Autonomous Ground Vehicle
|
|
|
- Linette Perry
- 5 years ago
- Views:
Transcription
1 Autonomous Ground Vehicle Senior Design Project EE Anshul Tandon Brandon Nason Brian Aidoo Eric Leefe Advisors: ME Donald Lee Hardee Ivan Bolanos Wilfredo Caceres Mr. Bryan Audiffred Dr. Michael C. Murphy
2 IGVC - History and Description June 8-11, 2007 in Rochester, Michigan, hosted by Oakland University Autonomous Ground Vehicle Competition Autonomous Challenge Design Challenge Navigation Challenge
3 Organization Chart Software Control Sensor Vision Speed Control Steering E-Stop Motor Navigation Propulsion Frame Power Traction Body Material Recharging Battery

4 Camera Requirements Lane & Pothole Detection Part Specification ImagingSource DFK 21F04 (Firewire) Orientation 5.5 high Front of vehicle Tilted downwards approx 60 Image
5 Rangefinder Requirements Obstacle Detection Part Specification SICK LMS 291 (RS-232) Orientation 1 high Front of vehicle Horizontal to ground Image
 Interface: serial Housing w/ prefabricated connections NMEA")
6 GPS Unit Requirement Give accurate position Magellan DG14 Sensor Accuracy: 70 cm (with differential signal) Interface: serial Housing w/ prefabricated connections NMEA protocol

7 Digital Compass Requirement Give accurate heading KVH Azimuth 1000 Accuracy: 0.5 degree Serial interface NMEA protocol
8 Propulsion Motors Selection Weight Acceleration Driving wheels Wheel Radius Coefficient of rolling friction Linear and angular speed
9 RPM Propulsion OUTPUT SHAFT RPM vs LIN VEL (r = m = 6in) LIN VEL (m/s) Speed Limit = 5mph = 2.234m/s
10 Tq (N-m) Torque Required TORQUE VS VEHICLE WEIGHT Ur COEFF= 0.04 Ur COEFF= 0.05 Ur COEFF=0.08 Ur COEFF=0.09 Ur COEFF= W (Kg)
11 Tq (N-m) Torque Required TORQUE VS VEHICLE WEIGHT 17 DEG INCLINE Ur COEFF= W (Kg)

12 Propulsion The motor we selected is the NPC R-82
13 RPM Propulsion RPM vs.torque Torque (N-m)
14 Current (amps) Propulsion Current vs. Torque Torque (N-m)

15 Motor Controller AX3500BP Current Requirements Motor current: 40 A Max continuous controller current: 60 A Serial-to-PWM converter Controls both motors Accepts feedback PID control
16 Control Loop - Block Diagram CPU AX3500BP Motor 1 Motor 2
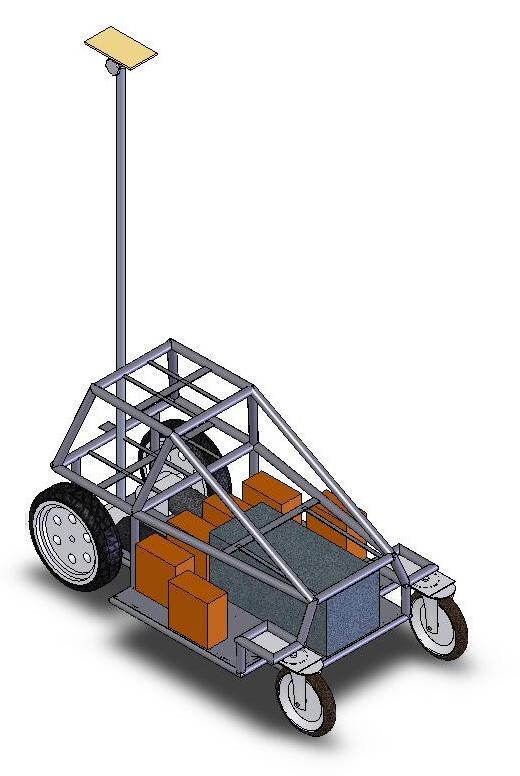
17 Traction and Steering Requirements Low cost Reliability Low weight Low turning radius Max speed of 5 mph Stability Good traction in grass and sand Solutions Four wheels with rack and pinion steering Track with differential steering Wheels with differential steering (Chosen)

18 Traction and Steering
19 Power System Design Batteries 6 Powersonic Sealed Lead-Acid Batteries Calculated battery life = 3 Hours Charging 2 Battery Tender Multibank Chargers Monitoring Serial Voltmeter Software
20 Power System Layout Camera 12V 11.28W Computer 12V 90W 12V/24V Battery Bank for Sensing and Processing Box for Electrical Wiring, Fuses, Converter, and Regulator Laser Range Finder 24V 20W Digital Compass 12V 0.1W GPS Unit 12V 3.7W 24V Battery Bank for Motors Motors 24V Variable Power
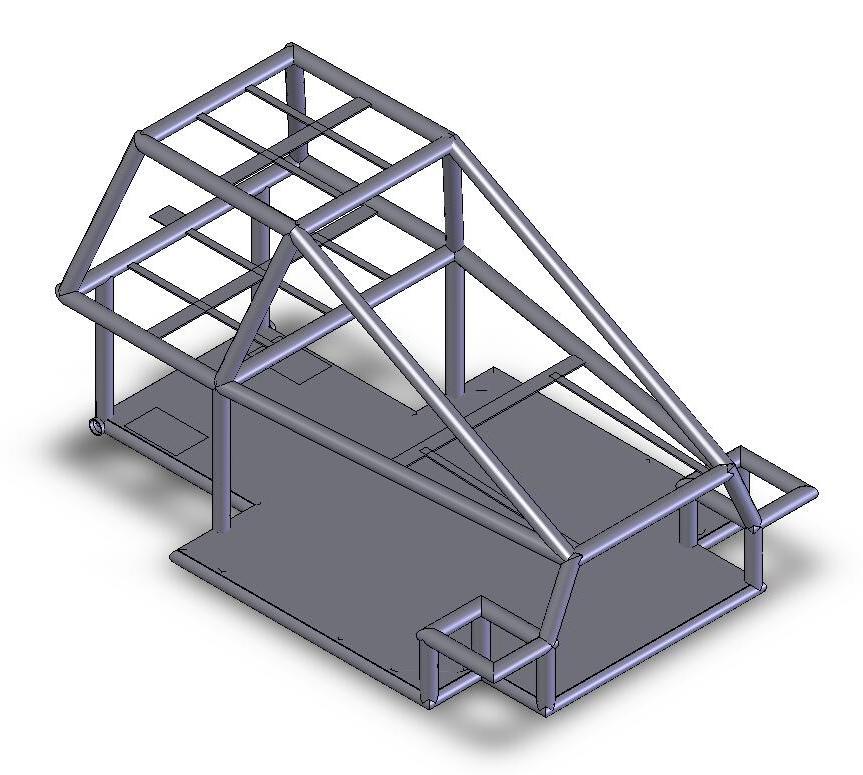
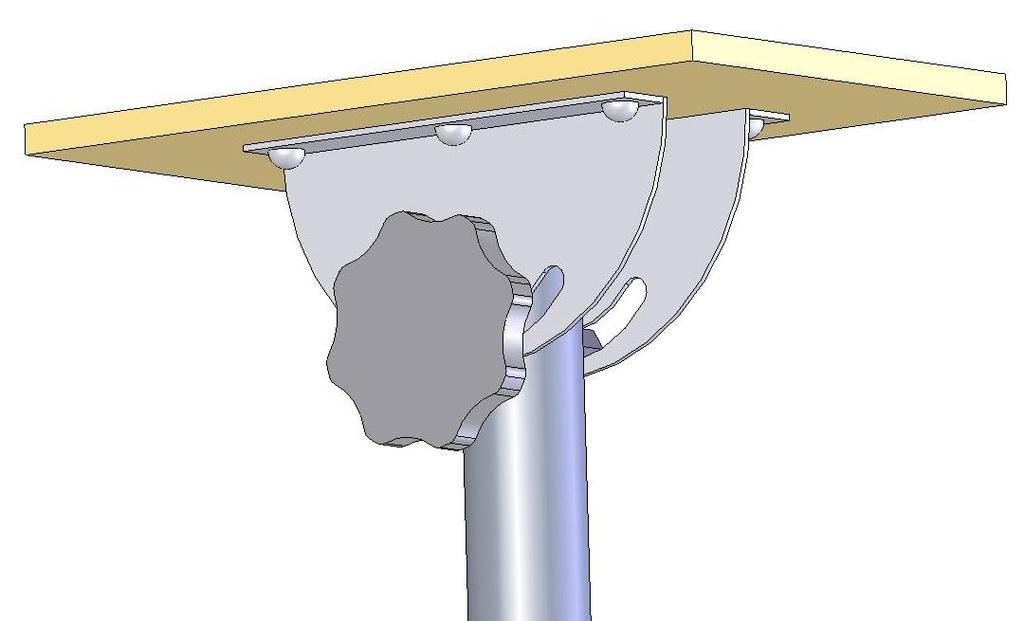
21 Frame Design Material Strength Elasticity (bending deflection) Cost Weight Weldability Design Layout Dimension Requirements Water Resistance Center of Gravity Component Mounting


22 Frame Design ANSI 1020 Yield Strength ~ 51,000 psi Maximum stress on vehicle is 4,700 psi Lowest FOS = 10.7 Coated Polyester Lightweight Breathable Inexpensive Cost Efficient
23 Component Positioning
24 Component Positioning
25 Component Positioning
26 Component Positioning
27 Component Positioning
28 Component Positioning

29 FEA - Stress and Deformation Maximum Stress = 4,700 psi Average Stress = 2,300 psi


30 FEA - Stress and Deformation Maximum Deflection = in Average Deflection = in

31 Processing Personal Computer GPU Acceleration OpenVIDIA Graphics Library C Programming Language Multithreading
32 Processing Encoder Motor Controller Motor GPS Rangefinder Computer Compass Camera Monitor Keyboard
33 Software Flow Chart Initial State Gather data Camera Rangefinder GPS Unit Compass Store Data Get Direction Move Vehicle






34 Navigation Algorithm Gather data from sensors Identify target directions Process GPS coordinates Determine heading correction Send direction to motor controllers

35 Lane & Pothole Detection Capture image from camera Convert image to B/W Downscale image Detect white pixel chains Detect white pixel areas Determine direction

36 Obstacle Detection Get image from rangefinder Determine distance to obstacles Determine optimal direction


37 Emergency Stop RF Communication 433MHz 250ft Transmitter Receiver Transmitter Receiver E-Stop Motors
38 Budget Category Part Cost Category Total Navigation LRF 6,000 Camera 250 GPS 3,700 Compass ,350 Power Batteries Propulsion Wheels 300 Motors 1,050 1,350 Frame Tubing Processing On-Board CPU 1,185 1,185 TOTAL ~13,500




39 AGV - Past Competitions Images
40 Summary Navigation Camera Laser rangefinder Differential GPS Unit Central Processing Unit Propulsion DC motors Wheels Power Rechargeable efficient batteries Frame Strong, light material
41 Questions / Suggestions Contact area experts Navigation -Vision Anshul Tandon Navigation - GPS Eric Leefe Propulsion Ivan Bolanos Propulsion Wilfredo Caceres Power Brian Aidoo Frame Donald Lee Hardee Processing Brandon Nason Sponsors:
GCAT. University of Michigan-Dearborn
 GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
The College of New Jersey
 The College of New Jersey 2008 Intelligent Ground Vehicle Competition Entry Saturday May 31 st, 2008 Team Members: Jerry Wallace Brian Fay Michael Ziller Chapter 1 - Mechanical Systems (Brian Fay) 1.1
The College of New Jersey 2008 Intelligent Ground Vehicle Competition Entry Saturday May 31 st, 2008 Team Members: Jerry Wallace Brian Fay Michael Ziller Chapter 1 - Mechanical Systems (Brian Fay) 1.1
Princess Sumaya University for Technology
 IGVC2014-E500 Princess Sumaya University for Technology Hamza Al-Beeshawi, Enas Al-Zmaili Raghad Al-Harasis, Moath Shreim Jamille Abu Shash Faculty Name:Dr. Belal Sababha Email:b.sababha@psut.edu.jo I
IGVC2014-E500 Princess Sumaya University for Technology Hamza Al-Beeshawi, Enas Al-Zmaili Raghad Al-Harasis, Moath Shreim Jamille Abu Shash Faculty Name:Dr. Belal Sababha Email:b.sababha@psut.edu.jo I
UMD-SMART: Un-Manned Differentially Steered Multi-purpose. GCAT: GPS enabled Conventional-steered Autonomous Transporter
 UMD-SMART: Un-Manned Differentially Steered Multi-purpose Autonomous Robust Transporter And GCAT: GPS enabled Conventional-steered Autonomous Transporter V. Varghese, S. Makam, M. Cinpinski, E.Mordovanaki,
UMD-SMART: Un-Manned Differentially Steered Multi-purpose Autonomous Robust Transporter And GCAT: GPS enabled Conventional-steered Autonomous Transporter V. Varghese, S. Makam, M. Cinpinski, E.Mordovanaki,
Club Capra- Minotaurus Design Report
 Table of content Introduction... 3 Team... 3 Cost... 4 Mechanical design... 4 Structure of Minotaurus... 5 Drive train... 6 Electronics... 7 Batteries... 7 Power supply... 7 System signal processing...
Table of content Introduction... 3 Team... 3 Cost... 4 Mechanical design... 4 Structure of Minotaurus... 5 Drive train... 6 Electronics... 7 Batteries... 7 Power supply... 7 System signal processing...
TENNESSEE STATE UNIVERSITY COLLEGE OF ENGINEERING, TECHNOLOGY AND COMPUTER SCIENCE
 TENNESSEE STATE UNIVERSITY COLLEGE OF ENGINEERING, TECHNOLOGY AND COMPUTER SCIENCE PRESENTS TSU-TIGER An Autonomous Robotic Ground Vehicle Technical Report 10 th Intelligent Ground Vehicle Competition
TENNESSEE STATE UNIVERSITY COLLEGE OF ENGINEERING, TECHNOLOGY AND COMPUTER SCIENCE PRESENTS TSU-TIGER An Autonomous Robotic Ground Vehicle Technical Report 10 th Intelligent Ground Vehicle Competition
N.J.A.V. (New Jersey Autonomous Vehicle) 2013 Intelligent Ground Vehicle Competition
 2013 Intelligent Ground Vehicle Competition") N.J.A.V. (New Jersey Autonomous Vehicle) 2013 Intelligent Ground Vehicle Competition Department of Mechanical Engineering The College of New Jersey Ewing, New Jersey Team Members: Michael Bauer, Christopher
N.J.A.V. (New Jersey Autonomous Vehicle) 2013 Intelligent Ground Vehicle Competition Department of Mechanical Engineering The College of New Jersey Ewing, New Jersey Team Members: Michael Bauer, Christopher
INTRODUCTION Team Composition Electrical System
 IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
2016 IGVC Design Report Submitted: May 13, 2016
 2016 IGVC Design Report Submitted: May 13, 2016 I certify that the design and engineering of the vehicle by the current student team has been significant and equivalent to what might be awarded credit
2016 IGVC Design Report Submitted: May 13, 2016 I certify that the design and engineering of the vehicle by the current student team has been significant and equivalent to what might be awarded credit
Oakland University Presents:
 Oakland University Presents: I certify that the engineering design present in this vehicle is significant and equivalent to work that would satisfy the requirements of a senior design or graduate project
Oakland University Presents: I certify that the engineering design present in this vehicle is significant and equivalent to work that would satisfy the requirements of a senior design or graduate project
Autonomous Vehicle Team Of Virginia Tech
 2001 2002 Autonomous Vehicle Team Of Virginia Tech Team members: Eric Slominski Joong-Kyoo Park Christopher Terwelp Patrick Forman Ian Hovey Jared Mach Joseph Roan Merritt Draney Required Faculty Advisor
2001 2002 Autonomous Vehicle Team Of Virginia Tech Team members: Eric Slominski Joong-Kyoo Park Christopher Terwelp Patrick Forman Ian Hovey Jared Mach Joseph Roan Merritt Draney Required Faculty Advisor
UNIVERSITÉ DE MONCTON FACULTÉ D INGÉNIERIE. Moncton, NB, Canada PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY
 FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
NJAV New Jersey Autonomous Vehicle
 The Autonomous Vehicle Team from TCNJ Presents: NJAV New Jersey Autonomous Vehicle Team Members Mark Adkins, Cynthia De Rama, Jodie Hicks, Kristen Izganics, Christopher Macock, Stephen Saudargas, Brett
The Autonomous Vehicle Team from TCNJ Presents: NJAV New Jersey Autonomous Vehicle Team Members Mark Adkins, Cynthia De Rama, Jodie Hicks, Kristen Izganics, Christopher Macock, Stephen Saudargas, Brett
Daedalus Autonomous Vehicle
 Daedalus Autonomous Vehicle June 20, 2002 Team Members: Nicole Anthony Byron Collins Michael Fleming Chuck Liebal Michelle Nicholas Matthew Schmid Required Statement from Faculty Advisor I, Dr. Charles
Daedalus Autonomous Vehicle June 20, 2002 Team Members: Nicole Anthony Byron Collins Michael Fleming Chuck Liebal Michelle Nicholas Matthew Schmid Required Statement from Faculty Advisor I, Dr. Charles
Detailed Design Review
 Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
THIRTEENTH ANNUAL INTERNATIONAL GROUND VEHICLE COMPETITION. Design Report
 THIRTEENTH ANNUAL INTERNATIONAL GROUND VEHICLE COMPETITION ALVIN-VI Design Report Susmita Bhandari, Matthew Gillette, Sam Lin, Bozidar Marinkovic, David Pietrocola, Maria Restrepo, Regardt Schonborn, Advisor
THIRTEENTH ANNUAL INTERNATIONAL GROUND VEHICLE COMPETITION ALVIN-VI Design Report Susmita Bhandari, Matthew Gillette, Sam Lin, Bozidar Marinkovic, David Pietrocola, Maria Restrepo, Regardt Schonborn, Advisor
Technical Robustness and Quality
 Technical Robustness and Quality www.teamrush27.net Rock Solid Robot Page Title 1-4 Robustness In Concept And Fabrication 5 Creative Concepts For Tomorrow s Technology 6-8 Rock Solid Controls 9-10 Effectively
Technical Robustness and Quality www.teamrush27.net Rock Solid Robot Page Title 1-4 Robustness In Concept And Fabrication 5 Creative Concepts For Tomorrow s Technology 6-8 Rock Solid Controls 9-10 Effectively
Calvin College Automated Designated Driver 2005 Intelligent Ground Vehicle Competition Design Report
 Calvin College Automated Designated Driver 2005 Intelligent Ground Vehicle Competition Design Report Paul Bakker -- Brian Bouma -- Matthew Husson -- Daniel Russcher -- Nathan Studer Team Advisor: Professor
Calvin College Automated Designated Driver 2005 Intelligent Ground Vehicle Competition Design Report Paul Bakker -- Brian Bouma -- Matthew Husson -- Daniel Russcher -- Nathan Studer Team Advisor: Professor
Closing Sale Prices. AmigoBot Pioneer 3-DX Pioneer 3-AT Pioneer LX Pioneer Manipulator PeopleBot PowerBot Seekur Jr
 10 Columbia Drive Amherst, NH 03031 USA T. +1.603.881.7960 F. +1.603.881.3818 www.mobilerobots.com Closing Prices 90 Day Warranty on all s Limited Quantities Available Models AmigoBot Pioneer 3-DX Pioneer
10 Columbia Drive Amherst, NH 03031 USA T. +1.603.881.7960 F. +1.603.881.3818 www.mobilerobots.com Closing Prices 90 Day Warranty on all s Limited Quantities Available Models AmigoBot Pioneer 3-DX Pioneer
Centurion Vehicle Design Report Bluefield State College Ground Robotic Vehicle Team, July 2002
 Centurion Vehicle Design Report Bluefield State College Ground Robotic Vehicle Team, July 2002 Faculty Advisor Dr. Robert Riggins Professor of Electrical Engineering Technology Bluefield State College
Centurion Vehicle Design Report Bluefield State College Ground Robotic Vehicle Team, July 2002 Faculty Advisor Dr. Robert Riggins Professor of Electrical Engineering Technology Bluefield State College
Team Members. Sean Baity, Michael Chaney, Jacob Dillow, Jessica Greene, Andrew Skidmore, Matt Swean, John Paul Thomas, Nathan Welch, Brent Weigel
 Team Members Sean Baity, Michael Chaney, Jacob Dillow, Jessica Greene, Andrew Skidmore, Matt Swean, John Paul Thomas, Nathan Welch, Brent Weigel Graduate Student Advisors Andrew Bacha, Ankur Naik, Michael
Team Members Sean Baity, Michael Chaney, Jacob Dillow, Jessica Greene, Andrew Skidmore, Matt Swean, John Paul Thomas, Nathan Welch, Brent Weigel Graduate Student Advisors Andrew Bacha, Ankur Naik, Michael
Gemini 2005 Design Report
 Gemini 2005 Design Report Team Members Sean Baity, Andrew Bacha, David Eargle, Brett Gombar, Jake Green, Bobby Mott, Colin Todd, Jon Weekley Required Faculty Advisor Statement I certify that the engineering
Gemini 2005 Design Report Team Members Sean Baity, Andrew Bacha, David Eargle, Brett Gombar, Jake Green, Bobby Mott, Colin Todd, Jon Weekley Required Faculty Advisor Statement I certify that the engineering
1 INTRODUCTION 2 DESIGN PROCESS. 2.1 Target Customers
 The Virginia Tech Autonomous Vehicle Team presents: Required Faculty Advisor Statement I certify that the engineering design of the updated vehicle described in this report, Johnny-5, has been significant,
The Virginia Tech Autonomous Vehicle Team presents: Required Faculty Advisor Statement I certify that the engineering design of the updated vehicle described in this report, Johnny-5, has been significant,
Autonomously Controlled Front Loader Senior Project Proposal
 Autonomously Controlled Front Loader Senior Project Proposal by Steven Koopman and Jerred Peterson Submitted to: Dr. Schertz, Dr. Anakwa EE 451 Senior Capstone Project December 13, 2007 Project Summary:
Autonomously Controlled Front Loader Senior Project Proposal by Steven Koopman and Jerred Peterson Submitted to: Dr. Schertz, Dr. Anakwa EE 451 Senior Capstone Project December 13, 2007 Project Summary:
Conversion of a Conventional Electric Automobile Into an Unmanned Ground Vehicle (UGV) University, Istanbul, Turkey. University, Istanbul, Turkey
 University, Istanbul, Turkey. University, Istanbul, Turkey") Proceedings of the 2011 IEEE International Conference on Mechatronics April 13-15, 2011, Istanbul, Turkey Conversion of a Conventional Electric Automobile Into an Unmanned Ground Vehicle (UGV) Volkan Sezer
Proceedings of the 2011 IEEE International Conference on Mechatronics April 13-15, 2011, Istanbul, Turkey Conversion of a Conventional Electric Automobile Into an Unmanned Ground Vehicle (UGV) Volkan Sezer
Active Driver Assistance for Vehicle Lanekeeping
 Active Driver Assistance for Vehicle Lanekeeping Eric J. Rossetter October 30, 2003 D D L ynamic esign aboratory Motivation In 2001, 43% of all vehicle fatalities in the U.S. were caused by a collision
Active Driver Assistance for Vehicle Lanekeeping Eric J. Rossetter October 30, 2003 D D L ynamic esign aboratory Motivation In 2001, 43% of all vehicle fatalities in the U.S. were caused by a collision
UAV KF-1 helicopter. CopterCam UAV KF-1 helicopter specification
 UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
LTU Challenger. TEAM MEMBERS: Andrey Chernolutskiy Vincent Shih-Nung Chen. Faculty Advisor's Statement:
 LTU Challenger TEAM MEMBERS: Andrey Chernolutskiy Vincent Shih-Nung Chen Faculty Advisor's Statement: The work that the LTU Challenger student team performed with regards to design and implementation was
LTU Challenger TEAM MEMBERS: Andrey Chernolutskiy Vincent Shih-Nung Chen Faculty Advisor's Statement: The work that the LTU Challenger student team performed with regards to design and implementation was
Pothole Tracker. Muhammad Mir. Daniel Chin. Mike Catalano. Bill Quigg Advisor: Professor Ciesielski
 Pothole Tracker Muhammad Mir. Daniel Chin. Mike Catalano. Bill Quigg Advisor: Professor Ciesielski Pothole Tracker Muhammad Mir CSE Team 5 Daniel Chin CSE Mike Catalano EE Bill Quigg EE Why are Potholes
Pothole Tracker Muhammad Mir. Daniel Chin. Mike Catalano. Bill Quigg Advisor: Professor Ciesielski Pothole Tracker Muhammad Mir CSE Team 5 Daniel Chin CSE Mike Catalano EE Bill Quigg EE Why are Potholes
Robotic Vehicle Challenge
 Robotic Vehicle Challenge Hello and welcome to your first team challenge! Within this document you will find information about what to expect and prepare for to be successful in your first challenge. In
Robotic Vehicle Challenge Hello and welcome to your first team challenge! Within this document you will find information about what to expect and prepare for to be successful in your first challenge. In
Centurion II Vehicle Design Report Bluefield State College
 Centurion II Vehicle Design Report Bluefield State College Ground Robotic Vehicle Team, May 2003 I, Dr. Robert Riggins,Professor of the Electrical Engineering Technology Department at Bluefield State College
Centurion II Vehicle Design Report Bluefield State College Ground Robotic Vehicle Team, May 2003 I, Dr. Robert Riggins,Professor of the Electrical Engineering Technology Department at Bluefield State College
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
K.I.T.T. KINEMATIC INTELLIGENT TACTICAL TECHNOLOGY
 4/4/2011 SVSU K.I.T.T. KINEMATIC INTELLIGENT TACTICAL TECHNOLOGY Team Members Bryant Barnes Addney Biery Paul List Matthew Plachta Advisor Russell Clark Faculty Advisor Statement I certify that the engineering
4/4/2011 SVSU K.I.T.T. KINEMATIC INTELLIGENT TACTICAL TECHNOLOGY Team Members Bryant Barnes Addney Biery Paul List Matthew Plachta Advisor Russell Clark Faculty Advisor Statement I certify that the engineering
Technical Paper DARPA Grand Challenge 2005
 Technical Paper DARPA Grand Challenge 2005 Team UCF University of Central Florida 4000 Central Florida Blvd. Orlando, FL 32816 Phone: 407 823-2341 Team Leader: Don Harper harper@cs.ucf.edu Team Members:
Technical Paper DARPA Grand Challenge 2005 Team UCF University of Central Florida 4000 Central Florida Blvd. Orlando, FL 32816 Phone: 407 823-2341 Team Leader: Don Harper harper@cs.ucf.edu Team Members:
Cilantro. Old Dominion University. Team Members:
 Cilantro Old Dominion University Faculty Advisor: Dr. Lee Belfore Team Captain: Michael Micros lbelfore@odu.edu mmicr001@odu.edu Team Members: Ntiana Sakioti Matthew Phelps Christian Lurhakumbira nsaki001@odu.edu
Cilantro Old Dominion University Faculty Advisor: Dr. Lee Belfore Team Captain: Michael Micros lbelfore@odu.edu mmicr001@odu.edu Team Members: Ntiana Sakioti Matthew Phelps Christian Lurhakumbira nsaki001@odu.edu
Full Vehicle Simulation for Electrification and Automated Driving Applications
 Full Vehicle Simulation for Electrification and Automated Driving Applications Vijayalayan R & Prasanna Deshpande Control Design Application Engineering 2015 The MathWorks, Inc. 1 Key Trends in Automotive
Full Vehicle Simulation for Electrification and Automated Driving Applications Vijayalayan R & Prasanna Deshpande Control Design Application Engineering 2015 The MathWorks, Inc. 1 Key Trends in Automotive
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition
 Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Faculty Advisor Statement. Penn State Robotics Club
 Al Penn State Robotics Club Faculty Advisor Statement I, Sean N. Brennan, certify that the design and development of Al has been significant, and that each student performing this work is a registered
Al Penn State Robotics Club Faculty Advisor Statement I, Sean N. Brennan, certify that the design and development of Al has been significant, and that each student performing this work is a registered
RB-Mel-03. SCITOS G5 Mobile Platform Complete Package
 RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
PATH TO SUCCESS: AN ANALYSIS OF 2016 INTELLIGENT GROUND VEHICLE COMPETITION (IGVC) AUTONOMOUS VEHICLE DESIGN AND IMPLEMENTATION
 AUTONOMOUS VEHICLE DESIGN AND IMPLEMENTATION") GVSETS 2016 PATH TO SUCCESS: AN ANALYSIS OF 2016 INTELLIGENT GROUND VEHICLE COMPETITION (IGVC) AUTONOMOUS VEHICLE DESIGN AND IMPLEMENTATION Andrew Kosinski US Army TARDEC Bernard Theisen 586-574-8750 bernard.theisens.army.mil
GVSETS 2016 PATH TO SUCCESS: AN ANALYSIS OF 2016 INTELLIGENT GROUND VEHICLE COMPETITION (IGVC) AUTONOMOUS VEHICLE DESIGN AND IMPLEMENTATION Andrew Kosinski US Army TARDEC Bernard Theisen 586-574-8750 bernard.theisens.army.mil
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Your vehicle, our navigation. ANT - Autonomous Navigation Technology
 Your vehicle, our navigation ANT - Autonomous Navigation Technology ANT allows your vehicle to localize and navigate completely autonomously. Installation process ANT is environment based ANT uses natural
Your vehicle, our navigation ANT - Autonomous Navigation Technology ANT allows your vehicle to localize and navigate completely autonomously. Installation process ANT is environment based ANT uses natural
TSU-TIGER An Autonomous Robotic Ground Vehicle Technical Report
 TENNESSEE STATE UNIVERSITY COLLEGE OF ENGINEERING AND TECHNOLOGY PRESENTS TSU-TIGER An Autonomous Robotic Ground Vehicle Technical Report Submitted to: Eighth Annual International Ground Robotics Competition
TENNESSEE STATE UNIVERSITY COLLEGE OF ENGINEERING AND TECHNOLOGY PRESENTS TSU-TIGER An Autonomous Robotic Ground Vehicle Technical Report Submitted to: Eighth Annual International Ground Robotics Competition
Control of Mobile Robots
 Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Sól Dual Voltage Buck Boost Solar Charge Controller Connection & Operation V1.00
 Sól Dual Voltage Buck Boost Solar Charge Controller Connection & Operation V1.00 Connection Instructions Remove Bottom 4 cover to attach wires to terminal blocks then attach cover and flip over for mounting
Sól Dual Voltage Buck Boost Solar Charge Controller Connection & Operation V1.00 Connection Instructions Remove Bottom 4 cover to attach wires to terminal blocks then attach cover and flip over for mounting
2015 The MathWorks, Inc. 1
 2015 The MathWorks, Inc. 1 [Subtrack 2] Vehicle Dynamics Blockset 소개 김종헌부장 2015 The MathWorks, Inc. 2 Agenda What is Vehicle Dynamics Blockset? How can I use it? 3 Agenda What is Vehicle Dynamics Blockset?
2015 The MathWorks, Inc. 1 [Subtrack 2] Vehicle Dynamics Blockset 소개 김종헌부장 2015 The MathWorks, Inc. 2 Agenda What is Vehicle Dynamics Blockset? How can I use it? 3 Agenda What is Vehicle Dynamics Blockset?
Vehicle Design Competition Written Report NECTAR 2000
 8th Intelligent Ground Vehicle Competition Vehicle Design Competition Written Report NECTAR 2000 Actually, we would like to taste the NECTAR after winning the first prize in 2000. Watanabe Laboratory Systems
8th Intelligent Ground Vehicle Competition Vehicle Design Competition Written Report NECTAR 2000 Actually, we would like to taste the NECTAR after winning the first prize in 2000. Watanabe Laboratory Systems
Homework 3: Design Constraint Analysis and Component Selection Rationale
 Homework 3: Design Constraint Analysis and Component Selection Rationale Team Code Name: ATV (Autonomous Targeting Vehicle Group No. 3 Team Member Completing This Homework: Daniel Barrett E-mail Address
Homework 3: Design Constraint Analysis and Component Selection Rationale Team Code Name: ATV (Autonomous Targeting Vehicle Group No. 3 Team Member Completing This Homework: Daniel Barrett E-mail Address
TWELFTH ANNUAL INTERNATIONAL GROUND VEHICLE COMPETITION. Design Report
 TWELFTH ANNUAL INTERNATIONAL GROUND VEHICLE COMPETITION ALVIN-V Design Report Michelle Bovard, Trishan de Lanerolle, Nhon Trinh, Peter Votto, Matthew Gillette, Bozidar Marinkovic, Susmita Bhandari, Kevin
TWELFTH ANNUAL INTERNATIONAL GROUND VEHICLE COMPETITION ALVIN-V Design Report Michelle Bovard, Trishan de Lanerolle, Nhon Trinh, Peter Votto, Matthew Gillette, Bozidar Marinkovic, Susmita Bhandari, Kevin
Dual Voltage Solar Power Charge Controller Board Connection & Operation V2.xx
 Dual Voltage Solar Power Charge Controller Board Connection & Operation V2.xx Connection Instructions 1) Mount Board to a panel (Wood or Metal) using supplied spacers and screws. 2) Solar Start up 18 volts,
Dual Voltage Solar Power Charge Controller Board Connection & Operation V2.xx Connection Instructions 1) Mount Board to a panel (Wood or Metal) using supplied spacers and screws. 2) Solar Start up 18 volts,
TETRA-DS III TM Operating Manual
 TM Operating Manual Version 1.0 2011.05 Table of Contents Important Safety Instructions ----------------------------- 4 Inappropriate Operation - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
TM Operating Manual Version 1.0 2011.05 Table of Contents Important Safety Instructions ----------------------------- 4 Inappropriate Operation - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Human Powered Vehicle Challenge. Problem Formulation and Project Plan Document
 Human Powered Vehicle Challenge By Matt Gerlich, Alex Hawley, Phillip Kinsley, Heather Kutz, Kevin Montoya, Erik Nelson Team 9 Problem Formulation and Project Plan Document Submitted towards partial fulfillment
Human Powered Vehicle Challenge By Matt Gerlich, Alex Hawley, Phillip Kinsley, Heather Kutz, Kevin Montoya, Erik Nelson Team 9 Problem Formulation and Project Plan Document Submitted towards partial fulfillment
VEX Classroom Lab Kit to PLTW VEX POE Conversion Kit
 Published: 03/22/20 Picture Part Description Number 275-88 Rack Gearbox Bracket (2-pack): Combines with the VEX linear slides & Rack Gears to create a linear actuator. Quantity 276-096 Linear Slide (2-pack):
Published: 03/22/20 Picture Part Description Number 275-88 Rack Gearbox Bracket (2-pack): Combines with the VEX linear slides & Rack Gears to create a linear actuator. Quantity 276-096 Linear Slide (2-pack):
Masts, telescopic and sectional
 Masts, telescopic and sectional Communication Masts Sectional composite masts for manportable applications up to 9 metres Telescopic push-up masts up to 10 metres Telescopic aluminium, composite & carbon
Masts, telescopic and sectional Communication Masts Sectional composite masts for manportable applications up to 9 metres Telescopic push-up masts up to 10 metres Telescopic aluminium, composite & carbon
Vehicle Dynamic Simulation Using A Non-Linear Finite Element Simulation Program (LS-DYNA)
") Vehicle Dynamic Simulation Using A Non-Linear Finite Element Simulation Program (LS-DYNA) G. S. Choi and H. K. Min Kia Motors Technical Center 3-61 INTRODUCTION The reason manufacturers invest their time
Vehicle Dynamic Simulation Using A Non-Linear Finite Element Simulation Program (LS-DYNA) G. S. Choi and H. K. Min Kia Motors Technical Center 3-61 INTRODUCTION The reason manufacturers invest their time
AGENDA. Hyperloop Competition Team Printed Circuit Board Sensor Data Actuation Communication Conclusion Questions. Hyperloop. Competition.
 CONTROLLER AGENDA Questions 2 INTRODUCTION Celeste Bean Connor Buckland Ben Hartl Cameron McCarthy Connor Mulcahey 3 HYPERLOOP Cities < 700 miles apart Max speed of 760 mph 4 HYPERLOOP Depressurized steel
CONTROLLER AGENDA Questions 2 INTRODUCTION Celeste Bean Connor Buckland Ben Hartl Cameron McCarthy Connor Mulcahey 3 HYPERLOOP Cities < 700 miles apart Max speed of 760 mph 4 HYPERLOOP Depressurized steel
NAU Robosub. Project Proposal
 NAU Robosub Project Proposal Mansour Alajemi, Feras Aldawsari, Curtis Green, Daniel Heaton, Wenkai Ren, William Ritchie, Bethany Sprinkle, Daniel Tkachenko December 09, 2015 Bethany Overview Introduction
NAU Robosub Project Proposal Mansour Alajemi, Feras Aldawsari, Curtis Green, Daniel Heaton, Wenkai Ren, William Ritchie, Bethany Sprinkle, Daniel Tkachenko December 09, 2015 Bethany Overview Introduction
Black Knight. 12th Annual Intelligent Ground Vehicle Competition Oakland University, Rochester, Michigan June 12 th 14 th 2004
 Black Knight 12th Annual Intelligent Ground Vehicle Competition Oakland University, Rochester, Michigan June 12 th 14 th 2004 Faculty Statement: I certify that the work done by all students on this project
Black Knight 12th Annual Intelligent Ground Vehicle Competition Oakland University, Rochester, Michigan June 12 th 14 th 2004 Faculty Statement: I certify that the work done by all students on this project
F.I.R.S.T. Robotic Drive Base
 F.I.R.S.T. Robotic Drive Base Design Team Shane Lentini, Jose Orozco, Henry Sick, Rich Phelan Design Advisor Prof. Sinan Muftu Abstract F.I.R.S.T. is an organization dedicated to inspiring and teaching
F.I.R.S.T. Robotic Drive Base Design Team Shane Lentini, Jose Orozco, Henry Sick, Rich Phelan Design Advisor Prof. Sinan Muftu Abstract F.I.R.S.T. is an organization dedicated to inspiring and teaching
MOLLEBot. MOdular Lightweight, Load carrying Equipment Bot
 MOLLEBot MOdular Lightweight, Load carrying Equipment Bot Statement of Effort: I certify that the engineering design of the vehicle described in this report, MOLLEBot, has been significant and equivalent
MOLLEBot MOdular Lightweight, Load carrying Equipment Bot Statement of Effort: I certify that the engineering design of the vehicle described in this report, MOLLEBot, has been significant and equivalent
Slippage Detection and Traction Control System
 Slippage Detection and Traction Control System May 10, 2004 Sponsors Dr. Edwin Odom U of I Mechanical Engineering Department Advisors Dr. Jim Frenzel Dr. Richard Wall Team Members Nick Carter Kellee Korpi
Slippage Detection and Traction Control System May 10, 2004 Sponsors Dr. Edwin Odom U of I Mechanical Engineering Department Advisors Dr. Jim Frenzel Dr. Richard Wall Team Members Nick Carter Kellee Korpi
SAE Mini Baja. Final Presentation. Benjamin Bastidos, Jeramie Goodwin, Eric Lockwood Anthony McClinton, Caizhi Ming, Ruoheng Pan May 2, 2014
 SAE Mini Baja Final Presentation Benjamin Bastidos, Jeramie Goodwin, Eric Lockwood Anthony McClinton, Caizhi Ming, Ruoheng Pan May 2, 2014 Overview Project Introduction Need Statement Frame Design and
SAE Mini Baja Final Presentation Benjamin Bastidos, Jeramie Goodwin, Eric Lockwood Anthony McClinton, Caizhi Ming, Ruoheng Pan May 2, 2014 Overview Project Introduction Need Statement Frame Design and
Fire Power Forum. DISTRIBUTION A: Approved for Public Release.
 Armaments Technology Fire Power Forum Mr. Michael George Weapon Systems and Technology Small and Medium Caliber Armaments, Remote Weapons Branch US Army - ARDEC - WSEC 9-10 APR 2009 DISTRIBUTION A: Approved
Armaments Technology Fire Power Forum Mr. Michael George Weapon Systems and Technology Small and Medium Caliber Armaments, Remote Weapons Branch US Army - ARDEC - WSEC 9-10 APR 2009 DISTRIBUTION A: Approved
Problem Definition Review
 Problem Definition Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team Agenda Background Problem Statement Stakeholders Use Scenario Customer Requirements Engineering Requirements Preliminary Schedule
Problem Definition Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team Agenda Background Problem Statement Stakeholders Use Scenario Customer Requirements Engineering Requirements Preliminary Schedule
MOVE IT FOR TOMORROW. EN torsten.torwegge.de/en
 MOVE IT FOR TOMORROW EN torsten.torwegge.de/en // facts and figures autonomous remote 190er 300er* 190er 300er* Length 1,285 mm approx. 2,500 mm 1,285 mm approx. 2,500 mm Width 835 mm approx. 1,530 mm
MOVE IT FOR TOMORROW EN torsten.torwegge.de/en // facts and figures autonomous remote 190er 300er* 190er 300er* Length 1,285 mm approx. 2,500 mm 1,285 mm approx. 2,500 mm Width 835 mm approx. 1,530 mm
Robot Sensors and Actuators. Hesheng Wang Dept. of Automation
 Robot Sensors and Actuators Hesheng Wang Dept. of Automation Robot Sensors Sensors are devices for sensing and measuring geometric and physical properties of robots and the surrounding environment Position,
Robot Sensors and Actuators Hesheng Wang Dept. of Automation Robot Sensors Sensors are devices for sensing and measuring geometric and physical properties of robots and the surrounding environment Position,
Car Technologies Stanford and CMU
 Car Technologies Stanford and CMU Stanford Racing Stanford Racing s entry was dubbed Junior in honor of Leland Stanford Jr. Team led by Sebastian Thrun and Mike Montemerlo (from SAIL) VW Passat Primary
Car Technologies Stanford and CMU Stanford Racing Stanford Racing s entry was dubbed Junior in honor of Leland Stanford Jr. Team led by Sebastian Thrun and Mike Montemerlo (from SAIL) VW Passat Primary
Functional Algorithm for Automated Pedestrian Collision Avoidance System
 Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Table of Contents. Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.
 Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.") March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
RED RAVEN. RED Robotic Autonomous Vehicle Engineered at Northridge
 RED RAVEN RED Robotic Autonomous Vehicle Engineered at Northridge Team Members Keyawa, Nicholas Wang, Po-Jen Alhadlaq, Mohammed Hartman, Amiel Chen, Pei-chun Valadez, Steve Lee, Andrew Hernandez, Manuel
RED RAVEN RED Robotic Autonomous Vehicle Engineered at Northridge Team Members Keyawa, Nicholas Wang, Po-Jen Alhadlaq, Mohammed Hartman, Amiel Chen, Pei-chun Valadez, Steve Lee, Andrew Hernandez, Manuel
RED RAVEN, THE LINKED-BOGIE PROTOTYPE. Ara Mekhtarian, Joseph Horvath, C.T. Lin. Department of Mechanical Engineering,
 RED RAVEN, THE LINKED-BOGIE PROTOTYPE Ara Mekhtarian, Joseph Horvath, C.T. Lin Department of Mechanical Engineering, California State University, Northridge California, USA Abstract RedRAVEN is a pioneered
RED RAVEN, THE LINKED-BOGIE PROTOTYPE Ara Mekhtarian, Joseph Horvath, C.T. Lin Department of Mechanical Engineering, California State University, Northridge California, USA Abstract RedRAVEN is a pioneered
Linear Induction Motor (LIMO) Modular Test Bed for Various Applications
 Modular Test Bed for Various Applications") Linear Induction Motor (LIMO) Modular Test Bed for Various Applications University of Connecticut Department of Electrical and Computer Engineering Advanced Power Electronics and Electric Drives Lab (APEDL)
Linear Induction Motor (LIMO) Modular Test Bed for Various Applications University of Connecticut Department of Electrical and Computer Engineering Advanced Power Electronics and Electric Drives Lab (APEDL)
A Presentation on. Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing
 in autonomous vehicles for alerting driver during overtaking and lane changing") A Presentation on Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing Presented By: Abhishek Shriram Umachigi Department of Electrical Engineering
A Presentation on Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing Presented By: Abhishek Shriram Umachigi Department of Electrical Engineering
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS
 MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
Friday, 27 June Realizing a small UAV for medical transport in developing countries Master thesis: Ferdinand Peters. Dr.One
 Dr.One Friday, 27 June 2014 Realizing a small UAV for medical transport in developing countries Master thesis: Ferdinand Peters 1 Definition Drone (bee) From Wikipedia, the free encyclopedia Drones are
Dr.One Friday, 27 June 2014 Realizing a small UAV for medical transport in developing countries Master thesis: Ferdinand Peters 1 Definition Drone (bee) From Wikipedia, the free encyclopedia Drones are
Rover Systems Rover Systems 02/29/04
 Rover Systems Rover Systems 02/29/04 ted@roversystems.com Disclaimer: The views, opinions, and/or findings contained in this paper are those of the participating team and should not be interpreted as representing
Rover Systems Rover Systems 02/29/04 ted@roversystems.com Disclaimer: The views, opinions, and/or findings contained in this paper are those of the participating team and should not be interpreted as representing
Evaluation of the Fatigue Life of Aluminum Bogie Structures for the Urban Maglev
 Evaluation of the Fatigue Life of Aluminum Bogie Structures for the Urban Maglev 1 Nam-Jin Lee, 2 Hyung-Suk Han, 3 Sung-Wook Han, 3 Peter J. Gaede, Hyundai Rotem company, Uiwang-City, Korea 1 ; KIMM, Daejeon-City
Evaluation of the Fatigue Life of Aluminum Bogie Structures for the Urban Maglev 1 Nam-Jin Lee, 2 Hyung-Suk Han, 3 Sung-Wook Han, 3 Peter J. Gaede, Hyundai Rotem company, Uiwang-City, Korea 1 ; KIMM, Daejeon-City
ISA Intimidator. July 6-8, Coronado Springs Resort Walt Disney World, Florida
 ISA Intimidator 10 th Annual Intelligent Ground Vehicle Competition July 6-8, 2002- Coronado Springs Resort Walt Disney World, Florida Faculty Advisor Contact Roy Pruett Bluefield State College 304-327-4037
ISA Intimidator 10 th Annual Intelligent Ground Vehicle Competition July 6-8, 2002- Coronado Springs Resort Walt Disney World, Florida Faculty Advisor Contact Roy Pruett Bluefield State College 304-327-4037
Required Faculty Advisor Statement
 Team Members Justin Ames Steven Delphey Jesse Farmer* Adam Fries Peter King* Kyle Konopnicki Collin McElhaney Mitch Pinsker Margarita Smith Phillip Wang *Graduate Advisors Required Faculty Advisor Statement
Team Members Justin Ames Steven Delphey Jesse Farmer* Adam Fries Peter King* Kyle Konopnicki Collin McElhaney Mitch Pinsker Margarita Smith Phillip Wang *Graduate Advisors Required Faculty Advisor Statement
GPP PGS2 PARKING GUIDANCE SYSTEM
 GPP PGS2 PARKING GUIDANCE SYSTEM GPP PGS2 INFORMATION AND GUIDANCE PARKING SYSTEM BASIC INFORMATION Information and guidance system is designed for the monitoring and provision of information on the occupancy
GPP PGS2 PARKING GUIDANCE SYSTEM GPP PGS2 INFORMATION AND GUIDANCE PARKING SYSTEM BASIC INFORMATION Information and guidance system is designed for the monitoring and provision of information on the occupancy
URM-00 TRAINING MODULE FOR INDUSTRIAL ELECTRIC MOTORS FOR MAIN DRIVE AND CONTROL CIRCUITS EDUCATIONAL KIT TO STUDY MOTORS CONTROL AND PROTECTION
 URM-01/PP Stepper motor URM-02/CC DC motor (2-quadrant) URM-03/CA AC three-phase motor URM-04/BL Brushless motor URM-05/4Q DC motor (4-quadrant) URM-06/PS Speed and position DC motor URM-SMC Multifunzional
URM-01/PP Stepper motor URM-02/CC DC motor (2-quadrant) URM-03/CA AC three-phase motor URM-04/BL Brushless motor URM-05/4Q DC motor (4-quadrant) URM-06/PS Speed and position DC motor URM-SMC Multifunzional
Headlight Test and Rating Protocol (Version I)
") Headlight Test and Rating Protocol (Version I) February 2016 HEADLIGHT TEST AND RATING PROTOCOL (VERSION I) This document describes the Insurance Institute for Highway Safety (IIHS) headlight test and
Headlight Test and Rating Protocol (Version I) February 2016 HEADLIGHT TEST AND RATING PROTOCOL (VERSION I) This document describes the Insurance Institute for Highway Safety (IIHS) headlight test and
Product and Company Overview
 Product and Company Overview Company History Founded in 1885 2015 marked 130 years of incorporation 12 Factories 2,850 Employees $500 Million in Revenue Quality is First and Foremost Quick Delivery (1-9
Product and Company Overview Company History Founded in 1885 2015 marked 130 years of incorporation 12 Factories 2,850 Employees $500 Million in Revenue Quality is First and Foremost Quick Delivery (1-9
LOBO. Dynamic parking guidance system
 LOBO Dynamic parking guidance system The automotive traffic caused by people searching for a parking place in inner cities amounts to roughly 40 percent of the total traffic in Germany. According to a
LOBO Dynamic parking guidance system The automotive traffic caused by people searching for a parking place in inner cities amounts to roughly 40 percent of the total traffic in Germany. According to a
NUMAV. AIAA at Northeastern University
 NUMAV AIAA at Northeastern University Team Officials Andrew Buggee, President, Northeastern AIAA chapter Dr. Andrew Goldstone, Faculty Advisor John Hume, Safety Officer Rob DeHate, Team Mentor Team Roster
NUMAV AIAA at Northeastern University Team Officials Andrew Buggee, President, Northeastern AIAA chapter Dr. Andrew Goldstone, Faculty Advisor John Hume, Safety Officer Rob DeHate, Team Mentor Team Roster
Siemens ADAS. Collision avoidance as the first step towards autonomous driving
 Siemens ADAS Collision avoidance as the first step towards autonomous driving siemens.com/mobility-services Advanced Driver Assistance Systems help to avoid collisions and represent the first step towards
Siemens ADAS Collision avoidance as the first step towards autonomous driving siemens.com/mobility-services Advanced Driver Assistance Systems help to avoid collisions and represent the first step towards
Moksha. Unmanned Ground Vehicle. M S Ramaiah Institute of Technology s entry into the 2011 Intelligent Ground Vehicle Competition
 Moksha Unmanned Ground Vehicle M S Ramaiah Institute of Technology s entry into the 2011 Intelligent Ground Vehicle Competition Team Members: Pavan Kumar P N, Pramod Bhat M, Akshay Vishwas Joshi, Pavan
Moksha Unmanned Ground Vehicle M S Ramaiah Institute of Technology s entry into the 2011 Intelligent Ground Vehicle Competition Team Members: Pavan Kumar P N, Pramod Bhat M, Akshay Vishwas Joshi, Pavan
LORD TFD Steering Units FOR STEER-BY-WIRE SYSTEMS
 LORD TFD Steering Units FOR STEER-BY-WIRE SYSTEMS Steer-by-Wire Systems in Industrial and Off-Highway Equipment Electro-hydraulic and fully-electric Steer-by-Wire (SbW) systems are gaining favor over traditional
LORD TFD Steering Units FOR STEER-BY-WIRE SYSTEMS Steer-by-Wire Systems in Industrial and Off-Highway Equipment Electro-hydraulic and fully-electric Steer-by-Wire (SbW) systems are gaining favor over traditional
Understanding the benefits of using a digital valve controller. Mark Buzzell Business Manager, Metso Flow Control
 Understanding the benefits of using a digital valve controller Mark Buzzell Business Manager, Metso Flow Control Evolution of Valve Positioners Digital (Next Generation) Digital (First Generation) Analog
Understanding the benefits of using a digital valve controller Mark Buzzell Business Manager, Metso Flow Control Evolution of Valve Positioners Digital (Next Generation) Digital (First Generation) Analog
Intelligent Drive next LEVEL
 Daimler AG Dr. Eberhard Zeeb Senior Manager Function and Software Driver Assistance Systems Intelligent Drive next LEVEL on the way towards autonomous driving Pioneers of the Automobile Bertha Benz 1888
Daimler AG Dr. Eberhard Zeeb Senior Manager Function and Software Driver Assistance Systems Intelligent Drive next LEVEL on the way towards autonomous driving Pioneers of the Automobile Bertha Benz 1888
FALL SEMESTER MECE 407 INNOVATIVE ENGINEERING ANALYSIS AND DESIGN PROJECT TOPICS
 2016-2017 FALL SEMESTER MECE 407 INNOVATIVE ENGINEERING ANALYSIS AND DESIGN PROJECT TOPICS 1- Design, construction and control of a cart-inverted pendulum control system: - There will be a cart and an
2016-2017 FALL SEMESTER MECE 407 INNOVATIVE ENGINEERING ANALYSIS AND DESIGN PROJECT TOPICS 1- Design, construction and control of a cart-inverted pendulum control system: - There will be a cart and an
DELHI TECHNOLOGICAL UNIVERSITY TEAM RIPPLE Design Report
 DELHI TECHNOLOGICAL UNIVERSITY TEAM RIPPLE Design Report May 16th, 2018 Faculty Advisor Statement: I hereby certify that the development of vehicle, described in this report has been equivalent to the
DELHI TECHNOLOGICAL UNIVERSITY TEAM RIPPLE Design Report May 16th, 2018 Faculty Advisor Statement: I hereby certify that the development of vehicle, described in this report has been equivalent to the
Videosystem CAR-READER
 Monitoring, controlling and recording of vehicle access Monitoring The entries and exits to and from a company area are recorded from video cameras and displayed on a PC screen. The system allows depending
Monitoring, controlling and recording of vehicle access Monitoring The entries and exits to and from a company area are recorded from video cameras and displayed on a PC screen. The system allows depending
iwheels 3 Lawrence Technological University
 5-15-2017 iwheels 3 Lawrence Technological University Team Captain: Devson Butani dbutani@ltu.edu Faculty Advisors: CJ Chung Jonathan Ruszala Gordon Stein Team Members: Sean Bleicher Kevin Cox Nirmit Changani
5-15-2017 iwheels 3 Lawrence Technological University Team Captain: Devson Butani dbutani@ltu.edu Faculty Advisors: CJ Chung Jonathan Ruszala Gordon Stein Team Members: Sean Bleicher Kevin Cox Nirmit Changani
Table of Contents. Executive Summary...4. Introduction Integrated System...6. Mobile Platform...7. Actuation...8. Sensors...9. Behaviors...
 TaleGator Nyal Jennings 4/22/13 University of Florida Email: Magicman01@ufl.edu TAs: Ryan Chilton Josh Weaver Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz Table of Contents Abstract...3 Executive
TaleGator Nyal Jennings 4/22/13 University of Florida Email: Magicman01@ufl.edu TAs: Ryan Chilton Josh Weaver Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz Table of Contents Abstract...3 Executive
Project Proposal for Autonomous Vehicle
 Project Proposal for Autonomous Vehicle Group Members: Ramona Cone Erin Cundiff Project Advisors: Dr. Huggins Dr. Irwin Mr. Schmidt 12/12/02 Project Summary The autonomous vehicle uses an EMAC based system
Project Proposal for Autonomous Vehicle Group Members: Ramona Cone Erin Cundiff Project Advisors: Dr. Huggins Dr. Irwin Mr. Schmidt 12/12/02 Project Summary The autonomous vehicle uses an EMAC based system
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
2006 URSA Minor Design Report 14th Intelligent Ground Vehicle Competition
 14th Intelligent Ground Vehicle Competition 1. Introduction 2. Back-To-Basics Design 3. Mechanical System 4. Electrical System 5. Software System 6. Performance Summary 7. Conclusion 8. Team Members 9.
14th Intelligent Ground Vehicle Competition 1. Introduction 2. Back-To-Basics Design 3. Mechanical System 4. Electrical System 5. Software System 6. Performance Summary 7. Conclusion 8. Team Members 9.
Innovative AGV Technologies
 Innovative AGV Technologies Scalable AGV Systems Modular AGV Subassemblies NIDEC-SHIMPO has earned a solid reputation within the robotics sector as the leader in high volume, high precision, gearbox and
Innovative AGV Technologies Scalable AGV Systems Modular AGV Subassemblies NIDEC-SHIMPO has earned a solid reputation within the robotics sector as the leader in high volume, high precision, gearbox and
ABB ROBOTICS, DECEMBER 2015 IRB 910SC. SCARA Overview
 ABB ROBOTICS, DECEMBER 2015 IRB 910SC SCARA Overview IRB 910 SC Agenda 1. Differentiated value proposition 2. Overview and vision 3. Main features 4. Payload 5. Working range 6. Performance and accuracy
ABB ROBOTICS, DECEMBER 2015 IRB 910SC SCARA Overview IRB 910 SC Agenda 1. Differentiated value proposition 2. Overview and vision 3. Main features 4. Payload 5. Working range 6. Performance and accuracy