Supervisor: Artzi Dror. Preliminary Design Review
|
|
|
- Nathaniel Chambers
- 5 years ago
- Views:
Transcription



1 Remote Special Purpose- Eye Supervisor: Artzi Dror Preliminary Design Review
2 This project deals with UAV, that is carried and launched by the existing manned plane. The UAV s purpose is to enlarge the mother plane s range of surveillance. During this semester different surveys about the existing UAVs, the airplanes with external additions, EO/IR payloads, data transfer systems were done. 2

3 Mission definitions and purpose Mission requirements Operational concept Communication general concept Market survey ( similar system, communication) UAV concept and component selection Returning or non-returning UAV UAVs selection E/O turrets selection Modifying the UAV existing model Gondola configuration: Configuration Existing aircrafts, comparison drag Lateral & Longitudinal stability Doors UAV release concept Performance Radius of flight possibilities, endurance of mission Wind Tunnel Model Tasks for the next semester 3

4 Special Purpose EYE : video information broadcast from distant location by UAV deployed from a surveillance aircraft. Purpose: to extend the surveillance limit of existing IAF plane King Air B200 by an air deployed UAV News-Ch.1 (news1.avi) 4

5 Range 3283 km Endurance 8 hr Cruise/Top speed 220/292 kt Useful load 1790 kg Dimensions: Length m Wingspan m Height 4.54 m 5




6 6

7 7
8 Communication general concept We ve discussed several options for communication from UAV to ground operator: UAV>>>Airplane>>>Satellite>>>Ground - Beyond Line Of Sight UAV>>>Airplane Line of Sight 8
9 Range from few meters to hundreds of Km. Telemetry and Video 9

10 Satellite Communications solutions Aeronautic VSATS for High Altitude Long Endurance UAVs 10
11 Communication types low bandwidth telemetry link high bandwidth analog/digital In most cases, both the wireless telemetry and real-time video links will be integrated into the UAV with unity gain omni-directional antennas. 11




12 Scheme of UAV communication Transmitting video from UAV to airplane 2.4 GHz Video receiver Data modem Antenna for UAV Video cam. Transmitter 900 MHz GPS Transponder Data modem Transmitting/Receiving data from UAV to airplane Auto-pilot 12
13 Video/Data transfer components selection Several options were checked. Most of transmitters/receivers have very similar characteristics. That's why, It was decided to use Israel-made systems. 13
, audio, data Output power:")

14 UAV transmitter COMMTAC: CTX-Series: Analog video (PAL, NTSC), audio, data Output power: 200mW-15W Bandwidth: 16Mhz,??kbs Frequency band: L,S,C,X,Ku Range: ~150Km Weight: 420gr 14
, audio,")

15 COMMTAC: CRX-Series: Analog video (PAL, NTSC), audio, data Bandwidth: 16Mhz,??kbs Frequency band: L,S,C Weight: 370gr 15

16 OMA-P2S102 Omni-directional antenna: Frequency: Mhz, Mhz Height: 250 mm Weight: 0.14 kg One of the advantages of this antenna, that it s can be installed inside the UAV s tale to reduce drag 16







17 Airplane Transmitter/Receiver 17
18 Transmitting power/range calculation 18
19 Returnable Or Non-Returnable UAV Criteria Non-Returnable Returnable Fuel weight percentage for same configuration less More Transmitters dimensions Increasing with range Increasing with range Landing equipment May not be needed Weight/ increased complexity Self - destruction option Weight/ complexity Even more Weight/ complexity 19
20 Returnable or no continued Criteria Non-Returnable Returnable Structure Less weighting one-time job units More costly / complex/ heavy Launch reliability Can allow failure Can t allow failure Range / Endurance All the fuel => mission More than ½ fuel => go home Cost less Need to buy new one every time Bought once can be used more than one time additional maintenance expenses, even more in case of failure 20
21 The Non-Returnable UAV concept was chosen. 21





22 Dominator Raytheon MALD ScanEagle Integrator MON Guard Aerosonde Weight 27kg 100 kg 18kg 59kg 50 kg 15kg Fuel weight, % Concept 150% unknown 30% 40% Unknown, concept 33% Endurance 24h 6h 20h 24h 6.5 h 30h Range Concept 920km 500km 990km 100 km 3000km Speed Concept 111km/h 150 km/hr 60 km/h 80 km/hr Cost Concept $ $ Concept Concept $ picture Payload 2kg 20 kg 11kg 0.6kg Unknown, concept concept 22


23 Category MONGuard ScanEagle Status Concept Existing Information availability mounting on an airliner Release from an airplane The most possible amount possibility possibility Not as much as for the MONGuard Design changes must be made Design changes must be made 23
24 Category MONGuard ScanEagle Max. takeoff weight 50 kg 18 kg Payload Equipped with 2 cameras, possibility to design Carries an inertially stabilized e.o. and i.r. camera Price Concept $ x 1 Payload weight 20 kg 6 kg 24


25 MONGuard: The MONGuard uav was chosen. 25
26 E/O Turrets selection 26
27 Name/ Manufacturer Sensor Field of View (FOV) Power Requir ements Weight [kg] COBALT FLIR IR 1 IR2 EO1 EO2 14.5X cont. WIDE FOV TV 14.7X WIDE FOV 2 gimbel Azimuth 360 Elevation: ~70W 8.2kg D190mm H270mm ESP-600C Controp Daylighy Wide angle Zoom camera IRThermal 15X 3 gimbel 10 μ rad Azimuth 360 Elevation: W 12.3kg D250mm H300mm Mini POP D IAI 4 sensors Daylight Thermal Wave Laser 2-25X Better than 50 μ rad Azimuth 360 Elevation: ~ 150W 7.7kg D204mm H280mm Micro- COMPASS Elop-Elbit FLIR Color TV Laser 4X elec. 12X elec. 50 μ rad Azimuth 360 Elevation: W 6-8kg D210mm 27





28 Cobalt ESP 600 Mini POP MicroComp Flir Controp IAI ELOP 28
29 Name/ Manufact urer Sensor Zoom Field of View (FOV) Power Requir ements Weight [kg] Dimensions Micro POP IAI Day Or Night Wide angle 2-4X electronic Better than 150 μ rad Azimuth ±170 Elevation: W 1.2kg D104mm H180mm TASE DUO Cloud Cap FLIR IR And SONY Vid 2X elec. 26X optical 1 gimbal Azimuth 360 Elevation: W 1.1kg D130mm H195mm SCOPe 100 Day or Night FCB CCD μ Better than 200 μ rad 2gimbel Azimuth: ±173 Elevation W ~1kg D 100mm H182mm Micropilot Mp Day or Night Optical 25X 2X Digital Better than 400 μ rad 2gimbel Azimuth ±170 Elevation: W+ 0.9kg D110 H210 29


30 MicroPOP TASE DUO MicroPilot IAI CloudCap MP-Visione 30
31 The EO payload best suited to SP-EYE purpose is: MicroPop Pros: - excellent onboard stabilization -1 sensor, refitable for day/night use -small dimensions -low price (estimation) -made in Israel Micro POP IAI Day Night Wide angle 2-4X electronic Better than 150 μ rad Azimuth ±170 Elevation : W 1.2kg D104mm H180mm Cons: -heaviest among the light-weight EO turrets -mediocre optics 31

32 32
33 Propeller Wing Thrown Appliances Canard Parachute Batteries Engine Fuel Tank (rear) Air Bag Camera (rear) Air Bag Fuel Tank (front) Camera (front) 33


34 34

35 Weight after removing the components: M gr 35
36 Calculation the center of gravity of removed parts ( without fuel tank ) ˆ X cg ˆ 1110 X c. g. mm C.G. of the payload of our configuration (including fuel addition) must be at the same place. Calculations to find the center of gravity of the fuel tanks X cg.. n n X c. g. of fuel mx n m X c. g. of fuel 1370 n n mm C.G. of all the fuel (including fuel addition) must be at the same place 36
37 Antenna Self-destruct Mechanism Engine + Generator Fuel tank Avionics Transmitter + Receiver Camera 37
38 Part Camera Generator Transmitter Receiver Antenna Avionics + Gps + Auto pilot Fuel Tank Self-Destruct Mechanism 1 Self-Destruct Mechanism 2 Self-Destruct Mechanism 3 Mass [kg] ( add) Distance from nose [mm] 30 2, , , Adding 50% more fuel Adding 50% more endurance 38
39 Installation Process: ~C.G. of plane fwd The new configuration has the same center of gravity The Antenna was placed in the same line as the Self-destruct Mechanisms: 1 placed near the wings, to prevent aerodynamic changes as best as The camera, transmitter, 2 placed on receiver the transmitter and GPS with and receiver avionics The possible. Generator, Fuel Camera tank placed places was placed in next c.g. of to in former the front engine. fuel of tank the were and 3 placed was placed arbitrary for balance to balance and the will detonate moment. vehicle to ensure maximum spatial view towards the fuel tank. 39 Hence we don t need to make a new control system.




 Payload inside the plane Why not?")
40 Payload in gondola under the body Payload Not need on to the open pylon under wings fuselage during the flight It is more safe to Why extract not? : there are no pylons on the But body we will and need wings to deal with is problems necessary : for UAV to 1. withstand It has certain the same height stress limitations. that the Mother plane 2. It does. might (additional affect the reinforcements angle of attack for during UAV will landing. be needed) Payload inside the plane Why not? : Upper fuselage position is compressed, of payload it can t be opened during Why the flight not? :. The payload hides the vertical tail Extraction is dangerous for mother plane 40
 Existing system Needed volume calculation")
41 List of signs: As were said earlier we need to use antennas to control the UAV and to receive data R- dish radius S- hub distance f- focus distance Simplified scheme of antenna D- dish depth To meet the mission requirements it is enough for antenna azimuth range to be 360 and pitch range to be 90 (mother plane will be always above the UAV) Existing system Needed volume calculation 41
42 Result dimensions The requirement of 360 azimuth forms axisymmetrical body Height = 570 mm Diameter = 640 mm Bottom view Side view Pitch angle 0 90 Isometric view 42
43 In order to receive data/video Optimal distance between 2 from two UAV-s simultaneously antennas is not less than length of Distance xR~3150 we might have two antennas. UAV Distance-2 x r ~640 Which minimal distance between antennas is needed for their optimal work? First antenna 30% of sphere 1.2% of sphere Possible position of second one If the antennas are close to each other, one antenna will hide 30% of working surface of another 43
44 UAV & Antenna position in gondola Main dimensions ~1200 Back limitation Front limitation 44



45 UAV & Antenna position in gondola Choosing optimal configuration This configuration is optimal. Foregoing calculations will be based on it. This configuration is not optimal. If This we configuration have 2 UAV-s is in not the optimal. air it is impossible to get There Data/Video will be lots from of free both space UAV-s under simultaneously the UAV, with that one UAV-s antenna position will make huge front area addition. 45

46 Type 1 Type 2 Type 3 SP-EYE 46
 100%, 100% Type 1 0.5 (6.25%) 4 (3.6%) 80%, 80% Type Type 3 12 Type 2 0.315 (3.9%) 4.5 (4%) 50%, 90% Type 3 0.5(6.25%) 3.12(2.")
47 Comparison table Name comparison picture Front area add. m²(%) ~S wet add. m²(%) Comparison of add. to SP-EYE one Front, ~S wet %,% SP- EYE 0.63 (7.8%) 5.6 (5%) 100%, 100% Type (6.25%) 4 (3.6%) 80%, 80% Type Type 3 12 Type (3.9%) 4.5 (4%) 50%, 90% Type 3 0.5(6.25%) 3.12(2.7%) 80%, 62% SP-EYE 47



48 Bombardier Global CTAS Embraer 145 Multi Intel & AEW&C 48
 SP-EYE B- 200 8 112.4 0.63 (7.8%) 5.6 (5%) Global Express 37.")
 14.04 (5.8%) Embraer 145 Multi Intel 8.45 239 1.04 (12.3%) 9.34 (3.")
49 Name picture Front area tot. m² ~S wet Front area add. m²(%) ~S wet add. m²(%) SP-EYE B (7.8%) 5.6 (5%) Global Express (2.1%) 19.8 (5%) Embraer 145 SIVAM AEW&C (2.25%) (5.8%) Embraer 145 Multi Intel (12.3%) 9.34 (3.9%) 49
50 Aerodynamics 1. Gondola" faces 3. the 2. Lateral 1. same Longitudinal Overall stability flight performance: stability: conditions as the rest of the plane. 2. Change in Stability Derivatives of the plane will be linear with gondola all The the Adding gondola - s lateral derivatives of gondola position will will in the be affected. affect lower the part plane of the overall s area and position. the fuselage main performance effect will produce is expected negative on vertical pitch moment tail 3. Gondola - s position righting near moment to aerodynamic ( N ) center reduce arm of forces that appeared because of addition. 4. We expect these effects to be small. 5. Detailed calculation of those effects will be made to CDR. 50





")




51 Name Picture Weight,kg Dimensions L, w, h mmxmmxmm For addition it will contain wiring Doors opening mechanism Gondola - s Pylons with Gondola - s shape reinforcements standard Antennas launch units UAV-s in ( they BRU-46 protective will be chosen later shells ) UAV (folded) x377x497 2 Antenna x640x570 2 Protective Shell x395x560 2 BRU x51x152 2 Gondola shell x820x600 1 Doors opening mechanism and wiring Total ~ 390 ~20 n/a n/a Quantity 51



52 Based on C-beam that has good bending stiffness prevent damages during UAV- s extracting from mother plane but not adding much volume Composite materials made of. needed stiffness small weight. inner geometry will prevent UAV- s damages during the extracting from the protective shell UAV front view Protective shell with UAV side view Protective shell isometric view Protective shell front view 52




53 Parachute 53
54 Films (Movie1.flv) Air launch of UAV Dominator concept MONGuard (Movie2.wmv) MonGuard launch from ground station





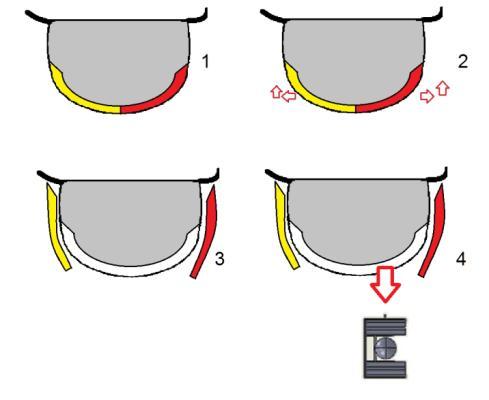
55 Wings Parachute UAV The unfolding, Stabilization UAV is is in UAV Inflating decrease releasing free beginning air ejected the from of Doors Doors by parachute velocity its open the BRU-46 shell mission air open close 55


56 Radius of flight - possibilities: 2 Hours Observation Mission Mother plane radius 1458km MONGuard radius 1658 km 56

57 Radius of flight - possibilities: 3 Hours Observation Mission Mother Plane radius 1352km MONGuard Radius 1532 km 57

58 Radius of flight - possibilities: 4 Hours Observation Mission Mother plane radius 1246 km MONGuard radius 1446 km 58
 not exceed 4% of tunnel s cross section 2) 15cm to each wall from wings 3) Balance must fit to model cross section ( not damage the original")
59 Wind tunnel cross section Balance cross Plane Model section Tunnel 20 mm wall Tunnel wall Plane Model cross section Choosing scale For subsonic wind tunnel model we have 3 limitations: 1) Model FCSA (Frontal Cross-Section Area) not exceed 4% of tunnel s cross section 2) 15cm to each wall from wings 3) Balance must fit to model cross section ( not damage the original aerodynamics ) 59


60 Technion wind tunnel is 1x1 m, cross section area 1 m² Diameter of standard balance is ~20 mm To meet the requirement Model s dimensions: FCSA < 0.04m² wingspan - 70 cm Diameter of body > 40 mm. we will use 1:25 scale 8.8 m² : 25² = 0.014m² < 0.04 m² 16.6 m : 25 = m = 66.4cm < 0.7 m 60
61 Chosen scale 1:25 68 mm > 40 mm 61
62 Completion of 7 th semester tasks Components detailed design and analysis Wind tunnel experiments plane, plane with gondola Weight distribution, balancing the plane UAV control team layout for sitting and operating Design and analysis if the gondola structure, doors opening mechanism Analysis the UAV release fluency Releasing process detailed design of protection cover 62

63 We thank Mr. Arie Tzinnober for devoting his personal time and coming to the Technion, for giving a lecture about the payloads, key-terms, detailed explanations about everything that could be asked and answered: performance, prices, existing possibilities, etc. We thank Mr. Moti Ringel for giving us a detailed consulting about Technion wind tunnel, measuring equipment. 63

64 64
DSSI UAV. Unmanned Aerial Vehicle. Research & Development Project
 UAV Unmanned Aerial Vehicle HISTORY AND SKILLS of Small UAV with electrically powered propeller Description of the solution: Airframe,electronics, 2 battery sets 1 spare Airframe, battery charger Transport
UAV Unmanned Aerial Vehicle HISTORY AND SKILLS of Small UAV with electrically powered propeller Description of the solution: Airframe,electronics, 2 battery sets 1 spare Airframe, battery charger Transport
MINI-REIS A FAMILY OF MULTIFUNCTIONAL UNMANNED LIGHT JET AIRCRAFTS
 National Aerospace University Kharkiv Aviation Institute KhAI Public Joint Stock Company "Kyiv Radio Plant" Inter-Industry Scientific & Research Institute of the Problems of Aircraft Flight Mode Physical
National Aerospace University Kharkiv Aviation Institute KhAI Public Joint Stock Company "Kyiv Radio Plant" Inter-Industry Scientific & Research Institute of the Problems of Aircraft Flight Mode Physical
BY HOEYCOMB AEROSPACE TECHNOLOGIES. HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV
 BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
FLYEYE Unmanned Aerial System
 FLYEYE Unmanned Aerial System FLYEYE Unmanned Aerial System About Flytronic FLYTRONIC is a dynamic modern engineering company focussed on developing Unmanned Aerial Systems to provide observation and reconnaissance
FLYEYE Unmanned Aerial System FLYEYE Unmanned Aerial System About Flytronic FLYTRONIC is a dynamic modern engineering company focussed on developing Unmanned Aerial Systems to provide observation and reconnaissance
In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led
 was founded by current company President Alexander Zakharov, since then he has led") A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
Ejemplos de aeronaves existentes similares a las propuestas en los RFP 2007
 Ejemplos de aeronaves existentes similares a las propuestas en los RFP 2007 UAV Sergio Esteban sesteban@us.es 1 Advanced Technologies and Engineering Co (Pty) Ltd (ATE). Vulture Production: Production
Ejemplos de aeronaves existentes similares a las propuestas en los RFP 2007 UAV Sergio Esteban sesteban@us.es 1 Advanced Technologies and Engineering Co (Pty) Ltd (ATE). Vulture Production: Production
DRONE & UAV.
 www.erapkorea.co.kr DRONE & UAV Extended flight time Proven to be reliable, safe and easy to use Various fields of operation Completely autonomous, and manually controlled ERAP DRONE & UAV WHY ERAP s MAPPING
www.erapkorea.co.kr DRONE & UAV Extended flight time Proven to be reliable, safe and easy to use Various fields of operation Completely autonomous, and manually controlled ERAP DRONE & UAV WHY ERAP s MAPPING
Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon
 , Germany Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori
, Germany Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori
CERBERUS UCAV: Unmanned Combat Aerial Vehicle.
 CERBERUS UCAV: Unmanned Combat Aerial Vehicle. Team members: Marina Kats, Alex Konevsky, Tomer Buium, Oran Katzuni, Matan Argaman, Jacob Frumkin, Amir Levy. Project supervisor: Mr. Dror Artzi Abstract
CERBERUS UCAV: Unmanned Combat Aerial Vehicle. Team members: Marina Kats, Alex Konevsky, Tomer Buium, Oran Katzuni, Matan Argaman, Jacob Frumkin, Amir Levy. Project supervisor: Mr. Dror Artzi Abstract
Deliverable 3 Autonomous Flight Record
 Deliverable 3 Autonomous Flight Record 2012 UAV Outback Challenge Search and Rescue Challenge www.canberrauav.com Proudly Sponsored by: Paul Tridgell Terry Porter Grant Morphett Ron Graham Page 1 of 11
Deliverable 3 Autonomous Flight Record 2012 UAV Outback Challenge Search and Rescue Challenge www.canberrauav.com Proudly Sponsored by: Paul Tridgell Terry Porter Grant Morphett Ron Graham Page 1 of 11
THE FALCON REDUNDANCY HIGH WIND TOLERANCE BEST USED FOR SURVEILLANCE & SECURITY DELIVERY & TRANSPORT
 THE FALCON REDUNDANCY HIGH WIND TOLERANCE The Falcon's new air frame and motor configuration is the new best in its class of light payloads with flight times of up to 50 minutes. This makes the Falcon
THE FALCON REDUNDANCY HIGH WIND TOLERANCE The Falcon's new air frame and motor configuration is the new best in its class of light payloads with flight times of up to 50 minutes. This makes the Falcon
Electric Penguin s philosophy:
 UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v 1.1 Penguin BE Electric Unmanned Platform Up to 110 minutes of endurance 2 with 2.8 kg payload 23 liters of payload volume Quick replaceable battery cartridge
UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v 1.1 Penguin BE Electric Unmanned Platform Up to 110 minutes of endurance 2 with 2.8 kg payload 23 liters of payload volume Quick replaceable battery cartridge
SURVEYOR-H. Technical Data. Max speed 120 km/h. Engine power 7.2 hp. Powerplant Modified Zenoah G29E. Fuel tank volume 3.6 l
 rev. 28.10.14 * features & specifications are subject to change without notice. Technical Data Max speed 120 km/h Engine power 7.2 hp Powerplant Modified Zenoah G29E Fuel tank volume 3.6 l Payload with
rev. 28.10.14 * features & specifications are subject to change without notice. Technical Data Max speed 120 km/h Engine power 7.2 hp Powerplant Modified Zenoah G29E Fuel tank volume 3.6 l Payload with
7. PRELIMINARY DESIGN OF A SINGLE AISLE MEDIUM RANGE AIRCRAFT
 7. PRELIMINARY DESIGN OF A SINGLE AISLE MEDIUM RANGE AIRCRAFT Students: R.M. Bosma, T. Desmet, I.D. Dountchev, S. Halim, M. Janssen, A.G. Nammensma, M.F.A.L.M. Rommens, P.J.W. Saat, G. van der Wolf Project
7. PRELIMINARY DESIGN OF A SINGLE AISLE MEDIUM RANGE AIRCRAFT Students: R.M. Bosma, T. Desmet, I.D. Dountchev, S. Halim, M. Janssen, A.G. Nammensma, M.F.A.L.M. Rommens, P.J.W. Saat, G. van der Wolf Project
Jay Gundlach AIAA EDUCATION SERIES. Manassas, Virginia. Joseph A. Schetz, Editor-in-Chief. Blacksburg, Virginia. Aurora Flight Sciences
 Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Overview. Mission Overview Payload and Subsystems Rocket and Subsystems Management
 MIT ROCKET TEAM Overview Mission Overview Payload and Subsystems Rocket and Subsystems Management Purpose and Mission Statement Our Mission: Use a rocket to rapidly deploy a UAV capable of completing search
MIT ROCKET TEAM Overview Mission Overview Payload and Subsystems Rocket and Subsystems Management Purpose and Mission Statement Our Mission: Use a rocket to rapidly deploy a UAV capable of completing search
PENGUIN C UAS OPERATIONS & MAINTENANCE TRAINING 20 HOURS FLIGHT ENDURANCE 100KM RANGE ITAR - FREE CREW OF TWO
 PENGUIN C UAS LONG ENDURANCE UNMANNED AERIAL SYSTEM 20 HOURS FLIGHT ENDURANCE OPERATIONS & MAINTENANCE TRAINING 100KM RANGE ITAR - FREE CREW OF TWO U AV FAC T O RY LT D., E U R O P E U AV FAC T O RY U
PENGUIN C UAS LONG ENDURANCE UNMANNED AERIAL SYSTEM 20 HOURS FLIGHT ENDURANCE OPERATIONS & MAINTENANCE TRAINING 100KM RANGE ITAR - FREE CREW OF TWO U AV FAC T O RY LT D., E U R O P E U AV FAC T O RY U
Deployment and Flight Test of Inflatable Membrane Aeroshell using Large Scientific Balloon
 1 Deployment and Flight Test of Inflatable Membrane Aeroshell using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori Nagata, Masashi Koyama (The
1 Deployment and Flight Test of Inflatable Membrane Aeroshell using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori Nagata, Masashi Koyama (The
Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business. Real-time Mechanism and System Simulation To Support Flight Simulators
 Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business Real-time Mechanism and System Simulation To Support Flight Simulators Smarter decisions, better products. Contents Introduction
Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business Real-time Mechanism and System Simulation To Support Flight Simulators Smarter decisions, better products. Contents Introduction
CONCEPTUAL DESIGN OF UTM 4-SEATER HELICOPTER. Mohd Shariff Ammoo 1 Mohd Idham Mohd Nayan 1 Mohd Nasir Hussain 2
 CONCEPTUAL DESIGN OF UTM 4-SEATER HELICOPTER Mohd Shariff Ammoo 1 Mohd Idham Mohd Nayan 1 Mohd Nasir Hussain 2 1 Department of Aeronautics Faculty of Mechanical Engineering Universiti Teknologi Malaysia
CONCEPTUAL DESIGN OF UTM 4-SEATER HELICOPTER Mohd Shariff Ammoo 1 Mohd Idham Mohd Nayan 1 Mohd Nasir Hussain 2 1 Department of Aeronautics Faculty of Mechanical Engineering Universiti Teknologi Malaysia
Design and Development of the UTSA Unmanned Aerial System ACE 1
 Design and Development of the UTSA Unmanned Aerial System ACE 1 For use in the 2010 AUVSI Student UAS Competition Ilhan Yilmaz Department of Mechanical Engineering (Team Lead) Christopher Weldon Department
Design and Development of the UTSA Unmanned Aerial System ACE 1 For use in the 2010 AUVSI Student UAS Competition Ilhan Yilmaz Department of Mechanical Engineering (Team Lead) Christopher Weldon Department
PENGUIN B UAV PLATFORM
 UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v.0 PENGUIN B UAV PLATFORM Penguin B platform ready for payload and autopilot integration 0+ hour endurance Fuel injected engine option Up to 10 kg payload capacity
UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v.0 PENGUIN B UAV PLATFORM Penguin B platform ready for payload and autopilot integration 0+ hour endurance Fuel injected engine option Up to 10 kg payload capacity
A SOLAR POWERED UAV. 1 Introduction. 2 Requirements specification
 A SOLAR POWERED UAV Students: R. al Amrani, R.T.J.P.A. Cloosen, R.A.J.M. van den Eijnde, D. Jong, A.W.S. Kaas, B.T.A. Klaver, M. Klein Heerenbrink, L. van Midden, P.P. Vet, C.J. Voesenek Project tutor:
A SOLAR POWERED UAV Students: R. al Amrani, R.T.J.P.A. Cloosen, R.A.J.M. van den Eijnde, D. Jong, A.W.S. Kaas, B.T.A. Klaver, M. Klein Heerenbrink, L. van Midden, P.P. Vet, C.J. Voesenek Project tutor:
Presentation Outline. # Title # Title
 CDR Presentation 1 Presentation Outline # Title # Title 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 Team Introduction Vehicle Overview Vehicle Dimensions Upper Body Section Payload
CDR Presentation 1 Presentation Outline # Title # Title 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 Team Introduction Vehicle Overview Vehicle Dimensions Upper Body Section Payload
Lockheed Martin. Team IDK Seung Soo Lee Ray Hernandez Chunyu PengHarshal Agarkar
 Lockheed Martin Team IDK Seung Soo Lee Ray Hernandez Chunyu PengHarshal Agarkar Abstract Lockheed Martin has developed several different kinds of unmanned aerial vehicles that undergo harsh forces when
Lockheed Martin Team IDK Seung Soo Lee Ray Hernandez Chunyu PengHarshal Agarkar Abstract Lockheed Martin has developed several different kinds of unmanned aerial vehicles that undergo harsh forces when
Predator B: The Multi-Role UAV
 Predator B: The Multi-Role UAV June 2002 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information is estimated to average 1 hour per response,
Predator B: The Multi-Role UAV June 2002 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information is estimated to average 1 hour per response,
UAV KF-1 helicopter. CopterCam UAV KF-1 helicopter specification
 UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
Powertrain Design for Hand- Launchable Long Endurance Unmanned Aerial Vehicles
 Powertrain Design for Hand- Launchable Long Endurance Unmanned Aerial Vehicles Stuart Boland Derek Keen 1 Justin Nelson Brian Taylor Nick Wagner Dr. Thomas Bradley 47 th AIAA/ASME/SAE/ASEE JPC Outline
Powertrain Design for Hand- Launchable Long Endurance Unmanned Aerial Vehicles Stuart Boland Derek Keen 1 Justin Nelson Brian Taylor Nick Wagner Dr. Thomas Bradley 47 th AIAA/ASME/SAE/ASEE JPC Outline
Program Summary Model 281 Proteus
 Program Summary Model 281 Proteus Proteus Name Suggested by Peter Lert A sea-god in Greek mythology who was capable of changing his shape at will [Collins English Dictionary]. In Greek mythology, PROTEUS
Program Summary Model 281 Proteus Proteus Name Suggested by Peter Lert A sea-god in Greek mythology who was capable of changing his shape at will [Collins English Dictionary]. In Greek mythology, PROTEUS
Electric VTOL Aircraft
 Electric VTOL Aircraft Subscale Prototyping Overview Francesco Giannini fgiannini@aurora.aero 1 08 June 8 th, 2017 Contents Intro to Aurora Motivation & approach for the full-scale vehicle Technical challenges
Electric VTOL Aircraft Subscale Prototyping Overview Francesco Giannini fgiannini@aurora.aero 1 08 June 8 th, 2017 Contents Intro to Aurora Motivation & approach for the full-scale vehicle Technical challenges
AT-10 Electric/HF Hybrid VTOL UAS
 AT-10 Electric/HF Hybrid VTOL UAS Acuity Technologies Robert Clark bob@acuitytx.com Summary The AT-10 is a tactical size hybrid propulsion VTOL UAS with a nose camera mount and a large payload bay. Propulsion
AT-10 Electric/HF Hybrid VTOL UAS Acuity Technologies Robert Clark bob@acuitytx.com Summary The AT-10 is a tactical size hybrid propulsion VTOL UAS with a nose camera mount and a large payload bay. Propulsion
Reentry Demonstration Plan of Flare-type Membrane Aeroshell for Atmospheric Entry Vehicle using a Sounding Rocket
 AIAA ADS Conference 2011 in Dublin 1 Reentry Demonstration Plan of Flare-type Membrane Aeroshell for Atmospheric Entry Vehicle using a Sounding Rocket Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki
AIAA ADS Conference 2011 in Dublin 1 Reentry Demonstration Plan of Flare-type Membrane Aeroshell for Atmospheric Entry Vehicle using a Sounding Rocket Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki
AERO. Meet the Aero. Congratulations on your purchase of an Aero!
 AERO Congratulations on your purchase of an Aero! Please read the following sections of this manual to get started with your new autonomous aircraft. 1 Meet the Aero 7 Fly-by-wire mode 2 Safety 8 Command
AERO Congratulations on your purchase of an Aero! Please read the following sections of this manual to get started with your new autonomous aircraft. 1 Meet the Aero 7 Fly-by-wire mode 2 Safety 8 Command
I n s t r u c t i o n M a n u a l. Instruction Manual SPECIFICATION
 I n s t r u c t i o n M a n u a l Instruction Manual SPECIFICATION - Wingspan: 3200mm (125,9 in) - Length: 1650mm (64,9 in) - Flying weight: 3000gr 3200gr - Wing area: 64.5 dm2 - Wing loading: 46g/dm2
I n s t r u c t i o n M a n u a l Instruction Manual SPECIFICATION - Wingspan: 3200mm (125,9 in) - Length: 1650mm (64,9 in) - Flying weight: 3000gr 3200gr - Wing area: 64.5 dm2 - Wing loading: 46g/dm2
Design and Navigation of Flying Robots
 Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
What do we Know? Concepts
 What do we Know? 2012-2013 Concepts Scale: The solar array is about 6 km long. Perspective View Conventional end-fire transmitter 500 m diameter with Earth-tracking reflector; eliminates rotary joint electrical
What do we Know? 2012-2013 Concepts Scale: The solar array is about 6 km long. Perspective View Conventional end-fire transmitter 500 m diameter with Earth-tracking reflector; eliminates rotary joint electrical
Ultralight airplane Design
 Ultralight airplane Design Ultralight airplane definitions: Airworthiness authorities define aircraft as vehicles that can rise or move in the air and enforce strict regulations and requirements for all
Ultralight airplane Design Ultralight airplane definitions: Airworthiness authorities define aircraft as vehicles that can rise or move in the air and enforce strict regulations and requirements for all
German Aerospace Center Flight Operations
 German Aerospace Center Flight Operations Introduction DLR is Germany s aerospace research center and space agency with about 4700 employees in 31 research institutes distributed over 8 main research centers
German Aerospace Center Flight Operations Introduction DLR is Germany s aerospace research center and space agency with about 4700 employees in 31 research institutes distributed over 8 main research centers
SPECIAL MISSION AIRCRAFT
 SPECIAL MISSION AIRCRAFT precision from above FACTS AND SPECIFICATIONS DA42 MPP Guardian - Facts and Specifications Power plant Engine Propeller Fuel grades 2x AUSTRO ENGINE AE300 (168 hp, turbo charged)
SPECIAL MISSION AIRCRAFT precision from above FACTS AND SPECIFICATIONS DA42 MPP Guardian - Facts and Specifications Power plant Engine Propeller Fuel grades 2x AUSTRO ENGINE AE300 (168 hp, turbo charged)
Design of HOMA Micro Air Vehicle at IUT
 Design of HOMA Micro Air Vehicle at IUT Hesam Salehipour *, Nasim Amiri Mechanical Engineering Students, Isfahan, IRAN and Mahmud Ashrafizaadeh Assistant Professor, Department of Mechanical Engineering,
Design of HOMA Micro Air Vehicle at IUT Hesam Salehipour *, Nasim Amiri Mechanical Engineering Students, Isfahan, IRAN and Mahmud Ashrafizaadeh Assistant Professor, Department of Mechanical Engineering,
Aeronautical Systems Center
 Aeronautical Systems Center Global Hawk Program Overview Michael Johnston 303 AESG/LG DSN: 787-4047 Comm: 937-255-4047 michael.johnston@wpafb.af.mil RQ-4A Global Hawk System Global Hawk: High-altitude,
Aeronautical Systems Center Global Hawk Program Overview Michael Johnston 303 AESG/LG DSN: 787-4047 Comm: 937-255-4047 michael.johnston@wpafb.af.mil RQ-4A Global Hawk System Global Hawk: High-altitude,
UAVs UK - factsheet. The Variants. Desert Hawk
 FS 70 UAVs UK - factsheet The Variants Desert Hawk Battery powered and hand launched. Can fly for around one hour at 200-800 feet within a 15km radius of its ground control system. Used for battlefield
FS 70 UAVs UK - factsheet The Variants Desert Hawk Battery powered and hand launched. Can fly for around one hour at 200-800 feet within a 15km radius of its ground control system. Used for battlefield
THE ULTIMATE DRONE SOLUTION
 THE ULTIMATE DRONE SOLUTION LX-1 ECHELON LiDAR MULTIROTOR Brochure & Technical Specifications OVERVIEW The LX-1 Echelon is a professional-grade hexacopter equipped with a LiDAR sensing payload, and designed
THE ULTIMATE DRONE SOLUTION LX-1 ECHELON LiDAR MULTIROTOR Brochure & Technical Specifications OVERVIEW The LX-1 Echelon is a professional-grade hexacopter equipped with a LiDAR sensing payload, and designed
The winner team will have the opportunity to perform a wind tunnel test campaign in the transonic/supersonic Wind tunnel at the VKI.
 Aircraft Design Competition Request for proposal (RFP) - High speed UAV Objectives: This RFP asks for an original UAV design capable of reaching, in less than 15 minutes, a given target located at 150
Aircraft Design Competition Request for proposal (RFP) - High speed UAV Objectives: This RFP asks for an original UAV design capable of reaching, in less than 15 minutes, a given target located at 150
UNCLASSIFIED R-1 ITEM NOMENCLATURE. FY 2014 FY 2014 OCO ## Total FY 2015 FY 2016 FY 2017 FY 2018
 COST ($ in Millions) Years FY 2012 FY 2013 # ## FY 2015 FY 2016 FY 2017 FY 2018 To Program Element 335.638 51.642 9.122 3.326-3.326 1.396 0.930 0.279 0.284 0.000 402.617 675143: Predator 335.638 51.642
COST ($ in Millions) Years FY 2012 FY 2013 # ## FY 2015 FY 2016 FY 2017 FY 2018 To Program Element 335.638 51.642 9.122 3.326-3.326 1.396 0.930 0.279 0.284 0.000 402.617 675143: Predator 335.638 51.642
AIRCRAFT DESIGN SUBSONIC JET TRANSPORT
 AIRCRAFT DESIGN SUBSONIC JET TRANSPORT Analyzed by: Jin Mok Professor: Dr. R.H. Liebeck Date: June 6, 2014 1 Abstract The purpose of this report is to design the results of a given specification and to
AIRCRAFT DESIGN SUBSONIC JET TRANSPORT Analyzed by: Jin Mok Professor: Dr. R.H. Liebeck Date: June 6, 2014 1 Abstract The purpose of this report is to design the results of a given specification and to
MAVIC AIR. Quick Start Guide V1.2
 MAVIC AIR Quick Start Guide V1.2 Aircraft The DJI TM MAVIC TM Air features a new folding design and a fully stabilized 3-axis gimbal camera capable of shooting 4K video and 12 megapixel photos. DJI signature
MAVIC AIR Quick Start Guide V1.2 Aircraft The DJI TM MAVIC TM Air features a new folding design and a fully stabilized 3-axis gimbal camera capable of shooting 4K video and 12 megapixel photos. DJI signature
WHEN BORDER SECURITY MATTERS
 WHEN BORDER SECURITY MATTERS WHEN BORDER SECURITY MATTERS Archangel performs long-range Intelligence, Surveillance and Reconnaissance (ISR) and standoff precision strike missions while maintaining a Common
WHEN BORDER SECURITY MATTERS WHEN BORDER SECURITY MATTERS Archangel performs long-range Intelligence, Surveillance and Reconnaissance (ISR) and standoff precision strike missions while maintaining a Common
Length Height Rotor Diameter Tail Rotor Diameter..12. Tail Boom Length Width
 2.1 Air Vehicle 2.1.1 Vehicle General Description The PA-01 Vapor S-UAV is a rotary wing small unmanned aerial vehicle. The AV is powered by an outrunner 8.5hp class brushless electric motor. The airframe
2.1 Air Vehicle 2.1.1 Vehicle General Description The PA-01 Vapor S-UAV is a rotary wing small unmanned aerial vehicle. The AV is powered by an outrunner 8.5hp class brushless electric motor. The airframe
Chapter 3: Aircraft Construction
 Chapter 3: Aircraft Construction p. 1-3 1. Aircraft Design, Certification, and Airworthiness 1.1. Replace the letters A, B, C, and D by the appropriate name of aircraft component A: B: C: D: E: 1.2. What
Chapter 3: Aircraft Construction p. 1-3 1. Aircraft Design, Certification, and Airworthiness 1.1. Replace the letters A, B, C, and D by the appropriate name of aircraft component A: B: C: D: E: 1.2. What
Appenidix E: Freewing MAE UAV analysis
 Appenidix E: Freewing MAE UAV analysis The vehicle summary is presented in the form of plots and descriptive text. Two alternative mission altitudes were analyzed and both meet the desired mission duration.
Appenidix E: Freewing MAE UAV analysis The vehicle summary is presented in the form of plots and descriptive text. Two alternative mission altitudes were analyzed and both meet the desired mission duration.
AN ADVANCED COUNTER-ROTATING DISK WING AIRCRAFT CONCEPT Program Update. Presented to NIAC By Carl Grant November 9th, 1999
 AN ADVANCED COUNTER-ROTATING DISK WING AIRCRAFT CONCEPT Program Update Presented to NIAC By Carl Grant November 9th, 1999 DIVERSITECH, INC. Phone: (513) 772-4447 Fax: (513) 772-4476 email: carl.grant@diversitechinc.com
AN ADVANCED COUNTER-ROTATING DISK WING AIRCRAFT CONCEPT Program Update Presented to NIAC By Carl Grant November 9th, 1999 DIVERSITECH, INC. Phone: (513) 772-4447 Fax: (513) 772-4476 email: carl.grant@diversitechinc.com
NASA USLI PRELIMINARY DESIGN REVIEW. University of California, Davis SpaceED Rockets Team
 NASA USLI 2012-13 PRELIMINARY DESIGN REVIEW University of California, Davis SpaceED Rockets Team OUTLINE School Information Launch Vehicle Summary Motor Selection Mission Performance and Predictions Structures
NASA USLI 2012-13 PRELIMINARY DESIGN REVIEW University of California, Davis SpaceED Rockets Team OUTLINE School Information Launch Vehicle Summary Motor Selection Mission Performance and Predictions Structures
Aircraft Design: A Systems Engineering Approach, M. Sadraey, Wiley, 2012 Chapter 11 Aircraft Weight Distribution Tables
 Aircraft Design: A Systems Engineering Approach, M. Sadraey, Wiley, 01 Chapter 11 Aircraft Weight Distribution Tables No Component group Elements Weight X cg Y cg Z cg 1 Wing 1.1. Wing main structure 1..
Aircraft Design: A Systems Engineering Approach, M. Sadraey, Wiley, 01 Chapter 11 Aircraft Weight Distribution Tables No Component group Elements Weight X cg Y cg Z cg 1 Wing 1.1. Wing main structure 1..
Weight & Balance. Let s Wait & Balance. Chapter Sixteen. Page P1. Excessive Weight and Structural Damage. Center of Gravity
 Page P1 Chapter Sixteen Weight & Balance Let s Wait & Balance Excessive Weight and Structural Damage 1. [P2/1/1] Airplanes are designed to be flown up to a specific maximum weight. A. landing B. gross
Page P1 Chapter Sixteen Weight & Balance Let s Wait & Balance Excessive Weight and Structural Damage 1. [P2/1/1] Airplanes are designed to be flown up to a specific maximum weight. A. landing B. gross
Modeling, Structural & CFD Analysis and Optimization of UAV
 Modeling, Structural & CFD Analysis and Optimization of UAV Dr Lazaros Tsioraklidis Department of Unified Engineering InterFEA Engineering, Tantalou 7 Thessaloniki GREECE Next Generation tools for UAV
Modeling, Structural & CFD Analysis and Optimization of UAV Dr Lazaros Tsioraklidis Department of Unified Engineering InterFEA Engineering, Tantalou 7 Thessaloniki GREECE Next Generation tools for UAV
Development, Certification, and Flight Testing of an OPA for UAS FTT Development and Training at NTPS
 Development, Certification, and Flight Testing of an OPA for UAS FTT Development and Training at NTPS 2013 SFTE/SETP Flight Test Symposium Evolution of Flight Testing from Manned Vehicles to UAVs 1 Overview
Development, Certification, and Flight Testing of an OPA for UAS FTT Development and Training at NTPS 2013 SFTE/SETP Flight Test Symposium Evolution of Flight Testing from Manned Vehicles to UAVs 1 Overview
August. October T W T F S S M T W T F S S M T W T F S S M T W T F S S M T W T
 TEXAS A&M UNIVERSITY Aerospace Engineering Department AERO 402 AEROSPACE VEHICLE DESIGN Mr. Wayne Lutz Office: 743A HR Bright Building 979-847-8852 wlutz@tamu.edu Student Copy Mr. Yogesh Babbar Office:
TEXAS A&M UNIVERSITY Aerospace Engineering Department AERO 402 AEROSPACE VEHICLE DESIGN Mr. Wayne Lutz Office: 743A HR Bright Building 979-847-8852 wlutz@tamu.edu Student Copy Mr. Yogesh Babbar Office:
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July ISSN BY B.MADHAN KUMAR
 International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 485 FLYING HOVER BIKE, A SMALL AERIAL VEHICLE FOR COMMERCIAL OR. SURVEYING PURPOSES BY B.MADHAN KUMAR Department
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 485 FLYING HOVER BIKE, A SMALL AERIAL VEHICLE FOR COMMERCIAL OR. SURVEYING PURPOSES BY B.MADHAN KUMAR Department
A-VIATOR (AP68TP 600) Presentation
 Presentation") A-VIATOR (AP68TP 600) Presentation All reasonable care has been taken by VULCANAIR to ensure the accuracy of the information contained in the present document. However, the material presented is provided
A-VIATOR (AP68TP 600) Presentation All reasonable care has been taken by VULCANAIR to ensure the accuracy of the information contained in the present document. However, the material presented is provided
SpaceLoft XL Sub-Orbital Launch Vehicle
 SpaceLoft XL Sub-Orbital Launch Vehicle The SpaceLoft XL is UP Aerospace s workhorse space launch vehicle -- ideal for significant-size payloads and multiple, simultaneous-customer operations. SpaceLoft
SpaceLoft XL Sub-Orbital Launch Vehicle The SpaceLoft XL is UP Aerospace s workhorse space launch vehicle -- ideal for significant-size payloads and multiple, simultaneous-customer operations. SpaceLoft
4.5 HOURS ENDURANCE 21 KG MAX. TAKE-OFF WEIGHT IP-56 WATER/DUST RESISTANT FULLY AUTOMATIC 5 KG PAYLOAD IMC-SHIELDED +50 KM RANGE WITH HD VIDEO
 HEF32 UAV System 4.5 HOURS ENDURANCE 21 KG MAX. TAKE-OFF WEIGHT IP-56 WATER/DUST RESISTANT FULLY AUTOMATIC 5 KG PAYLOAD IMC-SHIELDED +50 KM RANGE WITH HD VIDEO CERTIFIED OPERATIONS MANUAL PART 145 MAINTENANCE
HEF32 UAV System 4.5 HOURS ENDURANCE 21 KG MAX. TAKE-OFF WEIGHT IP-56 WATER/DUST RESISTANT FULLY AUTOMATIC 5 KG PAYLOAD IMC-SHIELDED +50 KM RANGE WITH HD VIDEO CERTIFIED OPERATIONS MANUAL PART 145 MAINTENANCE
Innovating the future of disaster relief
 Innovating the future of disaster relief American Helicopter Society International 33rd Annual Student Design Competition Graduate Student Team Submission VEHICLE OVERVIEW FOUR VIEW DRAWING INTERNAL COMPONENTS
Innovating the future of disaster relief American Helicopter Society International 33rd Annual Student Design Competition Graduate Student Team Submission VEHICLE OVERVIEW FOUR VIEW DRAWING INTERNAL COMPONENTS
EWADE th European Workshop on Aircraft Design Education - Naples 2011
 EWADE 2011 10th European Workshop on Aircraft Design Education - Naples 2011 Regional turboprop conversion for purposes supposing auxiliary engine installation. Technical and economical analysis Prof.
EWADE 2011 10th European Workshop on Aircraft Design Education - Naples 2011 Regional turboprop conversion for purposes supposing auxiliary engine installation. Technical and economical analysis Prof.
1.1 REMOTELY PILOTED AIRCRAFTS
 CHAPTER 1 1.1 REMOTELY PILOTED AIRCRAFTS Remotely Piloted aircrafts or RC Aircrafts are small model radiocontrolled airplanes that fly using electric motor, gas powered IC engines or small model jet engines.
CHAPTER 1 1.1 REMOTELY PILOTED AIRCRAFTS Remotely Piloted aircrafts or RC Aircrafts are small model radiocontrolled airplanes that fly using electric motor, gas powered IC engines or small model jet engines.
How to use the Multirotor Motor Performance Data Charts
 How to use the Multirotor Motor Performance Data Charts Here at Innov8tive Designs, we spend a lot of time testing all of the motors that we sell, and collect a large amount of data with a variety of propellers.
How to use the Multirotor Motor Performance Data Charts Here at Innov8tive Designs, we spend a lot of time testing all of the motors that we sell, and collect a large amount of data with a variety of propellers.
TALON Robot Rechargeable Battery Audio Vehicle Dimensions Endurance Vehicle Communication Ports OCU Rechargeable Battery Endurance Optional Sensors
 TALON Vehicle Dimensions Height (arm stowed): 18 in. (42.7 cm) Height (arm extended): 52 in. (1.3m) Width: 22.5 in. (57.2 cm) Length: 34 in. (86.4 cm) Horizontal reach: 52 in. (1.3m) Below grade reach:
TALON Vehicle Dimensions Height (arm stowed): 18 in. (42.7 cm) Height (arm extended): 52 in. (1.3m) Width: 22.5 in. (57.2 cm) Length: 34 in. (86.4 cm) Horizontal reach: 52 in. (1.3m) Below grade reach:
MAVIC 2 PRO. Quick Start Guide V1.2
 MAVIC 2 PRO Quick Start Guide V1.2 Aircraft The DJI TM MAVIC TM 2 Pro features omnidirectional Vision Systems and Infrared Sensing Systems*, and a fully stabilized 3-axis gimbal with a 1" CMOS sensor camera
MAVIC 2 PRO Quick Start Guide V1.2 Aircraft The DJI TM MAVIC TM 2 Pro features omnidirectional Vision Systems and Infrared Sensing Systems*, and a fully stabilized 3-axis gimbal with a 1" CMOS sensor camera
Design Considerations for Stability: Civil Aircraft
 Design Considerations for Stability: Civil Aircraft From the discussion on aircraft behavior in a small disturbance, it is clear that both aircraft geometry and mass distribution are important in the design
Design Considerations for Stability: Civil Aircraft From the discussion on aircraft behavior in a small disturbance, it is clear that both aircraft geometry and mass distribution are important in the design
Investigative Technologies and Techniques
 Investigative Technologies and Techniques Using Drones In Accident Investigation (Aerial Photography) Drone used in accident investigation Technical specifications and performance Flat 8 motor configuration
Investigative Technologies and Techniques Using Drones In Accident Investigation (Aerial Photography) Drone used in accident investigation Technical specifications and performance Flat 8 motor configuration
suas in CAP Delaware Wing HQ, Civil Air Patrol Development of small Unmanned Aerial Systems
 Delaware Wing HQ, Civil Air Patrol suas in CAP Development of small Unmanned Aerial Systems Advent of the suas Small Unmanned Aerial Systems have become very common recently Sophisticated microprocessors
Delaware Wing HQ, Civil Air Patrol suas in CAP Development of small Unmanned Aerial Systems Advent of the suas Small Unmanned Aerial Systems have become very common recently Sophisticated microprocessors
Aircraft 1. Gimbal and Camera 9. Link Button 2. Downward Vision System
 MAVIC PRO Quick Start Guide V1.2 Aircraft The DJITM MAVICTM Pro is DJI's smallest flying camera, featuring a fully stabilized camera, Intelligent Flight Modes and Obstacle Avoidance inside a revolutionary
MAVIC PRO Quick Start Guide V1.2 Aircraft The DJITM MAVICTM Pro is DJI's smallest flying camera, featuring a fully stabilized camera, Intelligent Flight Modes and Obstacle Avoidance inside a revolutionary
Development of a Variable Stability, Modular UAV Airframe for Local Research Purposes
 Development of a Variable Stability, Modular UAV Airframe for Local Research Purposes John Monk Principal Engineer CSIR, South Africa 28 October 2008 Outline A Brief History of UAV Developments at the
Development of a Variable Stability, Modular UAV Airframe for Local Research Purposes John Monk Principal Engineer CSIR, South Africa 28 October 2008 Outline A Brief History of UAV Developments at the
HEF 32 UNMANNED HELICOPTER SYSTEM
 HEF 32 UNMANNED HELICOPTER SYSTEM > 4 HOURS ENDURANCE 50 KM LINE OF SIGHT RANGE IP-67 WATER/DUST RESISTANT 5 KG PAYLOAD 21.5 KG MAX. TAKE-OFF WEIGHT EMI-SHIELDED ITAR FREE FULLY AUTOMATIC OPERATION ENCRYPTED
HEF 32 UNMANNED HELICOPTER SYSTEM > 4 HOURS ENDURANCE 50 KM LINE OF SIGHT RANGE IP-67 WATER/DUST RESISTANT 5 KG PAYLOAD 21.5 KG MAX. TAKE-OFF WEIGHT EMI-SHIELDED ITAR FREE FULLY AUTOMATIC OPERATION ENCRYPTED
UAVs Conquer The Skies April 07, :00 AM 1211 Electronic Design William Wong
 UAVs Conquer The Skies April 07, 2010 12:00 AM 1211 Electronic Design William Wong Unmanned aerial vehicles (UAVs) come in all shapes and sizes. They range from tiny microbots to high-flying drones like
UAVs Conquer The Skies April 07, 2010 12:00 AM 1211 Electronic Design William Wong Unmanned aerial vehicles (UAVs) come in all shapes and sizes. They range from tiny microbots to high-flying drones like
In response to. 34th Annual AHS International Student Design Competition IIT KANPUR INDIAN INSTITUTE OF TECHNOLOGY, KANPUR
 In response to 34th Annual AHS International Student Design Competition By 2017 VIBHRAM AIRFRAME 4-VIEW ISOMETRIC TOP FRONT SIDE HELICOPTER SYSTEMS OVERVIEW Landing Gear Light weight and high strength
In response to 34th Annual AHS International Student Design Competition By 2017 VIBHRAM AIRFRAME 4-VIEW ISOMETRIC TOP FRONT SIDE HELICOPTER SYSTEMS OVERVIEW Landing Gear Light weight and high strength
4.1 General Information. 4.2 Turning Radii. 4.3 Clearance Radii. 4.4 Visibility From Cockpit in Static Position. 4.5 Runway and Taxiway Turn Paths
 4.0 GROUND MANEUVERING 4.1 General Information 4.2 Turning Radii 4.3 Clearance Radii 4.4 Visibility From Cockpit in Static Position 4.5 Runway and Taxiway Turn Paths 4.6 Runway Holding Bay DECEMBER 2002
4.0 GROUND MANEUVERING 4.1 General Information 4.2 Turning Radii 4.3 Clearance Radii 4.4 Visibility From Cockpit in Static Position 4.5 Runway and Taxiway Turn Paths 4.6 Runway Holding Bay DECEMBER 2002
Jordan High School Rocketry Team. A Roll Stabilized Video Platform and Inflatable Location Device
 Jordan High School Rocketry Team A Roll Stabilized Video Platform and Inflatable Location Device Mission Success Criteria No damage done to any person or property. The recovery system deploys as expected.
Jordan High School Rocketry Team A Roll Stabilized Video Platform and Inflatable Location Device Mission Success Criteria No damage done to any person or property. The recovery system deploys as expected.
Uncontrolled copy not subject to amendment. Airframes. Revision 1.00
 Uncontrolled copy not subject to amendment Airframes Revision 1.00 Chapter 4: Fuselage Learning Objectives The purpose of this chapter is to discuss in more detail the first of the 4 major components
Uncontrolled copy not subject to amendment Airframes Revision 1.00 Chapter 4: Fuselage Learning Objectives The purpose of this chapter is to discuss in more detail the first of the 4 major components
The Airplane That Could!
 The Airplane That Could! Critical Design Review December 6 th, 2008 Haoyun Fu Suzanne Lessack Andrew McArthur Nicholas Rooney Jin Yan Yang Yang Agenda Criteria Preliminary Designs Down Selection Features
The Airplane That Could! Critical Design Review December 6 th, 2008 Haoyun Fu Suzanne Lessack Andrew McArthur Nicholas Rooney Jin Yan Yang Yang Agenda Criteria Preliminary Designs Down Selection Features
CHAPTER 3. A journey of a thousand miles begins with a single step. Confucius
 CHAPTER 3 INTRODUCTION... 3-1 TAIL WHEELS... 3-2 TAILDRAGGER ADVANTAGES... 3-3 TAILDRAGGER DISADVANTAGES... 3-3 CONTROLS... 3-4 TAXI AERODYNAMICS... 3-5 GROUND OPERATIONS... 3-7 INTRODUCTION Hangar flying,
CHAPTER 3 INTRODUCTION... 3-1 TAIL WHEELS... 3-2 TAILDRAGGER ADVANTAGES... 3-3 TAILDRAGGER DISADVANTAGES... 3-3 CONTROLS... 3-4 TAXI AERODYNAMICS... 3-5 GROUND OPERATIONS... 3-7 INTRODUCTION Hangar flying,
System Requirements Review
 AAE 451 Aircraft Senior Design Spring 2007 Continuous Area Coverage via Fixed-Wing Unmanned Aerial Systems System Requirements Review Team 3 Sumitero Darsono Charles Hagenbush Keith Higdon Seung-il Kim
AAE 451 Aircraft Senior Design Spring 2007 Continuous Area Coverage via Fixed-Wing Unmanned Aerial Systems System Requirements Review Team 3 Sumitero Darsono Charles Hagenbush Keith Higdon Seung-il Kim
WingtraOne Technical Specifications
 WingtraOne Technical Specifications wingtra.com The all-in-one drone: large coverage, high resolution and accuracy WingtraOne Resolution Accuracy Coverage down to 0.7 cm/px (0.3 in/px) GSD down to 1 cm
WingtraOne Technical Specifications wingtra.com The all-in-one drone: large coverage, high resolution and accuracy WingtraOne Resolution Accuracy Coverage down to 0.7 cm/px (0.3 in/px) GSD down to 1 cm
FLIGHT READINESS REVIEW TEAM OPTICS
 FLIGHT READINESS REVIEW TEAM OPTICS LAUNCH VEHICLE AND PAYLOAD DESIGN AND DIMENSIONS Vehicle Diameter 4 Upper Airframe Length 40 Lower Airframe Length 46 Coupler Band Length 1.5 Coupler Length 12 Nose
FLIGHT READINESS REVIEW TEAM OPTICS LAUNCH VEHICLE AND PAYLOAD DESIGN AND DIMENSIONS Vehicle Diameter 4 Upper Airframe Length 40 Lower Airframe Length 46 Coupler Band Length 1.5 Coupler Length 12 Nose
Name: Scout Troop: Patrol:
 Name: Scout Troop: Patrol: To gain this badge, you must: 1. Know the rules relating to access to airfields in Policy, Organisation and Rules 2. Carry out research into the development of a specific aircraft
Name: Scout Troop: Patrol: To gain this badge, you must: 1. Know the rules relating to access to airfields in Policy, Organisation and Rules 2. Carry out research into the development of a specific aircraft
NASA - USLI Presentation 1/23/2013. University of Minnesota: USLI CDR 1
 NASA - USLI Presentation 1/23/2013 2013 USLI CDR 1 Final design Key features Final motor choice Flight profile Stability Mass Drift Parachute Kinetic Energy Staged recovery Payload Integration Interface
NASA - USLI Presentation 1/23/2013 2013 USLI CDR 1 Final design Key features Final motor choice Flight profile Stability Mass Drift Parachute Kinetic Energy Staged recovery Payload Integration Interface
Country / Designation Commodity Quantity License Value
 NETHERLANDS TRAINING EQUIPMENT (ALL TYPES) 3 108,960 TRANSPONDERS 4 422,284 TRAVELING WAVE TUBES 21 56,026 VEHICLE MILITARY COMPONENTS & SPARES 107 44,058 Country Total $336,511,918 NETHERLANDS ANTILLES
NETHERLANDS TRAINING EQUIPMENT (ALL TYPES) 3 108,960 TRANSPONDERS 4 422,284 TRAVELING WAVE TUBES 21 56,026 VEHICLE MILITARY COMPONENTS & SPARES 107 44,058 Country Total $336,511,918 NETHERLANDS ANTILLES
39 of 180. Country Total $1,468,301
 ETHIOPIA AIRCRAFT, CARGO C-130, SPARE PARTS 4 7,722 AIRCRAFT, SPARE PARTS MISCELLANEOUS 138,141 COMMUNICATIONS EQUIPMENT & COMPONENTS 100 1,169,300 RADIO SET (COMPONENTS & SPARE PARTS) 1,225 79,538 Country
ETHIOPIA AIRCRAFT, CARGO C-130, SPARE PARTS 4 7,722 AIRCRAFT, SPARE PARTS MISCELLANEOUS 138,141 COMMUNICATIONS EQUIPMENT & COMPONENTS 100 1,169,300 RADIO SET (COMPONENTS & SPARE PARTS) 1,225 79,538 Country
THE KARANTANIA UNMANNED AERIAL SYSTEM
 THE KARANTANIA UNMANNED AERIAL SYSTEM ABSTRACT Tomaž Meze, Bogo Štempihar, Mihael Grom MIBO MODLI d.o.o. Čevica 6, SI 1370 Logatec, Slovenia tomi.meze@siol.net, info@mibojets.com Tone Magister University
THE KARANTANIA UNMANNED AERIAL SYSTEM ABSTRACT Tomaž Meze, Bogo Štempihar, Mihael Grom MIBO MODLI d.o.o. Čevica 6, SI 1370 Logatec, Slovenia tomi.meze@siol.net, info@mibojets.com Tone Magister University
Predator Program Office
 Predator Program Office Developing, Fielding, and Sustaining America s Aerospace Force Predator Program Overview 14 June 02 Lt Col Stephen DeCou ASC/RABP DSN:785-4504 Stephen.DeCou@wpafb.af.mil Report
Predator Program Office Developing, Fielding, and Sustaining America s Aerospace Force Predator Program Overview 14 June 02 Lt Col Stephen DeCou ASC/RABP DSN:785-4504 Stephen.DeCou@wpafb.af.mil Report
Blended Wing Body X-48B Flight Test
 Blended Wing Body X-48B Flight Test R. H. Liebeck BWB Chief Scientist April 2015 X-48B Being Installed in ODU 30x60 Tunnel BOEING is a trademark of Boeing Management Company. BOEING Copyright is a 2009
Blended Wing Body X-48B Flight Test R. H. Liebeck BWB Chief Scientist April 2015 X-48B Being Installed in ODU 30x60 Tunnel BOEING is a trademark of Boeing Management Company. BOEING Copyright is a 2009
Star Tower. Why Aerostats Star Tower: Applications Summary. Description Performance Features Payload. Product CARAVAN INTERNATIONAL CORPORATION
 AEROSTATS CARAVAN INTERNATIONAL CORPORATION Star Tower Why Aerostats Star Tower: Product Description Performance Features Payload Applications Summary Why Our Aerostats Provide persistent wide-area coverage
AEROSTATS CARAVAN INTERNATIONAL CORPORATION Star Tower Why Aerostats Star Tower: Product Description Performance Features Payload Applications Summary Why Our Aerostats Provide persistent wide-area coverage
Flugzeugentwurf / Aircraft Design SS Part 35 points, 70 minutes, closed books. Prof. Dr.-Ing. Dieter Scholz, MSME. Date:
 DEPARTMENT FAHRZEUGTECHNIK UND FLUGZEUGBAU Flugzeugentwurf / Aircraft Design SS 2015 Duration of examination: 180 minutes Last Name: Matrikelnummer: First Name: Prof. Dr.-Ing. Dieter Scholz, MSME Date:
DEPARTMENT FAHRZEUGTECHNIK UND FLUGZEUGBAU Flugzeugentwurf / Aircraft Design SS 2015 Duration of examination: 180 minutes Last Name: Matrikelnummer: First Name: Prof. Dr.-Ing. Dieter Scholz, MSME Date:
Instruction Manual EXTRA 260-EP. 1075mm (42.32 in) 1000mm (39.37 in) 1100gr gr. 4 channel - 4 mini servo. Axi motor 2820
 1000mm (39.37 in) 1100gr gr. 4 channel - 4 mini servo. Axi motor 2820") 1075mm (42.32 in) 1000mm (39.37 in) 1100gr - 1400gr 4 channel - 4 mini servo Axi motor 2820 KIT CONTENTS: We have organized the parts as they come out of the box for better identification during assembly.
1075mm (42.32 in) 1000mm (39.37 in) 1100gr - 1400gr 4 channel - 4 mini servo Axi motor 2820 KIT CONTENTS: We have organized the parts as they come out of the box for better identification during assembly.
How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution]
![How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution]](/thumbs/89/99262679.jpg "How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution]") 1! How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution] !2 How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) Introduction Terminology
1! How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution] !2 How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) Introduction Terminology
THE AIRCRAFT FLEET. UV 18-A Twin Otter (2) Pelican (2) Sentry BK 30 UAV (5) SPA-10
 Pelican (2) Sentry BK 30 UAV (5) SPA-10") THE AIRCRAFT FLEET UV 18-A Twin Otter (2) Pelican (2) Sentry BK 30 UAV (5) SPA-10 Marina Facility 3500 ft runway - manned operations only 30,000 sq ft maintenance hangar Instrumentation and Calibration
THE AIRCRAFT FLEET UV 18-A Twin Otter (2) Pelican (2) Sentry BK 30 UAV (5) SPA-10 Marina Facility 3500 ft runway - manned operations only 30,000 sq ft maintenance hangar Instrumentation and Calibration
AERO. Meet the Aero. Congratulations on your purchase of an Aero!
 AERO Congratulations on your purchase of an Aero! Please read the following sections of this manual to get started with your new autonomous aircraft. 1 Meet the Aero 7 Fly-by-wire mode 2 Safety 8 Command
AERO Congratulations on your purchase of an Aero! Please read the following sections of this manual to get started with your new autonomous aircraft. 1 Meet the Aero 7 Fly-by-wire mode 2 Safety 8 Command
Design, Build, Fly Q&A #1
 2018-19 Design, Build, Fly Q&A #1 Fuselage 1. How do you define a fuselage? How is underneath or bottom of the fuselage defined? Answer: The fuselage is defined as the main body of the airplane that is
2018-19 Design, Build, Fly Q&A #1 Fuselage 1. How do you define a fuselage? How is underneath or bottom of the fuselage defined? Answer: The fuselage is defined as the main body of the airplane that is
ROBUST AIRFRAME FOR UAV FLIGHT TESTING FOR SALE!
 ROBUST AIRFRAME FOR UAV FLIGHT TESTING FOR SALE! My team specializes in fabricating airframes that s appropriate for testing unmanned aerial vehicle components. Our airframes are made of hybrid composite
ROBUST AIRFRAME FOR UAV FLIGHT TESTING FOR SALE! My team specializes in fabricating airframes that s appropriate for testing unmanned aerial vehicle components. Our airframes are made of hybrid composite
2008 SOCATA TBM850 SN 494
 MACH 0.46 PASSENGERS 4 RANGE (NM) 1,200 AIRFRAME 1720 Hours Since New 1700 Landings Since New ENGINE: PRATT & WHITNEY PT6A-66D 3,000 TBO (3500 TBO being approved by Socata) 0 Since Hot Section by Pratt
MACH 0.46 PASSENGERS 4 RANGE (NM) 1,200 AIRFRAME 1720 Hours Since New 1700 Landings Since New ENGINE: PRATT & WHITNEY PT6A-66D 3,000 TBO (3500 TBO being approved by Socata) 0 Since Hot Section by Pratt