SAE AERO DESIGN PROJECT PROPULSION & TELEMETRY SYSTEMS UNION COLLEGE FLIGHT CLUB. Ervin Meneses and Joseph Laub Advisor John Spinelli,Ph.
|
|
|
- Gillian Stafford
- 5 years ago
- Views:
Transcription
1 SAE AERO DESIGN PROJECT PROPULSION & TELEMETRY SYSTEMS UNION COLLEGE FLIGHT CLUB Ervin Meneses and Joseph Laub Advisor John Spinelli,Ph.D

2 SAE Aero Design Team Society of Automotive Engineers Team of five, two EE s and three ME s Regular and Advanced Class Competitions
 Scoring Bonus Points Penalties Include Power consumption >1000W Bad take off/landing Design modifications after submitting design")
3 Regular Class Competition Summary Design, build, and test an R/C aircraft Carry max pay loads within 200 ft runway Max combined L,W,H of 175 inches Electric Propulsion Power limiter (1000W) Scoring Bonus Points Penalties Include Power consumption >1000W Bad take off/landing Design modifications after submitting design Report
4 OPTIMIZING POWER CONSUMPTION OF SAE AERO AIRCRAFT Ervin Meneses
5 Design Requirements Project Goals Propulsion Systems Testing Future Work Overview


6 Design Requirements One single electric motor configuration Use of one COMMERCIAL Li-Po Battery Min. Req. of 25C Use of 2015 Power Limiter Install Red Arming Plug

7 Project Goals Provide the team with an aggressive electric propulsion system (EPS) that complies with SAE Aero Rules and provides more that 11 lbf of thrust Design and implement a P.I controller algorithm that optimize the power consumption of EPS(
8 2014 EPS
9 Battery, Propeller, and Motor Selection The


10 Battery Selection 1lb.6oz 6s 4000mAh 1lb 2oz 6S 3200mAh
11 3200mAh vs 4000 mah Bateries Add a plot that they perform the same under the 4 minute interval
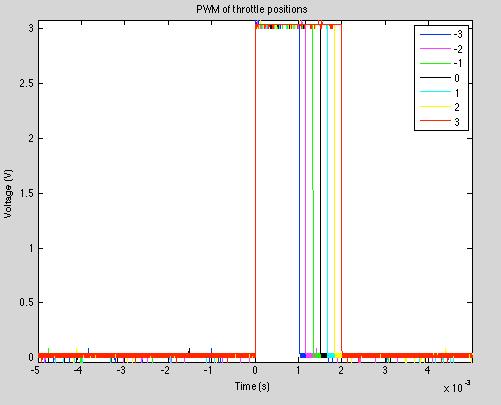

12 Transmitted Signal
13 2015 EPS PWM Analo g Consta nt Power
14 What is a P.I Controller?
15 P.I control Algorithm Block Diagram
16 P.I Control Results But
17 Data Collection Tools Use of Thrust Test Bed Oscilloscope Current Probe BNC to alligator Clip connector Xplorer GLX Graphing Data Logger Dual Load Cell Amplifier Propell er 17x12E x x8E x10E x x x8E x10E Average Thrust (lbf)
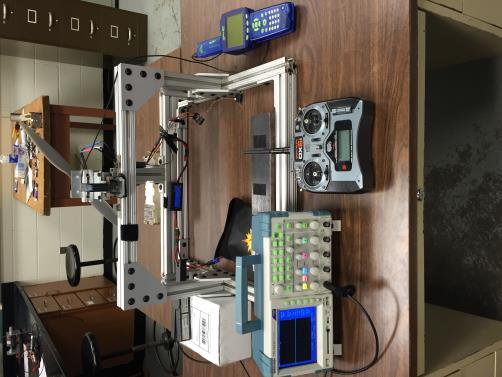
18 Test Bed

19 17x12E Prop
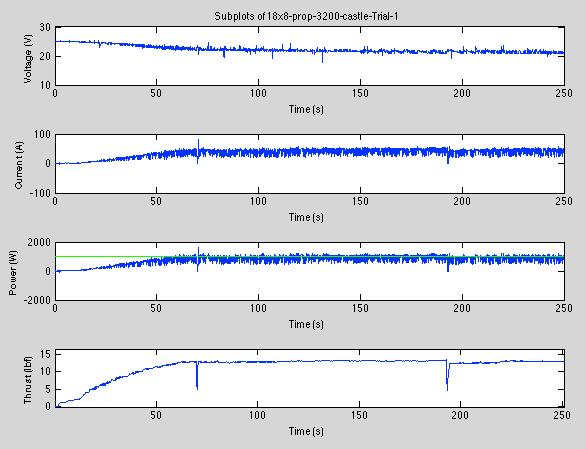
20 18x8 Prop

21 18x8E Prop

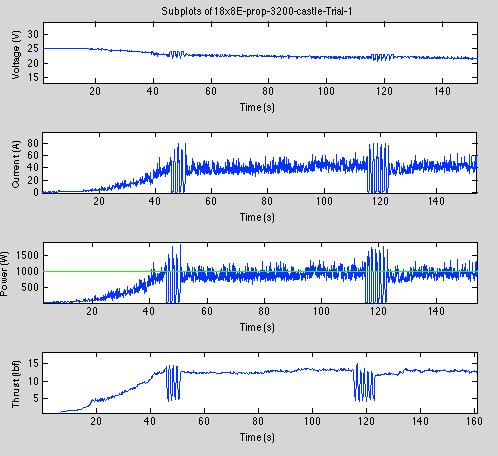
22 Engaging Limiter
23 Add Crash Picture
24 Future Work Finish P.I Control Algorithm Order and test other propellers with different pitches Use Ecalc as a reference for future testing Find lighter motor for future use
25 Questions?
26 TELEMETRY SYSTEMS FOR THE SAE ADVANCED COMPETITION AIRCRAFT By Joseph Laub Advisor: John Spinelli, Ph.D
27 Project Goals This year Improving aircraft prototypes Next year Competing in the Advanced Class
28 Advanced Class Competition The Mission: Drop a three pound humanitarian aid package onto a target from at least 100 feet.
29 Telemetry System SAE Requirements Real-time altitude at ground station. Record altitude at time of drop. Accurate within one foot. Telemetry must have a first person view (FPV).
30 Telemetry System Primary Goals Record: Altitude Air Speed Ground Speed Location Time Transmit altitude to ground station. Calculate lead time to target at ground station.
31 Telemetry System Secondary Goals Overlay altitude and ground speed data on FPV monitor. Accelerometer data. Gyroscopic data. Take off/landing time recorded.



32 Aircraft 2015 Union College Aero Team Prototype 1

33 The Brain The fuselage of the aircraft with telemetry package
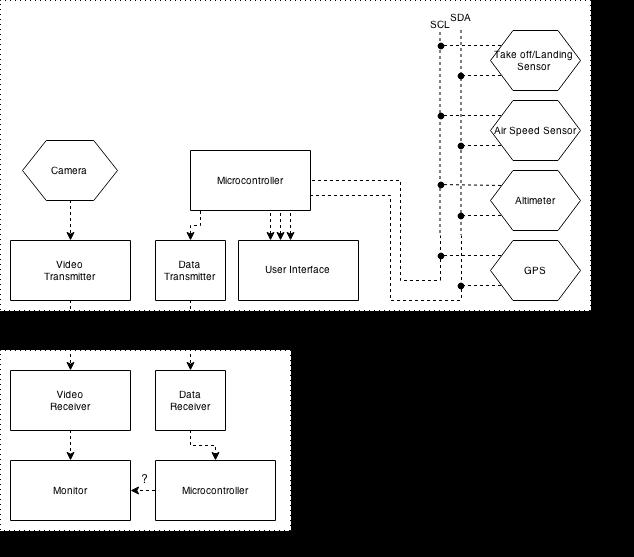
34 Data Acquisition System *Power not shown
35 Data Acquisition System Inter-intergrated circuit (I2C) protocol.

36 Data Acquisition System System block diagram.
 ~9x smaller. ~7x lighter")
37 Microcontroller Arduino Mini Pro (3.3 V) ~9x smaller. ~7x lighter
 GPS UTC Time Location")

38 Sensors Altimeter Pressure Temperature Change in Altitude (from pressure) GPS UTC Time Location (latitude and longitude) Ground Speed Airspeed Sensor Air Speed Range Finder Distance from bottom of fuselage to ground.
39 Data Processed using MATLAB. Air Speed (miles/hour) Fuselage Range Finder (mm) Altitude (feet) Temperature (F) Air Speed Plot from file fakeflight.txt Time (seconds) Fuselage Range Finder Plot from file fakeflight.txt Time (seconds) Altitude Plot from file fakeflight.txt Time (seconds) Temperature Plot from file fakeflight.txt Time (seconds)
40 Future Work Connect GPS using I2C. Continue testing range of RF communication. Include accelerometer.

41 Professor John Spinelli Professor James Hedrick Professor Luke Dosiek Professor Bradford Bruno Gene Davison Stan Gorski Lisa Galeo Rodolfo Santana The 2014 Union College Aero Team Acknowledgments

42 Questions?
SAE Aero Design. Problem Definition and Project Plan
 SAE Aero Design Problem Definition and Project Plan By Ali Alqalaf, Jasem Alshammari, Dong Yang Cao, Darren Frankenberger, Steven Goettl, and John Santoro 10/23/2015 Overview Introduction Need Statement
SAE Aero Design Problem Definition and Project Plan By Ali Alqalaf, Jasem Alshammari, Dong Yang Cao, Darren Frankenberger, Steven Goettl, and John Santoro 10/23/2015 Overview Introduction Need Statement
SAE Aero Design. Apr 29, 2016
 SAE Aero Design Ali Alqalaf, Jasem Alshammari, Dong Yang Cao, Darren Frankenberger, Steven Goettl, and John Santoro Department of Mechanical Engineering Apr 29, 2016 Overview Introduction Need Statement
SAE Aero Design Ali Alqalaf, Jasem Alshammari, Dong Yang Cao, Darren Frankenberger, Steven Goettl, and John Santoro Department of Mechanical Engineering Apr 29, 2016 Overview Introduction Need Statement
Mercury VTOL suas Testing and Measurement Plan
 Mercury VTOL suas Testing and Measurement Plan Introduction Mercury is a small VTOL (Vertical Take-Off and Landing) aircraft that is building off of a quadrotor design. The end goal of the project is for
Mercury VTOL suas Testing and Measurement Plan Introduction Mercury is a small VTOL (Vertical Take-Off and Landing) aircraft that is building off of a quadrotor design. The end goal of the project is for
SAE Aero Design. Mid-point Review 3/10/2016. By Ali Alqalaf, Jasem Alshammari, Dong Yang Cao, Darren Frankenberger, Steven Goettl, and John Santoro
 SAE Aero Design Mid-point Review By Ali Alqalaf, Jasem Alshammari, Dong Yang Cao, Darren Frankenberger, Steven Goettl, and John Santoro 3/10/2016 Overview Introduction Problem Definition Need Statement
SAE Aero Design Mid-point Review By Ali Alqalaf, Jasem Alshammari, Dong Yang Cao, Darren Frankenberger, Steven Goettl, and John Santoro 3/10/2016 Overview Introduction Problem Definition Need Statement
SAE Aero Design. Mid point Review. Ali Alqalaf, Jasem Alshammari, Dong Yang Cao, Darren Frankenberger, Steven Goettl, and John Santoro Team 16
 SAE Aero Design Mid point Review Ali Alqalaf, Jasem Alshammari, Dong Yang Cao, Darren Frankenberger, Steven Goettl, and John Santoro Team 16 Submitted towards partial fulfillment of the requirements for
SAE Aero Design Mid point Review Ali Alqalaf, Jasem Alshammari, Dong Yang Cao, Darren Frankenberger, Steven Goettl, and John Santoro Team 16 Submitted towards partial fulfillment of the requirements for
AEROCARDS CALVERT HALL COLLEGE HIGH SCHOOL 2015 JOURNAL
 AEROCARDS CALVERT HALL COLLEGE HIGH SCHOOL 2015 JOURNAL Team Members: Steve Zhu, Andrew Brannon, Brandon Markiewicz, Christian DeShong, Brendan Dore, Benjamin Mehr, Cannon Buechly, Robby Ackerman, Justin
AEROCARDS CALVERT HALL COLLEGE HIGH SCHOOL 2015 JOURNAL Team Members: Steve Zhu, Andrew Brannon, Brandon Markiewicz, Christian DeShong, Brendan Dore, Benjamin Mehr, Cannon Buechly, Robby Ackerman, Justin
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition
 Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
GCAT. University of Michigan-Dearborn
 GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
Unmanned Aerial Vehicle Design, Development, and Implementation
 Unmanned Aerial Vehicle Design, Development, and Implementation Faculty Advisor Dr. David Schmidt Team Members Patrick Herklotz, Shane Kirkbride, Mike Kopps, Mark Kraska, John Ordeman, Erica Rygg, Matt
Unmanned Aerial Vehicle Design, Development, and Implementation Faculty Advisor Dr. David Schmidt Team Members Patrick Herklotz, Shane Kirkbride, Mike Kopps, Mark Kraska, John Ordeman, Erica Rygg, Matt
High Altitude Balloon
 High Altitude Balloon Power Bus Development Team Todd Rogers Aoun Barki Henok Feseha June 2009 Faculty Advisors John Wu Bruce Rahn (Mentor) Balloon Setup Balloon Parachute Connection Ring Experiment Box
High Altitude Balloon Power Bus Development Team Todd Rogers Aoun Barki Henok Feseha June 2009 Faculty Advisors John Wu Bruce Rahn (Mentor) Balloon Setup Balloon Parachute Connection Ring Experiment Box
NEWSLETTER. Wilbourn Model Airplane Field. P.O. Box 2163 Huntsville, AL November 2017
 www.rocketcityrc.com THE NEWSLETTER Proudly serving the Huntsville community at the Captain Trey... an AMA Award of Excellence Club! Wilbourn Model Airplane Field. P.O. Box 2163 Huntsville, AL 35804 November
www.rocketcityrc.com THE NEWSLETTER Proudly serving the Huntsville community at the Captain Trey... an AMA Award of Excellence Club! Wilbourn Model Airplane Field. P.O. Box 2163 Huntsville, AL 35804 November
Robust Flight Controller for a Hexcopter
 Robust Flight Controller for a Hexcopter ECE 4600 Group Project Proposal Group 02 Members: Bryan Drobot Curtis Einarson Stephanie English Kelly Riha Supervising Professor: Dr. Witold Kinsner Submission
Robust Flight Controller for a Hexcopter ECE 4600 Group Project Proposal Group 02 Members: Bryan Drobot Curtis Einarson Stephanie English Kelly Riha Supervising Professor: Dr. Witold Kinsner Submission
NASA University Student Launch Initiative (Sensor Payload) Final Design Review. Payload Name: G.A.M.B.L.S.
 Final Design Review. Payload Name: G.A.M.B.L.S.") NASA University Student Launch Initiative (Sensor Payload) Final Design Review Payload Name: G.A.M.B.L.S. CPE496-01 Computer Engineering Design II Electrical and Computer Engineering The University of
NASA University Student Launch Initiative (Sensor Payload) Final Design Review Payload Name: G.A.M.B.L.S. CPE496-01 Computer Engineering Design II Electrical and Computer Engineering The University of
JAXA's electric propulsion systems
 JAXA's electric propulsion systems Akira Nishizawa Emission free aircraft section Innovative Aircraft Systems Research Aircraft Systems Research Team Next Generation Aeronautical Innovation Hub Center
JAXA's electric propulsion systems Akira Nishizawa Emission free aircraft section Innovative Aircraft Systems Research Aircraft Systems Research Team Next Generation Aeronautical Innovation Hub Center
Description of the AMT Netherlands Olympus HP gas turbine.
 AMT Netherlands b.v. Spaarpot 34 NL-5667 KX Geldrop Netherlands/Holland Tel: int+31 40 7873130 Fax: int+31 40 7873139 Email: email@amtjets.com website: www.amtjets.com Description of the AMT Netherlands
AMT Netherlands b.v. Spaarpot 34 NL-5667 KX Geldrop Netherlands/Holland Tel: int+31 40 7873130 Fax: int+31 40 7873139 Email: email@amtjets.com website: www.amtjets.com Description of the AMT Netherlands
Solar Glider. ENG460 Engineering Thesis Final Report. Ben Marshall,
 Solar Glider ENG460 Engineering Thesis Final Report Ben Marshall, 30769634 2012 A report submitted to the School of Engineering and Energy, Murdoch University in partial fulfilment of the requirements
Solar Glider ENG460 Engineering Thesis Final Report Ben Marshall, 30769634 2012 A report submitted to the School of Engineering and Energy, Murdoch University in partial fulfilment of the requirements
PRELIMINARY DESIGN REVIEW
 PRELIMINARY DESIGN REVIEW 1 1 Team Structure - Team Leader: Michael Blackwood NAR #101098L2 Certified - Safety Officer: Jay Nagy - Team Mentor: Art Upton NAR #26255L3 Certified - NAR Section: Jackson Model
PRELIMINARY DESIGN REVIEW 1 1 Team Structure - Team Leader: Michael Blackwood NAR #101098L2 Certified - Safety Officer: Jay Nagy - Team Mentor: Art Upton NAR #26255L3 Certified - NAR Section: Jackson Model
Voltage Regulator Test Results. Graph 1: Low Voltage Dropout Characteristics, 1.2A load. Graph 2: Thermal Performance, 2.3A load
 Voltage Regulator Test Results Test performed by: Chris Bajorek (RCG: SoaringDude) Test date: 01/18/2012 last update: 3-26-12 10:30am added pulsed load test results Product tested: Novak 5465 Regulator
Voltage Regulator Test Results Test performed by: Chris Bajorek (RCG: SoaringDude) Test date: 01/18/2012 last update: 3-26-12 10:30am added pulsed load test results Product tested: Novak 5465 Regulator
PROJECT IDEA SUBMISSION
 PROJECT IDEA SUBMISSION Team Contacts - 1 st person listed serves as the point of contact with Professor Nelson - Initial team size may be from 1 to 6 members (all members must agree to have their name
PROJECT IDEA SUBMISSION Team Contacts - 1 st person listed serves as the point of contact with Professor Nelson - Initial team size may be from 1 to 6 members (all members must agree to have their name
AC : USE OF POWER WHEELS CAR TO ILLUSTRATE ENGI- NEERING PRINCIPLES
 AC 2011-2029: USE OF POWER WHEELS CAR TO ILLUSTRATE ENGI- NEERING PRINCIPLES Dr. Howard Medoff, Pennsylvania State University, Ogontz Campus Associate Professor of Engineering, Penn State Abington Research
AC 2011-2029: USE OF POWER WHEELS CAR TO ILLUSTRATE ENGI- NEERING PRINCIPLES Dr. Howard Medoff, Pennsylvania State University, Ogontz Campus Associate Professor of Engineering, Penn State Abington Research
Presentation Outline. # Title
 FRR Presentation 1 Presentation Outline # Title 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 Team Introduction Mission Summary Vehicle Overview Vehicle Dimensions Upper Body Section Elliptical
FRR Presentation 1 Presentation Outline # Title 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 Team Introduction Mission Summary Vehicle Overview Vehicle Dimensions Upper Body Section Elliptical
Table of Contents. Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.
 Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.") March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
Auburn University. Project Wall-Eagle FRR
 Auburn University Project Wall-Eagle FRR Rocket Design Rocket Model Mass Estimates Booster Section Mass(lb.) Estimated Upper Section Mass(lb.) Actual Component Mass(lb.) Estimated Mass(lb.) Actual Component
Auburn University Project Wall-Eagle FRR Rocket Design Rocket Model Mass Estimates Booster Section Mass(lb.) Estimated Upper Section Mass(lb.) Actual Component Mass(lb.) Estimated Mass(lb.) Actual Component
Deliverable 3 Autonomous Flight Record
 Deliverable 3 Autonomous Flight Record 2012 UAV Outback Challenge Search and Rescue Challenge www.canberrauav.com Proudly Sponsored by: Paul Tridgell Terry Porter Grant Morphett Ron Graham Page 1 of 11
Deliverable 3 Autonomous Flight Record 2012 UAV Outback Challenge Search and Rescue Challenge www.canberrauav.com Proudly Sponsored by: Paul Tridgell Terry Porter Grant Morphett Ron Graham Page 1 of 11
S.E.V Solar Extended Vehicle
 S.E.V Solar Extended Vehicle EEL 4914 Senior Design II Group #4 Hamed Alostath Daniel Grainger Frank Niles Sergio Roig Motivation The majority of electric motor RC planes tend to have a low flight time
S.E.V Solar Extended Vehicle EEL 4914 Senior Design II Group #4 Hamed Alostath Daniel Grainger Frank Niles Sergio Roig Motivation The majority of electric motor RC planes tend to have a low flight time
Team Air Mail Preliminary Design Review
 Team Air Mail Preliminary Design Review 2014-2015 Space Grant Midwest High-Power Rocket Competition UAH Space Hardware Club Huntsville, AL Top: Will Hill, Davis Hunter, Beth Dutour, Bradley Henderson,
Team Air Mail Preliminary Design Review 2014-2015 Space Grant Midwest High-Power Rocket Competition UAH Space Hardware Club Huntsville, AL Top: Will Hill, Davis Hunter, Beth Dutour, Bradley Henderson,
Electric VTOL Aircraft
 Electric VTOL Aircraft Subscale Prototyping Overview Francesco Giannini fgiannini@aurora.aero 1 08 June 8 th, 2017 Contents Intro to Aurora Motivation & approach for the full-scale vehicle Technical challenges
Electric VTOL Aircraft Subscale Prototyping Overview Francesco Giannini fgiannini@aurora.aero 1 08 June 8 th, 2017 Contents Intro to Aurora Motivation & approach for the full-scale vehicle Technical challenges
How to use the Multirotor Motor Performance Data Charts
 How to use the Multirotor Motor Performance Data Charts Here at Innov8tive Designs, we spend a lot of time testing all of the motors that we sell, and collect a large amount of data with a variety of propellers.
How to use the Multirotor Motor Performance Data Charts Here at Innov8tive Designs, we spend a lot of time testing all of the motors that we sell, and collect a large amount of data with a variety of propellers.
NUMAV. AIAA at Northeastern University
 NUMAV AIAA at Northeastern University Team Officials Andrew Buggee, President, Northeastern AIAA chapter Dr. Andrew Goldstone, Faculty Advisor John Hume, Safety Officer Rob DeHate, Team Mentor Team Roster
NUMAV AIAA at Northeastern University Team Officials Andrew Buggee, President, Northeastern AIAA chapter Dr. Andrew Goldstone, Faculty Advisor John Hume, Safety Officer Rob DeHate, Team Mentor Team Roster
C&E Development Group 5500 Campanile Dr, San Diego, CA 92182
 C&E Development Group 5500 Campanile Dr, San Diego, CA 92182 OMUS the Autonomous Mini-Sumo Robot OMUS.sdsu.edu Engineers: Adrian Alonzo Burcin Caliskan Ryan Dill Nick Kelley Mohamed Nagibulla Sahathep
C&E Development Group 5500 Campanile Dr, San Diego, CA 92182 OMUS the Autonomous Mini-Sumo Robot OMUS.sdsu.edu Engineers: Adrian Alonzo Burcin Caliskan Ryan Dill Nick Kelley Mohamed Nagibulla Sahathep
UAV KF-1 helicopter. CopterCam UAV KF-1 helicopter specification
 UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
AIRCRAFT AND TECHNOLOGY CONCEPTS FOR AN N+3 SUBSONIC TRANSPORT. Elena de la Rosa Blanco May 27, 2010
 AIRCRAFT AND TECHNOLOGY CONCEPTS FOR AN N+3 SUBSONIC TRANSPORT MIT, Aurora Flights Science, and Pratt & Whitney Elena de la Rosa Blanco May 27, 2010 1 The information in this document should not be disclosed
AIRCRAFT AND TECHNOLOGY CONCEPTS FOR AN N+3 SUBSONIC TRANSPORT MIT, Aurora Flights Science, and Pratt & Whitney Elena de la Rosa Blanco May 27, 2010 1 The information in this document should not be disclosed
The winner team will have the opportunity to perform a wind tunnel test campaign in the transonic/supersonic Wind tunnel at the VKI.
 Aircraft Design Competition Request for proposal (RFP) - High speed UAV Objectives: This RFP asks for an original UAV design capable of reaching, in less than 15 minutes, a given target located at 150
Aircraft Design Competition Request for proposal (RFP) - High speed UAV Objectives: This RFP asks for an original UAV design capable of reaching, in less than 15 minutes, a given target located at 150
SAE Baja - Drivetrain
 SAE Baja - Drivetrain By Ricardo Inzunza, Brandon Janca, Ryan Worden Team 11 Engineering Analysis Document Submitted towards partial fulfillment of the requirements for Mechanical Engineering Design I
SAE Baja - Drivetrain By Ricardo Inzunza, Brandon Janca, Ryan Worden Team 11 Engineering Analysis Document Submitted towards partial fulfillment of the requirements for Mechanical Engineering Design I
Critical Design Review
 Critical Design Review University of Illinois at Urbana-Champaign NASA Student Launch 2017-2018 Illinois Space Society 1 Overview Illinois Space Society 2 Launch Vehicle Summary Javier Brown Illinois Space
Critical Design Review University of Illinois at Urbana-Champaign NASA Student Launch 2017-2018 Illinois Space Society 1 Overview Illinois Space Society 2 Launch Vehicle Summary Javier Brown Illinois Space
ELECTRIC POWER TRAINS THE KEY ENABLER FOR CONTRA ROTATING PROPELLERS IN GENERAL AVIATION (& VICE VERSA)
") ELECTRIC POWER TRAINS THE KEY ENABLER FOR CONTRA ROTATING PROPELLERS IN GENERAL AVIATION (& VICE VERSA) ATI D3 EVENT 8 TH MAY 2018 THE EMERGENCE OF ELECTRIFICATION IN AEROSPACE NICK SILLS, CONTRA ELECTRIC
ELECTRIC POWER TRAINS THE KEY ENABLER FOR CONTRA ROTATING PROPELLERS IN GENERAL AVIATION (& VICE VERSA) ATI D3 EVENT 8 TH MAY 2018 THE EMERGENCE OF ELECTRIFICATION IN AEROSPACE NICK SILLS, CONTRA ELECTRIC
Project NOVA
 Project NOVA 2017-2018 Our Mission Design a Rocket Capable of: Apogee of 5280 ft Deploying an autonomous Rover Vehicle REILLY B. Vehicle Dimensions Total Length of 108 inches Inner Diameter of 6 inches
Project NOVA 2017-2018 Our Mission Design a Rocket Capable of: Apogee of 5280 ft Deploying an autonomous Rover Vehicle REILLY B. Vehicle Dimensions Total Length of 108 inches Inner Diameter of 6 inches
Team Introduction Competition Background Current Situation Project Goals Stakeholders Use Scenario Customer Needs Engineering Requirements
 Team Introduction Competition Background Current Situation Project Goals Stakeholders Use Scenario Customer Needs Engineering Requirements Constraints Project Plan Risk Analysis Questions Christopher Jones
Team Introduction Competition Background Current Situation Project Goals Stakeholders Use Scenario Customer Needs Engineering Requirements Constraints Project Plan Risk Analysis Questions Christopher Jones
UHABS-5 Mission Zeppelin
 UHABS-5 Mission Zeppelin Team Members: Likeke Aipa, Drex Arine, Andrew Bui, Karen Calaro, Kanekahekilinuinanaueikalani Clark, Ka Chon Liu, Cyrus Noveloso, Reagan Paz, Yun Feng Tan, Jake Torigoe, Emanuel
UHABS-5 Mission Zeppelin Team Members: Likeke Aipa, Drex Arine, Andrew Bui, Karen Calaro, Kanekahekilinuinanaueikalani Clark, Ka Chon Liu, Cyrus Noveloso, Reagan Paz, Yun Feng Tan, Jake Torigoe, Emanuel
Lecture 1: Basic Ideas, Safety and Administration.
 Lecture 1: Basic Ideas, Safety and Administration Lecture 1 Page: 1 Basic Ideas Safety Administration colintan@nus.edu.sg Lecture 1: Basic Ideas, Safety and Administration Page: 2 WELCOME TO SINGAPORE
Lecture 1: Basic Ideas, Safety and Administration Lecture 1 Page: 1 Basic Ideas Safety Administration colintan@nus.edu.sg Lecture 1: Basic Ideas, Safety and Administration Page: 2 WELCOME TO SINGAPORE
British Model Flying Association 2010 Rules for Electric class esoaring (Height Limited Rules) Class.
 Class.") British Model Flying Association 2010 Rules for Electric class 7.12 7.12.1 OBJECTIVE 7.12 esoaring (Height Limited Rules) Class. To provide an electric powered model aircraft thermal soaring event, where
British Model Flying Association 2010 Rules for Electric class 7.12 7.12.1 OBJECTIVE 7.12 esoaring (Height Limited Rules) Class. To provide an electric powered model aircraft thermal soaring event, where
2015 AUVSI UAS Competition Journal Paper
 2015 AUVSI UAS Competition Journal Paper Abstract We are the Unmanned Aerial Systems (UAS) team from the South Dakota School of Mines and Technology (SDSM&T). We have built an unmanned aerial vehicle (UAV)
2015 AUVSI UAS Competition Journal Paper Abstract We are the Unmanned Aerial Systems (UAS) team from the South Dakota School of Mines and Technology (SDSM&T). We have built an unmanned aerial vehicle (UAV)
REU: Improving Straight Line Travel in a Miniature Wheeled Robot
 THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
Answer Key. Page 1 of 10
 Name: Answer Key Score: [1] When range and economy of operation are the principal goals, the pilot must ensure that the airplane will be operated at the recommended A. equivalent airspeed. B. specific
Name: Answer Key Score: [1] When range and economy of operation are the principal goals, the pilot must ensure that the airplane will be operated at the recommended A. equivalent airspeed. B. specific
AT-10 Electric/HF Hybrid VTOL UAS
 AT-10 Electric/HF Hybrid VTOL UAS Acuity Technologies Robert Clark bob@acuitytx.com Summary The AT-10 is a tactical size hybrid propulsion VTOL UAS with a nose camera mount and a large payload bay. Propulsion
AT-10 Electric/HF Hybrid VTOL UAS Acuity Technologies Robert Clark bob@acuitytx.com Summary The AT-10 is a tactical size hybrid propulsion VTOL UAS with a nose camera mount and a large payload bay. Propulsion
Pothole Tracker. Muhammad Mir. Daniel Chin. Mike Catalano. Bill Quigg Advisor: Professor Ciesielski
 Pothole Tracker Muhammad Mir. Daniel Chin. Mike Catalano. Bill Quigg Advisor: Professor Ciesielski Pothole Tracker Muhammad Mir CSE Team 5 Daniel Chin CSE Mike Catalano EE Bill Quigg EE Why are Potholes
Pothole Tracker Muhammad Mir. Daniel Chin. Mike Catalano. Bill Quigg Advisor: Professor Ciesielski Pothole Tracker Muhammad Mir CSE Team 5 Daniel Chin CSE Mike Catalano EE Bill Quigg EE Why are Potholes
SAE Aero Design. Operations Manual. Ali Alqalaf, Jasem Alshammari, Dong Yang Cao, Darren Frankenberger, Steven Goettl, and John Santoro.
 SAE Aero Design Operations Manual Ali Alqalaf, Jasem Alshammari, Dong Yang Cao, Darren Frankenberger, Steven Goettl, and John Santoro Team 16 Submitted towards partial fulfillment of the requirements for
SAE Aero Design Operations Manual Ali Alqalaf, Jasem Alshammari, Dong Yang Cao, Darren Frankenberger, Steven Goettl, and John Santoro Team 16 Submitted towards partial fulfillment of the requirements for
Mini-Lab Gas Turbine Power System TM Sample Lab Experiment Manual
 Mini-Lab Gas Turbine Power System TM Sample Lab Experiment Manual Lab Session #1: System Overview and Operation Purpose: To gain an understanding of the Mini-Lab TM Gas Turbine Power System as a whole
Mini-Lab Gas Turbine Power System TM Sample Lab Experiment Manual Lab Session #1: System Overview and Operation Purpose: To gain an understanding of the Mini-Lab TM Gas Turbine Power System as a whole
Double Marine Gearboxes Type NDS(H)(Q)(L)
(Q)(L)") Double Marine Gearboxes Type NDS(H)(Q)(L) Gear units for the highest demands Picture courtesy of ALP Maritime Services NDS(H)(Q)(L) N = Parallel shafts DS = Double marine gear unit H = Bull wheel, case-hardened
Double Marine Gearboxes Type NDS(H)(Q)(L) Gear units for the highest demands Picture courtesy of ALP Maritime Services NDS(H)(Q)(L) N = Parallel shafts DS = Double marine gear unit H = Bull wheel, case-hardened
Uninhabited Air Vehicle (UAV) Costing Considerations PSI Team. SCAF Workshop 22 November 2010
 Costing Considerations PSI Team. SCAF Workshop 22 November 2010") Uninhabited Air Vehicle (UAV) Costing Considerations PSI Team SCAF Workshop 22 November 2010 UAV Design Considerations 1. Role 2. Design quality military / commercial? 3. Performance altitude, speed, endurance
Uninhabited Air Vehicle (UAV) Costing Considerations PSI Team SCAF Workshop 22 November 2010 UAV Design Considerations 1. Role 2. Design quality military / commercial? 3. Performance altitude, speed, endurance
Development of an Autonomous Aerial Reconnaissance Platform at Virginia Tech
 Development of an Autonomous Aerial Reconnaissance Platform at Virginia Tech Gregg Vonder Reith, Ken Meidenbauer, Imraan Faruque, Chris Sharkey Jared Cooper, Shane Barnett, Dr. Charles Reinholtz Department
Development of an Autonomous Aerial Reconnaissance Platform at Virginia Tech Gregg Vonder Reith, Ken Meidenbauer, Imraan Faruque, Chris Sharkey Jared Cooper, Shane Barnett, Dr. Charles Reinholtz Department
Methodology for Distributed Electric Propulsion Aircraft Control Development with Simulation and Flight Demonstration
 1 Methodology for Distributed Electric Propulsion Aircraft Control Development with Simulation and Flight Demonstration Presented by: Jeff Freeman Empirical Systems Aerospace, Inc. jeff.freeman@esaero.com,
1 Methodology for Distributed Electric Propulsion Aircraft Control Development with Simulation and Flight Demonstration Presented by: Jeff Freeman Empirical Systems Aerospace, Inc. jeff.freeman@esaero.com,
On-Demand Mobility Electric Propulsion Roadmap
 On-Demand Mobility Electric Propulsion Roadmap Mark Moore, ODM Senior Advisor NASA Langley Research Center EAA AirVenture, Oshkosh July 22, 2015 NASA Distributed Electric Propulsion Research Rapid, early
On-Demand Mobility Electric Propulsion Roadmap Mark Moore, ODM Senior Advisor NASA Langley Research Center EAA AirVenture, Oshkosh July 22, 2015 NASA Distributed Electric Propulsion Research Rapid, early
Georgia Tech NASA Critical Design Review Teleconference Presented By: Georgia Tech Team ARES
 Georgia Tech NASA Critical Design Review Teleconference Presented By: Georgia Tech Team ARES 1 Agenda 1. Team Overview (1 Min) 2. 3. 4. 5. 6. 7. Changes Since Proposal (1 Min) Educational Outreach (1 Min)
Georgia Tech NASA Critical Design Review Teleconference Presented By: Georgia Tech Team ARES 1 Agenda 1. Team Overview (1 Min) 2. 3. 4. 5. 6. 7. Changes Since Proposal (1 Min) Educational Outreach (1 Min)
SAE Baja: Suspension & Steering Benjamin Bastidos, Victor Cabilan, Jeramie Goodwin, William Mitchell, Eli Wexler
 SAE Baja: Suspension & Steering Benjamin Bastidos, Victor Cabilan, Jeramie Goodwin, William Mitchell, Eli Wexler Wednesday, October 9, 2013 Overview Introduction Operating Environment Recognizing the Need
SAE Baja: Suspension & Steering Benjamin Bastidos, Victor Cabilan, Jeramie Goodwin, William Mitchell, Eli Wexler Wednesday, October 9, 2013 Overview Introduction Operating Environment Recognizing the Need
Palos Verdes High School 1
 Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
CHARGE DU SOLEIL TAKING CHARGE OF THE FUTURE. DANIEL ZAPATA, EE
 CHARGE DU SOLEIL TAKING CHARGE OF THE FUTURE. GROUP XII ALAN M CHAMPAGNE, EE AARON MITCHELL, CPE DANIEL ZAPATA, EE Summary Solar-powered remote-controlled vehicle with mobile device charging capabilities
CHARGE DU SOLEIL TAKING CHARGE OF THE FUTURE. GROUP XII ALAN M CHAMPAGNE, EE AARON MITCHELL, CPE DANIEL ZAPATA, EE Summary Solar-powered remote-controlled vehicle with mobile device charging capabilities
AGENDA. Hyperloop Competition Team Printed Circuit Board Sensor Data Actuation Communication Conclusion Questions. Hyperloop. Competition.
 CONTROLLER AGENDA Questions 2 INTRODUCTION Celeste Bean Connor Buckland Ben Hartl Cameron McCarthy Connor Mulcahey 3 HYPERLOOP Cities < 700 miles apart Max speed of 760 mph 4 HYPERLOOP Depressurized steel
CONTROLLER AGENDA Questions 2 INTRODUCTION Celeste Bean Connor Buckland Ben Hartl Cameron McCarthy Connor Mulcahey 3 HYPERLOOP Cities < 700 miles apart Max speed of 760 mph 4 HYPERLOOP Depressurized steel
NWIC Space Center s 2017 First Nations Launch Achievements
 NWIC Space Center s 2017 First Nations Launch Achievements On April 18, 2017, we were on two airplanes to Milwaukee, Wisconsin by 6:30 am for a long flight. There were 12 students, 3 mentors, 2 toddlers
NWIC Space Center s 2017 First Nations Launch Achievements On April 18, 2017, we were on two airplanes to Milwaukee, Wisconsin by 6:30 am for a long flight. There were 12 students, 3 mentors, 2 toddlers
NASA SL - NU FRONTIERS. PDR presentation to the NASA Student Launch Review Panel
 NASA SL - NU FRONTIERS PDR presentation to the NASA Student Launch Review Panel 1 Agenda Launch Vehicle Overview Nose Cone Section Payload Section Lower Avionic Bay Section Booster Section Motor Selection
NASA SL - NU FRONTIERS PDR presentation to the NASA Student Launch Review Panel 1 Agenda Launch Vehicle Overview Nose Cone Section Payload Section Lower Avionic Bay Section Booster Section Motor Selection
Electrical Engineering Within a Robotic System
 Electrical Engineering Within a Robotic System Carli Hand Fall, 2016 Synopsis The NASA Robotics Mining Competition (RMC) is held every year at Kennedy Space Center, Florida. Fifty universities assemble
Electrical Engineering Within a Robotic System Carli Hand Fall, 2016 Synopsis The NASA Robotics Mining Competition (RMC) is held every year at Kennedy Space Center, Florida. Fifty universities assemble
Experimental Validation of a Scalable Mobile Robot for Traversing Ferrous Pipelines
 Project Number: MQP TP1- IPG1 Experimental Validation of a Scalable Mobile Robot for Traversing Ferrous Pipelines A Major Qualifying Project (MQP) Submitted to the Faculty of WORCESTER POYTECHNIC INSTITUTE
Project Number: MQP TP1- IPG1 Experimental Validation of a Scalable Mobile Robot for Traversing Ferrous Pipelines A Major Qualifying Project (MQP) Submitted to the Faculty of WORCESTER POYTECHNIC INSTITUTE
Rocketry Projects Conducted at the University of Cincinnati
 Rocketry Projects Conducted at the University of Cincinnati 2009-2010 Grant Schaffner, Ph.D. (Advisor) Rob Charvat (Student) 17 September 2010 1 Spacecraft Design Course Objectives Students gain experience
Rocketry Projects Conducted at the University of Cincinnati 2009-2010 Grant Schaffner, Ph.D. (Advisor) Rob Charvat (Student) 17 September 2010 1 Spacecraft Design Course Objectives Students gain experience
System Level Design Review
 System Level Design Review HABIP High Altitude Balloon Instrumentation Platform P17104 & P17105 October 6, 2016 Team Members Team Communications Data Acquisition and Control Systems Team Member Major Team
System Level Design Review HABIP High Altitude Balloon Instrumentation Platform P17104 & P17105 October 6, 2016 Team Members Team Communications Data Acquisition and Control Systems Team Member Major Team
DSSI UAV. Unmanned Aerial Vehicle. Research & Development Project
 UAV Unmanned Aerial Vehicle HISTORY AND SKILLS of Small UAV with electrically powered propeller Description of the solution: Airframe,electronics, 2 battery sets 1 spare Airframe, battery charger Transport
UAV Unmanned Aerial Vehicle HISTORY AND SKILLS of Small UAV with electrically powered propeller Description of the solution: Airframe,electronics, 2 battery sets 1 spare Airframe, battery charger Transport
Opportunities For Innovative Collaboration. Propulsion Directorate Propulsion & Power for the 21st Century Warfighter
 Opportunities For Innovative Collaboration Propulsion Directorate Propulsion & Power for the 21st Century Warfighter Propulsion Directorate Our Mission Create and transition advanced air breathing and
Opportunities For Innovative Collaboration Propulsion Directorate Propulsion & Power for the 21st Century Warfighter Propulsion Directorate Our Mission Create and transition advanced air breathing and
AIAA Foundation Undergraduate Team Aircraft Design Competition. RFP: Cruise Missile Carrier
 AIAA Foundation Undergraduate Team Aircraft Design Competition RFP: Cruise Missile Carrier 1999/2000 AIAA FOUNDATION Undergraduate Team Aircraft Design Competition I. RULES 1. All groups of three to ten
AIAA Foundation Undergraduate Team Aircraft Design Competition RFP: Cruise Missile Carrier 1999/2000 AIAA FOUNDATION Undergraduate Team Aircraft Design Competition I. RULES 1. All groups of three to ten
Week 11. Module 5: EE100 Course Project Making your first robot
 Week 11 Module 5: EE100 Course Project Making your first robot Dr. Ing. Ahmad Kamal Nasir Office Hours: Room 9-245A Tuesday (1000-1100) Wednesday (1500-1600) Course Project: Wall-Follower Robot Week 1
Week 11 Module 5: EE100 Course Project Making your first robot Dr. Ing. Ahmad Kamal Nasir Office Hours: Room 9-245A Tuesday (1000-1100) Wednesday (1500-1600) Course Project: Wall-Follower Robot Week 1
TEPZZ 67_744A_T EP A1 (19) (11) EP A1 (12) EUROPEAN PATENT APPLICATION. (51) Int Cl.: B60K 6/10 ( )
 (11) EP A1 (12) EUROPEAN PATENT APPLICATION. (51) Int Cl.: B60K 6/10 ( )") (19) TEPZZ 67_744A_T (11) EP 2 671 744 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: 11.12.2013 Bulletin 2013/50 (51) Int Cl.: B60K 6/10 (2006.01) (21) Application number: 13169502.5 (22)
(19) TEPZZ 67_744A_T (11) EP 2 671 744 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: 11.12.2013 Bulletin 2013/50 (51) Int Cl.: B60K 6/10 (2006.01) (21) Application number: 13169502.5 (22)
SAE Mini BAJA: Suspension and Steering
 SAE Mini BAJA: Suspension and Steering By Zane Cross, Kyle Egan, Nick Garry, Trevor Hochhaus Team 11 Problem Formulation and Project Plan Report Submitted towards partial fulfillment of the requirements
SAE Mini BAJA: Suspension and Steering By Zane Cross, Kyle Egan, Nick Garry, Trevor Hochhaus Team 11 Problem Formulation and Project Plan Report Submitted towards partial fulfillment of the requirements
Jay Gundlach AIAA EDUCATION SERIES. Manassas, Virginia. Joseph A. Schetz, Editor-in-Chief. Blacksburg, Virginia. Aurora Flight Sciences
 Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Rotary Wing Micro Air Vehicle Endurance
 Rotary Wing Micro Air Vehicle Endurance Klaus-Peter Neitzke University of Applied Science Nordhausen, Nordhausen, Germany neitzke@fh-nordhausen.de Abstract One of the first questions to pilots of rotor
Rotary Wing Micro Air Vehicle Endurance Klaus-Peter Neitzke University of Applied Science Nordhausen, Nordhausen, Germany neitzke@fh-nordhausen.de Abstract One of the first questions to pilots of rotor
SAE Baja - Drivetrain
 SAE Baja - Drivetrain By Ricardo Inzunza, Brandon Janca, Ryan Worden Team 11A Concept Generation and Selection Document Submitted towards partial fulfillment of the requirements for Mechanical Engineering
SAE Baja - Drivetrain By Ricardo Inzunza, Brandon Janca, Ryan Worden Team 11A Concept Generation and Selection Document Submitted towards partial fulfillment of the requirements for Mechanical Engineering
CRITICAL DESIGN REVIEW. University of South Florida Society of Aeronautics and Rocketry
 CRITICAL DESIGN REVIEW University of South Florida Society of Aeronautics and Rocketry 2017-2018 AGENDA 1. Launch Vehicle 2. Recovery 3. Testing 4. Subscale Vehicle 5. Payload 6. Educational Outreach 7.
CRITICAL DESIGN REVIEW University of South Florida Society of Aeronautics and Rocketry 2017-2018 AGENDA 1. Launch Vehicle 2. Recovery 3. Testing 4. Subscale Vehicle 5. Payload 6. Educational Outreach 7.
Maryland UAS Team AUVSI SUAS Competition Journal Paper
 Maryland UAS Team 2015 AUVSI SUAS Competition Journal Paper The Maryland UAS Team is competing in the AUVSI Student UAS Competition for the first time this year. Their Ouroboros system is based on the
Maryland UAS Team 2015 AUVSI SUAS Competition Journal Paper The Maryland UAS Team is competing in the AUVSI Student UAS Competition for the first time this year. Their Ouroboros system is based on the
Elmendorf Aero Club Aircraft Test
 DO NOT WRITE ON THIS TEST FEB 2013 Elmendorf Aero Club Aircraft Test Cessna - 182 For the following questions, you will need to refer to the Pilots Information Manual for the C-182R. The bonus questions
DO NOT WRITE ON THIS TEST FEB 2013 Elmendorf Aero Club Aircraft Test Cessna - 182 For the following questions, you will need to refer to the Pilots Information Manual for the C-182R. The bonus questions
Overview. Mission Overview Payload and Subsystems Rocket and Subsystems Management
 MIT ROCKET TEAM Overview Mission Overview Payload and Subsystems Rocket and Subsystems Management Purpose and Mission Statement Our Mission: Use a rocket to rapidly deploy a UAV capable of completing search
MIT ROCKET TEAM Overview Mission Overview Payload and Subsystems Rocket and Subsystems Management Purpose and Mission Statement Our Mission: Use a rocket to rapidly deploy a UAV capable of completing search
Weight Effects Part 1
 Weight Effects Part 1 David F. Rogers Copyright c 1997-1999 David F. Rogers. All rights reserved. Most of us normally operate our aircraft at less than gross weight, yet weight significantly affects the
Weight Effects Part 1 David F. Rogers Copyright c 1997-1999 David F. Rogers. All rights reserved. Most of us normally operate our aircraft at less than gross weight, yet weight significantly affects the
Presentation Outline. # Title # Title
 CDR Presentation 1 Presentation Outline # Title # Title 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 Team Introduction Vehicle Overview Vehicle Dimensions Upper Body Section Payload
CDR Presentation 1 Presentation Outline # Title # Title 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 Team Introduction Vehicle Overview Vehicle Dimensions Upper Body Section Payload
BAYLOR UNIVERSITY DEPARTMENT OF ENGINEERING. EGR 4347 Analysis and Design of Propulsion Systems Fall 2002 ASSIGNMENT GUIDELINES
 BAYLOR UNIVERSITY DEPARTMENT OF ENGINEERING EGR 4347 Analysis and Design of Propulsion Systems Fall 2002 Design Project I Dr Van Treuren 100 points ASSIGNMENT GUIDELINES For this assignment, you may work
BAYLOR UNIVERSITY DEPARTMENT OF ENGINEERING EGR 4347 Analysis and Design of Propulsion Systems Fall 2002 Design Project I Dr Van Treuren 100 points ASSIGNMENT GUIDELINES For this assignment, you may work
Projectile Impact Tester
 Projectile Impact Tester Design Team Neil Cameron, Laura Paradis, Tristan Whiting Betsy Huse, James Leithauser Design Advisor Prof. Mohammad Taslim Abstract The purpose of this project was to design a
Projectile Impact Tester Design Team Neil Cameron, Laura Paradis, Tristan Whiting Betsy Huse, James Leithauser Design Advisor Prof. Mohammad Taslim Abstract The purpose of this project was to design a
NAU Robosub. Project Proposal
 NAU Robosub Project Proposal Mansour Alajemi, Feras Aldawsari, Curtis Green, Daniel Heaton, Wenkai Ren, William Ritchie, Bethany Sprinkle, Daniel Tkachenko December 09, 2015 Bethany Overview Introduction
NAU Robosub Project Proposal Mansour Alajemi, Feras Aldawsari, Curtis Green, Daniel Heaton, Wenkai Ren, William Ritchie, Bethany Sprinkle, Daniel Tkachenko December 09, 2015 Bethany Overview Introduction
University Student Launch Initiative
 University Student Launch Initiative HARDING UNIVERSITY Critical Design Review February 4, 2008 The Team Dr. Edmond Wilson Brett Keller Team Official Project Leader, Safety Officer Professor of Chemistry
University Student Launch Initiative HARDING UNIVERSITY Critical Design Review February 4, 2008 The Team Dr. Edmond Wilson Brett Keller Team Official Project Leader, Safety Officer Professor of Chemistry
AUV ROBOSUB
 AUV ROBOSUB 2016-2017 COLORADO STATE UNIVERSITY ELECTRICAL AND COMPUTER ENGINEERING DEPARTMENT SENIOR DESIGN FALL 2016 PRESENTATION OVERVIEW 1. Introduction to the team and project 2. Sub-team constraints
AUV ROBOSUB 2016-2017 COLORADO STATE UNIVERSITY ELECTRICAL AND COMPUTER ENGINEERING DEPARTMENT SENIOR DESIGN FALL 2016 PRESENTATION OVERVIEW 1. Introduction to the team and project 2. Sub-team constraints
Cessna Citation Model Stats
 Cessna Citation Model Stats Cessna Citation Sovereign - Dimensions Length 63 ft 6 in (19.35 m) Height 20 ft 4 in (6.20 m) Wingspan 72 ft 4 in (22.04 m) Wing Wing Area Wing Sweep Wheelbase Tread 516 sq
Cessna Citation Model Stats Cessna Citation Sovereign - Dimensions Length 63 ft 6 in (19.35 m) Height 20 ft 4 in (6.20 m) Wingspan 72 ft 4 in (22.04 m) Wing Wing Area Wing Sweep Wheelbase Tread 516 sq
Department of Electrical and Computer Science
 Department of Electrical and Computer Science Howard University Washington, DC 20059 EECE 401 & 402 Senior Design Final Report By Team AutoMoe Tavares Kidd @ 02744064 Lateef Adetona @02732398 Jordan Lafontant
Department of Electrical and Computer Science Howard University Washington, DC 20059 EECE 401 & 402 Senior Design Final Report By Team AutoMoe Tavares Kidd @ 02744064 Lateef Adetona @02732398 Jordan Lafontant
2014 Autonomous Aerial Vehicle Competition Rules
 Rev 2014.03.7 2014 Autonomous Aerial Vehicle Competition Rules Sponsored by Air Force Research Laboratory Dayton Development Coalition Institute of Navigation Advanced Navigation Technology Center at the
Rev 2014.03.7 2014 Autonomous Aerial Vehicle Competition Rules Sponsored by Air Force Research Laboratory Dayton Development Coalition Institute of Navigation Advanced Navigation Technology Center at the
COMET: Colorado Mini Engine Team Manufacturing Status Review February 3, 2014
 COMET: Colorado Mini Engine Team Status Review February 3, 2014 Team members: Julia Contreras-Garcia Emily Ehrle Eric James Jonathan Lumpkin Matthew McClain Megan O Sullivan Benjamin Woeste Kevin Wong
COMET: Colorado Mini Engine Team Status Review February 3, 2014 Team members: Julia Contreras-Garcia Emily Ehrle Eric James Jonathan Lumpkin Matthew McClain Megan O Sullivan Benjamin Woeste Kevin Wong
University of New Hampshire: FSAE ECE Progress Report
 University of New Hampshire: FSAE ECE Progress Report Team Members: Christopher P. Loo & Joshua L. Moran Faculty Advisor: Francis C. Hludik, Jr., M.S. Courses Involved: ECE 541, ECE 543, ECE 562, ECE 633,
University of New Hampshire: FSAE ECE Progress Report Team Members: Christopher P. Loo & Joshua L. Moran Faculty Advisor: Francis C. Hludik, Jr., M.S. Courses Involved: ECE 541, ECE 543, ECE 562, ECE 633,
The goal of the study is to investigate the effect of spring stiffness on ride height and aerodynamic balance.
 OptimumDynamics - Case Study Investigating Aerodynamic Distribution Goals Investigate the effect of springs on aerodynamic distribution Select bump stop gap Software OptimumDynamics The case study is broken
OptimumDynamics - Case Study Investigating Aerodynamic Distribution Goals Investigate the effect of springs on aerodynamic distribution Select bump stop gap Software OptimumDynamics The case study is broken
Investigative Technologies and Techniques
 Investigative Technologies and Techniques Using Drones In Accident Investigation (Aerial Photography) Drone used in accident investigation Technical specifications and performance Flat 8 motor configuration
Investigative Technologies and Techniques Using Drones In Accident Investigation (Aerial Photography) Drone used in accident investigation Technical specifications and performance Flat 8 motor configuration
Flight Test Evaluation of C-130H Aircraft Performance with NP2000 Propellers
 Flight Test Evaluation of C-130H Aircraft Performance with NP2000 Propellers Lance Bays Lockheed Martin - C-130 Flight Sciences Telephone: (770) 494-8341 E-Mail: lance.bays@lmco.com Introduction Flight
Flight Test Evaluation of C-130H Aircraft Performance with NP2000 Propellers Lance Bays Lockheed Martin - C-130 Flight Sciences Telephone: (770) 494-8341 E-Mail: lance.bays@lmco.com Introduction Flight
Crash Data Presentation NAPARS Crash Conference
 Crash Data Presentation NAPARS Crash Conference Jeremy Daily, Ph.D., P.E. Associate Professor of Mechanical Engineering 12 September 2014 Portland Maine Consortium Website http://tucrrc.utulsa.edu Credentials
Crash Data Presentation NAPARS Crash Conference Jeremy Daily, Ph.D., P.E. Associate Professor of Mechanical Engineering 12 September 2014 Portland Maine Consortium Website http://tucrrc.utulsa.edu Credentials
Electric Penguin s philosophy:
 UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v 1.1 Penguin BE Electric Unmanned Platform Up to 110 minutes of endurance 2 with 2.8 kg payload 23 liters of payload volume Quick replaceable battery cartridge
UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v 1.1 Penguin BE Electric Unmanned Platform Up to 110 minutes of endurance 2 with 2.8 kg payload 23 liters of payload volume Quick replaceable battery cartridge
SIL, HIL, and Vehicle Fuel Economy Analysis of a Pre- Transmission Parallel PHEV
 EVS27 Barcelona, Spain, November 17-20, 2013 SIL, HIL, and Vehicle Fuel Economy Analysis of a Pre- Transmission Parallel PHEV Jonathan D. Moore and G. Marshall Molen Mississippi State University Jdm833@msstate.edu
EVS27 Barcelona, Spain, November 17-20, 2013 SIL, HIL, and Vehicle Fuel Economy Analysis of a Pre- Transmission Parallel PHEV Jonathan D. Moore and G. Marshall Molen Mississippi State University Jdm833@msstate.edu
PROJECT PROPOSAL FIRE FIGHTING ROBOT CHALLENGE THE ENGINEERS: SUBMITTED TO: SPONSORED BY: Micro Fire Extinguisher
 FIRE FIGHTING ROBOT CHALLENGE Micro Fire Extinguisher PROJECT PROPOSAL SUBMITTED TO: JOHN KENNEDY & R. LAL TUMMALA DESIGN CO. LTD, SAN DIEGO, CA SPONSORED BY: SAN DIEGO STATE UNIVERSITY SENIOR DESIGN PROJECT
FIRE FIGHTING ROBOT CHALLENGE Micro Fire Extinguisher PROJECT PROPOSAL SUBMITTED TO: JOHN KENNEDY & R. LAL TUMMALA DESIGN CO. LTD, SAN DIEGO, CA SPONSORED BY: SAN DIEGO STATE UNIVERSITY SENIOR DESIGN PROJECT
40 EP Gee Bee Y Scale ARF V2 Instruction Manual Specs:
 40 EP Gee Bee Y Scale ARF V2 Instruction Manual Specs: Wing Span: 40" Overall length: 30" Wing area: 306 sq. in Ready to fly weight: 28~32 oz Motor/Engine: Electric: Uranus-28309 brushless outrunner motor,
40 EP Gee Bee Y Scale ARF V2 Instruction Manual Specs: Wing Span: 40" Overall length: 30" Wing area: 306 sq. in Ready to fly weight: 28~32 oz Motor/Engine: Electric: Uranus-28309 brushless outrunner motor,
CRITICAL DESIGN PRESENTATION
 CRITICAL DESIGN PRESENTATION UNIVERSITY OF SOUTH ALABAMA LAUNCH SOCIETY BILL BROWN, BEECHER FAUST, ROCKWELL GARRIDO, CARSON SCHAFF, MICHAEL WIESNETH, MATTHEW WOJCIECHOWSKI ADVISOR: CARLOS MONTALVO MENTOR:
CRITICAL DESIGN PRESENTATION UNIVERSITY OF SOUTH ALABAMA LAUNCH SOCIETY BILL BROWN, BEECHER FAUST, ROCKWELL GARRIDO, CARSON SCHAFF, MICHAEL WIESNETH, MATTHEW WOJCIECHOWSKI ADVISOR: CARLOS MONTALVO MENTOR:
Unmanned Air Vehicles (UAVs): Classification, Legislation and Future applications Presenter: Dr-Ing Dimitrios E. Mazarakos
: Classification, Legislation and Future applications Presenter: Dr-Ing Dimitrios E. Mazarakos") Unmanned Air Vehicles (UAVs): Classification, Legislation and Future applications Presenter: Dr-Ing Dimitrios E. Mazarakos The presenter Dr-Ing Dimitrios E. Mazarakos Dipl. in Mechanical Engineering and
Unmanned Air Vehicles (UAVs): Classification, Legislation and Future applications Presenter: Dr-Ing Dimitrios E. Mazarakos The presenter Dr-Ing Dimitrios E. Mazarakos Dipl. in Mechanical Engineering and