Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, GMT
|
|
|
- Easter Naomi Conley
- 5 years ago
- Views:
Transcription
1 Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, GMT
2 Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut (estimated top speed 1.5m/s) Drive over a 30cm obstacle Drive on a 20 deg slope in any direction with nominal payload Payload accessible for 5%ile female through 95%ile male Accommodate all lunar thermal environments Self-contained power supplies for 8 hour EVA Size Requirements Max stowed mass: 100 kg Max stowed dimension: 2 m Max stowed volume: 3 m^3 Capabilities Capable of independent missions Capable of self-tended recharging
3 ASU Mission Requirements Mission: o Land in Oceanus Procellarum (20 o N, 40 o W) Exploration with astronauts o Continue in autonomous/tele-operated mode after astronauts depart Rover should survive a minimum of 3 months on lunar surface Scientific Objectives o Remotely identify rock composition o Ability to catalog samples of interest (location, spectrum) o Observe surface morphology o Test obstacle avoidance methods to be used by future autonomous rovers
4 ASU Instrumentation Heritage Science Instruments o Thermal Emission Spectrometer Based on MER Mini-TES Remote detection of rock composition o Two visible light cameras with a CMOS image sensor Based on MER PanCam Stereo images/panoramas of surroundings Assess the topography, mineralogy, and geological context around the landing site Microscopic Imager o Color CCD sensor o Document rocks and regolith

5 ALUM Rover High Gain Antenna Navigation Mast (Stereo and Omnidirectional Cameras) Payload Module Robotic Arm Battery Module Tweel Hub-mounted Brushless DC Motor Dust Guard Avionics
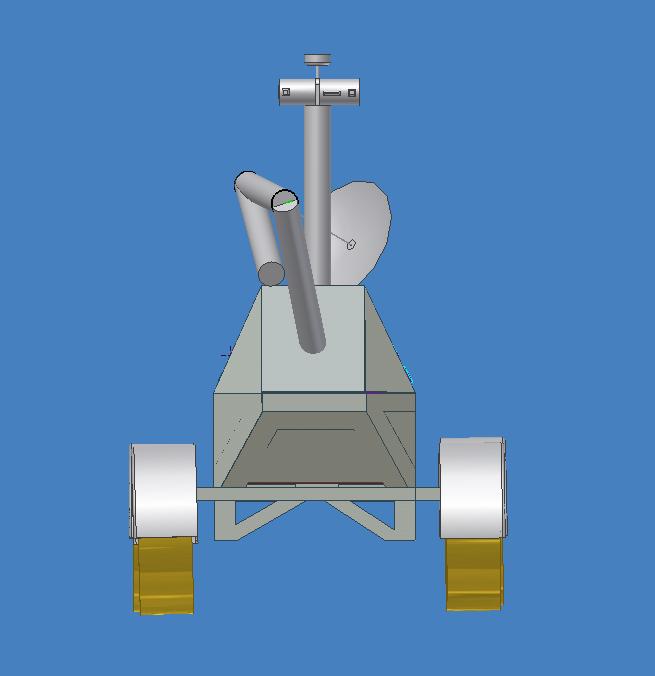
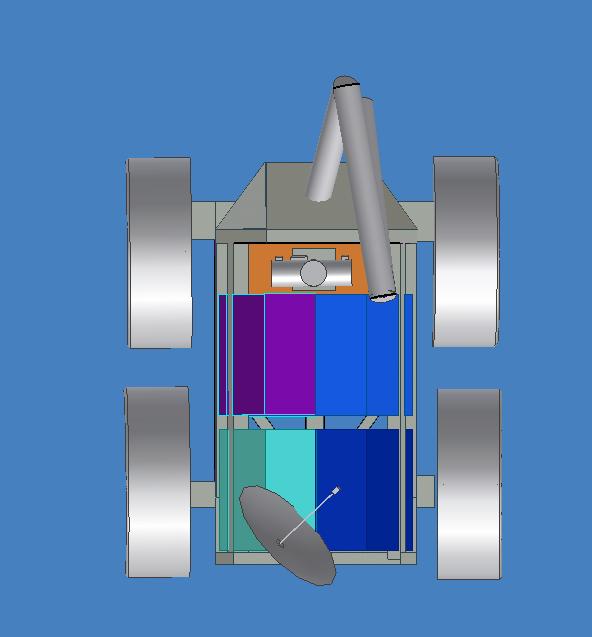
6 Rover Dimensions 1.4 m 1.2 m 1.6 m

7 Modular Approach Payload Modules Astronaut Tool Modules Sample Collection Modules Life support module for extended duration EVAs Science instruments Hinged bar restrains modules
8 Power System Power Requirements Torque = 40 N*m, max speed = 1.5 m/s 91W / wheel Assume 75% efficiency => 500W total for the wheels Plus power to run equipment Total (estimated) energy required = 5kW-hr Considerations Lithium-sulfur batteries (rechargeable): high specific energy density Wh/kg Lithium-ion batteries (rechargeable): Wh/kg Solar panels Total Capacity 10 kw-hr (theoretical)
9 Wheel Rationale Pros Cons Pneumatic Mechanically Simple Pressure vessel, Thermal Response Aluminum Mesh Offers shock absorption Used on LRV Limited life due to fatigue Tweel Offers shock absorption on par with pneumatic New technology, needs to be adapted to lunar environment Design choice: Tweel Considerations 1.Durable and superior performance 2.Currently being developed for lunar applications
10 Steering Selection Pros Cons Skid Steer Mechanically Simple Kicks up Too Much Dust Inefficient Steering Single Ackerman 4W Steer More efficient turning Won't kick up as much dust as Skid Steering Can perform any type of steering Can turn in place Increased Complexity and Mass Each wheel would require a steering motor Design choice: Single Ackerman Rationale: Astronauts won't be restricted to moving in straight lines, especially when navigating rough terrain Astronauts will be working in close proximity to the rovers, making dust an increased concern

11 Suspension Rationale Pros Cons Active Suspension Navigate rugged terrain Increased complexity, Requires computation Double Wishbone Passive, proven technology (LRV) Significant Mass MacPherson Strut Passive, low-mass Limited ability to tune kinematics Design choice: MacPherson strut Rationale: Passive system frees computational power Traverse speed is high Photo courtesy of Honda

12 Stability Stability on Flat Terrain o Accelerations up 1m/s^2 o At v = 1m/s, radius of curvature 1m o At v = 0.5m/s, radius of curvature 0.2m Stability on 20 deg slope: o Accelerations up to 0.4 m/s 2 20 deg upslope o At v=1m/s, radius of curvature of 2m o At v=0.5m/s, radius of curvature up to 0.5m
13 Mass Budget Item Quantity Mass (kg) Total Mass (kg) Wheel Batteries Visible light camera Wheel motors Gearboxes GNC Computer - - TBD High gain antenna Low gain antenna Suspension and Structure - - TBD Solar Panels TOTAL
14 Rover Operation on EVA The astronaut will be able to... Operate rover using controls on suit Assign scientific tasks o Picking up rock samples o Use of instruments Set waypoints for the rover View images and data from the rover on a viewscreen Approach and access rover without the rover moving

15 Astronaut Control on EVA Arm-mounted control panel with viewscreen o See what rover sees o Touchscreen to set targets for travel or manipulation o Display navigation information Laser pointer to designate targets o Waypoints o Instruct rover to manipulate samples with robotic arm Image by SAIC

16 Astronaut Access to Rover Rover height was chosen based on work envelopes of 5th percentile females and 95th percentile males Astronauts can access rear modules from behind the rover Modules carrying tools may have racks extended over the wheels for easier access
17 Modes of Operation between EVA and after Astronaut Departure Autonomous Reconnaissance o Scout for areas of interest between EVA's o Take images and other data and transmit to Astronauts or operators on Earth o Used to decide where to explore Teleoperation Mode o Operate the rover from habitat o Set way points for the rover o Similar control as if on EVA
18 Navigation and Obstacle Avoidance Astronaut Following o Rely on Astronaut's natural ability to avoid obstacles o Track and follow Astronaut's path o Keep a safe distance from the Astronaut Stereoscopic image processing o Process stereo images to identify obstacles o For use in autonomous modes, where rover speed isn't critical Positioning o IMU for relative position and orientation o Star tracker for absolute position
19 Recharging During crew mission Rover will also use stereo vision to dock with charge port After crew departure Before crew departs, a solar panel will be placed on the rover to provide power
20 Bibliography Bell, J F., et al. (2003), Mars exploration rover athena panoramic camera (pancam) investigation. Journal of Geophysical Research, 108(E12), Christensen, P R., et al. (2003), Miniature thermal emission spectrometer for the Mars exploration rovers, Journal of geophysical research Edgett, K S., et al. (2009), The Mars Hand Lens Imager (MAHLI) aboard the Mars rover, Curiosity, Lunar and Planetary Institute Contribution 1505, p. 5. Taylor, L. (1991), Helium abundances on the moon: Assumptions and estimates, Arizona Univ., Resources of Near-Earth Space: Abstracts p 40 (SEE N ).
21 Questions?
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science
 Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
Lunar Architecture and LRO
 Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
An Overview of CSA s s Space Robotics Activities
 An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
NEXT Exploration Science and Technology Mission. Relevance for Lunar Exploration
 NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity
 The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
Light-Lift Rocket II
 Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
The European Lunar Lander Mission
 The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
Planetary Surface Transportation and Site Development
 Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
Analysis of Power Storage Media for the Exploration of the Moon
 Analysis of Power Storage Media for the Exploration of the Moon Michael Loweth, Rachel Buckle ICEUM 9 22-26 th October 2007 ABSL Space Products 2005 2007 Servicing USA and the ROW UNITED KINGDOM Culham
Analysis of Power Storage Media for the Exploration of the Moon Michael Loweth, Rachel Buckle ICEUM 9 22-26 th October 2007 ABSL Space Products 2005 2007 Servicing USA and the ROW UNITED KINGDOM Culham
Name: Space Exploration PBL
 Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
European Lunar Lander: System Engineering Approach
 human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
Lunette: A Global Network of Small Lunar Landers
 Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Adrestia. A mission for humanity, designed in Delft. Challenge the future
 Adrestia A mission for humanity, designed in Delft 1 Adrestia Vision Statement: To inspire humanity by taking the next step towards setting a footprint on Mars Mission Statement Our goal is to design an
Adrestia A mission for humanity, designed in Delft 1 Adrestia Vision Statement: To inspire humanity by taking the next step towards setting a footprint on Mars Mission Statement Our goal is to design an
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES
 FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Soviet Lunokhod 1 and 2 missions and things around
 Soviet Lunokhod 1 and 2 missions and things around Alexander Basilevsky Vernadsky Institute of Geochemistry and Analytical Chemistry Russian Academy of Sciences, Moscow, Russia and Department of Geological
Soviet Lunokhod 1 and 2 missions and things around Alexander Basilevsky Vernadsky Institute of Geochemistry and Analytical Chemistry Russian Academy of Sciences, Moscow, Russia and Department of Geological
Two Related Primary Challenges for Successful Renewed Lunar Exploration
 Two Related Primary Challenges for Successful Renewed Lunar Exploration October 10, 2017 Presented By Ron Creel Retired Apollo Lunar Roving Vehicle Team Member OUTLINE Challenge 1 Coping with Exposure
Two Related Primary Challenges for Successful Renewed Lunar Exploration October 10, 2017 Presented By Ron Creel Retired Apollo Lunar Roving Vehicle Team Member OUTLINE Challenge 1 Coping with Exposure
On the feasibility of a fast track return to Mars
 On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
Canadian Lunar & Planetary Rover. Development
 Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers
 Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers Instructions You have just been notified that NASA is planning to launch another Mars Rover Mission and you are going to design
Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers Instructions You have just been notified that NASA is planning to launch another Mars Rover Mission and you are going to design
From MARS To MOON. V. Giorgio Director of Italian Programs. Sorrento, October, All rights reserved, 2007, Thales Alenia Space
 From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
Landing Targets and Technical Subjects for SELENE-2
 Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Innovative Mars exploration rover using inflatable or unfolding wheels
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
Lunar Robotics. Dr. Rob Ambrose, NASA JSC December Dr. Robert O. Ambrose
 Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
Lunar Robotics Dr. Rob Ambrose, NASA JSC December 27 Dr. Robert O. Ambrose NASA Johnson Space Center Houston Texas April 27 R. Ambrose, (281) 2-5561 December 27 Pg. 1 Outline A look at the Constellation
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE
 INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
Mars Surface Mobility Proposal
 Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability
 Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability 2007 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar
Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability 2007 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar
Robots to Support a Human Mars Mission
 Robots to Support a Human Mars Mission 1 W. Naumann, P. Hofmann, A. v. Richter Kayser-Threde GmbH Wolfratshauser Str. 48, D-81379 München email: andreas.von.richter@kayser-threde.com 7th Workshop ASTRA
Robots to Support a Human Mars Mission 1 W. Naumann, P. Hofmann, A. v. Richter Kayser-Threde GmbH Wolfratshauser Str. 48, D-81379 München email: andreas.von.richter@kayser-threde.com 7th Workshop ASTRA
Japanese Rover Test-bed for Lunar Exploration
 Japanese Rover Test-bed for Lunar Exploration Takashi Kubota*, Yasuharu Kunii**, Yoji Kuroda***, Masatsygu Otsuki* *ISAS/JAXA, 3-1-1, Yoshinodai, Sagamihara 229-8510, JAPAN **Chuo University, 1-13-27,
Japanese Rover Test-bed for Lunar Exploration Takashi Kubota*, Yasuharu Kunii**, Yoji Kuroda***, Masatsygu Otsuki* *ISAS/JAXA, 3-1-1, Yoshinodai, Sagamihara 229-8510, JAPAN **Chuo University, 1-13-27,
Massachusetts Space Grant Consortium
 Massachusetts Space Grant Consortium Distinguished Lecturer Series NASA Administrator Dr. Michael Griffin NASA s Exploration Architecture March 8, 2006 Why We Explore Human curiosity Stimulates our imagination
Massachusetts Space Grant Consortium Distinguished Lecturer Series NASA Administrator Dr. Michael Griffin NASA s Exploration Architecture March 8, 2006 Why We Explore Human curiosity Stimulates our imagination
LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE
 LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE ABSTRACT With 1 rover, 2 astronauts and 3 days, the Apollo 17 Mission covered over 30 km, setup
LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE ABSTRACT With 1 rover, 2 astronauts and 3 days, the Apollo 17 Mission covered over 30 km, setup
Analysis of Architectures for Long-Range Crewed Moon and Mars Surface Mobility
 AIAA SPACE 2008 Conference & Exposition 9-11 September 2008, San Diego, California AIAA 2008-7914 Analysis of Architectures for Long-Range Crewed Moon and Mars Surface Mobility Wilfried K. Hofstetter 1,
AIAA SPACE 2008 Conference & Exposition 9-11 September 2008, San Diego, California AIAA 2008-7914 Analysis of Architectures for Long-Range Crewed Moon and Mars Surface Mobility Wilfried K. Hofstetter 1,
Next Steps in Human Exploration: Cislunar Systems and Architectures
 Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Rover development status
 EXOMARS PROJECT 2018 Mission Rover development status ASTRA Workshop 15-17 May 2013 P. Baglioni & the EXM Rover Team Progress on the 2018 Mission Following EXM Program approvals from the Council and IPC
EXOMARS PROJECT 2018 Mission Rover development status ASTRA Workshop 15-17 May 2013 P. Baglioni & the EXM Rover Team Progress on the 2018 Mission Following EXM Program approvals from the Council and IPC
On Orbit Refueling: Supporting a Robust Cislunar Space Economy
 On Orbit Refueling: Supporting a Robust Cislunar Space Economy Courtesy of NASA 3 April 2017 Copyright 2014 United Launch Alliance, LLC. All Rights Reserved. Atlas V Launch History ULA s Vision: Unleashing
On Orbit Refueling: Supporting a Robust Cislunar Space Economy Courtesy of NASA 3 April 2017 Copyright 2014 United Launch Alliance, LLC. All Rights Reserved. Atlas V Launch History ULA s Vision: Unleashing
A New Facility for Lander Touchdown and Rover Mobility Testing at DLR
 A New Facility for Lander Touchdown and Rover Mobility Testing at DLR Lutz Richter, Antje Brucks, Lars Witte DLR Institute of Space Systems, Bremen, Germany New DLR Institute of Space Systems Systems Analysis
A New Facility for Lander Touchdown and Rover Mobility Testing at DLR Lutz Richter, Antje Brucks, Lars Witte DLR Institute of Space Systems, Bremen, Germany New DLR Institute of Space Systems Systems Analysis
Challenges of Designing the MarsNEXT Network
 Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Case Study: Term Project
 Case Study: Term Project Expectations for the term project An example of a previous term project U N I V E R S I T Y O F MARYLAND 1 2016 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu
Case Study: Term Project Expectations for the term project An example of a previous term project U N I V E R S I T Y O F MARYLAND 1 2016 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu
LUNAR WHEEL TEAM TEAM: ADAM ANDERSON DAN BARRET RICHARD FREDRICKSON KRISTINA LYNN RAMOS ERIC SOLIS. ADVISORS: Dr. COLIN BRITCHER Dr.
 LUNAR WHEEL TEAM TEAM: ADAM ANDERSON DAN BARRET RICHARD FREDRICKSON KRISTINA LYNN RAMOS ERIC SOLIS ADVISORS: Dr. COLIN BRITCHER Dr. SEBASTIAN BAWAB OBJECTIVE design a wheel that would be resistant to the
LUNAR WHEEL TEAM TEAM: ADAM ANDERSON DAN BARRET RICHARD FREDRICKSON KRISTINA LYNN RAMOS ERIC SOLIS ADVISORS: Dr. COLIN BRITCHER Dr. SEBASTIAN BAWAB OBJECTIVE design a wheel that would be resistant to the
CALL FOR IDEAS FOR THE RE-USE OF THE MARS EXPRESS PLATFORM PLATFORM CAPABILITIES. D. McCoy
 Mars Express Reuse: Call for Ideas CALL FOR IDEAS FOR THE RE-USE OF THE MARS EXPRESS PLATFORM PLATFORM CAPABILITIES D. McCoy PARIS 23 MARCH 2001 page 1 Mars Express Reuse: Call for Ideas PRESENTATION CONTENTS
Mars Express Reuse: Call for Ideas CALL FOR IDEAS FOR THE RE-USE OF THE MARS EXPRESS PLATFORM PLATFORM CAPABILITIES D. McCoy PARIS 23 MARCH 2001 page 1 Mars Express Reuse: Call for Ideas PRESENTATION CONTENTS
NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration
 National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
Space Robotics Planetary Exploration - a DLR Perspective
 Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012
 Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Resource Prospector Traverse Planning
 Resource Prospector Traverse Planning Jennifer Heldmann (NASA Ames / NASA Headquarters) Anthony Colaprete (NASA Ames Research Center) Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters)
Resource Prospector Traverse Planning Jennifer Heldmann (NASA Ames / NASA Headquarters) Anthony Colaprete (NASA Ames Research Center) Richard Elphic (NASA Ames Research Center) Ben Bussey (NASA Headquarters)
RIMRES: A project summary
 RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
Design of Mobility System for Ground Model of Planetary Exploration Rover
 Technical Paper J. Astron. Space Sci. 29(4), 413-422 (2012) Design of Mobility System for Ground Model of Planetary Exploration Rover Younkyu Kim 1, Wesub Eom 1, Joo-Hee Lee 1, 2, and Eun-Sup Sim 1 1 Aerospace
Technical Paper J. Astron. Space Sci. 29(4), 413-422 (2012) Design of Mobility System for Ground Model of Planetary Exploration Rover Younkyu Kim 1, Wesub Eom 1, Joo-Hee Lee 1, 2, and Eun-Sup Sim 1 1 Aerospace
Robo$cs Mission Experience from Mars. Brian Wilcox Mark Maimone Andy Mishkin 5 August 2009
 Robo$cs Mission Experience from Mars Brian Wilcox Mark Maimone Andy Mishkin 5 August 2009 MER Mobility Hardware Wide FOV stereo HAZCAMs (front & rear) for on-board hazard detection Stereo NAVCAMS & PANCAMS
Robo$cs Mission Experience from Mars Brian Wilcox Mark Maimone Andy Mishkin 5 August 2009 MER Mobility Hardware Wide FOV stereo HAZCAMs (front & rear) for on-board hazard detection Stereo NAVCAMS & PANCAMS
INTRODUCTION Team Composition Electrical System
 IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
Travel: Detailed Flight Plan
 DarkSide Logistics Lunar Spaceport Initiative Travel: Detailed Flight Plan The payload will be launched from Cape Canaveral Air Force Station Launch Complex 46 at 15:59:35 ET on January 25, 2010, using
DarkSide Logistics Lunar Spaceport Initiative Travel: Detailed Flight Plan The payload will be launched from Cape Canaveral Air Force Station Launch Complex 46 at 15:59:35 ET on January 25, 2010, using
OMOTENASHI. (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor)
") SLS EM-1 secondary payload OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) The smallest moon lander launched by the most powerful rocket in the world * Omotenashi
SLS EM-1 secondary payload OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) The smallest moon lander launched by the most powerful rocket in the world * Omotenashi
Design and Navigation of Flying Robots
 Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return
 Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
Sample Fetching Rover - Lightweight Rover Concepts for Mars Sample Return Elie Allouis, Elie.Allouis@astrium.eads.net T.Jorden, N.Patel, A.Ratcliffe ASTRA 2011 ESTEC 14 April 2011 Contents Scope Introduction
Astro the Rover. Olympus Mons Rover Team
 Astro the Rover Olympus Mons Rover Team 2014-2015 Purpose: Design a robotic vehicle capable of performing tasks for a sample return mission within the parameters and requirements of the University Rover
Astro the Rover Olympus Mons Rover Team 2014-2015 Purpose: Design a robotic vehicle capable of performing tasks for a sample return mission within the parameters and requirements of the University Rover
Mobile Payload Element (MPE)
") Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
SAE Mini BAJA: Suspension and Steering
 SAE Mini BAJA: Suspension and Steering By Zane Cross, Kyle Egan, Nick Garry, Trevor Hochhaus Team 11 Progress Report Submitted towards partial fulfillment of the requirements for Mechanical Engineering
SAE Mini BAJA: Suspension and Steering By Zane Cross, Kyle Egan, Nick Garry, Trevor Hochhaus Team 11 Progress Report Submitted towards partial fulfillment of the requirements for Mechanical Engineering
Europa Lander. Mission Concept Update 3/29/2017
 Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
Europa Lander Mission Concept Update 3/29/2017 2017 California Institute of Technology. Government sponsorship acknowledged. 1 Viable Lander/Carrier Mission Concept Cruise/Jovian Tour Jupiter orbit insertion
Reference Science Scenario for SDT Report
 MARS 2007 SMART LANDER Reference Science Scenario for SDT Report 9/17/01 Jennifer Mindock Leslie Tamppari Daniel Limonadi Sue Smrekar Reference Mission Big Picture Total duration of mission = 180 sols
MARS 2007 SMART LANDER Reference Science Scenario for SDT Report 9/17/01 Jennifer Mindock Leslie Tamppari Daniel Limonadi Sue Smrekar Reference Mission Big Picture Total duration of mission = 180 sols
LUNAR INDUSTRIAL RESEARCH BASE. Yuzhnoye SDO proprietary
 LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
MIT: MoRETA Citation: Miller, D (2009). MoRETA: CDIO Knowledge Library, Cambridge, Mass: CDIO Global Initiative,
. MoRETA: CDIO Knowledge Library, Cambridge, Mass: CDIO Global Initiative,") CDIO KNOWLEDGE LIBRARY MIT: MoRETA Citation: Miller, D (2009). MoRETA: CDIO Knowledge Library, Cambridge, Mass: CDIO Global Initiative, www.cdio.org 1. Project Overview (1 page) 1 1.1. Overall goal or
CDIO KNOWLEDGE LIBRARY MIT: MoRETA Citation: Miller, D (2009). MoRETA: CDIO Knowledge Library, Cambridge, Mass: CDIO Global Initiative, www.cdio.org 1. Project Overview (1 page) 1 1.1. Overall goal or
Lunar Escape: Development of Astronaut Recovery Rover Program
 Lunar Escape: Development of Astronaut Recovery Rover Program Nicholas Wade-Mayhue, Dan Janke, Kyle Kilgore, Mohammed Alzohay, Samad Qureshi Colorado School of Mines Advisor: Dr. Knecht nwademay@mines.edu
Lunar Escape: Development of Astronaut Recovery Rover Program Nicholas Wade-Mayhue, Dan Janke, Kyle Kilgore, Mohammed Alzohay, Samad Qureshi Colorado School of Mines Advisor: Dr. Knecht nwademay@mines.edu
VISION-BASED NAVIGATION TECHNIQUES IN PLANETARY ROVERS
 REPORT 15.12.2010 VISION-BASED NAVIGATION TECHNIQUES IN PLANETARY ROVERS Hans Baumgartner 6153583 CONTENTS ABBREVIATIONS... 3 1. INTRODUCTION... 4 2. PLANETARY ROVERS... 5 2.1 History... 5 2.2 Sensors
REPORT 15.12.2010 VISION-BASED NAVIGATION TECHNIQUES IN PLANETARY ROVERS Hans Baumgartner 6153583 CONTENTS ABBREVIATIONS... 3 1. INTRODUCTION... 4 2. PLANETARY ROVERS... 5 2.1 History... 5 2.2 Sensors
Smart Robots on Mars: Deciding Where to Go and. What to See
 Smart Robots on Mars: Deciding Where to Go and What to See Kiri L. Wagstaff September 16, 2008 INTRODUCTION T he planet Mars has much in common with the Earth, including a similar rocky composition and
Smart Robots on Mars: Deciding Where to Go and What to See Kiri L. Wagstaff September 16, 2008 INTRODUCTION T he planet Mars has much in common with the Earth, including a similar rocky composition and
Wheeled Mobile Robots
 Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS. Nagin Cox
 THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS Nagin Cox Jet Propulsion Laboratory National Air & Space Administration/California Institute of Technology Email: nagin@jpl.nasa.gov Abstract: Since
THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS Nagin Cox Jet Propulsion Laboratory National Air & Space Administration/California Institute of Technology Email: nagin@jpl.nasa.gov Abstract: Since
Palamede, more than a microsatellite. Workshop on University Micro Satellites in Italy Rome, July 27, 2005
 Palamede, more than a microsatellite The Palamede Team (represented by Franco Bernelli and Roberto Armellin) Workshop on University Micro Satellites in Italy Rome, July 27, 2005 Outline Mission and educational
Palamede, more than a microsatellite The Palamede Team (represented by Franco Bernelli and Roberto Armellin) Workshop on University Micro Satellites in Italy Rome, July 27, 2005 Outline Mission and educational
Mobile Surface Systems in a Moonbase System of Systems
 Mobile Surface Systems in a Moonbase System of Systems Robert Howard, Edward Tunstel, Dane Elliott-Lewis, Horace Bussey, Jasmine Bridges, Christianna Taylor NSBE Space Special Interest Group NSBE-Alumni
Mobile Surface Systems in a Moonbase System of Systems Robert Howard, Edward Tunstel, Dane Elliott-Lewis, Horace Bussey, Jasmine Bridges, Christianna Taylor NSBE Space Special Interest Group NSBE-Alumni
MASCOT Marco Polo Surface Scout. Progress Report on Lander Package Study for Marco Polo
 MASCOT Marco Polo Surface Scout Progress Report on Lander Package Study for Marco Polo Lutz Richter 1, Lars Witte 1, Tra-Mi Ho 1, Stephan Ulamec 2, Jean-Pierre Bibring 3 1 DLR Bremen, 2 DLR Cologne, 3
MASCOT Marco Polo Surface Scout Progress Report on Lander Package Study for Marco Polo Lutz Richter 1, Lars Witte 1, Tra-Mi Ho 1, Stephan Ulamec 2, Jean-Pierre Bibring 3 1 DLR Bremen, 2 DLR Cologne, 3
16.89J / ESD.352J Space Systems Engineering
 MIT OpenCourseWare http://ocw.mit.edu 16.89J / ESD.352J Space Systems Engineering Spring 2007 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 16.89 /
MIT OpenCourseWare http://ocw.mit.edu 16.89J / ESD.352J Space Systems Engineering Spring 2007 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 16.89 /
Industrial-and-Research Lunar Base
 Industrial-and-Research Lunar Base STRATEGY OF LUNAR BASE CREATION Phase 1 Preparatory: creation of international cooperation, investigation of the Moon by unmanned spacecraft, creation of space transport
Industrial-and-Research Lunar Base STRATEGY OF LUNAR BASE CREATION Phase 1 Preparatory: creation of international cooperation, investigation of the Moon by unmanned spacecraft, creation of space transport
Lunar Science and Infrastructure with the Future Lunar Lander
 ICEUM9 Sorrento Lunar Science and Infrastructure with the Future Lunar Lander Session 9: Next steps for Robotic Landers, Rovers and Outposts ICEUM9 Sorrento, Oct. 26, 2007 Hansjürgen Günther 26/10/2007
ICEUM9 Sorrento Lunar Science and Infrastructure with the Future Lunar Lander Session 9: Next steps for Robotic Landers, Rovers and Outposts ICEUM9 Sorrento, Oct. 26, 2007 Hansjürgen Günther 26/10/2007
Suitability of reusability for a Lunar re-supply system
 www.dlr.de Chart 1 Suitability of reusability for a Lunar re-supply system Etienne Dumont Space Launcher Systems Analysis (SART) Institut of Space Systems, Bremen, Germany Etienne.dumont@dlr.de IAC 2016
www.dlr.de Chart 1 Suitability of reusability for a Lunar re-supply system Etienne Dumont Space Launcher Systems Analysis (SART) Institut of Space Systems, Bremen, Germany Etienne.dumont@dlr.de IAC 2016
Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce
 Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce Dr. Allison Zuniga, Mark Turner and Dr. Dan Rasky NASA Ames Research Center Space Portal Office Mike
Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce Dr. Allison Zuniga, Mark Turner and Dr. Dan Rasky NASA Ames Research Center Space Portal Office Mike
AFG Project Update Spring 2006 Semester 02/15/2006
 AFG Project Update Spring 2006 Semester 02/15/2006 Proposal: Unmanned Ground Vehicle Alternative Energy and Sensors Research Under this research program, the recipient will design, build, and test the
AFG Project Update Spring 2006 Semester 02/15/2006 Proposal: Unmanned Ground Vehicle Alternative Energy and Sensors Research Under this research program, the recipient will design, build, and test the
Exploration Architecture Update
 Exploration Architecture Update Doug Cooke Deputy Associate Administrator Exploration Systems Mission Directorate John Connolly Vehicle Engineering and Integration Lunar Lander Project Office March 14,
Exploration Architecture Update Doug Cooke Deputy Associate Administrator Exploration Systems Mission Directorate John Connolly Vehicle Engineering and Integration Lunar Lander Project Office March 14,
In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led
 was founded by current company President Alexander Zakharov, since then he has led") A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
Performance Evaluation of Wheeled Rover by Analysis and Test
 Performance Evaluation of Wheeled Rover by Analysis and Test Gaurav Sharma, Srividhya G., Shamrao, K. Balaji, G. Nagesh, C.D. Sridhara Abstract Rovers provide a mobile platform for exploring planetary
Performance Evaluation of Wheeled Rover by Analysis and Test Gaurav Sharma, Srividhya G., Shamrao, K. Balaji, G. Nagesh, C.D. Sridhara Abstract Rovers provide a mobile platform for exploring planetary
This is Ground Control... Professor Derek Long Department of Informatics King s College London
 This is Ground Control... Professor Derek Long Department of Informatics King s College London Deep in Space... Rosetta and Philae 67P/Churyumov-Gerasimenko Launch 2004, arrive 2014 Mars Express 2003 Mars
This is Ground Control... Professor Derek Long Department of Informatics King s College London Deep in Space... Rosetta and Philae 67P/Churyumov-Gerasimenko Launch 2004, arrive 2014 Mars Express 2003 Mars
ASTRIUM. Lunar Lander Concept for LIFE. Hansjürgen Günther TOB 11. Bremen, 23/
 Lunar Lander Concept for LIFE Hansjürgen Günther TOB 11 Bremen, 23/24.11.2006 This document is the property of EADS SPACE. It shall not be communicated to third parties without prior written agreement.its
Lunar Lander Concept for LIFE Hansjürgen Günther TOB 11 Bremen, 23/24.11.2006 This document is the property of EADS SPACE. It shall not be communicated to third parties without prior written agreement.its
TALON Robot Rechargeable Battery Audio Vehicle Dimensions Endurance Vehicle Communication Ports OCU Rechargeable Battery Endurance Optional Sensors
 TALON Vehicle Dimensions Height (arm stowed): 18 in. (42.7 cm) Height (arm extended): 52 in. (1.3m) Width: 22.5 in. (57.2 cm) Length: 34 in. (86.4 cm) Horizontal reach: 52 in. (1.3m) Below grade reach:
TALON Vehicle Dimensions Height (arm stowed): 18 in. (42.7 cm) Height (arm extended): 52 in. (1.3m) Width: 22.5 in. (57.2 cm) Length: 34 in. (86.4 cm) Horizontal reach: 52 in. (1.3m) Below grade reach:
Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics: Results and Roadmaps
 National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
Microbots for Large-Scale Planetary Surface and Subsurface Exploration
 Microbots for Large-Scale Planetary Surface and Subsurface Exploration Steven Dubowsky, Principal Investigator Karl Iagnemma, Co-Investigator Field and Space Robotics Laboratory Massachusetts Institute
Microbots for Large-Scale Planetary Surface and Subsurface Exploration Steven Dubowsky, Principal Investigator Karl Iagnemma, Co-Investigator Field and Space Robotics Laboratory Massachusetts Institute
lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow
 lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow John Connolly Lunar Lander Project Office 1 Components of Program Constellation Earth Departure Stage Ares V - Heavy
lights on, down 2 ½ 40 feet, down 2 ½ Kickin up some dust 30 feet, 2 ½ down faint shadow John Connolly Lunar Lander Project Office 1 Components of Program Constellation Earth Departure Stage Ares V - Heavy
The Mars Express Mission A Continuing Challenge. Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner
 The Mars Express Mission A Continuing Challenge Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner Mars Society, Munich, 13 October, 2012 The Mars Express Mission - a First in
The Mars Express Mission A Continuing Challenge Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner Mars Society, Munich, 13 October, 2012 The Mars Express Mission - a First in
DYNAMIC LOAD IN OPERATION OF HIGH-SPEED TRACKED VEHICLES
 Journal of KONES Powertrain and Transport, Vol. 16, No. 4 29 DYNAMIC LOAD IN OPERATION OF HIGH-SPEED TRACKED VEHICLES Wac aw Borkowski, Piotr Rybak Military University of Technology S. Kaliskiego Street
Journal of KONES Powertrain and Transport, Vol. 16, No. 4 29 DYNAMIC LOAD IN OPERATION OF HIGH-SPEED TRACKED VEHICLES Wac aw Borkowski, Piotr Rybak Military University of Technology S. Kaliskiego Street
IMAGING LIDAR TECHNOLOGY Development of a 3D-LIDAR Elegant Breadboard for Rendezvous & Docking, Test Results, Prospect to Future Sensor Application
 B. Moebius Jena-Optronik/ Germany, M. Pfennigbauer Riegl Measurement Systems/ Austria, J. Pereira do Carmo ESTEC/ The Netherlands IMAGING LIDAR TECHNOLOGY Development of a 3D-LIDAR Elegant Breadboard for
B. Moebius Jena-Optronik/ Germany, M. Pfennigbauer Riegl Measurement Systems/ Austria, J. Pereira do Carmo ESTEC/ The Netherlands IMAGING LIDAR TECHNOLOGY Development of a 3D-LIDAR Elegant Breadboard for
Station for Exploratory Analysis and Research Center for Humanity (SEARCH)
") Station for Exploratory Analysis and Research Center for Humanity (SEARCH) Authors: Jasmine Wong, Matthew Decker, Joseph Lewis, Megerditch Arabian, and Dr. Peter Bishay California State University, Northridge
Station for Exploratory Analysis and Research Center for Humanity (SEARCH) Authors: Jasmine Wong, Matthew Decker, Joseph Lewis, Megerditch Arabian, and Dr. Peter Bishay California State University, Northridge
Lunar Surface Access from Earth-Moon L1/L2 A novel lander design and study of alternative solutions
 Lunar Surface Access from Earth-Moon L1/L2 A novel lander design and study of alternative solutions 28 November 2012 Washington, DC Revision B Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
Lunar Surface Access from Earth-Moon L1/L2 A novel lander design and study of alternative solutions 28 November 2012 Washington, DC Revision B Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
Gravity Control Technologies Phase I - Unmanned Prototype
 archived as http://www.stealthskater.com/documents/gct_02.pdf read more of GCT at http://www.stealthskater.com/ufo.htm#gct note: because important websites are frequently "here today but gone tomorrow",
archived as http://www.stealthskater.com/documents/gct_02.pdf read more of GCT at http://www.stealthskater.com/ufo.htm#gct note: because important websites are frequently "here today but gone tomorrow",
Human Exploration of the Lunar Surface
 International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
International Space Exploration Coordination Group Human Exploration of the Lunar Surface International Architecture Working Group Future In-Space Operations Telecon September 20, 2017 Icon indicates first
Future NASA Power Technologies for Space and Aero Propulsion Applications. Presented to. Workshop on Reforming Electrical Energy Systems Curriculum
 Future NASA Power Technologies for Space and Aero Propulsion Applications Presented to Workshop on Reforming Electrical Energy Systems Curriculum James F. Soeder Senior Technologist for Power NASA Glenn
Future NASA Power Technologies for Space and Aero Propulsion Applications Presented to Workshop on Reforming Electrical Energy Systems Curriculum James F. Soeder Senior Technologist for Power NASA Glenn
VLVnT Installation and Maintenance of the submarine network
 VLVnT Installation and Maintenance of submarine network The Maintenance aspect present some difficult as ir cost is very v high. For this reason it s important: Redundancy where possible Reliability prevision
VLVnT Installation and Maintenance of submarine network The Maintenance aspect present some difficult as ir cost is very v high. For this reason it s important: Redundancy where possible Reliability prevision
Lunar Escape. Astronaut Rescue and Recovery Rover. Members: Mohammad Alzohay, Dan Janke, Kyle Kilgore, Samad Qureshi, Nicholas Wade-Mayhue
 Lunar Escape Astronaut Rescue and Recovery Rover Members: Mohammad Alzohay, Dan Janke, Kyle Kilgore, Samad Qureshi, Nicholas Wade-Mayhue Lunar Escape 1 Little Astronaut, Big Planet Lunar Escape 2 Moon
Lunar Escape Astronaut Rescue and Recovery Rover Members: Mohammad Alzohay, Dan Janke, Kyle Kilgore, Samad Qureshi, Nicholas Wade-Mayhue Lunar Escape 1 Little Astronaut, Big Planet Lunar Escape 2 Moon
DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN
 Ready 12th Symposium on Advance Space Technologies in Robotics and Automation, ESA / ESTEC, Noordwijk, The Nethelands DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN Shivesh Kumar, Raghavendra
Ready 12th Symposium on Advance Space Technologies in Robotics and Automation, ESA / ESTEC, Noordwijk, The Nethelands DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN Shivesh Kumar, Raghavendra
SOLERO: SOLAR-POWERED EXPLORATION ROVER
 SOLERO: SOLAR-POWERED EXPLORATION ROVER S.Michaud (1), A. Schneider (2), R.Bertrand (2), P.Lamon (1), R.Siegwart (1), M. Van Winnendael (3), A. Schiele (3) 1 Autonomous Systems Lab, Swiss Federal Institute
SOLERO: SOLAR-POWERED EXPLORATION ROVER S.Michaud (1), A. Schneider (2), R.Bertrand (2), P.Lamon (1), R.Siegwart (1), M. Van Winnendael (3), A. Schiele (3) 1 Autonomous Systems Lab, Swiss Federal Institute
System Level Design Review
 System Level Design Review HABIP High Altitude Balloon Instrumentation Platform P17104 & P17105 October 6, 2016 Team Members Team Communications Data Acquisition and Control Systems Team Member Major Team
System Level Design Review HABIP High Altitude Balloon Instrumentation Platform P17104 & P17105 October 6, 2016 Team Members Team Communications Data Acquisition and Control Systems Team Member Major Team
Table of Contents. Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.
 Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.") March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
PRELIMINARY DESIGN REVIEW
 PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
NASA Perspectives on the Importance of Reform in Electric Energy Systems Education
 NASA Perspectives on the Importance of Reform in Electric Energy Systems Education Reforming Electric Energy Systems Curriculum With Emphasis on Renewable/Storage, Smart Delivery, and Efficient End-Use
NASA Perspectives on the Importance of Reform in Electric Energy Systems Education Reforming Electric Energy Systems Curriculum With Emphasis on Renewable/Storage, Smart Delivery, and Efficient End-Use
Electric Penguin s philosophy:
 UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v 1.1 Penguin BE Electric Unmanned Platform Up to 110 minutes of endurance 2 with 2.8 kg payload 23 liters of payload volume Quick replaceable battery cartridge
UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v 1.1 Penguin BE Electric Unmanned Platform Up to 110 minutes of endurance 2 with 2.8 kg payload 23 liters of payload volume Quick replaceable battery cartridge