: Apogee of 5280 ft Deploying an autonomous Rover Vehicle REILLY B. Vehicle Dimensions Total Length of 108 inches Inner Diameter of 6 inches
Project NOVA 2017-2018 Our Mission Design a Rocket Capable of: Apogee of 5280 ft Deploying an autonomous Rover Vehicle REILLY B. Vehicle Dimensions Total Length of 108 inches Inner Diameter of 6 inches
Wichita State Launch Project K.I.S.S.
 Wichita State Launch Project K.I.S.S. Benjamin Russell Jublain Wohler Mohamed Moustafa Tarun Bandemagala Outline 1. 2. 3. 4. 5. 6. 7. Introduction Vehicle Overview Mission Predictions Payload Design Requirement
Wichita State Launch Project K.I.S.S. Benjamin Russell Jublain Wohler Mohamed Moustafa Tarun Bandemagala Outline 1. 2. 3. 4. 5. 6. 7. Introduction Vehicle Overview Mission Predictions Payload Design Requirement
NASA Student Launch College and University. Preliminary Design Review
 2017-2018 NASA Student Launch College and University Preliminary Design Review Institution: United States Naval Academy Mailing Address: Aerospace Engineering Department United States Naval Academy ATTN:
2017-2018 NASA Student Launch College and University Preliminary Design Review Institution: United States Naval Academy Mailing Address: Aerospace Engineering Department United States Naval Academy ATTN:
NASA SL Flight Readiness Review
 NASA SL Flight Readiness Review University of Alabama in Huntsville 1 LAUNCH VEHICLE 2 Vehicle Overview Vehicle Dimensions Diameter: 6 fairing/4 aft Length: 106 inches Wet Mass: 41.1 lbs. Center of Pressure:
NASA SL Flight Readiness Review University of Alabama in Huntsville 1 LAUNCH VEHICLE 2 Vehicle Overview Vehicle Dimensions Diameter: 6 fairing/4 aft Length: 106 inches Wet Mass: 41.1 lbs. Center of Pressure:
Illinois Space Society University of Illinois Urbana Champaign Student Launch Maxi-MAV Preliminary Design Review November 5, 2014
 Illinois Space Society University of Illinois Urbana Champaign Student Launch 2014-2015 Maxi-MAV Preliminary Design Review November 5, 2014 Illinois Space Society 104 S. Wright Street Room 321D Urbana,
Illinois Space Society University of Illinois Urbana Champaign Student Launch 2014-2015 Maxi-MAV Preliminary Design Review November 5, 2014 Illinois Space Society 104 S. Wright Street Room 321D Urbana,
CNY Rocket Team Challenge. Basics of Using RockSim 9 to Predict Altitude for the Central New York Rocket Team Challenge
 CNY Rocket Team Challenge Basics of Using RockSim 9 to Predict Altitude for the Central New York Rocket Team Challenge RockSim 9 Basics 2 Table of Contents A. Introduction.p. 3 B. Designing Your Rocket.p.
CNY Rocket Team Challenge Basics of Using RockSim 9 to Predict Altitude for the Central New York Rocket Team Challenge RockSim 9 Basics 2 Table of Contents A. Introduction.p. 3 B. Designing Your Rocket.p.
Preliminary Design Review. California State University, Long Beach USLI November 13th, 2017
 Preliminary Design Review California State University, Long Beach USLI November 13th, 2017 System Overview Launch Vehicle Dimensions Total Length 108in Airframe OD 6.17in. ID 6.00in. Couplers OD 5.998in.
Preliminary Design Review California State University, Long Beach USLI November 13th, 2017 System Overview Launch Vehicle Dimensions Total Length 108in Airframe OD 6.17in. ID 6.00in. Couplers OD 5.998in.
Strap-on Booster Pods
 Strap-on Booster Pods Strap-On Booster Parts List Kit #17052 P/N Description Qty 10105 AT-24/12 Slotted (Laser Cut) Tube 2 10068 Engine Mount (AT-18/2.75) Tube 2 13029 CR 13/18 2 13031 CR 18/24 4 14352
Strap-on Booster Pods Strap-On Booster Parts List Kit #17052 P/N Description Qty 10105 AT-24/12 Slotted (Laser Cut) Tube 2 10068 Engine Mount (AT-18/2.75) Tube 2 13029 CR 13/18 2 13031 CR 18/24 4 14352
USLI Flight Readiness Review
 UNIVERSITY OF MINNESOTA TWIN CITIES 2011 2012 USLI Flight Readiness Review University Of Minnesota Team Artemis 3/26/2012 Flight Readiness Report prepared by University of Minnesota Team Artemis for 2011-2012
UNIVERSITY OF MINNESOTA TWIN CITIES 2011 2012 USLI Flight Readiness Review University Of Minnesota Team Artemis 3/26/2012 Flight Readiness Report prepared by University of Minnesota Team Artemis for 2011-2012
USLI Critical Design Report
 UNIVERSITY OF MINNESOTA TWIN CITIES 2011 2012 USLI Critical Design Report University Of Minnesota Team Artemis 1/23/2012 Critical Design Report by University of Minnesota Team Artemis for 2011-2012 NASA
UNIVERSITY OF MINNESOTA TWIN CITIES 2011 2012 USLI Critical Design Report University Of Minnesota Team Artemis 1/23/2012 Critical Design Report by University of Minnesota Team Artemis for 2011-2012 NASA
HPR Staging & Air Starting By Gary Stroick
 Complex Rocket Design Considerations HPR Staging & Air Starting By Gary Stroick 1. Tripoli Safety Code 2. Technical Considerations 3. Clusters/Air Starts 4. Staging 5. Summary 2 1. Complex High Power Rocket.
Complex Rocket Design Considerations HPR Staging & Air Starting By Gary Stroick 1. Tripoli Safety Code 2. Technical Considerations 3. Clusters/Air Starts 4. Staging 5. Summary 2 1. Complex High Power Rocket.
The University of Toledo
 The University of Toledo Project Cairo Preliminary Design Review 10/08/2016 University of Toledo UT Rocketry Club 2801 W Bancroft St. MS 105 Toledo, OH 43606 Contents 1 Summary of Preliminary Design Review...
The University of Toledo Project Cairo Preliminary Design Review 10/08/2016 University of Toledo UT Rocketry Club 2801 W Bancroft St. MS 105 Toledo, OH 43606 Contents 1 Summary of Preliminary Design Review...
Northwest Indian College Space Center USLI Critical Design Review
 2012-2013 Northwest Indian College Space Center USLI Critical Design Review Table of Contents, Tables, and Figures I.0 CDR Report Summary... 1 I.1 Team Summary... 1 I.2 Launch Vehicle Summary... 1 I.2a
2012-2013 Northwest Indian College Space Center USLI Critical Design Review Table of Contents, Tables, and Figures I.0 CDR Report Summary... 1 I.1 Team Summary... 1 I.2 Launch Vehicle Summary... 1 I.2a
ADVANCED MODEL ROCKET
 Division of RCS Rocket Components, Inc. Assembly and Operation Instructions BEFORE YOU BEGIN: ADVANCED MODEL ROCKET COMPLETED INITIATOR ADVANCED MODEL ROCKET 19911-8091 Rev. 8/12/04 Study the illustrations
Division of RCS Rocket Components, Inc. Assembly and Operation Instructions BEFORE YOU BEGIN: ADVANCED MODEL ROCKET COMPLETED INITIATOR ADVANCED MODEL ROCKET 19911-8091 Rev. 8/12/04 Study the illustrations
1:6 BLACK BRANT II. c o s m o d r o m e r o c k e t r y
 c o s m o d r o m e r o c k e t r y 1:6 BLACK BRANT II This kit is capable of use with high thrust motors. It is therefore strongly recommended that epoxy be used throughout the construction of this kit.
c o s m o d r o m e r o c k e t r y 1:6 BLACK BRANT II This kit is capable of use with high thrust motors. It is therefore strongly recommended that epoxy be used throughout the construction of this kit.
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Aeronautics and Astronautics
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Aeronautics and Astronautics 16.00 Introduction to Aerospace and Design Problem Set #4 Issued: February 28, 2002 Due: March 19, 2002 ROCKET PERFORMANCE
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Aeronautics and Astronautics 16.00 Introduction to Aerospace and Design Problem Set #4 Issued: February 28, 2002 Due: March 19, 2002 ROCKET PERFORMANCE
Pre-Flight Checklist for SLIPSTICK III
 Advanced Planning 1 Schedule a Check that waivers are available at the intended launch site and date. b Check weather forecast for wind and temperature conditions at the site. c Have TAP members approved
Advanced Planning 1 Schedule a Check that waivers are available at the intended launch site and date. b Check weather forecast for wind and temperature conditions at the site. c Have TAP members approved
NASA Student Launch W. Foothill Blvd. Glendora, CA Artemis. Deployable Rover. November 3rd, Preliminary Design Review
 2017 2018 NASA Student Launch Preliminary Design Review 1000 W. Foothill Blvd. Glendora, CA 91741 Artemis Deployable Rover November 3rd, 2017 Table of Contents General Information... 9 1. School Information...
2017 2018 NASA Student Launch Preliminary Design Review 1000 W. Foothill Blvd. Glendora, CA 91741 Artemis Deployable Rover November 3rd, 2017 Table of Contents General Information... 9 1. School Information...
AUBURN UNIVERSITY STUDENT LAUNCH PROJECT NOVA II. 211 Davis Hall AUBURN, AL CDR
 AUBURN UNIVERSITY STUDENT LAUNCH PROJECT NOVA II 211 Davis Hall AUBURN, AL 36849 CDR January 10, 2019 Contents List of Tables...7 List of Figures...9 1 CDR Report Summary...12 1.1 Payload Deployable Rover...12
AUBURN UNIVERSITY STUDENT LAUNCH PROJECT NOVA II 211 Davis Hall AUBURN, AL 36849 CDR January 10, 2019 Contents List of Tables...7 List of Figures...9 1 CDR Report Summary...12 1.1 Payload Deployable Rover...12
COMPLETED SUMO LEVEL 1 MODEL ROCKET ADVANCED HIGH POWER MODEL ROCKET ASSEMBLY AND OPERATION INSTRUCTIONS BEFORE YOU BEGIN:
 COMPLETED SUMO LEVEL 1 MODEL ROCKET ADVANCED HIGH POWER MODEL ROCKET ASSEMBLY AND OPERATION INSTRUCTIONS BEFORE YOU BEGIN: Study the illustrations and sequence of assembly. The sequence of assembly is
COMPLETED SUMO LEVEL 1 MODEL ROCKET ADVANCED HIGH POWER MODEL ROCKET ASSEMBLY AND OPERATION INSTRUCTIONS BEFORE YOU BEGIN: Study the illustrations and sequence of assembly. The sequence of assembly is
SpaceLoft XL Sub-Orbital Launch Vehicle
 SpaceLoft XL Sub-Orbital Launch Vehicle The SpaceLoft XL is UP Aerospace s workhorse space launch vehicle -- ideal for significant-size payloads and multiple, simultaneous-customer operations. SpaceLoft
SpaceLoft XL Sub-Orbital Launch Vehicle The SpaceLoft XL is UP Aerospace s workhorse space launch vehicle -- ideal for significant-size payloads and multiple, simultaneous-customer operations. SpaceLoft
ADVANCED MODEL ROCKET
 ADVANCED MODEL ROCKET Assembly and Operation Instructions Division of RCS Rocket Components, Inc. BEFORE YOU BEGIN: COMPLETED BARRACUDA ADVANCED MODEL ROCKET 19920-3092 Rev. 8/12/04 Study the illustrations
ADVANCED MODEL ROCKET Assembly and Operation Instructions Division of RCS Rocket Components, Inc. BEFORE YOU BEGIN: COMPLETED BARRACUDA ADVANCED MODEL ROCKET 19920-3092 Rev. 8/12/04 Study the illustrations
COMPLETED MIRAGE ADVANCED MODEL ROCKET
 Division of RCS Rocket Components, Inc. BEFORE YOU BEGIN: Study the illustrations and sequence of assembly. The sequence of assembly is important. Review the parts list and become familiar with all parts
Division of RCS Rocket Components, Inc. BEFORE YOU BEGIN: Study the illustrations and sequence of assembly. The sequence of assembly is important. Review the parts list and become familiar with all parts
Critical Design Review
 Critical Design Review 1/27/2017 NASA Student Launch Competition 2016-2017 California State Polytechnic University, Pomona 3801 W Temple Ave, Pomona, CA 91768 1/27/2017 California State Polytechnic University,
Critical Design Review 1/27/2017 NASA Student Launch Competition 2016-2017 California State Polytechnic University, Pomona 3801 W Temple Ave, Pomona, CA 91768 1/27/2017 California State Polytechnic University,
COMPLETED ASTROBEE D ADVANCED MODEL ROCKET
 Division of RCS Rocket Components, Inc. BEFORE YOU BEGIN: ADVANCED MODEL ROCKET Assembly and Operation Instructions Study the illustrations and sequence of assembly. The sequence of assembly is important.
Division of RCS Rocket Components, Inc. BEFORE YOU BEGIN: ADVANCED MODEL ROCKET Assembly and Operation Instructions Study the illustrations and sequence of assembly. The sequence of assembly is important.
Post Launch Assessment Review
 AIAA Orange County Section Student Launch Initiative 2011-2012 Post Launch Assessment Review Rocket Deployment of a Bendable Wing Micro-UAV for Data Collection Submitted by: AIAA Orange County Section
AIAA Orange County Section Student Launch Initiative 2011-2012 Post Launch Assessment Review Rocket Deployment of a Bendable Wing Micro-UAV for Data Collection Submitted by: AIAA Orange County Section
Close Proximity Recovery System
 CPR-MAX Close Proximity Recovery System Tired of the long walks associated with recovering high altitude rockets? So were we! That s why we developed the Close Proximity Recovery System (CPR). CPR uses
CPR-MAX Close Proximity Recovery System Tired of the long walks associated with recovering high altitude rockets? So were we! That s why we developed the Close Proximity Recovery System (CPR). CPR uses
Rocket Design. Tripoli Minnesota Gary Stroick. February 2010
 Rocket Design Tripoli Minnesota Gary Stroick February 2010 Purpose Focus is on designing aerodynamically stable rockets not drag optimization nor construction techniques! Copyright 2010 by Gary Stroick
Rocket Design Tripoli Minnesota Gary Stroick February 2010 Purpose Focus is on designing aerodynamically stable rockets not drag optimization nor construction techniques! Copyright 2010 by Gary Stroick
Florida A & M University. Flight Readiness Review. 11/19/2010 Preliminary Design Review
 Florida A & M University Flight Readiness Review 11/19/2010 Preliminary Design Review 1 Overview Team Summary ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ ~~~~~~~~ Vehicle Criteria ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ ~~~~~~~~
Florida A & M University Flight Readiness Review 11/19/2010 Preliminary Design Review 1 Overview Team Summary ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ ~~~~~~~~ Vehicle Criteria ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ ~~~~~~~~
ADVANCED MODEL ROCKET. Read And Follow All Instructions
 Division of RCS Rocket Components, Inc. Assembly and Operation Instructions BEFORE YOU BEGIN: ADVANCED MODEL ROCKET COMPLETED CHEETAH ADVANCED MODEL ROCKET 19916-3092 Rev. 8/12/04 Study the illustrations
Division of RCS Rocket Components, Inc. Assembly and Operation Instructions BEFORE YOU BEGIN: ADVANCED MODEL ROCKET COMPLETED CHEETAH ADVANCED MODEL ROCKET 19916-3092 Rev. 8/12/04 Study the illustrations
Northwest Indian College Space Center USLI Post Launch Assessment Review
 Northwest Indian College Space Center USLI Post Launch Assessment Review 2012-2013 Table of Contents I. Team Summary... 1 Team Name: Northwest Indian College RPGs... 1 II. Launch Vehicle Summary... 1
Northwest Indian College Space Center USLI Post Launch Assessment Review 2012-2013 Table of Contents I. Team Summary... 1 Team Name: Northwest Indian College RPGs... 1 II. Launch Vehicle Summary... 1
Critical Design Review Report NASA Student Launch Florida International University American Society of Mechanical Engineers (FIU-ASME)
") Critical Design Review Report 2014-2015 NASA Student Launch Florida International University American Society of Mechanical Engineers (FIU-ASME) Florida International University Engineering Center College
Critical Design Review Report 2014-2015 NASA Student Launch Florida International University American Society of Mechanical Engineers (FIU-ASME) Florida International University Engineering Center College
Cal Poly Pomona Rocketry NASA Student Launch Competition POST LAUNCH ASSESMENT REVIEW April 24, 2017
 Cal Poly Pomona Rocketry NASA Student Launch Competition 2016-2017 POST LAUNCH ASSESMENT REVIEW April 24, 2017 California State Polytechnic University, Pomona 3801 W Temple Ave, Pomona, CA 91768 Department
Cal Poly Pomona Rocketry NASA Student Launch Competition 2016-2017 POST LAUNCH ASSESMENT REVIEW April 24, 2017 California State Polytechnic University, Pomona 3801 W Temple Ave, Pomona, CA 91768 Department
Critical Design Review
 AIAA Orange County Section Student Launch Initiative 2011-2012 Critical Design Review Rocket Deployment of a Bendable Wing Micro-UAV for Data Collection Submitted by: AIAA Orange County Section NASA Student
AIAA Orange County Section Student Launch Initiative 2011-2012 Critical Design Review Rocket Deployment of a Bendable Wing Micro-UAV for Data Collection Submitted by: AIAA Orange County Section NASA Student
Critical Design Review
 Harding University University Student Launch Initiative Team Critical Design Review January 29, 2007 The Flying Bison Sarah Christensen Project Leader Dr. Ed Wilson Faculty Supervisor Dr. James Mackey
Harding University University Student Launch Initiative Team Critical Design Review January 29, 2007 The Flying Bison Sarah Christensen Project Leader Dr. Ed Wilson Faculty Supervisor Dr. James Mackey
Preliminary Detailed Design Review
 Preliminary Detailed Design Review Project Review Project Status Timekeeping and Setback Management Manufacturing techniques Drawing formats Design Features Phase Objectives Task Assignment Justification
Preliminary Detailed Design Review Project Review Project Status Timekeeping and Setback Management Manufacturing techniques Drawing formats Design Features Phase Objectives Task Assignment Justification
Bumble Bee. Please read and understand all instructions before building!
 Bumble Bee The Bumble Bee kit contains all the parts necessary* to build a flying high power rocket: (1) Pre-slotted main airframe (1) Recovery tube (1) Nose cone (3) Fins (1) Piston ejection kit: (1)
Bumble Bee The Bumble Bee kit contains all the parts necessary* to build a flying high power rocket: (1) Pre-slotted main airframe (1) Recovery tube (1) Nose cone (3) Fins (1) Piston ejection kit: (1)
NWIC Space Center s 2017 First Nations Launch Achievements
 NWIC Space Center s 2017 First Nations Launch Achievements On April 18, 2017, we were on two airplanes to Milwaukee, Wisconsin by 6:30 am for a long flight. There were 12 students, 3 mentors, 2 toddlers
NWIC Space Center s 2017 First Nations Launch Achievements On April 18, 2017, we were on two airplanes to Milwaukee, Wisconsin by 6:30 am for a long flight. There were 12 students, 3 mentors, 2 toddlers
University Student Launch Initiative Preliminary Design Review
 UNIVERSITY OF MINNESOTA TWIN CITIES 2012 2013 University Student Launch Initiative Preliminary Design Review Department of Aerospace Engineering and Mechanics 3/18/2013 2012-2013 University of Minnesota
UNIVERSITY OF MINNESOTA TWIN CITIES 2012 2013 University Student Launch Initiative Preliminary Design Review Department of Aerospace Engineering and Mechanics 3/18/2013 2012-2013 University of Minnesota
NASA University Student Launch Initiative (Sensor Payload) Final Design Review. Payload Name: G.A.M.B.L.S.
 Final Design Review. Payload Name: G.A.M.B.L.S.") NASA University Student Launch Initiative (Sensor Payload) Final Design Review Payload Name: G.A.M.B.L.S. CPE496-01 Computer Engineering Design II Electrical and Computer Engineering The University of
NASA University Student Launch Initiative (Sensor Payload) Final Design Review Payload Name: G.A.M.B.L.S. CPE496-01 Computer Engineering Design II Electrical and Computer Engineering The University of
Electronic Deployment
 Electronic Deployment and a little bit of recovery too! By: Gerald Meux, Jr. NAR and TRA Level 3 1-3-11 8/28/2014 Electronic Deployment - Gerald Meux, Jr. 1 Table of Contents 8/28/2014 Electronic Deployment
Electronic Deployment and a little bit of recovery too! By: Gerald Meux, Jr. NAR and TRA Level 3 1-3-11 8/28/2014 Electronic Deployment - Gerald Meux, Jr. 1 Table of Contents 8/28/2014 Electronic Deployment
Madison West High School Green Team
 Madison West High School Green Team The Effect of Gravitational Forces on Arabidopsis Thaliana Development Flight Readiness Review The Vehicle Mission Performance Criteria Successful two stage flight Altitude
Madison West High School Green Team The Effect of Gravitational Forces on Arabidopsis Thaliana Development Flight Readiness Review The Vehicle Mission Performance Criteria Successful two stage flight Altitude
First Nations Launch Rocket Competition 2016
 First Nations Launch Rocket Competition 2016 Competition Date April 21-22, 2016 Carthage College Kenosha, WI April 23, 2016 Richard Bong Recreational Park Kansasville, WI Meet the Team Wisconsin Space
First Nations Launch Rocket Competition 2016 Competition Date April 21-22, 2016 Carthage College Kenosha, WI April 23, 2016 Richard Bong Recreational Park Kansasville, WI Meet the Team Wisconsin Space
AUBURN UNIVERSITY STUDENT LAUNCH. Project Nova. 211 Davis Hall AUBURN, AL Post Launch Assessment Review
 AUBURN UNIVERSITY STUDENT LAUNCH Project Nova 211 Davis Hall AUBURN, AL 36849 Post Launch Assessment Review April 19, 2018 Table of Contents Table of Contents...2 List of Tables...3 Section 1: Launch Vehicle
AUBURN UNIVERSITY STUDENT LAUNCH Project Nova 211 Davis Hall AUBURN, AL 36849 Post Launch Assessment Review April 19, 2018 Table of Contents Table of Contents...2 List of Tables...3 Section 1: Launch Vehicle
Modified shock-cord mount and cables (cables are shown pushed into motor mount here)
") Building the Ariel Builder: Ray Wilkinson This is Ray Wilkinson's own rocket, but will mostly reside at UH, and will be used for display purposes as well as being flown. It's built from a kit made by PML
Building the Ariel Builder: Ray Wilkinson This is Ray Wilkinson's own rocket, but will mostly reside at UH, and will be used for display purposes as well as being flown. It's built from a kit made by PML
COMPLETED ASTROBEE D ADVANCED MODEL ROCKET ADVANCED MODEL ROCKET
 19915-1092 Rev.6/99 BEFORE YOU BEGIN: ADVANCED MODEL ROCKET Assembly and Operation Instructions COMPLETED ASTROBEE D ADVANCED MODEL ROCKET Study the illustrations and sequence of assembly. The sequence
19915-1092 Rev.6/99 BEFORE YOU BEGIN: ADVANCED MODEL ROCKET Assembly and Operation Instructions COMPLETED ASTROBEE D ADVANCED MODEL ROCKET Study the illustrations and sequence of assembly. The sequence
Flight Readiness Review Report NASA Student Launch Florida International University American Society of Mechanical Engineers (FIU-ASME)
") Flight Readiness Review Report 2014-2015 NASA Student Launch Florida International University American Society of Mechanical Engineers (FIU-ASME) Florida International University Engineering Center College
Flight Readiness Review Report 2014-2015 NASA Student Launch Florida International University American Society of Mechanical Engineers (FIU-ASME) Florida International University Engineering Center College
Student Launch. Enclosed: Proposal. Submitted by: Rocket Team Project Lead: David Eilken. Submission Date: September 30, 2016
 University of Evansville Student Launch Enclosed: Proposal Submitted by: 2016 2017 Rocket Team Project Lead: David Eilken Submission Date: September 30, 2016 Payload: Fragile Material Protection Submitted
University of Evansville Student Launch Enclosed: Proposal Submitted by: 2016 2017 Rocket Team Project Lead: David Eilken Submission Date: September 30, 2016 Payload: Fragile Material Protection Submitted
Preliminary Design Review
 Preliminary Design Review November 16, 2016 11/2016 California State Polytechnic University, Pomona 3801 W Temple Ave, Pomona, CA 91768 Student Launch Competition 2016-2017 1 Agenda 1.0 General Information
Preliminary Design Review November 16, 2016 11/2016 California State Polytechnic University, Pomona 3801 W Temple Ave, Pomona, CA 91768 Student Launch Competition 2016-2017 1 Agenda 1.0 General Information
University of North Dakota Department of Physics Frozen Fury Rocketry Team
 University of North Dakota Department of Physics Frozen Fury Rocketry Team NASA Student Launch Initiative Flight Readiness Review - Report Submitted by: The University of North Dakota Frozen Fury Rocketry
University of North Dakota Department of Physics Frozen Fury Rocketry Team NASA Student Launch Initiative Flight Readiness Review - Report Submitted by: The University of North Dakota Frozen Fury Rocketry
Rocketry Projects Conducted at the University of Cincinnati
 Rocketry Projects Conducted at the University of Cincinnati 2009-2010 Grant Schaffner, Ph.D. (Advisor) Rob Charvat (Student) 17 September 2010 1 Spacecraft Design Course Objectives Students gain experience
Rocketry Projects Conducted at the University of Cincinnati 2009-2010 Grant Schaffner, Ph.D. (Advisor) Rob Charvat (Student) 17 September 2010 1 Spacecraft Design Course Objectives Students gain experience
MR-1. Please read and understand all instructions before building!
 MR-1 This kit contains all the parts necessary* to build a flying high power rocket: (1) Pre-slotted main airframe (1) Nose cone with strap (3) Fins (1) Transition (1) Airframe section 1 long (1) Piston
MR-1 This kit contains all the parts necessary* to build a flying high power rocket: (1) Pre-slotted main airframe (1) Nose cone with strap (3) Fins (1) Transition (1) Airframe section 1 long (1) Piston
Skill Level 3 Average Skills Needed. Skill Level 3. Ibis Parts List
 Kit #05152 Skill Level 3 Made In USA Ibis Parts List Item # Item Name Qty 10076 AT- 18/3.5" LC - Engine Mount Tube 1 10123 AT- 33/6.5" LC - Body Tube 1 10124 AT- 33/18" LC - Body Tube 1 13029 CR- 13/18
Kit #05152 Skill Level 3 Made In USA Ibis Parts List Item # Item Name Qty 10076 AT- 18/3.5" LC - Engine Mount Tube 1 10123 AT- 33/6.5" LC - Body Tube 1 10124 AT- 33/18" LC - Body Tube 1 13029 CR- 13/18
NASA SL Preliminary Design Review
 NASA SL Preliminary Design Review University of Alabama in Huntsville 1 Mission Summary Design, fabricate, test and fly a rocket and payload to 1 mile in altitude Deploy a rover upon landing to autonomously
NASA SL Preliminary Design Review University of Alabama in Huntsville 1 Mission Summary Design, fabricate, test and fly a rocket and payload to 1 mile in altitude Deploy a rover upon landing to autonomously
This Week. Next Week 4/7/15
 E80 Spring 2015 This Week! Transfer breadboard circuit to PC board.! Verify everything still works.! Get data logger working.! Pass off consists of: " Power PC board with data logger & start logging. "
E80 Spring 2015 This Week! Transfer breadboard circuit to PC board.! Verify everything still works.! Get data logger working.! Pass off consists of: " Power PC board with data logger & start logging. "
Cornell Rocketry Team. NASA Student Launch Competition CORNELL ROCKETRY TEAM
 2015-2016 CORNELL ROCKETRY TEAM Presentation Centennial Challenge MAV Participant NASA Student Launch Competition LAUNCH VEHICLE GENERAL DIMENSIONS Airframe Tubing: OD = 3.98 in ID = 3.9 in Couplers: OD
2015-2016 CORNELL ROCKETRY TEAM Presentation Centennial Challenge MAV Participant NASA Student Launch Competition LAUNCH VEHICLE GENERAL DIMENSIONS Airframe Tubing: OD = 3.98 in ID = 3.9 in Couplers: OD