Connected and Automated Vehicles (CAVs): Challenges and Opportunities for Traffic Operations
|
|
|
- Bryce Johnston
- 5 years ago
- Views:
Transcription
: Challenges and")


1 NTUA Seminar Connected and Automated Vehicles (CAVs): Challenges and Opportunities for Traffic Operations Toronto, 1959 Los Angeles, 2009 Alexander Skabardonis NTUA 1977, University of California, Berkeley Athens, May 31, 2018
* *Source: Steven")
2 History of Automated Driving (pre-google)* *Source: Steven Shladover, PATH


3 Background: AHS Implementation Dedicated AHS lanes Automated Check-in Automated Check-out Lateral and Longitudinal Controls Automated merging/diverging Malfunction Management & Analysis AHS Demo: San Diego 1997

4 Capacity of AHS Lane 8

5 The Promise.. Automation Connected Veh ATM 4

6 Levels of Automation (1)

7 Levels of Automation (2)

8 CAVs: Modeling Needs Source: Srinivas Peeta Workshop ISTTT22, 2017

9 CAVs: Modeling Challenges
10 Models: Challenges and Opportunities (1) Existing Traffic Models Luck Features to Account for Changes due to CAVs Simplified assumptions on CAVs car-following, lane changing models Car-following model for mixed traffic Interactions with manual driven vehicles Macroscopic traffic flow relationships New Models Needed to Leverage Technological capabilities, and Capture Emergent Interactions Operational and communication protocols Modeling platoon streams for CAVs Platoon stability Impacts of latency 6
11 Models: Challenges and Opportunities (2) Modeling of CAVs and Technology Integration (V2X) Traffic signal control ATM strategies on freeways Highway design for mixed and purely autonomous vehicles Modeling Incidents/Re-routing Diversion strategies under cooperation and real-time information available to CAVs Model Calibration Data sources? Framework? 7
12 Data Opportunities-Challenges CAVs can be used as mobile sensors CAVs provide data for trajectory construction Current TMC systems are not equipped to handle CAV data Minimizing data transmission/processing costs while maintaining accuracy and timeliness requirements No standards/procedures exist for collecting, processing integrating CAV data into existing operations CAV Operational Characteristics not yet determined Effect of advance information on CAVs is unknown until tested Impacts on intersection capacity and performance depend on CAVs penetration rate (will change over time) 11
13 Impact of Penetration Rates* Perfect information, p = 100% p = 50% Space (m) Space (m) Time (s) Time (s) p = 25% p = 10% Space (m) Space (m) Time (s) Time (s) *NGSIM Data

14 Cooperative Adaptive Cruise Control (CACC) Field Experiments CACC Users accept short gaps

15 Modeling ACC/CACC Vehicles* Field Data on ACC and CACC operation Improved Car Following Lane Changing Models Reproduce Accurately Field Conditions *PATH, US DOE & FHWA Research

16 Merging Throughput with CACC
 V: Each vehicle a sensor Here I")
17 CAV Applications: Traffic Signals (1) V: Each vehicle a sensor Here I am
18 CAV Applications: Traffic Signals (2) V2I V: vehicles here I am I: intersection: SpaT Message Operational Characteristics Lost time reduction Increased saturation flow rate Control Strategies Multimodal adaptive control Dynamic lane allocation Eco Driving Signal-Free Intersections
19 CAVs: Capacity & Delay at Traffic Signals Issues: o CAVs Penetration Rate o Differences in driving behaviour of (N) and (CAV) o Relative Position of N and CAV o Complicated dynamics of car following situations Ramezani, M., J.A. Machago, A. Skabardonis, N. Geroliminis, Capacity and Delay Analysis of Arterials with Mixed Autonomous and Human-Driven Vehicles, 5 th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems, Napoli, Italy, June 2017.

20 CAVs: Saturation Headway (1)
21 CAVs: Saturation Headway (2) Upper Bound of Vehicle Headway


22 CAVs: Saturation Headway (3) Expected Vehicle Headway
23 CAVs: Saturation Headway (4) Expected Vehicle Headway Example (cont.)
24 CAVs: Saturation Headway (5) Expected, upper and lower bounds of mixed flow headway validation of theoretically obtained headways using microsimulation
25 Delay at an Arterial Signalized Link (1) Scenarios i. mixed lanes ii. dedicated lanes for AV and N iii. one mixed lane and one AV dedicated lane iv. one mixed lane and one N dedicated lane
26 Delay at an Arterial Signalized Link (2) i. dedicated lanes for AV and N (cont..)
27 Delay at an Arterial Signalized Link (3) 6
28 Eco-Driving: Background (1) Importance of Vehicle Activity Modal vs. Average Speed based Emission/Fuel Estimates
 Impacts of Traffic")

29 Eco-Driving: Background (2) Impacts of Traffic Conditions & Operations Undersaturated Oversaturated

30 Uncertainty on CAVs Impacts on Energy & Emissions
31 US DOE Initiative
 Dynamic Speed Advisory Speed recommendation Countdown *PATH, FHWA Exploratory Advanced")
32 Field Test: Eco-Driving at Intersections* Inputs Here I am V2I safety mesage Signal Phase & Timing (SPaT) Dynamic Speed Advisory Speed recommendation Countdown *PATH, FHWA Exploratory Advanced Research

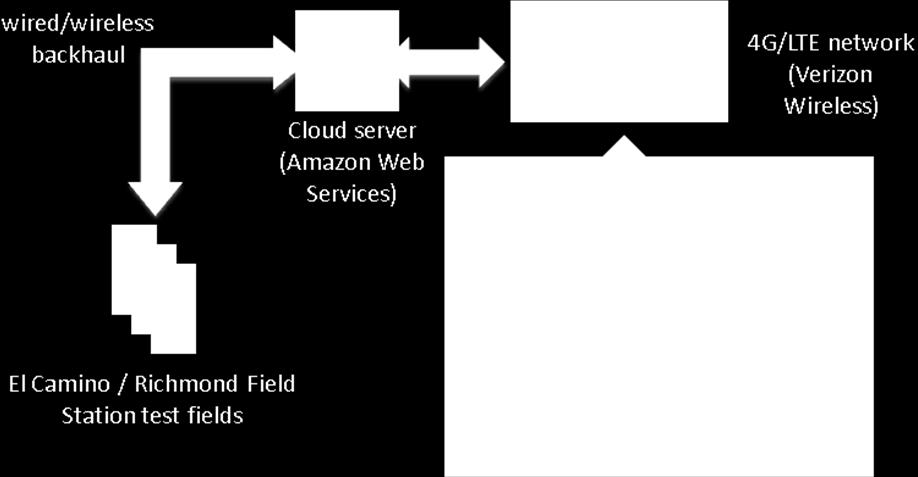
33 Field Test: Communication System



34 BMW Research Vehicle Speed recommendation Countdown
35 Field Test: Scenarios 1. Uninformed Driver (Baseline Scenario) 2. Informed Driver - Driver Follows speed-recommendation 3. Individual Vehicle Priority & Informed Driver - Driver Follows speed-recommendation - intersection adapts timing with individual vehicle priority 4. Individual Vehicle Priority & Uninformed Driver - intersection adapts timing with individual vehicle priority 35
36 Field Test: Results (1) Uninformed Driver Informed Driver APIV Uninformed APIV & Informed Number of Test Runs Stop Frequency (%) % Change % % % Mean Stopped Time (sec) % Change % % % Travel Time (sec/trip) % Change % % % Fuel (l/100km) % Change % % %
37 Field Test: Results (2)
38 Field Test: Results (3) 38

39 Arterial Field Test: El Camino Real

40 Algorithm Overview (1)
41 Frequency of Speed Changes--Compliance Implementation Challenges Green Window is not Fixed Need for Speed Prediction at successive Intersections Interactions with In-Informed Traffic
42 Dynamic Lane Allocation/Grouping (DLG) Problem Given real-time O-D demands at a signalized intersection, determine the lane assignment in real-time to improve performance Approach For each intersection leg find the optimum lane grouping St: Minimize the max lane flow ratio y (y = flow/saturation flow) Allowable movements (safety constraints) Sub-problem: Determine the steady state traffic flow among lanes within each lane group also
43 DLG Impacts: Max Lane Flow Ratio/Lane Under DLG, max lane flow ratio always keeps as low as Maximum flow ratio max y i,j Fixed-Lane Grouping fixed lane grouping Q(1,TH) / j Q(1,j) DLG: Min Max DLG based on minmax flow ratio flow ratio Q Q(1,LT) / j Q(1,j)
44 DLG Impacts: Average Delay 160 Average Delay (sec/veh) FIXED DLG % Left Turns
45 Public Agencies: Planning & Operations Analyses What link capacity to use in 2030 transpoartation plan? What are the impacts on operational performance (reliability) What will be the market penetration of CAVs? Do I need traffic lights? Highway Capacity Manual Procedures Use of adjustment factors Example: Critical Intersection control strategy improves intersection capacity by 7% Based on field data Source of Factors Field data (not yet available) Simulation (assumptions)

46 Implementation Challenges Background: Initial Deployment Plans Planned V2I Deployment in 2006: 250,000 signals # of intersections Today: Planned XXX US VII Deployment 06 FleetNet 03
47 The Safety Challenge Human Drivers in the U.S (2015) 500,000 miles driven between crashes (approximately 1.9 years) 1.8 million miles driven between injury crashes 98 million miles driven between fatal crashes (approximately 370 years of operation between extreme failures) Automated Vehicles AV rate is 40K miles per accident Waymo rate is 5.5K miles per disengagement Waymo accident (disengagement) rate is 13 (100) times worse than human drivers. Disengagement: a failure of the technology is detected, or when the safe operation of the vehicle requires that the driver take over manual control.
48 US Legislation STATE / CONTENT Definitions / Committee on CAVs Testing Platooning Public Operation Liability Issues Bill, Year Alabama X SJR 81, 2016 Arkansas X X X X HB 1754, 2017 California X X X X SB 1298, 2012 / AB 1592, 2016 / AB 669, 2017 / AB 1444, 2017 / SB 145, 2017 Colorado X X X SB 213, 2017 Connecticut X X X SB 260, 2017 Florida X X X X X HB 1207, 2012 / HB 599, 2012 / HB 7027, 2016 / HB 7061, 2016 Georgia X X X HB 472, 2017 / SB 219, 2017 Illinois X HB 791, 2017 Louisiana X HB 1143, 2016 Michigan X X X X X SB 996, 2016 / SB 997, 2016 / SB 998, 2016 / SB 169, 2013 / SB 663,2013 Nevada X X X X X AB 511, 2011 / SB 140, 2011 / SB 313, 2013 / AB 69, 2017 New York X X SB 2005, 2017 North Carolina X X X HB 469, 2017 / HB 716, 2017 North Dakota X HB 1065, 2015 / HB 1202, 2017 South Carolina X X HB 3289, 2017 Tennessee X X X X X SB 598, 2015 / SB 2333, 2016 / SB 1561, 2016 / SB 676, 2017 / SB 151, 2017 Texas X X X X HB 1791, 2017 / SB 2205, 2017 Utah X X HB 373, 2015 / HB 280, 2016 Vermont X HB 494, 2017 Washington, D.C. X X DC B , 2012
49 USDOT Activities USDOT Strategic Priorities Safety Infrastructure Technology and Innovation Reducing Regulatory Burden Connected Vehicles Test Beds Safety Pilot --Michigan Mobility Wyoming Tampa New York

50 Safety Pilot 2836 Vehicles

51 Estimate of Market Introduction* *Steve Shladover, PATH Program
52 NTUA Seminar Connected and Automated Vehicles (CAVs): Challenges and Opportunities for Traffic Operations Toronto, 1959 Los Angeles, 2009 Alexander Skabardonis NTUA 1977, University of California, Berkeley Athens, May 31, 2018
Traffic Operations with Connected and Automated Vehicles
 Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
AUTONOMOUS VEHICLES AND THE TRUCKING INDUSTRY
 AUTONOMOUS VEHICLES AND THE TRUCKING INDUSTRY Presentation for the Maine State Agencies Working Group on Connected and Autonomous Vehicles August 14, 2017 Brian Parke bparke@mmta.com Tim Doyle timd@mmta.com
AUTONOMOUS VEHICLES AND THE TRUCKING INDUSTRY Presentation for the Maine State Agencies Working Group on Connected and Autonomous Vehicles August 14, 2017 Brian Parke bparke@mmta.com Tim Doyle timd@mmta.com
Future Vehicle Safety: Connected, Cooperative, or Autonomous? Christopher Poe, Ph.D., P.E. Assistant Agency Director
 Future Vehicle Safety: Connected, Cooperative, or Autonomous? Christopher Poe, Ph.D., P.E. Assistant Agency Director TexITE Meeting August 30, 2012 Presentation Outline Connected Vehicle Program Connected
Future Vehicle Safety: Connected, Cooperative, or Autonomous? Christopher Poe, Ph.D., P.E. Assistant Agency Director TexITE Meeting August 30, 2012 Presentation Outline Connected Vehicle Program Connected
Partial Automation for Truck Platooning
 Partial Automation for Truck Platooning Observations and Lessons Learned to Date from California's Experience with Truck Platooning Matt Hanson 2017 ITS CA Conference September 18, 2017 Burlingame, CA
Partial Automation for Truck Platooning Observations and Lessons Learned to Date from California's Experience with Truck Platooning Matt Hanson 2017 ITS CA Conference September 18, 2017 Burlingame, CA
Fleet Penetration of Automated Vehicles: A Microsimulation Analysis
 Fleet Penetration of Automated Vehicles: A Microsimulation Analysis Corresponding Author: Elliot Huang, P.E. Co-Authors: David Stanek, P.E. Allen Wang 2017 ITE Western District Annual Meeting San Diego,
Fleet Penetration of Automated Vehicles: A Microsimulation Analysis Corresponding Author: Elliot Huang, P.E. Co-Authors: David Stanek, P.E. Allen Wang 2017 ITE Western District Annual Meeting San Diego,
Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts
 Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts Office of Analysis, Research, and Technology Federal Motor Carrier Safety Administration Managing Fatigue Conference Mar
Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts Office of Analysis, Research, and Technology Federal Motor Carrier Safety Administration Managing Fatigue Conference Mar
What do autonomous vehicles mean to traffic congestion and crash? Network traffic flow modeling and simulation for autonomous vehicles
 What do autonomous vehicles mean to traffic congestion and crash? Network traffic flow modeling and simulation for autonomous vehicles FINAL RESEARCH REPORT Sean Qian (PI), Shuguan Yang (RA) Contract No.
What do autonomous vehicles mean to traffic congestion and crash? Network traffic flow modeling and simulation for autonomous vehicles FINAL RESEARCH REPORT Sean Qian (PI), Shuguan Yang (RA) Contract No.
Safety Considerations of Autonomous Vehicles. Darren Divall Head of International Road Safety TRL
 Safety Considerations of Autonomous Vehicles Darren Divall Head of International Road Safety TRL TRL History Autonomous Vehicles TRL Self-driving car, 1960s Testing partial automation, TRL, 2000s Testing
Safety Considerations of Autonomous Vehicles Darren Divall Head of International Road Safety TRL TRL History Autonomous Vehicles TRL Self-driving car, 1960s Testing partial automation, TRL, 2000s Testing
Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications
 Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications Jiaqi Ma Assistant Professor University of Cincinnati ITS Midwest Annual Meeting Columbus, Ohio, September 29, 2017 Outline
Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications Jiaqi Ma Assistant Professor University of Cincinnati ITS Midwest Annual Meeting Columbus, Ohio, September 29, 2017 Outline
A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications
 Systems: Architectures, Controls, and Applications") A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications Ziran Wang (presenter), Guoyuan Wu, and Matthew J. Barth University of California, Riverside Nov.
A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications Ziran Wang (presenter), Guoyuan Wu, and Matthew J. Barth University of California, Riverside Nov.
Traffic Management through C-ITS and Automation: a perspective from the U.S.
 Traffic Management through C-ITS and Automation: a perspective from the U.S. Matthew Barth University of California-Riverside Yeager Families Professor Director, Center for Environmental Research and Technology
Traffic Management through C-ITS and Automation: a perspective from the U.S. Matthew Barth University of California-Riverside Yeager Families Professor Director, Center for Environmental Research and Technology
TRAFFIC VOLUME TRENDS July 2002
 TRAFFIC VOLUME TRENDS July 2002 Travel on all roads and streets changed by +2.3 percent for July 2002 as compared to July 2001. Estimated Vehicle-Miles of Travel by Region - July 2002 - (in Billions) West
TRAFFIC VOLUME TRENDS July 2002 Travel on all roads and streets changed by +2.3 percent for July 2002 as compared to July 2001. Estimated Vehicle-Miles of Travel by Region - July 2002 - (in Billions) West
Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System
 System") Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System 2017 Los Angeles Environmental Forum August 28th Ziran Wang ( 王子然 ), Guoyuan Wu, Peng Hao, Kanok Boriboonsomsin, and Matthew
Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System 2017 Los Angeles Environmental Forum August 28th Ziran Wang ( 王子然 ), Guoyuan Wu, Peng Hao, Kanok Boriboonsomsin, and Matthew
Convergence: Connected and Automated Mobility
 Convergence: Connected and Automated Mobility Peter Sweatman Principal, CAVita LLC, Anaheim CA AASHTO CTE Denver June 19, 2018 1 Agenda New technology in mobility: CV, AV and CAV The transformational dynamic
Convergence: Connected and Automated Mobility Peter Sweatman Principal, CAVita LLC, Anaheim CA AASHTO CTE Denver June 19, 2018 1 Agenda New technology in mobility: CV, AV and CAV The transformational dynamic
MMWR 1 Expanded Table 1. Persons living with diagnosed. Persons living with undiagnosed HIV infection
 MMWR 1 Expanded Table 1 Expanded Table 1. Estimated* number of persons aged 13 years with (diagnosed and undiagnosed), and percentage of those with diagnosed, by jurisdiction and year United States, 2008
MMWR 1 Expanded Table 1 Expanded Table 1. Estimated* number of persons aged 13 years with (diagnosed and undiagnosed), and percentage of those with diagnosed, by jurisdiction and year United States, 2008
Eco-Signal Operations Concept of Operations
 Eco-Signal Operations Concept of Operations Applications for the Environment: Real-Time Information Synthesis (AERIS) Adapted from the Eco-Signal Operations Concept of Operations Document AERIS Operational
Eco-Signal Operations Concept of Operations Applications for the Environment: Real-Time Information Synthesis (AERIS) Adapted from the Eco-Signal Operations Concept of Operations Document AERIS Operational
Manufactured Home Shipments by Product Mix ( )
") Manufactured Home Shipments by Product Mix (1990-2014) Data Source: Institute for Building Technology and Safety (IBTS) * "Destination Pending" represents month-end finished home inventory at a plant.
Manufactured Home Shipments by Product Mix (1990-2014) Data Source: Institute for Building Technology and Safety (IBTS) * "Destination Pending" represents month-end finished home inventory at a plant.
Modeling Driver Behavior in a Connected Environment Integration of Microscopic Traffic Simulation and Telecommunication Systems.
 Modeling Driver Behavior in a Connected Environment Integration of Microscopic Traffic Simulation and Telecommunication Systems Alireza Talebpour Information Level Connectivity in the Modern Age Sensor
Modeling Driver Behavior in a Connected Environment Integration of Microscopic Traffic Simulation and Telecommunication Systems Alireza Talebpour Information Level Connectivity in the Modern Age Sensor
G4 Apps. Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013
 Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013 Reducing costs, emissions. Improving mobility, efficiency. Safe Broadband Wireless Operations Fusion: Vehicles-Agencies Technologies,
Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013 Reducing costs, emissions. Improving mobility, efficiency. Safe Broadband Wireless Operations Fusion: Vehicles-Agencies Technologies,
TRAFFIC CONTROL. in a Connected Vehicle World
 TRAFFIC CONTROL in a Connected Vehicle World Preparing for the advent of Connected Vehicles and their impact on traffic management and signalized intersection control. Frank Provenzano, Director of Business
TRAFFIC CONTROL in a Connected Vehicle World Preparing for the advent of Connected Vehicles and their impact on traffic management and signalized intersection control. Frank Provenzano, Director of Business
Intelligent Vehicle Systems
 Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
Advanced Traffic Management on Arterial Corridors with Connected and Automated Vehicles
 Advanced Traffic Management on Arterial Corridors with Connected and Automated Vehicles Outline: November 18, 2015 Matthew Barth Yeager Families Chair Director, Center for Environmental Research and Technology
Advanced Traffic Management on Arterial Corridors with Connected and Automated Vehicles Outline: November 18, 2015 Matthew Barth Yeager Families Chair Director, Center for Environmental Research and Technology
Road Vehicle Automation: Distinguishing Reality from Hype
 Road Vehicle Automation: Distinguishing Reality from Hype Steven E. Shladover, Sc.D. California PATH Program University of California, Berkeley March 20, 2014 1 Outline Historical development of automation
Road Vehicle Automation: Distinguishing Reality from Hype Steven E. Shladover, Sc.D. California PATH Program University of California, Berkeley March 20, 2014 1 Outline Historical development of automation
Beyond ATC and ITS Standards. Edward Fok USDOT/FHWA - RESOURCE CENTER San Francisco
 Beyond ATC and ITS Standards Edward Fok USDOT/FHWA - RESOURCE CENTER San Francisco May, 2014 Signal Control is only the beginning Connected Vehicles Automated Vehicles Infrastructure Data: Fully Connected
Beyond ATC and ITS Standards Edward Fok USDOT/FHWA - RESOURCE CENTER San Francisco May, 2014 Signal Control is only the beginning Connected Vehicles Automated Vehicles Infrastructure Data: Fully Connected
TRAFFIC VOLUME TRENDS
 Page 1 U. S. Department Transportation Federal Highway Administration Office Highway Policy Information TRAFFIC VOLUME TRENDS September Travel on all roads and streets changed by +2.5 (5.8 billion vehicle
Page 1 U. S. Department Transportation Federal Highway Administration Office Highway Policy Information TRAFFIC VOLUME TRENDS September Travel on all roads and streets changed by +2.5 (5.8 billion vehicle
PERFORMANCE BENEFITS OF CONNECTED VEHICLES FOR IMPLEMENTING SPEED HARMONIZATION
 PERFORMANCE BENEFITS OF CONNECTED VEHICLES FOR IMPLEMENTING SPEED HARMONIZATION Richard Dowling, Brandon Nevers, Anxi Jia, Alexander Skabardonis Kittelson & Associates Cory Krause, Meenakshy Vasudevan
PERFORMANCE BENEFITS OF CONNECTED VEHICLES FOR IMPLEMENTING SPEED HARMONIZATION Richard Dowling, Brandon Nevers, Anxi Jia, Alexander Skabardonis Kittelson & Associates Cory Krause, Meenakshy Vasudevan
Dr. Mohamed Abdel-Aty, P.E. Connected-Autonomous Vehicles (CAV): Background and Opportunities. Trustee Chair
: Background and Opportunities. Trustee Chair") Connected-Autonomous Vehicles (CAV): Background and Opportunities Dr. Mohamed Abdel-Aty, P.E. Trustee Chair Pegasus Professor Chair, Dept. of Civil, Environmental & Construction Engineering University
Connected-Autonomous Vehicles (CAV): Background and Opportunities Dr. Mohamed Abdel-Aty, P.E. Trustee Chair Pegasus Professor Chair, Dept. of Civil, Environmental & Construction Engineering University
APCO International. Emerging Technology Forum
 APCO International Emerging Technology Forum Emerging Vehicle to Vehicle, Vehicle to Infrastructure Communications Cars talking to each other and talking to the supporting highway infrastructure The Regulatory
APCO International Emerging Technology Forum Emerging Vehicle to Vehicle, Vehicle to Infrastructure Communications Cars talking to each other and talking to the supporting highway infrastructure The Regulatory
Technology for Transportation s Future
 Technology for Transportation s Future Shelley Row Director, ITS Joint Program Office Research and Innovative Technology Administration U.S. Department of Transportation National Conference of State Legislatures
Technology for Transportation s Future Shelley Row Director, ITS Joint Program Office Research and Innovative Technology Administration U.S. Department of Transportation National Conference of State Legislatures
Connected and Automated Vehicle Activities in the United States
 U.S. Department of Transportation Connected and Automated Vehicle Activities in the United States SIP-adus Workshop on Connected and Automated Driving Systems Kevin Dopart Automation Program Manager, U.S.
U.S. Department of Transportation Connected and Automated Vehicle Activities in the United States SIP-adus Workshop on Connected and Automated Driving Systems Kevin Dopart Automation Program Manager, U.S.
H2020 (ART ) CARTRE SCOUT
 CARTRE SCOUT") H2020 (ART-06-2016) CARTRE SCOUT Objective Advance deployment of connected and automated driving across Europe October 2016 September 2018 Coordination & Support Action 2 EU-funded Projects 36 consortium
H2020 (ART-06-2016) CARTRE SCOUT Objective Advance deployment of connected and automated driving across Europe October 2016 September 2018 Coordination & Support Action 2 EU-funded Projects 36 consortium
DOT HS October 2011
 TRAFFIC SAFETY FACTS 2009 Data DOT HS 811 389 October 2011 Motorcycles Definitions often vary across publications with respect to individuals on motorcycles. For this document, the following terms will
TRAFFIC SAFETY FACTS 2009 Data DOT HS 811 389 October 2011 Motorcycles Definitions often vary across publications with respect to individuals on motorcycles. For this document, the following terms will
Traffic Safety Facts. Alcohol Data. Alcohol-Related Crashes and Fatalities
 Traffic Safety Facts 2005 Data Alcohol There were 16,885 alcohol-related fatalities in 2005 39 percent of the total traffic fatalities for the year. Alcohol-Related Crashes and Fatalities DOT HS 810 616
Traffic Safety Facts 2005 Data Alcohol There were 16,885 alcohol-related fatalities in 2005 39 percent of the total traffic fatalities for the year. Alcohol-Related Crashes and Fatalities DOT HS 810 616
Development of California Regulations for Testing and Operation of Automated Driving Systems
 Development of California Regulations for Testing and Operation of Automated Driving Systems Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California,
Development of California Regulations for Testing and Operation of Automated Driving Systems Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California,
Connected Vehicles for Safety
 Connected Vehicles for Safety Shelley Row Director Intelligent Transportation Systems Joint Program Office Research and Innovative Technology Administration, USDOT The Problem Safety 32,788 highway deaths
Connected Vehicles for Safety Shelley Row Director Intelligent Transportation Systems Joint Program Office Research and Innovative Technology Administration, USDOT The Problem Safety 32,788 highway deaths
Trafiksimulering av självkörande fordon hur kan osäkerheter gällande körbeteende och heterogenitet hanteras
 Trafiksimulering av självkörande fordon hur kan osäkerheter gällande körbeteende och heterogenitet hanteras CTR-dagen 2018, Stockholm Johan Olstam Agenda What is an automated vehicle? Challenges for traffic
Trafiksimulering av självkörande fordon hur kan osäkerheter gällande körbeteende och heterogenitet hanteras CTR-dagen 2018, Stockholm Johan Olstam Agenda What is an automated vehicle? Challenges for traffic
Reducing Greenhouse Gas Emissions through Intelligent Transportation System Solutions. June 1, 2016
 Reducing Greenhouse Gas Emissions through Intelligent Transportation System Solutions June 1, 2016 NCST UNIVERSITY PARTNERS TRANSFORMING THE TRANSPORTATION SYSTEM RESEARCH Producing state of knowledge
Reducing Greenhouse Gas Emissions through Intelligent Transportation System Solutions June 1, 2016 NCST UNIVERSITY PARTNERS TRANSFORMING THE TRANSPORTATION SYSTEM RESEARCH Producing state of knowledge
Automated Vehicles: Terminology and Taxonomy
 Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
Cooperative Autonomous Driving and Interaction with Vulnerable Road Users
 9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
Statement before the New Hampshire House Transportation Committee. Research on primary-enforcement safety belt use laws
 Statement before the New Hampshire House Transportation Committee Research on primary-enforcement safety belt use laws Jessica B. Cicchino, Ph.D. Insurance Institute for Highway Safety The Insurance Institute
Statement before the New Hampshire House Transportation Committee Research on primary-enforcement safety belt use laws Jessica B. Cicchino, Ph.D. Insurance Institute for Highway Safety The Insurance Institute
C-ITS status in Europe and Outlook
 C-ITS status in Europe and Outlook Car 2 Car Communication Consortium ITU Seminar 7 th June 2018 Car 2 Car Communication Consortium Communication Technology Basis ITS-G5 Dedicated Short-Range Communication
C-ITS status in Europe and Outlook Car 2 Car Communication Consortium ITU Seminar 7 th June 2018 Car 2 Car Communication Consortium Communication Technology Basis ITS-G5 Dedicated Short-Range Communication
Support Material Agenda Item No. 3
 Support Material Agenda Item No. 3 Board of Directors Workshop October 19, 2017, 12:30 PM Location Lake Arrowhead Resort and Spa 27984 Highway 189, 1 st Floor, Arrowhead Ballroom Lake Arrowhead, CA Agenda
Support Material Agenda Item No. 3 Board of Directors Workshop October 19, 2017, 12:30 PM Location Lake Arrowhead Resort and Spa 27984 Highway 189, 1 st Floor, Arrowhead Ballroom Lake Arrowhead, CA Agenda
Assessment of ACC and CACC systems using SUMO
 SUMO User Conference 2018 Simulating Autonomous and Intermodal Transport Systems Assessment of ACC and CACC systems using SUMO Center for Research & Technology Hellas, Hellenic Institute of Transport Kallirroi
SUMO User Conference 2018 Simulating Autonomous and Intermodal Transport Systems Assessment of ACC and CACC systems using SUMO Center for Research & Technology Hellas, Hellenic Institute of Transport Kallirroi
Traffic Safety Facts 1996
 U.S. Department of Transportation National Highway Traffic Safety Administration Traffic Safety Facts 1996 Motorcycles In 1996, 2,160 motorcyclists were killed and an additional 56,000 were injured in
U.S. Department of Transportation National Highway Traffic Safety Administration Traffic Safety Facts 1996 Motorcycles In 1996, 2,160 motorcyclists were killed and an additional 56,000 were injured in
Beth Kigel. Florida Transportation Commissioner. Florida s Smart Future: Innovation in Policy and Technology Planning
 Beth Kigel Florida Transportation Commissioner Florida s Smart Future: Innovation in Policy and Technology Planning A perspective of Florida s growth Key Statistics: Additional 6 million residents by 2030
Beth Kigel Florida Transportation Commissioner Florida s Smart Future: Innovation in Policy and Technology Planning A perspective of Florida s growth Key Statistics: Additional 6 million residents by 2030
Traffic Safety Facts 2000
 DOT HS 809 326 U.S. Department of Transportation National Highway Traffic Safety Administration Traffic Safety Facts 2000 Motorcycles In 2000, 2,862 motorcyclists were killed and an additional 58,000 were
DOT HS 809 326 U.S. Department of Transportation National Highway Traffic Safety Administration Traffic Safety Facts 2000 Motorcycles In 2000, 2,862 motorcyclists were killed and an additional 58,000 were
Smart Cities Around the Country
 Smart Cities Around the Country Robert James Date 11/09/2017 Contact rojames@hntb.com (732) 689-1989 2 Automated Intersection https://youtu.be/4smjp8tdwtu Smart Cities A Smart City utilizes innovative
Smart Cities Around the Country Robert James Date 11/09/2017 Contact rojames@hntb.com (732) 689-1989 2 Automated Intersection https://youtu.be/4smjp8tdwtu Smart Cities A Smart City utilizes innovative
Activity-Travel Behavior Impacts of Driverless Cars
 January 12-16, 2014; Washington, D.C. 93 rd Annual Meeting of the Transportation Research Board Activity-Travel Behavior Impacts of Driverless Cars Ram M. Pendyala 1 and Chandra R. Bhat 2 1 School of Sustainable
January 12-16, 2014; Washington, D.C. 93 rd Annual Meeting of the Transportation Research Board Activity-Travel Behavior Impacts of Driverless Cars Ram M. Pendyala 1 and Chandra R. Bhat 2 1 School of Sustainable
A Vision for Highway Automation
 A Vision for Highway Automation R y a n D. R i c e D i r e c t o r o f M o b i l i t y O p e r a t i o n s C o l o r a d o D e p a r t m e n t o f T r a n s p o r t a t i o n Problem Statement Higher
A Vision for Highway Automation R y a n D. R i c e D i r e c t o r o f M o b i l i t y O p e r a t i o n s C o l o r a d o D e p a r t m e n t o f T r a n s p o r t a t i o n Problem Statement Higher
The connected vehicle is the better vehicle!
 AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
Autonomous Vehicles in California. Bernard C. Soriano, Ph.D. Deputy Director, California DMV
 Autonomous Vehicles in California Bernard C. Soriano, Ph.D. Deputy Director, California DMV California at a glance Approximately 38 million people Over 172 thousand public road miles 25 million driver
Autonomous Vehicles in California Bernard C. Soriano, Ph.D. Deputy Director, California DMV California at a glance Approximately 38 million people Over 172 thousand public road miles 25 million driver
Research Challenges for Automated Vehicles
 Research Challenges for Automated Vehicles Steven E. Shladover, Sc.D. University of California, Berkeley October 10, 2005 1 Overview Reasons for automating vehicles How automation can improve efficiency
Research Challenges for Automated Vehicles Steven E. Shladover, Sc.D. University of California, Berkeley October 10, 2005 1 Overview Reasons for automating vehicles How automation can improve efficiency
Case Study STREAMS SMART MOTORWAYS
 Case Study STREAMS SMART MOTORWAYS One of the key challenges facing road agencies today is maximising road network efficiency while reducing impacts on the community. Increasingly, road agencies are turning
Case Study STREAMS SMART MOTORWAYS One of the key challenges facing road agencies today is maximising road network efficiency while reducing impacts on the community. Increasingly, road agencies are turning
8,975 7,927 6,552 6,764
 y = 0.1493x 4-23842x 3 + 1E+09x 2-4E+13x + 4E+17 R 2 = 0.9977 27,717 21,449 17,855 13,222 11,054 10,053 6/28/2009 6/24/2009 6/22/2009 6/20/2009 6/18/2009 6/16/2009 6/14/2009 6/8/2009 6/6/2009 6/4/2009
y = 0.1493x 4-23842x 3 + 1E+09x 2-4E+13x + 4E+17 R 2 = 0.9977 27,717 21,449 17,855 13,222 11,054 10,053 6/28/2009 6/24/2009 6/22/2009 6/20/2009 6/18/2009 6/16/2009 6/14/2009 6/8/2009 6/6/2009 6/4/2009
2009 Migration Patterns traffic flow by state/province
 Interstate and Cross-Border 2009 Migration Patterns traffic flow by state/province Based on 71,474 Interstate Household Goods Moves from January 1, 2009 through December 31, 2009 UNITED STATES ALABAMA
Interstate and Cross-Border 2009 Migration Patterns traffic flow by state/province Based on 71,474 Interstate Household Goods Moves from January 1, 2009 through December 31, 2009 UNITED STATES ALABAMA
2010 Migration Patterns traffic flow by state/province
 Interstate and Cross-Border 2010 Migration Patterns traffic flow by state/province Based on 74,541 Interstate Household Goods Moves from January 1, 2010 through December 31, 2010 UNITED STATES ALABAMA
Interstate and Cross-Border 2010 Migration Patterns traffic flow by state/province Based on 74,541 Interstate Household Goods Moves from January 1, 2010 through December 31, 2010 UNITED STATES ALABAMA
Implications of Automated Driving. Bart van Arem
 Implications of Automated Driving Bart van Arem Who is Bart van Arem? 1982-1990: MSc (1986) and PhD (1990) Applied Mathematics University of Twente 1991-2009 TNO Netherlands Organization for Applied Scientific
Implications of Automated Driving Bart van Arem Who is Bart van Arem? 1982-1990: MSc (1986) and PhD (1990) Applied Mathematics University of Twente 1991-2009 TNO Netherlands Organization for Applied Scientific
DOT HS July 2012
 TRAFFIC SAFETY FACTS 2010 Data DOT HS 811 639 July 2012 Motorcycles In 2010, 4,502 motorcyclists were killed a slight increase from the 4,469 motorcyclists killed in 2009. There were 82,000 motorcyclists
TRAFFIC SAFETY FACTS 2010 Data DOT HS 811 639 July 2012 Motorcycles In 2010, 4,502 motorcyclists were killed a slight increase from the 4,469 motorcyclists killed in 2009. There were 82,000 motorcyclists
Near-Term Automation Issues: Use Cases and Standards Needs
 Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
Connected and Automated Vehicles: How Do We Prepare? Peter Sweatman Principal, CAVita LLC
 Connected and Automated Vehicles: How Do We Prepare? Peter Sweatman Principal, CAVita LLC Committee for a Study of the Future Interstate Highway System CAVita 1 Giving life to transformational technology
Connected and Automated Vehicles: How Do We Prepare? Peter Sweatman Principal, CAVita LLC Committee for a Study of the Future Interstate Highway System CAVita 1 Giving life to transformational technology
Introduction. Julie C. DeFalco Policy Analyst 125.
 Introduction The federal Corporate Average Fuel Economy (CAFE) standards were originally imposed in the mid-1970s as a way to save oil. They turned out to be an incredibly expensive and ineffective way
Introduction The federal Corporate Average Fuel Economy (CAFE) standards were originally imposed in the mid-1970s as a way to save oil. They turned out to be an incredibly expensive and ineffective way
Ensuring the safety of automated vehicles
 Ensuring the safety of automated vehicles Alan Stevens Workshop on Verification and Validation for Autonomous Road Vehicles 4 Nov 2016 1 Agenda / Table of contents 1 2 3 Planning trials and safety Estimating
Ensuring the safety of automated vehicles Alan Stevens Workshop on Verification and Validation for Autonomous Road Vehicles 4 Nov 2016 1 Agenda / Table of contents 1 2 3 Planning trials and safety Estimating
TOWARD SAFE AND RELIABLE ROADWAYS. Jill Ryan, MPH Eagle County Commissioner
 TOWARD SAFE AND RELIABLE ROADWAYS Jill Ryan, MPH Eagle County Commissioner Where Does CDOT Money Go? FY2012 (in CDOT millions) Expenditures $1,104,588,163* $684.3 [63%] MAINTAIN What We Have 15% 14% 5%
TOWARD SAFE AND RELIABLE ROADWAYS Jill Ryan, MPH Eagle County Commissioner Where Does CDOT Money Go? FY2012 (in CDOT millions) Expenditures $1,104,588,163* $684.3 [63%] MAINTAIN What We Have 15% 14% 5%
Efficiency Matters for Mobility. Presented at A3PS ECO MOBILITY 2018 Vienna, Austria November 12 th and 13 th, 2018
 Efficiency Matters for Mobility High-Performance, Ann M. Schlenker Agent-Based Director, Simulation Center for of Transportation Travelers Research and Transportation Argonne National Laboratory Systems
Efficiency Matters for Mobility High-Performance, Ann M. Schlenker Agent-Based Director, Simulation Center for of Transportation Travelers Research and Transportation Argonne National Laboratory Systems
Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow
 See discussions, stats, and author profiles for this publication at: http://www.researchgate.net/publication/266391703 Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow Impacts of
See discussions, stats, and author profiles for this publication at: http://www.researchgate.net/publication/266391703 Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow Impacts of
An Introduction to Automated Vehicles
 An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
Automated Vehicles: Perspectives from Canadian vehicle OEMs. CCMTA Annual Meeting Toronto, ON May 25, 2014
 Automated Vehicles: Perspectives from Canadian vehicle OEMs CCMTA Annual Meeting Toronto, ON May 25, 2014 Overview 1. Our membership 2. Automated vs. autonomous vehicles Levels of automation 3. Technology
Automated Vehicles: Perspectives from Canadian vehicle OEMs CCMTA Annual Meeting Toronto, ON May 25, 2014 Overview 1. Our membership 2. Automated vs. autonomous vehicles Levels of automation 3. Technology
Traffic Management for the 21 st Century
 Traffic Management for the 21 st Century Dr. Markos Papageorgiou Professor Technical University of Crete Chania, Greece #TrafficSolutions Traffic Management for the 21 st Century Prof. Markos Papageorgiou
Traffic Management for the 21 st Century Dr. Markos Papageorgiou Professor Technical University of Crete Chania, Greece #TrafficSolutions Traffic Management for the 21 st Century Prof. Markos Papageorgiou
Measuring Autonomous Vehicle Impacts on Congested Networks Using Simulation
 0 Measuring Autonomous Vehicle Impacts on Congested Networks Using Simulation Corresponding Author: David Stanek, PE Fehr & Peers 0 K Street, rd Floor, Sacramento, CA Tel: () -; Fax: () -0; Email: D.Stanek@fehrandpeers.com
0 Measuring Autonomous Vehicle Impacts on Congested Networks Using Simulation Corresponding Author: David Stanek, PE Fehr & Peers 0 K Street, rd Floor, Sacramento, CA Tel: () -; Fax: () -0; Email: D.Stanek@fehrandpeers.com
Roy Hulli, P.Eng. and. Fernando Chua. Intelligent Transportation Systems Ministry of Transportation Ontario
 Roy Hulli, P.Eng and Fernando Chua Intelligent Transportation Systems Ministry of Transportation Ontario Smart Cities Data Connectivity Disruption Context of Change Automated Vehicles Monitoring by sensors
Roy Hulli, P.Eng and Fernando Chua Intelligent Transportation Systems Ministry of Transportation Ontario Smart Cities Data Connectivity Disruption Context of Change Automated Vehicles Monitoring by sensors
MAVEN (Managing Automated Vehicles Enhances Network) MAVEN use cases. Ondřej Přibyl Czech Technical University in Prague
 MAVEN use cases. Ondřej Přibyl Czech Technical University in Prague") MAVEN (Managing Automated Vehicles Enhances Network) MAVEN use cases Ondřej Přibyl Czech Technical University in Prague Stakeholder Workshop Barcelona 1 Agenda 1. Definition of MAVEN scope 2. Presentation
MAVEN (Managing Automated Vehicles Enhances Network) MAVEN use cases Ondřej Přibyl Czech Technical University in Prague Stakeholder Workshop Barcelona 1 Agenda 1. Definition of MAVEN scope 2. Presentation
DEAL ER DATAVI EW. Digital Marketing Index August 2018
 DEAL ER DATAVI EW Digital Marketing Index August 2018 DATA DRIVES STRATEGY. The DataView is a monthly automotive digital marketing index, based on Dealer.com s proprietary data, research and analytics.
DEAL ER DATAVI EW Digital Marketing Index August 2018 DATA DRIVES STRATEGY. The DataView is a monthly automotive digital marketing index, based on Dealer.com s proprietary data, research and analytics.
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
Robots on Our Roads: The Coming Revolution in Mobility. Ohio Planning Conference July 27, 2016 Richard Bishop
 Robots on Our Roads: The Coming Revolution in Mobility Ohio Planning Conference July 27, 2016 Richard Bishop Myths! The roads need to be changed to make automated driving possible. WRONG! All vehicles
Robots on Our Roads: The Coming Revolution in Mobility Ohio Planning Conference July 27, 2016 Richard Bishop Myths! The roads need to be changed to make automated driving possible. WRONG! All vehicles
Automated driving in urban environments: technical challenges, open problems and barriers. Fawzi Nashashibi
 Automated driving in urban environments: technical challenges, open problems and barriers Fawzi Nashashibi 6th Workshop on Planning, Perception and Navigation for Intelligent Vehicles SEPTEMBER 14, 2014
Automated driving in urban environments: technical challenges, open problems and barriers Fawzi Nashashibi 6th Workshop on Planning, Perception and Navigation for Intelligent Vehicles SEPTEMBER 14, 2014
Failing the Grade: School Bus Pollution & Children s Health. Patricia Monahan Union of Concerned Scientists Clean Cities Conference May 13, 2002
 Failing the Grade: School Bus Pollution & Children s Health Patricia Monahan Union of Concerned Scientists Clean Cities Conference May 13, 2002 Outline School bus/diesel pollution and children s health
Failing the Grade: School Bus Pollution & Children s Health Patricia Monahan Union of Concerned Scientists Clean Cities Conference May 13, 2002 Outline School bus/diesel pollution and children s health
DOE s Focus on Energy Efficient Mobility Systems
 DOE s Focus on Energy Efficient Mobility Systems David L. Anderson Energy Efficient Mobility Systems Program Vehicle Technologies Office Automated Vehicle Symposium San Francisco, California July 13, 2017
DOE s Focus on Energy Efficient Mobility Systems David L. Anderson Energy Efficient Mobility Systems Program Vehicle Technologies Office Automated Vehicle Symposium San Francisco, California July 13, 2017
Intelligent Vehicle Systems Southwest Research Institute
 Intelligent Vehicle Systems Southwest Research Institute State-of-the-Art: Self Driving Cars (aka Automated Vehicles) Josh Johnson Assistant Director R&D Intelligent Systems 1 Motivation for This Presentation
Intelligent Vehicle Systems Southwest Research Institute State-of-the-Art: Self Driving Cars (aka Automated Vehicles) Josh Johnson Assistant Director R&D Intelligent Systems 1 Motivation for This Presentation
CONNECTED AUTOMATION HOW ABOUT SAFETY?
 CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
ALASKA FORUM ON AUTONOMOUS VEHICLES
 ALASKA FORUM ON AUTONOMOUS VEHICLES ITE is an international membership association of transportation professionals who work to improve mobility and safety for all transportation system users and help build
ALASKA FORUM ON AUTONOMOUS VEHICLES ITE is an international membership association of transportation professionals who work to improve mobility and safety for all transportation system users and help build
ANNUAL FINANCIAL PROFILE OF AMERICA S FRANCHISED NEW-TRUCK DEALERSHIPS
 217 ANNUAL FINANCIAL PROFILE OF AMERICA S FRANCHISED NEW-TRUCK DEALERSHIPS Overview For 217, ATD Data our annual financial profile of franchised new medium- and heavyduty truck dealerships shows the following:
217 ANNUAL FINANCIAL PROFILE OF AMERICA S FRANCHISED NEW-TRUCK DEALERSHIPS Overview For 217, ATD Data our annual financial profile of franchised new medium- and heavyduty truck dealerships shows the following:
Connected and Automated Vehicle Program Plan. Dean H. Gustafson, PE, PTOE VDOT Statewide Operations Engineer February 10, 2016
 Connected and Automated Vehicle Program Plan Dean H. Gustafson, PE, PTOE VDOT Statewide Operations Engineer February 10, 2016 Connected Vehicle Program continues to evolve at the National Level AASHTO
Connected and Automated Vehicle Program Plan Dean H. Gustafson, PE, PTOE VDOT Statewide Operations Engineer February 10, 2016 Connected Vehicle Program continues to evolve at the National Level AASHTO
ESTIMATED NUMBER OF NEW CANCER CASES AND DEATHS BY STATE All Sites Brain and ONS Female Breast Uterine Cervix STATE Cases Deaths Cases Deaths
 All Sites Brain and ONS Female Breast Uterine Cervix Alabama 24,090 9,900 310 200 2,970 700 190 80 Alaska 2,530 830 * * 370 60 * * Arizona 27,600 10,260 470 280 3,470 740 210 80 Arkansas 14,800 6,230 200
All Sites Brain and ONS Female Breast Uterine Cervix Alabama 24,090 9,900 310 200 2,970 700 190 80 Alaska 2,530 830 * * 370 60 * * Arizona 27,600 10,260 470 280 3,470 740 210 80 Arkansas 14,800 6,230 200
Leading the way to seamless mobility November th, 2017 Tampa, Florida
 Leading the way to seamless mobility November 14-15 th, 2017 Tampa, Florida usa.siemens.com/intelligenttraffic Urban mobility challenges A view on safety and congestion Trend Challenges + 2 Cities grow
Leading the way to seamless mobility November 14-15 th, 2017 Tampa, Florida usa.siemens.com/intelligenttraffic Urban mobility challenges A view on safety and congestion Trend Challenges + 2 Cities grow
Test & Validation Challenges Facing ADAS and CAV
 Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
STATE. State Sales Tax Rate (Does not include local taxes) Credit allowed by Florida for tax paid in another state
 Credit allowed by Florida for tax paid in another state") tax paid in another state or isolated sales ALABAMA 2% ALASKA ARIZONA 5.6% ARKANSAS 6.5% CALIFORNIA 7.25% COLORADO 2.9% CONNECTICUT DELAWARE DISTRICT OF COLUMBIA GEORGIA 6.35% on motor vehicles with a
tax paid in another state or isolated sales ALABAMA 2% ALASKA ARIZONA 5.6% ARKANSAS 6.5% CALIFORNIA 7.25% COLORADO 2.9% CONNECTICUT DELAWARE DISTRICT OF COLUMBIA GEORGIA 6.35% on motor vehicles with a
TRAFFIC SAFETY FACTS Fatal Motor Vehicle Crashes: Overview. Research Note. DOT HS October 2017
 TRAFFIC SAFETY FACTS Research Note DOT HS 812 456 October 2017 2016 Fatal Motor Vehicle Crashes: Overview There were 37,461 people killed in crashes on U.S. roadways during 2016, an increase from 35,485
TRAFFIC SAFETY FACTS Research Note DOT HS 812 456 October 2017 2016 Fatal Motor Vehicle Crashes: Overview There were 37,461 people killed in crashes on U.S. roadways during 2016, an increase from 35,485
Automated and Connected Vehicles: Planning for Uncertainty
 Automated and Connected Vehicles: Planning for Uncertainty Tim Burkhardt APA Minnesota 9/28/2017 PLANNING IMPLICATIONS We plan for 20 years (or more) We design for 50 years (or more) o Elon Musk is not
Automated and Connected Vehicles: Planning for Uncertainty Tim Burkhardt APA Minnesota 9/28/2017 PLANNING IMPLICATIONS We plan for 20 years (or more) We design for 50 years (or more) o Elon Musk is not
U.S. Highway Attributes Relevant to Lane Tracking Raina Shah Christopher Nowakowski Paul Green
 Technical Report UMTRI-98-34 August, 1998 U.S. Highway Attributes Relevant to Lane Tracking Raina Shah Christopher Nowakowski Paul Green 1. Report No. UMTRI-98-34 Technical Report Documentation Page 2.
Technical Report UMTRI-98-34 August, 1998 U.S. Highway Attributes Relevant to Lane Tracking Raina Shah Christopher Nowakowski Paul Green 1. Report No. UMTRI-98-34 Technical Report Documentation Page 2.
ESTIMATED NUMBER OF NEW CANCER CASES AND DEATHS BY STATE All Sites Brain & ONS Female Breast Uterine Cervix STATE Cases Deaths Cases Deaths
 ESTIMATED NUMBER OF NEW CANCER CASES AND DEATHS BY STATE -- 2019 All Sites Brain & ONS Female Breast Uterine Cervix Alabama 28,950 10,630 370 350 4,240 690 240 110 Alaska 3,090 1,120 50 * 470 70 * * Arizona
ESTIMATED NUMBER OF NEW CANCER CASES AND DEATHS BY STATE -- 2019 All Sites Brain & ONS Female Breast Uterine Cervix Alabama 28,950 10,630 370 350 4,240 690 240 110 Alaska 3,090 1,120 50 * 470 70 * * Arizona
Emerging Technologies & Autonomous Vehicle Readiness Planning. Georgia Planning Association Conference Jekyll Island, GA September 5, 2018
 Emerging Technologies & Autonomous Vehicle Readiness Planning Georgia Planning Association Conference Jekyll Island, GA September 5, 2018 Agenda 1 U.S. Context 2 U.S. Survey on Emerging Technologies &
Emerging Technologies & Autonomous Vehicle Readiness Planning Georgia Planning Association Conference Jekyll Island, GA September 5, 2018 Agenda 1 U.S. Context 2 U.S. Survey on Emerging Technologies &
The Role of Vehicle Automation and Intelligent Transportation Systems in Sustainable Transportation
 The Role of Vehicle Automation and Intelligent Transportation Systems in Sustainable Transportation Barth Memorial Symposium May 15, 2015 Matthew Barth Yeager Families Chair Director, Center for Environmental
The Role of Vehicle Automation and Intelligent Transportation Systems in Sustainable Transportation Barth Memorial Symposium May 15, 2015 Matthew Barth Yeager Families Chair Director, Center for Environmental
The Role of Infrastructure Connected to Cars & Autonomous Driving INFRAMIX PROJECT
 The Role of Infrastructure Connected to Cars & Autonomous Driving INFRAMIX PROJECT 20-11-18 1 Index 01 Abertis Autopistas 02 Introduction 03 Road map AV 04 INFRAMIX project 05 Test site autopistas 06 Classification
The Role of Infrastructure Connected to Cars & Autonomous Driving INFRAMIX PROJECT 20-11-18 1 Index 01 Abertis Autopistas 02 Introduction 03 Road map AV 04 INFRAMIX project 05 Test site autopistas 06 Classification
Deployment status and users willingness to pay results on selected invehicle
 Deployment status and users willingness to pay results on selected invehicle ITS systems Background Expectations towards traffic: Reduced burden on environment less CO2 emissions Vision zero of traffic
Deployment status and users willingness to pay results on selected invehicle ITS systems Background Expectations towards traffic: Reduced burden on environment less CO2 emissions Vision zero of traffic
Connected Vehicles. V2X technology.
 EN Kapsch TrafficCom Connected Vehicles. V2X technology. Cooperative Intelligent Transportation Systems (C-ITS) are based on the communication between vehicles and infrastructure (V2I, or vehicle to infrastructure
EN Kapsch TrafficCom Connected Vehicles. V2X technology. Cooperative Intelligent Transportation Systems (C-ITS) are based on the communication between vehicles and infrastructure (V2I, or vehicle to infrastructure
V2V Advancements in the last 12 months. CAMP and related activities
 V2V Advancements in the last 12 months CAMP and related activities Mike Shulman, Ford April 22, 2014 Connected Transportation Environment: Future Vision Mobility Safety Environment Global Gridlock 2 US:
V2V Advancements in the last 12 months CAMP and related activities Mike Shulman, Ford April 22, 2014 Connected Transportation Environment: Future Vision Mobility Safety Environment Global Gridlock 2 US:
RETURN ON INVESTMENT LIQUIFIED NATURAL GAS PIVOTAL LNG TRUCK MARKET LNG TO DIESEL COMPARISON
 RETURN ON INVESTMENT LIQUIFIED NATURAL GAS PIVOTAL LNG TRUCK MARKET LNG TO DIESEL COMPARISON Year 1 Year 2 Year 3 Year 4 Year 5 Year 6 Year 7 Year 8 Year 9 Year 10 RETAIL BREAK EVEN AND IRR EXAMPLE FOR
RETURN ON INVESTMENT LIQUIFIED NATURAL GAS PIVOTAL LNG TRUCK MARKET LNG TO DIESEL COMPARISON Year 1 Year 2 Year 3 Year 4 Year 5 Year 6 Year 7 Year 8 Year 9 Year 10 RETAIL BREAK EVEN AND IRR EXAMPLE FOR
Monthly Biodiesel Production Report
 Monthly Biodiesel Production Report With data for June 2017 August 2017 Independent Statistics & Analysis www.eia.gov U.S. Department of Energy Washington, DC 20585 This report was prepared by the U.S.
Monthly Biodiesel Production Report With data for June 2017 August 2017 Independent Statistics & Analysis www.eia.gov U.S. Department of Energy Washington, DC 20585 This report was prepared by the U.S.
CONNECTED AND AUTOMATED TRANSPORTATION AND THE TEXAS AV PROVING GROUNDS PARTNERSHIP
 CONNECTED AND AUTOMATED TRANSPORTATION AND THE TEXAS AV PROVING GROUNDS PARTNERSHIP Christopher Poe, Ph.D., P.E. Assistant Director, Connected and Automated Transportation Strategy Texas A&M Transportation
CONNECTED AND AUTOMATED TRANSPORTATION AND THE TEXAS AV PROVING GROUNDS PARTNERSHIP Christopher Poe, Ph.D., P.E. Assistant Director, Connected and Automated Transportation Strategy Texas A&M Transportation
SIMULATING AUTONOMOUS VEHICLES ON OUR TRANSPORT NETWORKS
 SIMULATING AUTONOMOUS VEHICLES ON OUR TRANSPORT NETWORKS www.ptvgroup.com Alastair Evanson, Solution Director PTV Vissim TOMORROW S CONNECTED & BUSINESS AUTONOMOUS MODEL: VEHICLES SIGNIFICANT SHIFT TO
SIMULATING AUTONOMOUS VEHICLES ON OUR TRANSPORT NETWORKS www.ptvgroup.com Alastair Evanson, Solution Director PTV Vissim TOMORROW S CONNECTED & BUSINESS AUTONOMOUS MODEL: VEHICLES SIGNIFICANT SHIFT TO