DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN
|
|
|
- Norman Webb
- 5 years ago
- Views:
Transcription
1 Ready

2 12th Symposium on Advance Space Technologies in Robotics and Automation, ESA / ESTEC, Noordwijk, The Nethelands DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN Shivesh Kumar, Raghavendra S, Mihir R Bhagat, Gangadharan K V, Department of Mechanical Engineering NATIONAL INSTITUTE OF TECHNOLOGY KARNATAKA Surathkal, INDIA
3 CONTENT Introduction - Shrimp - RecurDyn Work in RecurDyn - Modeling of Shrimp - Dynamic simulation on various terrain profiles Shrimp: Manufacturing Experimental Validation Results & Discussions Conclusions
4 INTRODUCTION Rovers: Most suitable for planetary exploration Over 300 design concepts developed already Shifting trends: Long-term, reusable rovers Rover deliverables increase: Long range Greater mobility Low power consumption High modularity Ease of control Fewer solo-missions. Regular inclusion of a greater bigger objective.

5 SHRIMP ROVER Innovative 6 wheeled rover Design at the Swiss Federal Institute of Technology (EPFL), Lausanne Design objective: Long-range mission for Martian exploration Image: EPFL Fully functional prototype was demonstrated at ESTEC (2000)

6 SHRIMP ROVER: KEY FEATURES 6 motorized wheels 2 parallel bogies, front and rear forks Passive control Excellent mobility: - Obstacle climbing - 2 x wheel dia. - Topple resistance - Upto 40 degrees - Pure steering possible (a) Image: EPFL


7 RECURDYN Multi-body dynamics software Advantages over other softwares: - No more excessive simplification - High solving efficiency - Good solving stability Equations of motion theory in recursive formation A product of High precision, fast solving.

8 MODELING OF SHRIMP Initial design based on SHRIMP III by BlueBotics ( Design made in CATIA V5 Imported to RecurDyn and joints defined Type of Joint Between body and wheels No. of Joints Type of Actuation 6 Active In front fork Passive, 1 Active Revolute joints In rear fork 1 Active In right parallel bogie In left parallel bogie 6 Passive 6 Passive Other parameters defined as well: Wheel speed: 30 rpm Friction: μstatic = 0.5 μdynamic = 0.3 Tire and road surface properties: Spring coeff. = 1000 N.mm Damping coeff. = 1 Damping friction coefficient = 0.9
9 DYNAMIC SIMULATION Kinematic and Dynamic simulation done using the multi-body dynamics solver of RecurDyn Simulation time and time steps chosen suitably The rover capabilities are tested on 3 types of terrains: - Ability to climb steps - Ability to climb a inclined surface - Ability to adapt passively with concave/convex terrains


10 CLIMBING STEPS Obstacle: Step Step size: 200 mm Under review: Torque requirements of the wheels




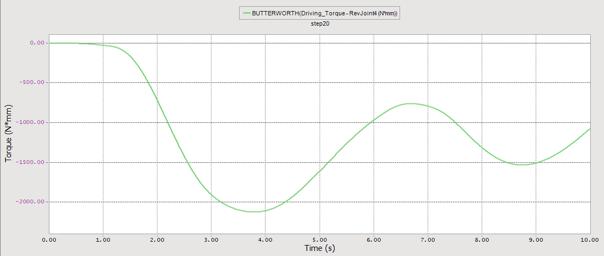
11 CLIMBING STEPS FRONT WHEEL REAR WHEEL

12 CLIMBING INCLINATION Obstacle: Slope Slope inclination: 40 degree Under review: Torque requirements of the wheels





13 CLIMBING INCLINATION FRONT WHEEL REAR WHEEL

14 CURVED SURFACE ADAPTABILITY Shrimp makes use of a passive suspension system Its is tested to check its adaptability to curved surfaces. Ex.: Concave
15 TORQUE ANALYSIS Wheel-Bogie Joint Position Max Torque (Kg-cm) Front Fork 32.1 Right Front 7.5 Right Rear 7.4 Left Front 7.0 Left Rear 6.8 Rear Fork 16.3 Maximum torque required is close to 32.1 kg-cm Factor of Safety: 1.25 Hence, Torque requirement becomes 40.1 kg-cm Available option: 45 kg-cm motors.
16 SHRIMP: MANUFACTURING Major Parts - Main body - Parallel bogies - Front & Rear fork - Electronics sub-system Built in-house at NITK Undergraduate project: Resources and facilities greatly constrained.

17 MAIN BODY Twin Alumnium pentagons form the base Supporting aluminium blocks: - To join the two plates - Support the load - Mounting point for revolute joints Bearings used for revolute joints Similar setup for the front fork

18 PARALLEL BOGIE Aluminium bogies mounted on either side of the rover Frames of C-section links that form a couple Mounted on freely rotating central pivot NOTE: Left and right bogie should be greatly identical to avoid mismatch in travel

19 FRONT & REAR FORKS Wheel mounted at the forks Front fork is similar to a 4 bar mechanism; wheel made to travel upward when it encounters obstacle Steering is achieved using servos whose axis is perpendicular to the ground and the axis of wheels
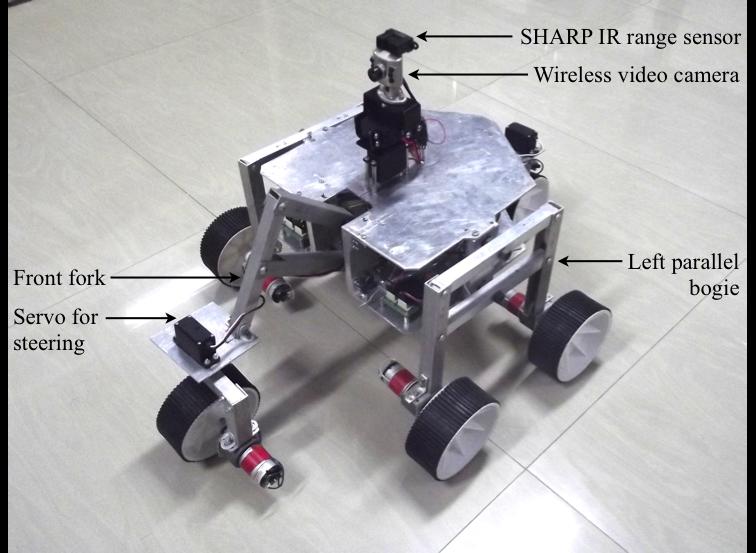
20 ELECTRONICS Key Features 2 parts: Base station & On-board control system Completely wireless control and data transmission using Xbee module Wireless video feed 2 ATMEGA16 processors in master slave configuration Light and portable LiPo battery along with battery protection circuit Interactive GUI using Matlab USB TV Tuner A/V feed RF Receiver Rover Control Commands User Sensor Data Live Video feed MATLAB based GUI Intel Core 2 Duo Processor (2.4 GHz) based PC FTDI based USB - UART bridge Wireless Xbee Module (Transmitter) Wireless Xbee Module (Receiver) Master Controller Atmega 16 based developer board (AVRiboard2.0) 3 units of: 8-28 V, 5A dual DC motor drivers with current sensing Right Bogie RF Transmitter Left Bogie Front & Rear Fork Front & Rear Fork s Servo for Steering BASE STATION Slave Controller AVRiboard 2.0 Servo Pod 2 servos SHARP IR Range Sensor Wireless Video Camera ON-BOARD CONTROL SYSTEM
21
22 EXPERIMENTAL VALIDATION Process Make the rover traverse obstacle paths to prove capabilities Measure armature current drawn by the motors and thus, estimate the driving torque requirements Obstacles Step Test: 8cm height Slope Test: 30 degree inclination Compare Driving Torque v/s Time graphs with those of RecurDyn

23 MEASURING THE TORQUE How to calculate torque? τ = Kt I


24 THE EXPERIMENTS
25 VALIDATION RESULTS Step Test Front Wheel Mean Absolute Percentage Error (MAPE) = 35.62% Slope Test Rear Wheel Mean Absolute Percentage Error (MAPE) = 42.87%
26 JUSTIFICATION FOR ERRORS MAPE typically varied between % for all cases. Effects of electrical DC drive model not included in our simulation. Non-linearities like BEMF voltage, friction between bearings, etc affect the system Incorrect data / estimation used in modeling: friction in revolute joints, contact friction, etc Mismatch between modeled and actual mass-inertia properties Simplified model: Nuts, bolts, clamps, etc not modeled
27 CONCLUSIONS Modeling & dynamic simulation of Shrimp through RecurDyn Virtual testing of rover on different terrains RecurDyn helped in selecting actuators for given payload requirements Experimental validation gave satisfactory results RecurDyn can be further exploited by better handling of problem at hand
28 ACKNOWLEDGEMENTS Mr. B Sridhar, Director of Function Dynamics India Pvt. Ltd. for issuing provisional licenses of RecurDyn for our project. NITK Alumni Association for providing a soft loan to attend this conference.
29 THANK YOU! Please contact:
Chassis Concepts for the ExoMars Rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Chassis Concepts for the ExoMars Rover
An Innovative Space Rover with Extended Climbing Abilities T. Estier 1, Y. Crausaz 1, B. Merminod 1, M. Lauria 1, R. Piguet 1, R.
 An Innovative Space Rover with Extended Climbing Abilities T. Estier 1, Y. Crausaz 1, B. Merminod 1, M. Lauria 1, R. Piguet 1, R. Siegwart 1 Abstract Autonomous mobile robots have become a key technology
An Innovative Space Rover with Extended Climbing Abilities T. Estier 1, Y. Crausaz 1, B. Merminod 1, M. Lauria 1, R. Piguet 1, R. Siegwart 1 Abstract Autonomous mobile robots have become a key technology
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity
 The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
ParcelBot A Tracked Parcel Transporter with High Obstacle Negotiation Capabilities
 Research Collection Conference Paper ParcelBot A Tracked Parcel Transporter with High Obstacle Negotiation Capabilities Author(s): Hoepflinger, Mark H.; Baschung, David; Remy, C. D.; Hutter, Marco; Siegwart,
Research Collection Conference Paper ParcelBot A Tracked Parcel Transporter with High Obstacle Negotiation Capabilities Author(s): Hoepflinger, Mark H.; Baschung, David; Remy, C. D.; Hutter, Marco; Siegwart,
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science
 Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Case Studies on NASA Mars Rover s Mobility System
 Case Studies on NASA Mars Rover s Mobility System Shih-Liang (Sid) Wang 1 Abstract Motion simulation files based on Working Model 2D TM are developed to simulate Mars rover s mobility system. The rover's
Case Studies on NASA Mars Rover s Mobility System Shih-Liang (Sid) Wang 1 Abstract Motion simulation files based on Working Model 2D TM are developed to simulate Mars rover s mobility system. The rover's
Performance Evaluation of Wheeled Rover by Analysis and Test
 Performance Evaluation of Wheeled Rover by Analysis and Test Gaurav Sharma, Srividhya G., Shamrao, K. Balaji, G. Nagesh, C.D. Sridhara Abstract Rovers provide a mobile platform for exploring planetary
Performance Evaluation of Wheeled Rover by Analysis and Test Gaurav Sharma, Srividhya G., Shamrao, K. Balaji, G. Nagesh, C.D. Sridhara Abstract Rovers provide a mobile platform for exploring planetary
Innovative Mars exploration rover using inflatable or unfolding wheels
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics.
 Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics. http://dx.doi.org/10.3991/ijoe.v11i6.5033 Matthew Bastin* and R Peter
Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics. http://dx.doi.org/10.3991/ijoe.v11i6.5033 Matthew Bastin* and R Peter
Coriolis Density Error Compensating for Ambient Temperature Effects
 Coriolis Density Error Compensating for Ambient Temperature Effects Presented by Gordon Lindsay Oil & Gas Focus Group December 2018 Contents Project aims and objectives Experiment Setup Phase 1 Exploratory
Coriolis Density Error Compensating for Ambient Temperature Effects Presented by Gordon Lindsay Oil & Gas Focus Group December 2018 Contents Project aims and objectives Experiment Setup Phase 1 Exploratory
Optimization of Seat Displacement and Settling Time of Quarter Car Model Vehicle Dynamic System Subjected to Speed Bump
 Research Article International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347-5161 2014 INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Optimization
Research Article International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347-5161 2014 INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Optimization
Wheeled Mobile Robots
 Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Modeling and Optimization of a Linear Electromagnetic Piston Pump
 Fluid Power Innovation & Research Conference Minneapolis, MN October 10 12, 2016 ing and Optimization of a Linear Electromagnetic Piston Pump Paul Hogan, MS Student Mechanical Engineering, University of
Fluid Power Innovation & Research Conference Minneapolis, MN October 10 12, 2016 ing and Optimization of a Linear Electromagnetic Piston Pump Paul Hogan, MS Student Mechanical Engineering, University of
WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE
 WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE Ilkka Leppänen, Sami Salmi and Aarne Halme Automation Technology Laboratory Helsinki University of Technology PL 3000, 02015 HUT, Finland E-mail
WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE Ilkka Leppänen, Sami Salmi and Aarne Halme Automation Technology Laboratory Helsinki University of Technology PL 3000, 02015 HUT, Finland E-mail
Universal Fluid Power Trainer (UFPT)
") Universal Fluid Power Trainer (UFPT) The UFPT is a modular, smart and unique fluid power and motion control training unit. It contains an excellent integration of industrial-graded hardware and builtin
Universal Fluid Power Trainer (UFPT) The UFPT is a modular, smart and unique fluid power and motion control training unit. It contains an excellent integration of industrial-graded hardware and builtin
Experimental Investigation of Effects of Shock Absorber Mounting Angle on Damping Characterstics
 Experimental Investigation of Effects of Shock Absorber Mounting Angle on Damping Characterstics Tanmay P. Dobhada Tushar S. Dhaspatil Prof. S S Hirmukhe Mauli P. Khapale Abstract: A shock absorber is
Experimental Investigation of Effects of Shock Absorber Mounting Angle on Damping Characterstics Tanmay P. Dobhada Tushar S. Dhaspatil Prof. S S Hirmukhe Mauli P. Khapale Abstract: A shock absorber is
Modeling and Optimization of a Linear Electromagnetic Piston Pump
 Fluid Power Innovation & Research Conference Minneapolis, MN October 10 12, 2016 ing and Optimization of a Linear Electromagnetic Piston Pump Paul Hogan, MS Student Mechanical Engineering, University of
Fluid Power Innovation & Research Conference Minneapolis, MN October 10 12, 2016 ing and Optimization of a Linear Electromagnetic Piston Pump Paul Hogan, MS Student Mechanical Engineering, University of
The Application of Simulink for Vibration Simulation of Suspension Dual-mass System
 Sensors & Transducers 204 by IFSA Publishing, S. L. http://www.sensorsportal.com The Application of Simulink for Vibration Simulation of Suspension Dual-mass System Gao Fei, 2 Qu Xiao Fei, 2 Zheng Pei
Sensors & Transducers 204 by IFSA Publishing, S. L. http://www.sensorsportal.com The Application of Simulink for Vibration Simulation of Suspension Dual-mass System Gao Fei, 2 Qu Xiao Fei, 2 Zheng Pei
Enhancing Wheelchair Mobility Through Dynamics Mimicking
 Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
A New Device to Measure Instantaneous Swept Volume of Reciprocating Machines/Compressors
 Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 2004 A New Device to Measure Instantaneous Swept Volume of Reciprocating Machines/Compressors
Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 2004 A New Device to Measure Instantaneous Swept Volume of Reciprocating Machines/Compressors
KINEMATICAL SUSPENSION OPTIMIZATION USING DESIGN OF EXPERIMENT METHOD
 Jurnal Mekanikal June 2014, No 37, 16-25 KINEMATICAL SUSPENSION OPTIMIZATION USING DESIGN OF EXPERIMENT METHOD Mohd Awaluddin A Rahman and Afandi Dzakaria Faculty of Mechanical Engineering, Universiti
Jurnal Mekanikal June 2014, No 37, 16-25 KINEMATICAL SUSPENSION OPTIMIZATION USING DESIGN OF EXPERIMENT METHOD Mohd Awaluddin A Rahman and Afandi Dzakaria Faculty of Mechanical Engineering, Universiti
Comparison - TE 80 and PCS HFFR
 Comparison - TE 80 and PCS HFFR For ISO 12156-1 and ASTM D6079 fuel lubricity standard tests, results from the TE 80 differ to those from the PCS HFRR. The TE 80 (and the TE 77 with low load adapter) consistently
Comparison - TE 80 and PCS HFFR For ISO 12156-1 and ASTM D6079 fuel lubricity standard tests, results from the TE 80 differ to those from the PCS HFRR. The TE 80 (and the TE 77 with low load adapter) consistently
The Design of an Omnidirectional All-Terrain Rover Chassis
 The Design of an Omnidirectional All-Terrain Rover Chassis Abstract Submission for TePRA 2011: the 3rd Annual IEEE International Conference on Technologies for Practical Robot Applications Timothy C. Lexen,
The Design of an Omnidirectional All-Terrain Rover Chassis Abstract Submission for TePRA 2011: the 3rd Annual IEEE International Conference on Technologies for Practical Robot Applications Timothy C. Lexen,
Researches regarding a pressure pulse generator as a segment of model for a weighing in motion system
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Researches regarding a pressure pulse generator as a segment of model for a weighing in motion system To cite this article: I
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Researches regarding a pressure pulse generator as a segment of model for a weighing in motion system To cite this article: I
CHAPTER THREE DC MOTOR OVERVIEW AND MATHEMATICAL MODEL
 CHAPTER THREE DC MOTOR OVERVIEW AND MATHEMATICAL MODEL 3.1 Introduction Almost every mechanical movement that we see around us is accomplished by an electric motor. Electric machines are a means of converting
CHAPTER THREE DC MOTOR OVERVIEW AND MATHEMATICAL MODEL 3.1 Introduction Almost every mechanical movement that we see around us is accomplished by an electric motor. Electric machines are a means of converting
MODELS FOR THE DYNAMIC ANALYSIS OF THE SUSPENSION SYSTEM OF THE VEHICLES REAR AXLE
 MODELS FOR THE DYNAMIC ANALYSIS OF THE SUSPENSION SYSTEM OF THE VEHICLES REAR AXLE Alexandru Cătălin Transilvania University of Braşov, Product Design and Robotics Department, calex@unitbv.ro Keywords:
MODELS FOR THE DYNAMIC ANALYSIS OF THE SUSPENSION SYSTEM OF THE VEHICLES REAR AXLE Alexandru Cătălin Transilvania University of Braşov, Product Design and Robotics Department, calex@unitbv.ro Keywords:
RIMRES: A project summary
 RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
Simulation and Analysis of Vehicle Suspension System for Different Road Profile
 Simulation and Analysis of Vehicle Suspension System for Different Road Profile P.Senthil kumar 1 K.Sivakumar 2 R.Kalidas 3 1 Assistant professor, 2 Professor & Head, 3 Student Department of Mechanical
Simulation and Analysis of Vehicle Suspension System for Different Road Profile P.Senthil kumar 1 K.Sivakumar 2 R.Kalidas 3 1 Assistant professor, 2 Professor & Head, 3 Student Department of Mechanical
Variable Stiffness Actuators : A General Review
 Variable Stiffness Actuators : A General Review Mr. S. A. Lavate Dept. of Mechanical Engineering Annasaheb Dange College of Engg. and Technology, Ashta- India Dr. R. G. Todkar Dept. of Mechanical Engineering
Variable Stiffness Actuators : A General Review Mr. S. A. Lavate Dept. of Mechanical Engineering Annasaheb Dange College of Engg. and Technology, Ashta- India Dr. R. G. Todkar Dept. of Mechanical Engineering
Semi-Active Suspension for an Automobile
 Semi-Active Suspension for an Automobile Pavan Kumar.G 1 Mechanical Engineering PESIT Bangalore, India M. Sambasiva Rao 2 Mechanical Engineering PESIT Bangalore, India Abstract Handling characteristics
Semi-Active Suspension for an Automobile Pavan Kumar.G 1 Mechanical Engineering PESIT Bangalore, India M. Sambasiva Rao 2 Mechanical Engineering PESIT Bangalore, India Abstract Handling characteristics
European Lunar Lander: System Engineering Approach
 human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
REU: Improving Straight Line Travel in a Miniature Wheeled Robot
 THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
Vehicle Dynamic Simulation Using A Non-Linear Finite Element Simulation Program (LS-DYNA)
") Vehicle Dynamic Simulation Using A Non-Linear Finite Element Simulation Program (LS-DYNA) G. S. Choi and H. K. Min Kia Motors Technical Center 3-61 INTRODUCTION The reason manufacturers invest their time
Vehicle Dynamic Simulation Using A Non-Linear Finite Element Simulation Program (LS-DYNA) G. S. Choi and H. K. Min Kia Motors Technical Center 3-61 INTRODUCTION The reason manufacturers invest their time
Universal Fluid Power Trainer (UFPT)
") Universal Fluid Power Trainer (UFPT) Milwaukee School of Engineering Applied Technology Center TM Department of Professional Education The UFPT is a modular, smart and unique fluid power and motion control
Universal Fluid Power Trainer (UFPT) Milwaukee School of Engineering Applied Technology Center TM Department of Professional Education The UFPT is a modular, smart and unique fluid power and motion control
MORSE: MOdel-based Real-time Systems Engineering. Reducing physical testing in the calibration of diagnostic and driveabilty features
 MORSE: MOdel-based Real-time Systems Engineering Reducing physical testing in the calibration of diagnostic and driveabilty features Mike Dempsey Claytex Future Powertrain Conference 2017 MORSE project
MORSE: MOdel-based Real-time Systems Engineering Reducing physical testing in the calibration of diagnostic and driveabilty features Mike Dempsey Claytex Future Powertrain Conference 2017 MORSE project
Segway with Human Control and Wireless Control
 Review Paper Abstract Research Journal of Engineering Sciences E- ISSN 2278 9472 Segway with Human Control and Wireless Control Sanjay Kumar* and Manisha Sharma and Sourabh Yadav Dept. of Electronics &
Review Paper Abstract Research Journal of Engineering Sciences E- ISSN 2278 9472 Segway with Human Control and Wireless Control Sanjay Kumar* and Manisha Sharma and Sourabh Yadav Dept. of Electronics &
Magnetorheological suspension damper for space application
 Magnetorheological suspension damper for space application Ing. Michal Kubík Supervisors Doc. Ing. Ivan Mazůrek, CSc. Ing. Jakub Roupec, Ph.D. Institute of Machine and Industrial Design Faculty of Mechanical
Magnetorheological suspension damper for space application Ing. Michal Kubík Supervisors Doc. Ing. Ivan Mazůrek, CSc. Ing. Jakub Roupec, Ph.D. Institute of Machine and Industrial Design Faculty of Mechanical
Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers
 Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers Kojiro Iizuka and Takashi Kubota 2 International Young Researchers Empowerment Center, Shinshu University, iizuka@shinshu-u.ac.jp 2
Study on Effect of Grousers Mounted Flexible Wheel for Mobile Rovers Kojiro Iizuka and Takashi Kubota 2 International Young Researchers Empowerment Center, Shinshu University, iizuka@shinshu-u.ac.jp 2
ISSN: SIMULATION AND ANALYSIS OF PASSIVE SUSPENSION SYSTEM FOR DIFFERENT ROAD PROFILES WITH VARIABLE DAMPING AND STIFFNESS PARAMETERS S.
 Journal of Chemical and Pharmaceutical Sciences www.jchps.com ISSN: 974-2115 SIMULATION AND ANALYSIS OF PASSIVE SUSPENSION SYSTEM FOR DIFFERENT ROAD PROFILES WITH VARIABLE DAMPING AND STIFFNESS PARAMETERS
Journal of Chemical and Pharmaceutical Sciences www.jchps.com ISSN: 974-2115 SIMULATION AND ANALYSIS OF PASSIVE SUSPENSION SYSTEM FOR DIFFERENT ROAD PROFILES WITH VARIABLE DAMPING AND STIFFNESS PARAMETERS
Appendix A: Motion Control Theory
 Appendix A: Motion Control Theory Objectives The objectives for this appendix are as follows: Learn about valve step response. Show examples and terminology related to valve and system damping. Gain an
Appendix A: Motion Control Theory Objectives The objectives for this appendix are as follows: Learn about valve step response. Show examples and terminology related to valve and system damping. Gain an
ALS (Active Lateral Suspension) By Bernard GAUTIER SNCF
 By Bernard GAUTIER SNCF") ALS (Active Lateral Suspension) By Bernard GAUTIER SNCF The vertical and lateral motions of a railway vehicle come from the track and the wheel - rail contact dynamics. The motions of the vehicle determinate
ALS (Active Lateral Suspension) By Bernard GAUTIER SNCF The vertical and lateral motions of a railway vehicle come from the track and the wheel - rail contact dynamics. The motions of the vehicle determinate
DESIGN AND ANALYSIS OF PUSH ROD ROCKER ARM SUSPENSION USING MONO SPRING
 Volume 114 No. 9 2017, 465-475 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu DESIGN AND ANALYSIS OF PUSH ROD ROCKER ARM SUSPENSION USING MONO SPRING
Volume 114 No. 9 2017, 465-475 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu DESIGN AND ANALYSIS OF PUSH ROD ROCKER ARM SUSPENSION USING MONO SPRING
Modeling and Simulation of a Mobile Robot for Polar Environments
 Modeling and Simulation of a Mobile Robot for Polar Environments Thesis Presented by Eric Akers October 20, 2003 Committee Chair Professor Agah Committee Member Professor Minden Committee Member Professor
Modeling and Simulation of a Mobile Robot for Polar Environments Thesis Presented by Eric Akers October 20, 2003 Committee Chair Professor Agah Committee Member Professor Minden Committee Member Professor
STEALTH INTERNATIONAL INC. DESIGN REPORT #1001 IBC ENERGY DISSIPATING VALVE FLOW TESTING OF 12 VALVE
 STEALTH INTERNATIONAL INC. DESIGN REPORT #1001 IBC ENERGY DISSIPATING VALVE FLOW TESTING OF 12 VALVE 2 This report will discuss the results obtained from flow testing of a 12 IBC valve at Alden Research
STEALTH INTERNATIONAL INC. DESIGN REPORT #1001 IBC ENERGY DISSIPATING VALVE FLOW TESTING OF 12 VALVE 2 This report will discuss the results obtained from flow testing of a 12 IBC valve at Alden Research
Relevant friction effects on walking machines
 Relevant friction effects on walking machines Elena Garcia and Pablo Gonzalez-de-Santos Industrial Automation Institute (CSIC) 28500 Madrid, Spain email: egarcia@iai.csic.es Key words: Legged robots, friction
Relevant friction effects on walking machines Elena Garcia and Pablo Gonzalez-de-Santos Industrial Automation Institute (CSIC) 28500 Madrid, Spain email: egarcia@iai.csic.es Key words: Legged robots, friction
SUSPENSION OF A MOUNTAIN BIKE SVOČ FST Bc. Vít Prošek University of West Bohemia Univerzitni 8, Pilsen Czech Republic
 SUSPENSION OF A MOUNTAIN BIKE SVOČ FST 211 Bc. Vít Prošek University of West Bohemia Univerzitni 8, 36 14 Pilsen Czech Republic ABSTRACT This work is concerned about suspended mountain bikes, especially
SUSPENSION OF A MOUNTAIN BIKE SVOČ FST 211 Bc. Vít Prošek University of West Bohemia Univerzitni 8, 36 14 Pilsen Czech Republic ABSTRACT This work is concerned about suspended mountain bikes, especially
Application Information
 Moog Components Group manufactures a comprehensive line of brush-type and brushless motors, as well as brushless controllers. The purpose of this document is to provide a guide for the selection and application
Moog Components Group manufactures a comprehensive line of brush-type and brushless motors, as well as brushless controllers. The purpose of this document is to provide a guide for the selection and application
Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil
 Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil By Brian Edwards, Vehicle Dynamics Group, Pratt and Miller Engineering, USA 22 Engineering Reality Magazine Multibody Dynamics
Adams-EDEM Co-simulation for Predicting Military Vehicle Mobility on Soft Soil By Brian Edwards, Vehicle Dynamics Group, Pratt and Miller Engineering, USA 22 Engineering Reality Magazine Multibody Dynamics
Canadian Lunar & Planetary Rover. Development
 Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
TRANSMISSION COMPUTATIONAL MODEL IN SIMULINK
 TRANSMISSION COMPUTATIONAL MODEL IN SIMULINK Pavel Kučera 1, Václav Píštěk 2 Summary: The article describes the creation of a transmission and a clutch computational model. These parts of the powertrain
TRANSMISSION COMPUTATIONAL MODEL IN SIMULINK Pavel Kučera 1, Václav Píštěk 2 Summary: The article describes the creation of a transmission and a clutch computational model. These parts of the powertrain
Active Suspensions For Tracked Vehicles
 Active Suspensions For Tracked Vehicles Y.G.Srinivasa, P. V. Manivannan 1, Rajesh K 2 and Sanjay goyal 2 Precision Engineering and Instrumentation Lab Indian Institute of Technology Madras Chennai 1 PEIL
Active Suspensions For Tracked Vehicles Y.G.Srinivasa, P. V. Manivannan 1, Rajesh K 2 and Sanjay goyal 2 Precision Engineering and Instrumentation Lab Indian Institute of Technology Madras Chennai 1 PEIL
Design & Development of Regenerative Braking System at Rear Axle
 International Journal of Advanced Mechanical Engineering. ISSN 2250-3234 Volume 8, Number 2 (2018), pp. 165-172 Research India Publications http://www.ripublication.com Design & Development of Regenerative
International Journal of Advanced Mechanical Engineering. ISSN 2250-3234 Volume 8, Number 2 (2018), pp. 165-172 Research India Publications http://www.ripublication.com Design & Development of Regenerative
Boombot: Low Friction Coefficient Stair Climbing Robot Using Rotating Boom and Weight Redistribution
 Boombot: Low Friction Coefficient Stair Climbing Robot Using Rotating Boom and Weight Redistribution Sartaj Singh and Ramachandra K Abstract Boombot comprising four wheels and a rotating boom in the middle
Boombot: Low Friction Coefficient Stair Climbing Robot Using Rotating Boom and Weight Redistribution Sartaj Singh and Ramachandra K Abstract Boombot comprising four wheels and a rotating boom in the middle
International Journal of Advance Engineering and Research Development
 Scientific Journal of Impact Factor (SJIF): 5.71 e-issn (O): 2348-4470 p-issn (P): 2348-6406 International Journal of Advance Engineering and Research Development Volume 5, Issue 05, May -2018 SPEED SYNCHRONIZATION
Scientific Journal of Impact Factor (SJIF): 5.71 e-issn (O): 2348-4470 p-issn (P): 2348-6406 International Journal of Advance Engineering and Research Development Volume 5, Issue 05, May -2018 SPEED SYNCHRONIZATION
Identification of tyre lateral force characteristic from handling data and functional suspension model
 Identification of tyre lateral force characteristic from handling data and functional suspension model Marco Pesce, Isabella Camuffo Centro Ricerche Fiat Vehicle Dynamics & Fuel Economy Christian Girardin
Identification of tyre lateral force characteristic from handling data and functional suspension model Marco Pesce, Isabella Camuffo Centro Ricerche Fiat Vehicle Dynamics & Fuel Economy Christian Girardin
Linear Actuator with Ball Screw Series OSP-E..S. Contents Description Overview Technical Data Dimensions 79
 Linear Actuator with Ball Screw Series OSP-E..S Contents Description Page Overview 71-74 Technical Data 75-78 Dimensions 79 71 The System Concept ELECTRIC LINEAR ACTUATOR FOR HIGH ACCURACY APPLICATIONS
Linear Actuator with Ball Screw Series OSP-E..S Contents Description Page Overview 71-74 Technical Data 75-78 Dimensions 79 71 The System Concept ELECTRIC LINEAR ACTUATOR FOR HIGH ACCURACY APPLICATIONS
Linear Flexible Joint Cart Plus Single Inverted Pendulum (LFJC+SIP)
") Linear Motion Servo Plants: IP01 and IP02 Linear Flexible Joint Cart Plus Single Inverted Pendulum (LFJC+SIP) User Manual Table of Contents 1. Linear Flexible Joint Cart Plus Single Inverted Pendulum System
Linear Motion Servo Plants: IP01 and IP02 Linear Flexible Joint Cart Plus Single Inverted Pendulum (LFJC+SIP) User Manual Table of Contents 1. Linear Flexible Joint Cart Plus Single Inverted Pendulum System
Digital Shaping and Optimization of Fuel Injection Pattern for a Common Rail Automotive Diesel Engine through Numerical Simulation
 Digital Shaping and Optimization of Fuel Injection Pattern for a Common Rail Automotive Diesel Engine through Numerical Simulation European GT Conference 2017 - Frankfurt am Main Politecnico di Torino:
Digital Shaping and Optimization of Fuel Injection Pattern for a Common Rail Automotive Diesel Engine through Numerical Simulation European GT Conference 2017 - Frankfurt am Main Politecnico di Torino:
International Conference on Mechanics, Materials and Structural Engineering (ICMMSE 2016)
") International Conference on Mechanics, Materials and Structural Engineering (ICMMSE 2016) Comparison on Hysteresis Movement in Accordance with the Frictional Coefficient and Initial Angle of Clutch Diaphragm
International Conference on Mechanics, Materials and Structural Engineering (ICMMSE 2016) Comparison on Hysteresis Movement in Accordance with the Frictional Coefficient and Initial Angle of Clutch Diaphragm
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
Environmental Envelope Control
 Environmental Envelope Control May 26 th, 2014 Stanford University Mechanical Engineering Dept. Dynamic Design Lab Stephen Erlien Avinash Balachandran J. Christian Gerdes Motivation New technologies are
Environmental Envelope Control May 26 th, 2014 Stanford University Mechanical Engineering Dept. Dynamic Design Lab Stephen Erlien Avinash Balachandran J. Christian Gerdes Motivation New technologies are
Reduction of Self Induced Vibration in Rotary Stirling Cycle Coolers
 Reduction of Self Induced Vibration in Rotary Stirling Cycle Coolers U. Bin-Nun FLIR Systems Inc. Boston, MA 01862 ABSTRACT Cryocooler self induced vibration is a major consideration in the design of IR
Reduction of Self Induced Vibration in Rotary Stirling Cycle Coolers U. Bin-Nun FLIR Systems Inc. Boston, MA 01862 ABSTRACT Cryocooler self induced vibration is a major consideration in the design of IR
Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints
 Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints Lan Yue Ji, Sebatian Bartsch, Frank Kirchner DFKI Bremen & Universität Bremen Robotics Innovations Center Director:
Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints Lan Yue Ji, Sebatian Bartsch, Frank Kirchner DFKI Bremen & Universität Bremen Robotics Innovations Center Director:
An Overview of CSA s s Space Robotics Activities
 An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
FEASIBILITY STYDY OF CHAIN DRIVE IN WATER HYDRAULIC ROTARY JOINT
 FEASIBILITY STYDY OF CHAIN DRIVE IN WATER HYDRAULIC ROTARY JOINT Antti MAKELA, Jouni MATTILA, Mikko SIUKO, Matti VILENIUS Institute of Hydraulics and Automation, Tampere University of Technology P.O.Box
FEASIBILITY STYDY OF CHAIN DRIVE IN WATER HYDRAULIC ROTARY JOINT Antti MAKELA, Jouni MATTILA, Mikko SIUKO, Matti VILENIUS Institute of Hydraulics and Automation, Tampere University of Technology P.O.Box
Step Motor. Mechatronics Device Report Yisheng Zhang 04/02/03. What Is A Step Motor?
 Step Motor What is a Step Motor? How Do They Work? Basic Types: Variable Reluctance, Permanent Magnet, Hybrid Where Are They Used? How Are They Controlled? How To Select A Step Motor and Driver Types of
Step Motor What is a Step Motor? How Do They Work? Basic Types: Variable Reluctance, Permanent Magnet, Hybrid Where Are They Used? How Are They Controlled? How To Select A Step Motor and Driver Types of
NEW DESIGN AND DEVELELOPMENT OF ESKIG MOTORCYCLE
 NEW DESIGN AND DEVELELOPMENT OF ESKIG MOTORCYCLE Eskinder Girma PG Student Department of Automobile Engineering, M.I.T Campus, Anna University, Chennai-44, India. Email: eskindergrm@gmail.com Mobile no:7299391869
NEW DESIGN AND DEVELELOPMENT OF ESKIG MOTORCYCLE Eskinder Girma PG Student Department of Automobile Engineering, M.I.T Campus, Anna University, Chennai-44, India. Email: eskindergrm@gmail.com Mobile no:7299391869
Structure Design and Performance Analysis for Locomotion System of the Field Exploration Robot
 Structure Design and Performance Analysis for Locomotion System of the Field Exploration Robot SHANG WEIYAN QIU FAJU YANG CHAOZHEN ZHENGSHUHUA Department of mechanical engineering Ningbo University of
Structure Design and Performance Analysis for Locomotion System of the Field Exploration Robot SHANG WEIYAN QIU FAJU YANG CHAOZHEN ZHENGSHUHUA Department of mechanical engineering Ningbo University of
Finite Element and Experimental Validation of Stiffness Analysis of Precision Feedback Spring and Flexure Tube of Jet Pipe Electrohydraulic Servovalve
 Finite Element and Experimental Validation of Stiffness Analysis of Precision Feedback Spring and Flexure Tube of Jet Pipe Electrohydraulic Servovalve M. Singaperumal*, Somashekhar. S. Hiremath* R. Krishna
Finite Element and Experimental Validation of Stiffness Analysis of Precision Feedback Spring and Flexure Tube of Jet Pipe Electrohydraulic Servovalve M. Singaperumal*, Somashekhar. S. Hiremath* R. Krishna
EMC-HD. C 01_2 Subheadline_15pt/7.2mm
 C Electromechanical 01_1 Headline_36pt/14.4mm Cylinder EMC-HD C 01_2 Subheadline_15pt/7.2mm 2 Elektromechanischer Zylinder EMC-HD Short product name Example: EMC 085 HD 1 System = ElectroMechanical Cylinder
C Electromechanical 01_1 Headline_36pt/14.4mm Cylinder EMC-HD C 01_2 Subheadline_15pt/7.2mm 2 Elektromechanischer Zylinder EMC-HD Short product name Example: EMC 085 HD 1 System = ElectroMechanical Cylinder
Estimation of Reliable Design Loads During Extreme Strength and Durability Events at Jaguar Land Rover. SIMPACK User Meeting May 2011
 Estimation of Reliable Design Loads During Extreme Strength and Durability Events at Jaguar Land Rover SIMPACK User Meeting May 2011 Dr. Stergio Lolas (BEng, PhD, AMIMechE) Research Consultant, Jaguar
Estimation of Reliable Design Loads During Extreme Strength and Durability Events at Jaguar Land Rover SIMPACK User Meeting May 2011 Dr. Stergio Lolas (BEng, PhD, AMIMechE) Research Consultant, Jaguar
Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection
 Journal of Asian Electric Vehicles, Volume 7, Number 2, December 2009 Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection Koiro
Journal of Asian Electric Vehicles, Volume 7, Number 2, December 2009 Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection Koiro
Thermal Analysis of Shell and Tube Heat Exchanger Using Different Fin Cross Section
 Thermal Analysis of Shell and Tube Heat Exchanger Using Different Fin Cross Section J. Heeraman M.Tech -Thermal Engineering Department of Mechanical Engineering Ellenki College of Engineering & Technology
Thermal Analysis of Shell and Tube Heat Exchanger Using Different Fin Cross Section J. Heeraman M.Tech -Thermal Engineering Department of Mechanical Engineering Ellenki College of Engineering & Technology
SOLERO: SOLAR-POWERED EXPLORATION ROVER
 SOLERO: SOLAR-POWERED EXPLORATION ROVER S.Michaud (1), A. Schneider (2), R.Bertrand (2), P.Lamon (1), R.Siegwart (1), M. Van Winnendael (3), A. Schiele (3) 1 Autonomous Systems Lab, Swiss Federal Institute
SOLERO: SOLAR-POWERED EXPLORATION ROVER S.Michaud (1), A. Schneider (2), R.Bertrand (2), P.Lamon (1), R.Siegwart (1), M. Van Winnendael (3), A. Schiele (3) 1 Autonomous Systems Lab, Swiss Federal Institute
ENERGY ANALYSIS OF A POWERTRAIN AND CHASSIS INTEGRATED SIMULATION ON A MILITARY DUTY CYCLE
 U.S. ARMY TANK AUTOMOTIVE RESEARCH, DEVELOPMENT AND ENGINEERING CENTER ENERGY ANALYSIS OF A POWERTRAIN AND CHASSIS INTEGRATED SIMULATION ON A MILITARY DUTY CYCLE GT Suite User s Conference: 9 November
U.S. ARMY TANK AUTOMOTIVE RESEARCH, DEVELOPMENT AND ENGINEERING CENTER ENERGY ANALYSIS OF A POWERTRAIN AND CHASSIS INTEGRATED SIMULATION ON A MILITARY DUTY CYCLE GT Suite User s Conference: 9 November
Social innovation and light electric vehicle revolution on streets and ambient
 Social innovation and light electric vehicle revolution on streets and ambient 25 th Apr. 2018 RESOLVE Final Event Chaussée de Wavre 950-1040 Bruxelles Riccardo Groppo Contents The SilverStream project
Social innovation and light electric vehicle revolution on streets and ambient 25 th Apr. 2018 RESOLVE Final Event Chaussée de Wavre 950-1040 Bruxelles Riccardo Groppo Contents The SilverStream project
Lifting Mechanisms. Example 1: Two Stage Lift
 Lifting Mechanisms The primary scoring method for the 2018 game is to deposit fuel cubes into scoring zones. A manipulator fixed to your robot can deliver fuel cubes into ground level scoring zones, but
Lifting Mechanisms The primary scoring method for the 2018 game is to deposit fuel cubes into scoring zones. A manipulator fixed to your robot can deliver fuel cubes into ground level scoring zones, but
PREDICTION OF PISTON SLAP OF IC ENGINE USING FEA BY VARYING GAS PRESSURE
 PREDICTION OF PISTON SLAP OF IC ENGINE USING FEA BY VARYING GAS PRESSURE V. S. Konnur Department of Mechanical Engineering, BLDEA s Engineering College, Bijapur, Karnataka, (India) ABSTRACT The automotive
PREDICTION OF PISTON SLAP OF IC ENGINE USING FEA BY VARYING GAS PRESSURE V. S. Konnur Department of Mechanical Engineering, BLDEA s Engineering College, Bijapur, Karnataka, (India) ABSTRACT The automotive
Astro the Rover. Olympus Mons Rover Team
 Astro the Rover Olympus Mons Rover Team 2014-2015 Purpose: Design a robotic vehicle capable of performing tasks for a sample return mission within the parameters and requirements of the University Rover
Astro the Rover Olympus Mons Rover Team 2014-2015 Purpose: Design a robotic vehicle capable of performing tasks for a sample return mission within the parameters and requirements of the University Rover
Wheeled Robotic Mobility. Dimi Apostolopoulos
 Wheeled Robotic Mobility Dimi Apostolopoulos Significance of Mobility Move Position Transport Employ instruments and tools React to work loads in a controllable fashion ROBOTIC MOBILITY Dimi Apostolopoulos
Wheeled Robotic Mobility Dimi Apostolopoulos Significance of Mobility Move Position Transport Employ instruments and tools React to work loads in a controllable fashion ROBOTIC MOBILITY Dimi Apostolopoulos
Design and Analysis of suspension system components
 Design and Analysis of suspension system components Manohar Gade 1, Rayees Shaikh 2, Deepak Bijamwar 3, Shubham Jambale 4, Vikram Kulkarni 5 1 Student, Department of Mechanical Engineering, D Y Patil college
Design and Analysis of suspension system components Manohar Gade 1, Rayees Shaikh 2, Deepak Bijamwar 3, Shubham Jambale 4, Vikram Kulkarni 5 1 Student, Department of Mechanical Engineering, D Y Patil college
Sim Pedals Sprint preview
 Sim Pedals Sprint preview In Q4 2018 Heusinkveld will release the Sim Pedals Sprint. This all new esports pedal set marks a major step forward in terms of mechanics, electronics and software. We listened
Sim Pedals Sprint preview In Q4 2018 Heusinkveld will release the Sim Pedals Sprint. This all new esports pedal set marks a major step forward in terms of mechanics, electronics and software. We listened
Chapter 2 Dynamic Analysis of a Heavy Vehicle Using Lumped Parameter Model
 Chapter 2 Dynamic Analysis of a Heavy Vehicle Using Lumped Parameter Model The interaction between a vehicle and the road is a very complicated dynamic process, which involves many fields such as vehicle
Chapter 2 Dynamic Analysis of a Heavy Vehicle Using Lumped Parameter Model The interaction between a vehicle and the road is a very complicated dynamic process, which involves many fields such as vehicle
Forced vibration frequency response for a permanent magnetic planetary gear
 Forced vibration frequency response for a permanent magnetic planetary gear Xuejun Zhu 1, Xiuhong Hao 2, Minggui Qu 3 1 Hebei Provincial Key Laboratory of Parallel Robot and Mechatronic System, Yanshan
Forced vibration frequency response for a permanent magnetic planetary gear Xuejun Zhu 1, Xiuhong Hao 2, Minggui Qu 3 1 Hebei Provincial Key Laboratory of Parallel Robot and Mechatronic System, Yanshan
EE 370L Controls Laboratory. Laboratory Exercise #E1 Motor Control
 1. Learning Objectives EE 370L Controls Laboratory Laboratory Exercise #E1 Motor Control Department of Electrical and Computer Engineering University of Nevada, at Las Vegas To demonstrate the concept
1. Learning Objectives EE 370L Controls Laboratory Laboratory Exercise #E1 Motor Control Department of Electrical and Computer Engineering University of Nevada, at Las Vegas To demonstrate the concept
Mathematical Modelling and Simulation Of Semi- Active Suspension System For An 8 8 Armoured Wheeled Vehicle With 11 DOF
 Mathematical Modelling and Simulation Of Semi- Active Suspension System For An 8 8 Armoured Wheeled Vehicle With 11 DOF Sujithkumar M Sc C, V V Jagirdar Sc D and MW Trikande Sc G VRDE, Ahmednagar Maharashtra-414006,
Mathematical Modelling and Simulation Of Semi- Active Suspension System For An 8 8 Armoured Wheeled Vehicle With 11 DOF Sujithkumar M Sc C, V V Jagirdar Sc D and MW Trikande Sc G VRDE, Ahmednagar Maharashtra-414006,
Comparison Of Multibody Dynamic Analysis Of Double Wishbone Suspension Using Simmechanics And FEA Approach
 International Journal of Research in Engineering and Science (IJRES) ISSN (Online): 232-9364, ISSN (Print): 232-9356 Volume 2 Issue 4 ǁ April. 214 ǁ PP.31-37 Comparison Of Multibody Dynamic Analysis Of
International Journal of Research in Engineering and Science (IJRES) ISSN (Online): 232-9364, ISSN (Print): 232-9356 Volume 2 Issue 4 ǁ April. 214 ǁ PP.31-37 Comparison Of Multibody Dynamic Analysis Of
Design Methodology of Steering System for All-Terrain Vehicles
 Design Methodology of Steering System for All-Terrain Vehicles Dr. V.K. Saini*, Prof. Sunil Kumar Amit Kumar Shakya #1, Harshit Mishra #2 *Head of Dep t of Mechanical Engineering, IMS Engineering College,
Design Methodology of Steering System for All-Terrain Vehicles Dr. V.K. Saini*, Prof. Sunil Kumar Amit Kumar Shakya #1, Harshit Mishra #2 *Head of Dep t of Mechanical Engineering, IMS Engineering College,
Electromagnetic Fully Flexible Valve Actuator
 Electromagnetic Fully Flexible Valve Actuator A traditional cam drive train, shown in Figure 1, acts on the valve stems to open and close the valves. As the crankshaft drives the camshaft through gears
Electromagnetic Fully Flexible Valve Actuator A traditional cam drive train, shown in Figure 1, acts on the valve stems to open and close the valves. As the crankshaft drives the camshaft through gears
Investigation of Radiators Size, Orientation of Sub Cooled Section and Fan Position on Twin Fan Cooling Packby 1D Simulation
 Investigation of Radiators Size, Orientation of Sub Cooled Section and Fan Position on Twin Fan Cooling Packby 1D Simulation Neelakandan K¹, Goutham Sagar M², Ajay Virmalwar³ Abstract: A study plan to
Investigation of Radiators Size, Orientation of Sub Cooled Section and Fan Position on Twin Fan Cooling Packby 1D Simulation Neelakandan K¹, Goutham Sagar M², Ajay Virmalwar³ Abstract: A study plan to
Modeling and Simulate Automotive Powertrain Systems
 Modeling and Simulate Automotive Powertrain Systems Maurizio Dalbard 2015 The MathWorks, Inc. 1 Model-Based Design Challenges It s hard to do good Model-Based Design without good models Insufficient expertise
Modeling and Simulate Automotive Powertrain Systems Maurizio Dalbard 2015 The MathWorks, Inc. 1 Model-Based Design Challenges It s hard to do good Model-Based Design without good models Insufficient expertise
SPMM OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000?
 SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
SURVEYOR-H. Technical Data. Max speed 120 km/h. Engine power 7.2 hp. Powerplant Modified Zenoah G29E. Fuel tank volume 3.6 l
 rev. 28.10.14 * features & specifications are subject to change without notice. Technical Data Max speed 120 km/h Engine power 7.2 hp Powerplant Modified Zenoah G29E Fuel tank volume 3.6 l Payload with
rev. 28.10.14 * features & specifications are subject to change without notice. Technical Data Max speed 120 km/h Engine power 7.2 hp Powerplant Modified Zenoah G29E Fuel tank volume 3.6 l Payload with
STUDYING THE POSSIBILITY OF INCREASING THE FLIGHT AUTONOMY OF A ROTARY-WING MUAV
 SCIENTIFIC RESEARCH AND EDUCATION IN THE AIR FORCE AFASES2017 STUDYING THE POSSIBILITY OF INCREASING THE FLIGHT AUTONOMY OF A ROTARY-WING MUAV Cristian VIDAN *, Daniel MĂRĂCINE ** * Military Technical
SCIENTIFIC RESEARCH AND EDUCATION IN THE AIR FORCE AFASES2017 STUDYING THE POSSIBILITY OF INCREASING THE FLIGHT AUTONOMY OF A ROTARY-WING MUAV Cristian VIDAN *, Daniel MĂRĂCINE ** * Military Technical
Vibration Analysis of an All-Terrain Vehicle
 Vibration Analysis of an All-Terrain Vehicle Neeraj Patel, Tarun Gupta B.Tech, Department of Mechanical Engineering, Maulana Azad National Institute of Technology, Bhopal, India. Abstract - Good NVH is
Vibration Analysis of an All-Terrain Vehicle Neeraj Patel, Tarun Gupta B.Tech, Department of Mechanical Engineering, Maulana Azad National Institute of Technology, Bhopal, India. Abstract - Good NVH is
BMVSS Knee a low-cost passive prosthesis to replicate able-bodied motion
 BMVSS Knee a low-cost passive prosthesis to replicate able-bodied motion Molly Berringer, Paige Boehmcke, Jason Fischman, Athena Huang, Danny Joh, Cali Warner Mentor: Murthy Arelekatti May, 2, 2017 Final
BMVSS Knee a low-cost passive prosthesis to replicate able-bodied motion Molly Berringer, Paige Boehmcke, Jason Fischman, Athena Huang, Danny Joh, Cali Warner Mentor: Murthy Arelekatti May, 2, 2017 Final
Design of Wheeled Mobile Robot with Tri-Star Wheel as Rescue Robot
 Design of Wheeled Mobile Robot with Tri-Star Wheel as Rescue Robot Rafiuddin Syam, Wahyu H. Piarah Mechanical Engineering Department Engineering Faculty, Hasanuddin University Jl. P. Kemerdekaan Km 10
Design of Wheeled Mobile Robot with Tri-Star Wheel as Rescue Robot Rafiuddin Syam, Wahyu H. Piarah Mechanical Engineering Department Engineering Faculty, Hasanuddin University Jl. P. Kemerdekaan Km 10
Multi-body Dynamical Modeling and Co-simulation of Active front Steering Vehicle
 The nd International Conference on Computer Application and System Modeling (01) Multi-body Dynamical Modeling and Co-simulation of Active front Steering Vehicle Feng Ying Zhang Qiao Dept. of Automotive
The nd International Conference on Computer Application and System Modeling (01) Multi-body Dynamical Modeling and Co-simulation of Active front Steering Vehicle Feng Ying Zhang Qiao Dept. of Automotive
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Review of Various Steering Systems for Unmanned Ground Vehicle
 Review of Various Steering Systems for Unmanned Ground Vehicle Pratik Sharma 1, Nikita Sashte 2, Suraj Phadke³ U.G. Student, Department of Mechanical Engineering, Anantrao Pawar Engineering College, Parvati,
Review of Various Steering Systems for Unmanned Ground Vehicle Pratik Sharma 1, Nikita Sashte 2, Suraj Phadke³ U.G. Student, Department of Mechanical Engineering, Anantrao Pawar Engineering College, Parvati,