Sabertooth A Hybrid AUV/ROV offshore system. Jan Siesjö Chief Engineer
|
|
|
- Christian McLaughlin
- 6 years ago
- Views:
Transcription


1 Sabertooth A Hybrid AUV/ROV offshore system Jan Siesjö Chief Engineer jan.siesjo@saabgroup.com

2 SAAB WORLDWIDE Employees 2010 Sweden 10,372 South Africa 1,086 Australia 349 USA 194 Great Britain 117 Finland 74 Denmark 72 Norway 50 Switzerland 50 Germany 34 Other 138 Total 12,536


3 SAAB Seaeye Ltd A company within the Saab Group Fareham, United Kingdom Commercial ROV Linköping, Sweden Defence ROV & AUV

4 BUSINESS WORLDWIDE ROV-Seaeye AUV systems ROV-Def systems

5 COMPANY HISTORY It all started 100 years ago. In 1910, production of the first Swedish developed torpedo, the M12, commences in Karlskrona. In 1941, the company relocates from Karlskrona to Motala. In 1991, Sutec is acquired. In 2007, Seaeye is acquired.


6 Double Eagle Sarov Semi autonomous AUV for military applications Developed Functions Localization Mapping Object recognition (mines) Mission planning Obstacle avoidance Mine detection Sensors Motor encoder Gyroscope GPS Camera 6




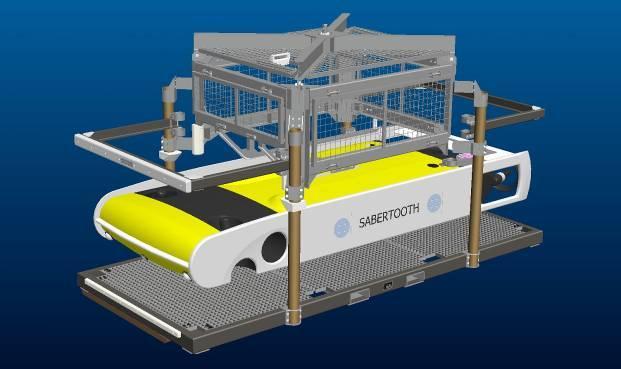
7 Seaeye Sabertooth New combination of existing technology Double Eagle SAROV SUBROV Seaeye WROV Sabertooth

8 Seaeye Sabertooth Design and benefits The Sabertooth system is designed to: Remotely do inspection and intervention without the need for a supporting ship Autonomously do surveys and transit between work sites Work as a battery powered ROV using 9 km long fiberoptic tether giving it extremely long range as well as a very low footprint Do tunnel inspections The main benefits of this are: Cost reductions, reduced ship time. Access to installations that cannot be reached with ships due to ice or weather conditions. Faster response and mobilization time. Extremely long tether excursions (+20km)




9 Seaeye Sabertooth Main elements Seaeye Sabertooth AUV Operator station TMS Garage Docking station Communication Tools and sensors


10 Seaeye Sabertooth Design Sensors: Cameras Imaging sonar Obstacle avoidance sonar Pressure sensor Hydrophone Navigation IMU/DVL Passive nodes/landmarks for local navigation (RFID, reflectors)



11 Seaeye Sabertooth Design Operator Console Similar to a conventional ROV console. Multiple computer screens Mission planning data, 3D visualization, sonar and video data.
12 Seaeye Sabertooth Docking Station Non Galvanic charging, data up and download Secure stowing place. Allows for new tools and payloads Power and communication interface Control module with the following functions: Power transformer/switching Ethernet switch Interface to electromagnetic communication antennas and network AUV Module Structure Connectors for external power and communication network. Sabertooth Inductive power coupler AUV Docking Station (AUVDS)
 Electromagnetic")
 Bandwidth")

13 Seaeye Sabertooth Communication Electromagnetic (RF) Electromagnetic transmitters and receivers Overlapping node spacing (redundancy) Bandwidth approx. 100 kb Short communication tether F/OTether (Thin & Thick) Thick Power F/O Tether
14 Seaeye Sabertooth Tools Rotating torque tool Loads on the valve is limited by a number of design features: Small weight and size Neutrally buoyant Balancing thrust from the AUV Flexible joint Future tool and sensor potential CL 7 torque tool tools for non Destructive Testing (NDT) and Hydrocarbon leak detectors Tool skid docking The same principles that are used for communication and power transfer Built in batteries Tools work independent of the AUV. Protective structure for storage
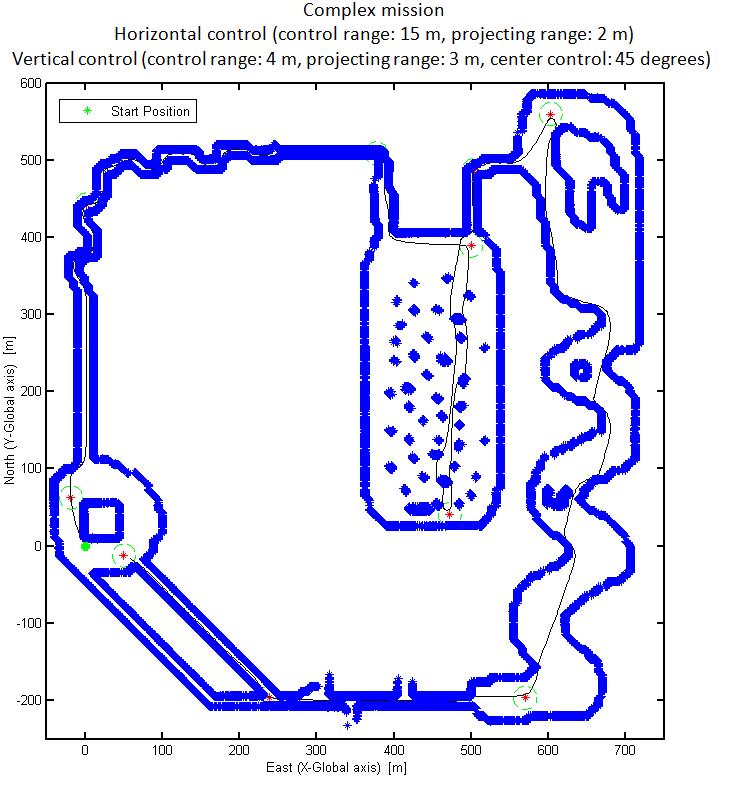
15 Sabertooth Operation Sabertooth has a behaviour based control system. Several goals simultaneously, e.g. run a track from one end of a structure to the other with a second objective of always having a standoff of 1.5 meters and a third objective avoiding obstacles. The Sabertooth can be operated in 3 different modes. Autonomous, the vehicle is instructed to perform a specific task such as a transit to a location or a pre-programmed inspection/survey. Operator assisted operation, the vehicle is given step by step instructions such as move forward 3 meters. Operations are subject to constraints such as standoff, minimum height, speed etc. Each step is then verified by video or sonar data sent back through low bandwidth communication. Manual operation, the vehicle is operated manually but with assistance from onboard IMU/doppler allowing slow (limited by bandwidth) operation. This can be used in the final approach and operation of, for example, a valve.
16 MISSION - PLANNING AND EXECUTION Missions consist of Actions: Sequential discrete events Well-known transition models For example: Transport, Search, Docking Actions consist of Behaviors: Parallel continuous control functions Activated during runtime Example: AvoidObstacle, GotoWaypoint(W), GetGPSposition Transport GetGPS-position 1 GotoWaypoint(W 1 ) AvoidObstacle FollowSearchPattern Search FollowSeaBed AvoidObstacle Transport 2 3 GetGPS-position GotoWaypoint(W 2 ) AvoidObstacle Docking 4 Docking
17 BEHAVIOR-BASED CONTROL Each behavior can voice its opinion on best course of action Behavior responses as utility functions An arbitration mechanism coordinates behaviors to maximize utility Dynamic activation level and static priority determines behavior influence. Reference values passed to low-level control system: roll, pitch, heading and speed in x, y, z. Sensor data Sensor data Sensor data Behavior Behavior Behavior Priority p1 p2 p3 Arbitration Reference value






18 Intervention The vehicle swims of on a programmed track to a work site. IMU/doppler navigation keeps the vehicle on track while the sonar based standoff behavior stops the vehicle 3 meters in front of the site. Step by step control At this point the vehicle goes into operator assisted mode. The vehicle is step by step led to apply the tool. Low bandwidth images are sent back confirming each move. Target objects Targets can be selected for each move. Perform operation Operation is completed. The vehicle returns and initiates docking.
19 OBSTACLE AVOIDANCE

20 BEHAVIOR-BASED CONTROL: EXAMPLE 1: Track following: Follow track closely for best sonar coverage and platform stability. 2: Waypoint navigation: Ensure that the overall goal of reaching the next waypoint is met 3: Obstacle avoidance: Steer the vehicle clear of obstacles. Activation rises with hazard proximity. 4: Avoid past: Influences the vehicle to favor a new path to avoid getting stuck in circular behaviors 5: Emergency stop: Influences the vehicle cruising speed to decrease with obstacle proximity. Ultimately forces the vehicle to a full stop if to close. Activation level Distance to Obstacle Hazard Risk t

21 OBSTACLE AVOIDANCE Responses are weighted together and the maximum is chosen as the response to send to control system Behavior response from Track Follow behavior and Obstacle Avoidance weighted together
22 Environmental Monitoring Environmental sensors Obstacle avoidance Pipe tracking Reactive control Radio Communication

23 Tunnel Inspection, another behaviour

24 Advanced Tunnel Inspection
25


26
SEAEYE PANTHER-XT THE VEHICLE SEAEYE PANTHER-XT
 SEAEYE PANTHER-XT The customisable Seaeye Panther-XT is designed as the benchmark for electric work ROVs and challenges heavier and more costly hydraulic vehicles, particularly where deck space is at a
SEAEYE PANTHER-XT The customisable Seaeye Panther-XT is designed as the benchmark for electric work ROVs and challenges heavier and more costly hydraulic vehicles, particularly where deck space is at a
UNDERWATER SOLUTIONS WORLDWIDE
 UNDERWATER SOLUTIONS WORLDWIDE Payload Autonomy on the Phoenix International Artemis AUV MOOS-DAWG 2015 July 22-23 Peter McKibbin IRAD/Special Projects Manager pmckibbin@phnx-international.com Brief Company
UNDERWATER SOLUTIONS WORLDWIDE Payload Autonomy on the Phoenix International Artemis AUV MOOS-DAWG 2015 July 22-23 Peter McKibbin IRAD/Special Projects Manager pmckibbin@phnx-international.com Brief Company
SEAEYE COUGAR-XT COMPACT
 SEAEYE COUGAR-XT COMPACT SEAEYE COUGAR-XT COMPACT The Seaeye Cougar-XT Compact is the shallow water compact version of the field proven and extremely powerful Cougar-XT. Proven worldwide and recognised
SEAEYE COUGAR-XT COMPACT SEAEYE COUGAR-XT COMPACT The Seaeye Cougar-XT Compact is the shallow water compact version of the field proven and extremely powerful Cougar-XT. Proven worldwide and recognised
Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination
: An Autonomous Vessel for Data Acquisition and Dissemination") Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination AUV Lab @ MIT Sea Grant Alon Yaari, Michael Sacarny, Michael DeFilippo, Husayn Karimi, Paris Perdikaris MOOS-DAWG 2015
Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination AUV Lab @ MIT Sea Grant Alon Yaari, Michael Sacarny, Michael DeFilippo, Husayn Karimi, Paris Perdikaris MOOS-DAWG 2015
DEFEATING THE MINE THREAT
 Company unclassified Export controlled Name XXXXX Issue X Saab DEFEATING THE MINE THREAT Peter B Nilsson 2 SAAB NAVAL MCM CURRENT APPROACH THE PLATFORMS THE TOOLBOX 3 WHY MINES Note: That the majority
Company unclassified Export controlled Name XXXXX Issue X Saab DEFEATING THE MINE THREAT Peter B Nilsson 2 SAAB NAVAL MCM CURRENT APPROACH THE PLATFORMS THE TOOLBOX 3 WHY MINES Note: That the majority
SEAEYE COUGAR-XT THE VEHICLE SEAEYE COUGAR-XT
 SEAEYE COUGAR-XT The Seaeye Cougar-XT is a compact, highly flexible and extremely powerful electric ROV with working depths of 2000 metres. Proven worldwide and recognised for its capability, operators
SEAEYE COUGAR-XT The Seaeye Cougar-XT is a compact, highly flexible and extremely powerful electric ROV with working depths of 2000 metres. Proven worldwide and recognised for its capability, operators
Your vehicle, our navigation. ANT - Autonomous Navigation Technology
 Your vehicle, our navigation ANT - Autonomous Navigation Technology ANT allows your vehicle to localize and navigate completely autonomously. Installation process ANT is environment based ANT uses natural
Your vehicle, our navigation ANT - Autonomous Navigation Technology ANT allows your vehicle to localize and navigate completely autonomously. Installation process ANT is environment based ANT uses natural
ISSUE Construction and ROV Professionals Q2 / A Breakthrough in Hybrid Underwater Vehicles. The ECA Mine Counter Measure System
 8. A Breakthrough in Hybrid Underwater Vehicles 25. The ECA Mine Counter Measure System 31. The SeaTrepid Story 34. The Evolution of Single Beam Sonars for ROVs 11 The magazine of choice for Subsea ISSUE
8. A Breakthrough in Hybrid Underwater Vehicles 25. The ECA Mine Counter Measure System 31. The SeaTrepid Story 34. The Evolution of Single Beam Sonars for ROVs 11 The magazine of choice for Subsea ISSUE
SURVEYOR-H. Technical Data. Max speed 120 km/h. Engine power 7.2 hp. Powerplant Modified Zenoah G29E. Fuel tank volume 3.6 l
 rev. 28.10.14 * features & specifications are subject to change without notice. Technical Data Max speed 120 km/h Engine power 7.2 hp Powerplant Modified Zenoah G29E Fuel tank volume 3.6 l Payload with
rev. 28.10.14 * features & specifications are subject to change without notice. Technical Data Max speed 120 km/h Engine power 7.2 hp Powerplant Modified Zenoah G29E Fuel tank volume 3.6 l Payload with
Underwater Remotely Operated Vehicles (ROV) Drive & Dive Motion Solutions
 Drive & Dive Motion Solutions") Underwater Remotely Operated Vehicles (ROV) Drive & Dive Motion Solutions Deep sea exploration - where motion matters Elmo s motion solutions are ideal for the ever advancing world of underwater remotely
Underwater Remotely Operated Vehicles (ROV) Drive & Dive Motion Solutions Deep sea exploration - where motion matters Elmo s motion solutions are ideal for the ever advancing world of underwater remotely
Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials. Ripley Valley Rural Fire Brigade - August 2010
 Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials Ripley Valley Rural Fire Brigade - August 2010 The Brigade offered to help evaluate the capabilities of an Unmanned Aerial Vehicle (UAV)
Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials Ripley Valley Rural Fire Brigade - August 2010 The Brigade offered to help evaluate the capabilities of an Unmanned Aerial Vehicle (UAV)
Detailed Design Review
 Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
Design and Testing of the Spartan USV Mine Warfare Module
 Design and Testing of the Spartan USV Mine Warfare Module 14 June, 2005 Dr. Robert Mons Sr. Advisory Engineer Northrop Grumman Corporation Acknowledgement This work was sponsored by The Naval Undersea
Design and Testing of the Spartan USV Mine Warfare Module 14 June, 2005 Dr. Robert Mons Sr. Advisory Engineer Northrop Grumman Corporation Acknowledgement This work was sponsored by The Naval Undersea
VR to DL for UUST. lfremer
 VR to DL for UUST 1 operational tech testbed 1980 EPAULARD 1985 NAUTILE SIRENE - AUV «autonomous landing» 1998 VICTOR 6000 SWIMMER - AUV «autonomous docking» 2001 ALIVE-AUV «autonomous intervention» 2003
VR to DL for UUST 1 operational tech testbed 1980 EPAULARD 1985 NAUTILE SIRENE - AUV «autonomous landing» 1998 VICTOR 6000 SWIMMER - AUV «autonomous docking» 2001 ALIVE-AUV «autonomous intervention» 2003
Star Tower. Why Aerostats Star Tower: Applications Summary. Description Performance Features Payload. Product CARAVAN INTERNATIONAL CORPORATION
 AEROSTATS CARAVAN INTERNATIONAL CORPORATION Star Tower Why Aerostats Star Tower: Product Description Performance Features Payload Applications Summary Why Our Aerostats Provide persistent wide-area coverage
AEROSTATS CARAVAN INTERNATIONAL CORPORATION Star Tower Why Aerostats Star Tower: Product Description Performance Features Payload Applications Summary Why Our Aerostats Provide persistent wide-area coverage
BY HOEYCOMB AEROSPACE TECHNOLOGIES. HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV
 BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
Autonomous / Unmanned Surface Vehicles And The Increased Efficiencies They Offer. James Hailstones, ASV, Ltd.
 Autonomous / Unmanned Surface Vehicles And The Increased Efficiencies They Offer James Hailstones, ASV, Ltd. Introduction Company ~70 employees worldwide. ASV established in 2010. ASV operations in USA
Autonomous / Unmanned Surface Vehicles And The Increased Efficiencies They Offer James Hailstones, ASV, Ltd. Introduction Company ~70 employees worldwide. ASV established in 2010. ASV operations in USA
Tradeoffs between Umbilical and Battery Power in ROV Performance
 Tradeoffs between Umbilical and Battery Power in ROV Performance Matthew Cook Timohty Crandle, PhD President SeaView Systems, Inc. Dexter, MI USA mcook@seaviewsystems.com Dir. of Research and Development
Tradeoffs between Umbilical and Battery Power in ROV Performance Matthew Cook Timohty Crandle, PhD President SeaView Systems, Inc. Dexter, MI USA mcook@seaviewsystems.com Dir. of Research and Development
Unmanned Surface Vessels - Opportunities and Technology
 Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Hydrographic society
 Hydrographic society We Design, Build and Operate Unmanned Marine Systems Make a disruptive, revolutionary change to working at sea: - Reduce costs - Improve operational flexibility - Reduce risk to human
Hydrographic society We Design, Build and Operate Unmanned Marine Systems Make a disruptive, revolutionary change to working at sea: - Reduce costs - Improve operational flexibility - Reduce risk to human
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Developments on Remote DP Control and Autopilot with Collision Avoidance System
 Developments on Remote DP Control and Autopilot with Collision Avoidance System and Possible Stepping Stones Towards Autonomous Ships? Exhibition 1 For more than seven years MT has worked steadfastily
Developments on Remote DP Control and Autopilot with Collision Avoidance System and Possible Stepping Stones Towards Autonomous Ships? Exhibition 1 For more than seven years MT has worked steadfastily
Problem Definition Review
 Problem Definition Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team Agenda Background Problem Statement Stakeholders Use Scenario Customer Requirements Engineering Requirements Preliminary Schedule
Problem Definition Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team Agenda Background Problem Statement Stakeholders Use Scenario Customer Requirements Engineering Requirements Preliminary Schedule
THE FALCON REDUNDANCY HIGH WIND TOLERANCE BEST USED FOR SURVEILLANCE & SECURITY DELIVERY & TRANSPORT
 THE FALCON REDUNDANCY HIGH WIND TOLERANCE The Falcon's new air frame and motor configuration is the new best in its class of light payloads with flight times of up to 50 minutes. This makes the Falcon
THE FALCON REDUNDANCY HIGH WIND TOLERANCE The Falcon's new air frame and motor configuration is the new best in its class of light payloads with flight times of up to 50 minutes. This makes the Falcon
SeaRobotics Facility. Integrated Facility for the Design and Build and Test. Location. Facility. Test Capability
 1 SeaRobotics Facility Location Located in Stuart, Florida 26 miles north of Riviera Beach ¼ mile from I-95 Facility 1400 square meters in Treasure Coast Commerce Park 400 m2, Engineering, Integration
1 SeaRobotics Facility Location Located in Stuart, Florida 26 miles north of Riviera Beach ¼ mile from I-95 Facility 1400 square meters in Treasure Coast Commerce Park 400 m2, Engineering, Integration
VLVnT Installation and Maintenance of the submarine network
 VLVnT Installation and Maintenance of submarine network The Maintenance aspect present some difficult as ir cost is very v high. For this reason it s important: Redundancy where possible Reliability prevision
VLVnT Installation and Maintenance of submarine network The Maintenance aspect present some difficult as ir cost is very v high. For this reason it s important: Redundancy where possible Reliability prevision
In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led
 was founded by current company President Alexander Zakharov, since then he has led") A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
GRIPEN FUTURE DEVELOPMENT
 ICAS 2002 CONGRESS GRIPEN FUTURE DEVELOPMENT Gert Sjunnesson Saab Aerospace, Gripen S 581 88 Linköping, Sweden Abstract Further development and enhancement of the Gripen Weapon System is a continuous process.
ICAS 2002 CONGRESS GRIPEN FUTURE DEVELOPMENT Gert Sjunnesson Saab Aerospace, Gripen S 581 88 Linköping, Sweden Abstract Further development and enhancement of the Gripen Weapon System is a continuous process.
Control of Mobile Robots
 Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition
 Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
INTRODUCTION Team Composition Electrical System
 IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
Autonomous Haulage System for Mining Rationalization
 FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Autonomous Haulage System for Mining Rationalization The extended downturn in the mining market has placed strong demands on mining companies
FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Autonomous Haulage System for Mining Rationalization The extended downturn in the mining market has placed strong demands on mining companies
KYSTDESIGN SUPPORTER Work Class ROV
 KYSTDESIGN SUPPORTER Work Class ROV Heavy duty work class ROV 150 Hp HPU 3000 m depth rated Through frame lift capacity of 3 t Top hat TMS with 500 m tether capacity Interface prepared for advanced survey
KYSTDESIGN SUPPORTER Work Class ROV Heavy duty work class ROV 150 Hp HPU 3000 m depth rated Through frame lift capacity of 3 t Top hat TMS with 500 m tether capacity Interface prepared for advanced survey
Blade Testing. In production
 Blade Testing In production Blade Testing Your partner in blade testing in production Wind turbine blades are highly sophisticated products, composed of a variety of materials and composites. During operational
Blade Testing In production Blade Testing Your partner in blade testing in production Wind turbine blades are highly sophisticated products, composed of a variety of materials and composites. During operational
Marine Robotics. Alfredo Martins. Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016
 Marine Robotics Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016 INESC TEC / ISEP Portugal alfredo.martins@inesctec.pt Multiple autonomous vehicles at sea 2 Multiple coordinated
Marine Robotics Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016 INESC TEC / ISEP Portugal alfredo.martins@inesctec.pt Multiple autonomous vehicles at sea 2 Multiple coordinated
Marine and Robotic Engineering Sales Track Record
 Marine and Robotic Engineering Sales Track Record EQUIPMENT COUNTRY OF ORIGIN DESTINATION Pioneer 50 Hp Norway Canada Pioneer 75 Hp, T.M.S. Norway Canada Scorpio 57 Hp Norway U.K. Scorpion 75 Hp U.K. Brazil
Marine and Robotic Engineering Sales Track Record EQUIPMENT COUNTRY OF ORIGIN DESTINATION Pioneer 50 Hp Norway Canada Pioneer 75 Hp, T.M.S. Norway Canada Scorpio 57 Hp Norway U.K. Scorpion 75 Hp U.K. Brazil
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS
 MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
Ejemplos de aeronaves existentes similares a las propuestas en los RFP 2007
 Ejemplos de aeronaves existentes similares a las propuestas en los RFP 2007 UAV Sergio Esteban sesteban@us.es 1 Advanced Technologies and Engineering Co (Pty) Ltd (ATE). Vulture Production: Production
Ejemplos de aeronaves existentes similares a las propuestas en los RFP 2007 UAV Sergio Esteban sesteban@us.es 1 Advanced Technologies and Engineering Co (Pty) Ltd (ATE). Vulture Production: Production
FLYEYE Unmanned Aerial System
 FLYEYE Unmanned Aerial System FLYEYE Unmanned Aerial System About Flytronic FLYTRONIC is a dynamic modern engineering company focussed on developing Unmanned Aerial Systems to provide observation and reconnaissance
FLYEYE Unmanned Aerial System FLYEYE Unmanned Aerial System About Flytronic FLYTRONIC is a dynamic modern engineering company focussed on developing Unmanned Aerial Systems to provide observation and reconnaissance
Luigi Giacalone CEO Autostrade Tech. SICVe Safety Tutor
 Luigi Giacalone CEO Autostrade Tech SICVe Safety Tutor What is it? It is a complete average speed enforcement system. It includes every feature, from road sensors to central systems, also including interfaces
Luigi Giacalone CEO Autostrade Tech SICVe Safety Tutor What is it? It is a complete average speed enforcement system. It includes every feature, from road sensors to central systems, also including interfaces
The Rise of Maritime Autonomous Systems. Richard Daltry CEng, MRINA Technical Director, ASV
 The Rise of Maritime Autonomous Systems Richard Daltry CEng, MRINA Technical Director, ASV The Rise of Maritime Autonomous Systems (MAS) Contents Overview of ASV The development of Maritime Autonomous
The Rise of Maritime Autonomous Systems Richard Daltry CEng, MRINA Technical Director, ASV The Rise of Maritime Autonomous Systems (MAS) Contents Overview of ASV The development of Maritime Autonomous
Robot mobili e tecnologie marine del centro ISME. Alessandro Ridolfi Dipartimento di Ingegneria Industriale Università di Firenze nodo ISME
 Robot mobili e tecnologie marine del centro ISME Alessandro Ridolfi Dipartimento di Ingegneria Industriale Università di Firenze nodo ISME NATIONAL INTER-UNIVERSITY CENTER TO SUPPORT RESEARCH ACTIVITIES
Robot mobili e tecnologie marine del centro ISME Alessandro Ridolfi Dipartimento di Ingegneria Industriale Università di Firenze nodo ISME NATIONAL INTER-UNIVERSITY CENTER TO SUPPORT RESEARCH ACTIVITIES
Optical Products in Automotive Active Safety
 Optical Products in Automotive Active Safety Per Knutsson, Autoliv Electronics AB 2014-11-12 Driven for Life Outline Introduction Active Safety Sensors in Active Safety Current Vision Systems Future Vision
Optical Products in Automotive Active Safety Per Knutsson, Autoliv Electronics AB 2014-11-12 Driven for Life Outline Introduction Active Safety Sensors in Active Safety Current Vision Systems Future Vision
To put integrity before opportunity To be passionate and persistent To encourage individuals to rise to the occasion
 SignalQuest, based in New Hampshire, USA, designs and manufactures electronic sensors that measure tilt angle, acceleration, shock, vibration and movement as well as application specific inertial measurement
SignalQuest, based in New Hampshire, USA, designs and manufactures electronic sensors that measure tilt angle, acceleration, shock, vibration and movement as well as application specific inertial measurement
Innovating the future of disaster relief
 Innovating the future of disaster relief American Helicopter Society International 33rd Annual Student Design Competition Graduate Student Team Submission VEHICLE OVERVIEW FOUR VIEW DRAWING INTERNAL COMPONENTS
Innovating the future of disaster relief American Helicopter Society International 33rd Annual Student Design Competition Graduate Student Team Submission VEHICLE OVERVIEW FOUR VIEW DRAWING INTERNAL COMPONENTS
1 of 5 4/19/11 2:15 PM
 Top Page > About JAMSTEC > Research Vessels, Facilities and Equipment > Research Vessels and Vehicles > URASHIMA Research, Development and Promotion Research Vessels, Facilities and Equipment Research
Top Page > About JAMSTEC > Research Vessels, Facilities and Equipment > Research Vessels and Vehicles > URASHIMA Research, Development and Promotion Research Vessels, Facilities and Equipment Research
4.5 HOURS ENDURANCE 21 KG MAX. TAKE-OFF WEIGHT IP-56 WATER/DUST RESISTANT FULLY AUTOMATIC 5 KG PAYLOAD IMC-SHIELDED +50 KM RANGE WITH HD VIDEO
 HEF32 UAV System 4.5 HOURS ENDURANCE 21 KG MAX. TAKE-OFF WEIGHT IP-56 WATER/DUST RESISTANT FULLY AUTOMATIC 5 KG PAYLOAD IMC-SHIELDED +50 KM RANGE WITH HD VIDEO CERTIFIED OPERATIONS MANUAL PART 145 MAINTENANCE
HEF32 UAV System 4.5 HOURS ENDURANCE 21 KG MAX. TAKE-OFF WEIGHT IP-56 WATER/DUST RESISTANT FULLY AUTOMATIC 5 KG PAYLOAD IMC-SHIELDED +50 KM RANGE WITH HD VIDEO CERTIFIED OPERATIONS MANUAL PART 145 MAINTENANCE
23083 Hwy. 190E P.O. Box 898 Robert, LA USA Phone: (985) Expanded Description of Rope/Riser Crawler
 Expanded Description of Rope/Riser Crawler") 23083 Hwy. 190E P.O. Box 898 Robert, LA 70455 USA Phone: (985)350-6299 e-mail: info@seatrepid.com Expanded Description of Rope/Riser Crawler ABSTRACT A semi-autonomous [tetherless] or tele-operated [tethered]
23083 Hwy. 190E P.O. Box 898 Robert, LA 70455 USA Phone: (985)350-6299 e-mail: info@seatrepid.com Expanded Description of Rope/Riser Crawler ABSTRACT A semi-autonomous [tetherless] or tele-operated [tethered]
Items to specify: 4. Motor Speed Control. Head Unit. Radar. Steering Wheel Angle. ego vehicle speed control
 Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
Design and Simulation of New Versions of Tube Launched UAV
 21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 Design and Simulation of New Versions of Tube Launched UAV Y. Zhou and
21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 Design and Simulation of New Versions of Tube Launched UAV Y. Zhou and
Palos Verdes High School 1
 Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
DEVELOPMENT OF NEW MANIPULATORS FOR PWR AND VVER VESSEL INSPECTION. Authors: Mats Wendel and Torbjörn Sjö, DEKRA Industrial, Sweden
 DEVELOPMENT OF NEW MANIPULATORS FOR PWR AND VVER VESSEL INSPECTION Authors: Mats Wendel and Torbjörn Sjö, DEKRA Industrial, Sweden ABSTRACT TIME, has been the key word for the inspection of Ringhals PWR
DEVELOPMENT OF NEW MANIPULATORS FOR PWR AND VVER VESSEL INSPECTION Authors: Mats Wendel and Torbjörn Sjö, DEKRA Industrial, Sweden ABSTRACT TIME, has been the key word for the inspection of Ringhals PWR
Jay Gundlach AIAA EDUCATION SERIES. Manassas, Virginia. Joseph A. Schetz, Editor-in-Chief. Blacksburg, Virginia. Aurora Flight Sciences
 Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Mine Warfare Trends. 10 May 2011
 Mine Warfare Trends 10 May 2011 SUMMARY OF MINING EVENTS (1980 PRESENT) 50-60 VESSELS SUNK OR DAMAGED MAJORITY IN SRI LANKA MANY ARMED CONTACT MINES ADRIFT PERSIAN GULF > 20 LIVES LOST AT-SEA & ASHORE
Mine Warfare Trends 10 May 2011 SUMMARY OF MINING EVENTS (1980 PRESENT) 50-60 VESSELS SUNK OR DAMAGED MAJORITY IN SRI LANKA MANY ARMED CONTACT MINES ADRIFT PERSIAN GULF > 20 LIVES LOST AT-SEA & ASHORE
Critical Design Report Presentation. Triton. Team 11 February 28, Department of Electrical and Computer Engineering
 Critical Design Report Presentation Triton Team 11 February 28, 2017 Introduction No economical solution for extended underwater monitoring Ecologists from UMass Amherst interested in studying spawning
Critical Design Report Presentation Triton Team 11 February 28, 2017 Introduction No economical solution for extended underwater monitoring Ecologists from UMass Amherst interested in studying spawning
A complete hybrid VTOL autopilot solution. Start anywhere, fly everywhere.
 Key Features A complete hybrid VTOL autopilot solution. Start anywhere, fly everywhere. Supported Vehicle Types s Multirotors Fixed-wings Bi-, tri- and quadcopter tailsitters, quadplanes and tiltrotors.
Key Features A complete hybrid VTOL autopilot solution. Start anywhere, fly everywhere. Supported Vehicle Types s Multirotors Fixed-wings Bi-, tri- and quadcopter tailsitters, quadplanes and tiltrotors.
R&D Activities for Underwater Vehicles and Acoustic Communication
 POGO 12 KORDI Perspective R&D Activities for Underwater Vehicles and Acoustic Communication 25 January, 211 Pan-Mook Lee Presentation Outline Vehicles 1. ROV & Depressor [Hemire/Henuvy, 27] 2. AUV [ISIMI1,
POGO 12 KORDI Perspective R&D Activities for Underwater Vehicles and Acoustic Communication 25 January, 211 Pan-Mook Lee Presentation Outline Vehicles 1. ROV & Depressor [Hemire/Henuvy, 27] 2. AUV [ISIMI1,
Adaptive Cruise Control System Overview
 5th Meeting of the U.S. Software System Safety Working Group April 12th-14th 2005 @ Anaheim, California USA 1 Introduction Adaptive Cruise System Overview Adaptive Cruise () is an automotive feature that
5th Meeting of the U.S. Software System Safety Working Group April 12th-14th 2005 @ Anaheim, California USA 1 Introduction Adaptive Cruise System Overview Adaptive Cruise () is an automotive feature that
Hybrid Nanopositioning Systems with Piezo Actuators
 Hybrid Nanopositioning Systems with Piezo Actuators Long Travel Ranges, Heavy Loads, and Exact Positioning Physik Instrumente (PI) GmbH & Co. KG, Auf der Roemerstrasse 1, 76228 Karlsruhe, Germany Page
Hybrid Nanopositioning Systems with Piezo Actuators Long Travel Ranges, Heavy Loads, and Exact Positioning Physik Instrumente (PI) GmbH & Co. KG, Auf der Roemerstrasse 1, 76228 Karlsruhe, Germany Page
18th ICTCT Workshop, Helsinki, October Technical feasibility of safety related driving assistance systems
 18th ICTCT Workshop, Helsinki, 27-28 October 2005 Technical feasibility of safety related driving assistance systems Meng Lu Radboud University Nijmegen, The Netherlands, m.lu@fm.ru.nl Kees Wevers NAVTEQ,
18th ICTCT Workshop, Helsinki, 27-28 October 2005 Technical feasibility of safety related driving assistance systems Meng Lu Radboud University Nijmegen, The Netherlands, m.lu@fm.ru.nl Kees Wevers NAVTEQ,
Development of a Low Cost DIY UAV Mapping Platform
 Development of a Low Cost DIY UAV Mapping Platform James Parkes Tritan Survey CC, Engineering and Hydrographic Surveyors, Cape Town, South Africa +27 21 797 2081 - jamesp@tritan.co.za Abstract In the past
Development of a Low Cost DIY UAV Mapping Platform James Parkes Tritan Survey CC, Engineering and Hydrographic Surveyors, Cape Town, South Africa +27 21 797 2081 - jamesp@tritan.co.za Abstract In the past
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
Traffic Awareness and Vehicle Collision Warning Systems for Surface Mobile Equipment April 2009
 Traffic Awareness and Vehicle Collision Warning Systems for Surface Mobile Equipment April 2009 Steven Niven 0 Anglo Coal Regional Engineering Services Presenter Profile Steven Niven Control and Instrumentation
Traffic Awareness and Vehicle Collision Warning Systems for Surface Mobile Equipment April 2009 Steven Niven 0 Anglo Coal Regional Engineering Services Presenter Profile Steven Niven Control and Instrumentation
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
SurfROVer: An ROV for Littoral Zone Survey Work
 XXX-X-XXXX-XXXX-X/XX/$XX.00 20XX IEEE SurfROVer: An ROV for Littoral Zone Survey Work Timothy Crandle PhD tcrandle@seaviewsystems.com Matthew Cook Geoffrey Cook Edward Celkis Abstract Powered umbilical
XXX-X-XXXX-XXXX-X/XX/$XX.00 20XX IEEE SurfROVer: An ROV for Littoral Zone Survey Work Timothy Crandle PhD tcrandle@seaviewsystems.com Matthew Cook Geoffrey Cook Edward Celkis Abstract Powered umbilical
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
UAV KF-1 helicopter. CopterCam UAV KF-1 helicopter specification
 UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
SIP-adus Field Operational Test
 Regional activities and FOTs SIP-adus Field Operational Test ー Mobility bringing everyone a smile ー Masato MINAKATA (TOYOTA MOTOR CORPORATION) SIP-adus International Cooperative WG 14 Nov. 2017 Goal of
Regional activities and FOTs SIP-adus Field Operational Test ー Mobility bringing everyone a smile ー Masato MINAKATA (TOYOTA MOTOR CORPORATION) SIP-adus International Cooperative WG 14 Nov. 2017 Goal of
Length Height Rotor Diameter Tail Rotor Diameter..12. Tail Boom Length Width
 2.1 Air Vehicle 2.1.1 Vehicle General Description The PA-01 Vapor S-UAV is a rotary wing small unmanned aerial vehicle. The AV is powered by an outrunner 8.5hp class brushless electric motor. The airframe
2.1 Air Vehicle 2.1.1 Vehicle General Description The PA-01 Vapor S-UAV is a rotary wing small unmanned aerial vehicle. The AV is powered by an outrunner 8.5hp class brushless electric motor. The airframe
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
Our Approach to Automated Driving System Safety. February 2019
 Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
Bild : Bernhard Mühr German Aerospace Center Flight Operations
 German Aerospace Center Flight Operations Bild : Bernhard Mühr www.wolkenatlas.de Introduction DLR is Germany s aerospace research center and space agency with about 4700 employees in 31 research institutes
German Aerospace Center Flight Operations Bild : Bernhard Mühr www.wolkenatlas.de Introduction DLR is Germany s aerospace research center and space agency with about 4700 employees in 31 research institutes
SPROVER. Surf Profiling Remotely Operated Vehicle
 SPROVER Surf Profiling Remotely Operated Vehicle TEAM MEMBERS BRIAN SMETTS JEFF BIRMINGHAM NICOLAS DUGELAY NIRAJ PATEL HISTORY Original ROV was designed to obtain a beach profile Never passed original
SPROVER Surf Profiling Remotely Operated Vehicle TEAM MEMBERS BRIAN SMETTS JEFF BIRMINGHAM NICOLAS DUGELAY NIRAJ PATEL HISTORY Original ROV was designed to obtain a beach profile Never passed original
Project Proposal for Autonomous Vehicle
 Project Proposal for Autonomous Vehicle Group Members: Ramona Cone Erin Cundiff Project Advisors: Dr. Huggins Dr. Irwin Mr. Schmidt 12/12/02 Project Summary The autonomous vehicle uses an EMAC based system
Project Proposal for Autonomous Vehicle Group Members: Ramona Cone Erin Cundiff Project Advisors: Dr. Huggins Dr. Irwin Mr. Schmidt 12/12/02 Project Summary The autonomous vehicle uses an EMAC based system
DEVELOPMENT OF INFRASTRUCTURE-BASED AUTONOMOUS DRIVING SUPPORT SYSTEM USING DYNAMIC MAPS
 24th Annual ITS World Congress 2017 TS72 : Traffic Management Case Studies 01 November 2017 DEVELOPMENT OF INFRASTRUCTURE-BASED AUTONOMOUS DRIVING SUPPORT SYSTEM USING DYNAMIC MAPS Yoshiaki Tsuda +), Keisuke
24th Annual ITS World Congress 2017 TS72 : Traffic Management Case Studies 01 November 2017 DEVELOPMENT OF INFRASTRUCTURE-BASED AUTONOMOUS DRIVING SUPPORT SYSTEM USING DYNAMIC MAPS Yoshiaki Tsuda +), Keisuke
DeepOcean Superior ROV
 DeepOcean Superior ROV combining high speed acoustic surveys and visual inspection Subops Haugesund 5 th August 2015 - Making a difference Company snapshot Vessels ROVs Trenchers & Ploughs Owned: 7 Long
DeepOcean Superior ROV combining high speed acoustic surveys and visual inspection Subops Haugesund 5 th August 2015 - Making a difference Company snapshot Vessels ROVs Trenchers & Ploughs Owned: 7 Long
Status & evolutions of Telemetry Services for Profiling Floats. Brice Robert Patrick Bradley (CLS America)
") Status & evolutions of Telemetry Services for Profiling Floats Brice Robert brobert@cls.fr Patrick Bradley (CLS America) pbradley@clsamerica.fr COMPANY PROFILE CLS is a subsidiary of the French Space Agency
Status & evolutions of Telemetry Services for Profiling Floats Brice Robert brobert@cls.fr Patrick Bradley (CLS America) pbradley@clsamerica.fr COMPANY PROFILE CLS is a subsidiary of the French Space Agency
MAV and UAV Research at Rochester Institute of Technology. Rochester Institute of Technology
 MAV and UAV Research at Andrew Streett 5 th year BS/MS Student 2005-2006 MAV Team Lead Jason Grow BS/MS Graduate of RIT 2003-2004 MAV Team Lead Boeing Phantom Works, HB 714-372-9026 jason.a.grow@boeing.com
MAV and UAV Research at Andrew Streett 5 th year BS/MS Student 2005-2006 MAV Team Lead Jason Grow BS/MS Graduate of RIT 2003-2004 MAV Team Lead Boeing Phantom Works, HB 714-372-9026 jason.a.grow@boeing.com
HEF 32 UNMANNED HELICOPTER SYSTEM
 HEF 32 UNMANNED HELICOPTER SYSTEM > 4 HOURS ENDURANCE 50 KM LINE OF SIGHT RANGE IP-67 WATER/DUST RESISTANT 5 KG PAYLOAD 21.5 KG MAX. TAKE-OFF WEIGHT EMI-SHIELDED ITAR FREE FULLY AUTOMATIC OPERATION ENCRYPTED
HEF 32 UNMANNED HELICOPTER SYSTEM > 4 HOURS ENDURANCE 50 KM LINE OF SIGHT RANGE IP-67 WATER/DUST RESISTANT 5 KG PAYLOAD 21.5 KG MAX. TAKE-OFF WEIGHT EMI-SHIELDED ITAR FREE FULLY AUTOMATIC OPERATION ENCRYPTED
Daimler Trucks. Supporting the driver in conserving energy and reducing emissions - Daimler Trucks ecodriver assistance experience - Roland Trauter
 Roland Trauter Supporting the driver in conserving energy and reducing emissions - Daimler Trucks ecodriver assistance experience - EGVIA Workshop European funded project results: Reduction of CO2 emissions
Roland Trauter Supporting the driver in conserving energy and reducing emissions - Daimler Trucks ecodriver assistance experience - EGVIA Workshop European funded project results: Reduction of CO2 emissions
CS 188: Artificial Intelligence
 CS 188: Artificial Intelligence Advanced Applications: Robotics Pieter Abbeel UC Berkeley A few slides from Sebastian Thrun, Dan Klein 2 So Far Mostly Foundational Methods 3 1 Advanced Applications 4 Autonomous
CS 188: Artificial Intelligence Advanced Applications: Robotics Pieter Abbeel UC Berkeley A few slides from Sebastian Thrun, Dan Klein 2 So Far Mostly Foundational Methods 3 1 Advanced Applications 4 Autonomous
Convenience electronics
 Convenience electronics Operating conditions Various conditions have to be met to enable roof movement to be carried out. This applies to opening and closing the convertible roof. One vital element of
Convenience electronics Operating conditions Various conditions have to be met to enable roof movement to be carried out. This applies to opening and closing the convertible roof. One vital element of
Materials First use of high performance ceramics for full ocean depth floatation. HROV will be the first project to exploit high strength ceramic tech
 11,000 Meter HROV Development Program and its Relation to Oceanographic and Commercial Undersea Use February 2006 Andy Bowen, Dr. Dana Yoerger, (Woods Hole Oceanographic Institution), Dr. Louis Whitcomb
11,000 Meter HROV Development Program and its Relation to Oceanographic and Commercial Undersea Use February 2006 Andy Bowen, Dr. Dana Yoerger, (Woods Hole Oceanographic Institution), Dr. Louis Whitcomb
Holistic Range Prediction for Electric Vehicles
 Holistic Range Prediction for Electric Vehicles Stefan Köhler, FZI "apply & innovate 2014" 24.09.2014 S. Köhler, 29.09.2014 Outline Overview: Green Navigation Influences on Electric Range Simulation Toolchain
Holistic Range Prediction for Electric Vehicles Stefan Köhler, FZI "apply & innovate 2014" 24.09.2014 S. Köhler, 29.09.2014 Outline Overview: Green Navigation Influences on Electric Range Simulation Toolchain
MINE CLEARANCE, REMOTE CONTROL AND AREA DENIAL SYSTEMS SPECIAL PROJECTS
 MINE CLEARANCE, REMOTE CONTROL AND AREA DENIAL SYSTEMS SPECIAL PROJECTS Based firmly on Pearson Engineering s experience in defence and security, Special Projects offer customer oriented solutions across
MINE CLEARANCE, REMOTE CONTROL AND AREA DENIAL SYSTEMS SPECIAL PROJECTS Based firmly on Pearson Engineering s experience in defence and security, Special Projects offer customer oriented solutions across
Investigative Technologies and Techniques
 Investigative Technologies and Techniques Using Drones In Accident Investigation (Aerial Photography) Drone used in accident investigation Technical specifications and performance Flat 8 motor configuration
Investigative Technologies and Techniques Using Drones In Accident Investigation (Aerial Photography) Drone used in accident investigation Technical specifications and performance Flat 8 motor configuration
Red Team. DARPA Grand Challenge Technical Paper. Revision: 6.1 Submitted for Public Release. April 8, 2004
 Red Team DARPA Grand Challenge Technical Paper Revision: 6.1 Submitted for Public Release April 8, 2004 Team Leader: William Red L. Whittaker Email address: red@ri.cmu.edu Mailing address: Carnegie Mellon
Red Team DARPA Grand Challenge Technical Paper Revision: 6.1 Submitted for Public Release April 8, 2004 Team Leader: William Red L. Whittaker Email address: red@ri.cmu.edu Mailing address: Carnegie Mellon
Design of SPARUS II AUV
 Design of SPARUS II AUV Underwater Robotics Research Centre (CIRS) Computer Vision and Robotics Institute Universitat de Girona, 17003, Girona, Spain. web: http://cirs.udg.edu Contact person: Marc Carreras
Design of SPARUS II AUV Underwater Robotics Research Centre (CIRS) Computer Vision and Robotics Institute Universitat de Girona, 17003, Girona, Spain. web: http://cirs.udg.edu Contact person: Marc Carreras
Functional Algorithm for Automated Pedestrian Collision Avoidance System
 Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Initial Project and Group Identification Document. Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle)
") Initial Project and Group Identification Document Project Idea: Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle) Team Members: Robertson Augustine (Computer Engineer)
Initial Project and Group Identification Document Project Idea: Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle) Team Members: Robertson Augustine (Computer Engineer)
Capital Markets Day 2007 Kongsberg Maritime 25 September 20O7
 Capital Markets Day 27 Kongsberg Maritime 25 September 2O7 WORLD CLASS through people, technology and dedication 1 Kongsberg Maritime Offshore & Merchant Marine Offshore & Merchant Marine Introduction
Capital Markets Day 27 Kongsberg Maritime 25 September 2O7 WORLD CLASS through people, technology and dedication 1 Kongsberg Maritime Offshore & Merchant Marine Offshore & Merchant Marine Introduction
FHA-C Mini Servo Actuators with Multi-turn Absolute Encoder
 FHA-C Mini Servo Actuators with Multi-turn Absolute Encoder Robotics and Automation Machine tools Semiconductor technology Medical Packaging machines Special environments Our inspiration Your business
FHA-C Mini Servo Actuators with Multi-turn Absolute Encoder Robotics and Automation Machine tools Semiconductor technology Medical Packaging machines Special environments Our inspiration Your business
Project Narrative Description
 0 Project Narrative Description Charge Spot is intended to demonstrate the feasibility of an autonomous electric vehicle charging system for residential use. The goal of Charge Spot is to have no user
0 Project Narrative Description Charge Spot is intended to demonstrate the feasibility of an autonomous electric vehicle charging system for residential use. The goal of Charge Spot is to have no user
GCAT. University of Michigan-Dearborn
 GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
Chapter 8. Example Point Design - Suppression of Enemy Air Defenses
 Chapter 8 Example Point Design - Suppression of Enemy Air Defenses In order to quantify the sensitivity of UAVs to potential technological advances and to define promising UAVs as precisely as possible,
Chapter 8 Example Point Design - Suppression of Enemy Air Defenses In order to quantify the sensitivity of UAVs to potential technological advances and to define promising UAVs as precisely as possible,
Permanent Multipath Clamp-On Transit Time Flow Meter
 Permanent Multipath Clamp-On Transit Time Flow Meter By: Dr. J. Skripalle HydroVision GmbH, Germany Introduction For many years now, ultrasonic flow measurements with wetted sensors have been a well established
Permanent Multipath Clamp-On Transit Time Flow Meter By: Dr. J. Skripalle HydroVision GmbH, Germany Introduction For many years now, ultrasonic flow measurements with wetted sensors have been a well established
FORD MONDEO Quick Reference Guide
 FORD MONDEO Quick Reference Guide About This Quick Reference Guide We have created this guide to help you get to know certain features of your vehicle. It only contains basic instructions to get you started
FORD MONDEO Quick Reference Guide About This Quick Reference Guide We have created this guide to help you get to know certain features of your vehicle. It only contains basic instructions to get you started
Hydro-Piezoelectricity: A Renewable Energy Source For Autonomous Underwater Vehicles
 Hydro-Piezoelectricity: A Renewable Energy Source For Autonomous Underwater Vehicles Dr. George W. Taylor Ocean Power Technologies, Inc. 1590 Reed Road Pennington, N.J. 08534 phone: 609-730-0400 fax: 609-730-0404
Hydro-Piezoelectricity: A Renewable Energy Source For Autonomous Underwater Vehicles Dr. George W. Taylor Ocean Power Technologies, Inc. 1590 Reed Road Pennington, N.J. 08534 phone: 609-730-0400 fax: 609-730-0404
AT-10 Electric/HF Hybrid VTOL UAS
 AT-10 Electric/HF Hybrid VTOL UAS Acuity Technologies Robert Clark bob@acuitytx.com Summary The AT-10 is a tactical size hybrid propulsion VTOL UAS with a nose camera mount and a large payload bay. Propulsion
AT-10 Electric/HF Hybrid VTOL UAS Acuity Technologies Robert Clark bob@acuitytx.com Summary The AT-10 is a tactical size hybrid propulsion VTOL UAS with a nose camera mount and a large payload bay. Propulsion
ORCA XI: An Autonomous Underwater Vehicle
 ORCA XI:AnAutonomousUnderwaterVehicle YazanAldehayyat,RichardDahan,ImanFayyad, JeanMartin,MatthewPerkins,RachelSharples MassachusettsInstituteofTechnology ProjectORCA 77MassachusettsAvenue,Room4 405 Cambridge,MA02139
ORCA XI:AnAutonomousUnderwaterVehicle YazanAldehayyat,RichardDahan,ImanFayyad, JeanMartin,MatthewPerkins,RachelSharples MassachusettsInstituteofTechnology ProjectORCA 77MassachusettsAvenue,Room4 405 Cambridge,MA02139