Pothole Tracker. Muhammad Mir. Daniel Chin. Mike Catalano. Bill Quigg Advisor: Professor Ciesielski
|
|
|
- Eugenia Barber
- 6 years ago
- Views:
Transcription
1 Pothole Tracker Muhammad Mir. Daniel Chin. Mike Catalano. Bill Quigg Advisor: Professor Ciesielski



2 Pothole Tracker Muhammad Mir CSE Team 5 Daniel Chin CSE Mike Catalano EE Bill Quigg EE


3
4 Why are Potholes a Problem? Damaging to cars According to AAA pothole damage costs drivers $6.4 billion a year Repairs can range from $50 (wheel alignment) - $500 (alloy wheel) Can average about $2000 in repairs over life span of a car
5 The solution: Pothole Tracker Requirement Analysis Detect potholes using image processing and accelerometer Correctly identify potholes with 80% success rate Correctly map location of pothole to 40 yard radius Store location, size, and depth into database Cost must be under $500
6 Implementations 3D Reconstruction Vibrations Image Processing

7 3D Reconstruction (Lasers) Time of Flight Concept Difficult to generate a controlled matrix of lasers Slight accuracy advantage over sonar implementation Need to cover whole road by rotating a laser Expensive and difficult to implement Time delay issues

8 Laser Product Specifics Product: Lidar Lite Price: $84.55 Error of 1 inch and functions up to 40 meters Shoots only a single beam, therefore we would need to rotate the device on a pivot to scan the entire road Reading time: 20ms (at 35mph with no rotation there is a 1 foot blind spot) the blind spot increases with introduction of rotation and increasing speeds Danger of laser radiation when tampering with device Conclusion: A laser approach is too expensive and would not yield efficient results

9 Vibrations (Accelerometer) Simple to implement Must sustain impact in order to collect data Vertical acceleration is analyzed to discern potholes from other road features Depth of pothole can be extrapolated from measurements stackexchange. com/questions/56238/acceler ometer-data-smoothingfiltering-pothole-detection

10 Image Processing Averages between 80-85% accuracy Can be low cost for testing purposes Complicated computations required to manipulate image Be able to gather data without needing to run over the pothole
11 Block Diagram Pothole Detection (Raspberry Pi) Database Daniel Chin Muhammad Mir Image Processing Power Internet Connection Data Storage Daniel & Muhammad Mike Catalano Bill Quigg Wireless Connection GPS User Interface Sensors Sonar Camera Acceleromet er Internet Connection Webpage

12 Raspberry Pi 2 Model B 900 MHz quad-core ARM Cortex-A7 1 GB RAM 4 USB ports WiFi USB dongle Camera interface HDMI Interface Coded in C/C++

13 Power Power Source - Cigarette lighter adapter (5V) All components operate on 5V or 3.3V Raspberry Pi has 4 USB ports (5V) and 3.3V/5V supply pins The GPS, Wifi Dongle, Accelerometer, Camera, and Pi itself will all consume power We plan on supplying all the power to the Raspberry Pi and then feeding it to the components attached to the Pi GPS (25mA), Dongle (70mA), Accelerometer (140uA), Camera (250mA), Pi (600mA) Max Power = (600mA+250mA+70mA+25mA+140uA)*5V = 945.1mA*5V = 4.73W The car outlet can source 4.73W and the Pi will function safely at that wattage
 By the pythagorean theorem max error of GPS is 51 feet Max")
14 GPS - Adafruit Ultimate GPS GPS location update Quick GPS location lock GPS L1 Frequency: MHz Inputs 12 Channels Antenna Gives latitude and longitude to 4 decimals of precision (max error for both lat and long is 36 feet) By the pythagorean theorem max error of GPS is 51 feet Max update rate: 10 Hz 5ft error due to 10 Hz update rate when driving 35mph Satellite Signal Raspberry Pi Record Location Command Outputs Location sent to Raspberry Pi
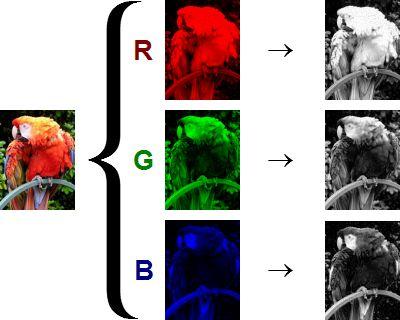
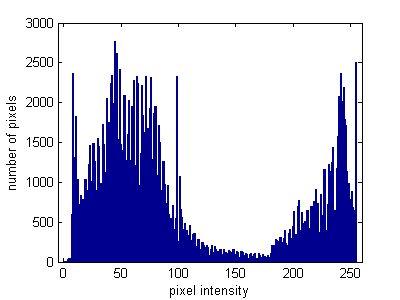
15 Image Processing Specifics Convert image from RGB to gray scale(black and white pixels) This makes the image into a binary one(each pixel is a 0 or 1 based on whether the value is greater or less than the threshold(t) Use Otsu s method for calculating threshold(t) Sort through and set threshold(t) such that background and potholes are separated The resulting image displays the pothole in white and the background in black Use edge detection to map pothole(size, depth)
16
17 Internet Connections (WiFi/Ethernet) Fast and reliable connection Send the processed information along with GPS location to database Display database information to web page WiFi USB n Dongle 150 Mbps max throughput UMass Wireless Network

18 Camera Price: ~$30 Camera resolution must be high enough to identify potholes The resolution cannot be too high as processing time will suffer Minimum shutter speed Possibly mount to bumper or roof of car 5MP, supports image resolutions up to 1080p

19 Accelerometer Product: Triple-Axis Accelerometer - ADXL345 Price: $4.95 Acceleration range of ± 4g Typical driving conditions don t exceed ± 3 Low power consumption - 3.3V, 140uA


 to a")

20 The Database/Webpage Wirelessly transmit data(location, size, depth) to a database Be able to view data on a webpage Display map with pothole locations
21 Problems Depth from image processing Wireless may not be available at all times Store data until WiFi is available
22 MDR Deliverable Processed image and algorithms Parts (Raspberry Pi, wireless, gps, camera, accelerometer) Database for storing pothole specs will be set up
23 Questions?
24
Table of Contents. Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.
 Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.") March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
Transportation Technology Used in Trucks
 Transportation Technology has evolved significantly in United States, not only to provide Operational Efficiencies and Cost savings but also to address Safety. While in-vehicle technologies can produce
Transportation Technology has evolved significantly in United States, not only to provide Operational Efficiencies and Cost savings but also to address Safety. While in-vehicle technologies can produce
UNIVERSITÉ DE MONCTON FACULTÉ D INGÉNIERIE. Moncton, NB, Canada PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY
 FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
SentryGOLD Fully-Automated Fuel Management System
 SentryGOLD Fully-Automated Fuel Management System Trak s SentryGOLD Fully Automated Fuel Management System provides the highest level of security for your fleet and the highest level of accuracy for your
SentryGOLD Fully-Automated Fuel Management System Trak s SentryGOLD Fully Automated Fuel Management System provides the highest level of security for your fleet and the highest level of accuracy for your
Vehicle Diagnostic Logging Device
 UCCS SENIOR DESIGN Vehicle Diagnostic Logging Device Design Requirements Specification Prepared by Mackenzie Lowrance, Nick Hermanson, and Whitney Watson Sponsor: Tyson Hartshorn with New Planet Technologies
UCCS SENIOR DESIGN Vehicle Diagnostic Logging Device Design Requirements Specification Prepared by Mackenzie Lowrance, Nick Hermanson, and Whitney Watson Sponsor: Tyson Hartshorn with New Planet Technologies
REDUCING THE OCCURRENCES AND IMPACT OF FREIGHT TRAIN DERAILMENTS
 REDUCING THE OCCURRENCES AND IMPACT OF FREIGHT TRAIN DERAILMENTS D-Rail Final Workshop 12 th November - Stockholm Monitoring and supervision concepts and techniques for derailments investigation Antonella
REDUCING THE OCCURRENCES AND IMPACT OF FREIGHT TRAIN DERAILMENTS D-Rail Final Workshop 12 th November - Stockholm Monitoring and supervision concepts and techniques for derailments investigation Antonella
INTRODUCTION Team Composition Electrical System
 IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
An Autonomous Braking System of Cars Using Artificial Neural Network
 I J C T A, 9(9), 2016, pp. 3665-3670 International Science Press An Autonomous Braking System of Cars Using Artificial Neural Network P. Pavul Arockiyaraj and P.K. Mani ABSTRACT The main aim is to develop
I J C T A, 9(9), 2016, pp. 3665-3670 International Science Press An Autonomous Braking System of Cars Using Artificial Neural Network P. Pavul Arockiyaraj and P.K. Mani ABSTRACT The main aim is to develop
NASA University Student Launch Initiative (Sensor Payload) Final Design Review. Payload Name: G.A.M.B.L.S.
 Final Design Review. Payload Name: G.A.M.B.L.S.") NASA University Student Launch Initiative (Sensor Payload) Final Design Review Payload Name: G.A.M.B.L.S. CPE496-01 Computer Engineering Design II Electrical and Computer Engineering The University of
NASA University Student Launch Initiative (Sensor Payload) Final Design Review Payload Name: G.A.M.B.L.S. CPE496-01 Computer Engineering Design II Electrical and Computer Engineering The University of
Virginia Tech Research Center Arlington, Virginia, USA. PPT slides will be available at
 SMART BUILDINGS & INFRASTRUCTURES Invited Talk Professor Saifur Rahman Virginia Tech Advanced Research Institute Virginia, USA IIT Delhi New Delhi, India, 02 June 2016 Virginia Tech Research Center Arlington,
SMART BUILDINGS & INFRASTRUCTURES Invited Talk Professor Saifur Rahman Virginia Tech Advanced Research Institute Virginia, USA IIT Delhi New Delhi, India, 02 June 2016 Virginia Tech Research Center Arlington,
NAU Robosub. Project Proposal
 NAU Robosub Project Proposal Mansour Alajemi, Feras Aldawsari, Curtis Green, Daniel Heaton, Wenkai Ren, William Ritchie, Bethany Sprinkle, Daniel Tkachenko December 09, 2015 Bethany Overview Introduction
NAU Robosub Project Proposal Mansour Alajemi, Feras Aldawsari, Curtis Green, Daniel Heaton, Wenkai Ren, William Ritchie, Bethany Sprinkle, Daniel Tkachenko December 09, 2015 Bethany Overview Introduction
Journal of Emerging Trends in Computing and Information Sciences
 Pothole Detection Using Android Smartphone with a Video Camera 1 Youngtae Jo *, 2 Seungki Ryu 1 Korea Institute of Civil Engineering and Building Technology, Korea E-mail: 1 ytjoe@kict.re.kr, 2 skryu@kict.re.kr
Pothole Detection Using Android Smartphone with a Video Camera 1 Youngtae Jo *, 2 Seungki Ryu 1 Korea Institute of Civil Engineering and Building Technology, Korea E-mail: 1 ytjoe@kict.re.kr, 2 skryu@kict.re.kr
DELHI TECHNOLOGICAL UNIVERSITY TEAM RIPPLE Design Report
 DELHI TECHNOLOGICAL UNIVERSITY TEAM RIPPLE Design Report May 16th, 2018 Faculty Advisor Statement: I hereby certify that the development of vehicle, described in this report has been equivalent to the
DELHI TECHNOLOGICAL UNIVERSITY TEAM RIPPLE Design Report May 16th, 2018 Faculty Advisor Statement: I hereby certify that the development of vehicle, described in this report has been equivalent to the
Autonomous Ground Vehicle
 Autonomous Ground Vehicle Senior Design Project EE Anshul Tandon Brandon Nason Brian Aidoo Eric Leefe Advisors: ME Donald Lee Hardee Ivan Bolanos Wilfredo Caceres Mr. Bryan Audiffred Dr. Michael C. Murphy
Autonomous Ground Vehicle Senior Design Project EE Anshul Tandon Brandon Nason Brian Aidoo Eric Leefe Advisors: ME Donald Lee Hardee Ivan Bolanos Wilfredo Caceres Mr. Bryan Audiffred Dr. Michael C. Murphy
Detection of rash driving on highways
 Detection of rash driving on highways 1 Ladly Patel, 2 Kumar Abhishek Gaurav, 3 Dr. Revathi V 1,2 Mtech. CSE (Big Data & IoT), 3 Associate Professor Dayananda Sagar University, Bengaluru, India Abstract-
Detection of rash driving on highways 1 Ladly Patel, 2 Kumar Abhishek Gaurav, 3 Dr. Revathi V 1,2 Mtech. CSE (Big Data & IoT), 3 Associate Professor Dayananda Sagar University, Bengaluru, India Abstract-
Aircraft 1. Gimbal and Camera 9. Link Button 2. Downward Vision System
 MAVIC PRO Quick Start Guide V1.2 Aircraft The DJITM MAVICTM Pro is DJI's smallest flying camera, featuring a fully stabilized camera, Intelligent Flight Modes and Obstacle Avoidance inside a revolutionary
MAVIC PRO Quick Start Guide V1.2 Aircraft The DJITM MAVICTM Pro is DJI's smallest flying camera, featuring a fully stabilized camera, Intelligent Flight Modes and Obstacle Avoidance inside a revolutionary
Autonomous Unmanned Aerial Systems 1. ABSTRACT
 1. ABSTRACT Zeppelin FC 26, a team formed in 2014, has undergone exponential growth. We have delved into diverse and challenging endeavors, ranging from systems integration to design and development of
1. ABSTRACT Zeppelin FC 26, a team formed in 2014, has undergone exponential growth. We have delved into diverse and challenging endeavors, ranging from systems integration to design and development of
Car Technologies Stanford and CMU
 Car Technologies Stanford and CMU Stanford Racing Stanford Racing s entry was dubbed Junior in honor of Leland Stanford Jr. Team led by Sebastian Thrun and Mike Montemerlo (from SAIL) VW Passat Primary
Car Technologies Stanford and CMU Stanford Racing Stanford Racing s entry was dubbed Junior in honor of Leland Stanford Jr. Team led by Sebastian Thrun and Mike Montemerlo (from SAIL) VW Passat Primary
UAV KF-1 helicopter. CopterCam UAV KF-1 helicopter specification
 UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
Mercury VTOL suas Testing and Measurement Plan
 Mercury VTOL suas Testing and Measurement Plan Introduction Mercury is a small VTOL (Vertical Take-Off and Landing) aircraft that is building off of a quadrotor design. The end goal of the project is for
Mercury VTOL suas Testing and Measurement Plan Introduction Mercury is a small VTOL (Vertical Take-Off and Landing) aircraft that is building off of a quadrotor design. The end goal of the project is for
LiDAR Teach-In OSRAM Licht AG June 20, 2018 Munich Light is OSRAM
 www.osram.com LiDAR Teach-In June 20, 2018 Munich Light is OSRAM Agenda Introduction Autonomous driving LIDAR technology deep-dive LiDAR@OS: Emitter technologies Outlook LiDAR Tech Teach-In June 20, 2018
www.osram.com LiDAR Teach-In June 20, 2018 Munich Light is OSRAM Agenda Introduction Autonomous driving LIDAR technology deep-dive LiDAR@OS: Emitter technologies Outlook LiDAR Tech Teach-In June 20, 2018
GCAT. University of Michigan-Dearborn
 GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
Citi's 2016 Car of the Future Symposium
 Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
Reciprocating Compressor Installation and Validation
 Reciprocating Compressor Installation and Validation MSD II - 11452 John Blamer (ME) Team Leader Promit Bagchi (ME) Lead Engineer Elliot Kendall (ME) Hydronics Engineer Matthias Purvis (ME) Operations
Reciprocating Compressor Installation and Validation MSD II - 11452 John Blamer (ME) Team Leader Promit Bagchi (ME) Lead Engineer Elliot Kendall (ME) Hydronics Engineer Matthias Purvis (ME) Operations
NHP SAFETY REFERENCE GUIDE
 4 NHP SAFETY REFERENCE GUIDE CONTENTS SAFETY TECHNOLOGY Risk Reduction Options Permanent Fixed Guard 4-02 Interlocked Guard: 4-03 Limit Switches 4-08 Presence Sensing Technology 4-09 Safety Laser Scanners
4 NHP SAFETY REFERENCE GUIDE CONTENTS SAFETY TECHNOLOGY Risk Reduction Options Permanent Fixed Guard 4-02 Interlocked Guard: 4-03 Limit Switches 4-08 Presence Sensing Technology 4-09 Safety Laser Scanners
Critical Design Report Presentation. Triton. Team 11 February 28, Department of Electrical and Computer Engineering
 Critical Design Report Presentation Triton Team 11 February 28, 2017 Introduction No economical solution for extended underwater monitoring Ecologists from UMass Amherst interested in studying spawning
Critical Design Report Presentation Triton Team 11 February 28, 2017 Introduction No economical solution for extended underwater monitoring Ecologists from UMass Amherst interested in studying spawning
BY HOEYCOMB AEROSPACE TECHNOLOGIES. HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV
 BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
(Let s first discuss in detail about Electric circuit of a kart and then evaluate the possible conditions for fire accidents.)
") Automatic Fire Extinguisher Revan Kumar D 1 Karthik P 2 B.E 4 th year Mechanical Engineering,R.M.K Engineering College I. INTRODUCTION The rapid depletion of existing fossil fuel sources and the environmental
Automatic Fire Extinguisher Revan Kumar D 1 Karthik P 2 B.E 4 th year Mechanical Engineering,R.M.K Engineering College I. INTRODUCTION The rapid depletion of existing fossil fuel sources and the environmental
Senior Design Project Topics
 Senior Design Project Topics with Risk & Impact Ratings EECE401 Senior Design I Dr. Charles Kim Department of Electrical and Computer Engineering Howard University Fall 2010 1 Design Project Topics Northrop
Senior Design Project Topics with Risk & Impact Ratings EECE401 Senior Design I Dr. Charles Kim Department of Electrical and Computer Engineering Howard University Fall 2010 1 Design Project Topics Northrop
CRSM: Crowdsourcing based Road Surface Monitoring
 CRSM: Crowdsourcing based Road Surface Monitoring Kongyang Chen 1, Mingming Lu 2, Guang Tan 1, and Jie Wu 3 1SIAT, Chinese Academy of Sciences, 2 Central South University 3Temple University Nov. 15 th,
CRSM: Crowdsourcing based Road Surface Monitoring Kongyang Chen 1, Mingming Lu 2, Guang Tan 1, and Jie Wu 3 1SIAT, Chinese Academy of Sciences, 2 Central South University 3Temple University Nov. 15 th,
Closing Sale Prices. AmigoBot Pioneer 3-DX Pioneer 3-AT Pioneer LX Pioneer Manipulator PeopleBot PowerBot Seekur Jr
 10 Columbia Drive Amherst, NH 03031 USA T. +1.603.881.7960 F. +1.603.881.3818 www.mobilerobots.com Closing Prices 90 Day Warranty on all s Limited Quantities Available Models AmigoBot Pioneer 3-DX Pioneer
10 Columbia Drive Amherst, NH 03031 USA T. +1.603.881.7960 F. +1.603.881.3818 www.mobilerobots.com Closing Prices 90 Day Warranty on all s Limited Quantities Available Models AmigoBot Pioneer 3-DX Pioneer
WingtraOne Technical Specifications
 WingtraOne Technical Specifications wingtra.com The all-in-one drone: large coverage, high resolution and accuracy WingtraOne Resolution Accuracy Coverage down to 0.7 cm/px (0.3 in/px) GSD down to 1 cm
WingtraOne Technical Specifications wingtra.com The all-in-one drone: large coverage, high resolution and accuracy WingtraOne Resolution Accuracy Coverage down to 0.7 cm/px (0.3 in/px) GSD down to 1 cm
AMADEO i-lock Your innovative key card system for hotels
 AMADEO i-lock Your innovative key card system for hotels TECHNICAL DATA SHEET AMADEO i-lock A PERFECT FIT FOR ANY HOTEL Easy upgrade, fits on existing mortise locks without door rework Flexible design,
AMADEO i-lock Your innovative key card system for hotels TECHNICAL DATA SHEET AMADEO i-lock A PERFECT FIT FOR ANY HOTEL Easy upgrade, fits on existing mortise locks without door rework Flexible design,
Supplementary file related to the paper titled On the Design and Deployment of RFID Assisted Navigation Systems for VANET
 Supplementary file related to the paper titled On the Design and Deployment of RFID Assisted Navigation Systems for VANET SUPPLEMENTARY FILE RELATED TO SECTION 3: RFID ASSISTED NAVIGATION SYS- TEM MODEL
Supplementary file related to the paper titled On the Design and Deployment of RFID Assisted Navigation Systems for VANET SUPPLEMENTARY FILE RELATED TO SECTION 3: RFID ASSISTED NAVIGATION SYS- TEM MODEL
Freescale Cup Competition. Abdulahi Abu Amber Baruffa Mike Diep Xinya Zhao. Author: Amber Baruffa
 Freescale Cup Competition The Freescale Cup is a global competition where student teams build, program, and race a model car around a track for speed. Abdulahi Abu Amber Baruffa Mike Diep Xinya Zhao The
Freescale Cup Competition The Freescale Cup is a global competition where student teams build, program, and race a model car around a track for speed. Abdulahi Abu Amber Baruffa Mike Diep Xinya Zhao The
MAVIC 2 PRO. Quick Start Guide V1.2
 MAVIC 2 PRO Quick Start Guide V1.2 Aircraft The DJI TM MAVIC TM 2 Pro features omnidirectional Vision Systems and Infrared Sensing Systems*, and a fully stabilized 3-axis gimbal with a 1" CMOS sensor camera
MAVIC 2 PRO Quick Start Guide V1.2 Aircraft The DJI TM MAVIC TM 2 Pro features omnidirectional Vision Systems and Infrared Sensing Systems*, and a fully stabilized 3-axis gimbal with a 1" CMOS sensor camera
K A N Z A ASHEET T A D T - 7 9
 DATA S H E E T KANZA-77 T-79 COMPANY OVERVIEW Ainstein is the cutting-edge automotive radar sensor provider for self-driving industrial trucks, tractors, specialty vehicles, and the emerging autonomous
DATA S H E E T KANZA-77 T-79 COMPANY OVERVIEW Ainstein is the cutting-edge automotive radar sensor provider for self-driving industrial trucks, tractors, specialty vehicles, and the emerging autonomous
To put integrity before opportunity To be passionate and persistent To encourage individuals to rise to the occasion
 SignalQuest, based in New Hampshire, USA, designs and manufactures electronic sensors that measure tilt angle, acceleration, shock, vibration and movement as well as application specific inertial measurement
SignalQuest, based in New Hampshire, USA, designs and manufactures electronic sensors that measure tilt angle, acceleration, shock, vibration and movement as well as application specific inertial measurement
Owners Manual for TPMS plus GPS
 To ensure correct operation and service please read these instructions before installing and operating the TPMS feature of the TPMS/GPS unit. Owners Manual for TPMS plus GPS TABLE OF CONTENTS TIRE PRESSURE
To ensure correct operation and service please read these instructions before installing and operating the TPMS feature of the TPMS/GPS unit. Owners Manual for TPMS plus GPS TABLE OF CONTENTS TIRE PRESSURE
Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination
: An Autonomous Vessel for Data Acquisition and Dissemination") Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination AUV Lab @ MIT Sea Grant Alon Yaari, Michael Sacarny, Michael DeFilippo, Husayn Karimi, Paris Perdikaris MOOS-DAWG 2015
Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination AUV Lab @ MIT Sea Grant Alon Yaari, Michael Sacarny, Michael DeFilippo, Husayn Karimi, Paris Perdikaris MOOS-DAWG 2015
VEX Classroom Lab Kit to PLTW VEX POE Conversion Kit
 Published: 03/22/20 Picture Part Description Number 275-88 Rack Gearbox Bracket (2-pack): Combines with the VEX linear slides & Rack Gears to create a linear actuator. Quantity 276-096 Linear Slide (2-pack):
Published: 03/22/20 Picture Part Description Number 275-88 Rack Gearbox Bracket (2-pack): Combines with the VEX linear slides & Rack Gears to create a linear actuator. Quantity 276-096 Linear Slide (2-pack):
MAVIC AIR. Quick Start Guide V1.2
 MAVIC AIR Quick Start Guide V1.2 Aircraft The DJI TM MAVIC TM Air features a new folding design and a fully stabilized 3-axis gimbal camera capable of shooting 4K video and 12 megapixel photos. DJI signature
MAVIC AIR Quick Start Guide V1.2 Aircraft The DJI TM MAVIC TM Air features a new folding design and a fully stabilized 3-axis gimbal camera capable of shooting 4K video and 12 megapixel photos. DJI signature
NJAV New Jersey Autonomous Vehicle
 The Autonomous Vehicle Team from TCNJ Presents: NJAV New Jersey Autonomous Vehicle Team Members Mark Adkins, Cynthia De Rama, Jodie Hicks, Kristen Izganics, Christopher Macock, Stephen Saudargas, Brett
The Autonomous Vehicle Team from TCNJ Presents: NJAV New Jersey Autonomous Vehicle Team Members Mark Adkins, Cynthia De Rama, Jodie Hicks, Kristen Izganics, Christopher Macock, Stephen Saudargas, Brett
2016 IGVC Design Report Submitted: May 13, 2016
 2016 IGVC Design Report Submitted: May 13, 2016 I certify that the design and engineering of the vehicle by the current student team has been significant and equivalent to what might be awarded credit
2016 IGVC Design Report Submitted: May 13, 2016 I certify that the design and engineering of the vehicle by the current student team has been significant and equivalent to what might be awarded credit
Mitsubishi Electric Launches Mobile Mapping System for Overseas Market
 MITSUBISHI ELECTRIC CORPORATION PUBLIC RELATIONS DIVISION 7-3, Marunouchi 2-chome, Chiyoda-ku, Tokyo, 100-8310 Japan FOR IMMEDIATE RELEASE No. 3055 Customer Inquiries IT Solution Marketing Department IT
MITSUBISHI ELECTRIC CORPORATION PUBLIC RELATIONS DIVISION 7-3, Marunouchi 2-chome, Chiyoda-ku, Tokyo, 100-8310 Japan FOR IMMEDIATE RELEASE No. 3055 Customer Inquiries IT Solution Marketing Department IT
SMART ROBOT USING RASPBERRY PI AND NODEMCU
 SMART ROBOT USING RASPBERRY PI AND NODEMCU Mr. Rahul R Moorkath 1, Mr. Narshi P Parmar 2, Mr. Piyush J Prajapati 3, Mr. Milan A Goswami 4, Prof. Rajnikant P Sandhani 5 1,2,3,4 Student, Department of E&C
SMART ROBOT USING RASPBERRY PI AND NODEMCU Mr. Rahul R Moorkath 1, Mr. Narshi P Parmar 2, Mr. Piyush J Prajapati 3, Mr. Milan A Goswami 4, Prof. Rajnikant P Sandhani 5 1,2,3,4 Student, Department of E&C
UHABS-5 Mission Zeppelin
 UHABS-5 Mission Zeppelin Team Members: Likeke Aipa, Drex Arine, Andrew Bui, Karen Calaro, Kanekahekilinuinanaueikalani Clark, Ka Chon Liu, Cyrus Noveloso, Reagan Paz, Yun Feng Tan, Jake Torigoe, Emanuel
UHABS-5 Mission Zeppelin Team Members: Likeke Aipa, Drex Arine, Andrew Bui, Karen Calaro, Kanekahekilinuinanaueikalani Clark, Ka Chon Liu, Cyrus Noveloso, Reagan Paz, Yun Feng Tan, Jake Torigoe, Emanuel
Mellivora: A Battery Experiment
 Mellivora: A Battery Experiment Overview Team Introduction Problem Our Approach Technological Innovations Design Alternatives Design Specifications Block Diagram Individual Subsystems MDR Deliverables
Mellivora: A Battery Experiment Overview Team Introduction Problem Our Approach Technological Innovations Design Alternatives Design Specifications Block Diagram Individual Subsystems MDR Deliverables
DRONE PRODUCTS LINEUP
 DATA S H E E T DRONE PRODUCTS LINEUP COMPANY OVERVIEW Ainstein is the cutting-edge UAV/UAS radar sensor and advanced flight controller provider for autonomous and beyond visual line of sight (BVLOS) flight
DATA S H E E T DRONE PRODUCTS LINEUP COMPANY OVERVIEW Ainstein is the cutting-edge UAV/UAS radar sensor and advanced flight controller provider for autonomous and beyond visual line of sight (BVLOS) flight
LTU Challenger. TEAM MEMBERS: Andrey Chernolutskiy Vincent Shih-Nung Chen. Faculty Advisor's Statement:
 LTU Challenger TEAM MEMBERS: Andrey Chernolutskiy Vincent Shih-Nung Chen Faculty Advisor's Statement: The work that the LTU Challenger student team performed with regards to design and implementation was
LTU Challenger TEAM MEMBERS: Andrey Chernolutskiy Vincent Shih-Nung Chen Faculty Advisor's Statement: The work that the LTU Challenger student team performed with regards to design and implementation was
Selection and Installation of Vibration Sensors
 FAQ 09/2016 Selection and Installation of Vibration Sensors SIPLUS CMS2000, SIPLUS CMS1200 SM1281 https://support.industry.siemens.com/cs/ww/en/view/109740202 This entry is from the Siemens Industry Online
FAQ 09/2016 Selection and Installation of Vibration Sensors SIPLUS CMS2000, SIPLUS CMS1200 SM1281 https://support.industry.siemens.com/cs/ww/en/view/109740202 This entry is from the Siemens Industry Online
ADLATUS CR700. Fully autonomous cleaning robot system
 Fully autonomous cleaning robot system 1 DESIGNED TO SERVE MISSION Designed to serve is the mission of ADLATUS Robotics GmbH. The digitization and globalization push the change in the service sector of
Fully autonomous cleaning robot system 1 DESIGNED TO SERVE MISSION Designed to serve is the mission of ADLATUS Robotics GmbH. The digitization and globalization push the change in the service sector of
Caliber: Road Quality Profiling
 Caliber: Road Quality Profiling Capstone Design Specification Samuel Quintana John Spencer James Uttaro Damien Hobday CSc 59866 : Senior Design Professor: Jie Wei Brief Team Caliber wants to map the quality
Caliber: Road Quality Profiling Capstone Design Specification Samuel Quintana John Spencer James Uttaro Damien Hobday CSc 59866 : Senior Design Professor: Jie Wei Brief Team Caliber wants to map the quality
Design of the Target Injection and Tracking Experimental System
 Design of the Target Injection and Tracking Experimental System Ron Petzoldt, Neil Alexander, Gottfried Besenbruch, Mike Cherry, Walt Egli, Dan Goodin, and Chuck Gibson ARIES Meeting Princeton, New Jersey
Design of the Target Injection and Tracking Experimental System Ron Petzoldt, Neil Alexander, Gottfried Besenbruch, Mike Cherry, Walt Egli, Dan Goodin, and Chuck Gibson ARIES Meeting Princeton, New Jersey
Formation Flying Experiments on the Orion-Emerald Mission. Introduction
 Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Based on the findings, a preventive maintenance strategy can be prepared for the equipment in order to increase reliability and reduce costs.
 What is ABB MACHsense-R? ABB MACHsense-R is a service for monitoring the condition of motors and generators which is provided by ABB Local Service Centers. It is a remote monitoring service using sensors
What is ABB MACHsense-R? ABB MACHsense-R is a service for monitoring the condition of motors and generators which is provided by ABB Local Service Centers. It is a remote monitoring service using sensors
SOKAR FPV DRONE. Quick Start Manual SkyRC Technology Co., Ltd. All Rights Reserved. Version
 SOKAR FPV DRONE Quick Start Manual Manufactured by SKYRC TECHNOLOGY CO., LTD. www.skyrc.com 2015 SkyRC Technology Co., Ltd. All Rights Reserved. Version 1.0 7504-0694-01 RoHS TABLE OF CONTENTS INTRODUCTION
SOKAR FPV DRONE Quick Start Manual Manufactured by SKYRC TECHNOLOGY CO., LTD. www.skyrc.com 2015 SkyRC Technology Co., Ltd. All Rights Reserved. Version 1.0 7504-0694-01 RoHS TABLE OF CONTENTS INTRODUCTION
SAE AERO DESIGN PROJECT PROPULSION & TELEMETRY SYSTEMS UNION COLLEGE FLIGHT CLUB. Ervin Meneses and Joseph Laub Advisor John Spinelli,Ph.
 SAE AERO DESIGN PROJECT PROPULSION & TELEMETRY SYSTEMS UNION COLLEGE FLIGHT CLUB Ervin Meneses and Joseph Laub Advisor John Spinelli,Ph.D SAE Aero Design Team Society of Automotive Engineers Team of five,
SAE AERO DESIGN PROJECT PROPULSION & TELEMETRY SYSTEMS UNION COLLEGE FLIGHT CLUB Ervin Meneses and Joseph Laub Advisor John Spinelli,Ph.D SAE Aero Design Team Society of Automotive Engineers Team of five,
DOBBY Pocket Drone. Quick Start Guide V2.1
 DOBBY Pocket Drone Quick Start Guide V2.1 Aircraft The DOBBY Pocket Drone is pocket-sized and foldable flying camera for everyone, featuring Auto Pull-away Short Video, Target Tracking, Orbit shooting
DOBBY Pocket Drone Quick Start Guide V2.1 Aircraft The DOBBY Pocket Drone is pocket-sized and foldable flying camera for everyone, featuring Auto Pull-away Short Video, Target Tracking, Orbit shooting
The Lug-n-Go. Team #16: Anika Manzo ( ammanzo2), Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018
, Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018") The Lug-n-Go Team #16: Anika Manzo ( ammanzo2), Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018 TA: Mickey Zhang Introduction 1.1 Problem Statement and Objective
The Lug-n-Go Team #16: Anika Manzo ( ammanzo2), Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018 TA: Mickey Zhang Introduction 1.1 Problem Statement and Objective
arxiv: v1 [cs.cy] 17 Nov 2017
![arxiv: v1 [cs.cy] 17 Nov 2017](/thumbs/71/66124418.jpg "arxiv: v1 [cs.cy] 17 Nov 2017") Instant Accident Reporting and Crowdsensed Road Condition Analytics for Smart Cities arxiv:1711.06710v1 [cs.cy] 17 Nov 2017 Ashkan Yousefpour, Caleb Fung, Tam Nguyen, David Hong, Daniel Zhang Advanced
Instant Accident Reporting and Crowdsensed Road Condition Analytics for Smart Cities arxiv:1711.06710v1 [cs.cy] 17 Nov 2017 Ashkan Yousefpour, Caleb Fung, Tam Nguyen, David Hong, Daniel Zhang Advanced
Crash Data Presentation NAPARS Crash Conference
 Crash Data Presentation NAPARS Crash Conference Jeremy Daily, Ph.D., P.E. Associate Professor of Mechanical Engineering 12 September 2014 Portland Maine Consortium Website http://tucrrc.utulsa.edu Credentials
Crash Data Presentation NAPARS Crash Conference Jeremy Daily, Ph.D., P.E. Associate Professor of Mechanical Engineering 12 September 2014 Portland Maine Consortium Website http://tucrrc.utulsa.edu Credentials
Collecting Vehicle Trajectory Information by Smartphones when GPS Signal is Lost
 Collecting Vehicle Trajectory Information by Smartphones when GPS Signal is Lost Mecit Cetin, PhD Department of Civil and Environmental Engineering Tamer Nadeem, PhD Computer Science Ilyas Ustun, Abdulla
Collecting Vehicle Trajectory Information by Smartphones when GPS Signal is Lost Mecit Cetin, PhD Department of Civil and Environmental Engineering Tamer Nadeem, PhD Computer Science Ilyas Ustun, Abdulla
Club Capra- Minotaurus Design Report
 Table of content Introduction... 3 Team... 3 Cost... 4 Mechanical design... 4 Structure of Minotaurus... 5 Drive train... 6 Electronics... 7 Batteries... 7 Power supply... 7 System signal processing...
Table of content Introduction... 3 Team... 3 Cost... 4 Mechanical design... 4 Structure of Minotaurus... 5 Drive train... 6 Electronics... 7 Batteries... 7 Power supply... 7 System signal processing...
DD2-PRO+ Gps enabled Datalogger & display system mm (W) x 90mm (H) x 28mm (D) Datalogger Front 109mm (W) x 35mm (H) x 121mm (D) Datalogger Back
 x 90mm (H) x 28mm (D) Datalogger Front 109mm (W) x 35mm (H) x 121mm (D) Datalogger Back") DD2-PRO+ Gps enabled Datalogger & display system PRO Display - 160.4mm (W) x 90mm (H) x 28mm (D) Datalogger Front 109mm (W) x 35mm (H) x 121mm (D) Datalogger Back Feature Summary Display Programmable Speed
DD2-PRO+ Gps enabled Datalogger & display system PRO Display - 160.4mm (W) x 90mm (H) x 28mm (D) Datalogger Front 109mm (W) x 35mm (H) x 121mm (D) Datalogger Back Feature Summary Display Programmable Speed
ULTRASONIC TESTING OF RAILWAY AXLES WITH PHASED ARRAY TECHNIQUE EXPERIENCES DURING OPERATION
 ULTRASONIC TESTING OF RAILWAY AXLES WITH PHASED ARRAY TECHNIQUE EXPERIENCES DURING OPERATION W. Hansen 1, H. Hintze 2 1 GE Inspection Technologies, Hürth, Germany; 2 Deutsche Bahn AG, Kirchmöser; Germany
ULTRASONIC TESTING OF RAILWAY AXLES WITH PHASED ARRAY TECHNIQUE EXPERIENCES DURING OPERATION W. Hansen 1, H. Hintze 2 1 GE Inspection Technologies, Hürth, Germany; 2 Deutsche Bahn AG, Kirchmöser; Germany
Laser Tag Droid. Jake Hamill, Martin Litwiller, Christian Topete ECE 445 Project Proposal
 Laser Tag Droid Jake Hamill, Martin Litwiller, Christian Topete ECE 445 Project Proposal 1. Introduction 1.1 Objective Our proposed project is to design, build, and test a remote control laser tag droid
Laser Tag Droid Jake Hamill, Martin Litwiller, Christian Topete ECE 445 Project Proposal 1. Introduction 1.1 Objective Our proposed project is to design, build, and test a remote control laser tag droid
Functional Algorithm for Automated Pedestrian Collision Avoidance System
 Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
SOKAR FPV DRONE. Quick Start Manual SkyRC Technology Co., Ltd. All Rights Reserved. Version
 SOKAR FPV DRE Quick Start Manual Manufactured by SKYRC TECHNOLOGY CO., LTD. www.skyrc.com 2015 SkyRC Technology Co., Ltd. All Rights Reserved. Version 2.0 7504-0694-02 RoHS TABLE OF CTENTS INTRODUCTI INTRODUCTI
SOKAR FPV DRE Quick Start Manual Manufactured by SKYRC TECHNOLOGY CO., LTD. www.skyrc.com 2015 SkyRC Technology Co., Ltd. All Rights Reserved. Version 2.0 7504-0694-02 RoHS TABLE OF CTENTS INTRODUCTI INTRODUCTI
LOOKING FOR THE ULTIMATE ADVERTISING & PROMOTIONAL TOOL FOR YOUR BUSINESS?
 LOOKING FOR THE ULTIMATE ADVERTISING & PROMOTIONAL TOOL FOR YOUR BUSINESS? BLUE PRINT Led Chipset: VECTR LED 10mm DIP Build Date: May, 2014 Models: XA & XVP Series Manufacturer: 8 Arms Pty Ltd Made in:
LOOKING FOR THE ULTIMATE ADVERTISING & PROMOTIONAL TOOL FOR YOUR BUSINESS? BLUE PRINT Led Chipset: VECTR LED 10mm DIP Build Date: May, 2014 Models: XA & XVP Series Manufacturer: 8 Arms Pty Ltd Made in:
2015 The MathWorks, Inc. 1
 2015 The MathWorks, Inc. 1 [Subtrack 2] Vehicle Dynamics Blockset 소개 김종헌부장 2015 The MathWorks, Inc. 2 Agenda What is Vehicle Dynamics Blockset? How can I use it? 3 Agenda What is Vehicle Dynamics Blockset?
2015 The MathWorks, Inc. 1 [Subtrack 2] Vehicle Dynamics Blockset 소개 김종헌부장 2015 The MathWorks, Inc. 2 Agenda What is Vehicle Dynamics Blockset? How can I use it? 3 Agenda What is Vehicle Dynamics Blockset?
MiR Hook. Technical Documentation
 MiR Hook Technical Documentation Version 1.7 Software release 1.7 Release date: 10.11.2016 Table of contents 1 Introduction...3 2 The MiR Hook hardware...3 3 Trolley specifications...4 4 Space requirements...5
MiR Hook Technical Documentation Version 1.7 Software release 1.7 Release date: 10.11.2016 Table of contents 1 Introduction...3 2 The MiR Hook hardware...3 3 Trolley specifications...4 4 Space requirements...5
Connection. 1. Diagnostic socket 2. Adaptor 3. Main cable 4. PC-MAX main unit 5. PC 6. Wireless adaptor
 PC MAX Wireless VCI Connection 1. Diagnostic socket 2. Adaptor 3. Main cable 4. PC-MAX main unit 5. PC 6. Wireless adaptor PC-MAX offers --Over 40 makes, 1,000 vehicle system coverage, --including CANbus
PC MAX Wireless VCI Connection 1. Diagnostic socket 2. Adaptor 3. Main cable 4. PC-MAX main unit 5. PC 6. Wireless adaptor PC-MAX offers --Over 40 makes, 1,000 vehicle system coverage, --including CANbus
Telematics Service for Commercial Vehicles to Realize Safe Traffic Society
 Telematics Service for Commercial Vehicles to Realize Safe Traffic Society Makoto Koike Masatsugu Isogai As operation management for commercial vehicles, services that use digital tachograph-based devices
Telematics Service for Commercial Vehicles to Realize Safe Traffic Society Makoto Koike Masatsugu Isogai As operation management for commercial vehicles, services that use digital tachograph-based devices
A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications
 Systems: Architectures, Controls, and Applications") A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications Ziran Wang (presenter), Guoyuan Wu, and Matthew J. Barth University of California, Riverside Nov.
A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications Ziran Wang (presenter), Guoyuan Wu, and Matthew J. Barth University of California, Riverside Nov.
A complete hybrid VTOL autopilot solution. Start anywhere, fly everywhere.
 Key Features A complete hybrid VTOL autopilot solution. Start anywhere, fly everywhere. Supported Vehicle Types s Multirotors Fixed-wings Bi-, tri- and quadcopter tailsitters, quadplanes and tiltrotors.
Key Features A complete hybrid VTOL autopilot solution. Start anywhere, fly everywhere. Supported Vehicle Types s Multirotors Fixed-wings Bi-, tri- and quadcopter tailsitters, quadplanes and tiltrotors.
UAE Ministry of Interior pilot project for RFID-based SCHOOLBUS/STUDENT TRACKING SYSTEM
 UAE Ministry of Interior pilot project for RFID-based SCHOOLBUS/STUDENT TRACKING SYSTEM Safe, secure and verified school bus transportation TECHNOLOGY School bus route tracking and live data transmission
UAE Ministry of Interior pilot project for RFID-based SCHOOLBUS/STUDENT TRACKING SYSTEM Safe, secure and verified school bus transportation TECHNOLOGY School bus route tracking and live data transmission
Challenges of Rotary Aircraft Rotating Component Instrumentation
 Challenges of Rotary Aircraft Rotating Component Instrumentation NAVAIR Public Release 2018-366, Distribution Statement A - Approved for Public Release; Distribution is Unlimited Presented to: ITEA Presented
Challenges of Rotary Aircraft Rotating Component Instrumentation NAVAIR Public Release 2018-366, Distribution Statement A - Approved for Public Release; Distribution is Unlimited Presented to: ITEA Presented
Conveyor Condition Monitoring. Increase uptime, decrease damage, plan repairs, avoid disaster
 Conveyor Condition Monitoring Increase uptime, decrease damage, plan repairs, avoid disaster Reliability through Condition Based Monitoring Benefits: Early identification of potential failures Reduce correction
Conveyor Condition Monitoring Increase uptime, decrease damage, plan repairs, avoid disaster Reliability through Condition Based Monitoring Benefits: Early identification of potential failures Reduce correction
Autonomous Golf. Team 43 - Thomas Holcomb and William Peterson ECE 445 Project Proposal - Fall 2016 TA: Nicholas Ratajczyk
 Autonomous Golf Team 43 - Thomas Holcomb and William Peterson ECE 445 Project Proposal - Fall 2016 TA: Nicholas Ratajczyk 1. Introduction 1.1 Objective From a practical standpoint, the biggest obstacle
Autonomous Golf Team 43 - Thomas Holcomb and William Peterson ECE 445 Project Proposal - Fall 2016 TA: Nicholas Ratajczyk 1. Introduction 1.1 Objective From a practical standpoint, the biggest obstacle
DSSI UAV. Unmanned Aerial Vehicle. Research & Development Project
 UAV Unmanned Aerial Vehicle HISTORY AND SKILLS of Small UAV with electrically powered propeller Description of the solution: Airframe,electronics, 2 battery sets 1 spare Airframe, battery charger Transport
UAV Unmanned Aerial Vehicle HISTORY AND SKILLS of Small UAV with electrically powered propeller Description of the solution: Airframe,electronics, 2 battery sets 1 spare Airframe, battery charger Transport
GPS-GSM Based Intelligent Vehicle Tracking System Using ARM7
 GPS-GSM Based Intelligent Vehicle Tracking System Using ARM7 T.Narasimha 1, Dr. D. Vishnuvardhan 2 Student, E.C.E Department, J.N.T.U.A College of Engineering, Pulivendula, India 1 Assistant Professor,
GPS-GSM Based Intelligent Vehicle Tracking System Using ARM7 T.Narasimha 1, Dr. D. Vishnuvardhan 2 Student, E.C.E Department, J.N.T.U.A College of Engineering, Pulivendula, India 1 Assistant Professor,
Detailed Design Review
 Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
A Presentation on. Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing
 in autonomous vehicles for alerting driver during overtaking and lane changing") A Presentation on Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing Presented By: Abhishek Shriram Umachigi Department of Electrical Engineering
A Presentation on Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing Presented By: Abhishek Shriram Umachigi Department of Electrical Engineering
Project 2: Traffic and Queuing (updated 28 Feb 2006)
") Project 2: Traffic and Queuing (updated 28 Feb 2006) The Evergreen Point Bridge (Figure 1) on SR-520 is ranked the 9 th worst commuter hot spot in the U.S. (AAA, 2005). This floating bridge supports the
Project 2: Traffic and Queuing (updated 28 Feb 2006) The Evergreen Point Bridge (Figure 1) on SR-520 is ranked the 9 th worst commuter hot spot in the U.S. (AAA, 2005). This floating bridge supports the
iwheels 3 Lawrence Technological University
 5-15-2017 iwheels 3 Lawrence Technological University Team Captain: Devson Butani dbutani@ltu.edu Faculty Advisors: CJ Chung Jonathan Ruszala Gordon Stein Team Members: Sean Bleicher Kevin Cox Nirmit Changani
5-15-2017 iwheels 3 Lawrence Technological University Team Captain: Devson Butani dbutani@ltu.edu Faculty Advisors: CJ Chung Jonathan Ruszala Gordon Stein Team Members: Sean Bleicher Kevin Cox Nirmit Changani
SAFE DRIVING USING MOBILE PHONES
 SAFE DRIVING USING MOBILE PHONES PROJECT REFERENCE NO. : 37S0527 COLLEGE : SKSVMA COLLEGE OF ENGINEERING AND TECHNOLOGY, GADAG BRANCH : COMPUTER SCIENCE AND ENGINEERING GUIDE : NAGARAJ TELKAR STUDENTS
SAFE DRIVING USING MOBILE PHONES PROJECT REFERENCE NO. : 37S0527 COLLEGE : SKSVMA COLLEGE OF ENGINEERING AND TECHNOLOGY, GADAG BRANCH : COMPUTER SCIENCE AND ENGINEERING GUIDE : NAGARAJ TELKAR STUDENTS
Stereo-vision for Active Safety
 Stereo-vision for Active Safety Project within Vehicle and Traffic Safety, 2009-00078 Author: Vincent Mathevon (Autoliv Electronics AB) Ola Bostrom (Autoliv Development AB) Date: 2012-06-07 Content 1.
Stereo-vision for Active Safety Project within Vehicle and Traffic Safety, 2009-00078 Author: Vincent Mathevon (Autoliv Electronics AB) Ola Bostrom (Autoliv Development AB) Date: 2012-06-07 Content 1.
Moksha. Unmanned Ground Vehicle. M S Ramaiah Institute of Technology s entry into the 2011 Intelligent Ground Vehicle Competition
 Moksha Unmanned Ground Vehicle M S Ramaiah Institute of Technology s entry into the 2011 Intelligent Ground Vehicle Competition Team Members: Pavan Kumar P N, Pramod Bhat M, Akshay Vishwas Joshi, Pavan
Moksha Unmanned Ground Vehicle M S Ramaiah Institute of Technology s entry into the 2011 Intelligent Ground Vehicle Competition Team Members: Pavan Kumar P N, Pramod Bhat M, Akshay Vishwas Joshi, Pavan
Autonomous Intelligent Vehicles (AIVs), self-mapping, self-navigation.
, self-mapping, self-navigation.") Autonomous Intelligent Vehicles (AIVs), self-mapping, self-navigation. Natural-feature navigation: automatically plans routes to prevent collisions Fleet management: supervises and coordinates the entire
Autonomous Intelligent Vehicles (AIVs), self-mapping, self-navigation. Natural-feature navigation: automatically plans routes to prevent collisions Fleet management: supervises and coordinates the entire
A Small, Manned Aircraft as a Testbed for Radar Sensor Development
 A Small, Manned Aircraft as a Testbed for Radar Sensor Development Matthew C. Edwards a, Evan C. Zaugg, a, David G. Long a, Richard Christiansen a and Alex Margulis b a Brigham Young University, 459 CB,
A Small, Manned Aircraft as a Testbed for Radar Sensor Development Matthew C. Edwards a, Evan C. Zaugg, a, David G. Long a, Richard Christiansen a and Alex Margulis b a Brigham Young University, 459 CB,
PerFix. PerFix Automated Optical Repair (AOR) System. PCB Production Solutions
 System. PCB Production Solutions") PerFix PerFix Automated Optical Repair (AOR) System PCB Production Solutions Major Benefits for Advanced HDI Production PerFix is a fully Automated Optical Repair (AOR) solution delivering unrivaled repair
PerFix PerFix Automated Optical Repair (AOR) System PCB Production Solutions Major Benefits for Advanced HDI Production PerFix is a fully Automated Optical Repair (AOR) solution delivering unrivaled repair
Cooperative brake technology
 Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
SMARTER THAN A CAMERA...
 SMARTER THAN A CAMERA... Includes SmartZone Sensing SmartZone Technology is the combination of sensors that detect the exact location of an object and a wide angle camera that allows the driver to see
SMARTER THAN A CAMERA... Includes SmartZone Sensing SmartZone Technology is the combination of sensors that detect the exact location of an object and a wide angle camera that allows the driver to see
A Communication-centric Look at Automated Driving
 A Communication-centric Look at Automated Driving Onur Altintas Toyota ITC Fellow Toyota InfoTechnology Center, USA, Inc. November 5, 2016 IEEE 5G Summit Seattle Views expressed in this talk do not necessarily
A Communication-centric Look at Automated Driving Onur Altintas Toyota ITC Fellow Toyota InfoTechnology Center, USA, Inc. November 5, 2016 IEEE 5G Summit Seattle Views expressed in this talk do not necessarily
SOKAR FPV DRONE. Quick Start Manual SAFETY PRECAUTIONS & WARRANTY AND SERVICE. Safety Precautions and Liability Exclusion. Warranty and Service
 SAFETY PRECAUTIS & WARRANTY AND SERVICE Safety Precautions and Liability Exclusion Sokar FPV Drone is NOT a toy. It is not suitable for using by any children under 14 years of age. It is a race quad and
SAFETY PRECAUTIS & WARRANTY AND SERVICE Safety Precautions and Liability Exclusion Sokar FPV Drone is NOT a toy. It is not suitable for using by any children under 14 years of age. It is a race quad and
Flexible and precise: tablet operated wheel alignment
 Flexible and precise: tablet operated wheel alignment FWA 4650 highly precise, fast and flexible: 12 Camera 3D wheel alignment operated by tablet Flexible operation with a workshop-owned tablet or notebook
Flexible and precise: tablet operated wheel alignment FWA 4650 highly precise, fast and flexible: 12 Camera 3D wheel alignment operated by tablet Flexible operation with a workshop-owned tablet or notebook
Centurion II Vehicle Design Report Bluefield State College
 Centurion II Vehicle Design Report Bluefield State College Ground Robotic Vehicle Team, May 2003 I, Dr. Robert Riggins,Professor of the Electrical Engineering Technology Department at Bluefield State College
Centurion II Vehicle Design Report Bluefield State College Ground Robotic Vehicle Team, May 2003 I, Dr. Robert Riggins,Professor of the Electrical Engineering Technology Department at Bluefield State College
Statement of Work Requirements Verification Table - Addendum
 Statement of Work Requirements Verification Table - Addendum Vehicle Requirements Requirement Success Criteria Verification 1.1 No specific design requirement exists for the altitude. The altitude is a
Statement of Work Requirements Verification Table - Addendum Vehicle Requirements Requirement Success Criteria Verification 1.1 No specific design requirement exists for the altitude. The altitude is a