ParkNet: Drive-by Sensing of Road-side Parking Statistics
|
|
|
- Noreen Powell
- 6 years ago
- Views:
Transcription
1 ParkNet: Drive-by Sensing of Road-side Parking Statistics Published by: Mathur, Suhas, Tong Jin, Nikhil Kasturirangan, Janani Chandrasekaran, Wenzhi Xue, Marco Gruteser, and Wade Trappe in Mobisys Presented by Ruilin Liu Rutgers University 01/25/2017 Part of these slides are reused from:

![congestion by drivers cruising parking [2] E.g. Westwood](/docs-images/73/69588418/images/2-2.jpg "Village creates 950,000 + VMT, 95,000+ hours and 47,000")
2 Motivation 3.5 to 14 minute cruising time per trip [2] 30% traffic congestion by drivers cruising parking [2] E.g. Westwood Village creates 950,000 + VMT, 95,000+ hours and 47,000 gallons of gasoline wasted, and produces 730 tons of CO2 [3]



3 Parking availability detection Human report and dedicated sensors (high cost) Image based classification (customized for each facility) People are still in lack of parking information!!

4 Introduction - ParkNet Drive-by Parking Monitoring Uses ultrasonic sensor attached to the side of cars Uses GPS to track the real-time location Detects parked cars and vacant spaces Attaches to vehicles that comb through a city Low cost Low penetration



5 ParkNet Architecture Space count (most parking applications) Occupancy Map (parking enforcement)

6 Prototype Development Moxbotix WR1 rangefinder Emits every 50ms inches PS3 Eye webcam 20 fps Used for ground truth Garmin GPS Readings come at 5Hz Errors can be less than 3m On-board PC


7 Challenges Ultrasonic sensor does not have a perfectly narrowwidth False Positive: Trees, people, recycling bins False Negative: missed a parked vehicles GPS Errors Mis-match a detected car to a wrong spot

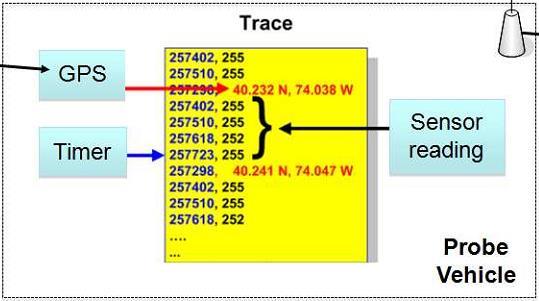
8 3 vehicles 3 specific areas 2 month period 500 miles Prototype Deployment All range sensor data is tagged with: Kernel-time, range, latitude, longitude, speed

9 Parked Vehicle Detection - Dips dip : a change in the rangefinder readings which usually occurs when there is an object in view Two Cars Parked Together

10 Parked Vehicle Classifier Sensor trace (width and depth) measured against a threshold to determine if a dip is a parked car. Threshold established from training data 2.52 meters width 89.7 inches Error rate: 12.4%
11 Parking Availability Detection Algorithms Slotted Model Determines the dips classified as cars Subtracts the # of cars from the # of spaces in the area Un-slotted Model Determines which dips are classified as cars Measures the distance between dips to see if it is large enough to fit a car Training 20% of the data is used for training 80% of the data is used for evaluating performance
12 Parking Availability Detection - Slotted # of detected car/ # of real parked car = Vary the depth threshold
13 Parking Availability Detection - Unslotted detected empty distance / actual empty distance = Vary the width threshold
14 Occupancy Map Understand GPS Error GPS errors has strong spatiotemporal correlation Implies that we can use the reading from one object to correct the objects nearby
15 Occupancy Map Environmental Fingerprinting Collect the real location of known static object GPS coordinates indicate system is near known object Parses rangefinder readings to get a series of dips Tries match the dips with consecutive known objects If object found, compute the offset as the GPS error

16 Occupancy Map Full workflow Correct the location of parked vehicle using detected GPS error Assign the vehicle to the slots to minimize the total position differences
17 Mobility Study - Taxicab Routes SF GPS positions of 536 taxicabs for a month (every 60 seconds) Path were approximated by linear interpolation Determined the mean time between cabs visiting a particular road segment (cell). Greater San Francisco Downtown San Francisco
18 Mobility Study - Cost Analysis ParkNet Cost: Parknet: (~$400 per vehicle) x (# of vehicles needed to get desired rate of detection) Fixed Sensor: ($ per space) x (number of spaces) Example: 6000 parking spots (SFPark) ParkNet: 300 cabs, 80% coverage every 25 minutes, $0.12 million Fixed Sensor: $1.5 million
19 Accuracy Conclusions 95% accurate parking space counts 90% accurate parking occupancy maps Frequency and Coverage 536 vehicles equipped Covers 85% every 25 minutes of a downtown area Covers 80% every 10 minutes of a downtown area Cost Benefits Estimated factor of times cheaper than current systems
20 Multilane Roads Limitations Moving cars could be determined by long dips Rangefinder would need to be longer Speed Limitations Sensors currently work best at speeds below 40mph Obtaining Parking Spot Maps Difficult for large areas Algorithms could determine location surroundings after data collection has been started Still Use Dedicated Sensor
21 Q & A Thank you for your attentions.
22 References [1] Mathur, Suhas, et al. "Parknet: drive-by sensing of road-side parking statistics." Proceedings of the 8th international conference on Mobile systems, applications, and services. ACM, [2] Shoup, Donald C. "Cruising for parking." Transport Policy 13.6 (2006): [3] Shoup, Donald C. "Cruising for parking.
BigRoad. Scaling Road Data Acquisition for Dependable Self-Driving. The first two authors are co-primary student authors. *
 BigRoad Scaling Road Data Acquisition for Dependable Self-Driving Luyang Liu *, Hongyu Li *, Jian Liu #, Cagdas Karatas *, Yan Wang, Marco Gruteser *, Yingying Chen #, Richard P. Martin * The first two
BigRoad Scaling Road Data Acquisition for Dependable Self-Driving Luyang Liu *, Hongyu Li *, Jian Liu #, Cagdas Karatas *, Yan Wang, Marco Gruteser *, Yingying Chen #, Richard P. Martin * The first two
Toward Detection of Unsafe Driving with Wearables
 Toward Detection of Unsafe Driving with Wearables Luyang Liu Cagdas Karatas, Hongyu Li, Marco Gruteser, Richard Martin WINLAB, Rutgers University Sheng Tan, Jie Yang Florida State University Yingying Chen
Toward Detection of Unsafe Driving with Wearables Luyang Liu Cagdas Karatas, Hongyu Li, Marco Gruteser, Richard Martin WINLAB, Rutgers University Sheng Tan, Jie Yang Florida State University Yingying Chen
Real-time Bus Tracking using CrowdSourcing
 Real-time Bus Tracking using CrowdSourcing R & D Project Report Submitted in partial fulfillment of the requirements for the degree of Master of Technology by Deepali Mittal 153050016 under the guidance
Real-time Bus Tracking using CrowdSourcing R & D Project Report Submitted in partial fulfillment of the requirements for the degree of Master of Technology by Deepali Mittal 153050016 under the guidance
(2111) Digital Test Rolling REVISED 07/22/14 DO NOT REMOVE THIS. IT NEEDS TO STAY IN FOR THE CONTRACTORS. SP
 Digital Test Rolling REVISED 07/22/14 DO NOT REMOVE THIS. IT NEEDS TO STAY IN FOR THE CONTRACTORS. SP") S-xx (2111) Digital Test Rolling REVISED 07/22/14 DO NOT REMOVE THIS. IT NEEDS TO STAY IN FOR THE CONTRACTORS. SP2014-54.2 The Veda Software and Digital Test Rolling forms are available on the MnDOT Advanced
S-xx (2111) Digital Test Rolling REVISED 07/22/14 DO NOT REMOVE THIS. IT NEEDS TO STAY IN FOR THE CONTRACTORS. SP2014-54.2 The Veda Software and Digital Test Rolling forms are available on the MnDOT Advanced
SPEED IN URBAN ENV VIORNMENTS IEEE CONFERENCE PAPER REVIW CSC 8251 ZHIBO WANG
 SENSPEED: SENSING G DRIVING CONDITIONS TO ESTIMATE VEHICLE SPEED IN URBAN ENV VIORNMENTS IEEE CONFERENCE PAPER REVIW CSC 8251 ZHIBO WANG EXECUTIVE SUMMARY Brief Introduction of SenSpeed Basic Idea of Vehicle
SENSPEED: SENSING G DRIVING CONDITIONS TO ESTIMATE VEHICLE SPEED IN URBAN ENV VIORNMENTS IEEE CONFERENCE PAPER REVIW CSC 8251 ZHIBO WANG EXECUTIVE SUMMARY Brief Introduction of SenSpeed Basic Idea of Vehicle
Journal of Emerging Trends in Computing and Information Sciences
 Pothole Detection Using Android Smartphone with a Video Camera 1 Youngtae Jo *, 2 Seungki Ryu 1 Korea Institute of Civil Engineering and Building Technology, Korea E-mail: 1 ytjoe@kict.re.kr, 2 skryu@kict.re.kr
Pothole Detection Using Android Smartphone with a Video Camera 1 Youngtae Jo *, 2 Seungki Ryu 1 Korea Institute of Civil Engineering and Building Technology, Korea E-mail: 1 ytjoe@kict.re.kr, 2 skryu@kict.re.kr
Caltrain Downtown Extension Study Ridership Forecast Summary
 Caltrain Downtown Extension Study Ridership Forecast Summary presented to Transbay Joint Powers Authority presented by Cambridge Systematics date: March 12, 2009 Transportation leadership you can trust.
Caltrain Downtown Extension Study Ridership Forecast Summary presented to Transbay Joint Powers Authority presented by Cambridge Systematics date: March 12, 2009 Transportation leadership you can trust.
An Innovative Approach
 Traffic Flow Theory and its Applications in Urban Environments An Innovative Approach Presented by Dr. Jin Cao 30.01.18 1 Traffic issues in urban environments Pedestrian 30.01.18 Safety Environment 2 Traffic
Traffic Flow Theory and its Applications in Urban Environments An Innovative Approach Presented by Dr. Jin Cao 30.01.18 1 Traffic issues in urban environments Pedestrian 30.01.18 Safety Environment 2 Traffic
Deep Learning Will Make Truly Self-Driving Cars a Reality
 Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Ly, Hahn, Jesper and Riccardo
 Ly, Hahn, Jesper and Riccardo Problem Statistics Milan situation (according to a Study from Politecnico of Milano) 45% of city pollution come from car emissions In 2012 Milano had 2 days traffic block
Ly, Hahn, Jesper and Riccardo Problem Statistics Milan situation (according to a Study from Politecnico of Milano) 45% of city pollution come from car emissions In 2012 Milano had 2 days traffic block
Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System
 System") Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System 2017 Los Angeles Environmental Forum August 28th Ziran Wang ( 王子然 ), Guoyuan Wu, Peng Hao, Kanok Boriboonsomsin, and Matthew
Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System 2017 Los Angeles Environmental Forum August 28th Ziran Wang ( 王子然 ), Guoyuan Wu, Peng Hao, Kanok Boriboonsomsin, and Matthew
I-95 Corridor Coalition Vehicle Probe Project: HERE, INRIX and TOMTOM Data Validation. Report for North Carolina (#08) I-240, I-40 and I-26
 I-240, I-40 and I-26") I-95 Corridor Coalition Vehicle Probe Project: HERE, INRIX and TOMTOM Data Validation Report for North Carolina (#08) I-240, I-40 and I-26 Prepared by: Masoud Hamedi, Sanaz Aliari University of Maryland,
I-95 Corridor Coalition Vehicle Probe Project: HERE, INRIX and TOMTOM Data Validation Report for North Carolina (#08) I-240, I-40 and I-26 Prepared by: Masoud Hamedi, Sanaz Aliari University of Maryland,
Project Title: Using Truck GPS Data for Freight Performance Analysis in the Twin Cities Metro Area Prepared by: Chen-Fu Liao (PI) Task Due: 7/31/2013
 Task Due: 7/31/2013") Project Title: Using Truck GPS Data for Freight Performance Analysis in the Twin Cities Metro Area Prepared by: Chen-Fu Liao (PI) Task Due: 7/31/2013 TASK #3 PROCESS TRUCK GPS DATA AND DERIVE PERFORMANCE
Project Title: Using Truck GPS Data for Freight Performance Analysis in the Twin Cities Metro Area Prepared by: Chen-Fu Liao (PI) Task Due: 7/31/2013 TASK #3 PROCESS TRUCK GPS DATA AND DERIVE PERFORMANCE
CSE 352: Self-Driving Cars. Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark
 CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
Growing Charging Station Networks with Trajectory Data Analytics
 Growing Charging Station Networks with Trajectory Data Analytics Yanhua Li 1, Jun Luo 2, Chi-Yin Chow 3, Kam-Lam Chan 3, Ye Ding 4, and Fan Zhang 2 1WPI, CAS 2, CityU 3, HKUST 4 Contact: yli15@wpi.edu
Growing Charging Station Networks with Trajectory Data Analytics Yanhua Li 1, Jun Luo 2, Chi-Yin Chow 3, Kam-Lam Chan 3, Ye Ding 4, and Fan Zhang 2 1WPI, CAS 2, CityU 3, HKUST 4 Contact: yli15@wpi.edu
Intelligent Vehicle Systems
 Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
Leveraging AI for Self-Driving Cars at GM. Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel
 Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
Jimi van der Woning. 30 November 2010
 Jimi van der Woning 30 November 2010 The importance of robotic cars DARPA Hardware Software Path planning Google Car Where are we now? Future 30-11-2010 Jimi van der Woning 2/17 Currently over 800 million
Jimi van der Woning 30 November 2010 The importance of robotic cars DARPA Hardware Software Path planning Google Car Where are we now? Future 30-11-2010 Jimi van der Woning 2/17 Currently over 800 million
C A. Right on track to enhanced driving safety. CAPS - Combined Active & Passive Safety. Robert Bosch GmbH CC/PJ-CAPS: Jochen Pfäffle
 Right on track to enhanced driving safety C A SP Robert Bosch GmbH CC/PJ-CAPS: Jochen Pfäffle 1 Outline CAPS motivation & content of activity Accident analysis & development methodology Market, drivers,
Right on track to enhanced driving safety C A SP Robert Bosch GmbH CC/PJ-CAPS: Jochen Pfäffle 1 Outline CAPS motivation & content of activity Accident analysis & development methodology Market, drivers,
I-95 Corridor Coalition Vehicle Probe Project: HERE, INRIX and TOMTOM Data Validation
 I-95 Corridor Coalition Vehicle Probe Project: HERE, INRIX and TOMTOM Data Validation Report for Georgia (#03) I-75 Prepared by: Masoud Hamedi, Sanaz Aliari, Sara Zahedian University of Maryland, College
I-95 Corridor Coalition Vehicle Probe Project: HERE, INRIX and TOMTOM Data Validation Report for Georgia (#03) I-75 Prepared by: Masoud Hamedi, Sanaz Aliari, Sara Zahedian University of Maryland, College
AUTOMATED VEHICLES AND TRANSIT
 AUTOMATED VEHICLES AND TRANSIT 2017 OPTC Conference Oct. 3, 2017 Pendleton, OR Andrew Dick, CAEV Advisor 2 1 94% of motor vehicle crashes are primarily caused by human error motor vehicle deaths in U.S.,
AUTOMATED VEHICLES AND TRANSIT 2017 OPTC Conference Oct. 3, 2017 Pendleton, OR Andrew Dick, CAEV Advisor 2 1 94% of motor vehicle crashes are primarily caused by human error motor vehicle deaths in U.S.,
Spatial and Temporal Analysis of Real-World Empirical Fuel Use and Emissions
 Spatial and Temporal Analysis of Real-World Empirical Fuel Use and Emissions Extended Abstract 27-A-285-AWMA H. Christopher Frey, Kaishan Zhang Department of Civil, Construction and Environmental Engineering,
Spatial and Temporal Analysis of Real-World Empirical Fuel Use and Emissions Extended Abstract 27-A-285-AWMA H. Christopher Frey, Kaishan Zhang Department of Civil, Construction and Environmental Engineering,
Employing Opportunistic Charging for Electric Taxicabs to Reduce Idle Time
 Employing Opportunistic Charging for Electric Taxicabs to Reduce Idle Time Li Yan, Haiying Shen, Zhuozhao Li, Ankur Sarker, John A. Stankovic, Chenxi Qiu, Juanjuan Zhao and Chengzhong Xu ACM UbiComp Singapore
Employing Opportunistic Charging for Electric Taxicabs to Reduce Idle Time Li Yan, Haiying Shen, Zhuozhao Li, Ankur Sarker, John A. Stankovic, Chenxi Qiu, Juanjuan Zhao and Chengzhong Xu ACM UbiComp Singapore
I-95 Corridor Coalition
 I-95 Corridor Coalition I-95 Corridor Coalition Vehicle Probe Project: Validation of INRIX Data Report for New Hampshire (#1) I-89 and I-93 October 2016 I-95 CORRIDOR COALITION VEHICLE PROBE PROJECT VALIDATION
I-95 Corridor Coalition I-95 Corridor Coalition Vehicle Probe Project: Validation of INRIX Data Report for New Hampshire (#1) I-89 and I-93 October 2016 I-95 CORRIDOR COALITION VEHICLE PROBE PROJECT VALIDATION
Project Title: Using Truck GPS Data for Freight Performance Analysis in the Twin Cities Metro Area Prepared by: Chen-Fu Liao (PI) Task Due: 9/30/2013
 Task Due: 9/30/2013") MnDOT Contract No. 998 Work Order No.47 213 Project Title: Using Truck GPS Data for Freight Performance Analysis in the Twin Cities Metro Area Prepared by: Chen-Fu Liao (PI) Task Due: 9/3/213 TASK #4:
MnDOT Contract No. 998 Work Order No.47 213 Project Title: Using Truck GPS Data for Freight Performance Analysis in the Twin Cities Metro Area Prepared by: Chen-Fu Liao (PI) Task Due: 9/3/213 TASK #4:
Cooperative brake technology
 Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
GIS and GPS as useful tools to determine transportation noise levels
 GIS and GPS as useful tools to determine transportation noise levels D. Fabjan 1, D. Paliska 1 & S. Drobne 2 1 Faculty of Maritime Studies and Transportation, University of Ljubljana, Slovenia 2 Faculty
GIS and GPS as useful tools to determine transportation noise levels D. Fabjan 1, D. Paliska 1 & S. Drobne 2 1 Faculty of Maritime Studies and Transportation, University of Ljubljana, Slovenia 2 Faculty
A Presentation on. Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing
 in autonomous vehicles for alerting driver during overtaking and lane changing") A Presentation on Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing Presented By: Abhishek Shriram Umachigi Department of Electrical Engineering
A Presentation on Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing Presented By: Abhishek Shriram Umachigi Department of Electrical Engineering
Implementation of Future Transportation Technologies: Getting Beyond the Low Hanging Fruit without Chopping Down the Tree
 Implementation of Future Transportation Technologies: Getting Beyond the Low Hanging Fruit without Chopping Down the Tree Balancing Business Needs with Societal Change Paradigm Shifts Consumer Values Global
Implementation of Future Transportation Technologies: Getting Beyond the Low Hanging Fruit without Chopping Down the Tree Balancing Business Needs with Societal Change Paradigm Shifts Consumer Values Global
RTID Travel Demand Modeling: Assumptions and Method of Analysis
 RTID Travel Demand Modeling: Assumptions and Method of Analysis Overall Model and Scenario Assumptions The Puget Sound Regional Council s (PSRC) regional travel demand model was used to forecast travel
RTID Travel Demand Modeling: Assumptions and Method of Analysis Overall Model and Scenario Assumptions The Puget Sound Regional Council s (PSRC) regional travel demand model was used to forecast travel
18th ICTCT Workshop, Helsinki, October Technical feasibility of safety related driving assistance systems
 18th ICTCT Workshop, Helsinki, 27-28 October 2005 Technical feasibility of safety related driving assistance systems Meng Lu Radboud University Nijmegen, The Netherlands, m.lu@fm.ru.nl Kees Wevers NAVTEQ,
18th ICTCT Workshop, Helsinki, 27-28 October 2005 Technical feasibility of safety related driving assistance systems Meng Lu Radboud University Nijmegen, The Netherlands, m.lu@fm.ru.nl Kees Wevers NAVTEQ,
Integrating remote sensing and ground monitoring data to improve estimation of PM 2.5 concentrations for chronic health studies
 Integrating remote sensing and ground monitoring data to improve estimation of PM 2.5 concentrations for chronic health studies Chris Paciorek and Yang Liu Departments of Biostatistics and Environmental
Integrating remote sensing and ground monitoring data to improve estimation of PM 2.5 concentrations for chronic health studies Chris Paciorek and Yang Liu Departments of Biostatistics and Environmental
Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications
 Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications Jiaqi Ma Assistant Professor University of Cincinnati ITS Midwest Annual Meeting Columbus, Ohio, September 29, 2017 Outline
Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications Jiaqi Ma Assistant Professor University of Cincinnati ITS Midwest Annual Meeting Columbus, Ohio, September 29, 2017 Outline
Facts and Figures. October 2006 List Release Special Edition BWC National Benefits and Related Facts October, 2006 (Previous Versions Obsolete)
") Facts and Figures Date October 2006 List Release Special Edition BWC National Benefits and Related Facts October, 2006 (Previous Versions Obsolete) Best Workplaces for Commuters - Environmental and Energy
Facts and Figures Date October 2006 List Release Special Edition BWC National Benefits and Related Facts October, 2006 (Previous Versions Obsolete) Best Workplaces for Commuters - Environmental and Energy
Detection of rash driving on highways
 Detection of rash driving on highways 1 Ladly Patel, 2 Kumar Abhishek Gaurav, 3 Dr. Revathi V 1,2 Mtech. CSE (Big Data & IoT), 3 Associate Professor Dayananda Sagar University, Bengaluru, India Abstract-
Detection of rash driving on highways 1 Ladly Patel, 2 Kumar Abhishek Gaurav, 3 Dr. Revathi V 1,2 Mtech. CSE (Big Data & IoT), 3 Associate Professor Dayananda Sagar University, Bengaluru, India Abstract-
An Investigation of the Distribution of Driving Speeds Using In-vehicle GPS Data. Jianhe Du Lisa Aultman-Hall University of Connecticut
 An Investigation of the Distribution of Driving Speeds Using In-vehicle GPS Data Jianhe Du Lisa Aultman-Hall University of Connecticut Problem Statement Traditional speed collection methods can not record
An Investigation of the Distribution of Driving Speeds Using In-vehicle GPS Data Jianhe Du Lisa Aultman-Hall University of Connecticut Problem Statement Traditional speed collection methods can not record
Introduction Projects Basic Design Perception Motion Planning Mission Planning Behaviour Conclusion. Autonomous Vehicles
 Dipak Chaudhari Sriram Kashyap M S 2008 Outline 1 Introduction 2 Projects 3 Basic Design 4 Perception 5 Motion Planning 6 Mission Planning 7 Behaviour 8 Conclusion Introduction Unmanned Vehicles: No driver
Dipak Chaudhari Sriram Kashyap M S 2008 Outline 1 Introduction 2 Projects 3 Basic Design 4 Perception 5 Motion Planning 6 Mission Planning 7 Behaviour 8 Conclusion Introduction Unmanned Vehicles: No driver
Automated Occupancy Detection October 2015 (Phase I) Demonstration Results Presented by Kathy McCune
 Demonstration Results Presented by Kathy McCune") Automated Occupancy Detection October 2015 (Phase I) Demonstration Results Presented by Kathy McCune 2016 TRB Managed Lanes Conference May 5th, Session 6 Presentation Background Outline Metro ExpressLanes
Automated Occupancy Detection October 2015 (Phase I) Demonstration Results Presented by Kathy McCune 2016 TRB Managed Lanes Conference May 5th, Session 6 Presentation Background Outline Metro ExpressLanes
Earth Day Report April 22, 2013
 Earth Day Report April 22, 2013 T A C O M A, W A S H I N G T O N 1 The Paper Report City of Tacoma Copier Paper Usage Other- Not Other- Paper 6% 4% 23% 30% 0% / Virgin Paper 32% 4% 50% 31% 100% The City
Earth Day Report April 22, 2013 T A C O M A, W A S H I N G T O N 1 The Paper Report City of Tacoma Copier Paper Usage Other- Not Other- Paper 6% 4% 23% 30% 0% / Virgin Paper 32% 4% 50% 31% 100% The City
AUTONOMY AND SMART URBAN MOBILITY
 AUTONOMY AND SMART URBAN MOBILITY November 15, 2017 Emilio Frazzoli Professor of Dynamic Systems and Control, ETH Zürich Co-Founder and CTO Why Self-driving Vehicles? A financial perspective on personal
AUTONOMY AND SMART URBAN MOBILITY November 15, 2017 Emilio Frazzoli Professor of Dynamic Systems and Control, ETH Zürich Co-Founder and CTO Why Self-driving Vehicles? A financial perspective on personal
Enhanced Interlock Technology
 Enhanced Interlock Technology Purpose statement: To develop a guidance document for state administrators on various enhanced technological additions to the ignition interlock device that will assist in
Enhanced Interlock Technology Purpose statement: To develop a guidance document for state administrators on various enhanced technological additions to the ignition interlock device that will assist in
UNIVERSITÉ DE MONCTON FACULTÉ D INGÉNIERIE. Moncton, NB, Canada PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY
 FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
Injuries from Motor Vehicle Crashes 48,000 46,000
 Trillion Vehicle- Miles Traveled Annual fatalities from MVC Fatalities/ 100 million miles 8/5/2013 New Vehicle Safety Technologies Kathleen D. Klinich Injuries from Motor Vehicle Crashes 48,000 46,000
Trillion Vehicle- Miles Traveled Annual fatalities from MVC Fatalities/ 100 million miles 8/5/2013 New Vehicle Safety Technologies Kathleen D. Klinich Injuries from Motor Vehicle Crashes 48,000 46,000
Transfer. CE 431: Solid Waste Management
 Transfer CE 431: Solid Waste Management Transfer Stations Transfer stations are the sites on which transfer of waste is carried out, placed on small and then larger vehicles for transportation over long
Transfer CE 431: Solid Waste Management Transfer Stations Transfer stations are the sites on which transfer of waste is carried out, placed on small and then larger vehicles for transportation over long
Technical Article. How to implement a low-cost, accurate state-of-charge gauge for an electric scooter. Manfred Brandl
 Technical How to implement a low-cost, accurate state-of-charge gauge for an electric scooter Manfred Brandl How to implement a low-cost, accurate state-of-charge gauge for an electric scooter Manfred
Technical How to implement a low-cost, accurate state-of-charge gauge for an electric scooter Manfred Brandl How to implement a low-cost, accurate state-of-charge gauge for an electric scooter Manfred
Data Analytics in the Connected Vehicle Future to Revolutionize Safety, Emissions, and Funding
 1 Data Analytics in the Connected Vehicle Future to Revolutionize Safety, Emissions, and Funding H. Scott Matthews Civil and Environmental Engineering / Engineering and Public Policy Carnegie Mellon University
1 Data Analytics in the Connected Vehicle Future to Revolutionize Safety, Emissions, and Funding H. Scott Matthews Civil and Environmental Engineering / Engineering and Public Policy Carnegie Mellon University
EN 1 EN. Second RDE LDV Package Skeleton for the text (V3) Informal EC working document
 Informal EC working document") Second RDE LDV Package Skeleton for the text (V3) Informal EC working document Introduction This document is a skeleton of the intended second RDE package. The document identifies which sections-appendices
Second RDE LDV Package Skeleton for the text (V3) Informal EC working document Introduction This document is a skeleton of the intended second RDE package. The document identifies which sections-appendices
Xerox Vehicle Occupancy Detection System
 Xerox Vehicle Occupancy Detection System Xerox America s Commercial, State and Government Transportation (ACSGT) Xerox Innovations Group (XIG) Xerox Research Center Webster (XRCW) Contact: Mark Cantelli
Xerox Vehicle Occupancy Detection System Xerox America s Commercial, State and Government Transportation (ACSGT) Xerox Innovations Group (XIG) Xerox Research Center Webster (XRCW) Contact: Mark Cantelli
THE FUTURE OF TRANSPORTATION DESIGN WITH AV/CV TECHNOLOGY
 THE FUTURE OF TRANSPORTATION DESIGN WITH AV/CV TECHNOLOGY March 6, 2019 Chris Pauly 2018 HDR, Inc., all rights reserved. Technology Trends Future-Proofing Roadways Timelines TECHNOLOGY TRENDS Autonomous
THE FUTURE OF TRANSPORTATION DESIGN WITH AV/CV TECHNOLOGY March 6, 2019 Chris Pauly 2018 HDR, Inc., all rights reserved. Technology Trends Future-Proofing Roadways Timelines TECHNOLOGY TRENDS Autonomous
LONG-TERM TRANSPORTATION ELECTRICITY USE CONSIDERING AUTONOMOUS VEHICLES: ESTIMATES & POLICY OBSERVATIONS
 LONG-TERM TRANSPORTATION ELECTRICITY USE CONSIDERING AUTONOMOUS VEHICLES: ESTIMATES & POLICY OBSERVATIONS Dr. Peter Fox-Penner, Will Gorman, & Jennifer Hatch Boston University Institute For Sustainable
LONG-TERM TRANSPORTATION ELECTRICITY USE CONSIDERING AUTONOMOUS VEHICLES: ESTIMATES & POLICY OBSERVATIONS Dr. Peter Fox-Penner, Will Gorman, & Jennifer Hatch Boston University Institute For Sustainable
An overview of the on-going OSU instrumented probe vehicle research
 An overview of the on-going OSU instrumented probe vehicle research Benjamin Coifman, PhD Associate Professor The Ohio State University Department of Civil, Environmental, and Geodetic Engineering Department
An overview of the on-going OSU instrumented probe vehicle research Benjamin Coifman, PhD Associate Professor The Ohio State University Department of Civil, Environmental, and Geodetic Engineering Department
The Session.. Rosaria Silipo Phil Winters KNIME KNIME.com AG. All Right Reserved.
 The Session.. Rosaria Silipo Phil Winters KNIME 2016 KNIME.com AG. All Right Reserved. Past KNIME Summits: Merging Techniques, Data and MUSIC! 2016 KNIME.com AG. All Rights Reserved. 2 Analytics, Machine
The Session.. Rosaria Silipo Phil Winters KNIME 2016 KNIME.com AG. All Right Reserved. Past KNIME Summits: Merging Techniques, Data and MUSIC! 2016 KNIME.com AG. All Rights Reserved. 2 Analytics, Machine
Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions
 Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions GTC Europe 2017 Dominik Dörr 2 Motivation Virtual Prototypes Virtual Sensor Models CarMaker and NVIDIA DRIVE PX
Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions GTC Europe 2017 Dominik Dörr 2 Motivation Virtual Prototypes Virtual Sensor Models CarMaker and NVIDIA DRIVE PX
Safe, comfortable and eco-friendly, Smart Connected Society
 Safe, comfortable and eco-friendly, Smart Connected Society Big data Traffic Management Centre Traffic Management for CASE Telematics Centre Energy Management for EV mrong-way detection Safety Support
Safe, comfortable and eco-friendly, Smart Connected Society Big data Traffic Management Centre Traffic Management for CASE Telematics Centre Energy Management for EV mrong-way detection Safety Support
GCAT. University of Michigan-Dearborn
 GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
Performance Measure Summary - Grand Rapids MI. Performance Measures and Definition of Terms
 Performance Measure Summary - Grand Rapids MI There are several inventory and performance measures listed in the pages of this Urban Area Report for the years from 1982 to 2014. There is no single performance
Performance Measure Summary - Grand Rapids MI There are several inventory and performance measures listed in the pages of this Urban Area Report for the years from 1982 to 2014. There is no single performance
Citi's 2016 Car of the Future Symposium
 Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
CRSM: Crowdsourcing based Road Surface Monitoring
 CRSM: Crowdsourcing based Road Surface Monitoring Kongyang Chen 1, Mingming Lu 2, Guang Tan 1, and Jie Wu 3 1SIAT, Chinese Academy of Sciences, 2 Central South University 3Temple University Nov. 15 th,
CRSM: Crowdsourcing based Road Surface Monitoring Kongyang Chen 1, Mingming Lu 2, Guang Tan 1, and Jie Wu 3 1SIAT, Chinese Academy of Sciences, 2 Central South University 3Temple University Nov. 15 th,
NOWADAYS, among all transportation modes,
 IEEE TRANSACTIONS ON PARALLEL AND DISTRIBUTED SYSTEMS 1 Online Cruising Mile Reduction in Large-Scale Taxicab Networks Desheng Zhang, Student Member, IEEE, Tian He, Senior Member, IEEE, Shan Lin, Member,
IEEE TRANSACTIONS ON PARALLEL AND DISTRIBUTED SYSTEMS 1 Online Cruising Mile Reduction in Large-Scale Taxicab Networks Desheng Zhang, Student Member, IEEE, Tian He, Senior Member, IEEE, Shan Lin, Member,
Performance Measure Summary - Toledo OH-MI. Performance Measures and Definition of Terms
 Performance Measure Summary - Toledo OH-MI There are several inventory and performance measures listed in the pages of this Urban Area Report for the years from 1982 to 2014. There is no single performance
Performance Measure Summary - Toledo OH-MI There are several inventory and performance measures listed in the pages of this Urban Area Report for the years from 1982 to 2014. There is no single performance
Optimal Vehicle to Grid Regulation Service Scheduling
 Optimal to Grid Regulation Service Scheduling Christian Osorio Introduction With the growing popularity and market share of electric vehicles comes several opportunities for electric power utilities, vehicle
Optimal to Grid Regulation Service Scheduling Christian Osorio Introduction With the growing popularity and market share of electric vehicles comes several opportunities for electric power utilities, vehicle
Findings from the Limassol SUMP study
 5 th European Conference on Sustainable Urban Mobility Plans 14-15 May 2018 Nicosia, Cyprus Findings from the Limassol SUMP study Apostolos Bizakis Deputy PM General Information The largest city in the
5 th European Conference on Sustainable Urban Mobility Plans 14-15 May 2018 Nicosia, Cyprus Findings from the Limassol SUMP study Apostolos Bizakis Deputy PM General Information The largest city in the
Truck Drayage Metrics
 Truck Drayage Metrics Frank Harder The Group, Inc. AAPA/EDF Environmental Performance Metrics Workshop October 10, 2012 www.tiogagroup.com/215-557-2142 Key Questions and Answers Key questions Where are
Truck Drayage Metrics Frank Harder The Group, Inc. AAPA/EDF Environmental Performance Metrics Workshop October 10, 2012 www.tiogagroup.com/215-557-2142 Key Questions and Answers Key questions Where are
ROAD SAFETY RESEARCH, POLICING AND EDUCATION CONFERENCE, NOV 2001
 ROAD SAFETY RESEARCH, POLICING AND EDUCATION CONFERENCE, NOV 2001 Title Young pedestrians and reversing motor vehicles Names of authors Paine M.P. and Henderson M. Name of sponsoring organisation Motor
ROAD SAFETY RESEARCH, POLICING AND EDUCATION CONFERENCE, NOV 2001 Title Young pedestrians and reversing motor vehicles Names of authors Paine M.P. and Henderson M. Name of sponsoring organisation Motor
Transportation Demand Management January 25, 2017 Waterfront Plan Transportation Working Group. Date & Location
 Transportation Demand Management January 25, 2017 Waterfront Plan Transportation Working Group Date & Location TDM Opportunities: Port Uses Visitor-serving uses Port tenants Future development Many TDM
Transportation Demand Management January 25, 2017 Waterfront Plan Transportation Working Group Date & Location TDM Opportunities: Port Uses Visitor-serving uses Port tenants Future development Many TDM
Park Smart. Parking Solution for Smart Cities
 Park Smart Parking Solution for Smart Cities Finding a car parking often becomes a real problem that causes loss of time, increasing pollution and traffic. According to the insurer Allianz in industrialized
Park Smart Parking Solution for Smart Cities Finding a car parking often becomes a real problem that causes loss of time, increasing pollution and traffic. According to the insurer Allianz in industrialized
Performance Measure Summary - Pensacola FL-AL. Performance Measures and Definition of Terms
 Performance Measure Summary - Pensacola FL-AL There are several inventory and performance measures listed in the pages of this Urban Area Report for the years from 1982 to 2014. There is no single performance
Performance Measure Summary - Pensacola FL-AL There are several inventory and performance measures listed in the pages of this Urban Area Report for the years from 1982 to 2014. There is no single performance
Background. Speed Prediction in Work Zones Using the SHRP 2 Naturalistic Driving Study Data
 Speed Prediction in Work Zones Using the SHRP 2 Naturalistic Driving Study Data Minnesota Towards Zero Deaths Conference October 2017 Shauna Hallmark, Amrita Goswamy, Omar Smadi, Sue Chrysler Background
Speed Prediction in Work Zones Using the SHRP 2 Naturalistic Driving Study Data Minnesota Towards Zero Deaths Conference October 2017 Shauna Hallmark, Amrita Goswamy, Omar Smadi, Sue Chrysler Background
Comprehensive Regional Goods Movement Plan and Implementation Strategy Goods Movement in the 2012 RTP/SCS
 Comprehensive Regional Goods Movement Plan and Implementation Strategy Goods Movement in the 2012 RTP/SCS Annie Nam Southern California Association of Governments September 24, 2012 The Goods Movement
Comprehensive Regional Goods Movement Plan and Implementation Strategy Goods Movement in the 2012 RTP/SCS Annie Nam Southern California Association of Governments September 24, 2012 The Goods Movement
Automated Driving: Design and Verify Perception Systems
 Automated Driving: Design and Verify Perception Systems Giuseppe Ridinò 2015 The MathWorks, Inc. 1 Some common questions from automated driving engineers 1011010101010100101001 0101010100100001010101 0010101001010100101010
Automated Driving: Design and Verify Perception Systems Giuseppe Ridinò 2015 The MathWorks, Inc. 1 Some common questions from automated driving engineers 1011010101010100101001 0101010100100001010101 0010101001010100101010
Driver Monitoring System for Enhancing Road Safety
 Driver Monitoring System for Enhancing Road Safety Raksit THITIPATANAPONG Engineering Fellow, Smart Mobility Research Center Faculty of Engineering, Chulalongkorn University. smartmobility.cu@gmail.com
Driver Monitoring System for Enhancing Road Safety Raksit THITIPATANAPONG Engineering Fellow, Smart Mobility Research Center Faculty of Engineering, Chulalongkorn University. smartmobility.cu@gmail.com
Smart Control for Electric/Autonomous Vehicles
 Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
VEHICLE COUNTING AND VEHICLE SPEED MEASUREMENT BASED ON VIDEO PROCESSING
 VEHICLE COUNTING AND VEHICLE SPEED MEASUREMENT BASED ON VIDEO PROCESSING 1 HARDY SANTOSA SUNDORO, 2 AGUS HARJOKO 1,2 Department of Computer Science and Electronics Universitas Gadjah Mada, Indonesia E-mail:
VEHICLE COUNTING AND VEHICLE SPEED MEASUREMENT BASED ON VIDEO PROCESSING 1 HARDY SANTOSA SUNDORO, 2 AGUS HARJOKO 1,2 Department of Computer Science and Electronics Universitas Gadjah Mada, Indonesia E-mail:
A Communication-centric Look at Automated Driving
 A Communication-centric Look at Automated Driving Onur Altintas Toyota ITC Fellow Toyota InfoTechnology Center, USA, Inc. November 5, 2016 IEEE 5G Summit Seattle Views expressed in this talk do not necessarily
A Communication-centric Look at Automated Driving Onur Altintas Toyota ITC Fellow Toyota InfoTechnology Center, USA, Inc. November 5, 2016 IEEE 5G Summit Seattle Views expressed in this talk do not necessarily
LTU Challenger. TEAM MEMBERS: Andrey Chernolutskiy Vincent Shih-Nung Chen. Faculty Advisor's Statement:
 LTU Challenger TEAM MEMBERS: Andrey Chernolutskiy Vincent Shih-Nung Chen Faculty Advisor's Statement: The work that the LTU Challenger student team performed with regards to design and implementation was
LTU Challenger TEAM MEMBERS: Andrey Chernolutskiy Vincent Shih-Nung Chen Faculty Advisor's Statement: The work that the LTU Challenger student team performed with regards to design and implementation was
Understanding Transit-Oriented Development (TOD) and Transit-Adjacent Development (TAD)
 and Transit-Adjacent Development (TAD)") Understanding Transit-Oriented Development (TOD) and Transit-Adjacent Development (TAD) Reid Ewing, Guang Tian, and Keunhyun Park Metropolitan Research Center Department of City and Metropolitan Planning
Understanding Transit-Oriented Development (TOD) and Transit-Adjacent Development (TAD) Reid Ewing, Guang Tian, and Keunhyun Park Metropolitan Research Center Department of City and Metropolitan Planning
Engineering Dept. Highways & Transportation Engineering
 The University College of Applied Sciences UCAS Engineering Dept. Highways & Transportation Engineering (BENG 4326) Instructors: Dr. Y. R. Sarraj Chapter 4 Traffic Engineering Studies Reference: Traffic
The University College of Applied Sciences UCAS Engineering Dept. Highways & Transportation Engineering (BENG 4326) Instructors: Dr. Y. R. Sarraj Chapter 4 Traffic Engineering Studies Reference: Traffic
Accident Reconstruction & Vehicle Data Recovery Systems and Uses
 Research Engineers, Inc. (919) 781-7730 7730 Collision Analysis Engineering Animation Accident Reconstruction & Vehicle Data Recovery Systems and Uses Bill Kluge Thursday, May 21, 2009 Accident Reconstruction
Research Engineers, Inc. (919) 781-7730 7730 Collision Analysis Engineering Animation Accident Reconstruction & Vehicle Data Recovery Systems and Uses Bill Kluge Thursday, May 21, 2009 Accident Reconstruction
INTERNATIONAL JOURNAL OF PURE AND APPLIED RESEARCH IN ENGINEERING AND TECHNOLOGY
 INTERNATIONAL JOURNAL OF PURE AND APPLIED RESEARCH IN ENGINEERING AND TECHNOLOGY A PATH FOR HORIZING YOUR INNOVATIVE WORK DESIGN AND IMPLIMENTATION OF NOVEL APPROACH FOR TRAFFIC CONTROL SYSTEM PROF. ANIKET
INTERNATIONAL JOURNAL OF PURE AND APPLIED RESEARCH IN ENGINEERING AND TECHNOLOGY A PATH FOR HORIZING YOUR INNOVATIVE WORK DESIGN AND IMPLIMENTATION OF NOVEL APPROACH FOR TRAFFIC CONTROL SYSTEM PROF. ANIKET
Intelligent Fault Analysis in Electrical Power Grids
 Intelligent Fault Analysis in Electrical Power Grids Biswarup Bhattacharya (University of Southern California) & Abhishek Sinha (Adobe Systems Incorporated) 2017 11 08 Overview Introduction Dataset Forecasting
Intelligent Fault Analysis in Electrical Power Grids Biswarup Bhattacharya (University of Southern California) & Abhishek Sinha (Adobe Systems Incorporated) 2017 11 08 Overview Introduction Dataset Forecasting
Automatic Car Driving System Using Fuzzy Logic
 Automatic Car Driving System Using Fuzzy Logic Vipul Shinde, Rohan Thorat, Trupti Agarkar B.E Electronics, RamraoAdik Institute of Technology, Nerul, Navi Mumbai. ABSTRACT: In Boolean logic the truth-value
Automatic Car Driving System Using Fuzzy Logic Vipul Shinde, Rohan Thorat, Trupti Agarkar B.E Electronics, RamraoAdik Institute of Technology, Nerul, Navi Mumbai. ABSTRACT: In Boolean logic the truth-value
AN The SmartSensor HD as an Automatic Traffic Recorder. Automatic Traffic Recorders
 AN-0006 The SmartSensor HD as an Automatic Traffic Recorder The Wavetronix SmartSensor HD can be used as an automatic traffic recorder (ATR) in the process of gathering, storing and analyzing traffic data.
AN-0006 The SmartSensor HD as an Automatic Traffic Recorder The Wavetronix SmartSensor HD can be used as an automatic traffic recorder (ATR) in the process of gathering, storing and analyzing traffic data.
Auc2Charge: An Online Auction Framework for Electric Vehicle Park-and-Charge
 Auc2Charge: An Online Auction Framework for Electric Vehicle Park-and-Charge Qiao Xiang 1, Fanxin Kong 1, Xue Liu 1, Xi Chen 1, Linghe Kong 1 and Lei Rao 2 1 School of Computer Science, McGill University
Auc2Charge: An Online Auction Framework for Electric Vehicle Park-and-Charge Qiao Xiang 1, Fanxin Kong 1, Xue Liu 1, Xi Chen 1, Linghe Kong 1 and Lei Rao 2 1 School of Computer Science, McGill University
Technical Memorandum Analysis Procedures and Mobility Performance Measures 100 Most Congested Texas Road Sections What s New for 2015
 Technical Memorandum Analysis Procedures and Mobility Performance Measures 100 Most Congested Texas Road Sections Prepared by Texas A&M Transportation Institute August 2015 This memo documents the analysis
Technical Memorandum Analysis Procedures and Mobility Performance Measures 100 Most Congested Texas Road Sections Prepared by Texas A&M Transportation Institute August 2015 This memo documents the analysis
Planning T(r)ips for Hybrid Electric Vehicles
ips for Hybrid Electric Vehicles") Planning T(r)ips for Hybrid Electric Vehicles How to Drive in the 21st Century 16.S949 Student Lecture May 14 th, 2012 Example Origin: Sid-Pac Destination: Revere St. Meet Peng in 4 minutes. Need to find
Planning T(r)ips for Hybrid Electric Vehicles How to Drive in the 21st Century 16.S949 Student Lecture May 14 th, 2012 Example Origin: Sid-Pac Destination: Revere St. Meet Peng in 4 minutes. Need to find
Route truck by fuel stops? Spread gap by historical proration of fleet/of truck? Spread gap based on current travel history of truck? Other?
 Truck 302 GPS Vendor 3 and Traditional Fuel receipts GPS Vendor 3 reports chronologically as truck travels the distance by state with odometer readings at the entry and exit of every state and the lat/lon
Truck 302 GPS Vendor 3 and Traditional Fuel receipts GPS Vendor 3 reports chronologically as truck travels the distance by state with odometer readings at the entry and exit of every state and the lat/lon
The Environment. The Environment
 Based on its slogan of "Protecting lives, Preserving the planet, and Preparing a bright future for generations to come," DENSO is engaged in the mission of solving the environmental and safety issues automotive
Based on its slogan of "Protecting lives, Preserving the planet, and Preparing a bright future for generations to come," DENSO is engaged in the mission of solving the environmental and safety issues automotive
Energy and Automation Workshop E1: Impacts of Connectivity and Automation on Vehicle Operations
 Energy and Automation Workshop E1: Impacts of Connectivity and Automation on Vehicle Operations Ben Saltsman Engineering Manager Intelligent Truck, Vehicle Technology & Innovation April 23, 2014 Comprehensive
Energy and Automation Workshop E1: Impacts of Connectivity and Automation on Vehicle Operations Ben Saltsman Engineering Manager Intelligent Truck, Vehicle Technology & Innovation April 23, 2014 Comprehensive
Trafiksimulering av självkörande fordon hur kan osäkerheter gällande körbeteende och heterogenitet hanteras
 Trafiksimulering av självkörande fordon hur kan osäkerheter gällande körbeteende och heterogenitet hanteras CTR-dagen 2018, Stockholm Johan Olstam Agenda What is an automated vehicle? Challenges for traffic
Trafiksimulering av självkörande fordon hur kan osäkerheter gällande körbeteende och heterogenitet hanteras CTR-dagen 2018, Stockholm Johan Olstam Agenda What is an automated vehicle? Challenges for traffic
Recent Transportation Projects
 Dr. Dazhi Sun Associate Professor Director of Texas Transportation Institute Regional Division Department of Civil & Architectural Engineering Texas A&M University-Kingsville 1 Recent Transportation Projects
Dr. Dazhi Sun Associate Professor Director of Texas Transportation Institute Regional Division Department of Civil & Architectural Engineering Texas A&M University-Kingsville 1 Recent Transportation Projects
From Developing Credit Risk Models Using SAS Enterprise Miner and SAS/STAT. Full book available for purchase here.
 From Developing Credit Risk Models Using SAS Enterprise Miner and SAS/STAT. Full book available for purchase here. About this Book... ix About the Author... xiii Acknowledgments...xv Chapter 1 Introduction...
From Developing Credit Risk Models Using SAS Enterprise Miner and SAS/STAT. Full book available for purchase here. About this Book... ix About the Author... xiii Acknowledgments...xv Chapter 1 Introduction...
An Introduction to Automated Vehicles
 An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
ACCIDENT MODIFICATION FACTORS FOR MEDIAN WIDTH
 APPENDIX G ACCIDENT MODIFICATION FACTORS FOR MEDIAN WIDTH INTRODUCTION Studies on the effect of median width have shown that increasing width reduces crossmedian crashes, but the amount of reduction varies
APPENDIX G ACCIDENT MODIFICATION FACTORS FOR MEDIAN WIDTH INTRODUCTION Studies on the effect of median width have shown that increasing width reduces crossmedian crashes, but the amount of reduction varies
The Role of Infrastructure Connected to Cars & Autonomous Driving INFRAMIX PROJECT
 The Role of Infrastructure Connected to Cars & Autonomous Driving INFRAMIX PROJECT 20-11-18 1 Index 01 Abertis Autopistas 02 Introduction 03 Road map AV 04 INFRAMIX project 05 Test site autopistas 06 Classification
The Role of Infrastructure Connected to Cars & Autonomous Driving INFRAMIX PROJECT 20-11-18 1 Index 01 Abertis Autopistas 02 Introduction 03 Road map AV 04 INFRAMIX project 05 Test site autopistas 06 Classification
Modeling Driver Behavior in a Connected Environment Integration of Microscopic Traffic Simulation and Telecommunication Systems.
 Modeling Driver Behavior in a Connected Environment Integration of Microscopic Traffic Simulation and Telecommunication Systems Alireza Talebpour Information Level Connectivity in the Modern Age Sensor
Modeling Driver Behavior in a Connected Environment Integration of Microscopic Traffic Simulation and Telecommunication Systems Alireza Talebpour Information Level Connectivity in the Modern Age Sensor
VeMo: Enabling Transparent Vehicular Mobility Modeling at Individual Levels with Full Penetration
 VeMo: Enabling Transparent Vehicular Mobility Modeling at Individual Levels with Full Penetration Yu Yang Rutgers Unversity yy388@cs.rutgers.edu Xiaoyang Xie Rutgers Unversity xx88@cs.rutgers.edu Zhihan
VeMo: Enabling Transparent Vehicular Mobility Modeling at Individual Levels with Full Penetration Yu Yang Rutgers Unversity yy388@cs.rutgers.edu Xiaoyang Xie Rutgers Unversity xx88@cs.rutgers.edu Zhihan
Introduction and Background Study Purpose
 Introduction and Background The Brent Spence Bridge on I-71/75 across the Ohio River is arguably the single most important piece of transportation infrastructure the Ohio-Kentucky-Indiana (OKI) region.
Introduction and Background The Brent Spence Bridge on I-71/75 across the Ohio River is arguably the single most important piece of transportation infrastructure the Ohio-Kentucky-Indiana (OKI) region.
A Device for Sorting and Recycling Dry Batteries Automatically Jiahang Xia
 Advances in Computer Science Research (ACSR), volume 73 7th International Conference on Education, Management, Information and Computer Science (ICEMC 2017) A Device for Sorting and Recycling Dry Batteries
Advances in Computer Science Research (ACSR), volume 73 7th International Conference on Education, Management, Information and Computer Science (ICEMC 2017) A Device for Sorting and Recycling Dry Batteries