Collecting Vehicle Trajectory Information by Smartphones when GPS Signal is Lost
|
|
|
- Rafe McCarthy
- 6 years ago
- Views:
Transcription

1 Collecting Vehicle Trajectory Information by Smartphones when GPS Signal is Lost Mecit Cetin, PhD Department of Civil and Environmental Engineering Tamer Nadeem, PhD Computer Science Ilyas Ustun, Abdulla Alasaadi, Olcay Sahin, Matthew Orensky
2 Introduction Smartphones market share As of Dec 2013, 65% have it Smartphones equipped with various sensors GPS, accelerometer, gyroscope, compass, proximity sensor, and ambient light sensor, etc. Sensor data used in: Activity classification (sitting, walking, running, biking) Travel mode identification (car, bus, light rail, riding a bike, walking) 2
3 Objective Without using GPS detect whether the vehicle is in motion or stopped estimate speed Why avoid GPS? Low accuracy of GPS in urban areas with tall buildings, tunnels, covered areas, Low precision of GPS localization, High-power consumption when the GPS is in use 3
4 Project Description Funded by TranLIVE UTC (University Transportation Center) Develop an app to estimate fuel consumption and CO 2 emissions for a multi-modal trip Provide feedback to the driver 4
5 Potential Applications Traffic monitoring Signal timing optimization Fuel consumption and emission predictions Estimating vehicle trajectories while in a tunnel 5
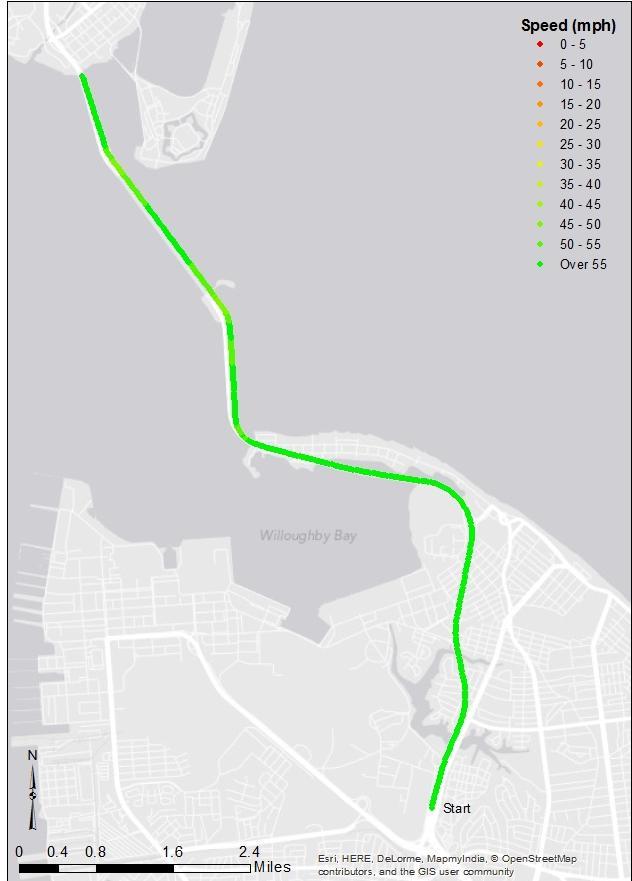
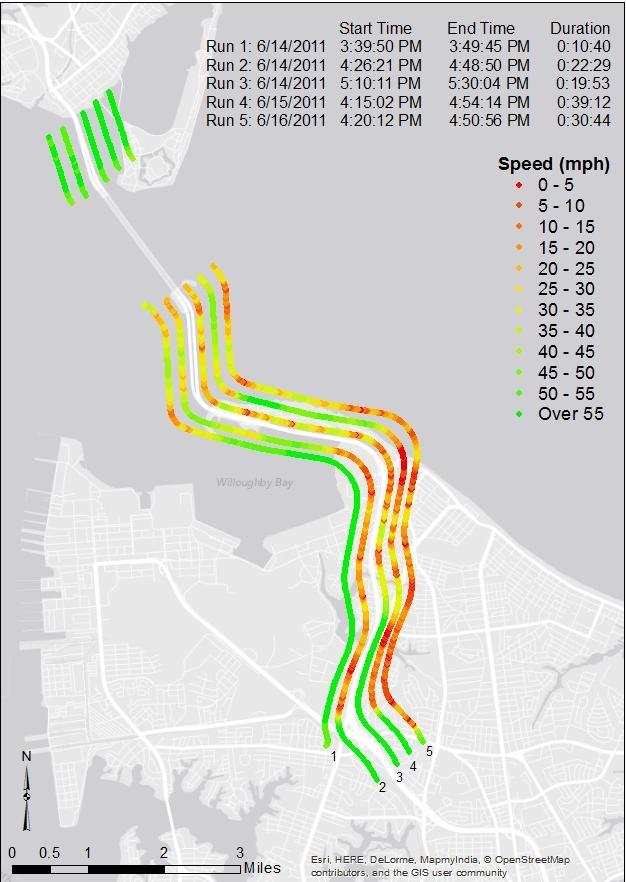
6 Data Collection within Tunnels 6
7 Data Collection System 7
8 Data Collection Android App Acceleration, Gyroscope, Magnetometer sensor data GPS latitude, longitude, and speed OBD speed (if available) GPS and OBD speeds are used for model development and testing 8

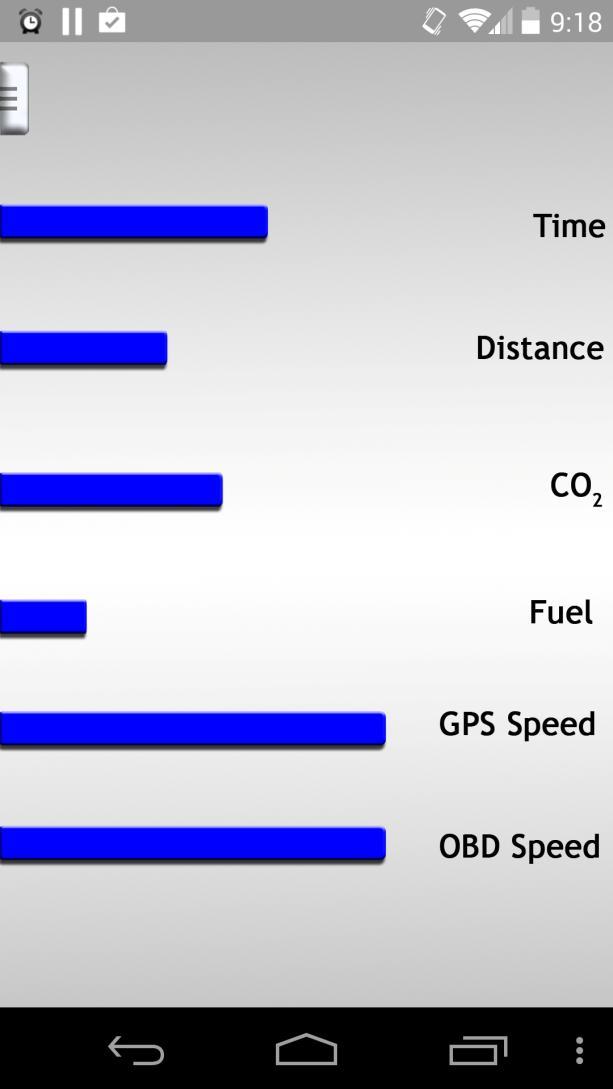

9 GoGreen App (in Development) 9

10 Database View 10

11 Collected Data 11
12 Three-axis Accelerometer Data 12

13 Raw Acceleration Data in Y and Z 13

14 Std Deviation of Y and Z 14
15 Range Range Calculated over 1-sec Data Orientation invariant data 2.5 Driver 16_ _Trip 1 dodge caliber, LGE Nexus 5 Motion percentage, Overlap: 0.5, Window: 1 secs, Motion Standstill Total Acceleration 15
16 Hidden Markov Model The X s are hidden states (vehicle being stationary or in motion). The Y s are visible observations (acceleration data). 16
17 Speed (mph) Sample Data Toyota Prius Driver 2_ _Trip 1, GPS speed used, Overlap: 0.5, Window: 1 secs, toyota prius, samsung GT-N7000 Motion percentage 0.74, HMM trained at and the emission vector created at: Range: 0.5 stop point move point Threshold X squared std dev mean range max gps speed threshold pred HMM pred :00 02:04 04:08 06:12 08:16 10:20 12:24 14:28 16:32 18:36 20:41 22:45 index 17
18 Speed (mph) Sample Data - Dodge Caliber Driver 16_ _Trip 1, GPS speed used, Overlap: 0.5, Window: 1 secs, dodge caliber, LGE Nexus 5 Motion percentage 0.59, HMM trained at and the emission vector created at: Range: 0.6 stop point move point Threshold X squared std dev mean range max gps speed threshold pred HMM pred :00 01:05 02:11 03:17 04:23 05:29 06:34 07:40 08:46 09:52 10:58 12:03 index 18
19 Likely states Speed (mph) 60 Detecting Motion and Stops Acura RL Speed Likely states Observation Actual stop point Actual move point :00 02:15 04:31 06:47 09:02 11:18 13:34 15:49 18:05 20:21 22:37 24:52 Time (mm:ss) Device: Samsung Note I Vehicle: Acura RL
20 Likely states Speed (mph) Detecting Motion and Stops Toyota Prius Speed Likely states Observation Actual stop point Actual move point :00 02:04 04:08 06:12 08:17 10:21 12:25 14:30 16:34 18:38 20:43 22:47 Time (mm:ss) Device: Samsung Note I Vehicle: Toyota Prius
21 Likely states Speed (mph) Detecting Motion and Stops Dodge Caliber 80 Speed Likely states Observation Actual stop point Actual move point :00 01:06 02:12 03:18 04:24 05:30 06:36 07:42 08:48 09:54 11:00 12:06 Time (mm:ss) Device: LGE Nexus 5 Vehicle: Dodge Caliber
22 Mean Acceleration (m/s 2 ) Speed Estimation Accelerometer data Noisy and biased Bias varies from phone to phone Mean Acceleration Readings ( over 11s) z -z +y -y +x -x Orientation (axis facing up / opposing gravity) 22
23 Speed (mph) Speed Estimation Before Calibration File: ALLdata Resample freq: 10 Hz Est speed OBD speed GPS speed :00 02:26 04:53 07:19 09:46 12:13 14:39 17:06 19:32 21:59 24:26 26:52 Time (Min) 23
24 Speed (mph) Speed Estimation After Calibration File: ALLdata Resample freq: 10 Hz Est speed OBD speed GPS speed :00 02:26 04:53 07:19 09:46 12:13 14:39 17:06 19:32 21:59 24:26 26:52 Time (Min) 24
25 00: : : : : : : : : : : : : : : : : : : :29.2 Speed (mph) Speed Estimation Using PCA GPS Speed PCA Speed Time 25
26 Conclusions Developed an App and DB to collect high resolution data from smartphones The number of stops and their times can be estimated with relatively good accuracy Speed estimation with calibration is feasible for obtaining acceptable results Continue the research to develop more robust and accurate models 26
CONNECTED AUTOMATION HOW ABOUT SAFETY?
 CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
Toward Detection of Unsafe Driving with Wearables
 Toward Detection of Unsafe Driving with Wearables Luyang Liu Cagdas Karatas, Hongyu Li, Marco Gruteser, Richard Martin WINLAB, Rutgers University Sheng Tan, Jie Yang Florida State University Yingying Chen
Toward Detection of Unsafe Driving with Wearables Luyang Liu Cagdas Karatas, Hongyu Li, Marco Gruteser, Richard Martin WINLAB, Rutgers University Sheng Tan, Jie Yang Florida State University Yingying Chen
Harry s GPS LapTimer. Documentation v1.6 DRAFT NEEDS PROOF READING AND NEW SNAPSHOTS. Harry s Technologies
 Harry s GPS LapTimer Documentation v1.6 DRAFT NEEDS PROOF READING AND NEW SNAPSHOTS Harry s Technologies Scope This paper is part of LapTimer s documentation. It covers all available editions LapTimer
Harry s GPS LapTimer Documentation v1.6 DRAFT NEEDS PROOF READING AND NEW SNAPSHOTS Harry s Technologies Scope This paper is part of LapTimer s documentation. It covers all available editions LapTimer
SAFE DRIVING USING MOBILE PHONES
 SAFE DRIVING USING MOBILE PHONES PROJECT REFERENCE NO. : 37S0527 COLLEGE : SKSVMA COLLEGE OF ENGINEERING AND TECHNOLOGY, GADAG BRANCH : COMPUTER SCIENCE AND ENGINEERING GUIDE : NAGARAJ TELKAR STUDENTS
SAFE DRIVING USING MOBILE PHONES PROJECT REFERENCE NO. : 37S0527 COLLEGE : SKSVMA COLLEGE OF ENGINEERING AND TECHNOLOGY, GADAG BRANCH : COMPUTER SCIENCE AND ENGINEERING GUIDE : NAGARAJ TELKAR STUDENTS
Real-time Bus Tracking using CrowdSourcing
 Real-time Bus Tracking using CrowdSourcing R & D Project Report Submitted in partial fulfillment of the requirements for the degree of Master of Technology by Deepali Mittal 153050016 under the guidance
Real-time Bus Tracking using CrowdSourcing R & D Project Report Submitted in partial fulfillment of the requirements for the degree of Master of Technology by Deepali Mittal 153050016 under the guidance
Yang Zheng, Amardeep Sathyanarayana, John H.L. Hansen
 Email: {yxz131331,john.hansen}@utdallas.edu Slide 1 Blacksburg, VA USA, October 8, 2014 Yang Zheng, Amardeep Sathyanarayana, John H.L. Hansen Center for Robust Speech Systems (CRSS) Erik Jonsson School
Email: {yxz131331,john.hansen}@utdallas.edu Slide 1 Blacksburg, VA USA, October 8, 2014 Yang Zheng, Amardeep Sathyanarayana, John H.L. Hansen Center for Robust Speech Systems (CRSS) Erik Jonsson School
202 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 15, NO. 1, JANUARY 2016
 202 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 15, NO. 1, JANUARY 2016 SenSpeed: Sensing Driving Conditions to Estimate Vehicle Speed in Urban Environments Jiadi Yu, Member, IEEE, Hongzi Zhu, Member,
202 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 15, NO. 1, JANUARY 2016 SenSpeed: Sensing Driving Conditions to Estimate Vehicle Speed in Urban Environments Jiadi Yu, Member, IEEE, Hongzi Zhu, Member,
DD2-PRO+ Gps enabled Datalogger & display system mm (W) x 90mm (H) x 28mm (D) Datalogger Front 109mm (W) x 35mm (H) x 121mm (D) Datalogger Back
 x 90mm (H) x 28mm (D) Datalogger Front 109mm (W) x 35mm (H) x 121mm (D) Datalogger Back") DD2-PRO+ Gps enabled Datalogger & display system PRO Display - 160.4mm (W) x 90mm (H) x 28mm (D) Datalogger Front 109mm (W) x 35mm (H) x 121mm (D) Datalogger Back Feature Summary Display Programmable Speed
DD2-PRO+ Gps enabled Datalogger & display system PRO Display - 160.4mm (W) x 90mm (H) x 28mm (D) Datalogger Front 109mm (W) x 35mm (H) x 121mm (D) Datalogger Back Feature Summary Display Programmable Speed
APMP TCAUV Workshop The application of acoustics, vibration and ultrasound metrology in transportation industry
 APMP TCAUV Workshop The application of acoustics, vibration and ultrasound metrology in transportation industry The Analysis of Pole and Viaduct Structural Vibration Induced by High Speed Train Speaker
APMP TCAUV Workshop The application of acoustics, vibration and ultrasound metrology in transportation industry The Analysis of Pole and Viaduct Structural Vibration Induced by High Speed Train Speaker
An Evaluation Study of Driver Profiling Fuzzy Algorithms using Smartphones
 An Evaluation Study of Profiling Fuzzy Algorithms using Smartphones German Castignani University of Luxembourg / SnT german.castignani@uni.lu Raphaël Frank University of Luxembourg / SnT raphael.frank@uni.lu
An Evaluation Study of Profiling Fuzzy Algorithms using Smartphones German Castignani University of Luxembourg / SnT german.castignani@uni.lu Raphaël Frank University of Luxembourg / SnT raphael.frank@uni.lu
S06 Update 7th SHRP 2 Safety Research Symposium Washington, DC July 12, Driving Transportation with Technology VTTI 7/12/2012 1
 S06 Update 7th SHRP 2 Safety Research Symposium Washington, DC July 12, 2012 1 Executive Overview: Original NDS Targets Largest Naturalistic Driving Study Ever Undertaken ca. 3,100 primary drivers, all
S06 Update 7th SHRP 2 Safety Research Symposium Washington, DC July 12, 2012 1 Executive Overview: Original NDS Targets Largest Naturalistic Driving Study Ever Undertaken ca. 3,100 primary drivers, all
DIVISION V SURFACINGS AND PAVEMENTS
 36-3.01 GENERAL DIVISION V SURFACINGS AND PAVEMENTS 36 GENERAL 04-20-18 Replace section 36-3 with: 36-3 PAVEMENT SMOOTHNESS 36-3.01A Summary Section 36-3 includes specifications for measuring the smoothness
36-3.01 GENERAL DIVISION V SURFACINGS AND PAVEMENTS 36 GENERAL 04-20-18 Replace section 36-3 with: 36-3 PAVEMENT SMOOTHNESS 36-3.01A Summary Section 36-3 includes specifications for measuring the smoothness
arxiv: v2 [cs.cy] 10 Oct 2017
![arxiv: v2 [cs.cy] 10 Oct 2017](/thumbs/83/88948229.jpg "arxiv: v2 [cs.cy] 10 Oct 2017") Intelligent Pothole Detection and Road Condition Assessment arxiv:1710.02595v2 [cs.cy] 10 Oct 2017 Umang Bhatt Pittsburgh, PA umang@cmu.edu ABSTRACT Poor road conditions are a public nuisance, causing
Intelligent Pothole Detection and Road Condition Assessment arxiv:1710.02595v2 [cs.cy] 10 Oct 2017 Umang Bhatt Pittsburgh, PA umang@cmu.edu ABSTRACT Poor road conditions are a public nuisance, causing
Cooperative brake technology
 Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
SPEED IN URBAN ENV VIORNMENTS IEEE CONFERENCE PAPER REVIW CSC 8251 ZHIBO WANG
 SENSPEED: SENSING G DRIVING CONDITIONS TO ESTIMATE VEHICLE SPEED IN URBAN ENV VIORNMENTS IEEE CONFERENCE PAPER REVIW CSC 8251 ZHIBO WANG EXECUTIVE SUMMARY Brief Introduction of SenSpeed Basic Idea of Vehicle
SENSPEED: SENSING G DRIVING CONDITIONS TO ESTIMATE VEHICLE SPEED IN URBAN ENV VIORNMENTS IEEE CONFERENCE PAPER REVIW CSC 8251 ZHIBO WANG EXECUTIVE SUMMARY Brief Introduction of SenSpeed Basic Idea of Vehicle
Owner s Manual. MG2000 Speedometer IS0211. for use with SmartCraft Tachometer
 Owner s Manual MG2000 Speedometer for use with SmartCraft Tachometer IS0211 rev. E ecr#6395 08/2006 4/5/05 Changes 12/21 Index Description Available Functions for display page 1 Default Screens page 1
Owner s Manual MG2000 Speedometer for use with SmartCraft Tachometer IS0211 rev. E ecr#6395 08/2006 4/5/05 Changes 12/21 Index Description Available Functions for display page 1 Default Screens page 1
Journal of Emerging Trends in Computing and Information Sciences
 Pothole Detection Using Android Smartphone with a Video Camera 1 Youngtae Jo *, 2 Seungki Ryu 1 Korea Institute of Civil Engineering and Building Technology, Korea E-mail: 1 ytjoe@kict.re.kr, 2 skryu@kict.re.kr
Pothole Detection Using Android Smartphone with a Video Camera 1 Youngtae Jo *, 2 Seungki Ryu 1 Korea Institute of Civil Engineering and Building Technology, Korea E-mail: 1 ytjoe@kict.re.kr, 2 skryu@kict.re.kr
Comparison of Real-World Vehicle Emissions for Gasoline-Ethanol Fuel Blends
 Comparison of Real-World Vehicle Emissions for Gasoline-Ethanol Fuel Blends H. Christopher Frey (frey@ncsu.edu) Tongchuan Wei Weichang Yuan Nikhil Rastogi David Miller Larry Matheson Civil, Construction,
Comparison of Real-World Vehicle Emissions for Gasoline-Ethanol Fuel Blends H. Christopher Frey (frey@ncsu.edu) Tongchuan Wei Weichang Yuan Nikhil Rastogi David Miller Larry Matheson Civil, Construction,
Internal vibration monitoring of a Planetary Gearbox
 Internal vibration monitoring of a Planetary Gearbox Marc R. de Smidt M-Eng (Mechanical) What is a Planetary or Epicyclic Gearbox? Ring / Annulus gear Planet gears on Planet carrier Sun gear How does it
Internal vibration monitoring of a Planetary Gearbox Marc R. de Smidt M-Eng (Mechanical) What is a Planetary or Epicyclic Gearbox? Ring / Annulus gear Planet gears on Planet carrier Sun gear How does it
Towards Quality-Aware Big Data Integration for Crowdsourced Road Sensing System
 FINAL REPORT Towards Quality-Aware Big Data Integration for Crowdsourced Road Sensing System Date of report: November, 2017 Lu, Su, PhD, Assistant Professor, University at Buffalo Jing, Gao, PhD, Assistant
FINAL REPORT Towards Quality-Aware Big Data Integration for Crowdsourced Road Sensing System Date of report: November, 2017 Lu, Su, PhD, Assistant Professor, University at Buffalo Jing, Gao, PhD, Assistant
On the role of AI in autonomous driving: prospects and challenges
 On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
CS 188: Artificial Intelligence
 CS 188: Artificial Intelligence Advanced Applications: Robotics Pieter Abbeel UC Berkeley A few slides from Sebastian Thrun, Dan Klein 2 So Far Mostly Foundational Methods 3 1 Advanced Applications 4 Autonomous
CS 188: Artificial Intelligence Advanced Applications: Robotics Pieter Abbeel UC Berkeley A few slides from Sebastian Thrun, Dan Klein 2 So Far Mostly Foundational Methods 3 1 Advanced Applications 4 Autonomous
To put integrity before opportunity To be passionate and persistent To encourage individuals to rise to the occasion
 SignalQuest, based in New Hampshire, USA, designs and manufactures electronic sensors that measure tilt angle, acceleration, shock, vibration and movement as well as application specific inertial measurement
SignalQuest, based in New Hampshire, USA, designs and manufactures electronic sensors that measure tilt angle, acceleration, shock, vibration and movement as well as application specific inertial measurement
CRSM: Crowdsourcing based Road Surface Monitoring
 CRSM: Crowdsourcing based Road Surface Monitoring Kongyang Chen 1, Mingming Lu 2, Guang Tan 1, and Jie Wu 3 1SIAT, Chinese Academy of Sciences, 2 Central South University 3Temple University Nov. 15 th,
CRSM: Crowdsourcing based Road Surface Monitoring Kongyang Chen 1, Mingming Lu 2, Guang Tan 1, and Jie Wu 3 1SIAT, Chinese Academy of Sciences, 2 Central South University 3Temple University Nov. 15 th,
Welcome to Vibrationdata
 Welcome to Vibrationdata Acoustics Shock Vibration Signal Processing August 24 Newsletter Ahoy! Feature Articles Noise, Vibration, and Harshness (NVH) are important areas in automotive engineering. The
Welcome to Vibrationdata Acoustics Shock Vibration Signal Processing August 24 Newsletter Ahoy! Feature Articles Noise, Vibration, and Harshness (NVH) are important areas in automotive engineering. The
FANG Shouen Tongji University
 Introduction to Dr. Fang Shou en Communist Party secretary of Tongji University; Doctoral supervisor in Tongji University; Executive director of China Intelligent Transportation Systems Association (CITSA)
Introduction to Dr. Fang Shou en Communist Party secretary of Tongji University; Doctoral supervisor in Tongji University; Executive director of China Intelligent Transportation Systems Association (CITSA)
THE ACCELERATION OF LIGHT VEHICLES
 THE ACCELERATION OF LIGHT VEHICLES CJ BESTER AND GF GROBLER Department of Civil Engineering, University of Stellenbosch, Private Bag X1, MATIELAND 7602 Tel: 021 808 4377, Fax: 021 808 4440 Email: cjb4@sun.ac.za
THE ACCELERATION OF LIGHT VEHICLES CJ BESTER AND GF GROBLER Department of Civil Engineering, University of Stellenbosch, Private Bag X1, MATIELAND 7602 Tel: 021 808 4377, Fax: 021 808 4440 Email: cjb4@sun.ac.za
Final Report DEVELOPMENT OF A YARD HOSTLER ACTIVITY CYCLE. Submitted to:
 CAFEE Center for Alternative Fuels, Engines & Emissions West Virginia University Final Report DEVELOPMENT OF A YARD HOSTLER ACTIVITY CYCLE Submitted to: Brad Rutledge Senior Project Manager, CALSTART Florida
CAFEE Center for Alternative Fuels, Engines & Emissions West Virginia University Final Report DEVELOPMENT OF A YARD HOSTLER ACTIVITY CYCLE Submitted to: Brad Rutledge Senior Project Manager, CALSTART Florida
Pedestrian Dead-Reckoning (PDR) Tutorial
 Tutorial") RED DE POSICIONAMIENTO Y NAVEGACIÓN EN INTERIORES. Red de Excelencia del Ministerio de Economía y Competitividad del Gobierno de España Pedestrian Dead-Reckoning (PDR) Tutorial Dr. Antonio Ramón Jiménez
RED DE POSICIONAMIENTO Y NAVEGACIÓN EN INTERIORES. Red de Excelencia del Ministerio de Economía y Competitividad del Gobierno de España Pedestrian Dead-Reckoning (PDR) Tutorial Dr. Antonio Ramón Jiménez
DISTRACTED driving due to mobile devices contributes to
 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL., NO., 24 Determining Driver Phone Use by Exploiting Smartphone Integrated Sensors Yan Wang, Yingying Chen, Jie Yang, Marco Gruteser, Richard P. Martin, Hongbo
IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL., NO., 24 Determining Driver Phone Use by Exploiting Smartphone Integrated Sensors Yan Wang, Yingying Chen, Jie Yang, Marco Gruteser, Richard P. Martin, Hongbo
On Low Speed Problem in Road Smoothness Profiling. Vadim Peretroukhine Michael Nieminen. September 28,
 On Low Speed Problem in Road Smoothness Profiling Vadim Peretroukhine Michael Nieminen September 28, 2011 Problem Description Usually, the cruiser speed of inertial profiler is between 45 and 60 mph. Practically,
On Low Speed Problem in Road Smoothness Profiling Vadim Peretroukhine Michael Nieminen September 28, 2011 Problem Description Usually, the cruiser speed of inertial profiler is between 45 and 60 mph. Practically,
Intelligent Pothole Detection and Road Condition Assessment
 Intelligent Pothole Detection and Road Condition Assessment Umang Bhatt Electrical & Computer Eng. umang@cmu.edu Shouvik Mani Statistics & Machine Learning shouvikm@cmu.edu Edgar Xi Statistics & Machine
Intelligent Pothole Detection and Road Condition Assessment Umang Bhatt Electrical & Computer Eng. umang@cmu.edu Shouvik Mani Statistics & Machine Learning shouvikm@cmu.edu Edgar Xi Statistics & Machine
A STUDY OF HUMAN KINEMATIC RESPONSE TO LOW SPEED REAR END IMPACTS INVOLVING VEHICLES OF LARGELY DIFFERING MASSES
 A STUDY OF HUMAN KINEMATIC RESPONSE TO LOW SPEED REAR END IMPACTS INVOLVING VEHICLES OF LARGELY DIFFERING MASSES Brian Henderson GBB UK Ltd, University of Central Lancashire School of Forensic & Investigative
A STUDY OF HUMAN KINEMATIC RESPONSE TO LOW SPEED REAR END IMPACTS INVOLVING VEHICLES OF LARGELY DIFFERING MASSES Brian Henderson GBB UK Ltd, University of Central Lancashire School of Forensic & Investigative
Enhancing a Vehicle Re-Identification Methodology based on WIM Data to Minimize the Need for Ground Truth Data
 Enhancing a Vehicle Re-Identification Methodology based on WIM Data to Minimize the Need for Ground Truth Data Andrew P. Nichols, PhD, PE Director of ITS, Rahall Transportation Institute Associate Professor,
Enhancing a Vehicle Re-Identification Methodology based on WIM Data to Minimize the Need for Ground Truth Data Andrew P. Nichols, PhD, PE Director of ITS, Rahall Transportation Institute Associate Professor,
Grey Box System Identification of Bus Mass
 Grey Box System Identification of Bus Mass Darren Achtymichuk M. Sc. Student University of Alberta Department of Mechanical Engineering Project Background When analyzing vehicle dynamics, the mass of the
Grey Box System Identification of Bus Mass Darren Achtymichuk M. Sc. Student University of Alberta Department of Mechanical Engineering Project Background When analyzing vehicle dynamics, the mass of the
Bluetooth-Low-Energy based System for Automatic Public-Transport passengers' Movement data collection
 Bluetooth-Low-Energy based System for Automatic Public-Transport passengers' Movement data collection Yuval Hadas Department of Management, Bar-Ilan University, Israel Boaz Ben Moshe Department of Computer
Bluetooth-Low-Energy based System for Automatic Public-Transport passengers' Movement data collection Yuval Hadas Department of Management, Bar-Ilan University, Israel Boaz Ben Moshe Department of Computer
An overview of the on-going OSU instrumented probe vehicle research
 An overview of the on-going OSU instrumented probe vehicle research Benjamin Coifman, PhD Associate Professor The Ohio State University Department of Civil, Environmental, and Geodetic Engineering Department
An overview of the on-going OSU instrumented probe vehicle research Benjamin Coifman, PhD Associate Professor The Ohio State University Department of Civil, Environmental, and Geodetic Engineering Department
Spatial and Temporal Analysis of Real-World Empirical Fuel Use and Emissions
 Spatial and Temporal Analysis of Real-World Empirical Fuel Use and Emissions Extended Abstract 27-A-285-AWMA H. Christopher Frey, Kaishan Zhang Department of Civil, Construction and Environmental Engineering,
Spatial and Temporal Analysis of Real-World Empirical Fuel Use and Emissions Extended Abstract 27-A-285-AWMA H. Christopher Frey, Kaishan Zhang Department of Civil, Construction and Environmental Engineering,
Electromechanical Gyroscope-Accelerometer (invention)
") Electromechanical Gyroscope-Accelerometer (invention) Instrument Making Professor Karlo Moistsrapishvili E-mail: karlo.moistsrapishvili@gmail.com Georgian State University of Sport Tbilisi, Georgia Summary:
Electromechanical Gyroscope-Accelerometer (invention) Instrument Making Professor Karlo Moistsrapishvili E-mail: karlo.moistsrapishvili@gmail.com Georgian State University of Sport Tbilisi, Georgia Summary:
WHITE PAPER. Preventing Collisions and Reducing Fleet Costs While Using the Zendrive Dashboard
 WHITE PAPER Preventing Collisions and Reducing Fleet Costs While Using the Zendrive Dashboard August 2017 Introduction The term accident, even in a collision sense, often has the connotation of being an
WHITE PAPER Preventing Collisions and Reducing Fleet Costs While Using the Zendrive Dashboard August 2017 Introduction The term accident, even in a collision sense, often has the connotation of being an
Analysis and assessment of the electrification of urban transport based on real-life mobility data
 Analysis and assessment of the electrification of urban transport based on real-life mobility data Michele De Gennaro, Elena Paffumi, Harald Scholz, Giorgio Martini European Commission DG JRC at a glance
Analysis and assessment of the electrification of urban transport based on real-life mobility data Michele De Gennaro, Elena Paffumi, Harald Scholz, Giorgio Martini European Commission DG JRC at a glance
Pothole Tracker. Muhammad Mir. Daniel Chin. Mike Catalano. Bill Quigg Advisor: Professor Ciesielski
 Pothole Tracker Muhammad Mir. Daniel Chin. Mike Catalano. Bill Quigg Advisor: Professor Ciesielski Pothole Tracker Muhammad Mir CSE Team 5 Daniel Chin CSE Mike Catalano EE Bill Quigg EE Why are Potholes
Pothole Tracker Muhammad Mir. Daniel Chin. Mike Catalano. Bill Quigg Advisor: Professor Ciesielski Pothole Tracker Muhammad Mir CSE Team 5 Daniel Chin CSE Mike Catalano EE Bill Quigg EE Why are Potholes
Estimating Maximum Failure Rate For A Bus Rapid Transit Station
 INDIAN INSTITUTE OF TECHNOLOGY ROORKEE Estimating Maximum Failure Rate For A Bus Rapid Transit Station Dr. Ankit Kathuria Department of Civil Engg. IIT Roorkee Prof. M. Parida Professor Department of Civil
INDIAN INSTITUTE OF TECHNOLOGY ROORKEE Estimating Maximum Failure Rate For A Bus Rapid Transit Station Dr. Ankit Kathuria Department of Civil Engg. IIT Roorkee Prof. M. Parida Professor Department of Civil
Monitoring of switches & crossings (turnouts) and tracks
 and tracks") Monitoring of switches & crossings (turnouts) and tracks Elias Kassa, Amund Skavhaug Norwegian University of Science and Technology Amir M. Kaynia NGI Outline Background Analysis of turnout failure statistics
Monitoring of switches & crossings (turnouts) and tracks Elias Kassa, Amund Skavhaug Norwegian University of Science and Technology Amir M. Kaynia NGI Outline Background Analysis of turnout failure statistics
NASA University Student Launch Initiative (Sensor Payload) Final Design Review. Payload Name: G.A.M.B.L.S.
 Final Design Review. Payload Name: G.A.M.B.L.S.") NASA University Student Launch Initiative (Sensor Payload) Final Design Review Payload Name: G.A.M.B.L.S. CPE496-01 Computer Engineering Design II Electrical and Computer Engineering The University of
NASA University Student Launch Initiative (Sensor Payload) Final Design Review Payload Name: G.A.M.B.L.S. CPE496-01 Computer Engineering Design II Electrical and Computer Engineering The University of
REDUCING THE OCCURRENCES AND IMPACT OF FREIGHT TRAIN DERAILMENTS
 REDUCING THE OCCURRENCES AND IMPACT OF FREIGHT TRAIN DERAILMENTS D-Rail Final Workshop 12 th November - Stockholm Monitoring and supervision concepts and techniques for derailments investigation Antonella
REDUCING THE OCCURRENCES AND IMPACT OF FREIGHT TRAIN DERAILMENTS D-Rail Final Workshop 12 th November - Stockholm Monitoring and supervision concepts and techniques for derailments investigation Antonella
Insurer support of safety technology: benefits and barriers
 Insurer support of safety technology: benefits and barriers The National Academies Committee on Accelerating Progress to Reduce Alcohol-Impaired Driving Fatalities May 9, 2017 Jessica B. Cicchino iihs.org
Insurer support of safety technology: benefits and barriers The National Academies Committee on Accelerating Progress to Reduce Alcohol-Impaired Driving Fatalities May 9, 2017 Jessica B. Cicchino iihs.org
EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) TEST PROTOCOL SPEED ASSIST SYSTEMS
 TEST PROTOCOL SPEED ASSIST SYSTEMS") EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) TEST PROTOCOL SPEED ASSIST SYSTEMS Copyright 2015 Euro NCAP - This work is the intellectual property of Euro NCAP. Permission is granted for this material
EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) TEST PROTOCOL SPEED ASSIST SYSTEMS Copyright 2015 Euro NCAP - This work is the intellectual property of Euro NCAP. Permission is granted for this material
Real-world Versus Certification Emission Rates for Light Duty Gasoline Vehicles
 Real-world Versus Certification Emission Rates for Light Duty Gasoline Vehicles Tanzila Khan H. Christopher Frey Department of Civil, Construction and Environmental Engineering North Carolina State University
Real-world Versus Certification Emission Rates for Light Duty Gasoline Vehicles Tanzila Khan H. Christopher Frey Department of Civil, Construction and Environmental Engineering North Carolina State University
Background. Speed Prediction in Work Zones Using the SHRP 2 Naturalistic Driving Study Data
 Speed Prediction in Work Zones Using the SHRP 2 Naturalistic Driving Study Data Minnesota Towards Zero Deaths Conference October 2017 Shauna Hallmark, Amrita Goswamy, Omar Smadi, Sue Chrysler Background
Speed Prediction in Work Zones Using the SHRP 2 Naturalistic Driving Study Data Minnesota Towards Zero Deaths Conference October 2017 Shauna Hallmark, Amrita Goswamy, Omar Smadi, Sue Chrysler Background
Preliminary Alternatives Analysis Caltrain Modernization & High Speed Train Projects City of Millbrae
 Preliminary Alternatives Analysis Caltrain Modernization & High Speed Train Projects City of Millbrae Dominic Spaethling Regional Program Manager Bethany Williams Public Involvement Manager, HNTB April
Preliminary Alternatives Analysis Caltrain Modernization & High Speed Train Projects City of Millbrae Dominic Spaethling Regional Program Manager Bethany Williams Public Involvement Manager, HNTB April
ICT-Emissions driving cycles Laura Borgarello CRF
 ICT-Emissions driving cycles Laura Borgarello CRF ICT-Emissions Exploitation group workshop, Brussels, 2013-11-13 Objectives of activities Collection of driving profile data, covering different conditions
ICT-Emissions driving cycles Laura Borgarello CRF ICT-Emissions Exploitation group workshop, Brussels, 2013-11-13 Objectives of activities Collection of driving profile data, covering different conditions
HDS Gen2 Touch 2.0 software release addendum
 *988-10465-002* lowrance.com HDS Gen2 Touch 2.0 software release addendum This addendum documents new features included in the HDS Gen2 Touch 2.0 software upgrade. These features are not described in the
*988-10465-002* lowrance.com HDS Gen2 Touch 2.0 software release addendum This addendum documents new features included in the HDS Gen2 Touch 2.0 software upgrade. These features are not described in the
Vehicle Dynamics and Control
 Rajesh Rajamani Vehicle Dynamics and Control Springer Contents Dedication Preface Acknowledgments v ix xxv 1. INTRODUCTION 1 1.1 Driver Assistance Systems 2 1.2 Active Stabiüty Control Systems 2 1.3 RideQuality
Rajesh Rajamani Vehicle Dynamics and Control Springer Contents Dedication Preface Acknowledgments v ix xxv 1. INTRODUCTION 1 1.1 Driver Assistance Systems 2 1.2 Active Stabiüty Control Systems 2 1.3 RideQuality
Smart lighting luminaire Alexia
 Smart lighting luminaire Alexia Product information RoHS Sustainder An innovative new lighting company Sustainder is an innovative Dutch company that develops, manufactures and supplies intelligent public
Smart lighting luminaire Alexia Product information RoHS Sustainder An innovative new lighting company Sustainder is an innovative Dutch company that develops, manufactures and supplies intelligent public
Smart lighting luminaire Anne
 Smart lighting luminaire Anne Product information RoHS Sustainder An innovative new lighting company Sustainder is an innovative Dutch company that develops, manufactures and supplies intelligent public
Smart lighting luminaire Anne Product information RoHS Sustainder An innovative new lighting company Sustainder is an innovative Dutch company that develops, manufactures and supplies intelligent public
Sponsors. Rob Parkinson. Technical Head - Driveline and Transmission Systems Ricardo UK Ltd
 Sponsors Rob Parkinson Technical Head - Driveline and Transmission Systems Ricardo UK Ltd Rapid identification of transmission layouts for lowest vehicle energy consumption Rob Parkinson Technical Head,
Sponsors Rob Parkinson Technical Head - Driveline and Transmission Systems Ricardo UK Ltd Rapid identification of transmission layouts for lowest vehicle energy consumption Rob Parkinson Technical Head,
Fujitsu Intelligent Mobility Solution
 Fujitsu Intelligent Mobility Solution 20 th February, 2018 Global Business Division, Public Sector & Regional Sales Group, Fujitsu Limited Contents 1. About Fujitsu 2. Intelligent Mobility Solution 1 Contents
Fujitsu Intelligent Mobility Solution 20 th February, 2018 Global Business Division, Public Sector & Regional Sales Group, Fujitsu Limited Contents 1. About Fujitsu 2. Intelligent Mobility Solution 1 Contents
Prediction Model of Driving Behavior Based on Traffic Conditions and Driver Types
 Proceedings of the 12th International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, October 3-7, 29 WeAT4.2 Prediction Model of Driving Behavior Based on Traffic Conditions
Proceedings of the 12th International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, October 3-7, 29 WeAT4.2 Prediction Model of Driving Behavior Based on Traffic Conditions
Shared Transport experience from the UK
 experience from the UK Matthew Clark Tuesday 9 th August 2016 - context Technology and social change has enabled significant changes in transport Smartphone penetration In 2016 Colombia has 19 million
experience from the UK Matthew Clark Tuesday 9 th August 2016 - context Technology and social change has enabled significant changes in transport Smartphone penetration In 2016 Colombia has 19 million
P/N VEHICLE DYNAMICS MODULE
 Instruction Manual P/N 0-220 VEHICLE DYNAMICS MODULE STOP! - READ THIS BEFORE INSTALL OR USE! WARNING: THIS INSTALLATION MAY REQUIRE WELDING OR INTEGRATION INTO A VEHICLE'S ELECTRICAL SYSTEM. DAMAGE TO
Instruction Manual P/N 0-220 VEHICLE DYNAMICS MODULE STOP! - READ THIS BEFORE INSTALL OR USE! WARNING: THIS INSTALLATION MAY REQUIRE WELDING OR INTEGRATION INTO A VEHICLE'S ELECTRICAL SYSTEM. DAMAGE TO
Performance Measures Using
 Real-Time Arterial Traffic Performance Measures Using GPS-Equipped Vehicles Xiao Qin, PE, Ph.D. Jason Anderson, EIT Adam Wellner, EIT Department of Civil and Environmental Engineering South Dakota State
Real-Time Arterial Traffic Performance Measures Using GPS-Equipped Vehicles Xiao Qin, PE, Ph.D. Jason Anderson, EIT Adam Wellner, EIT Department of Civil and Environmental Engineering South Dakota State
UNIVERSITÉ DE MONCTON FACULTÉ D INGÉNIERIE. Moncton, NB, Canada PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY
 FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
A complete hybrid VTOL autopilot solution. Start anywhere, fly everywhere.
 Key Features A complete hybrid VTOL autopilot solution. Start anywhere, fly everywhere. Supported Vehicle Types s Multirotors Fixed-wings Bi-, tri- and quadcopter tailsitters, quadplanes and tiltrotors.
Key Features A complete hybrid VTOL autopilot solution. Start anywhere, fly everywhere. Supported Vehicle Types s Multirotors Fixed-wings Bi-, tri- and quadcopter tailsitters, quadplanes and tiltrotors.
Project Title: Using Truck GPS Data for Freight Performance Analysis in the Twin Cities Metro Area Prepared by: Chen-Fu Liao (PI) Task Due: 7/31/2013
 Task Due: 7/31/2013") Project Title: Using Truck GPS Data for Freight Performance Analysis in the Twin Cities Metro Area Prepared by: Chen-Fu Liao (PI) Task Due: 7/31/2013 TASK #3 PROCESS TRUCK GPS DATA AND DERIVE PERFORMANCE
Project Title: Using Truck GPS Data for Freight Performance Analysis in the Twin Cities Metro Area Prepared by: Chen-Fu Liao (PI) Task Due: 7/31/2013 TASK #3 PROCESS TRUCK GPS DATA AND DERIVE PERFORMANCE
Yard Hostler Duty Cycle Summary Brad Rutledge Nov. 27, Introduction
 Yard Hostler Duty Cycle Summary Brad Rutledge Nov. 27, 2009 Introduction A yard hostler duty cycle has been developed as part of the Hybrid Yard Hostler Demonstration and Commercialization Project funded
Yard Hostler Duty Cycle Summary Brad Rutledge Nov. 27, 2009 Introduction A yard hostler duty cycle has been developed as part of the Hybrid Yard Hostler Demonstration and Commercialization Project funded
Pedestrian Autonomous Emergency Braking Test Protocol (Version II) February 2019
 February 2019") Pedestrian Autonomous Emergency Braking Test Protocol (Version II) February 2019 Contents DOCUMENT REVISION HISTORY... ii SUMMARY... 1 TEST ENVIRONMENT... 2 Surface and Markings... 2 Surroundings... 2
Pedestrian Autonomous Emergency Braking Test Protocol (Version II) February 2019 Contents DOCUMENT REVISION HISTORY... ii SUMMARY... 1 TEST ENVIRONMENT... 2 Surface and Markings... 2 Surroundings... 2
Davis Wind Speed and Direction Smart Sensor (S-WCF-M003) Manual
 Manual") Davis Wind Speed and Direction Smart Sensor (S-WCF-M003) Manual The Davis Wind Speed and Direction smart sensor is designed to work with HOBO stations. The smart sensor has a plug-in modular connector
Davis Wind Speed and Direction Smart Sensor (S-WCF-M003) Manual The Davis Wind Speed and Direction smart sensor is designed to work with HOBO stations. The smart sensor has a plug-in modular connector
e-cfr Data is current as of October 31, 2012
 Page 1 of 11 ELECTRONIC CODE OF FEDERAL REGULATIONS e-cfr Data is current as of October 31, 2012 Title 49: Transportation PART 563 EVENT DATA RECORDERS Contents 563.1 Scope. 563.2 Purpose. 563.3 Application.
Page 1 of 11 ELECTRONIC CODE OF FEDERAL REGULATIONS e-cfr Data is current as of October 31, 2012 Title 49: Transportation PART 563 EVENT DATA RECORDERS Contents 563.1 Scope. 563.2 Purpose. 563.3 Application.
BigRoad. Scaling Road Data Acquisition for Dependable Self-Driving. The first two authors are co-primary student authors. *
 BigRoad Scaling Road Data Acquisition for Dependable Self-Driving Luyang Liu *, Hongyu Li *, Jian Liu #, Cagdas Karatas *, Yan Wang, Marco Gruteser *, Yingying Chen #, Richard P. Martin * The first two
BigRoad Scaling Road Data Acquisition for Dependable Self-Driving Luyang Liu *, Hongyu Li *, Jian Liu #, Cagdas Karatas *, Yan Wang, Marco Gruteser *, Yingying Chen #, Richard P. Martin * The first two
Oregon DOT Slow-Speed Weigh-in-Motion (SWIM) Project: Analysis of Initial Weight Data
 Project: Analysis of Initial Weight Data") Portland State University PDXScholar Center for Urban Studies Publications and Reports Center for Urban Studies 7-1997 Oregon DOT Slow-Speed Weigh-in-Motion (SWIM) Project: Analysis of Initial Weight Data
Portland State University PDXScholar Center for Urban Studies Publications and Reports Center for Urban Studies 7-1997 Oregon DOT Slow-Speed Weigh-in-Motion (SWIM) Project: Analysis of Initial Weight Data
Hierarchical service for integrating multimodal public transport system in Palembang, Indonesia
 Hierarchical service for integrating multimodal public transport system in Palembang, Indonesia Erika Buchari a 1 Centre of Excellence Multimodal Transportation of Sriwijaya University, Jl. Padang Selasa
Hierarchical service for integrating multimodal public transport system in Palembang, Indonesia Erika Buchari a 1 Centre of Excellence Multimodal Transportation of Sriwijaya University, Jl. Padang Selasa
ParkNet: Drive-by Sensing of Road-side Parking Statistics
 ParkNet: Drive-by Sensing of Road-side Parking Statistics Published by: Mathur, Suhas, Tong Jin, Nikhil Kasturirangan, Janani Chandrasekaran, Wenzhi Xue, Marco Gruteser, and Wade Trappe in Mobisys 2010.
ParkNet: Drive-by Sensing of Road-side Parking Statistics Published by: Mathur, Suhas, Tong Jin, Nikhil Kasturirangan, Janani Chandrasekaran, Wenzhi Xue, Marco Gruteser, and Wade Trappe in Mobisys 2010.
Using Smartphones to Estimate Road Pavement Condition
 Using Smartphones to Estimate Road Pavement Condition Viengnam Douangphachanh a Hiroyuki Oneyama a Abstract: Efficient road infrastructure maintenance and management depends on many factors, of which the
Using Smartphones to Estimate Road Pavement Condition Viengnam Douangphachanh a Hiroyuki Oneyama a Abstract: Efficient road infrastructure maintenance and management depends on many factors, of which the
United States Code of Federal Regulations Title 49 Part 563
 United States Code of Federal Regulations Title 49 Part 563 EVENT DATA RECORDERS. 563.1 Scope 563.2 Purpose 563.3 Application 563.4 Incorporation by reference 563.5 Definitions 563.6 Requirements for vehicles
United States Code of Federal Regulations Title 49 Part 563 EVENT DATA RECORDERS. 563.1 Scope 563.2 Purpose 563.3 Application 563.4 Incorporation by reference 563.5 Definitions 563.6 Requirements for vehicles
Crossbow Technology, Inc. All rights reserved. Information in this document is subject to change without notice. Crossbow and SoftSensor are
 DMU User s Manual Models IMU300CA- IMU300CB- IMU300CC- IMU400CA- IMU400CB- IMU400CC- VG300CA- VG300CB- IMU600CA- VG600CA- Revision A, March 2002 Document 7430-0003-01 Crossbow Technology, Inc., 41 E. Daggett
DMU User s Manual Models IMU300CA- IMU300CB- IMU300CC- IMU400CA- IMU400CB- IMU400CC- VG300CA- VG300CB- IMU600CA- VG600CA- Revision A, March 2002 Document 7430-0003-01 Crossbow Technology, Inc., 41 E. Daggett
Comparing G-Force Measurement Between a Smartphone App and an In-Vehicle Accelerometer
 University of Iowa Iowa Research Online Driving Assessment Conference 2017 Driving Assessment Conference Jun 28th, 12:00 AM Comparing G-Force Measurement Between a Smartphone App and an In-Vehicle Accelerometer
University of Iowa Iowa Research Online Driving Assessment Conference 2017 Driving Assessment Conference Jun 28th, 12:00 AM Comparing G-Force Measurement Between a Smartphone App and an In-Vehicle Accelerometer
OBI-M2. Compact and Rugged Combustion Analysis System for use on Vehicles, Motorbikes and Test Benches
 OBI-M2 Compact and Rugged Combustion Analysis System for use on Vehicles, Motorbikes and Test Benches OBI-M2 is an extremely compact and fully featured combustion analysis system suitable for use on test
OBI-M2 Compact and Rugged Combustion Analysis System for use on Vehicles, Motorbikes and Test Benches OBI-M2 is an extremely compact and fully featured combustion analysis system suitable for use on test
TRUELINE LEVELING SYSTEM
 TRUELINE LEVELING SYSTEM Installation & Operation Guide VTL01K011 Valid Manufacturing Ltd. Advanced Technologies Simple Solutions Trueline Leveling System Installation & Operation Guide 1 TABLE OF CONTENTS
TRUELINE LEVELING SYSTEM Installation & Operation Guide VTL01K011 Valid Manufacturing Ltd. Advanced Technologies Simple Solutions Trueline Leveling System Installation & Operation Guide 1 TABLE OF CONTENTS
The Transient Nature of Particle Emissions from Light Duty Hybrid Vehicles
 The Transient Nature of Particle Emissions from Light Duty Hybrid Vehicles Lisa A. Graham Environmental Technology Centre, Environment Canada 335 River Road, K1A 0H3 Ottawa, Ontario, Canada Martha Christenson
The Transient Nature of Particle Emissions from Light Duty Hybrid Vehicles Lisa A. Graham Environmental Technology Centre, Environment Canada 335 River Road, K1A 0H3 Ottawa, Ontario, Canada Martha Christenson
Wind Speed/Direction Smart Sensor (Part # S-WCA-M003)
") (Part # S-WCA-M003) The Wind Speed/Direction smart sensor is designed to work with the HOBO Stations. The smart sensor has a plug-in modular connector that allows it to be added easily to a HOBO Station.
(Part # S-WCA-M003) The Wind Speed/Direction smart sensor is designed to work with the HOBO Stations. The smart sensor has a plug-in modular connector that allows it to be added easily to a HOBO Station.
Lecture 19. Magnetic Bearings
 Lecture 19 Magnetic Bearings 19-1 Magnetic Bearings It was first proven mathematically in the late 1800s by Earnshaw that using only a magnet to try and support an object represented an unstable equilibrium;
Lecture 19 Magnetic Bearings 19-1 Magnetic Bearings It was first proven mathematically in the late 1800s by Earnshaw that using only a magnet to try and support an object represented an unstable equilibrium;
Smart Sensing Systems for the Daily Drive
 Smart Sensing Systems for the Daily Drive Sarfraz Nawaz *, Christos Efstratiou, and Cecilia Mascolo * * University of Cambridge University of Kent In recent years, there has been explosive growth in smartphone
Smart Sensing Systems for the Daily Drive Sarfraz Nawaz *, Christos Efstratiou, and Cecilia Mascolo * * University of Cambridge University of Kent In recent years, there has been explosive growth in smartphone
VG700AA User s Manual
 VG700AA- (DMU-FOG-AUTO) Rev. A, September 2002 Document 7430-0074-01 2002-2003 Crossbow Technology, Inc. All rights reserved. Information in this document is subject to change without notice. Crossbow
VG700AA- (DMU-FOG-AUTO) Rev. A, September 2002 Document 7430-0074-01 2002-2003 Crossbow Technology, Inc. All rights reserved. Information in this document is subject to change without notice. Crossbow
Deployment and Flight Test of Inflatable Membrane Aeroshell using Large Scientific Balloon
 1 Deployment and Flight Test of Inflatable Membrane Aeroshell using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori Nagata, Masashi Koyama (The
1 Deployment and Flight Test of Inflatable Membrane Aeroshell using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori Nagata, Masashi Koyama (The
Caliber: Road Quality Profiling
 Caliber: Road Quality Profiling Capstone Design Specification Samuel Quintana John Spencer James Uttaro Damien Hobday CSc 59866 : Senior Design Professor: Jie Wei Brief Team Caliber wants to map the quality
Caliber: Road Quality Profiling Capstone Design Specification Samuel Quintana John Spencer James Uttaro Damien Hobday CSc 59866 : Senior Design Professor: Jie Wei Brief Team Caliber wants to map the quality
Driver Monitoring System for Enhancing Road Safety
 Driver Monitoring System for Enhancing Road Safety Raksit THITIPATANAPONG Engineering Fellow, Smart Mobility Research Center Faculty of Engineering, Chulalongkorn University. smartmobility.cu@gmail.com
Driver Monitoring System for Enhancing Road Safety Raksit THITIPATANAPONG Engineering Fellow, Smart Mobility Research Center Faculty of Engineering, Chulalongkorn University. smartmobility.cu@gmail.com
EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) TEST PROTOCOL SPEED ASSIST SYSTEMS
 TEST PROTOCOL SPEED ASSIST SYSTEMS") EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) TEST PROTOCOL SPEED ASSIST SYSTEMS EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) TEST PROTOCOL SPEED ASSIST SYSTEMS Table of Contents 1 DEFINITIONS...
EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) TEST PROTOCOL SPEED ASSIST SYSTEMS EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) TEST PROTOCOL SPEED ASSIST SYSTEMS Table of Contents 1 DEFINITIONS...
Engineering Dept. Highways & Transportation Engineering
 The University College of Applied Sciences UCAS Engineering Dept. Highways & Transportation Engineering (BENG 4326) Instructors: Dr. Y. R. Sarraj Chapter 4 Traffic Engineering Studies Reference: Traffic
The University College of Applied Sciences UCAS Engineering Dept. Highways & Transportation Engineering (BENG 4326) Instructors: Dr. Y. R. Sarraj Chapter 4 Traffic Engineering Studies Reference: Traffic
David A. Ostrowski Global Data Insights and Analytics
 Big Data Drive: Supporting Product Analytics at Ford Motor through the employment of Big Data technologies David A. Ostrowski Global Data Insights and Analytics Page 1 Agenda Introduction Projects Fuel
Big Data Drive: Supporting Product Analytics at Ford Motor through the employment of Big Data technologies David A. Ostrowski Global Data Insights and Analytics Page 1 Agenda Introduction Projects Fuel
MEMS Sensors for automotive safety. Marc OSAJDA, NXP Semiconductors
 MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
MEMS Sensors for automotive safety Marc OSAJDA, NXP Semiconductors AGENDA An incredible opportunity Vehicle Architecture (r)evolution MEMS & Sensors in automotive applications Global Mega Trends An incredible
time in seconds Amy leaves diving board
 1 Amy dives from the high diving board at a swimming pool. Look at the graph of her motion. speed in m / s 15 10 Amy enters water P Q 5 0 0 0.5 1.0 1.5 2.0 2.5 time in seconds Amy leaves diving board (a)
1 Amy dives from the high diving board at a swimming pool. Look at the graph of her motion. speed in m / s 15 10 Amy enters water P Q 5 0 0 0.5 1.0 1.5 2.0 2.5 time in seconds Amy leaves diving board (a)
Contents Getting Started with PrePass ELD...4 Starting a Trip...7 During a Trip Co-Driver Features... 14
 UPDATED February 2, 2018 Contents Getting Started with PrePass ELD...4 Enroll in the PrePass ELD Program... 4 For a Carrier Enroll in the ELD Service... 4 For a Driver Get Driver Login Information... 4
UPDATED February 2, 2018 Contents Getting Started with PrePass ELD...4 Enroll in the PrePass ELD Program... 4 For a Carrier Enroll in the ELD Service... 4 For a Driver Get Driver Login Information... 4
PHYS 2212L - Principles of Physics Laboratory II
 PHYS 2212L - Principles of Physics Laboratory II Laboratory Advanced Sheet Faraday's Law 1. Objectives. The objectives of this laboratory are a. to verify the dependence of the induced emf in a coil on
PHYS 2212L - Principles of Physics Laboratory II Laboratory Advanced Sheet Faraday's Law 1. Objectives. The objectives of this laboratory are a. to verify the dependence of the induced emf in a coil on
Journey into quality for traffic monitoring equipment. Short session monitoring operations
 Journey into quality for traffic monitoring equipment Short session monitoring operations Introduction Quality assurance/quality control for short session portable equipment. Historically, quality assurance/quality
Journey into quality for traffic monitoring equipment Short session monitoring operations Introduction Quality assurance/quality control for short session portable equipment. Historically, quality assurance/quality
Exhibit F - UTCRS. 262D Whittier Research Center P.O. Box Lincoln, NE Office (402)
") UTC Project Information Project Title University Principal Investigator PI Contact Information Funding Source(s) and Amounts Provided (by each agency or organization) Exhibit F - UTCRS Improving Safety
UTC Project Information Project Title University Principal Investigator PI Contact Information Funding Source(s) and Amounts Provided (by each agency or organization) Exhibit F - UTCRS Improving Safety
series 2-Stage Servovalve Rated flows up to 80 l/m Features
 series 65 2-Stage Servovalve Rated flows up to 8 l/m Features Maximum operating pressure 15 bar ISO 172-4-4--92 mounting pattern Internal pilot supply (4 port) Suitable for -way or 4-way applications High
series 65 2-Stage Servovalve Rated flows up to 8 l/m Features Maximum operating pressure 15 bar ISO 172-4-4--92 mounting pattern Internal pilot supply (4 port) Suitable for -way or 4-way applications High
Evaluation of the suitability to European conditions of the WNTE control zone concept as set out in the OCE GTR
 Evaluation of the suitability to European conditions of the WNTE control zone concept as set out in the OCE GTR Henk Dekker - TNO Stefan Hausberger, Martin Rexeis - TUG Patrik Soltic EMPA Heinz Steven
Evaluation of the suitability to European conditions of the WNTE control zone concept as set out in the OCE GTR Henk Dekker - TNO Stefan Hausberger, Martin Rexeis - TUG Patrik Soltic EMPA Heinz Steven
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%