Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints
|
|
|
- Giles Sherman
- 6 years ago
- Views:
Transcription


1 Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints Lan Yue Ji, Sebatian Bartsch, Frank Kirchner DFKI Bremen & Universität Bremen Robotics Innovations Center Director: Prof. Dr. Frank Kirchner
2 Overview General information of the SpaceClimber project Types of Mobility for Crater Exploration Technical Aspect of SpaceClimber Robot the Controller Design Actuator Estimation of the contact torque Control schematic Exemplar experimental result Conclusion and Outlook 2

 and the European Space Agency ESA (Contract no.")
3 Project SpaceClimber Goal: Development of a six-legged, biologically-inspired, energy efficient, and adaptable free climbing robot for extraterrestrial exploration The system has to be able to move freely and securely in crater environment cope with inclinations up to 80% navigate semi-autonomous carry a scientific payload Future space qualification has to be taken into account Funding: The project SpaceClimber is funded by the German Space Agency (DLR, Grant number: 50RA0705) and the European Space Agency ESA (Contract no.: 18116/04/NL/PA) 3



 [1] Icebreaker (CMU) [2]")
4 Mobility for crater exploration Multitude of concepts for robots that could provide mobility in crater environments (e.g. wheels, tracks, legged-wheels and robot teams) Walking systems offer the highest mobility Trajectories with partial ground contact (no bulldozing, negotiate obstacles) Variable selectable foothold position High traction in steep terrain High flexibility Various walking pattern and postures Omni directional walking Multi-functionality Scarab Rover (CMU) [1] Icebreaker (CMU) [2] TRESSA (JPL) [3] CESAR (Uni Bremen / DFKI) [4] 4







5 Evolution of DFKI Legged Robots 5
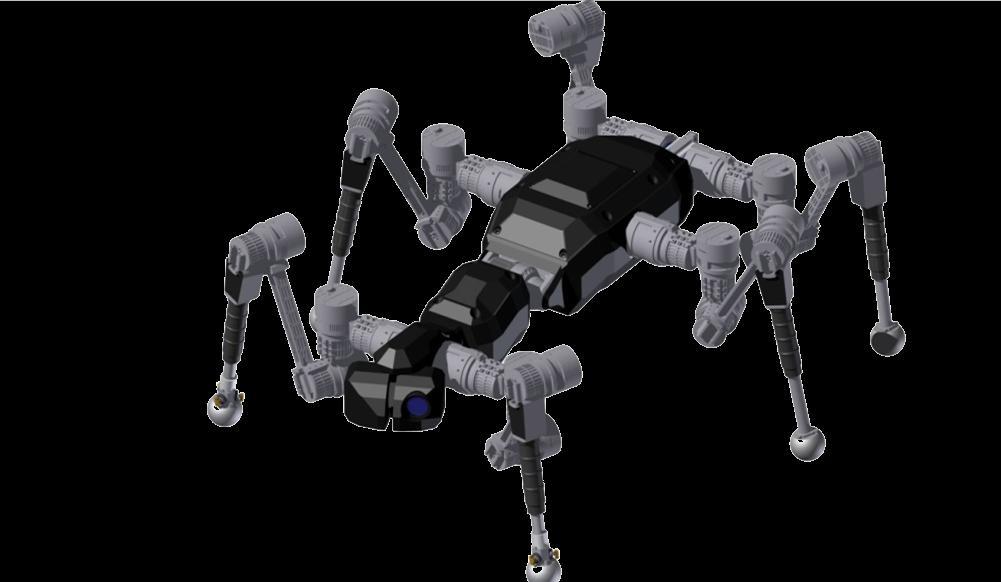
![SpaceClimber Prototype Technical Data Size [LxWxH]: 820mm x 900mm x 220mm Weight: 23Kg Actuators (# = 25 x Body, 1 x Head) : Legs: 24x RoboDrive, Harmonic Drive 1:100 (6x](/docs-images/77/76100244/images/6-1.jpg "Spring in lower legs) Body: 1 RoboDrive, Harmonic Drive 1:160 Head: 1x Dynamixel DX117 Sensors (# = 193) : Actuator: Position, speed, current, temperature, noise level Foot:")
 on Spartan3A 1200 Communication: Wireless LAN (telemetry, commands), DECT (emergency switch) Power Supply : 44,4V @")
6 SpaceClimber Prototype Technical Data Size [LxWxH]: 820mm x 900mm x 220mm Weight: 23Kg Actuators (# = 25 x Body, 1 x Head) : Legs: 24x RoboDrive, Harmonic Drive 1:100 (6x Spring in lower legs) Body: 1 RoboDrive, Harmonic Drive 1:160 Head: 1x Dynamixel DX117 Sensors (# = 193) : Actuator: Position, speed, current, temperature, noise level Foot: 4x pressure, (4x DMS), 3 axes acceleration, temperature, piston immersion Leg mounting: 6 axes force-torque-sensor Body: IMU, overall power consumption Head: Laser range finder, CMOS camera Controller: Microblaze (51,96Mhz) on Spartan3A 1200 Communication: Wireless LAN (telemetry, commands), DECT (emergency switch) Power Supply : 4000mAh 6
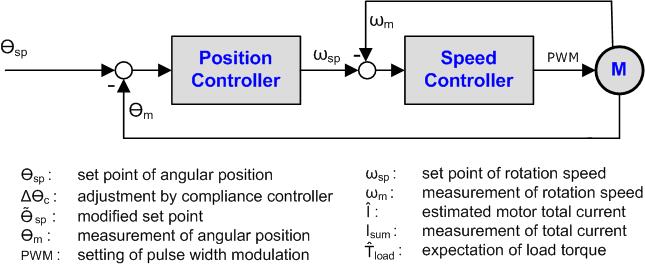
7 Control Hierarchy of SpaceClimber 7
8 Control Frequencies 8
: 64mm x 110mm Weight: 525g")

9 Actuator Design Selected components BLDC-motor: RoboDrive ILM 50x8 Gear: 100:1 HarmonicDrive Rotor position: Digital Hall sensors Absolute angular sensor: 12bit Hall effect based Specification Dimensions (ᴓ x L): 64mm x 110mm Weight: 525g Repeatable torque: 28Nm Maximum rotational speed: 0,58Hz Hollow shaft with 8mm diameter for cabling Different support points on drive side Multi-turn of each joint: ±360 = 720 Integrated electronics including Power electronics FPGA -based control LVDS communication 9
10 Compliance Control in General In Cartesian Space: In Joint Space:? Springer Handbook of Robotics 10

11 Torque Estimation 11

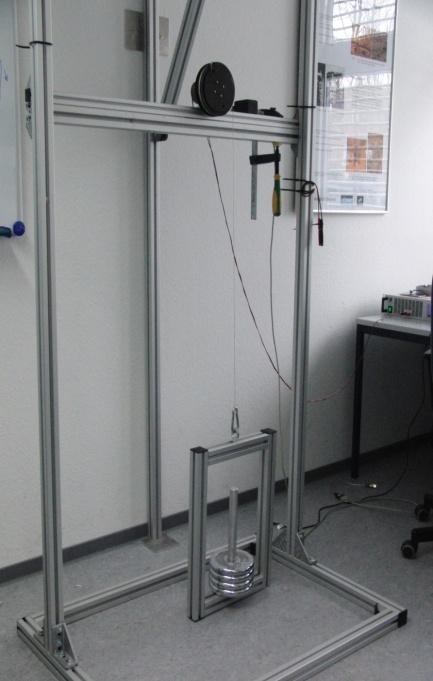

12 Identification of Torque Constant Setup2: Motor Test Bench Setup1: Winch Test 12
13 Estimation of Contact Moment by Current 13
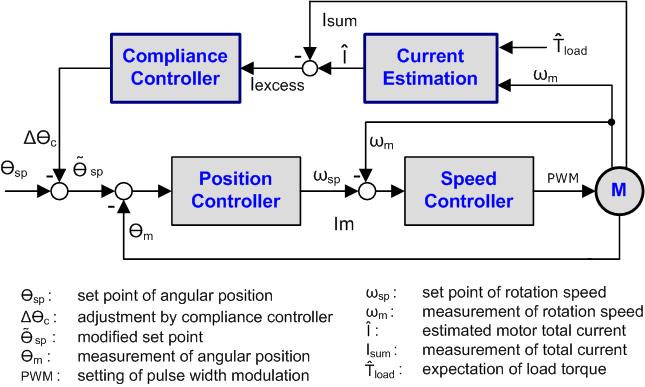
14 Compliance Controller in Joint Space 14
15 Compliance Control using Indirect Method In Cartesian Space: In Joint Space: 15

16 Experiment Video 16

17 Current Estimation for Thorax 17
18 Experiment Result for Thorax 18

19 Experiments on Distal, Basal and Thorax 19
20 Conclusion Immediate Reactive Reflex based on Self-Awareness! With distributed compliance controllers in joint space, the legged robotic system can react faster to unexpected obstacle; can improve locomotion on uneven surfaces; reduce complexity and integration effort using estimation Thus they contribute to the improvements in overall performance: stability, energy-efficiency, better protection of the robotic system level of autonomy and robustness 20
21 Outlook and Future Work Optimization of compliance settings in various scenarios Design of a general control architecture merging reflexes, locomotion control and decision-makings Improvement in the estimation accuracy 21



22 Thank You! 22
Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems
 www.dlr.de\rm Chart 1 > ASTRA 2013 - Pan/Tilt-Unit as a Perception Module 16.05.2013 Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems DLR-RMC Robotic and Mechatronic
www.dlr.de\rm Chart 1 > ASTRA 2013 - Pan/Tilt-Unit as a Perception Module 16.05.2013 Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems DLR-RMC Robotic and Mechatronic
RIMRES: A project summary
 RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
Mobile Payload Element (MPE)
") Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
Control of Mobile Robots
 Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
MASCOT Asteroid Lander with innovative Mobility Mechanism
 www.dlr.de Slide 1 MASCOT Asteroid Lander with innovative Mobility Mechanism Dr. Josef Reill German Aerospace Center - DLR Institute of Robotics and Mechatronics Team-Members: Josef Reill Hans-Jürgen Sedlmayr
www.dlr.de Slide 1 MASCOT Asteroid Lander with innovative Mobility Mechanism Dr. Josef Reill German Aerospace Center - DLR Institute of Robotics and Mechatronics Team-Members: Josef Reill Hans-Jürgen Sedlmayr
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
CONCEPT STUDY FOR THE FASTER MICRO SCOUT ROVER
 CONCEPT STUDY FOR THE FASTER MICRO SCOUT ROVER Roland U. Sonsalla, Martin Fritsche, Thomas Voegele, and Frank Kirchner DFKI Robotics Innovation Center, 28359 Bremen, Germany ABSTRACT In contrast to the
CONCEPT STUDY FOR THE FASTER MICRO SCOUT ROVER Roland U. Sonsalla, Martin Fritsche, Thomas Voegele, and Frank Kirchner DFKI Robotics Innovation Center, 28359 Bremen, Germany ABSTRACT In contrast to the
Chassis Concepts for the ExoMars Rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN
 Ready 12th Symposium on Advance Space Technologies in Robotics and Automation, ESA / ESTEC, Noordwijk, The Nethelands DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN Shivesh Kumar, Raghavendra
Ready 12th Symposium on Advance Space Technologies in Robotics and Automation, ESA / ESTEC, Noordwijk, The Nethelands DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN Shivesh Kumar, Raghavendra
An Overview of CSA s s Space Robotics Activities
 An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
Autonomous Mobile Robots and Intelligent Control Issues. Sven Seeland
 Autonomous Mobile Robots and Intelligent Control Issues Sven Seeland Overview Introduction Motivation History of Autonomous Cars DARPA Grand Challenge History and Rules Controlling Autonomous Cars MIT
Autonomous Mobile Robots and Intelligent Control Issues Sven Seeland Overview Introduction Motivation History of Autonomous Cars DARPA Grand Challenge History and Rules Controlling Autonomous Cars MIT
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science
 Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative Autonomous Driving and Interaction with Vulnerable Road Users
 9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
Space Robotics Planetary Exploration - a DLR Perspective
 Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Helicopter Noise and Vibration (EU Project "HELINOVI")
") Helicopter Noise and Vibration (EU Project "HELINOVI") Hans-Jürgen Langer, DLR Aeronautics Days 19th/21st June 2006, Vienna Overview Motivation Acoustic Problem Vibration Problem Partners Tools - Configurations
Helicopter Noise and Vibration (EU Project "HELINOVI") Hans-Jürgen Langer, DLR Aeronautics Days 19th/21st June 2006, Vienna Overview Motivation Acoustic Problem Vibration Problem Partners Tools - Configurations
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Wheeled Mobile Robots
 Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
NEXT Exploration Science and Technology Mission. Relevance for Lunar Exploration
 NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
European Lunar Lander: System Engineering Approach
 human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
Innovative Mars exploration rover using inflatable or unfolding wheels
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
The experimental Robot Project
 The experimental Robot Project Felix darthrake Schneider Norbert Braun {felix,norbert}@xrpbot.org 31c3 2014-12-27 1 2 3 BLDC motors Sensors Gears and Actuators Motor Testbed Other Projects : Goals The
The experimental Robot Project Felix darthrake Schneider Norbert Braun {felix,norbert}@xrpbot.org 31c3 2014-12-27 1 2 3 BLDC motors Sensors Gears and Actuators Motor Testbed Other Projects : Goals The
Adult Sized Humanoid Robot: Archie
 Adult Sized Humanoid Robot: Archie Jacky Baltes 1, Chi Tai Cheng 1, M.C. Lau 1, Ahmad Byagowi 2, Peter Kopacek 2, and John Anderson 1 1 Autonomous Agent Lab University of Manitoba Winnipeg, Manitoba Canada,
Adult Sized Humanoid Robot: Archie Jacky Baltes 1, Chi Tai Cheng 1, M.C. Lau 1, Ahmad Byagowi 2, Peter Kopacek 2, and John Anderson 1 1 Autonomous Agent Lab University of Manitoba Winnipeg, Manitoba Canada,
Innovating the future of disaster relief
 Innovating the future of disaster relief American Helicopter Society International 33rd Annual Student Design Competition Graduate Student Team Submission VEHICLE OVERVIEW FOUR VIEW DRAWING INTERNAL COMPONENTS
Innovating the future of disaster relief American Helicopter Society International 33rd Annual Student Design Competition Graduate Student Team Submission VEHICLE OVERVIEW FOUR VIEW DRAWING INTERNAL COMPONENTS
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help?
 Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
German Aerospace Center Flight Operations
 German Aerospace Center Flight Operations Introduction DLR is Germany s aerospace research center and space agency with about 4700 employees in 31 research institutes distributed over 8 main research centers
German Aerospace Center Flight Operations Introduction DLR is Germany s aerospace research center and space agency with about 4700 employees in 31 research institutes distributed over 8 main research centers
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, GMT
 Friday, October 30, GMT") Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
EVALUATING VOLTAGE REGULATION COMPLIANCE OF MIL-PRF-GCS600A(ARMY) FOR VEHICLE ON-BOARD GENERATORS AND ASSESSING OVERALL VEHICLE BUS COMPLIANCE
 FOR VEHICLE ON-BOARD GENERATORS AND ASSESSING OVERALL VEHICLE BUS COMPLIANCE") EVALUATING VOLTAGE REGULATION COMPLIANCE OF MIL-PRF-GCSA(ARMY) FOR VEHICLE ON-BOARD GENERATORS AND ASSESSING OVERALL VEHICLE BUS COMPLIANCE Wesley G. Zanardelli, Ph.D. Advanced Propulsion Team Disclaimer:
EVALUATING VOLTAGE REGULATION COMPLIANCE OF MIL-PRF-GCSA(ARMY) FOR VEHICLE ON-BOARD GENERATORS AND ASSESSING OVERALL VEHICLE BUS COMPLIANCE Wesley G. Zanardelli, Ph.D. Advanced Propulsion Team Disclaimer:
PRELIMINARY DESIGN REVIEW
 PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
Adult Sized Humanoid Robot: Archie
 Adult Sized Humanoid Robot: Archie Jacky Baltes 1, Chi Tai Cheng 1, M.C. Lau 1, Peter Kopacek 2, and John Anderson 1 1 Autonomous Agent Lab University of Manitoba Winnipeg, Manitoba Canada, R3T 2N2 j.baltes@cs.umanitoba.ca
Adult Sized Humanoid Robot: Archie Jacky Baltes 1, Chi Tai Cheng 1, M.C. Lau 1, Peter Kopacek 2, and John Anderson 1 1 Autonomous Agent Lab University of Manitoba Winnipeg, Manitoba Canada, R3T 2N2 j.baltes@cs.umanitoba.ca
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
COYOTE III: DEVELOPMENT OF A MODULAR AND HIGHLY MOBILE MICRO ROVER
 COYOTE III: DEVELOPMENT OF A MODULAR AND HIGHLY MOBILE MICRO ROVER Roland U. Sonsalla 1, Joel Bessekon Akpo 1, and Frank Kirchner 1,2 1 DFKI Robotics Innovation Center, Robert-Hooke-Str. 1, 28359 Bremen,
COYOTE III: DEVELOPMENT OF A MODULAR AND HIGHLY MOBILE MICRO ROVER Roland U. Sonsalla 1, Joel Bessekon Akpo 1, and Frank Kirchner 1,2 1 DFKI Robotics Innovation Center, Robert-Hooke-Str. 1, 28359 Bremen,
Bild : Bernhard Mühr German Aerospace Center Flight Operations
 German Aerospace Center Flight Operations Bild : Bernhard Mühr www.wolkenatlas.de Introduction DLR is Germany s aerospace research center and space agency with about 4700 employees in 31 research institutes
German Aerospace Center Flight Operations Bild : Bernhard Mühr www.wolkenatlas.de Introduction DLR is Germany s aerospace research center and space agency with about 4700 employees in 31 research institutes
Your application, our mobility. Do you need mobility to enable your application?
 Your application, our mobility Do you need mobility to enable your application? Since 2001, BlueBotics provides engineering services and custom solutions to support your product development and enable
Your application, our mobility Do you need mobility to enable your application? Since 2001, BlueBotics provides engineering services and custom solutions to support your product development and enable
From MARS To MOON. V. Giorgio Director of Italian Programs. Sorrento, October, All rights reserved, 2007, Thales Alenia Space
 From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
RB-Mel-03. SCITOS G5 Mobile Platform Complete Package
 RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE
 WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE Ilkka Leppänen, Sami Salmi and Aarne Halme Automation Technology Laboratory Helsinki University of Technology PL 3000, 02015 HUT, Finland E-mail
WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE Ilkka Leppänen, Sami Salmi and Aarne Halme Automation Technology Laboratory Helsinki University of Technology PL 3000, 02015 HUT, Finland E-mail
Wheeled Robotic Mobility. Dimi Apostolopoulos
 Wheeled Robotic Mobility Dimi Apostolopoulos Significance of Mobility Move Position Transport Employ instruments and tools React to work loads in a controllable fashion ROBOTIC MOBILITY Dimi Apostolopoulos
Wheeled Robotic Mobility Dimi Apostolopoulos Significance of Mobility Move Position Transport Employ instruments and tools React to work loads in a controllable fashion ROBOTIC MOBILITY Dimi Apostolopoulos
Design and Navigation of Flying Robots
 Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
ASTRIUM. Lunar Lander Concept for LIFE. Hansjürgen Günther TOB 11. Bremen, 23/
 Lunar Lander Concept for LIFE Hansjürgen Günther TOB 11 Bremen, 23/24.11.2006 This document is the property of EADS SPACE. It shall not be communicated to third parties without prior written agreement.its
Lunar Lander Concept for LIFE Hansjürgen Günther TOB 11 Bremen, 23/24.11.2006 This document is the property of EADS SPACE. It shall not be communicated to third parties without prior written agreement.its
REU: Improving Straight Line Travel in a Miniature Wheeled Robot
 THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
Vehicles at Volkswagen
 Autonomous Driving and Intelligent Vehicles at Volkswagen Dirk Langer, Ph.D. VW Autonomous Driving Story 2000 2003 2006 Robot Klaus Purpose: Replace test drivers on poor test tracks (job safety) Robot
Autonomous Driving and Intelligent Vehicles at Volkswagen Dirk Langer, Ph.D. VW Autonomous Driving Story 2000 2003 2006 Robot Klaus Purpose: Replace test drivers on poor test tracks (job safety) Robot
Technical Paper. Technology to meet the highest standards. Reliable safety brakes for future-orientated RoboDrive motors FA.6.78.
 Technical Paper FA.6.78.EN Technology to meet the highest standards Reliable safety brakes for future-orientated RoboDrive motors Drives in the robotics sector require a maximum of dynamics and precision,
Technical Paper FA.6.78.EN Technology to meet the highest standards Reliable safety brakes for future-orientated RoboDrive motors Drives in the robotics sector require a maximum of dynamics and precision,
Results of the Airbus DS led e.deorbit Phase B1 ESA study. Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, October 2017
 Results of the Airbus DS led e.deorbit Phase B1 ESA study Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, 24-26 October 2017 2 e.deorbit Mission Final rendezvous and capture phase Phase B1 Team
Results of the Airbus DS led e.deorbit Phase B1 ESA study Dr.-Ing. Stéphane Estable ESA Clean Space Industrial Days, 24-26 October 2017 2 e.deorbit Mission Final rendezvous and capture phase Phase B1 Team
Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers
 Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers Kojiro Iizuka and Takashi Kubota 2 International Young Researchers Empowerment Center, Shinshu University, iizuka@shinshu-u.ac.jp 2
Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers Kojiro Iizuka and Takashi Kubota 2 International Young Researchers Empowerment Center, Shinshu University, iizuka@shinshu-u.ac.jp 2
Modeling and Simulation of a Mobile Robot for Polar Environments
 Modeling and Simulation of a Mobile Robot for Polar Environments Thesis Presented by Eric Akers October 20, 2003 Committee Chair Professor Agah Committee Member Professor Minden Committee Member Professor
Modeling and Simulation of a Mobile Robot for Polar Environments Thesis Presented by Eric Akers October 20, 2003 Committee Chair Professor Agah Committee Member Professor Minden Committee Member Professor
Lunar Robotics. Dr. Rob Ambrose, NASA JSC December Dr. Robert O. Ambrose
 Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
Selected Problems of Electric Vehicle Dynamics
 Selected Problems of Electric Vehicle Dynamics J. Kovanda* Department of Security Technologies and Engineering, Czech Technical University in Prague, Faculty of Transportation Sciences, Prague, Czech Republic
Selected Problems of Electric Vehicle Dynamics J. Kovanda* Department of Security Technologies and Engineering, Czech Technical University in Prague, Faculty of Transportation Sciences, Prague, Czech Republic
Enhancing Wheelchair Mobility Through Dynamics Mimicking
 Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
Boombot: Low Friction Coefficient Stair Climbing Robot Using Rotating Boom and Weight Redistribution
 Boombot: Low Friction Coefficient Stair Climbing Robot Using Rotating Boom and Weight Redistribution Sartaj Singh and Ramachandra K Abstract Boombot comprising four wheels and a rotating boom in the middle
Boombot: Low Friction Coefficient Stair Climbing Robot Using Rotating Boom and Weight Redistribution Sartaj Singh and Ramachandra K Abstract Boombot comprising four wheels and a rotating boom in the middle
Aerial robots that interact with the environment
 Aerial robots that interact with the environment Guillermo Heredia*, Aníbal Ollero * Professor at University of Seville, Spain Robotics, Vision and Control group (GRVC) guiller@us.es Robotics, Vision and
Aerial robots that interact with the environment Guillermo Heredia*, Aníbal Ollero * Professor at University of Seville, Spain Robotics, Vision and Control group (GRVC) guiller@us.es Robotics, Vision and
Design of Wheeled Mobile Robot with Tri-Star Wheel as Rescue Robot
 Design of Wheeled Mobile Robot with Tri-Star Wheel as Rescue Robot Rafiuddin Syam, Wahyu H. Piarah Mechanical Engineering Department Engineering Faculty, Hasanuddin University Jl. P. Kemerdekaan Km 10
Design of Wheeled Mobile Robot with Tri-Star Wheel as Rescue Robot Rafiuddin Syam, Wahyu H. Piarah Mechanical Engineering Department Engineering Faculty, Hasanuddin University Jl. P. Kemerdekaan Km 10
Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics: Results and Roadmaps
 National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
Table of Contents. Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.
 Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.") March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
High-accuracy Dead-reckoning System (HADRS) for Manned and Unmanned Ground Vehicles
 for Manned and Unmanned Ground Vehicles") Mobile Robotics Lab High-accuracy Dead-reckoning System (HADRS) for Manned and Unmanned Ground Vehicles PI: Johann Borenstein* Research Professor at the University of Michigan * 28 years experience in
Mobile Robotics Lab High-accuracy Dead-reckoning System (HADRS) for Manned and Unmanned Ground Vehicles PI: Johann Borenstein* Research Professor at the University of Michigan * 28 years experience in
Autonomyof vehicles. Prof. dr. Jernej Klemenc, dr. Simon Oman
 Autonomyof vehicles Prof. dr. Jernej Klemenc, dr. Simon Oman 12. Julij 2018 Content Sensors and ICT (information communication technology) Data processing -identification of traffic signalization and various
Autonomyof vehicles Prof. dr. Jernej Klemenc, dr. Simon Oman 12. Julij 2018 Content Sensors and ICT (information communication technology) Data processing -identification of traffic signalization and various
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY
 UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
elektronik Designing vehicle power nets A single simulation tool from initial requirements to series production
 www.atzonline.de elektronik 04 April 2013 Volume 8 Offprint from ATZelektronik 4/2013 Springer Automotive Media Springer Fachmedien Wiesbaden GmbH for Bosch Engineering Designing vehicle power nets A single
www.atzonline.de elektronik 04 April 2013 Volume 8 Offprint from ATZelektronik 4/2013 Springer Automotive Media Springer Fachmedien Wiesbaden GmbH for Bosch Engineering Designing vehicle power nets A single
On the role of AI in autonomous driving: prospects and challenges
 On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
Electric Wheel-Hub-Drive for Aircraft Application. Institute of Vehicle Concepts Dr. Michael Schier
 Electric Wheel-Hub-Drive for Aircraft Application Institute of Vehicle Concepts Dr. Michael Schier Introduction DLR German Aerospace Center Research center Aeronautics Space Energy Transport Space agency
Electric Wheel-Hub-Drive for Aircraft Application Institute of Vehicle Concepts Dr. Michael Schier Introduction DLR German Aerospace Center Research center Aeronautics Space Energy Transport Space agency
A First Principles-based Li-Ion Battery Performance and Life Prediction Model Based on Reformulated Model Equations NASA Battery Workshop
 A First Principles-based Li-Ion Battery Performance and Life Prediction Model Based on Reformulated Model Equations NASA Battery Workshop Huntsville, Alabama November 17-19, 19, 2009 by Gerald Halpert
A First Principles-based Li-Ion Battery Performance and Life Prediction Model Based on Reformulated Model Equations NASA Battery Workshop Huntsville, Alabama November 17-19, 19, 2009 by Gerald Halpert
ELECTRICAL 48 V MAIN COOLANT PUMP TO REDUCE CO 2 EMISSIONS
 ELECTRICAL 48 V MAIN COOLANT PUMP TO REDUCE CO 2 EMISSIONS Mahle has developed an electrical main coolant pump for the 48 V on-board net. It replaces the mechanical pump and offers further reductions in
ELECTRICAL 48 V MAIN COOLANT PUMP TO REDUCE CO 2 EMISSIONS Mahle has developed an electrical main coolant pump for the 48 V on-board net. It replaces the mechanical pump and offers further reductions in
INTERCONNECTION POSSIBILITIES FOR THE WORKING VOLUMES OF THE ALTERNATING HYDRAULIC MOTORS
 Scientific Bulletin of the Politehnica University of Timisoara Transactions on Mechanics Special issue The 6 th International Conference on Hydraulic Machinery and Hydrodynamics Timisoara, Romania, October
Scientific Bulletin of the Politehnica University of Timisoara Transactions on Mechanics Special issue The 6 th International Conference on Hydraulic Machinery and Hydrodynamics Timisoara, Romania, October
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
F.I.R.S.T. Robotic Drive Base
 F.I.R.S.T. Robotic Drive Base Design Team Shane Lentini, Jose Orozco, Henry Sick, Rich Phelan Design Advisor Prof. Sinan Muftu Abstract F.I.R.S.T. is an organization dedicated to inspiring and teaching
F.I.R.S.T. Robotic Drive Base Design Team Shane Lentini, Jose Orozco, Henry Sick, Rich Phelan Design Advisor Prof. Sinan Muftu Abstract F.I.R.S.T. is an organization dedicated to inspiring and teaching
Press Release. New Silicon Solar Cell Concepts for Improved Efficiency
 Page 1 New Silicon Solar Cell Concepts for Improved Efficiency Researchers at Fraunhofer ISE Achieve Efficiencies over 20 % Using Screen Printing Technology In order to reduce the cost of solar electricity,
Page 1 New Silicon Solar Cell Concepts for Improved Efficiency Researchers at Fraunhofer ISE Achieve Efficiencies over 20 % Using Screen Printing Technology In order to reduce the cost of solar electricity,
Prototyping Collision Avoidance for suas
 Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
ParcelBot A Tracked Parcel Transporter with High Obstacle Negotiation Capabilities
 Research Collection Conference Paper ParcelBot A Tracked Parcel Transporter with High Obstacle Negotiation Capabilities Author(s): Hoepflinger, Mark H.; Baschung, David; Remy, C. D.; Hutter, Marco; Siegwart,
Research Collection Conference Paper ParcelBot A Tracked Parcel Transporter with High Obstacle Negotiation Capabilities Author(s): Hoepflinger, Mark H.; Baschung, David; Remy, C. D.; Hutter, Marco; Siegwart,
Adrestia. A mission for humanity, designed in Delft. Challenge the future
 Adrestia A mission for humanity, designed in Delft 1 Adrestia Vision Statement: To inspire humanity by taking the next step towards setting a footprint on Mars Mission Statement Our goal is to design an
Adrestia A mission for humanity, designed in Delft 1 Adrestia Vision Statement: To inspire humanity by taking the next step towards setting a footprint on Mars Mission Statement Our goal is to design an
DLR s Free Piston Linear Generator FPLG Development of an Innovative Linear Power Unit
 DLR s Free Piston Linear Generator FPLG of an Innovative Linear Power Unit Florian Kock September 8, 2015 www.dlr.de Slide 1 > Kock > FKLG > 2015-09-08 FPLG Project Overview A Decade of Linear Power 2002
DLR s Free Piston Linear Generator FPLG of an Innovative Linear Power Unit Florian Kock September 8, 2015 www.dlr.de Slide 1 > Kock > FKLG > 2015-09-08 FPLG Project Overview A Decade of Linear Power 2002
Tank-Automotive Research, Development, and Engineering Center
 Tank-Automotive Research, Development, and Engineering Center Technologies for the Objective Force Mr. Dennis Wend Executive Director for the National Automotive Center Tank-automotive & Armaments COMmand
Tank-Automotive Research, Development, and Engineering Center Technologies for the Objective Force Mr. Dennis Wend Executive Director for the National Automotive Center Tank-automotive & Armaments COMmand
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition
 Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Propeller Blade Bearings for Aircraft Open Rotor Engine
 NTN TECHNICAL REVIEW No.84(2016) [ New Product ] Guillaume LEFORT* The Propeller Blade Bearings for Open Rotor Engine SAGE2 were developed by NTN-SNR in the frame of the Clean Sky aerospace programme.
NTN TECHNICAL REVIEW No.84(2016) [ New Product ] Guillaume LEFORT* The Propeller Blade Bearings for Open Rotor Engine SAGE2 were developed by NTN-SNR in the frame of the Clean Sky aerospace programme.
Long-Range Rovers for Mars Exploration and Sample Return
 2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
drive is what matters
 drive is what matters www.pmdm.de PM DM driven by motion PM DM Specialized in modern motor systems, Precision Motors Deutsche Minebea GmbH (PM DM) designs and produces motor systems for computer hard drives
drive is what matters www.pmdm.de PM DM driven by motion PM DM Specialized in modern motor systems, Precision Motors Deutsche Minebea GmbH (PM DM) designs and produces motor systems for computer hard drives
New impulses for sensing in automotive Dr. Richard Dixon
 New impulses for sensing in automotive Dr. Richard Dixon Senior Principal Analyst, MEMS & Sensors Agenda Automotive MEMS & Sensor Market Overview New impulses Automated driving Electrification Trends Conclusions
New impulses for sensing in automotive Dr. Richard Dixon Senior Principal Analyst, MEMS & Sensors Agenda Automotive MEMS & Sensor Market Overview New impulses Automated driving Electrification Trends Conclusions
Electric Wheel-Hub-Drive for Aircraft Application Airbus Trial Institute of Vehicle Concepts Dr. Michael Schier
 Electric Wheel-Hub-Drive for Aircraft Application Airbus Trial Institute of Vehicle Concepts Dr. Michael Schier Introduction DLR German Aerospace Center The German Aerospace Center is busy in Aeronautics
Electric Wheel-Hub-Drive for Aircraft Application Airbus Trial Institute of Vehicle Concepts Dr. Michael Schier Introduction DLR German Aerospace Center The German Aerospace Center is busy in Aeronautics
HYSYS System Components for Hybridized Fuel Cell Vehicles
 HYSYS System Components for Hybridized Fuel Cell Vehicles J. Wind, A. Corbet, R.-P. Essling, P. Prenninger, V. Ravello This document appeared in Detlef Stolten, Thomas Grube (Eds.): 18th World Hydrogen
HYSYS System Components for Hybridized Fuel Cell Vehicles J. Wind, A. Corbet, R.-P. Essling, P. Prenninger, V. Ravello This document appeared in Detlef Stolten, Thomas Grube (Eds.): 18th World Hydrogen
Until they start building tiny fueling stations on Mars,
 Doing the Locomotion with a Microrobot Powered by a Microbial Fuel Cell Until they start building tiny fueling stations on Mars, the problem of meeting the low-power generation and distribution requirements
Doing the Locomotion with a Microrobot Powered by a Microbial Fuel Cell Until they start building tiny fueling stations on Mars, the problem of meeting the low-power generation and distribution requirements
Robots to Support a Human Mars Mission
 Robots to Support a Human Mars Mission 1 W. Naumann, P. Hofmann, A. v. Richter Kayser-Threde GmbH Wolfratshauser Str. 48, D-81379 München email: andreas.von.richter@kayser-threde.com 7th Workshop ASTRA
Robots to Support a Human Mars Mission 1 W. Naumann, P. Hofmann, A. v. Richter Kayser-Threde GmbH Wolfratshauser Str. 48, D-81379 München email: andreas.von.richter@kayser-threde.com 7th Workshop ASTRA
MilliAmpère Norges første førerløse ferje
 Sjøsikkerhetskonferansen 2018 Nå MilliAmpère Norges første førerløse ferje Egil Eide Førsteamanuensis, NTNU The Development of an Autonomous Shuttle Ferry in Trondheim Associate Professor Egil Eide, Department
Sjøsikkerhetskonferansen 2018 Nå MilliAmpère Norges første førerløse ferje Egil Eide Førsteamanuensis, NTNU The Development of an Autonomous Shuttle Ferry in Trondheim Associate Professor Egil Eide, Department
Unmanned Surface Vessels - Opportunities and Technology
 Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
A deep dive into service robotics drive solutions. By: Pablo Yelamos Ruiz, Applications Engineer, Infineon Technologies AG
 Novel Robots Rely on Sufficient Power Semiconductors A deep dive into service robotics drive solutions By: Pablo Yelamos Ruiz, Applications Engineer, Infineon Technologies AG People have been infatuated
Novel Robots Rely on Sufficient Power Semiconductors A deep dive into service robotics drive solutions By: Pablo Yelamos Ruiz, Applications Engineer, Infineon Technologies AG People have been infatuated
SOLUTIONS FOR MOLD MANUFACTURERS
 www.unisig.com SOLUTIONS FOR MOLD MANUFACTURERS DEEP HOLE DRILLING AND MACHINING CENTERS FULL RANGE OF DEEP HOLE DRILLING AND MILLING CENTERS MILLING, BTA, AND GUNDRILLING CAPABILITIES DESIGNED FOR MOLD
www.unisig.com SOLUTIONS FOR MOLD MANUFACTURERS DEEP HOLE DRILLING AND MACHINING CENTERS FULL RANGE OF DEEP HOLE DRILLING AND MILLING CENTERS MILLING, BTA, AND GUNDRILLING CAPABILITIES DESIGNED FOR MOLD
US Army TACOM-TARDEC Intelligent Mobility Program
 US Army TACOM-TARDEC Intelligent Mobility Program Dr. Jim Overholt Senior Research Scientist US Army Tank Automotive RDE Center (TARDEC) Warren, MI 48397-5000 overholj@tacom.army.mil Tank-automotive Committed
US Army TACOM-TARDEC Intelligent Mobility Program Dr. Jim Overholt Senior Research Scientist US Army Tank Automotive RDE Center (TARDEC) Warren, MI 48397-5000 overholj@tacom.army.mil Tank-automotive Committed
Experimental Validation of a Scalable Mobile Robot for Traversing Ferrous Pipelines
 Project Number: MQP TP1- IPG1 Experimental Validation of a Scalable Mobile Robot for Traversing Ferrous Pipelines A Major Qualifying Project (MQP) Submitted to the Faculty of WORCESTER POYTECHNIC INSTITUTE
Project Number: MQP TP1- IPG1 Experimental Validation of a Scalable Mobile Robot for Traversing Ferrous Pipelines A Major Qualifying Project (MQP) Submitted to the Faculty of WORCESTER POYTECHNIC INSTITUTE
Innovative AGV Technologies
 Innovative AGV Technologies Scalable AGV Systems Modular AGV Subassemblies NIDEC-SHIMPO has earned a solid reputation within the robotics sector as the leader in high volume, high precision, gearbox and
Innovative AGV Technologies Scalable AGV Systems Modular AGV Subassemblies NIDEC-SHIMPO has earned a solid reputation within the robotics sector as the leader in high volume, high precision, gearbox and
THE NEW VS SERIES. Connectivity. Protection
 THE NEW VS SERIES The new DENSO VS-Series six-axis articulated robots are even faster, more compact and more flexible than previous VS models. Their outstanding features include: z Higher speed: Cycle
THE NEW VS SERIES The new DENSO VS-Series six-axis articulated robots are even faster, more compact and more flexible than previous VS models. Their outstanding features include: z Higher speed: Cycle
Innovative Testing Equipment. Torque sensors Vehicle Applications Actuators
 Innovative Testing Equipment Torque sensors Vehicle Applications Actuators Custom-made measuring solutions As a leading drivetrain testing company, ATESTEO specialises in drivetrain and transmission testing
Innovative Testing Equipment Torque sensors Vehicle Applications Actuators Custom-made measuring solutions As a leading drivetrain testing company, ATESTEO specialises in drivetrain and transmission testing
Rotac Plus. Automationware. High rigidity, accuracy and positioning repeatability on large variety of sizes.
 48 65 85 100 130 200 High rigidity, accuracy and positioning repeatability on large variety of sizes. 48 65 85 100 130 200 High rigidity, accuracy and positioning repeatability on large variety of sizes
48 65 85 100 130 200 High rigidity, accuracy and positioning repeatability on large variety of sizes. 48 65 85 100 130 200 High rigidity, accuracy and positioning repeatability on large variety of sizes
Technical Robustness and Quality
 Technical Robustness and Quality www.teamrush27.net Rock Solid Robot Page Title 1-4 Robustness In Concept And Fabrication 5 Creative Concepts For Tomorrow s Technology 6-8 Rock Solid Controls 9-10 Effectively
Technical Robustness and Quality www.teamrush27.net Rock Solid Robot Page Title 1-4 Robustness In Concept And Fabrication 5 Creative Concepts For Tomorrow s Technology 6-8 Rock Solid Controls 9-10 Effectively
PaR Tensile Truss for Nuclear Decontamination and Decommissioning 12467
 PaR Tensile Truss for Nuclear Decontamination and Decommissioning 12467 ABSTRACT Gary R. Doebler, Project Manager, PaR Systems Inc. 707 County Road E West, Shoreview, MN 55126 Remote robotics and manipulators
PaR Tensile Truss for Nuclear Decontamination and Decommissioning 12467 ABSTRACT Gary R. Doebler, Project Manager, PaR Systems Inc. 707 County Road E West, Shoreview, MN 55126 Remote robotics and manipulators
LMF: The lightweight manipulator vehicle of Kerntechnische Hilfsdienst GmbH. System configuration and operations
 LMF: The lightweight manipulator vehicle of Kerntechnische Hilfsdienst GmbH System configuration and operations U. Süss (1), V. Abadie (2), L. Joudrier (3) Keywords: Teleoperation, Mobile Robotics, Manipulator
LMF: The lightweight manipulator vehicle of Kerntechnische Hilfsdienst GmbH System configuration and operations U. Süss (1), V. Abadie (2), L. Joudrier (3) Keywords: Teleoperation, Mobile Robotics, Manipulator
AUTOPILOT Webinar Series (II): Developing Automated Driving Pilots for IoT: Brainport
: Developing Automated Driving Pilots for IoT: Brainport") AUTOPILOT Webinar Series (II): Developing Automated Driving Pilots for IoT: Brainport 31 May 2018 16.00-17.00 CET 31/05/2018 This project has received funding from the European Union s Horizon 2020 research
AUTOPILOT Webinar Series (II): Developing Automated Driving Pilots for IoT: Brainport 31 May 2018 16.00-17.00 CET 31/05/2018 This project has received funding from the European Union s Horizon 2020 research
2016 IGVC Design Report Submitted: May 13, 2016
 2016 IGVC Design Report Submitted: May 13, 2016 I certify that the design and engineering of the vehicle by the current student team has been significant and equivalent to what might be awarded credit
2016 IGVC Design Report Submitted: May 13, 2016 I certify that the design and engineering of the vehicle by the current student team has been significant and equivalent to what might be awarded credit
Rover - Remote Operated Vehicle for Extraction and Reconnaissance
 IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 9, Issue 4 (Nov. - Dec. 2013), PP 38-42 Rover - Remote Operated Vehicle for Extraction and Reconnaissance
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 9, Issue 4 (Nov. - Dec. 2013), PP 38-42 Rover - Remote Operated Vehicle for Extraction and Reconnaissance
Le développement technique des véhicules autonomes
 Shaping the future Le développement technique des véhicules autonomes Renaud Dubé, Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Fribourg, 23 Juin 2016 Renaud Dubé 23.06.2016 1 Content
Shaping the future Le développement technique des véhicules autonomes Renaud Dubé, Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Fribourg, 23 Juin 2016 Renaud Dubé 23.06.2016 1 Content
INTRODUCTION Team Composition Electrical System
 IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
RED RAVEN, THE LINKED-BOGIE PROTOTYPE. Ara Mekhtarian, Joseph Horvath, C.T. Lin. Department of Mechanical Engineering,
 RED RAVEN, THE LINKED-BOGIE PROTOTYPE Ara Mekhtarian, Joseph Horvath, C.T. Lin Department of Mechanical Engineering, California State University, Northridge California, USA Abstract RedRAVEN is a pioneered
RED RAVEN, THE LINKED-BOGIE PROTOTYPE Ara Mekhtarian, Joseph Horvath, C.T. Lin Department of Mechanical Engineering, California State University, Northridge California, USA Abstract RedRAVEN is a pioneered