NAU Robosub. Project Proposal
|
|
|
- Delilah Jenkins
- 6 years ago
- Views:
Transcription


1 NAU Robosub Project Proposal Mansour Alajemi, Feras Aldawsari, Curtis Green, Daniel Heaton, Wenkai Ren, William Ritchie, Bethany Sprinkle, Daniel Tkachenko December 09, 2015 Bethany
2 Overview Introduction Main Goal Tasks Constraints Criteria Functional Diagram Design Choice Overall Electrical System Main Computer Motor Control System Sub Main Routine Prototype FinalsDesign Total Project Cost Cost Breakdown Conclusions Mansour
3 Introduction Association for Unmanned Vehicle Systems International (AUVSI) International competition Includes high school and college teams Started in 2002 Mansour
4 Main Goal The AUVSI Robosub competition requires that we build a competitive robot meeting the design requirements that can complete all of the specified tasks autonomously. Mansour
5 Pass through a narrow gate Bump a specific colored buoy while avoiding 2 others of different colors Remove a lid from a bin and drop a marker inside Shoot a torpedo at a series of targets Move a PVC pipe structure to a specific area Surface in a specific area
6 Constraints The robot is required to be Autonomous The weight limit of the robot is less than 57kg The size limit of the robot is within 1.83m x 0.91m x 0.91m The competition requires a Kill Switch The time limit is within 15 minutes The power source requires U.S 120V 60Hz 15A electrical for all the countries Dan
7 Criteria Thruster Weight Cost Thrust Power draw max Dim(mm) Power source Weight Capacity Voltage Cost Ballast Dry weight Cost Pitch control Water seal area Energy consumption Computer/ controller processing RAM size bulkyness Weight Volume ADC pins 5V Dig I/O pins Cost Torpedoes Launch force Weight/Volume Accuracy Range Clasping System Clamping Force Clearance Carrying Load Cost Camera Resolution Size Power Cost protocol steps Acoustic Sensors Sensitivity Weight design cost monetary cost Software Language compiled community help Previous experience visual lib wrapping digital I/O lib wrapping corecampatablity threading ease to learn garbagecollection visual data snapshot ease Pressure Sensor Accuracy Cost Inertial Measurement Unit Range Range Weight Cost Dan
8 Functional Diagram Dan
")
9 Design Choice: Inertial Measurement Unit Sparkfun 9-dof Razor IMU Chosen for: Relatively low cost ease of programming 9-dof including: 3 accelerometers 3-axis gyroscope 3-axis magnetometer (compass) Dan

10 Design Choice: Pressure Sensor Omega PX309 (0-30psi) Chosen for: Low cost Good accuracy Effective to ~ 30 ft Dan Must be mounted internally
 Compact Inexpensive")
11 Design Choice: Power source Lithium Polymer Bethany Lightweight High capacity (mah) Compact Inexpensive

12 Design Choice: Torpedoes Compressed air system Chosen for: driving force on sub ease to implement with control system increased water resistivity fewer moving parts Bethany

13 Design Choice: Clasping system Claw system Chosen for: three claws maintain the stability easy to implement and mount 180 degree range of motion able to connect to the pneumatic system Wenkai

14 Design Choice: Cameras fish-lens 170 view 4Mp camera, pointed down large pixel count Linux OS compatible occurring target without moving sub 75 degree 8Mp camera, pointed forward large pixel count Linux OS compatible larger pixel per degree count good for acquiring targets and their distance Feras

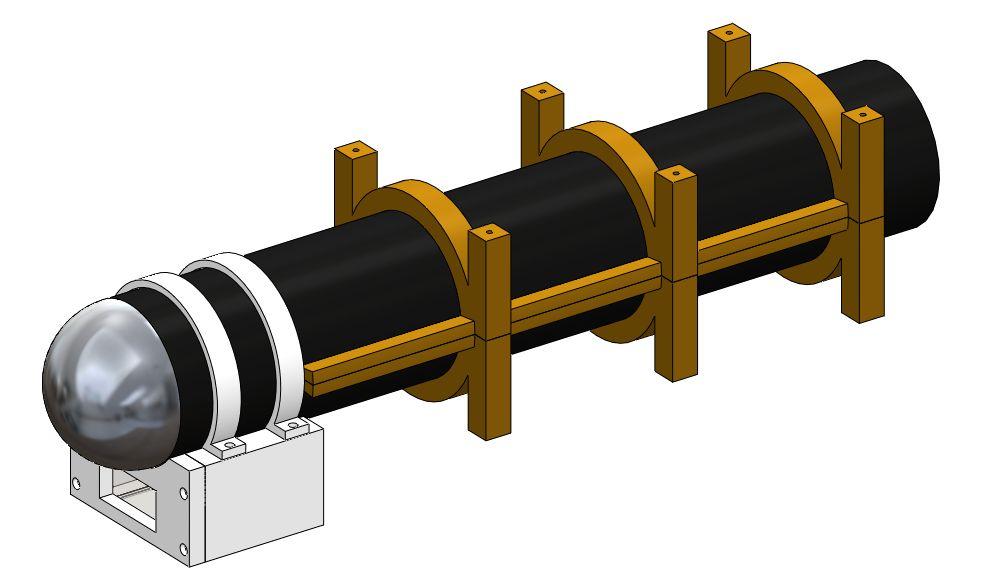
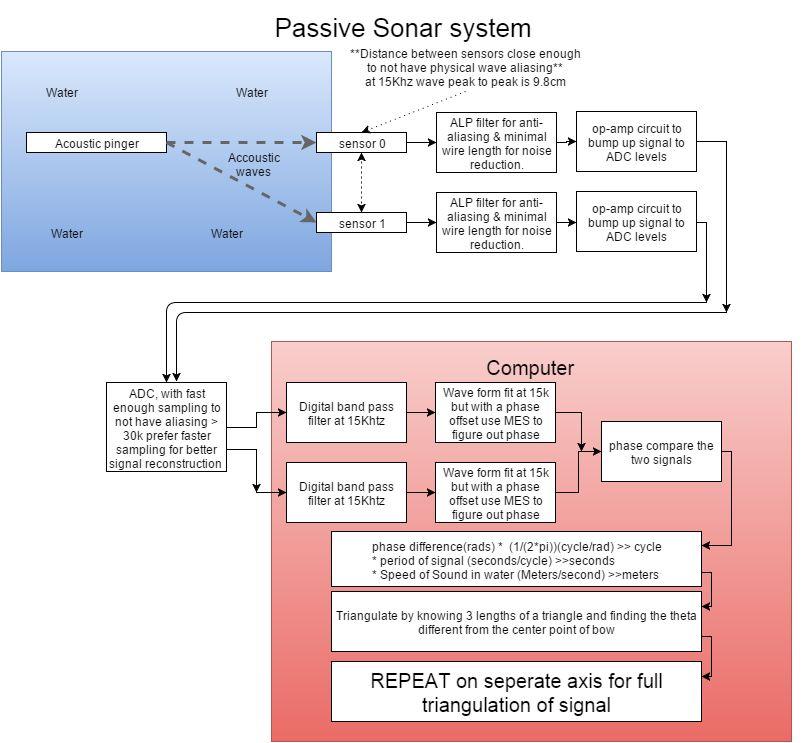
15 Design Choice: Acoustic sensors Aquarianaudio h1c hydrophone Chosen for: low cost available specs ease mounting with ¼ NPT shielded cable will

16 Design Choice: Software Language Python Chosen for: ease to learn Image processing libraries Compatibility with other libraries Socket parallel programming large user community can be compiled will

17 Design Choice: Thrusters Blue Robotics T100 Chosen for: High thrust Rugged and durable Relatively low cost Daniel
18 Design Choice: Frame Attachment Bracket pattern Ease of attachment Simple design Modular Expandable Affordability Easy to modify Relatively Lightweight Standardization Skeletal Daniel
19 Daniel
20 Design choice: Frame attachment Daniel
21 Design Choice: Computer/controller ODROID: 2 GB DDR3 RAM 8 cores, 2 Gh (parallel processing) 3 ADC pins Chosen for: High speed and ADC signal crunching Raspberry Pi: 512 MB RAM 1 core, 0.7 Gh 0 ADC pins Chosen for: Low cost and ease of programming Curtis
22 Overall Electrical System Wenkai
23 Main Computer Curtis
24 Motor Control System Curtis
25 will
26 Sub Main Routine Will
27 Prototype A prototype was designed to test camera and thruster capabilities This was a barebones design intended to make sure the coding systems would in fact be able to move the sub based only on camera inputs shows dampened line following response Video Feras
28 everyone

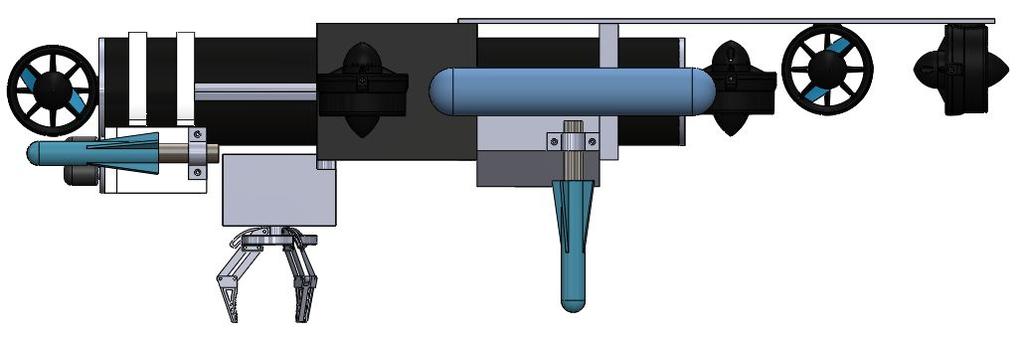
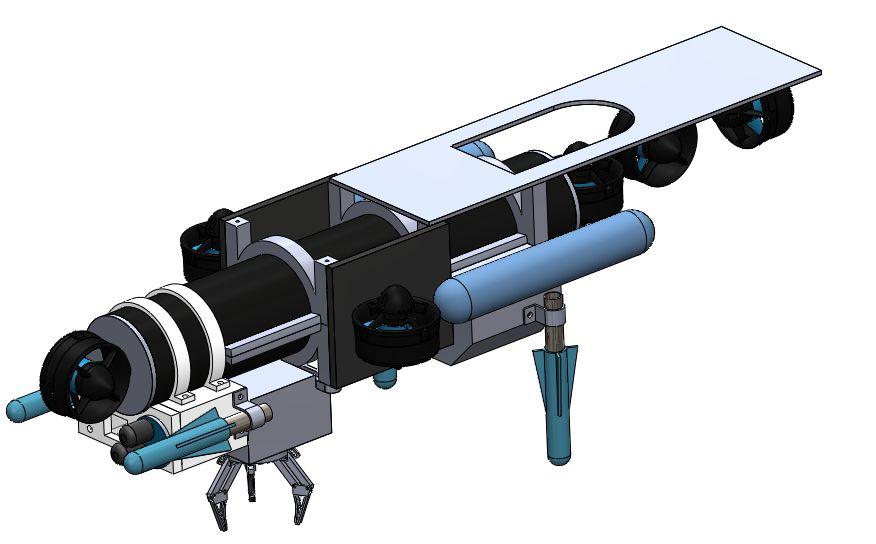
29 Final Design everyone
30 Total Project cost Electrical Control $ Hydrophones $ Motors and Batteries $ Pneumatics $ Frame and other Mechanical $89.00 Registration cost $ TOTAL PROJECT COST $2, Wenkai
31 Cost Breakdown Without pneumatics cost - $452 point loss from clamp point loss from torpedoes Without markers cost - $cheap point loss Without audio sensors cost - $ point loss Wenkai
32 Conclusions We have entered the AUVSI Robosub competition to build an autonomous submarine capable of completing a number of tasks The design process involved creating a functional diagram including all mechanical, electrical, and computational systems Each system on this diagram was designed Python programming language Blue Robotics thrusters lithium polymer batteries compressed air torpedoes pneumatic claw clasping system fish-lens 170 view 4Mp camera downward 75 degree 8Mp camera forward h1c acoustic sensors Feras
33 Conclusions Omega PX301 pressure transducer Sparkfun Razor 9-dof IMU ODROID computer Raspberry Pi controller A frame was designed to facilitate mounting of all systems Electrical systems were designed Computer algorithms are being built to tackle each of the many obstacles A prototype was built to validate the capabilities of the camerathruster interaction A final design was created including all possible systems A BOM was created and costs were compiled projected costs are above budget without sacrificing some systems Feras
AUVSI Robosub. Concept Generation and Selection Document
 AUVSI Robosub By Mansour Alajemi, Feras Aldawsari, Curtis Green, Daniel Heaton, Wenkai Ren, William Ritchie, Bethany Sprinkle, Daniel Tkachenko Team 09 Concept Generation and Selection Document Submitted
AUVSI Robosub By Mansour Alajemi, Feras Aldawsari, Curtis Green, Daniel Heaton, Wenkai Ren, William Ritchie, Bethany Sprinkle, Daniel Tkachenko Team 09 Concept Generation and Selection Document Submitted
2016 AUVSI Robosub Competition 2016 NAU Robosub Team
 2016 AUVSI Robosub Competition 2016 NAU Robosub Team Mansour Alajemi, Feras Aldawsari, Curtis Green, Daniel Heaton, Wenkai Ren, William Ritchie, Bethany Sprinkle, Daniel Tkachenko Final Project Concept:
2016 AUVSI Robosub Competition 2016 NAU Robosub Team Mansour Alajemi, Feras Aldawsari, Curtis Green, Daniel Heaton, Wenkai Ren, William Ritchie, Bethany Sprinkle, Daniel Tkachenko Final Project Concept:
USU RoboSub Autonomous Underwater Vehicle Team: Design and Implementation of the Submarine Poseidon
 Utah State RoboSub Team 1 USU RoboSub Autonomous Underwater Vehicle Team: Design and Implementation of the Submarine Poseidon Abstract The submarine Poseidon is an autonomous underwater vehicle designed
Utah State RoboSub Team 1 USU RoboSub Autonomous Underwater Vehicle Team: Design and Implementation of the Submarine Poseidon Abstract The submarine Poseidon is an autonomous underwater vehicle designed
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Maritime State University AUV TEAM Autonomous underwater vehicle for RoboSub 2015
 Maritime State University AUV TEAM Autonomous underwater vehicle for RoboSub 2015 Igor Pushkarev, Nikolai Sergeenko, Vladislav Bolotov, Dmitrii Nechepurenko, Vadim Sorin, Ruslan Revel, Dmitrii Khokhlov,
Maritime State University AUV TEAM Autonomous underwater vehicle for RoboSub 2015 Igor Pushkarev, Nikolai Sergeenko, Vladislav Bolotov, Dmitrii Nechepurenko, Vadim Sorin, Ruslan Revel, Dmitrii Khokhlov,
ORCA XI: An Autonomous Underwater Vehicle
 ORCA XI:AnAutonomousUnderwaterVehicle YazanAldehayyat,RichardDahan,ImanFayyad, JeanMartin,MatthewPerkins,RachelSharples MassachusettsInstituteofTechnology ProjectORCA 77MassachusettsAvenue,Room4 405 Cambridge,MA02139
ORCA XI:AnAutonomousUnderwaterVehicle YazanAldehayyat,RichardDahan,ImanFayyad, JeanMartin,MatthewPerkins,RachelSharples MassachusettsInstituteofTechnology ProjectORCA 77MassachusettsAvenue,Room4 405 Cambridge,MA02139
Underwater Robotics Club at NC State University. Sponsorship Book
 Underwater Robotics Club at NC State University Sponsorship Book Table of Contents About Us 3 Seawolf VI 3 Outreach 4 Subteams 4 RoboSub 6 Contact Us 8 Sponsor Benefits 9 2 About Us The Underwater Robotics
Underwater Robotics Club at NC State University Sponsorship Book Table of Contents About Us 3 Seawolf VI 3 Outreach 4 Subteams 4 RoboSub 6 Contact Us 8 Sponsor Benefits 9 2 About Us The Underwater Robotics
Autonomous Unmanned Aerial Systems 1. ABSTRACT
 1. ABSTRACT Zeppelin FC 26, a team formed in 2014, has undergone exponential growth. We have delved into diverse and challenging endeavors, ranging from systems integration to design and development of
1. ABSTRACT Zeppelin FC 26, a team formed in 2014, has undergone exponential growth. We have delved into diverse and challenging endeavors, ranging from systems integration to design and development of
INTRODUCTION Team Composition Electrical System
 IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
2015 AUVSI UAS Competition Journal Paper
 2015 AUVSI UAS Competition Journal Paper Abstract We are the Unmanned Aerial Systems (UAS) team from the South Dakota School of Mines and Technology (SDSM&T). We have built an unmanned aerial vehicle (UAV)
2015 AUVSI UAS Competition Journal Paper Abstract We are the Unmanned Aerial Systems (UAS) team from the South Dakota School of Mines and Technology (SDSM&T). We have built an unmanned aerial vehicle (UAV)
SPONSORSHIP C U A U V ORNELL NIVERSITY UTONOMOUS NDERWATER EHICLE
 SPONSORSHIP 2013-2014 C U A U V ORNELL NIVERSITY UTONOMOUS NDERWATER EHICLE contents 3 about us 4 team facts 5 competition overview 6 competition details 7 the vehicle 8 subteams 11 outreach 12 sponsor
SPONSORSHIP 2013-2014 C U A U V ORNELL NIVERSITY UTONOMOUS NDERWATER EHICLE contents 3 about us 4 team facts 5 competition overview 6 competition details 7 the vehicle 8 subteams 11 outreach 12 sponsor
NASA University Student Launch Initiative (Sensor Payload) Final Design Review. Payload Name: G.A.M.B.L.S.
 Final Design Review. Payload Name: G.A.M.B.L.S.") NASA University Student Launch Initiative (Sensor Payload) Final Design Review Payload Name: G.A.M.B.L.S. CPE496-01 Computer Engineering Design II Electrical and Computer Engineering The University of
NASA University Student Launch Initiative (Sensor Payload) Final Design Review Payload Name: G.A.M.B.L.S. CPE496-01 Computer Engineering Design II Electrical and Computer Engineering The University of
AUV ROBOSUB
 AUV ROBOSUB 2016-2017 COLORADO STATE UNIVERSITY ELECTRICAL AND COMPUTER ENGINEERING DEPARTMENT SENIOR DESIGN FALL 2016 PRESENTATION OVERVIEW 1. Introduction to the team and project 2. Sub-team constraints
AUV ROBOSUB 2016-2017 COLORADO STATE UNIVERSITY ELECTRICAL AND COMPUTER ENGINEERING DEPARTMENT SENIOR DESIGN FALL 2016 PRESENTATION OVERVIEW 1. Introduction to the team and project 2. Sub-team constraints
SAE Mini Baja. Frame Team. Ahmed Alnattar, Neil Gehr, Matthew Legg. Project Proposal
 SAE Mini Baja Frame Team Project Proposal Ahmed Alnattar, Neil Gehr, Matthew Legg 12-3-14 1 Overview Introduction Customer s Needs and Project Goals Constraints, Objectives, QFD, and Timeline Concept Generation
SAE Mini Baja Frame Team Project Proposal Ahmed Alnattar, Neil Gehr, Matthew Legg 12-3-14 1 Overview Introduction Customer s Needs and Project Goals Constraints, Objectives, QFD, and Timeline Concept Generation
23083 Hwy. 190E P.O. Box 898 Robert, LA USA Phone: (985) Expanded Description of Rope/Riser Crawler
 Expanded Description of Rope/Riser Crawler") 23083 Hwy. 190E P.O. Box 898 Robert, LA 70455 USA Phone: (985)350-6299 e-mail: info@seatrepid.com Expanded Description of Rope/Riser Crawler ABSTRACT A semi-autonomous [tetherless] or tele-operated [tethered]
23083 Hwy. 190E P.O. Box 898 Robert, LA 70455 USA Phone: (985)350-6299 e-mail: info@seatrepid.com Expanded Description of Rope/Riser Crawler ABSTRACT A semi-autonomous [tetherless] or tele-operated [tethered]
Unmanned Surface Vessels - Opportunities and Technology
 Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
UNIVERSITÉ DE MONCTON FACULTÉ D INGÉNIERIE. Moncton, NB, Canada PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY
 FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
UAV KF-1 helicopter. CopterCam UAV KF-1 helicopter specification
 UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
DELHI TECHNOLOGICAL UNIVERSITY TEAM RIPPLE Design Report
 DELHI TECHNOLOGICAL UNIVERSITY TEAM RIPPLE Design Report May 16th, 2018 Faculty Advisor Statement: I hereby certify that the development of vehicle, described in this report has been equivalent to the
DELHI TECHNOLOGICAL UNIVERSITY TEAM RIPPLE Design Report May 16th, 2018 Faculty Advisor Statement: I hereby certify that the development of vehicle, described in this report has been equivalent to the
Pothole Tracker. Muhammad Mir. Daniel Chin. Mike Catalano. Bill Quigg Advisor: Professor Ciesielski
 Pothole Tracker Muhammad Mir. Daniel Chin. Mike Catalano. Bill Quigg Advisor: Professor Ciesielski Pothole Tracker Muhammad Mir CSE Team 5 Daniel Chin CSE Mike Catalano EE Bill Quigg EE Why are Potholes
Pothole Tracker Muhammad Mir. Daniel Chin. Mike Catalano. Bill Quigg Advisor: Professor Ciesielski Pothole Tracker Muhammad Mir CSE Team 5 Daniel Chin CSE Mike Catalano EE Bill Quigg EE Why are Potholes
System Level Design Review
 System Level Design Review HABIP High Altitude Balloon Instrumentation Platform P17104 & P17105 October 6, 2016 Team Members Team Communications Data Acquisition and Control Systems Team Member Major Team
System Level Design Review HABIP High Altitude Balloon Instrumentation Platform P17104 & P17105 October 6, 2016 Team Members Team Communications Data Acquisition and Control Systems Team Member Major Team
2 nd Generation Charging Station
 2 nd Generation Charging Station By Jasem Alhabashy, Riyadh Alzahrani, Brandon Gabrelcik, Ryan Murphy and Ruben Villezcas Team 13 Problem Definition and Project Plan Document Submitted towards partial
2 nd Generation Charging Station By Jasem Alhabashy, Riyadh Alzahrani, Brandon Gabrelcik, Ryan Murphy and Ruben Villezcas Team 13 Problem Definition and Project Plan Document Submitted towards partial
Club Capra- Minotaurus Design Report
 Table of content Introduction... 3 Team... 3 Cost... 4 Mechanical design... 4 Structure of Minotaurus... 5 Drive train... 6 Electronics... 7 Batteries... 7 Power supply... 7 System signal processing...
Table of content Introduction... 3 Team... 3 Cost... 4 Mechanical design... 4 Structure of Minotaurus... 5 Drive train... 6 Electronics... 7 Batteries... 7 Power supply... 7 System signal processing...
AcuBMS Battery Management System for Rechargeable Lithium-Based Batteries ELECOMP Capstone Design Project
 AcuBMS Battery Management System for Rechargeable Lithium-Based Batteries ELECOMP Capstone Design Project 2018-2019 Sponsoring Company: Acumentrics, Inc 10 Walpole Park South Walpole, MA 02081 1-617-935-7877
AcuBMS Battery Management System for Rechargeable Lithium-Based Batteries ELECOMP Capstone Design Project 2018-2019 Sponsoring Company: Acumentrics, Inc 10 Walpole Park South Walpole, MA 02081 1-617-935-7877
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition
 Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Closing Sale Prices. AmigoBot Pioneer 3-DX Pioneer 3-AT Pioneer LX Pioneer Manipulator PeopleBot PowerBot Seekur Jr
 10 Columbia Drive Amherst, NH 03031 USA T. +1.603.881.7960 F. +1.603.881.3818 www.mobilerobots.com Closing Prices 90 Day Warranty on all s Limited Quantities Available Models AmigoBot Pioneer 3-DX Pioneer
10 Columbia Drive Amherst, NH 03031 USA T. +1.603.881.7960 F. +1.603.881.3818 www.mobilerobots.com Closing Prices 90 Day Warranty on all s Limited Quantities Available Models AmigoBot Pioneer 3-DX Pioneer
SubjuGator 2015: Design and Implementation of a Modular, High-Performance AUV
 SubjuGator 2015: Design and Implementation of a Modular, High-Performance AUV J. Nezvadovitz 1, M. Griessler, F. Voight, P. Walters, E. M. Schwartz jnezvadovitz@ufl.edu, mgriessler@ufl.edu, forrestv@ufl.edu,
SubjuGator 2015: Design and Implementation of a Modular, High-Performance AUV J. Nezvadovitz 1, M. Griessler, F. Voight, P. Walters, E. M. Schwartz jnezvadovitz@ufl.edu, mgriessler@ufl.edu, forrestv@ufl.edu,
SUMMER PROJECT ROBOTICS CLUB, IIT KANPUR
 SUMMER PROJECT ROBOTICS CLUB, IIT KANPUR 2013 AUTONOMOUS UNDERWATER VEHICLE Mentor - Dhrupal R. Shah Hall-10 Mob:-8765696060 Members Prakhar Jain Hall-5 Mob:-9807885652 Pranav Vyas Hall-3 Mob:-9695796655
SUMMER PROJECT ROBOTICS CLUB, IIT KANPUR 2013 AUTONOMOUS UNDERWATER VEHICLE Mentor - Dhrupal R. Shah Hall-10 Mob:-8765696060 Members Prakhar Jain Hall-5 Mob:-9807885652 Pranav Vyas Hall-3 Mob:-9695796655
Experimental Validation of a Scalable Mobile Robot for Traversing Ferrous Pipelines
 Project Number: MQP TP1- IPG1 Experimental Validation of a Scalable Mobile Robot for Traversing Ferrous Pipelines A Major Qualifying Project (MQP) Submitted to the Faculty of WORCESTER POYTECHNIC INSTITUTE
Project Number: MQP TP1- IPG1 Experimental Validation of a Scalable Mobile Robot for Traversing Ferrous Pipelines A Major Qualifying Project (MQP) Submitted to the Faculty of WORCESTER POYTECHNIC INSTITUTE
Carl Hayden High School s Falcon Robotics Autonomous Underwater Vehicle Entry For The RoboSub Competition Sovereign Rover
 Falcon Robotics AUV Carl Hayden High School s Falcon Robotics Autonomous Underwater Vehicle Entry For The RoboSub Competition 2011 Sovereign Rover Abstract: Falcon Robotics Sovereign Rover is the team
Falcon Robotics AUV Carl Hayden High School s Falcon Robotics Autonomous Underwater Vehicle Entry For The RoboSub Competition 2011 Sovereign Rover Abstract: Falcon Robotics Sovereign Rover is the team
Chapter 45 Adaptive Cars Headlamps System with Image Processing and Lighting Angle Control
 Chapter 45 Adaptive Cars Headlamps System with Image Processing and Lighting Angle Control William Tandy Prasetyo, Petrus Santoso and Resmana Lim Abstract The project proposed a prototype of an adaptive
Chapter 45 Adaptive Cars Headlamps System with Image Processing and Lighting Angle Control William Tandy Prasetyo, Petrus Santoso and Resmana Lim Abstract The project proposed a prototype of an adaptive
WE Bots Project CAR. Competative Autonomus Racer
 WE Bots Project CAR Competative Autonomus Racer Jacob Tryon, Andrew Simpson, Kevin Mclean, Andrew Cullen, Paul Voege Engineering Department. The University of Western Ontario WE Bots London, Canada webots@eng.uwo.ca
WE Bots Project CAR Competative Autonomus Racer Jacob Tryon, Andrew Simpson, Kevin Mclean, Andrew Cullen, Paul Voege Engineering Department. The University of Western Ontario WE Bots London, Canada webots@eng.uwo.ca
An Autonomous Braking System of Cars Using Artificial Neural Network
 I J C T A, 9(9), 2016, pp. 3665-3670 International Science Press An Autonomous Braking System of Cars Using Artificial Neural Network P. Pavul Arockiyaraj and P.K. Mani ABSTRACT The main aim is to develop
I J C T A, 9(9), 2016, pp. 3665-3670 International Science Press An Autonomous Braking System of Cars Using Artificial Neural Network P. Pavul Arockiyaraj and P.K. Mani ABSTRACT The main aim is to develop
Control of Mobile Robots
 Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
MIPRover: A Two-Wheeled Dynamically Balancing Mobile Inverted Pendulum Robot
 ECE 3992 Senior Project Proposal MIPRover: A Two-Wheeled Dynamically Balancing Mobile Inverted Pendulum Robot 6 May 2005 Prepared By: Kevin E. Waters Department of Electrical and Computer Engineering University
ECE 3992 Senior Project Proposal MIPRover: A Two-Wheeled Dynamically Balancing Mobile Inverted Pendulum Robot 6 May 2005 Prepared By: Kevin E. Waters Department of Electrical and Computer Engineering University
CS 188: Artificial Intelligence
 CS 188: Artificial Intelligence Advanced Applications: Robotics Pieter Abbeel UC Berkeley A few slides from Sebastian Thrun, Dan Klein 2 So Far Mostly Foundational Methods 3 1 Advanced Applications 4 Autonomous
CS 188: Artificial Intelligence Advanced Applications: Robotics Pieter Abbeel UC Berkeley A few slides from Sebastian Thrun, Dan Klein 2 So Far Mostly Foundational Methods 3 1 Advanced Applications 4 Autonomous
EcoCar3-ADAS. Project Plan. Summary. Why is This Project Important?
 EcoCar3-ADAS Project Plan Summary Scott Smith This project is the Advanced Driver Assistance System (ADAS) of the 2015-2016 Senior Design for the EcoCar3. This will be an embedded system for the EcoCar3
EcoCar3-ADAS Project Plan Summary Scott Smith This project is the Advanced Driver Assistance System (ADAS) of the 2015-2016 Senior Design for the EcoCar3. This will be an embedded system for the EcoCar3
Linear Induction Motor (LIMO) Modular Test Bed for Various Applications
 Modular Test Bed for Various Applications") Linear Induction Motor (LIMO) Modular Test Bed for Various Applications University of Connecticut Department of Electrical and Computer Engineering Advanced Power Electronics and Electric Drives Lab (APEDL)
Linear Induction Motor (LIMO) Modular Test Bed for Various Applications University of Connecticut Department of Electrical and Computer Engineering Advanced Power Electronics and Electric Drives Lab (APEDL)
Rose-Hulman Autonomous Terrain Traverser
 Rose-Hulman Autonomous Terrain Traverser Michael Auchter, Jay Kinzie, Jon Klein, Tom Most, Andy Spencer {auchtemm,kinziejh,kleinjt,mosttw,spenceal}@rose-hulman.edu Robotics Team, CM 5000 Rose-Hulman Institute
Rose-Hulman Autonomous Terrain Traverser Michael Auchter, Jay Kinzie, Jon Klein, Tom Most, Andy Spencer {auchtemm,kinziejh,kleinjt,mosttw,spenceal}@rose-hulman.edu Robotics Team, CM 5000 Rose-Hulman Institute
Gavin Hannah - HND Electronic Engineering Graded Unit Solutions. Christian Hammond, City of Glasgow College. John Woods, City of Glasgow College
 Project Name: SARRRO (Search & Rescue Reconnaissance Rover) Customer: Supervisor: Engineer: Christian Hammond, City of Glasgow College John Woods, City of Glasgow College Gavin Hannah Project Solutions
Project Name: SARRRO (Search & Rescue Reconnaissance Rover) Customer: Supervisor: Engineer: Christian Hammond, City of Glasgow College John Woods, City of Glasgow College Gavin Hannah Project Solutions
DRIVERLESS SCHOOL BUS
 World Robot Olympiad 2019 WeDo Open Category Game Description, Rules and Evaluation SMART CITIES DRIVERLESS SCHOOL BUS Version: January 15 th WRO International Premium Partners INTRODUCTION... 2 1. CHALLENGE
World Robot Olympiad 2019 WeDo Open Category Game Description, Rules and Evaluation SMART CITIES DRIVERLESS SCHOOL BUS Version: January 15 th WRO International Premium Partners INTRODUCTION... 2 1. CHALLENGE
OBI-M2. Compact and Rugged Combustion Analysis System for use on Vehicles, Motorbikes and Test Benches
 OBI-M2 Compact and Rugged Combustion Analysis System for use on Vehicles, Motorbikes and Test Benches OBI-M2 is an extremely compact and fully featured combustion analysis system suitable for use on test
OBI-M2 Compact and Rugged Combustion Analysis System for use on Vehicles, Motorbikes and Test Benches OBI-M2 is an extremely compact and fully featured combustion analysis system suitable for use on test
GCAT. University of Michigan-Dearborn
 GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
S.E.V Solar Extended Vehicle
 S.E.V Solar Extended Vehicle EEL 4914 Senior Design II Group #4 Hamed Alostath Daniel Grainger Frank Niles Sergio Roig Motivation The majority of electric motor RC planes tend to have a low flight time
S.E.V Solar Extended Vehicle EEL 4914 Senior Design II Group #4 Hamed Alostath Daniel Grainger Frank Niles Sergio Roig Motivation The majority of electric motor RC planes tend to have a low flight time
Designed In The Future
 Quick Start Guide V1.0 Designed In The Future S6 Overview S6 is a new generation recreational aircraft which is independent developed by WINGSLAND Technology. With folding arms design, 4K electronic image
Quick Start Guide V1.0 Designed In The Future S6 Overview S6 is a new generation recreational aircraft which is independent developed by WINGSLAND Technology. With folding arms design, 4K electronic image
Automated Driving is the declared goal of the automotive industry. Systems evolve from complicated to complex
 Automated Driving is the declared goal of the automotive industry Systems evolve from complicated to complex Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity
Automated Driving is the declared goal of the automotive industry Systems evolve from complicated to complex Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity
REU: Improving Straight Line Travel in a Miniature Wheeled Robot
 THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
A brief History of Unmanned Aircraft
 A brief History of Unmanned Aircraft Technological Background Dr. Bérénice Mettler University of Minnesota Jan. 22-24, 2012 (v. 1/15/13) Dr. Bérénice Mettler (University of Minnesota) A brief History of
A brief History of Unmanned Aircraft Technological Background Dr. Bérénice Mettler University of Minnesota Jan. 22-24, 2012 (v. 1/15/13) Dr. Bérénice Mettler (University of Minnesota) A brief History of
Charging Bicycle Station Second Generation By Peet Dhillon, Alex Devine, Rashed Alharbi Team 22A. Design Progress Document
 Charging Bicycle Station Second Generation By Peet Dhillon, Alex Devine, Rashed Alharbi Team 22A Design Progress Document Submitted towards partial fulfillment of the requirements for Mechanical Engineering
Charging Bicycle Station Second Generation By Peet Dhillon, Alex Devine, Rashed Alharbi Team 22A Design Progress Document Submitted towards partial fulfillment of the requirements for Mechanical Engineering
Finite Element Based, FPGA-Implemented Electric Machine Model for Hardware-in-the-Loop (HIL) Simulation
 Simulation") Finite Element Based, FPGA-Implemented Electric Machine Model for Hardware-in-the-Loop (HIL) Simulation Leveraging Simulation for Hybrid and Electric Powertrain Design in the Automotive, Presentation Agenda
Finite Element Based, FPGA-Implemented Electric Machine Model for Hardware-in-the-Loop (HIL) Simulation Leveraging Simulation for Hybrid and Electric Powertrain Design in the Automotive, Presentation Agenda
Autonomous Ground Vehicle
 Autonomous Ground Vehicle Senior Design Project EE Anshul Tandon Brandon Nason Brian Aidoo Eric Leefe Advisors: ME Donald Lee Hardee Ivan Bolanos Wilfredo Caceres Mr. Bryan Audiffred Dr. Michael C. Murphy
Autonomous Ground Vehicle Senior Design Project EE Anshul Tandon Brandon Nason Brian Aidoo Eric Leefe Advisors: ME Donald Lee Hardee Ivan Bolanos Wilfredo Caceres Mr. Bryan Audiffred Dr. Michael C. Murphy
TWELFTH ANNUAL INTERNATIONAL GROUND VEHICLE COMPETITION. Design Report
 TWELFTH ANNUAL INTERNATIONAL GROUND VEHICLE COMPETITION ALVIN-V Design Report Michelle Bovard, Trishan de Lanerolle, Nhon Trinh, Peter Votto, Matthew Gillette, Bozidar Marinkovic, Susmita Bhandari, Kevin
TWELFTH ANNUAL INTERNATIONAL GROUND VEHICLE COMPETITION ALVIN-V Design Report Michelle Bovard, Trishan de Lanerolle, Nhon Trinh, Peter Votto, Matthew Gillette, Bozidar Marinkovic, Susmita Bhandari, Kevin
PROJECT IDEA SUBMISSION STUDENT
 PROJECT IDEA SUBMISSION STUDENT Team Contacts - 1 st person listed serves as the point of contact with Professor Jensen - Initial team size may be from 4 to 6 members (all members must agree to have their
PROJECT IDEA SUBMISSION STUDENT Team Contacts - 1 st person listed serves as the point of contact with Professor Jensen - Initial team size may be from 4 to 6 members (all members must agree to have their
Robust Flight Controller for a Hexcopter
 Robust Flight Controller for a Hexcopter ECE 4600 Group Project Proposal Group 02 Members: Bryan Drobot Curtis Einarson Stephanie English Kelly Riha Supervising Professor: Dr. Witold Kinsner Submission
Robust Flight Controller for a Hexcopter ECE 4600 Group Project Proposal Group 02 Members: Bryan Drobot Curtis Einarson Stephanie English Kelly Riha Supervising Professor: Dr. Witold Kinsner Submission
Palamede, more than a microsatellite. Workshop on University Micro Satellites in Italy Rome, July 27, 2005
 Palamede, more than a microsatellite The Palamede Team (represented by Franco Bernelli and Roberto Armellin) Workshop on University Micro Satellites in Italy Rome, July 27, 2005 Outline Mission and educational
Palamede, more than a microsatellite The Palamede Team (represented by Franco Bernelli and Roberto Armellin) Workshop on University Micro Satellites in Italy Rome, July 27, 2005 Outline Mission and educational
Ben-Gurion University of the Negev Autonomous Underwater Vehicle: Design and Implementation of the Hydro-Camel HAUV
 AUVSI FOUNDATION AND ONR INTERNATIONAL ROBOSUB COMPETITION 1 Ben-Gurion University of the Negev Autonomous Underwater Vehicle: Design and Implementation of the Hydro-Camel HAUV Boris Braginsky, Guy Kagan,
AUVSI FOUNDATION AND ONR INTERNATIONAL ROBOSUB COMPETITION 1 Ben-Gurion University of the Negev Autonomous Underwater Vehicle: Design and Implementation of the Hydro-Camel HAUV Boris Braginsky, Guy Kagan,
100+ MILLION EUROS OF TURNOVER 600+ EMPLOYEES 80% OF TURNOVER ACHIEVED ABROAD 20% OF TURNOVER REINVESTED EACH YEAR IN R&D. ixblue at a glance
 MOTION SIMULATORS ixblue stands as a global leader in the design and manufacturing of innovative solutions for navigation, positioning and acoustic imaging markets. The French Group offers its unique advanced
MOTION SIMULATORS ixblue stands as a global leader in the design and manufacturing of innovative solutions for navigation, positioning and acoustic imaging markets. The French Group offers its unique advanced
Palos Verdes High School 1
 Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
Design of SPARUS II AUV
 Design of SPARUS II AUV Underwater Robotics Research Centre (CIRS) Computer Vision and Robotics Institute Universitat de Girona, 17003, Girona, Spain. web: http://cirs.udg.edu Contact person: Marc Carreras
Design of SPARUS II AUV Underwater Robotics Research Centre (CIRS) Computer Vision and Robotics Institute Universitat de Girona, 17003, Girona, Spain. web: http://cirs.udg.edu Contact person: Marc Carreras
Python Series Control Valves
 s When accurate control is desired from your steam or water applications the Armstrong Python 1100 Series Control Valve will squeeze every bit of performance out of your system and deliver precise control.
s When accurate control is desired from your steam or water applications the Armstrong Python 1100 Series Control Valve will squeeze every bit of performance out of your system and deliver precise control.
DOBBY Pocket Drone. Quick Start Guide V2.1
 DOBBY Pocket Drone Quick Start Guide V2.1 Aircraft The DOBBY Pocket Drone is pocket-sized and foldable flying camera for everyone, featuring Auto Pull-away Short Video, Target Tracking, Orbit shooting
DOBBY Pocket Drone Quick Start Guide V2.1 Aircraft The DOBBY Pocket Drone is pocket-sized and foldable flying camera for everyone, featuring Auto Pull-away Short Video, Target Tracking, Orbit shooting
SAE Baja: Suspension & Steering Benjamin Bastidos, Victor Cabilan, Jeramie Goodwin, William Mitchell, Eli Wexler
 SAE Baja: Suspension & Steering Benjamin Bastidos, Victor Cabilan, Jeramie Goodwin, William Mitchell, Eli Wexler Wednesday, October 9, 2013 Overview Introduction Operating Environment Recognizing the Need
SAE Baja: Suspension & Steering Benjamin Bastidos, Victor Cabilan, Jeramie Goodwin, William Mitchell, Eli Wexler Wednesday, October 9, 2013 Overview Introduction Operating Environment Recognizing the Need
AUVSI SUAS 2013 Journal Paper
 SIMON FRASER UNIVERSITY AUVSI SUAS 2013 Journal Paper Prepared By: Team GUARDIAN 5/30/2013 Team Members: James Allnutt, Shannon Blacker, Miguel Cruz, Timothy Gjernes, Allan Lee, Bryan Pattison, Jessica
SIMON FRASER UNIVERSITY AUVSI SUAS 2013 Journal Paper Prepared By: Team GUARDIAN 5/30/2013 Team Members: James Allnutt, Shannon Blacker, Miguel Cruz, Timothy Gjernes, Allan Lee, Bryan Pattison, Jessica
GNEG 1103 Introduction to Engineering FALL Team Design Project. Portable Phone Charger. Project Presentation. December 2, 2013, 8:00-9:15 A.
 1 GNEG 1103 Introduction to Engineering FALL 2013 Team Design Project Portable Phone Charger Project Presentation December 2, 2013, 8:00-9:15 A.M Derek Richard, Jarod Brunick, Luis Ramirez, Mason Torgerson
1 GNEG 1103 Introduction to Engineering FALL 2013 Team Design Project Portable Phone Charger Project Presentation December 2, 2013, 8:00-9:15 A.M Derek Richard, Jarod Brunick, Luis Ramirez, Mason Torgerson
University of Central Florida Entry for the 2013 AUVSI Foundation s International Aerial Robotics Competition
 University of Central Florida Entry for the 2013 AUVSI Foundation s International Aerial Robotics Competition Logan Camacho University of Central Florida, Aerospace Engineering Karl Ravago University of
University of Central Florida Entry for the 2013 AUVSI Foundation s International Aerial Robotics Competition Logan Camacho University of Central Florida, Aerospace Engineering Karl Ravago University of
Design and Implementation of an Autonomous Aerial Vehicle for Information Gathering in a Simulated Autonomous Environment
 Design and Implementation of an Autonomous Aerial Vehicle for Information Gathering in a Simulated Autonomous Environment Nathanael B. Edwards, Cynthia H.T. Edwards, Bradley J. Nelson, Joseph B. Tomlinson
Design and Implementation of an Autonomous Aerial Vehicle for Information Gathering in a Simulated Autonomous Environment Nathanael B. Edwards, Cynthia H.T. Edwards, Bradley J. Nelson, Joseph B. Tomlinson
PRELIMINARY DESIGN REVIEW
 PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
2016 IGVC Design Report Submitted: May 13, 2016
 2016 IGVC Design Report Submitted: May 13, 2016 I certify that the design and engineering of the vehicle by the current student team has been significant and equivalent to what might be awarded credit
2016 IGVC Design Report Submitted: May 13, 2016 I certify that the design and engineering of the vehicle by the current student team has been significant and equivalent to what might be awarded credit
Table of Contents. Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.
 Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.") March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
SAE Aero Design. Apr 29, 2016
 SAE Aero Design Ali Alqalaf, Jasem Alshammari, Dong Yang Cao, Darren Frankenberger, Steven Goettl, and John Santoro Department of Mechanical Engineering Apr 29, 2016 Overview Introduction Need Statement
SAE Aero Design Ali Alqalaf, Jasem Alshammari, Dong Yang Cao, Darren Frankenberger, Steven Goettl, and John Santoro Department of Mechanical Engineering Apr 29, 2016 Overview Introduction Need Statement
Length Height Rotor Diameter Tail Rotor Diameter..12. Tail Boom Length Width
 2.1 Air Vehicle 2.1.1 Vehicle General Description The PA-01 Vapor S-UAV is a rotary wing small unmanned aerial vehicle. The AV is powered by an outrunner 8.5hp class brushless electric motor. The airframe
2.1 Air Vehicle 2.1.1 Vehicle General Description The PA-01 Vapor S-UAV is a rotary wing small unmanned aerial vehicle. The AV is powered by an outrunner 8.5hp class brushless electric motor. The airframe
Product 1 Mini Linear Servo Motor
 Product 1 Mini Linear Servo Motor Stroke : 30mm (50mm & 100mm versions to be released in this year) Force : 20~100N (varies depending on gear ratio.) Position Control (Positional Accuracy 100um) Protocol
Product 1 Mini Linear Servo Motor Stroke : 30mm (50mm & 100mm versions to be released in this year) Force : 20~100N (varies depending on gear ratio.) Position Control (Positional Accuracy 100um) Protocol
Critical Design Report Presentation. Triton. Team 11 February 28, Department of Electrical and Computer Engineering
 Critical Design Report Presentation Triton Team 11 February 28, 2017 Introduction No economical solution for extended underwater monitoring Ecologists from UMass Amherst interested in studying spawning
Critical Design Report Presentation Triton Team 11 February 28, 2017 Introduction No economical solution for extended underwater monitoring Ecologists from UMass Amherst interested in studying spawning
Cilantro. Old Dominion University. Team Members:
 Cilantro Old Dominion University Faculty Advisor: Dr. Lee Belfore Team Captain: Michael Micros lbelfore@odu.edu mmicr001@odu.edu Team Members: Ntiana Sakioti Matthew Phelps Christian Lurhakumbira nsaki001@odu.edu
Cilantro Old Dominion University Faculty Advisor: Dr. Lee Belfore Team Captain: Michael Micros lbelfore@odu.edu mmicr001@odu.edu Team Members: Ntiana Sakioti Matthew Phelps Christian Lurhakumbira nsaki001@odu.edu
Formation Flying Experiments on the Orion-Emerald Mission. Introduction
 Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
An Indoor Aerial Robot for Herding Ground Robots
 An Indoor Aerial Robot for Herding Ground Robots 1 June 2014 Frank Manning Pima Community College Yanitzin Todd Embry-Riddle Aeronautical University, Presott Tim Worden The Boeing Company [1] Abstract
An Indoor Aerial Robot for Herding Ground Robots 1 June 2014 Frank Manning Pima Community College Yanitzin Todd Embry-Riddle Aeronautical University, Presott Tim Worden The Boeing Company [1] Abstract
Homework 3: Design Constraint Analysis and Component Selection Rationale
 Homework 3: Design Constraint Analysis and Component Selection Rationale Team Code Name: ATV (Autonomous Targeting Vehicle Group No. 3 Team Member Completing This Homework: Daniel Barrett E-mail Address
Homework 3: Design Constraint Analysis and Component Selection Rationale Team Code Name: ATV (Autonomous Targeting Vehicle Group No. 3 Team Member Completing This Homework: Daniel Barrett E-mail Address
TABLE OF CONTENTS. Thank you for your interest in CUAir
 SPONSORSHIP INFORMATION 2018-2019 TABLE OF CONTENTS The Team Subteams The Competition Theia II Accomplishments 2019 Air System Outreach Why Contribute Sponsorship Levels 2017-2018 Sponsors Contact Us 3
SPONSORSHIP INFORMATION 2018-2019 TABLE OF CONTENTS The Team Subteams The Competition Theia II Accomplishments 2019 Air System Outreach Why Contribute Sponsorship Levels 2017-2018 Sponsors Contact Us 3
Improvement of hydraulic control quality for deep drawing presses through retrofit
 Improvement of hydraulic control quality for deep drawing presses through retrofit Speaker: M. Helmke TRsystems GmbH 09.03.2016 10 th International Fluid Power Conference Outline & Introduction Outline
Improvement of hydraulic control quality for deep drawing presses through retrofit Speaker: M. Helmke TRsystems GmbH 09.03.2016 10 th International Fluid Power Conference Outline & Introduction Outline
[Kadam*et al., 5(8):August, 2016] ISSN: IC Value: 3.00 Impact Factor: 4.116
![[Kadam*et al., 5(8):August, 2016] ISSN: IC Value: 3.00 Impact Factor: 4.116](/thumbs/90/103495984.jpg "[Kadam*et al., 5(8):August, 2016] ISSN: IC Value: 3.00 Impact Factor: 4.116") IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY VOICE GUIDED DRIVER ASSISTANCE SYSTEM BASED ON RASPBERRY-Pi Sonali Kadam, Sunny Surwade, S.S. Ardhapurkar* * Electronics and telecommunication
IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY VOICE GUIDED DRIVER ASSISTANCE SYSTEM BASED ON RASPBERRY-Pi Sonali Kadam, Sunny Surwade, S.S. Ardhapurkar* * Electronics and telecommunication
Virtual Testing of the Full Vehicle System
 Virtual Testing of the Full Vehicle System Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
Virtual Testing of the Full Vehicle System Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
PFIS Filter Mechanism SPECIFICATION SALT-3130AE VERSION February 2003
 PFIS Filter Mechanism SPECIFICATION SALT-3130AE-00012 VERSION 1.0 16 February 2003 1. Scope 1.1 Identification This document covers the design of the Filter Mechanism for PFIS. In it are detailed the specifications,
PFIS Filter Mechanism SPECIFICATION SALT-3130AE-00012 VERSION 1.0 16 February 2003 1. Scope 1.1 Identification This document covers the design of the Filter Mechanism for PFIS. In it are detailed the specifications,
Oregon State University Autonomous Aerial Robotics Team 2014 International Aerial Robotics Competition
 Oregon State University Autonomous Aerial Robotics Team 2014 International Aerial Robotics Competition Kyle Cesare, Team Lead, cesarek@onid.oregonstate.edu, 208-409-6177 Soo-Hyun Yoo, Ryan McAfee, Nathan
Oregon State University Autonomous Aerial Robotics Team 2014 International Aerial Robotics Competition Kyle Cesare, Team Lead, cesarek@onid.oregonstate.edu, 208-409-6177 Soo-Hyun Yoo, Ryan McAfee, Nathan
Arms, Legs, Wheels, Tracks and What Really Drives Them: Effectors and Actuators. By: J. Islam & Tiffany Stephenson
 Arms, Legs, Wheels, Tracks and What Really Drives Them: Effectors and Actuators By: J. Islam & Tiffany Stephenson Components That Enable A Robots Actions Effector: Device that makes impact/influence on
Arms, Legs, Wheels, Tracks and What Really Drives Them: Effectors and Actuators By: J. Islam & Tiffany Stephenson Components That Enable A Robots Actions Effector: Device that makes impact/influence on
Design and Development of South Dakota School of Mines and Technology s Aerial Robotic Reconnaissance System
 Design and Development of South Dakota School of Mines and Technology s Aerial Robotic Reconnaissance System Raunaq Bhushan, John Heiberger, Adam Helmers, Brian Jensen, Jacob Oursland, Mason Pluimer, Justin
Design and Development of South Dakota School of Mines and Technology s Aerial Robotic Reconnaissance System Raunaq Bhushan, John Heiberger, Adam Helmers, Brian Jensen, Jacob Oursland, Mason Pluimer, Justin
UC Berkeley Space Technologies and Rocketry Preliminary Design Review Presentation. Access Control: CalSTAR Public Access
 UC Berkeley Space Technologies and Rocketry Preliminary Design Review Presentation Access Control: CalSTAR Public Access Agenda Airframe Propulsion Payload Recovery Safety Outreach Project Plan Airframe
UC Berkeley Space Technologies and Rocketry Preliminary Design Review Presentation Access Control: CalSTAR Public Access Agenda Airframe Propulsion Payload Recovery Safety Outreach Project Plan Airframe
Design Specification and UI Interface for Automated Cart Delivery System
 Design Specification and UI Interface for Automated Cart Delivery System Project Team: Eason Tsai Benjamin Tsai Jacky Teng Contact Person: Benjamin Tsai syt8@sfu.ca Submitted to: Dr. Andrew Rawicz - ENSC
Design Specification and UI Interface for Automated Cart Delivery System Project Team: Eason Tsai Benjamin Tsai Jacky Teng Contact Person: Benjamin Tsai syt8@sfu.ca Submitted to: Dr. Andrew Rawicz - ENSC
Unmanned Aerial Vehicle Design, Development, and Implementation
 Unmanned Aerial Vehicle Design, Development, and Implementation Faculty Advisor Dr. David Schmidt Team Members Patrick Herklotz, Shane Kirkbride, Mike Kopps, Mark Kraska, John Ordeman, Erica Rygg, Matt
Unmanned Aerial Vehicle Design, Development, and Implementation Faculty Advisor Dr. David Schmidt Team Members Patrick Herklotz, Shane Kirkbride, Mike Kopps, Mark Kraska, John Ordeman, Erica Rygg, Matt
CRASH TEST REPORT FOR PERIMETER BARRIERS AND GATES TESTED TO SD-STD-02.01, REVISION A, MARCH Anti-Ram Bollards
 CRASH TEST REPORT FOR PERIMETER BARRIERS AND GATES TESTED TO SD-STD-02.01, REVISION A, MARCH 2003 Anti-Ram Bollards Prepared for: RSA Protective Technologies, LLC 1573 Mimosa Court Upland, CA 91784 Test
CRASH TEST REPORT FOR PERIMETER BARRIERS AND GATES TESTED TO SD-STD-02.01, REVISION A, MARCH 2003 Anti-Ram Bollards Prepared for: RSA Protective Technologies, LLC 1573 Mimosa Court Upland, CA 91784 Test
Technical Robustness and Quality
 Technical Robustness and Quality www.teamrush27.net Rock Solid Robot Page Title 1-4 Robustness In Concept And Fabrication 5 Creative Concepts For Tomorrow s Technology 6-8 Rock Solid Controls 9-10 Effectively
Technical Robustness and Quality www.teamrush27.net Rock Solid Robot Page Title 1-4 Robustness In Concept And Fabrication 5 Creative Concepts For Tomorrow s Technology 6-8 Rock Solid Controls 9-10 Effectively
Mobile Rescue Robot based on the RoboCup Rescue (NIST) Standards
 Standards") University of Manitoba Department of Electrical & Computer Engineering ECE 4600 Group Design Project Progress Report Mobile Rescue Robot based on the RoboCup Rescue (NIST) Standards by Group 05 Justin
University of Manitoba Department of Electrical & Computer Engineering ECE 4600 Group Design Project Progress Report Mobile Rescue Robot based on the RoboCup Rescue (NIST) Standards by Group 05 Justin
CRASH TEST REPORT FOR PERIMETER BARRIERS AND GATES TESTED TO SD-STD-02.01, REVISION A, MARCH Anti-Ram Bollards
 CRASH TEST REPORT FOR PERIMETER BARRIERS AND GATES TESTED TO SD-STD-02.01, REVISION A, MARCH 2003 Anti-Ram Bollards Prepared for: RSA Protective Technologies, LLC 1573 Mimosa Court Upland, CA 91784 Test
CRASH TEST REPORT FOR PERIMETER BARRIERS AND GATES TESTED TO SD-STD-02.01, REVISION A, MARCH 2003 Anti-Ram Bollards Prepared for: RSA Protective Technologies, LLC 1573 Mimosa Court Upland, CA 91784 Test
Concept Generation and Selection
 Shell Eco-Marathon Concept Generation and Selection Abdul Alshodokhi, John Gamble, Nik Glassy, Travis Moore October 28th 2013 Overview Project Overview Braking Concepts Drivetrain Concepts Engine Concepts
Shell Eco-Marathon Concept Generation and Selection Abdul Alshodokhi, John Gamble, Nik Glassy, Travis Moore October 28th 2013 Overview Project Overview Braking Concepts Drivetrain Concepts Engine Concepts
MECH 486A - Senior Design Practicum Critical Design Review. Annemarie Kibbe, Cameron Ghia, Jiaxin Zhao, Mark Stratford, Michael McMann, Ryan Jensen
 MECH 486A - Senior Design Practicum Critical Design Review Annemarie Kibbe, Cameron Ghia, Jiaxin Zhao, Mark Stratford, Michael McMann, Ryan Jensen 1 Content Introduction Design Problem Analysis Design
MECH 486A - Senior Design Practicum Critical Design Review Annemarie Kibbe, Cameron Ghia, Jiaxin Zhao, Mark Stratford, Michael McMann, Ryan Jensen 1 Content Introduction Design Problem Analysis Design
DESIGN AND DEVELOPMENT OF A SUSPENSION SYSTEM USED IN ROUGH- TERRAIN VEHICLE CONTROL FOR VIBRATION SUPPRESSION IN PLANETARY EXPLORATION
 DESIGN AND DEVELOPMENT OF A SUSPENSION SYSTEM USED IN ROUGH- TERRAIN VEHICLE CONTROL FOR VIBRATION SUPPRESSION IN PLANETARY EXPLORATION Arvin Niro College of Engineering University of Hawaiʽi at Mānoa
DESIGN AND DEVELOPMENT OF A SUSPENSION SYSTEM USED IN ROUGH- TERRAIN VEHICLE CONTROL FOR VIBRATION SUPPRESSION IN PLANETARY EXPLORATION Arvin Niro College of Engineering University of Hawaiʽi at Mānoa
Modular Reconfigurable Spacecraft Small Rocket/Spacecraft Technology Platform SMART
 Modular Reconfigurable Spacecraft Small Rocket/Spacecraft Technology Platform SMART Micro-Spacecraft Prototype Demonstrates Modular Open Systems Architecture for Fast Life-Cycle Missions Jaime Esper *,
Modular Reconfigurable Spacecraft Small Rocket/Spacecraft Technology Platform SMART Micro-Spacecraft Prototype Demonstrates Modular Open Systems Architecture for Fast Life-Cycle Missions Jaime Esper *,
Sabertooth A Hybrid AUV/ROV offshore system. Jan Siesjö Chief Engineer
 Sabertooth A Hybrid AUV/ROV offshore system Jan Siesjö Chief Engineer jan.siesjo@saabgroup.com SAAB WORLDWIDE Employees 2010 Sweden 10,372 South Africa 1,086 Australia 349 USA 194 Great Britain 117 Finland
Sabertooth A Hybrid AUV/ROV offshore system Jan Siesjö Chief Engineer jan.siesjo@saabgroup.com SAAB WORLDWIDE Employees 2010 Sweden 10,372 South Africa 1,086 Australia 349 USA 194 Great Britain 117 Finland
Vehicle Control Using Raspberrypi and Image Processing
 Vehicle Control Using Raspberrypi and Image Processing Rohit Tiwari 1 Dushyant Kumar Singh 2 Lovely Professonal University, Punjab. Abstract The objective of the proposed work is to implement the available
Vehicle Control Using Raspberrypi and Image Processing Rohit Tiwari 1 Dushyant Kumar Singh 2 Lovely Professonal University, Punjab. Abstract The objective of the proposed work is to implement the available
Princess Sumaya University for Technology
 IGVC2014-E500 Princess Sumaya University for Technology Hamza Al-Beeshawi, Enas Al-Zmaili Raghad Al-Harasis, Moath Shreim Jamille Abu Shash Faculty Name:Dr. Belal Sababha Email:b.sababha@psut.edu.jo I
IGVC2014-E500 Princess Sumaya University for Technology Hamza Al-Beeshawi, Enas Al-Zmaili Raghad Al-Harasis, Moath Shreim Jamille Abu Shash Faculty Name:Dr. Belal Sababha Email:b.sababha@psut.edu.jo I
FlexCore Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft
 FlexCore Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft Dan Hegel Director, Advanced Development Blue Canyon Technologies hegel@bluecanyontech.com BCT Overview BCT
FlexCore Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft Dan Hegel Director, Advanced Development Blue Canyon Technologies hegel@bluecanyontech.com BCT Overview BCT