Innovating the future of disaster relief
|
|
|
- Bethany Garrison
- 5 years ago
- Views:
Transcription
1 Innovating the future of disaster relief American Helicopter Society International 33rd Annual Student Design Competition Graduate Student Team Submission

2 VEHICLE OVERVIEW

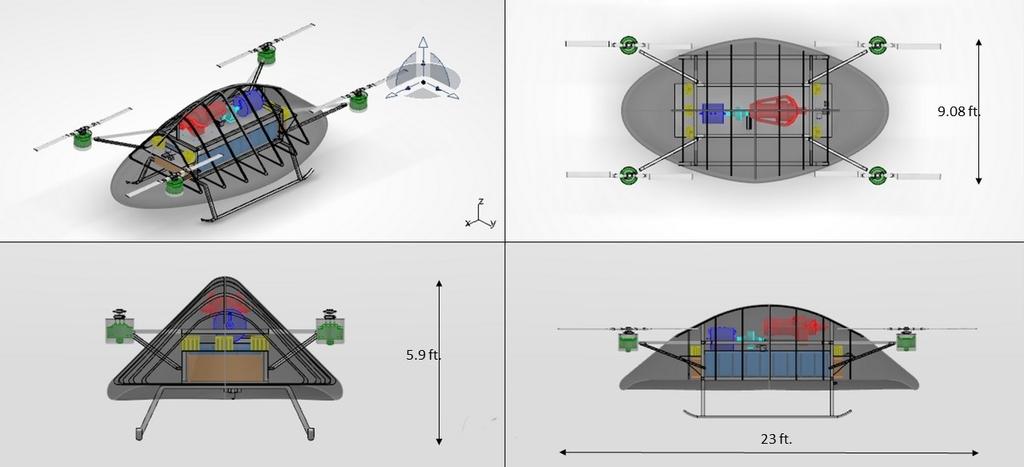
3 FOUR VIEW DRAWING
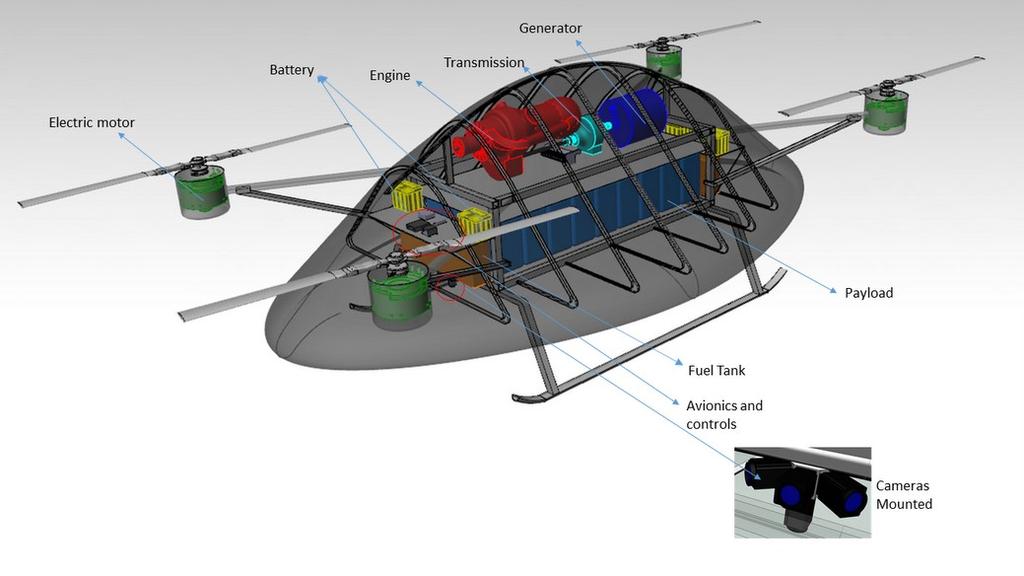
4 INTERNAL COMPONENTS


5 MISSION OVERVIEW 1. Deployment: The GT Angel is deployed from the C-130 using a gravity airdrop where the C-130 increases angle of attack until the Angel slides out of the cargo bay. 2. Descent Arrest: Immediately after deployment, the electric motors begin to turn the rotors. The Angel arrests its descent by using differential collective to create moments and thrust to slow the descent. 3. Transition to Level Flight: The vehicle begins a level flight, and uses the onboard GPS to navigate to the drop zone area. 4. Payload Delivery: In the drop zone area, the Angel descends and uses a vision-based system to identify precisely where the payload should be deployed. Once at 50 ft AGL above the drop zone, the bay doors open, and the payload is lowered to the ground. 5. Cruise Climb: Once the payload has been delivered, the delivery cable is retracted and the Angel climbs to clear mountains on its return flight. 6. Cruise: The Angel cruises at the speed for maximum range 7. Cruise Descent: Once clear of the mountains, the Angel descents to the landing zone at 4,000 ft MSL. 8. Landing: After using the GPS to approximately locate the landing zone, the Angel uses the vision-based positioning system to precisely land at the end of the mission. (9). Reserve: The Angel has enough reserve fuel to travel 10 nautical miles beyond the target 50 nautical mile mission.
6 MISSION BREAKDOWN Mission Segment Speed [kts] Distance Traveled [nm] Segment Time [min] Fuel Weight [lb] Mission Segment Speed [kts] Distance Traveled [nm] Segment Time [min] Fuel Weight [lb] 1. Deployment ~ Descent Arrest Transition to Level Flight Payload Delivery Cruise Climb Cruise Cruise Descent Landing Total (9. Reserve) The engine does not start until after deployment Hybrid Power Usage Breakdown







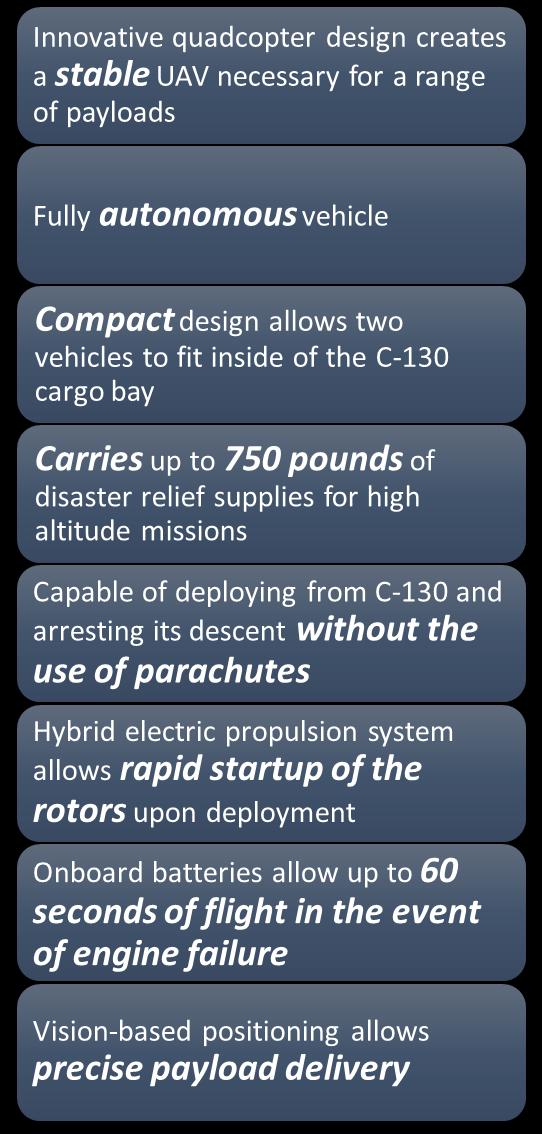
7 VISION-BASED NAVIGATION The GT Angel uses a GPS-based navigation system to reach the general area of the payload drop zone, then uses a vision-based positioning system to precisely deliver the payload. The target location subsystem works by using a Haar-like feature detector trained to recognize target and helipad features, then uses a visionbased positioning system to precisely deliver the payload. Target This navigation technique was successfully demonstrated in the 2015 AHS Micro Air Vehicle competition won by the Georgia Tech team. The Sony H11 camera gives the required resolution to identify the target from 200 ft above the ground.



8 PAYLOAD DEPLOYMENT SYSTEM Delivery Process Breeze Eastern HS-5100 Winch System The large hoisting strength allows the potential to use the GT Angel in rescue operations in addition to the supply deliver mission the vehicle was designed for.






9 PROPULSION SYSTEM The GT Angel uses a hybrid electric propulsion system that allows it to perform its unique deployment method. A turboshaft engine as well batteries provide power to the electric motors that drive the rotors. Transmission Engine Generator Power Regulator Electric Motor (x4) Batteries In the event of engine failure, the battery packs provide back up power for at least 60 seconds to allow the GT Angel to safely reach the ground.






10 PROPULSION SYSTEM The hybrid propulsion system allows for electric hover assist where the combined power of the engine and batteries is used during the high power demand portions of the mission. The turboshaft engine is therefore sized to a smaller power which decreases the weight. Turboshaft Engine Battery Packs The batteries ability to rapidly produce power (full power in under 4 seconds) is critical for the arresting the GT Angel s descent after deploying from the C-130.



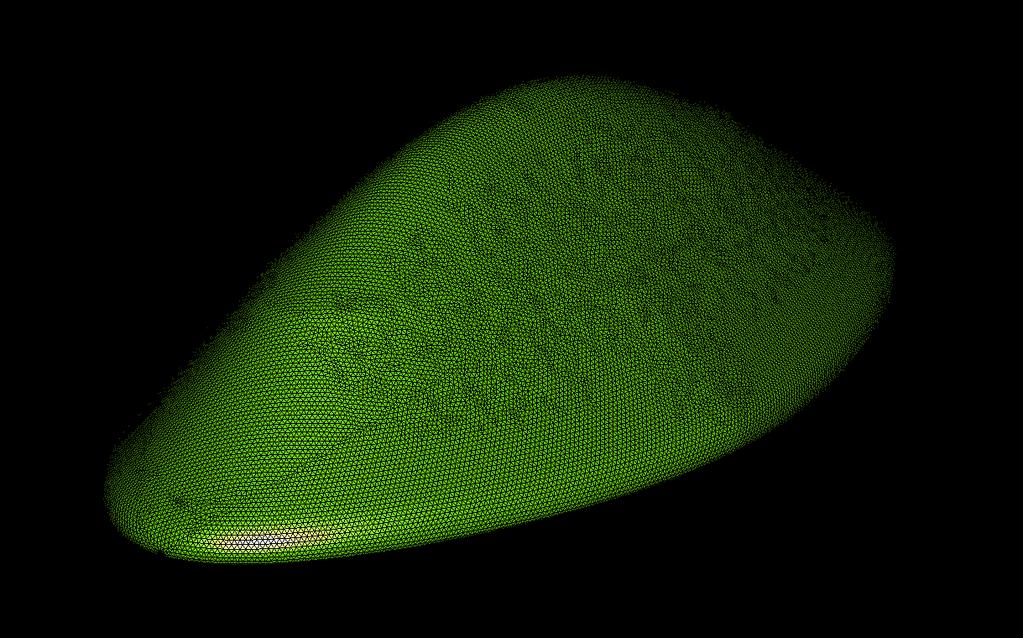
11 FUSELAGE DESIGN Air Flow Image Credit: uploads/2013/10/snake.jpg Direction of Undulation Cross Section Fuselage design was biomimetically inspired by the flying snake, a type of snake that can glide through the air despite its lack of wings. A unique feature of the flying snake is its body s cross sectional shape. As it glides through the air, the snake undulates back and forth, exposing its body s cross section to a vast range of orientations, which its favorable aerodynamic shape allows it to overcome. The fuselage was designed such that the snake's cross section was revolved elliptically about its center, resulting in a body with omni-directional favorable aerodynamic characteristics. Expected Operational Range The fuselage serves as a lifting surface both inside and outside the expected operational range, including orientations where it is upside down. If the fuselage experiences unexpected orientations due to deployment mistakes, the fuselage will still provide stability to the system and increase the likelihood of a slow, controlled landing per the mission guidelines. See the flying snake in action by clicking here.
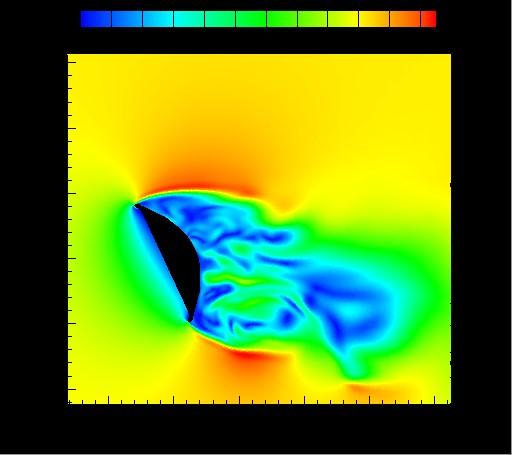
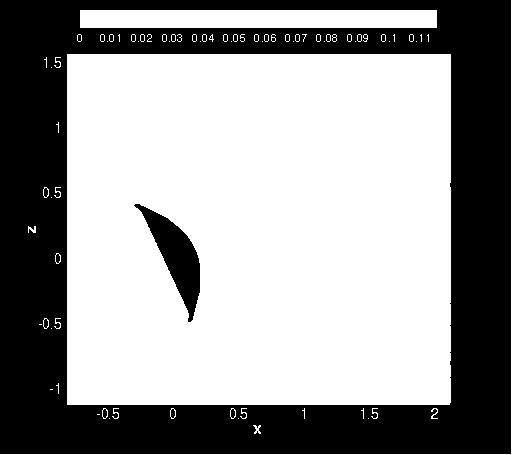
12 AERODYNAMICS Wake from unsteady HRLES simulation Animation of Unsteady wake from HRLES Simulation: (click here)



13 PERFORMANCE A blade element momentum theory (BEMT) code was developed to determine performance characteristics of the rotor blade. Results from the BEMT code were verified using RotCFD, a widely used design tool developed by SukraHelitek. The electric hover assist allows for a hover ceiling of 25,000 ft, an increase of 11,000 ft over the hover ceiling that could be achieved by the turboshaft engine alone. The nondimensional rotor inflow distribution of rotor was achieved using Castle and Dee Leeuw s linear inflow approximation. Downwash contours for rotor in hover and in forward flight. Grid used for RotCFD analysis


 The vehicle in freefall (click here). 2.")


14 ARRESTING THE DESCENT The GT Angel s fuselage design is inspired by the cross-section of the flying snakes of Southeast Asia, which are known for superior gliding characteristics with smaller surface area than other gliding animals. The hybrid electric propulsion allows the rotors to begin immediately after exiting the C-130. The arresting of the descent was modeled using a state-of-the-art bluff body aerodynamic model for the fuselage aerodynamics with a full six-degree-of-freedom dynamics model. A set of PID controllers determine the response of the rotor to stabilize the vehicle. Simulation videos of : 1.) The vehicle in freefall (click here). 2.) The vehicle with stability augmented by differential thrust of the rotors (click here). Control Model Collective Angles Actuator Disk Orientations Velocities Bluff Body Aerodynamics Model Thrusts Torques 6 DOF Dynamics Model Forces Moments With the additional stability from differential thrust of the rotors, the GT Angel can perform a controlled descent in severe turbulence. During the descent, the GT Angel maintains forward speed which avoids the potential dangers of vertical descent such as the vortex ring state. It recovers and achieves controlled level flight by 11,800 ft. Free fall trajectory Controlled trajectory Orientation angles of the GT Angel during descent modeled with severe turbulence from the Dryden turbulence model

 Recovery of the")

15 EXPERMENTAL DESCENT TESTING The descent method was inspired by real test data from scaled experiments IMU data from a 100 ft drop, demonstrated the phases of the GT Angel s descent: 1) Initial drop before the vehicle has control 2) Recovery of the descent using differential thrust 3) Controlled flight to the target location Video from the experimental recovery testing (click here)


16 COST SINGLE UNIT COST BREAKDOWN Total Unit Cost: $4,588,458 11% 1% Acquisition cost: Tooling, manufacturing labor, engineering, and quality cost based on parametric equations widely used in industry Material cost based on CATIA model material volumes and current cost per volume of each material Avionics and power plant cost based on component research survey 10% 78% Human cost : Accounts for human intervention in disaster relief missions, assuming 35 disasters per year (includes a factor of 5 in estimating disaster relief need). Fuel cost: Based on 120 pounds per fuel each mission, assuming 8 missions per day for 3 years Development cost : Estimated at $1500 per pound of empty weight 4% 21% UNIT ACQUISITION COST BREAKDOWN Acquisition Cost per Unit: $472,598 67% 6% 2% Cost per unit for 100 Units Over 3 Year Period: $812,552.67
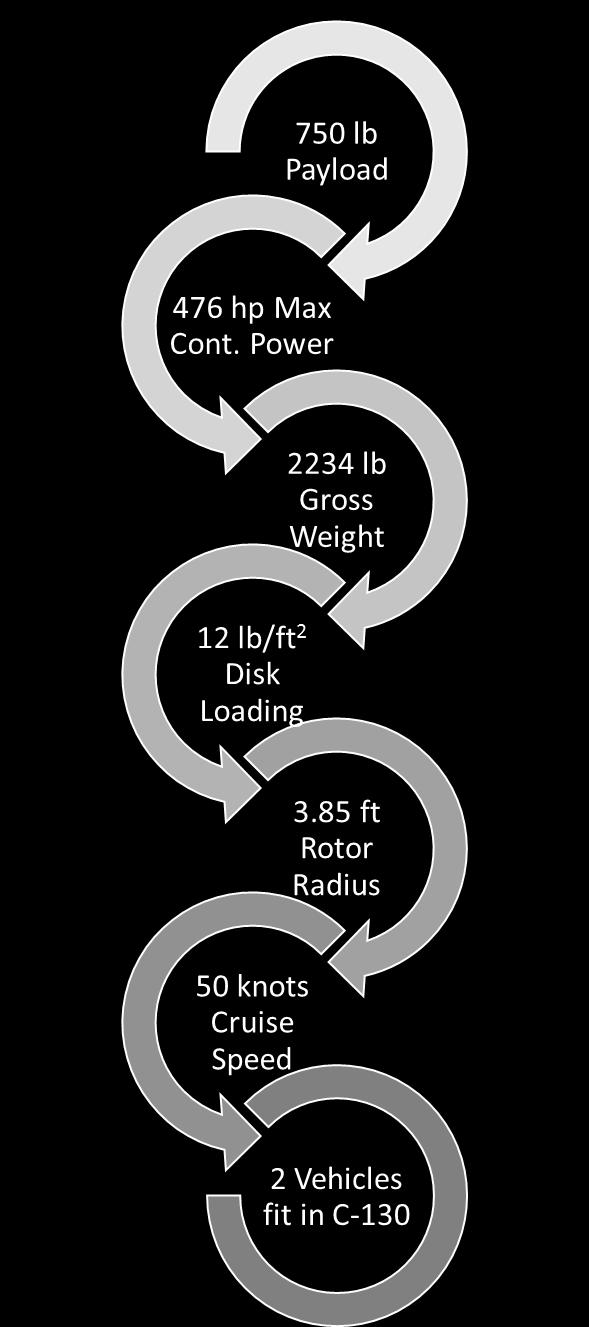
17 SUMMARY OF REQUIREMENTS The UAV must be able to carry a minimum payload weight of 500 pounds. The UAV and payload must fit in the cargo bay of a C-130. GT Angel can support a payload weight of 750 pounds. Two GT Angel UAVs can fit in the cargo bay of a C-130. The UAV must be able to deploy from the cargo bay of C-130. GT Angle deploys from the C-130 cargo bay using a gravity airdrop. The UAV must arrest its descent and transition to autonomous flight no lower than 1000 ft AGL. GT Angel arrests its descent and transitions to autonomous flight at 1800 ft AGL. The payload must be delivered from a precision no wind hover tha places the payload at precise GPS coordinates. GT Angel uses a joint GPS and vision-based navigation system to achieve precise payload delivery. The payload must touch the ground at a speed < 5 ft/s GT Angel uses a variable speed controller to ensure a touchdown speed < 5 ft/s. The delivery in hover must take no longer than 1 minute. GT Angel completes its delivery in under 1 minute.. The UAV must travel a minimum distance of 50 nm to return to base. GT Angel carries reserve fuel so that it can travel more than 50 nm to return to base.




18 Innovating the future of disaster relief
AT-10 Electric/HF Hybrid VTOL UAS
 AT-10 Electric/HF Hybrid VTOL UAS Acuity Technologies Robert Clark bob@acuitytx.com Summary The AT-10 is a tactical size hybrid propulsion VTOL UAS with a nose camera mount and a large payload bay. Propulsion
AT-10 Electric/HF Hybrid VTOL UAS Acuity Technologies Robert Clark bob@acuitytx.com Summary The AT-10 is a tactical size hybrid propulsion VTOL UAS with a nose camera mount and a large payload bay. Propulsion
Air Buzz. 32nd Annual AHS International Student Design Competition
 Air Buzz 32nd Annual AHS International Student Design Competition Faculty Advisor: Dr. Daniel Schrage, Daniel.Schrage@aerospace.gatech.edu Ezgi Selin Akdemir esakdemir@gmail.com Undergraduate Middle East
Air Buzz 32nd Annual AHS International Student Design Competition Faculty Advisor: Dr. Daniel Schrage, Daniel.Schrage@aerospace.gatech.edu Ezgi Selin Akdemir esakdemir@gmail.com Undergraduate Middle East
Georgia Tech NASA Critical Design Review Teleconference Presented By: Georgia Tech Team ARES
 Georgia Tech NASA Critical Design Review Teleconference Presented By: Georgia Tech Team ARES 1 Agenda 1. Team Overview (1 Min) 2. 3. 4. 5. 6. 7. Changes Since Proposal (1 Min) Educational Outreach (1 Min)
Georgia Tech NASA Critical Design Review Teleconference Presented By: Georgia Tech Team ARES 1 Agenda 1. Team Overview (1 Min) 2. 3. 4. 5. 6. 7. Changes Since Proposal (1 Min) Educational Outreach (1 Min)
Preface. Acknowledgments. List of Tables. Nomenclature: organizations. Nomenclature: acronyms. Nomenclature: main symbols. Nomenclature: Greek symbols
 Contents Preface Acknowledgments List of Tables Nomenclature: organizations Nomenclature: acronyms Nomenclature: main symbols Nomenclature: Greek symbols Nomenclature: subscripts/superscripts Supplements
Contents Preface Acknowledgments List of Tables Nomenclature: organizations Nomenclature: acronyms Nomenclature: main symbols Nomenclature: Greek symbols Nomenclature: subscripts/superscripts Supplements
Executive Summary. Nanjing University of Aeronautics and Astronautics
 Executive Summary 29 MAY 2016 Undergraduate Design Report Executive Summary 1 Mission Requirements In response to the Design Competition sponsored by Bell Helicopter, the aim of NUAA Undergraduate Team
Executive Summary 29 MAY 2016 Undergraduate Design Report Executive Summary 1 Mission Requirements In response to the Design Competition sponsored by Bell Helicopter, the aim of NUAA Undergraduate Team
31 st Annual American Helicopter Society Student Design Competition: Graduate Submission
 Rotorcraft Adaptive and Morphing Structures Lab The Emperor UAV: Executive Summary George Jacobellis Alex Angilella Jean-Paul Reddinger Andrew Howard Matthew Misiorowski Michael Pontecorvo Jayanth Krishnamurthi
Rotorcraft Adaptive and Morphing Structures Lab The Emperor UAV: Executive Summary George Jacobellis Alex Angilella Jean-Paul Reddinger Andrew Howard Matthew Misiorowski Michael Pontecorvo Jayanth Krishnamurthi
MI-26T Super Heavy Lift Helicopter Demonstration: Whitecourt Alberta. Highlights and Photos
 MI-26T Super Heavy Lift Helicopter Demonstration: Whitecourt Alberta December 1, 2006 Highlights and Photos 1 MI-26T Super Heavy Lift Helicopter Internal dimensions & lifting capacities = C-130 Hercules:
MI-26T Super Heavy Lift Helicopter Demonstration: Whitecourt Alberta December 1, 2006 Highlights and Photos 1 MI-26T Super Heavy Lift Helicopter Internal dimensions & lifting capacities = C-130 Hercules:
A Reconfigurable Rotor for 24 Hour Hovering
 A Reconfigurable Rotor for 24 Hour Hovering AHS 34 th Annual Student Design Competition Advisor at Georgia Institute of Technology Professor Daniel Schrage Daniel.Schrage@gatech.edu Advisor at Université
A Reconfigurable Rotor for 24 Hour Hovering AHS 34 th Annual Student Design Competition Advisor at Georgia Institute of Technology Professor Daniel Schrage Daniel.Schrage@gatech.edu Advisor at Université
In response to. 34th Annual AHS International Student Design Competition IIT KANPUR INDIAN INSTITUTE OF TECHNOLOGY, KANPUR
 In response to 34th Annual AHS International Student Design Competition By 2017 VIBHRAM AIRFRAME 4-VIEW ISOMETRIC TOP FRONT SIDE HELICOPTER SYSTEMS OVERVIEW Landing Gear Light weight and high strength
In response to 34th Annual AHS International Student Design Competition By 2017 VIBHRAM AIRFRAME 4-VIEW ISOMETRIC TOP FRONT SIDE HELICOPTER SYSTEMS OVERVIEW Landing Gear Light weight and high strength
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July ISSN BY B.MADHAN KUMAR
 International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 485 FLYING HOVER BIKE, A SMALL AERIAL VEHICLE FOR COMMERCIAL OR. SURVEYING PURPOSES BY B.MADHAN KUMAR Department
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 485 FLYING HOVER BIKE, A SMALL AERIAL VEHICLE FOR COMMERCIAL OR. SURVEYING PURPOSES BY B.MADHAN KUMAR Department
AIAA Foundation Undergraduate Team Aircraft Design Competition. RFP: Cruise Missile Carrier
 AIAA Foundation Undergraduate Team Aircraft Design Competition RFP: Cruise Missile Carrier 1999/2000 AIAA FOUNDATION Undergraduate Team Aircraft Design Competition I. RULES 1. All groups of three to ten
AIAA Foundation Undergraduate Team Aircraft Design Competition RFP: Cruise Missile Carrier 1999/2000 AIAA FOUNDATION Undergraduate Team Aircraft Design Competition I. RULES 1. All groups of three to ten
Key Drivers for evtol Design Christopher Silva From VTOL to evtol Workshop May 24, 2018
 Key Drivers for evtol Design Christopher Silva From VTOL to evtol Workshop May 24, 2018 Can we use what we already know? Techniques and processes Aircraft / System design theory: Design Thinking, MDAO,
Key Drivers for evtol Design Christopher Silva From VTOL to evtol Workshop May 24, 2018 Can we use what we already know? Techniques and processes Aircraft / System design theory: Design Thinking, MDAO,
MAV and UAV Research at Rochester Institute of Technology. Rochester Institute of Technology
 MAV and UAV Research at Andrew Streett 5 th year BS/MS Student 2005-2006 MAV Team Lead Jason Grow BS/MS Graduate of RIT 2003-2004 MAV Team Lead Boeing Phantom Works, HB 714-372-9026 jason.a.grow@boeing.com
MAV and UAV Research at Andrew Streett 5 th year BS/MS Student 2005-2006 MAV Team Lead Jason Grow BS/MS Graduate of RIT 2003-2004 MAV Team Lead Boeing Phantom Works, HB 714-372-9026 jason.a.grow@boeing.com
AN ADVANCED COUNTER-ROTATING DISK WING AIRCRAFT CONCEPT Program Update. Presented to NIAC By Carl Grant November 9th, 1999
 AN ADVANCED COUNTER-ROTATING DISK WING AIRCRAFT CONCEPT Program Update Presented to NIAC By Carl Grant November 9th, 1999 DIVERSITECH, INC. Phone: (513) 772-4447 Fax: (513) 772-4476 email: carl.grant@diversitechinc.com
AN ADVANCED COUNTER-ROTATING DISK WING AIRCRAFT CONCEPT Program Update Presented to NIAC By Carl Grant November 9th, 1999 DIVERSITECH, INC. Phone: (513) 772-4447 Fax: (513) 772-4476 email: carl.grant@diversitechinc.com
Critical Design Review
 Critical Design Review University of Illinois at Urbana-Champaign NASA Student Launch 2017-2018 Illinois Space Society 1 Overview Illinois Space Society 2 Launch Vehicle Summary Javier Brown Illinois Space
Critical Design Review University of Illinois at Urbana-Champaign NASA Student Launch 2017-2018 Illinois Space Society 1 Overview Illinois Space Society 2 Launch Vehicle Summary Javier Brown Illinois Space
Designing evtol for the Mission NDARC NASA Design and Analysis of Rotorcraft. Wayne Johnson From VTOL to evtol Workshop May 24, 2018
 Designing evtol for the Mission NDARC NASA Design and Analysis of Rotorcraft Wayne Johnson From VTOL to evtol Workshop May 24, 2018 1 Conceptual Design of evtol Aircraft Conceptual design Define aircraft
Designing evtol for the Mission NDARC NASA Design and Analysis of Rotorcraft Wayne Johnson From VTOL to evtol Workshop May 24, 2018 1 Conceptual Design of evtol Aircraft Conceptual design Define aircraft
BY HOEYCOMB AEROSPACE TECHNOLOGIES. HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV
 BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
Appenidix E: Freewing MAE UAV analysis
 Appenidix E: Freewing MAE UAV analysis The vehicle summary is presented in the form of plots and descriptive text. Two alternative mission altitudes were analyzed and both meet the desired mission duration.
Appenidix E: Freewing MAE UAV analysis The vehicle summary is presented in the form of plots and descriptive text. Two alternative mission altitudes were analyzed and both meet the desired mission duration.
High aspect ratio for high endurance. Mechanical simplicity. Low empty weight. STOVL or STOL capability. And for the propulsion system:
 Idealized tilt-thrust (U) All of the UAV options that we've been able to analyze suffer from some deficiency. A diesel, fixed-wing UAV could possibly satisfy the range and endurance objectives, but integration
Idealized tilt-thrust (U) All of the UAV options that we've been able to analyze suffer from some deficiency. A diesel, fixed-wing UAV could possibly satisfy the range and endurance objectives, but integration
FLIGHT DYNAMICS AND CONTROL OF A ROTORCRAFT TOWING A SUBMERGED LOAD
 FLIGHT DYNAMICS AND CONTROL OF A ROTORCRAFT TOWING A SUBMERGED LOAD Ananth Sridharan Ph.D. Candidate Roberto Celi Professor Alfred Gessow Rotorcraft Center Department of Aerospace Engineering University
FLIGHT DYNAMICS AND CONTROL OF A ROTORCRAFT TOWING A SUBMERGED LOAD Ananth Sridharan Ph.D. Candidate Roberto Celi Professor Alfred Gessow Rotorcraft Center Department of Aerospace Engineering University
Flight Readiness Review
 Flight Readiness Review University of Illinois at Urbana-Champaign NASA Student Launch 2017-2018 Illinois Space Society 1 Overview Illinois Space Society 2 Launch Vehicle Summary Javier Brown Illinois
Flight Readiness Review University of Illinois at Urbana-Champaign NASA Student Launch 2017-2018 Illinois Space Society 1 Overview Illinois Space Society 2 Launch Vehicle Summary Javier Brown Illinois
How the V-22 Osprey Works
 How the V-22 Osprey Works It has long been a dream of aircraft designers to create an airplane that not only can fly long ranges at high speeds and carry heavy cargo, but can also take off, hover and land
How the V-22 Osprey Works It has long been a dream of aircraft designers to create an airplane that not only can fly long ranges at high speeds and carry heavy cargo, but can also take off, hover and land
FLYEYE Unmanned Aerial System
 FLYEYE Unmanned Aerial System FLYEYE Unmanned Aerial System About Flytronic FLYTRONIC is a dynamic modern engineering company focussed on developing Unmanned Aerial Systems to provide observation and reconnaissance
FLYEYE Unmanned Aerial System FLYEYE Unmanned Aerial System About Flytronic FLYTRONIC is a dynamic modern engineering company focussed on developing Unmanned Aerial Systems to provide observation and reconnaissance
Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business. Real-time Mechanism and System Simulation To Support Flight Simulators
 Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business Real-time Mechanism and System Simulation To Support Flight Simulators Smarter decisions, better products. Contents Introduction
Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business Real-time Mechanism and System Simulation To Support Flight Simulators Smarter decisions, better products. Contents Introduction
This Flight Planning Guide is published for the purpose of providing specific information for evaluating the performance of the Cessna Corvalis TT.
 May 2010 TABLE OF CONTENTS This Flight Planning Guide is published for the purpose of providing specific information for evaluating the performance of the Cessna Corvalis TT. This guide is developed from
May 2010 TABLE OF CONTENTS This Flight Planning Guide is published for the purpose of providing specific information for evaluating the performance of the Cessna Corvalis TT. This guide is developed from
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
Case Study: ParaShield
 Case Study: ParaShield Origin of ParaShield Concept ParaShield Flight Test Wind Tunnel Testing Future Applications U N I V E R S I T Y O F MARYLAND 2012 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu
Case Study: ParaShield Origin of ParaShield Concept ParaShield Flight Test Wind Tunnel Testing Future Applications U N I V E R S I T Y O F MARYLAND 2012 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu
Overview. Mission Overview Payload and Subsystems Rocket and Subsystems Management
 MIT ROCKET TEAM Overview Mission Overview Payload and Subsystems Rocket and Subsystems Management Purpose and Mission Statement Our Mission: Use a rocket to rapidly deploy a UAV capable of completing search
MIT ROCKET TEAM Overview Mission Overview Payload and Subsystems Rocket and Subsystems Management Purpose and Mission Statement Our Mission: Use a rocket to rapidly deploy a UAV capable of completing search
Auburn University Student Launch. PDR Presentation November 16, 2015
 Auburn University Student Launch PDR Presentation November 16, 2015 Project Aquila Vehicle Dimensions Total Length of 69.125 inches Inner Diameter of 5 inches Outer Diameter of 5.25 inches Estimated mass
Auburn University Student Launch PDR Presentation November 16, 2015 Project Aquila Vehicle Dimensions Total Length of 69.125 inches Inner Diameter of 5 inches Outer Diameter of 5.25 inches Estimated mass
Electric Drive - Magnetic Suspension Rotorcraft Technologies
 Electric Drive - Suspension Rotorcraft Technologies William Nunnally Chief Scientist SunLase, Inc. Sapulpa, OK 74066-6032 wcn.sunlase@gmail.com ABSTRACT The recent advances in electromagnetic technologies
Electric Drive - Suspension Rotorcraft Technologies William Nunnally Chief Scientist SunLase, Inc. Sapulpa, OK 74066-6032 wcn.sunlase@gmail.com ABSTRACT The recent advances in electromagnetic technologies
AirEZ. Executive Summary. American Helicopter Society International 32 nd Annual Student Design Competition Graduate Student Team Submission
 AirEZ Executive Summary American Helicopter Society International 32 nd Annual Student Design Competition Graduate Student Team Submission Overview: AirEZ Vehicle Battery 2.04 kw-hr lithium-sulfur battery
AirEZ Executive Summary American Helicopter Society International 32 nd Annual Student Design Competition Graduate Student Team Submission Overview: AirEZ Vehicle Battery 2.04 kw-hr lithium-sulfur battery
Autonomous inverted helicopter flight via reinforcement learning
 Autonomous inverted helicopter flight via reinforcement learning Andrew Y. Ng, Adam Coates, Mark Diel, Varun Ganapathi, Jamie Schulte, Ben Tse, Eric Berger, and Eric Liang By Varun Grover Outline! Helicopter
Autonomous inverted helicopter flight via reinforcement learning Andrew Y. Ng, Adam Coates, Mark Diel, Varun Ganapathi, Jamie Schulte, Ben Tse, Eric Berger, and Eric Liang By Varun Grover Outline! Helicopter
WAGNER CONCEPTS: The Valkyrie An Unmanned Air Launched Disaster Relief Quadrotor Executive Summary
 WAGNER CONCEPTS: The Valkyrie An Unmanned Air Launched Disaster Relief Quadrotor Executive Summary 33rd Annual American Helicopter Society International Student Design Competition Jada Green, Colin Gurry,
WAGNER CONCEPTS: The Valkyrie An Unmanned Air Launched Disaster Relief Quadrotor Executive Summary 33rd Annual American Helicopter Society International Student Design Competition Jada Green, Colin Gurry,
for Unmanned Aircraft
 Damage age Tolerant Flight Control o Systems s for Unmanned Aircraft September 17, 28 Vlad Gavrilets, Ph.D. Approved for public release, distribution unlimited Rockwell Collins Control Technologies - Formerly
Damage age Tolerant Flight Control o Systems s for Unmanned Aircraft September 17, 28 Vlad Gavrilets, Ph.D. Approved for public release, distribution unlimited Rockwell Collins Control Technologies - Formerly
Gyroplane questions from Rotorcraft Commercial Bank (From Rotorcraft questions that obviously are either gyroplane or not helicopter)
") Page-1 Gyroplane questions from Rotorcraft Commercial Bank (From Rotorcraft questions that obviously are either gyroplane or not helicopter) "X" in front of the answer indicates the likely correct answer.
Page-1 Gyroplane questions from Rotorcraft Commercial Bank (From Rotorcraft questions that obviously are either gyroplane or not helicopter) "X" in front of the answer indicates the likely correct answer.
In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various
 25 6 18 In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various applications such as buildings maintenance, security and
25 6 18 In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various applications such as buildings maintenance, security and
Presentation Outline. # Title
 FRR Presentation 1 Presentation Outline # Title 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 Team Introduction Mission Summary Vehicle Overview Vehicle Dimensions Upper Body Section Elliptical
FRR Presentation 1 Presentation Outline # Title 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 Team Introduction Mission Summary Vehicle Overview Vehicle Dimensions Upper Body Section Elliptical
Overview of NASA Vertical Lift Noise Research and Facilities
 National Aeronautics and Space Administration Overview of NASA Vertical Lift Noise Research and Facilities Susan A. Gorton Project Manager, Revolutionary Vertical Lift Technology April 20-21, 2017 Aircraft
National Aeronautics and Space Administration Overview of NASA Vertical Lift Noise Research and Facilities Susan A. Gorton Project Manager, Revolutionary Vertical Lift Technology April 20-21, 2017 Aircraft
POWER ESTIMATION FOR FOUR SEATER HELICOPTER
 Jurnal Mekanikal December 2008, No. 27, 78-90 POWER ESTIMATION FOR FOUR SEATER HELICOPTER Ahmad Azlan Shah B. Ibrahim Mohammad Nazri Mohd Jaafar * Faculty of Mechanical Engineering University Technology
Jurnal Mekanikal December 2008, No. 27, 78-90 POWER ESTIMATION FOR FOUR SEATER HELICOPTER Ahmad Azlan Shah B. Ibrahim Mohammad Nazri Mohd Jaafar * Faculty of Mechanical Engineering University Technology
DRONE & UAV.
 www.erapkorea.co.kr DRONE & UAV Extended flight time Proven to be reliable, safe and easy to use Various fields of operation Completely autonomous, and manually controlled ERAP DRONE & UAV WHY ERAP s MAPPING
www.erapkorea.co.kr DRONE & UAV Extended flight time Proven to be reliable, safe and easy to use Various fields of operation Completely autonomous, and manually controlled ERAP DRONE & UAV WHY ERAP s MAPPING
SEE FURTHER. GO ANYWHERE
 GrandNew EMS SEE FURTHER. GO ANYWHERE ADVANCED CAPABILITY FOR EMERGENCY MEDICAL SERVICES The GrandNew is a modern top-of-the-range light twin rotorcraft offering outstanding performance, speed, payload,
GrandNew EMS SEE FURTHER. GO ANYWHERE ADVANCED CAPABILITY FOR EMERGENCY MEDICAL SERVICES The GrandNew is a modern top-of-the-range light twin rotorcraft offering outstanding performance, speed, payload,
Flight Readiness Review Addendum: Full-Scale Re-Flight. Roll Induction and Counter Roll NASA University Student Launch.
 Flight Readiness Review Addendum: Full-Scale Re-Flight Roll Induction and Counter Roll 2016-2017 NASA University Student Launch 27 March 2017 Propulsion Research Center, 301 Sparkman Dr. NW, Huntsville
Flight Readiness Review Addendum: Full-Scale Re-Flight Roll Induction and Counter Roll 2016-2017 NASA University Student Launch 27 March 2017 Propulsion Research Center, 301 Sparkman Dr. NW, Huntsville
Clean Sky 2. LifeCraft Demonstrationt (IADP RC 2 & ITDs) Consultation meetings Brussels th December 2012 OUTLINE
 Consultation meetings Brussels th December 2012 OUTLINE") Clean Sky 2 LifeCraft Demonstrationt (IADP RC 2 & ITDs) Consultation meetings Brussels 10-14 th December 2012 1 1 LifeCraft - The Compound Demo OUTLINE Presentation of the Compound R/C Concept Impact &
Clean Sky 2 LifeCraft Demonstrationt (IADP RC 2 & ITDs) Consultation meetings Brussels 10-14 th December 2012 1 1 LifeCraft - The Compound Demo OUTLINE Presentation of the Compound R/C Concept Impact &
North American F-86F Sabre USER MANUAL. Virtavia F-86F Sabre DTG Steam Edition Manual Version 1
 North American F-86F Sabre USER MANUAL 0 Introduction The F-86 Sabre was a natural replacement for the F-80 Shooting Star. First introduced in 1949 for the United States Air Force, the F-86 featured excellent
North American F-86F Sabre USER MANUAL 0 Introduction The F-86 Sabre was a natural replacement for the F-80 Shooting Star. First introduced in 1949 for the United States Air Force, the F-86 featured excellent
Boeing B-47 Stratojet USER MANUAL. Virtavia B-47E Stratojet DTG Steam Edition Manual Version 2
 Boeing B-47 Stratojet USER MANUAL 0 Introduction The Boeing B-47 was the first swept-wing multi-engine bomber in service with the USAF. It was truly a quantum leap in aviation history, and is the forerunner
Boeing B-47 Stratojet USER MANUAL 0 Introduction The Boeing B-47 was the first swept-wing multi-engine bomber in service with the USAF. It was truly a quantum leap in aviation history, and is the forerunner
Electric VTOL Aircraft
 Electric VTOL Aircraft Subscale Prototyping Overview Francesco Giannini fgiannini@aurora.aero 1 08 June 8 th, 2017 Contents Intro to Aurora Motivation & approach for the full-scale vehicle Technical challenges
Electric VTOL Aircraft Subscale Prototyping Overview Francesco Giannini fgiannini@aurora.aero 1 08 June 8 th, 2017 Contents Intro to Aurora Motivation & approach for the full-scale vehicle Technical challenges
In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led
 was founded by current company President Alexander Zakharov, since then he has led") A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
PROJECT AQUILA 211 ENGINEERING DRIVE AUBURN, AL POST LAUNCH ASSESSMENT REVIEW
 PROJECT AQUILA 211 ENGINEERING DRIVE AUBURN, AL 36849 POST LAUNCH ASSESSMENT REVIEW APRIL 29, 2016 Motor Specifications The team originally planned to use an Aerotech L-1520T motor and attempted four full
PROJECT AQUILA 211 ENGINEERING DRIVE AUBURN, AL 36849 POST LAUNCH ASSESSMENT REVIEW APRIL 29, 2016 Motor Specifications The team originally planned to use an Aerotech L-1520T motor and attempted four full
Helicopter Noise and Vibration (EU Project "HELINOVI")
") Helicopter Noise and Vibration (EU Project "HELINOVI") Hans-Jürgen Langer, DLR Aeronautics Days 19th/21st June 2006, Vienna Overview Motivation Acoustic Problem Vibration Problem Partners Tools - Configurations
Helicopter Noise and Vibration (EU Project "HELINOVI") Hans-Jürgen Langer, DLR Aeronautics Days 19th/21st June 2006, Vienna Overview Motivation Acoustic Problem Vibration Problem Partners Tools - Configurations
German Aerospace Center Flight Operations
 German Aerospace Center Flight Operations Introduction DLR is Germany s aerospace research center and space agency with about 4700 employees in 31 research institutes distributed over 8 main research centers
German Aerospace Center Flight Operations Introduction DLR is Germany s aerospace research center and space agency with about 4700 employees in 31 research institutes distributed over 8 main research centers
Auburn University. Project Wall-Eagle FRR
 Auburn University Project Wall-Eagle FRR Rocket Design Rocket Model Mass Estimates Booster Section Mass(lb.) Estimated Upper Section Mass(lb.) Actual Component Mass(lb.) Estimated Mass(lb.) Actual Component
Auburn University Project Wall-Eagle FRR Rocket Design Rocket Model Mass Estimates Booster Section Mass(lb.) Estimated Upper Section Mass(lb.) Actual Component Mass(lb.) Estimated Mass(lb.) Actual Component
Team Introduction Competition Background Current Situation Project Goals Stakeholders Use Scenario Customer Needs Engineering Requirements
 Team Introduction Competition Background Current Situation Project Goals Stakeholders Use Scenario Customer Needs Engineering Requirements Constraints Project Plan Risk Analysis Questions Christopher Jones
Team Introduction Competition Background Current Situation Project Goals Stakeholders Use Scenario Customer Needs Engineering Requirements Constraints Project Plan Risk Analysis Questions Christopher Jones
Aerial robots that interact with the environment
 Aerial robots that interact with the environment Guillermo Heredia*, Aníbal Ollero * Professor at University of Seville, Spain Robotics, Vision and Control group (GRVC) guiller@us.es Robotics, Vision and
Aerial robots that interact with the environment Guillermo Heredia*, Aníbal Ollero * Professor at University of Seville, Spain Robotics, Vision and Control group (GRVC) guiller@us.es Robotics, Vision and
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
THE KARANTANIA UNMANNED AERIAL SYSTEM
 THE KARANTANIA UNMANNED AERIAL SYSTEM ABSTRACT Tomaž Meze, Bogo Štempihar, Mihael Grom MIBO MODLI d.o.o. Čevica 6, SI 1370 Logatec, Slovenia tomi.meze@siol.net, info@mibojets.com Tone Magister University
THE KARANTANIA UNMANNED AERIAL SYSTEM ABSTRACT Tomaž Meze, Bogo Štempihar, Mihael Grom MIBO MODLI d.o.o. Čevica 6, SI 1370 Logatec, Slovenia tomi.meze@siol.net, info@mibojets.com Tone Magister University
Modeling, Structural & CFD Analysis and Optimization of UAV
 Modeling, Structural & CFD Analysis and Optimization of UAV Dr Lazaros Tsioraklidis Department of Unified Engineering InterFEA Engineering, Tantalou 7 Thessaloniki GREECE Next Generation tools for UAV
Modeling, Structural & CFD Analysis and Optimization of UAV Dr Lazaros Tsioraklidis Department of Unified Engineering InterFEA Engineering, Tantalou 7 Thessaloniki GREECE Next Generation tools for UAV
CRITICAL DESIGN PRESENTATION
 CRITICAL DESIGN PRESENTATION UNIVERSITY OF SOUTH ALABAMA LAUNCH SOCIETY BILL BROWN, BEECHER FAUST, ROCKWELL GARRIDO, CARSON SCHAFF, MICHAEL WIESNETH, MATTHEW WOJCIECHOWSKI ADVISOR: CARLOS MONTALVO MENTOR:
CRITICAL DESIGN PRESENTATION UNIVERSITY OF SOUTH ALABAMA LAUNCH SOCIETY BILL BROWN, BEECHER FAUST, ROCKWELL GARRIDO, CARSON SCHAFF, MICHAEL WIESNETH, MATTHEW WOJCIECHOWSKI ADVISOR: CARLOS MONTALVO MENTOR:
Configuration Selection
 GRIFFIN Configuration Selection Vehicle Defining Challenges 240 knots Cruise Speed 6000 m Altitude Maximizing Prop-Rotor Efficiency Reduction of Wind Download Maximizing Fuel Storage Minimizing Weight
GRIFFIN Configuration Selection Vehicle Defining Challenges 240 knots Cruise Speed 6000 m Altitude Maximizing Prop-Rotor Efficiency Reduction of Wind Download Maximizing Fuel Storage Minimizing Weight
A CFD-Based Approach to Coaxial Rotor Hover Performance Using Actuator Disks. Jonathan Chiew
 A CFD-Based Approach to Coaxial Rotor Hover Performance Using Actuator Disks Jonathan Chiew AE4699 - Spring 007 Dr. Lakshmi Sankar Georgia Institute of Technology Table of Contents Table of Contents Introduction
A CFD-Based Approach to Coaxial Rotor Hover Performance Using Actuator Disks Jonathan Chiew AE4699 - Spring 007 Dr. Lakshmi Sankar Georgia Institute of Technology Table of Contents Table of Contents Introduction
Innovation Takes Off
 Innovation Takes Off Clean Sky 2 Information Day Bonn, 20 February 2014 Fast Rotorcraft IADP: LifeRCraft Compound Rotorcraft Hans Barnerssoi, Airbus Helicopters Innovation Takes Off LifeRCraft 1 - The
Innovation Takes Off Clean Sky 2 Information Day Bonn, 20 February 2014 Fast Rotorcraft IADP: LifeRCraft Compound Rotorcraft Hans Barnerssoi, Airbus Helicopters Innovation Takes Off LifeRCraft 1 - The
AW139 Law Enforcement
 AW139 Law Enforcement SIMPLY NO RIVALS ALL-SEEING EYE IN THE SKY The AW139 has been developed to exceed the rigorous standards of federal, state and local airborne law enforcement authorities. With the
AW139 Law Enforcement SIMPLY NO RIVALS ALL-SEEING EYE IN THE SKY The AW139 has been developed to exceed the rigorous standards of federal, state and local airborne law enforcement authorities. With the
For Missions Accomplished. Whatever the missions, whatever the times, wherever the places, we ll get you where you re going.
 For Missions Accomplished Whatever the missions, whatever the times, wherever the places, we ll get you where you re going. A Swiss Made Helicopter Kopter Group was founded for the purpose of developing,
For Missions Accomplished Whatever the missions, whatever the times, wherever the places, we ll get you where you re going. A Swiss Made Helicopter Kopter Group was founded for the purpose of developing,
CRITICAL DESIGN REVIEW. University of South Florida Society of Aeronautics and Rocketry
 CRITICAL DESIGN REVIEW University of South Florida Society of Aeronautics and Rocketry 2017-2018 AGENDA 1. Launch Vehicle 2. Recovery 3. Testing 4. Subscale Vehicle 5. Payload 6. Educational Outreach 7.
CRITICAL DESIGN REVIEW University of South Florida Society of Aeronautics and Rocketry 2017-2018 AGENDA 1. Launch Vehicle 2. Recovery 3. Testing 4. Subscale Vehicle 5. Payload 6. Educational Outreach 7.
Power Estimation for a Two Seater Helicopter
 Power Estimation for a Two Seater Helicopter JTSE Mohammad Nazri Mohd Jaafar, a,* Mohd Idham Mohd Nayan, a M.S.A. Ishak, b a Department of Aeronautical Engineering, Faculty of Mechanical Engineering, Universiti
Power Estimation for a Two Seater Helicopter JTSE Mohammad Nazri Mohd Jaafar, a,* Mohd Idham Mohd Nayan, a M.S.A. Ishak, b a Department of Aeronautical Engineering, Faculty of Mechanical Engineering, Universiti
Unmanned Air Vehicles (UAVs): Classification, Legislation and Future applications Presenter: Dr-Ing Dimitrios E. Mazarakos
: Classification, Legislation and Future applications Presenter: Dr-Ing Dimitrios E. Mazarakos") Unmanned Air Vehicles (UAVs): Classification, Legislation and Future applications Presenter: Dr-Ing Dimitrios E. Mazarakos The presenter Dr-Ing Dimitrios E. Mazarakos Dipl. in Mechanical Engineering and
Unmanned Air Vehicles (UAVs): Classification, Legislation and Future applications Presenter: Dr-Ing Dimitrios E. Mazarakos The presenter Dr-Ing Dimitrios E. Mazarakos Dipl. in Mechanical Engineering and
Light Single Multi-Purpose Helicopter
 Light Single Multi-Purpose Helicopter THE IDEAL ENTRY POINT TO THE TURBINE HELICOPTER SEGMENT Excellent flying qualities and high inherent safety make the SW-4 an optimum helicopter to transport up to
Light Single Multi-Purpose Helicopter THE IDEAL ENTRY POINT TO THE TURBINE HELICOPTER SEGMENT Excellent flying qualities and high inherent safety make the SW-4 an optimum helicopter to transport up to
AW119Kx FAST AND FLEXIBLE
 AW119Kx FAST AND FLEXIBLE DELIVERING PERFORMANCE The AW119Kx is the fast, light single engine helicopter from AgustaWestland. High productivity, excellent flying qualities, high controllability and manoeuvrability,
AW119Kx FAST AND FLEXIBLE DELIVERING PERFORMANCE The AW119Kx is the fast, light single engine helicopter from AgustaWestland. High productivity, excellent flying qualities, high controllability and manoeuvrability,
AW139. Search and Rescue SIMPLY NO RIVALS
 AW139 Search and Rescue SIMPLY NO RIVALS PERFORMING IN ALL CONDITIONS The AW139 is the market-leading intermediate twin-engine helicopter. Designed specifically to meet the multi-mission demands of a broad
AW139 Search and Rescue SIMPLY NO RIVALS PERFORMING IN ALL CONDITIONS The AW139 is the market-leading intermediate twin-engine helicopter. Designed specifically to meet the multi-mission demands of a broad
Jay Gundlach AIAA EDUCATION SERIES. Manassas, Virginia. Joseph A. Schetz, Editor-in-Chief. Blacksburg, Virginia. Aurora Flight Sciences
 Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
A FLYING EJECTION SEAT. By R. H. Hollrock* and J. J. Barzda* ABSTRACT
 ijt'9y%., A FLYING EJECTION SEAT By R. H. Hollrock* and J. J. Barzda* ABSTRACT To increase aircrewmen's chances for safe rescue in combat zones, the armed forces are investigating advanced escape and rescue
ijt'9y%., A FLYING EJECTION SEAT By R. H. Hollrock* and J. J. Barzda* ABSTRACT To increase aircrewmen's chances for safe rescue in combat zones, the armed forces are investigating advanced escape and rescue
BAYLOR UNIVERSITY DEPARTMENT OF ENGINEERING. EGR 4347 Analysis and Design of Propulsion Systems Fall 2002 ASSIGNMENT GUIDELINES
 BAYLOR UNIVERSITY DEPARTMENT OF ENGINEERING EGR 4347 Analysis and Design of Propulsion Systems Fall 2002 Design Project I Dr Van Treuren 100 points ASSIGNMENT GUIDELINES For this assignment, you may work
BAYLOR UNIVERSITY DEPARTMENT OF ENGINEERING EGR 4347 Analysis and Design of Propulsion Systems Fall 2002 Design Project I Dr Van Treuren 100 points ASSIGNMENT GUIDELINES For this assignment, you may work
AW119Kx MORE VALUE FOR MONEY WORLDWIDE SUPPORT DISTINCTIVE FEATURES SAFETY BY DESIGN MORE ROOM VERSATILITY
 AW119Kx The largest and most powerful light single engine helicopter for a wide range of missions providing operators with the highest levels of flexibility and productivity. DISTINCTIVE FEATURES VERSATILITY
AW119Kx The largest and most powerful light single engine helicopter for a wide range of missions providing operators with the highest levels of flexibility and productivity. DISTINCTIVE FEATURES VERSATILITY
AGUSTA Meeting tomorrow s needs today
 AGUSTA Meeting tomorrow s needs today community with its unrivalled preeminence in design, technological innovation, manufacturing, and customer service capabilities. Proud of our heritage of yesterday,
AGUSTA Meeting tomorrow s needs today community with its unrivalled preeminence in design, technological innovation, manufacturing, and customer service capabilities. Proud of our heritage of yesterday,
AGUSTA. Meeting tomorrow s needs today. preeminence in design, technological innovation, manufacturing, and customer service capabilities.
 AGUSTA Meeting tomorrow s needs today Agusta is unique in this community with its unrivalled Since its establishment as a pioneering airplane manufacturer in 1907 to its entry as a major helicopter manufacturer
AGUSTA Meeting tomorrow s needs today Agusta is unique in this community with its unrivalled Since its establishment as a pioneering airplane manufacturer in 1907 to its entry as a major helicopter manufacturer
The AW139 is the market-leading intermediate twin-engine helicopter.
 Offshore AW139 Photo by Ned Dawson SIMPLY NO RIVALS PERFORMING WORLDWIDE The AW139 is the market-leading intermediate twin-engine helicopter. Ideally suited to demanding Offshore missions, with superior
Offshore AW139 Photo by Ned Dawson SIMPLY NO RIVALS PERFORMING WORLDWIDE The AW139 is the market-leading intermediate twin-engine helicopter. Ideally suited to demanding Offshore missions, with superior
Normal T/O Procedure. * * * Engine Failure on T/O * * *
 Normal T/O Procedure After adding full power: Engine Instruments green Airspeed alive 1,000 AGL Accelerate to enroute climb 113 KIAS Set climb power Vr 78, but it will come off the ground before Stay in
Normal T/O Procedure After adding full power: Engine Instruments green Airspeed alive 1,000 AGL Accelerate to enroute climb 113 KIAS Set climb power Vr 78, but it will come off the ground before Stay in
AIRCRAFT AND TECHNOLOGY CONCEPTS FOR AN N+3 SUBSONIC TRANSPORT. Elena de la Rosa Blanco May 27, 2010
 AIRCRAFT AND TECHNOLOGY CONCEPTS FOR AN N+3 SUBSONIC TRANSPORT MIT, Aurora Flights Science, and Pratt & Whitney Elena de la Rosa Blanco May 27, 2010 1 The information in this document should not be disclosed
AIRCRAFT AND TECHNOLOGY CONCEPTS FOR AN N+3 SUBSONIC TRANSPORT MIT, Aurora Flights Science, and Pratt & Whitney Elena de la Rosa Blanco May 27, 2010 1 The information in this document should not be disclosed
Content. Introduction. Technology. Type of unmanned vehicle. Past, Present, Future. Conclusion
 Introduction Content Technology Type of unmanned vehicle Past, Present, Future Conclusion What is unmanned vehicles? l Without a person on board l Remote controlled l Remote guided vehicles Reduce casualty
Introduction Content Technology Type of unmanned vehicle Past, Present, Future Conclusion What is unmanned vehicles? l Without a person on board l Remote controlled l Remote guided vehicles Reduce casualty
POWER. SAFETY. PERFORMANCE. ALL IN ONE PACKAGE.
 POWER. SAFETY. PERFORMANCE. ALL IN ONE PACKAGE. Some missions require more from a helicopter. More speed. More power. More payload. More productivity. These missions require the MD 600N. This single-turbine
POWER. SAFETY. PERFORMANCE. ALL IN ONE PACKAGE. Some missions require more from a helicopter. More speed. More power. More payload. More productivity. These missions require the MD 600N. This single-turbine
AW139 Emergency Medical Services
 AW139 Emergency Medical Services SIMPLY NO RIVALS THE BENCHMARK FOR EMERGENCY RESPONSE Designed specifically to meet the multi-mission demands of a new world, the AW139, a member of the AgustaWestland
AW139 Emergency Medical Services SIMPLY NO RIVALS THE BENCHMARK FOR EMERGENCY RESPONSE Designed specifically to meet the multi-mission demands of a new world, the AW139, a member of the AgustaWestland
Request for Proposal Electric Vertical Takeoff and Landing (E-VTOL) Aircraft
 Aircraft") Request for Proposal Electric Vertical Takeoff and Landing (E-VTOL) Aircraft Opportunity Description The recent and continuing development in technological state-of-the-art for electric motors, power electronics,
Request for Proposal Electric Vertical Takeoff and Landing (E-VTOL) Aircraft Opportunity Description The recent and continuing development in technological state-of-the-art for electric motors, power electronics,
Presentation Outline. # Title # Title
 CDR Presentation 1 Presentation Outline # Title # Title 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 Team Introduction Vehicle Overview Vehicle Dimensions Upper Body Section Payload
CDR Presentation 1 Presentation Outline # Title # Title 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 Team Introduction Vehicle Overview Vehicle Dimensions Upper Body Section Payload
Star Tower. Why Aerostats Star Tower: Applications Summary. Description Performance Features Payload. Product CARAVAN INTERNATIONAL CORPORATION
 AEROSTATS CARAVAN INTERNATIONAL CORPORATION Star Tower Why Aerostats Star Tower: Product Description Performance Features Payload Applications Summary Why Our Aerostats Provide persistent wide-area coverage
AEROSTATS CARAVAN INTERNATIONAL CORPORATION Star Tower Why Aerostats Star Tower: Product Description Performance Features Payload Applications Summary Why Our Aerostats Provide persistent wide-area coverage
Skycar Flight Control System Overview By Bruce Calkins August 14, 2012
 Skycar Flight Control System Overview By Bruce Calkins August 14, 2012 Introduction The Skycar is a new type of personal aircraft that will rely on directed thrust produced by its engines to enable various
Skycar Flight Control System Overview By Bruce Calkins August 14, 2012 Introduction The Skycar is a new type of personal aircraft that will rely on directed thrust produced by its engines to enable various
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Propulsion Systems for Robotics Dr. Kostas Alexis (CSE) Propulsion Systems for Robotics How do I move? Understanding propulsion systems is about knowing how a mobile
Autonomous Mobile Robot Design Topic: Propulsion Systems for Robotics Dr. Kostas Alexis (CSE) Propulsion Systems for Robotics How do I move? Understanding propulsion systems is about knowing how a mobile
Statement of Work Requirements Verification Table - Addendum
 Statement of Work Requirements Verification Table - Addendum Vehicle Requirements Requirement Success Criteria Verification 1.1 No specific design requirement exists for the altitude. The altitude is a
Statement of Work Requirements Verification Table - Addendum Vehicle Requirements Requirement Success Criteria Verification 1.1 No specific design requirement exists for the altitude. The altitude is a
T R E K K E R RUGGED AND RELIABLE 2
 AW109 Trekker T R E K K E R RUGGED AND RELIABLE 2 DISCOVER THE AW109 TREKKER The AW109 Trekker is a new multi-role light twin engine helicopter developed to provide the perfect solution for the most demanding
AW109 Trekker T R E K K E R RUGGED AND RELIABLE 2 DISCOVER THE AW109 TREKKER The AW109 Trekker is a new multi-role light twin engine helicopter developed to provide the perfect solution for the most demanding
SURVEYOR-H. Technical Data. Max speed 120 km/h. Engine power 7.2 hp. Powerplant Modified Zenoah G29E. Fuel tank volume 3.6 l
 rev. 28.10.14 * features & specifications are subject to change without notice. Technical Data Max speed 120 km/h Engine power 7.2 hp Powerplant Modified Zenoah G29E Fuel tank volume 3.6 l Payload with
rev. 28.10.14 * features & specifications are subject to change without notice. Technical Data Max speed 120 km/h Engine power 7.2 hp Powerplant Modified Zenoah G29E Fuel tank volume 3.6 l Payload with
Small UAV A French MoD perspective and planning
 Small UAV A French MoD perspective and planning French ISTAR segmentation portable transportable infrastructure System volume Tactical Small UAV Contact Combat Helicopters (MTI) Fighter Aircrafts Land
Small UAV A French MoD perspective and planning French ISTAR segmentation portable transportable infrastructure System volume Tactical Small UAV Contact Combat Helicopters (MTI) Fighter Aircrafts Land
Palos Verdes High School 1
 Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
Electric Penguin s philosophy:
 UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v 1.1 Penguin BE Electric Unmanned Platform Up to 110 minutes of endurance 2 with 2.8 kg payload 23 liters of payload volume Quick replaceable battery cartridge
UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v 1.1 Penguin BE Electric Unmanned Platform Up to 110 minutes of endurance 2 with 2.8 kg payload 23 liters of payload volume Quick replaceable battery cartridge
Design and Development of the UTSA Unmanned Aerial System ACE 1
 Design and Development of the UTSA Unmanned Aerial System ACE 1 For use in the 2010 AUVSI Student UAS Competition Ilhan Yilmaz Department of Mechanical Engineering (Team Lead) Christopher Weldon Department
Design and Development of the UTSA Unmanned Aerial System ACE 1 For use in the 2010 AUVSI Student UAS Competition Ilhan Yilmaz Department of Mechanical Engineering (Team Lead) Christopher Weldon Department
Illinois Space Society Flight Readiness Review. University of Illinois Urbana-Champaign NASA Student Launch March 30, 2016
 Illinois Space Society Flight Readiness Review University of Illinois Urbana-Champaign NASA Student Launch 2015-2016 March 30, 2016 Team Managers Project Manager: Ian Charter Structures and Recovery Manager:
Illinois Space Society Flight Readiness Review University of Illinois Urbana-Champaign NASA Student Launch 2015-2016 March 30, 2016 Team Managers Project Manager: Ian Charter Structures and Recovery Manager:
A Risk-Based Approach for Small Unmanned Aircraft System (suas) Airworthiness and Safety Certification Risk Model Review National Academies of Science
 Airworthiness and Safety Certification Risk Model Review National Academies of Science") A Risk-Based Approach for Small Unmanned Aircraft System (suas) Airworthiness and Safety Certification Risk Model Review National Academies of Science Jeff Breunig Project Lead September 26th, 2017 MITRE
A Risk-Based Approach for Small Unmanned Aircraft System (suas) Airworthiness and Safety Certification Risk Model Review National Academies of Science Jeff Breunig Project Lead September 26th, 2017 MITRE
PRESS RELEASE Q & A. The company decided from the onset to operate under a Boeing licensing umbrella to design and produce parts to Boeing standards.
 Super98 PRESS RELEASE Q & A How was Super98 started and why? Super98 was started in 2007 by private entrepreneurs and investors with the vision to extend the economic life of the popular MDC heritage TwinJets.
Super98 PRESS RELEASE Q & A How was Super98 started and why? Super98 was started in 2007 by private entrepreneurs and investors with the vision to extend the economic life of the popular MDC heritage TwinJets.
The winner team will have the opportunity to perform a wind tunnel test campaign in the transonic/supersonic Wind tunnel at the VKI.
 Aircraft Design Competition Request for proposal (RFP) - High speed UAV Objectives: This RFP asks for an original UAV design capable of reaching, in less than 15 minutes, a given target located at 150
Aircraft Design Competition Request for proposal (RFP) - High speed UAV Objectives: This RFP asks for an original UAV design capable of reaching, in less than 15 minutes, a given target located at 150
Florida A & M University. Flight Readiness Review. 11/19/2010 Preliminary Design Review
 Florida A & M University Flight Readiness Review 11/19/2010 Preliminary Design Review 1 Overview Team Summary ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ ~~~~~~~~ Vehicle Criteria ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ ~~~~~~~~
Florida A & M University Flight Readiness Review 11/19/2010 Preliminary Design Review 1 Overview Team Summary ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ ~~~~~~~~ Vehicle Criteria ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ ~~~~~~~~
Recent Developments of Experimental Winged Rocket: Autonomous Guidance and Control Demonstration Using Parafoil
 Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 00 (2014) 000 000 www.elsevier.com/locate/procedia APISAT2014, 2014 Asia-Pacific International Symposium on Aerospace Technology,
Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 00 (2014) 000 000 www.elsevier.com/locate/procedia APISAT2014, 2014 Asia-Pacific International Symposium on Aerospace Technology,
Normal Takeoff Procedure. Aborted Takeoff Procedure Engine Failure on Takeoff
 Normal Takeoff Procedure Throttles 2000 RPM Engine Instruments Green Smoothly apply full throttles Airspeed alive V R 90 MPH Remain in ground effect until V MCA 1000 AGL or safe altitude Accelerate to
Normal Takeoff Procedure Throttles 2000 RPM Engine Instruments Green Smoothly apply full throttles Airspeed alive V R 90 MPH Remain in ground effect until V MCA 1000 AGL or safe altitude Accelerate to
Propeller blade shapes
 31 1 Propeller blade shapes and Propeller Tutorials 2 Typical Propeller Blade Shape 3 M Flight M. No. Transonic Propeller Airfoil 4 Modern 8-bladed propeller with transonic airfoils near the tip and swept
31 1 Propeller blade shapes and Propeller Tutorials 2 Typical Propeller Blade Shape 3 M Flight M. No. Transonic Propeller Airfoil 4 Modern 8-bladed propeller with transonic airfoils near the tip and swept